无陀螺捷联惯导系统综述
基于MEMS加速度计的无陀螺惯导系统

Gyro free inertial navigation system based on MEMS accelerometer
YUE Peng 1, SHI Zhen 1 , WANG Jian2, YANG Jie 1 (1. College of Automation, Harbin Engineering University, Harbin 150001, China; 2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
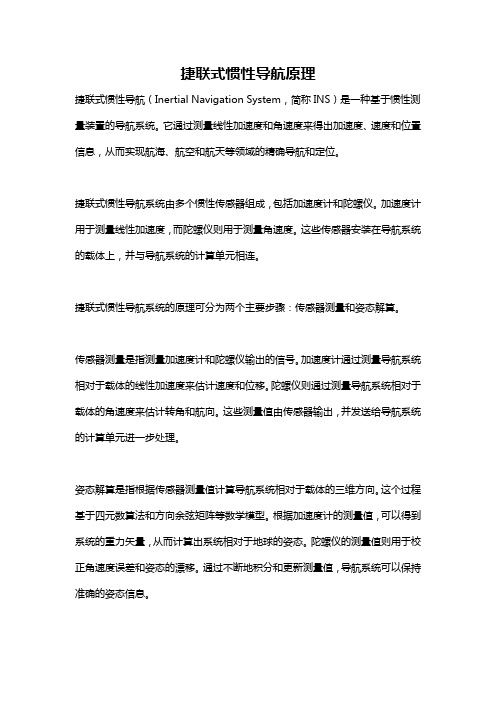
表 1 加速度计配置方案与角速度解算方法 Tab.1 Accelerometer configuration solution and method with angular velocity 六加速度 计配置 获得 信息 角速 度解 算法 九加速度 计配置 十二加速度 计配置
, 最新
的隧道电流式 MEMS 加速度计精度更是可以达到 1×
0.15
Oi
0.1 error of angular velocity(rad/s)
Xe
0.05
ቤተ መጻሕፍቲ ባይዱ
图1
坐标系间矢量图
Fig.1 The sketch map of relationship between frames
0
可见:
R′ = R + L
-0.05
(1)
-0.1
由哥氏定理,对 L 求二阶导为:
I = ω ib × L + ωib × (ωib × L) L
-0.15
(2) (3)
-0.2
积分法 开方法 微分法 0 10 20 30 40 50 time(s) 60 70 80 90 100
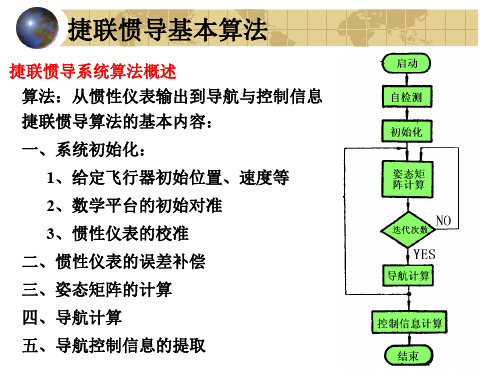
捷联惯导系统算法.ppt
cos
b Ebz
注意事项:当 θ= 90 度时,方程出现奇点
姿态计算 矩阵方程精确解1
二、方向余弦矩阵微分方程及其解 C C
其中
C bE
CbE
b Eb
0
b Eb
z
z
0
y
x
y x
0
由于陀螺仪直接测得的是载体 相对惯性空间的角速度,所以:
CbE
b ib
E iE
C
E b
或四元数微分方程:
q(t)
(
b ib
b iE
)q(t)
注意事项: 1、上述两个方程中的角速度表达式不一样 2、方程第二项较小,计算时速度可以低一些
增量算法 矩阵方程精确解
一、角增量算法
角增量:陀螺仪数字脉冲输出,每个脉冲代表一个角增量
一个采样周期内,陀螺输出脉冲数对应的角增量为:
C
0
0
c os
0 0 0 sin
sin
sin
c os
cos cos
求解欧拉角速率得
1 0
0
cos
0 sin
惯性器件的误差补偿
姿态计算 欧拉角微分方程1
姿态矩阵的计算 假设数学坐标系模拟地理坐标系 飞行器姿态的描述:
航向角ψ、俯仰角θ、滚动角γ 一、欧拉微分方程
从地理坐标系到载体坐标系 的旋转顺序:
Ψ →θ →γ
惯性导航文献综述报告

一、引言惯性技术是惯性制导、惯性导航与惯性测量等技术的统称。
惯性技术已应用于军用与民用的众多技术领域中,应用于宇宙飞船、火箭、导弹、飞机、舰船等各种运载器上。
在各类导航系统(例如无线电导航、天文导航等)中,惯性导航系统被认为是最有发展前途的一种导航系统。
惯性导航系统依照惯性原理,利用惯性元件(加速度计和陀螺仪)来测量载体本身的加速度和角速度,经一系列运算后得到载体的导航参数,从而达到对载体导航定位的目的。
惯性导航是一种自主式的导航方法,它既不需要向外界发送信号,也不需要从外界接收信号,所以,它具有隐蔽性好,工作不受气象条件制约和外界干扰等优点,从而广泛地应用于军用和民用的众多领域中。
随着现代数学、现代控制理论与计算机技术的发展,在平台惯导系统的基础上又发展出了捷联惯导系统。
捷联系统是将惯性元件(陀螺和加速度计)直接安装在载体上,直接承受载体角运动,不再需要稳定平台和常平架系统的惯性导航系统。
捷联管道系统使用数学平台而非物理平台,简化了平台框架和相连的伺服装置,因而消除了平台稳定过程中的误差,简化了硬件,提高了可靠性和可维护性,降低了成本,体积小、重量轻。
在捷联惯导系统中,用加速度计代替陀螺仪测量运动载体的角速度,称为无陀螺捷联惯导系统(The Gyroscope Free Strapdown Inertial Navigation System,简称GFSINS)。
GFSINS舍弃了陀螺,所以能够避开由于陀螺的抗震性差、恢复时间长、动态范围小等缺陷所引起的一系列难以解决的关键技术问题。
目前无陀螺捷联惯导系统给的研究已经引起了国内外很多专家学者的重视。
无陀螺捷联惯导系统成本低,可靠性高,功率低,寿命长,反应速度快,适用于角加速度大、角速度动态范围大、冲击大的载体的惯性导航,也适合一些较短程飞行器的惯性制导,还可以与其它导航装置组成组合导航系统。
无陀螺捷联惯导系统虽然具有多种突出的优点,但也有美中不足之处。
捷联惯导算法与组合导航原理讲义
捷联惯导算法与组合导航原理讲义一、捷联惯导算法捷联惯导(Inertial Navigation System,INS)是一种通过测量惯性传感器的运动参数实现导航定位的技术。
惯性导航系统中包括了加速度计和陀螺仪等传感器,通过测量物体的加速度和角速度,可以推算出物体的位置、速度和姿态等信息。
1.1加速度计加速度计是一种测量物体加速度的传感器。
