机械原理 第七版 孙桓 PPT课件
《机械原理》课件第1章绪论说课材料
常用机构的研究 已经非常深入 自动控制机构、机器人机构、仿生机构、机电光液 综合机构等进展也非常大 计算机的应用:计算机辅助设计、优化设计、大 型通用或专用的软件等
机械原理课程的性质与任务
是研究机械性能分析与设计的基本理论与 方法的专业基础课程之一。
机械原理的教学内容(归纳起来三大点)
动力机器
发电机等是能量变换的装置,即可将某种 形式的能量变换成机械能,或者把机械能 变换成其他形式的能量。例如:内燃机、 压气机、涡轮机、电动机等。
机器
工作机器 是完成有用的机械功或者是搬运物品。
例如:轧钢机、织布机、缝纫机、汽
车、飞机和金属切削加工机床等。
信息机器 是用来获得和变换信息的。例如:机 械式积分仪、计帐机、打字机和绘图 仪。
§1-3 如何进行本课程的学习
教学环节:
理论教学 课程设计
学习方法:
1. 在学习知识的同时,注重能力的培养。 2. 在重视逻辑思维的同时,加强形象思维能力的培养。 3. 注意先修课程的应用。 4. 理论联系实际,能够做到举一反三。
§1-4 机械原理学科的发展现状及趋势
机械工业发展方向:
高速、高精度、重载、高效率、低噪声 先进制造技术的应用、激光制造 自动生产线机器与其它来自置的主要区别是:机器一定要作机械运
动,并 通过运动来实现能量物料和信息的变换
机构(mechanism) 用来传递运动和力或改变运动形
式的构件系统
机构和机器的区别
• 机构只是一个构件系统,而机器除构件系 统外,还包含电气、液压等其它系统
• 机构只用来传递运动和力,而机器除传递 运动和力外,还具有变换或传递能量、物 料和信息的功能
1、研究机构的组成及具有确定运动的条件。
机械原理(第七版) 孙桓主编 第3章
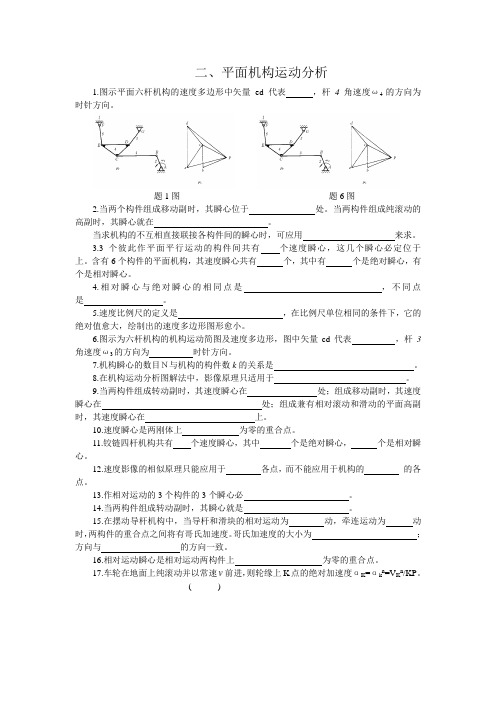
二、平面机构运动分析1.图示平面六杆机构的速度多边形中矢量ed代表,杆4角速度ω4的方向为时针方向。
题1图题6图2.当两个构件组成移动副时,其瞬心位于处。
当两构件组成纯滚动的高副时,其瞬心就在。
当求机构的不互相直接联接各构件间的瞬心时,可应用来求。
3.3个彼此作平面平行运动的构件间共有个速度瞬心,这几个瞬心必定位于上。
含有6个构件的平面机构,其速度瞬心共有个,其中有个是绝对瞬心,有个是相对瞬心。
4.相对瞬心与绝对瞬心的相同点是,不同点是。
5.速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
6.图示为六杆机构的机构运动简图及速度多边形,图中矢量cd代表,杆3角速度ω3的方向为时针方向。
7.机构瞬心的数目N与机构的构件数k的关系是。
8.在机构运动分析图解法中,影像原理只适用于。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10.速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
14.当两构件组成转动副时,其瞬心就是。
15.在摆动导杆机构中,当导杆和滑块的相对运动为动,牵连运动为动时,两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为;方向与的方向一致。
16.相对运动瞬心是相对运动两构件上为零的重合点。