常见的加速度计有基于压电效应的传感器和基于微机电系统(Microelectromechanical System,MEMS)的传感器。
加速度计的原理是通过测量物体受到的惯性力,推算出物体的加速度。
由于加速度是速度对时间的导数,因此通过对加速度的积分操作,可以计算出物体的速度和位移。
1.2陀螺仪陀螺仪是一种测量物体角速度的传感器。
常见的陀螺仪有机械陀螺仪和MEMS陀螺仪等。
陀螺仪的原理是基于角动量守恒定律,通过测量转动惯量的变化,推算出物体的角速度。
与加速度计类似,通过对角速度的积分操作,可以计算物体的姿态。
1.3捷联惯导算法离散时间模型中,位置、速度和姿态等状态变量通过积分加速度和角速度来更新。
由于加速度计和陀螺仪测量结果存在噪声,因此在积分操作时需要加入误差补偿算法来消除误差。
常见的误差补偿算法有零偏校正和比例积分修正等。
连续时间模型中,位置、速度和姿态等状态变量通过微分方程来描述,并通过求解微分方程来更新状态。
由于计算量较大,通常需要使用数值积分方法来求解微分方程。
常见的数值积分方法有欧拉法、中点法和四阶龙格-库塔法等。
二、组合导航原理组合导航是一种融合多种导航技术的导航方式。
常见的组合导航方式有捷联惯导与GPS组合导航。
组合导航通过融合多种导航系统的测量结果,可以提高导航定位的精度和可靠性。
2.1捷联惯导与GPS组合导航捷联惯导与GPS组合导航是一种常见的组合导航方式。
在这种方式下,捷联惯导提供了高频率的惯导数据,可以提供较高的定位精度,但是由于其测量结果累积误差较大,会逐渐偏离真实轨迹。
§3.7捷联式惯导系统介绍4

而
Ctb = (Cbt ) −1 = Cbt
位置信息 重力计算
gt
固连于载体 坐标系的加 速度计
哥氏校正
fb
比力测量值 的分解
ft
∑
∑
速度ve 和 位置的估 计值
t
导航计算
Cbt
固连于载体 的陀螺
ω
速度和位置的初始估计值
b ib
姿态计算
t t ωie + ωet
姿态的初始估值
图 捷联式惯性导航系统——地理坐标系机械编排
重力加速度
r r v v r g = G − ωie × [ωie × r ]
于是
i &ei = f i − ωie v × vei + g i
加速度计提供的载体坐标系中比力的测量值,用向量 f b 表示。为 了建立导航方程,加速度计的输出必须分解到惯性系中,得到 f i
f i = Cbi f b
式中 Cbi 是一个 3 × 3 的矩阵,定义了载体坐标系相对于 i 系的姿态。利 用陀螺提供的角速度的测量值,可求解方向余弦矩阵 Cbi
b 标系 Oe X iYi Z i 的角速度 ωib ,上角标 b 表示该角速度在 b 坐标系上的投 b 进行姿态矩阵 Cbi 计算。由于姿态矩阵 Cbi 中的元素是 影。利用 ωib
OX bYb Z b 相对 OX iYi Z i 的航向角、横滚角、俯仰角的三角函数构成,
所以当求得了姿态矩阵 Cbi 的即时值,便可进行加速度计信息的坐标 变换和提取姿态角的大小。 这三项功能实际上就代替了平台式惯性导 航系统中的稳定平台的功能, 这样计算机中的这三项功能也就是所谓
第二,在平台式系统中,计算机只完成导航计算并对惯性元件的 误差进行简单补偿。而在捷联式系统中,计算机除完成导航计算外 捷联式系统对计算机的容量、 速度和精度要求要比平台式惯导系统高 得多。计算机问题是捷联式惯导系统发展的另一障碍。但是近年来, 由于计算技术的惊人发展,满足捷联式系统购要求已不成问题,它已 经成为促进捷联式导航系统发展的积极因素。 第三,捷联式系统比平台式系统可靠性高,这是它的一个突出优 点。 这首先是由于捷联式系统用数字电路代替了平台式系统的复杂的 框架。 提高机电系统的可靠性要比提高电子部件特别是数子电路的可 靠性困难得多。 另外, 如果平台发生故障, 必须用另一个备用平台(包 括三个陀螺、三个或两个加速度计)取而代之才能继续完成导航任务。 而在捷联式系统中,任何一个惯性元件发生故障,只要用一个备用惯 性元件取而代之就行了。美国有人对 100 套惯导系统作过统计,由液 浮陀螺组成的平台式系统平均每工作 100 万小时发生故障 1832 次, 而捷联式系统只有 744 次。 第四,捷联式系统另一个突出优点是成本比较低。这主要是因为 在平台式系统中框架及其有关的元部件占去成本的大部分。另外,捷 联式系统维护比较简单方便,又进—步降低了维护费用。—套平台式 惯导系统的成本约为 6 万美元, 而相应的捷联式系统成本只需 2 万美 元。 第五,捷联式系统由于取消了笨重的框架结构、力矩电机、角度
捷联惯导详细讲解
捷联惯导系统从20世纪60年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-downinertialnavigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
一、捷联惯导系统工作原理及特点惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。
捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位置参数。
如采用指令+捷联式惯导捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。
除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。
捷联惯导系统

作业思考题
1、简要说明捷联惯导系统的基本组成和原理。 2、什么是数学平台?它有什么作用?
惯性导航系统
第四十四讲 捷联惯导系统 力学编排方程(一)
捷联式惯导系统(SINS)
加速度计
fb
数学平台
姿态矩阵 Cbp
f p 导航 速度、位置
计算机 姿态、航向
姿态矩阵计算
陀螺
ibb
pbb
b ip
姿态航向
-
C11 C21 C31
Cep 1 Cep T
C12 C13 1 C11 C21
C22
C23
C12
C22
C32 C33 C13 C23
C11 C22C33 C23C32 C21 C13C32 C12C33 C31 C12C23 C22C13
C31
C32
C33
位置矩阵微分方程组
Cep 0 f 0,0,0
1
p p epx epy
g g egx egy
R VeggxVeggy
VeppxVeppy
三、位置速率方程
11
p p epx epy
g g egx egy
RN RE
捷联惯导的发展
1、1950年起,德雷珀实验室捷联系统得到成熟的探索; 2、1969年,在“阿波罗-13”宇宙飞船,备份捷联惯导系统; 3、20世纪80~90年代,波音757/767、A310民机以及F-20战 斗机上使用激光陀螺惯导系统,精度达到1.85km/h的量级; 4、20世纪90年代,美国军用捷联式惯导系统已占有90% 。光 纤陀螺的捷联航姿系统已用于战斗机的机载武器系统中及波 音777飞机上。 5、国内由90年代挠性捷联惯导到现在激光捷联惯导、光纤陀 螺捷联航姿系统。
六加速度计的GFSINS/GPS组合导航系统研究
惯 导 系统 工 作 原理 类 似 。 陀螺 制 作 工 艺复 杂 , 本 较 成 高 , 且 功 耗大 , 以承 受 大 的 线 加速 度 和 角 速 度冲 而 难 击 。对于 战术导 弹 、小 型炮 弹等来讲 , 无陀螺 捷联惯 导 系统 由于合 弃 了陀 螺 , 具有 体 积小 、能 耗小 、成 本 低 、 动态 范 围大 、反 应快 、寿命 长和 可靠性高 的优势 , 能够
导系统误差方程 , 利用卡尔曼滤波器组 成了 G S NS GP 组 合导航 系统 。 FI / S 经仿真验证 , 该组合导航 系统可 以有效抑制导航参
数发散 。
关键 词 : 无陀螺捷联惯导 ; 误差方程 ; 卡尔 曼滤 波; P GS
中图分类号 : 2 16 V 4 .2 文献标识码 : A 文章编号 :0 3 2 12 1)l 0 4 0 1 0 7 4 (0 1l一 0 7 5
通 信 与 信 息 处 理
Comm u c to d l f r ton Pr e s n nia i n an n o ma i oc s i
自动化技 术与应用 2 1 0 1年第 3 O卷第 l 1期
六加速度计 的 GF / I S GP S N S组合导航 系统研究
Re e rho SI s ac f GF NS/ GPS Itg ae vg t nSy tm e rtdNa iai se n o
r、
aS d On i- cel Om e er e x Ac er t
l
,、
‘
-
0
●
S e, A HIZh n W NG u-h , Xi z i CONG e f n W n. g e
要 的意 义 。
基于DSP的无陀螺捷联惯导系统设计
维普资讯
2o 。 o8 8
Ap ia i n o CU & P D pl to f c M L
命、 高可靠 性 、 高 过 载 等 。特 别 适 用 于 常 规 陀螺 抗 仪难 以应用 的特定 场合 , 自旋 导 弹 、 能 炮 弹 等 。 如 智
维普资讯
z o4 8 o s  ̄A
繁8 期
胞 子 测 试
Ag 0 u. 0 28
No8 .