17.车轮在地面上纯滚动并以常速v前进,则轮缘上K点的绝对加速度αK=αk n=V K n/KP。
---------------------------------------( )18.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。
---( )19.在图示机构中,已知ω1及机构尺寸,为求解C 2点的加速度,只要列出一个矢量方程a C2=a B2+a n C2B2+a t C2B2就可以用图解法将a C2求出。
机械原理(第七版) 孙桓主编 第7章

十、机械的稳定运转及其速度波动的调节1.设某机器的等效转动惯量为常数,则该机器作匀速稳定运转的条件是,作变速稳定运转的条件是。
2.机器中安装飞轮的原因,一般是为了,同时还可获得的效果。
3.在机器的稳定运转时期,机器主轴的转速可有两种不同情况,即稳定运转和稳定运转,在前一种情况,机器主轴速度是,在后一种情况,机器主轴速度是。
4.机器中安装飞轮的目的是和。
5.某机器的主轴平均角速度ωm=100rad/s,机器运转的速度不均匀系数δ=0.05,则该机器的最大角速度ωmax等于rad/s,最小角速度ωmin等于rad/s。
6.某机器主轴的最大角速度ωmax=200rad/s,最小角速度ωmin=190rad/s,则该机器的主轴平均角速度ωm等于rad/s,机器运转的速度不均匀系数δ等于。
7.机器等效动力学模型中的等效质量(转动惯量)是根据的原则进行转化的,因而它的数值除了与各构件本身的质量(转动惯量)有关外,还与。
8.机器等效动力学模型中的等效力(矩)是根据的原则进行转化的,等效质量(转动惯量)是根据的原则进行转化的。
9.机器等效动力模型中的等效力(矩)是根据的原则进行转化的,因而它的数值除了与原作用力(矩)的大小有关外,还与有关。
10.若机器处于起动(开车)阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
11.若机器处于停车阶段,则机器的功能关系应是,机器主轴转速的变化情况将是。
12.用飞轮进行调速时,若其它条件不变,则要求的速度不均匀系数越小,飞轮的转动惯量将越,在满足同样的速度不均匀系数条件下,为了减小飞轮的转动惯量,应将飞轮安装在轴上。
13.当机器运转时,由于负荷发生变化使机器原来的能量平衡关系遭到破坏,引起机器运转速度的变化,称为,为了重新达到稳定运转,需要采用来调节。
14.在机器稳定运转的一个运动循环中,运动构件的重力作功等于,因为。
15.机器运转时的速度波动有速度波动和速度波动两种,前者采用,后者采用进行调节。
机械原理第七版孙恒第一章
§1-3
如何进行本课程的学习
逐步建立工程观点
认真对待每个教学环节
机器和机构的概念
(1)机构
机构 是指一种用来传递与变换运动和力的可动装置。 如常 见的机构有带传动机构、链传动机构、齿轮机构、凸轮机构、螺 旋机构等等。 这些机构一般被认为是由刚性件组成的。而现代机构中除了 Evaluation only. 刚性件以外,还可能有弹性件和电、磁、液、气、声、光…等元 eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0 故这类机构称为广义机构;而由刚性件组成的机构就称为狭 件。 义机构。 Copyright 2004-2011 Aspose Pty Ltd.
实际工程问题都是涉及多方面的因素的问题,其求解可采用 多种方法,其解一般也不是唯一的。这就要求设计者具有分析、 判断、决策的能力,要养成综合分析、全面考虑问题的习惯和科 学严谨、一丝不苟的工作作风。
认真对待教学的每一个环节
本课程全部教学工作的完成,需要自学、听课、习题课、实 验课、课后作业、答疑和考试,以及课程设计等教学环节。 要学好这门课,首先必须对每个教学环节予以充分重视。其 次,还要转变被动学习方式为自主学习方式。
(地点:航空楼D308 ~ D318)
Evaluation only. eated with Aspose.Slides for .NET 机械创新设计教学中心 3.5 Client Profile 5.2.0 Copyright 2004-2011 Aspose Pty Ltd.
开放课程学习室和网络教学环境
(2)机器 机器 是指一种执行机械运动装置,可用来变换和传递能量、 物料和信息。 例如: 电动机、内燃机用来变换能量;
孙恒《机械原理》课件讲义
机构结构分析的内容及目的 机构的组成 机构运动简图 机构具有确定运动的条件 平面机构自由度的计算 平面机构的组成原理、结构分类 及结构分析
§2-1 机构结构分析的内容及目的
1、研究机构的组成及机构运动简图的画法 ; 2、了解机构具有确定运动的条件; 3、研究机构的组成原理及结构分类。
2)确定机架 3)确定各构件之间的运动副种类
“两两分析相对运动” 4)代表回转副的小圆,其圆心必须与相对运动
回转中心重合。代表移动副的滑块,其导路 方向必须与相对运动方向一致。 5)比例、符号、线条、标号
§2-5 平面机构自由度的计算
1. 平面机构的自由度:机构所具有的独立运动。 2. 平面机构的自由度计算公式
2. 要除去局部自由度( F' ) 局部自由度:某些不影响机构运动的自由度。
3. 要除去虚约束( p' ) 虚约束:在机构运动中,有些约束对机构自由度的影响
是重复的。
3. 要除去虚约束( p' ) 虚约束:在机构运动中,有些约束对机构自由度的影响
是重复的。 •机构中的虚约束常发生在下列情况:
1)如果转动副联接的是两构件上运动 轨迹相重合的点,则该联接将带入 1个虚约束。
本章结束
第二章 机构的结构分析
基本要求:了解机构的组成;搞清运动副、运动链、约 束和自由度等基本概念;能绘制常用机构的 运动简图;能计算平面机构的自由度;对平 面机构组成的基本原理有所了解。
重 点:运动副和运动链的概念;机构运动简图的绘 制;机构具有确定运动的条件及机构自由度 的计算。
难 点:在机构自由度的计算中有关虚约束的识别及 处理问题。
机械原理课件(第七版)

在机械系统方案设计中,综合原理的应用可以帮助设计师 更好地理解系统的功能和性能要求,发现潜在的问题和解 决方案,提高设计的可行性和可靠性。
THANKS FOR WATCHING
感谢您的观看
定义
机械效率是指机械在工作中所 做的有用功与总功的比值。
影响因素
机械效率受到多种因素的影响 ,如机械设计、制造精度、润 滑条件、摩擦类型和材料性质 等。
提高效率的方法
为了提高机械效率,可以采取 优化设计、改善制造工艺、选 择合适的润滑剂和减少摩擦阻 力等措施。
实验测定
机械效率可以通过实验测定, 常用的方法有功率法、扭矩法
平面机构的动态动力分析
总结词
动态动力分析的应用
VS
详细描述
动态动力分析在机械设计中具有重要应用 ,如优化机构设计、提高机构性能、预测 机构运动行为等。通过动态动力分析,可 以更好地理解机构在不同条件下的运动规 律和受力情况,为机械设计提供重要的理 论支持和实践指导。
05 机械的效率和自锁
机械的效率
机械原理课件(第七版)
目 录
• 绪论 • 机构的结构分析 • 平面机构的运动分析 • 平面机构的力分析 • 机械的效率和自锁 • 机械的平衡 • 机械的运转及其速度波动的调节 • 机械系统的方案设计
01 绪论
机械原理课程的性质和内容