基 于 DS P的无 陀螺捷 联原 00 5 ) 3 0 1
( 中北 大学 仪 器科 学与动态 测试 教育部重点实验室
Kew rs D P; pn igP oet e yo cp - e ; ta ~o y od : S S inn rjci ;g rso ef e S rpd wn l r
来组 成捷 联惯 导 的测 量组 合 , 为无 陀 螺捷 联 惯 导 称
0 引
言
系统 (h yo c p resrpd wn iet l a i t eg rso efe ta -o ri v— n an
g t nsse GF I ) 目前 的研 究 发 现无 陀螺 ai ytm, SNS 。 o
用加速度计代替陀螺仪 , 并且从加速度计量测 的比力中解算 出载体的角速度 , 进而只用加速度计
捷 联惯 导 系统适 用 于大 动态 范 围 、 导航 时 间较 短 的
载体的惯性 制导, 优点是 低成本 、 其 低功耗 、 寿 长
A src: i mi o I et lMe s rme tS se (MS p l d t pn ig poete wa btat Ths c n ri au e n y tm I )a pi o s inn rjci s r a e l su id t stehg pno epoet eta esrp d wniet l a iains se cn t de .I i h ih s i ft rjci h tt ta- o ri vg t y tm a — h l h n an o
无陀螺捷联惯性导航系统

是没 有机 械式 陀螺稳 定 平 台 , 没有 陀螺 仪 , 也 其惯
性 测 量单元 完 全 由加 速 度 计 构 成 。 由此 可 知 , 通
过Байду номын сангаас 加速度 计 输 出信 息的计 算 可获得 载体 坐标 系
的信 息 。
其 中 , ) 表 示 载 体 动 点 相 对 ,系 的 位 置 向 量 , ( , () 示 动点相 对 b坐标 系 的位 置 向量 , 表示 r 表
此 , 用成 本低 、 使 体积 小 的加 速度 计取 代 陀螺 实现 制导很 有发 展 前景 。 目前 。国 内外竞 相 开展 了无 陀螺捷 联惯 性测 量单 元 的研 究 ¨ 。无 陀 螺捷 联
惯导 系统 即用 加 速 度 计 测量 线 加速 度 的 同时 , 根
2 力 学原 理
关 键 词 : 陀螺 捷 联 惯 导 系 统 ; 性 导 航 ;加 速 度 计 无 惯
中 图 分 类 号 : 65 7 U 7 .3
文献 标 识 码 : A
文 章 编 号 :6 3—3 8 (0 6 0 05 0 17 15 2 0 )2— 0 7— 5
Gy o c pe Fr e S r p- wn I e ta v g to y t m r s o e t a Do n r i lNa i a i n S s e
p r Th vg t n a d me h n c rncp e o e. e na iai n c a i sp i i l fGFS NS i nay e o I sa lz d,t r e c n i u ainso c ee — h e o fg r to fa c l r
b坐标 系相对 , 坐标 系 的转 动 角 速度 。若 P点 固 定在 b坐标 系 上 , ( 、 等 于 0 则 ) ( 就 ) 。这样 , 在
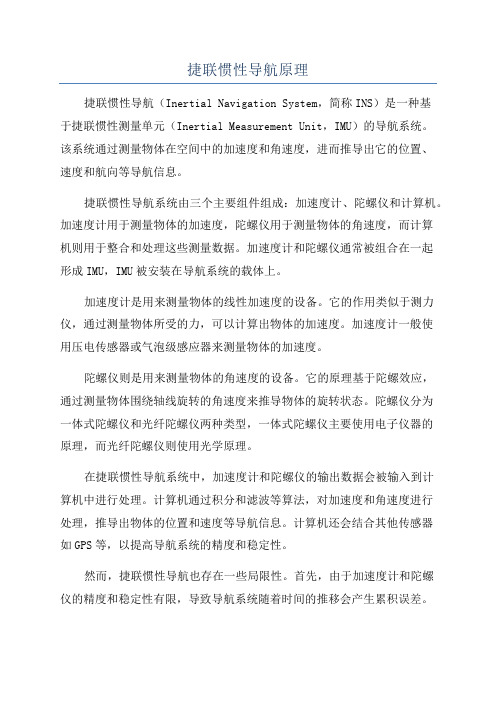
捷联惯性导航原理概要

捷联惯性导航原理概要捷联惯性导航(Inertial Navigation System,简称INS)是一种基于惯性力学原理运行的导航系统,用于测量和跟踪物体的位置、速度和加速度。
它通过内部的陀螺仪和加速度计来测量物体在空间中的运动状态,并根据质量、力和运动的基本原理来计算物体的位置和速度。
通过将陀螺仪和加速度计的输出信号转换为数字信号,并通过计算机处理,可以获得物体相对于初始参考点的位置和速度。
这些数据可以通过与地图或导航系统的集成来确定物体的位置和方向。
捷联惯性导航系统的原理是基于牛顿运动定律和旋转不变性原理。
根据牛顿第一定律,当物体处于惯性坐标系中且不受任何力的作用时,它将保持静止或匀速直线运动。
根据牛顿第二定律,当物体受到外力作用时,它将产生加速度。
根据旋转不变性原理,即物理量在不同坐标系下具有相同的数值,陀螺仪和加速度计可以测量物体的角速度和加速度,从而得到物体的位置和速度。
捷联惯性导航系统具有高精度和高稳定性的优势,尤其适用于无法使用其他导航系统(如GPS)或需要高精度导航的环境。
然而,它也存在一些局限性。
首先,由于陀螺仪和加速度计的测量误差和漂移,容易导致导航误差的累积。
其次,捷联惯性导航系统无法提供绝对位置信息,需要与其他导航系统集成才能获得绝对位置。
为了提高捷联惯性导航系统的性能,可以采用多传感器融合技术。
通过将多种导航系统(例如GPS、地图、惯性导航)的输出数据进行融合,可以提高导航的精度和可靠性,同时减少漂移和误差的影响。
总之,捷联惯性导航系统是一种基于惯性力学原理运行的导航系统,利用陀螺仪和加速度计测量物体的运动状态,并根据质量、力和运动的基本原理计算物体的位置和速度。
它具有高精度和高稳定性的优势,但也存在一些局限性,需要与其他导航系统集成才能获得绝对位置信息。
通过多传感器融合技术的应用,可以进一步提高捷联惯性导航系统的性能。
捷联惯性导航原理
捷联惯性导航原理捷联惯性导航(Inertial Navigation System,简称INS)是一种基于捷联惯性测量单元(Inertial Measurement Unit,IMU)的导航系统。
该系统通过测量物体在空间中的加速度和角速度,进而推导出它的位置、速度和航向等导航信息。
捷联惯性导航系统由三个主要组件组成:加速度计、陀螺仪和计算机。
加速度计用于测量物体的加速度,陀螺仪用于测量物体的角速度,而计算机则用于整合和处理这些测量数据。
加速度计和陀螺仪通常被组合在一起形成IMU,IMU被安装在导航系统的载体上。
加速度计是用来测量物体的线性加速度的设备。
它的作用类似于测力仪,通过测量物体所受的力,可以计算出物体的加速度。
加速度计一般使用压电传感器或气泡级感应器来测量物体的加速度。
陀螺仪则是用来测量物体的角速度的设备。
它的原理基于陀螺效应,通过测量物体围绕轴线旋转的角速度来推导物体的旋转状态。
陀螺仪分为一体式陀螺仪和光纤陀螺仪两种类型,一体式陀螺仪主要使用电子仪器的原理,而光纤陀螺仪则使用光学原理。
在捷联惯性导航系统中,加速度计和陀螺仪的输出数据会被输入到计算机中进行处理。
计算机通过积分和滤波等算法,对加速度和角速度进行处理,推导出物体的位置和速度等导航信息。
计算机还会结合其他传感器如GPS等,以提高导航系统的精度和稳定性。
然而,捷联惯性导航也存在一些局限性。
首先,由于加速度计和陀螺仪的精度和稳定性有限,导致导航系统随着时间的推移会产生累积误差。
其次,在长时间的运动过程中,加速度计和陀螺仪可能受到震动、振动和温度变化等外界因素的影响,进而导致导航系统的精度下降。
为了解决这些问题,通常将捷联惯性导航系统与其他导航系统如GPS进行组合导航。
通过将两种导航系统的输出数据进行融合,可以克服各自的缺点,提高导航系统的精度和鲁棒性。
总结起来,捷联惯性导航是一种基于物体惯性特性的导航系统,通过测量物体的加速度和角速度,推导出物体的位置、速度和航向等导航信息。
无陀螺捷联惯导系统模型研究
c mua ieer rd r igfo t eslt no i e e t l q ain e u e n h c u a yo h u lt ro ei n rm h ou i fdf rn i u to si rd cd a d t ea c r c ft e v v o f ae s
( 海军工程大学 兵器工程系,湖北 武汉 4 0 3 ) 3 0 3
摘要 : 无陀螺捷联惯导系统采用加速度计来解算载体相对惯 性系的角速度, 从而代替角速度
陀螺仪 。考 虑 重力 影响, 两种 不 同配置 方式 的 6加速 度 计捷 联 惯 导 系 统建 立 了载体 运 动参 数解 对
算模型, 在此基础上提 出了一种 1 加速度计配置方 式, 2 从而利用多传 感器 的冗余信 息对算法进行 优化, 消除 了角速度解算过程 中求解微分方程带来 的累积误差, 提高 了角速度解算精度。 关键词 : 飞行器控制、 导航技术; 无陀螺 ; 捷联惯导; 加速度计;配置 中图分类号 : J6 T75 文献标志码: A 文章编号 : 0019 (060 . 8—5 10 — 32 0 )20 80 0 2
c m p t d a g lrv lct si c e s d o u e n ua eo i i n r a e . y K y wo d :c n r la d n vg t n f r f g e il ;g r s o e fe ;s r p d wn i e ta n v g t n; e r s o to n a i a i o l h v h ce y o c p —r e t a — o n ril a i a i o i o a c lr m ee ;c n iu a i n c eeo t r o f r t g o
无陀螺捷联惯导系统现状及发展研究
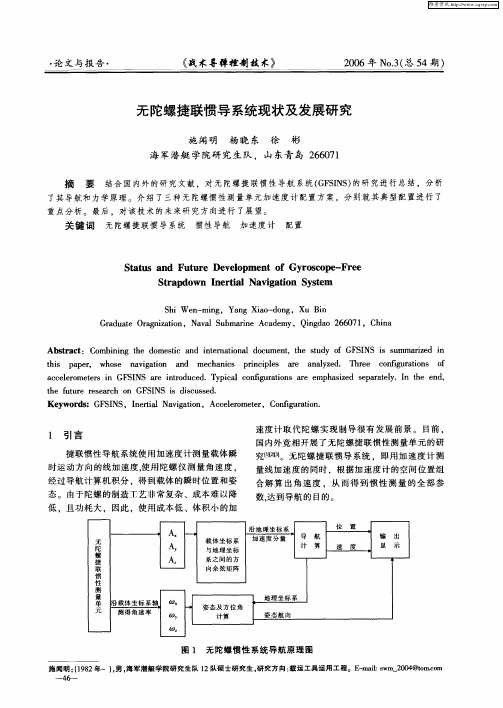
1 引 言
捷联惯 性 导航 系统使 用加 速度 计测 量载体 瞬 时运 动 方 向的线 加速 度 。 用 陀螺 仪测 量 角速 度 , 使 经过 导航计 算 机积分 ,得到 载体 的瞬 时位 置和姿 态 。 由于陀螺 的制 造工 艺非 常复 杂 、成 本难 以降 低 ,且功 耗大 ,因此 ,使用 成本 低 、体 积小 的加
A =( I + [R)+ Q 】0 ・ () 1
没有 机械 式陀 螺稳 定平 台 ,也没 有陀 螺仪 ,其 惯
性测 量单 元完 全 由加速 度计 构成 。 由此可 知 ,通
『0 其中,l=l l 0
过 对加 速度计 输 出信 息的计 算 ,可获 得载 体 坐标
系的信 息 。
了其 导航和 力 学原理 。介 绍 了三种 无 陀螺惯性 测量 单元 加速度 计 配置方 案 ,分 别就 其典 型配 置进行 了 重 点分析 。最 后 ,对 该技 术 的未来研 究方 向进 行 了展望 。
关 键 词 无陀螺捷联惯导系统 惯性导航
加速度计 配置
S a u n t r v l p e to r s o e F e t t s a d Fu u e De eo m n f Gy o c p - r e
Ab ta t C mbnn h o si n nen t n o u n,te su y o S N s s mmaie n sr c : o i ig te d met a d itrai a d c me t h td f GF I S i u c ol rzd i
姿 态 航 向
图 1 无 陀螺惯 性 系统 导 航原理 图
施 闻 明 :1 8 年 一 )男 , 军潜 艇学 院研 究生 队 1 (9 2 , 海 2队硕 士研究 生 , 究方 向 : 研 载运 工具 运用工 程。E ma w _ 0 4 trc m - i s m 20 @ o o k m