总结词
介绍机械原理课程的基本性质和主要内容,包括机械系统、机构、机器和装置等 基本概念和原理。
以及它们之间的相互关系。
03
等效转动惯量
等效转动惯量是指在机械运转过程中,为了模拟机械的转动状态所需要
用到的等效转动惯量。等效转动惯量的大小取决于机械内部各部件的转
机械原理(第七版)孙桓主编第10章
机械原理(第七版)孙桓主编第10章六、齿轮机构设计1.渐开线直齿圆柱齿轮传动的主要优点为和2.渐开线齿廓上K点的压力角应是所夹的锐角,齿廓上各点的压力角都不相等,在基圆上的压力角等于3.满足正确啮合条件的一对渐开线直齿圆柱齿轮,当其传动比不等于1时,它们的齿形是的。
4.一对渐开线直齿圆柱齿轮无齿侧间隙的条件是5.渐开线直齿圆柱齿轮的正确啮合条件是6.为了使一对渐开线直齿圆柱齿轮能连续定传动比工作,应使实际啮合线段大于或等于7.一对渐开线直齿圆柱齿轮啮合传动时,两轮的圆总是相切并相互作纯滚动的,而两轮的中心距不一定总等于两轮的圆半径之和。
8.当一对外啮合渐开线直齿圆柱标准齿轮传动的啮合角在数值上与分度圆的压力角相等时,这对齿轮的中心距为9.一对渐开线直齿圆柱齿轮传动,其啮合角的数值与圆上的压力角总是相等。
10.按标准中心距安装的渐开线直齿圆柱标准齿轮,节圆与重合,啮合角在数值上等于上的压力角。
11.相啮合的一对直齿圆柱齿轮的渐开线齿廓,其接触点的轨迹是一条线。
12.齿轮分度圆是指的圆;节圆是指的圆。
13.渐开线上任意点的法线必定与基圆,直线齿廓的基圆半径为14.渐开线齿轮的可分性是指渐开线齿轮中心距安装略有误差时,15.共轭齿廓是指一对的齿廓。
16.标准齿轮除模数和压力角为标准值外,还应当满足的条件是17.决定渐开线标准直齿圆柱齿轮尺寸的参数有;写出用参数表示的齿轮尺寸公式:r=;rb=;ra=;rf=18.渐开线齿廓上任一点的法线必定切于圆,渐开线外齿轮齿廓曲线在齿轮的圆上的压力角为最大值。
19.用范成法加工渐开线直齿圆柱齿轮,发生根切的原因是20.齿条刀具与普通齿条的区别是21.开线标准直齿圆柱齿轮不发生根切的最少齿数为22.当直齿圆柱齿轮的齿数少于zmin时,可采用变位的办法来避免根切。
23.齿廓啮合基本定律为:互相啮合的一对齿廓,其角速度之比与成反比。
如要求两角速度之比为定值,则这对齿廓在任何一点接触时,应使两齿廓在接触点的公法线24.决定单个渐开线标准直齿圆柱齿轮几何尺寸的五个基本参数是,其中参数是标准值。
机械原理孙恒课件

构件
构成机构的基本单元,通 过运动副连接。
运动链
由两个或多个构件通过运 动副连接而成的闭环系统 。
平面机构的运动简图
简化机构
将实际机构中的非关键部 分忽略,突出其主要运动 特性。
绘制简图
使用简单的线条和符号表 示机构中的构件和运动副 。
标注参数
在简图中标注出机构的主 要参数,如长度、角度等 。
平面机构的自由度计算
注重对各种机械系统的了解和比较, 掌握不同类型机械系统的特点和设计 方法
注重对基本概念和基本理论的掌握, 打好基础,逐步提高分析和解决问题 的能力
积极参与课堂讨论和小组学习,与同 学和老师交流心得,提高学习效果和 学习效率
02 平面机构的结构分析
平面机构的组成
01
02
03
运动副
将构件相互连接,并确定 其相对运动的装置。
状态。
虚功原理
对于一个平衡的系统,所有主动 力对任意虚位移所做的虚功总和 等于所有阻力对同一虚位移所做
的虚功总和。
虚位移法的应用
通过分析机构中各构件的虚位移 和作用力,求出机构的平衡条件
和平衡力矩。
机构力分析的动态静力法
动态静力法
基于牛顿第二定律,通过分析机构中各构件的质量和加速度,求 出机构中各点的反作用力。
相对运动分析法在机构运动分析中的应用
相对运动原理
当两构件之间存在相对运动时,可以通过将一个构件视为固定,另一个构件视 为动体来分析相对运动。
应用
通过相对运动分析法,可以求解机构中各构件之间的相对位移、相对速度和相 对加速度,进一步确定各运动副中的约束反力和力矩。