捷联惯导算法及车载组合导航系统研究

2、GPS和捷联惯导组合导航系统具有互补性,可以实现优势互补,提高导航 系统的性能。
然而,本研究仍存在一些不足之处。首先,对于GPS和捷联惯导组合导航系 统的具体实现方法,尚未进行详细探讨。未来研究可以进一步深入研究系统的硬 件实现方法、软件算法等具体技术细节。其次,虽然本次演示对GPS和捷联惯导 组合导航系统的应用
参考内容
引言
随着科技的不断发展,导航系统在军事、民用等领域的应用越来越广泛。其 中,全球定位系统(GPS)和捷联惯导组合导航系统受到了高度重视。本次演示 旨在分析GPS和捷联惯导组合导航系统的研究现状、方法、结果和展望,以期为 相关领域的研究和实践提供参考。
研究方法
本次演示采用文献综述和理论分析相结合的方法,对GPS和捷联惯导组合导 航系统进行深入研究。首先,收集并阅读相关文献,了解GPS和捷联惯导组合导 航系统的发展历程、研究现状和应用场景。其次,从系统组成、工作原理、性能 特点等方面,对GPS和捷联惯导组合导航系统进行理论分析。
结论
本次演示对捷联惯导算法和车载组合导航系统进行了详细的研究和介绍。捷 联惯导算法作为一种重要的惯性导航算法,具有广泛的应用前景。车载组合导航 系统则是智能驾驶领域的一种重要技术,可以提高导航精度和可靠性。随着科技 的不断进步,
对于捷联惯导算法和车载组合导航系统的研究将会不断深入,出现更多的研 究成果和应用实例。未来的研究方向可以包括进一步优化捷联惯导算法以提高其 精度和稳定性,以及研究更为复杂的车载组合导航系统以适应更加复杂的道路环 境和驾驶任务。
捷联惯导算法及车载组合导航 系统研究
01 引言
目录
02 捷联惯导算法研究
03
车载组合导航系统研 究
04 结论
05 参考内容
捷联式惯性导航原理
捷联式惯性导航原理捷联式惯性导航(Inertial Navigation System,简称INS)是一种基于惯性测量装置的导航系统。
它通过测量线性加速度和角速度来得出加速度、速度和位置信息,从而实现航海、航空和航天等领域的精确导航和定位。
捷联式惯性导航系统由多个惯性传感器组成,包括加速度计和陀螺仪。
加速度计用于测量线性加速度,而陀螺仪则用于测量角速度。
这些传感器安装在导航系统的载体上,并与导航系统的计算单元相连。
捷联式惯性导航系统的原理可分为两个主要步骤:传感器测量和姿态解算。
传感器测量是指测量加速度计和陀螺仪输出的信号。
加速度计通过测量导航系统相对于载体的线性加速度来估计速度和位移。
陀螺仪则通过测量导航系统相对于载体的角速度来估计转角和航向。
这些测量值由传感器输出,并发送给导航系统的计算单元进一步处理。
姿态解算是指根据传感器测量值计算导航系统相对于载体的三维方向。
这个过程基于四元数算法和方向余弦矩阵等数学模型。
根据加速度计的测量值,可以得到系统的重力矢量,从而计算出系统相对于地球的姿态。
陀螺仪的测量值则用于校正角速度误差和姿态的漂移。
通过不断地积分和更新测量值,导航系统可以保持准确的姿态信息。
捷联式惯性导航系统的优势在于其自主性和抗干扰能力。
由于不依赖于外部信号源,如卫星或地面控制点,INS可以在任何环境中进行导航。
同时,由于惯性传感器对外部扰动的响应速度很快,导航系统可以及时纠正估计误差,从而实现高精度的导航和定位。
然而,捷联式惯性导航系统也存在一些缺点。
由于惯性传感器存在漂移和积分误差,INS的导航信息随着时间的推移会变得不准确。
此外,惯性传感器的准确性和稳定性也会受到温度、振动和电磁干扰等因素的影响。
为了解决这些问题,通常需要与其他导航系统,如全球定位系统(GPS)或地面测量系统(如激光测距仪),进行组合导航。
总的来说,捷联式惯性导航系统是一种基于惯性传感器测量的导航系统。
它通过测量线性加速度和角速度,计算出加速度、速度和位置信息。
捷联式惯性导航系统原理

1、方向余弦表cos cos sin sin sin sin cos cos sin sin cos sin sin cos cos cos sin cos sin sin sin cos sin sin cos sin cos cos cos C ψϕψθϕψϕψθϕθϕψθψθθψϕψθϕψϕψθϕθϕ-+-⎡⎤⎢⎥=-⎢⎥⎢⎥+-⎣⎦(1.0.1)X E Y C N Z ζ⎡⎤⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(1.0.2) 在列写惯导方程需要采用方向余弦表,因为错误!未找到引用源。
α较小,经常采用两个假设,即:cos 1sin 1αα≈≈ (1.0.3)式中 α-两坐标系间每次相对转动的角度。
由于在工程实践中可以使其保持很小,所以进一步可以忽略如下形式二阶小量,即:sin sin 0αβ≈ (1.0.4)式中β-两坐标系间每次相对转动的角度。
可以将C 近似写为:111C ψϕψθϕθ-⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦(1.0.5) 2、用四元素表示坐标变换对于四元素123q p i p j p k λ=+++,可以表示为如下形式cossincos sincos sincos 2222q i j k θθθθαβγ=+++ (2.0.1)式(2.0.1)的四元数称为特殊四元数,它的范数1q =。
1'R q Rq -= (2.0.2)式中''''R xi yj zk R x i y j z k=++=++ (2.0.3)将q 和1q -的表达式及式(2.0.3)带入(2.0.2),然后用矩阵表示为:()()()()()()()()()22221231231322222123213231222213223131222''22'22p p p p p p p p p x x y p p pp p p p p p yz z p p p p p p p p p λλλλλλλλλ⎡⎤+--+-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+--+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥+-+--⎣⎦(2.0.4)由四元素到方向余弦表的建立123cos cos22sin cos22sin sin22cos sin22p p p θψϕλθψϕθψϕθψϕ-=-=-=+= (2.0.5) 将式(2.0.5)带入式(2.0.4),有cos cos sin cos sin cos sin sin cos cos sin sin sin cos cos cos sin sin sin cos cos cos cos sin sin sin sin cos cos C ϕψϕθψϕψϕθψϕθϕψϕθψϕψϕθψϕθθψθψθ-+⎡⎤⎢⎥=---+⎢⎥⎢⎥-⎣⎦(2.0.6)3、四元数转动公式的进一步说明采用方向余弦矩阵描述飞行器姿态运动时,需要积分姿态矩阵微分方程式,即C C =Ω (3.0.1)式中 C -动坐标系相对参考坐标系的方向余弦阵Ω-动坐标系相对参考坐标系角速度ω的反对称矩阵表达式 其中C 为公式(1.0.5)提供000z y zx y xωωωωωω⎡⎤-⎢⎥Ω=-⎢⎥⎢⎥-⎣⎦(3.0.2)采用(3.0.1)计算需要列写9个一阶微分方程式,计算量大。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种基于惯性测量单元(IMU)的导航技术,其通过测量物体的加速度和角速度信息,结合数字积分算法,实现对物体运动状态的精确估计和导航。
SINS具有高精度、抗干扰能力强、无需外部辅助等优点,在军事、航空、航天、航海等领域具有广泛的应用前景。
本文将重点研究捷联惯性导航系统的关键技术,包括传感器技术、算法技术以及系统集成技术。
二、传感器技术研究1. 陀螺仪技术陀螺仪是SINS的核心部件之一,其性能直接影响到整个系统的精度和稳定性。
目前,常用的陀螺仪包括机械陀螺、光学陀螺和微机电系统(MEMS)陀螺等。
其中,MEMS陀螺因其体积小、重量轻、成本低等优点,在SINS中得到了广泛应用。
然而,MEMS陀螺的精度和稳定性仍需进一步提高。
因此,研究高性能的MEMS陀螺制造技术和材料,以及优化其工作原理和结构,是提高SINS性能的关键。
2. 加速度计技术加速度计是SINS的另一个重要传感器,其测量精度和稳定性对SINS的导航性能有着重要影响。
目前,常用的加速度计包括压阻式、电容式和压电式等。
为了提高加速度计的测量精度和稳定性,需要研究新型的加速度计制造技术和材料,以及优化其电路设计和信号处理算法。
三、算法技术研究1. 姿态解算算法姿态解算算法是SINS的核心算法之一,其目的是通过陀螺仪和加速度计的测量数据,计算出物体的姿态信息。
目前常用的姿态解算算法包括欧拉角法、四元数法和卡尔曼滤波法等。
为了提高算法的精度和实时性,需要研究新型的姿态解算算法,如基于机器学习的姿态解算方法等。
2. 误差补偿算法由于传感器自身的误差和外部环境的影响,SINS在运行过程中会产生误差。
为了减小误差对系统性能的影响,需要研究误差补偿算法。
目前常用的误差补偿算法包括基于模型的方法和基于数据的自适应补偿方法等。
研究新型的误差补偿算法和技术手段是提高SINS性能的重要方向。
四、系统集成技术研究1. 数据融合技术数据融合技术是将来自不同传感器的数据信息融合起来,以提高导航系统的整体性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2004年第18卷第3期测试技术学报V o l.18 N o.3 2004 (总第49期)JOURNAL OF TEST AND M EASURE M ENT TECHNOLOG Y(Sum N o.49)文章编号:167127449(2004)0320269205无陀螺捷联惯导系统综述Ξ曹咏弘,祖 静,林祖森(华北工学院测试技术研究所,山西太原030051)摘 要: 结合国内外的文献资料,对无陀螺捷联惯导系统的研究进行了总结,重点讨论了无陀螺捷联惯导系统中的两个重要问题,即加速度配置方式和角速度解算方法,简要分析了无陀螺捷联惯导系统的误差和精度问题.最后对无陀螺捷联惯导系统的未来研究方向进行了展望.关键词: 无陀螺捷联惯导系统;加速度计配置方式;角速度中图分类号: V249.32+2 文献标识码:ARev iew of the Gyroscope Free Strap-D ownI nerti al Nav igation SystemCAO Yong2hong,Z U J ing,L I N Zu2sen(Institute of T est T echno logy,N o rth Ch ina Institute of T echno logy,T aiyuan030051,Ch ina) Abstract: Com b in ing the dom estic and in ternati onal docum en t m aterials,the study on GFS I N S is summ arized in th is paper.Tw o i m po