04 平面机构的力分析
机构力分析的基本概念
机械原理(第七版)孙桓主编第2章
机械原理(第七版)孙桓主编第2章一、平面机构结构分析1.组成机构的要素是和;构件是机构中的单元体。
2.具有、、等三个特征的构件组合体称为机器。
3.机器是由、、所组成的。
4.机器和机构的主要区别在于。
5.从机构结构观点来看,任何机构是由三部分组成。
6.运动副元素是指。
7.构件的自由度是指;机构的自由度是指。
8.两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度。
9.机构中的运动副是指。
10.机构具有确定的相对运动条件是原动件数机构的自由度。
11.在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。
12.平面运动副的最大约束数为,最小约束数为。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。
15.计算机机构自由度的目的是_________________________________________________________________________________________________________________ _________________。
16.在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
17.计算平面机构自由度的公式为F= ,应用此公式时应注意判断:(A) 铰链,(B) 自由度,(C) 约束。
18.机构中的复合铰链是指;局部自由度是指;虚约束是指。
19.划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。
20.机构运动简图是的简单图形。
31.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组组成的。
----------------------( )32.一种相同的机构组成不同的机器。
(A) 可以; (B) 不能33.机构中的构件是由一个或多个零件所组成,这些零件间产生任何相对运动。
机械原理课件第七版ppt

机械系统是由多个相互关联的机器与机构组成的复杂系统, 机械原理课程也涉及到对机械系统的整体性能、优化设计以 及控制等方面的研究。
机械原理课程的内容和任务
内容
机械原理课程主要涉及机构学、机械动力学、机械系统运动学、机械振动以及 机械控制等方面的内容。
任务
通过学习机械原理课程,学生可以掌握机构分析、设计、优化以及控制的基本 理论和方法,培养其解决实际工程问题的能力,为后续的专业课程学习和工程 实践打下坚实的基础。
机械原理课件第七版
汇报人:
202X-12-30
目录
Contents
• 绪论 • 机构组成与分析 • 平面连杆机构 • 凸轮机构 • 齿轮机构
目录
Contents
• 轮系 • 其他常用机构简介 • 机械的运转及其速度波动的调节 • 机械的平衡
01 绪论
机械原理课程的研究对象
机器与机构
机器是一种能够将输入的能量转换为输出的机械能的装置, 而机构则是实现运动和力的传递与变换的装置。机械原理课 程主要研究各种机器与机构的工作原理、组成、运动特性以 及能量转换进程。
05 齿轮机构
齿轮机构的特点和分类
特点
齿轮机构是机械传动中最重要的 机构之一,具有传递效率高、结 构紧凑、工作可靠等优点。
分类
根据齿轮的形状和传动方式,齿 轮机构可分为直齿圆柱齿轮机构 、斜齿圆柱齿轮机构、圆锥齿轮 机构等。
齿轮的构造及模数
构造
齿轮由齿廓、齿根、齿面等部分组成 ,其中齿廓是决定齿轮传动性能的关 键部分。
。
机构运动简图
机构运动简图的作用
注意事项
机构运动简图可以直观地表示机构的 组成和运动情况,便于对机构进行分 析和设计。