rtan t p rob lem s of GFS I N S are discu ssed especially,nam ely the accelerom eter allocati on schem e and angu lar velocity calcu lative m ethod,and the erro r and p recisi on questi on of GFS I N S is b riefly analysed.In the end,the fu tu re research on GFS I N S is discu ssed.Key words:the gyro scope free strap2dow n inertial navigati on system l;accelerom eter allocati on schem e;angu lar velocity用加速度计代替陀螺仪,并且从加速度计量测的比力中解算出载体的角速度,进而只用加速度计来组成捷联惯导的测量组合,称为无陀螺捷联惯导系统(T he Gyro scope F ree Strap2dow n Inertial N avigati on System简称GFS I N S).目前的研究发现无陀螺捷联惯导系统适用于大动态范围、导航时间较短的载体的惯性制导,其优点是低成本、低功耗、长寿命、高可靠性、抗高过载等.随着新型高精度加速度计的出现和滤波技术的发展,可达到较高的导航精度.目前,GFS I N S研究引起了很大的重视,成为一个研究热点.1 无陀螺捷联惯导系统的研究现状早在1962年,V icto r B.Co rey简单地论述了采用线加速度计测量角加速度的原理,提出了一种加速度计的简单编排方式[1],在1965年,V.K rishnan论述了通过安装在以稳定速度旋转的圆盘上的线性加速度计测量载体角速度和线加速度方法的数学原理[2],随后A lfred R.Schu ler在1967年提出利用线加速度计测量物体的旋转运动的想法,并提出了多种加速度计的配置方式[3],1975年A.J.Padgaonkar等人提出了一种采用9加速度计的力学编排方式计算载体角加速度和线加速度的方法[4],1982年,Shm uel J.Ξ收稿日期:2003211218 基金项目:山西省青年科技研究基金项目(20031026) 作者简介:曹咏弘(1972-),男,讲师,博士生,主要从事飞行体姿态解算方法研究.M erhav 在前人的基础上进一步研究了借助于旋转或振动加速度计三元组组成无陀螺的惯性测量组件,论述了从加速度计的输出信号中分离线加速度和角速度的方法[5].1991年,A lgrain 断言最少需要6个加速度计即可测量物体的线加速度和角加速度[6].1994年,Chen 发表了一种使用6个加速度计进行测量的新颖设计[7].1999年,L ee 在Chen 的基础上给出了利用6个加速度计测量物体旋转运动的解法[8].2001年,Ch in 2W oo 给出了一个决定加速度计配置方式是否可行的充分条件[9].2002年,L ee 又对其滤波算法进行了改进[10].国内关于无陀螺捷联惯导系统的研究报道最早见于1997年哈尔滨工程大学的马澍田等人的文章[11],目前有少数几所高校进行此方向的进行了理论探索,还没有应用方面的报道.1.1 依据的力学原理定义惯性坐标系O i xy z (i 系)和动坐标系O b x b y b z b (b 系),P 为一动点,则动点P 相对与O xy z 的加图1 坐标系间转换示意图F ig .1 Configurati on of transfo r m ati on betw een the coo rdinates速度为a =(r β)i +(L β)b +Ξα×L +Ξ×(Ξ×L )+2Ξ×(L α)b . 若P 点固定,则L 相对动坐标系O b x b y b z b 为一不变量,可得(L β)b 和(L α)b 项为零.因此,方程变为a =(r β)i +Ξα×L +Ξ×(Ξ×L ).所以,敏感方向为Χ,位于P 点处,固定安装的加速度计的输出f =[(r β)i +Ξα×L +Ξ×(Ξ×L )] Χ. 将i 系换成地球中心惯性坐标系,b 系换成弹体坐标系,可得比力方程为f b =V αb en ×Ξαb nb ×L b +Ξb nb ×(Ξb nb ×L b )+2(Ξb ie +Ξb en )×(V b ie +Ξb en ×L b )+g b + b ,式中:e 表示地球坐标系O e x e y e z e ;n 表示导航坐标系O n x n y n z n .1.2 加速度计的配置方式及角速度解算方法1)6加速度计组合[12~14]图2(a ),图2(b )两种配置方式适合于细长圆柱体的载体,两种配置方式在原理上是一样的,但杆图2 6加速度计安装示意图F ig .2 Configurati on of installati on of six accelerom eters072测试技术学报2004年第3期臂效应不同,因而同样大小的加速度计误差反映在角加速度计算值上是不同的.图2(c )配置方式同样适合于细长圆柱体的载体,加速度计敏感轴沿每个面对角线方向,当平行6面体的边长相同时,即加速度计在正方体每个面的中心安装,就是文献[7]给出的情形,此配置方式适合于卫星等近似于球体或正方体的载体.图2(d )是6加速度计在载体上的三棱柱配置方式,与其他的无陀螺捷联惯导加速度计配置方式相比,具有安装灵活的特点.可以依据不同载体的具体情况调节三棱柱的长度.6加速度计安装方式的角速度解算方法,由加速度计输出的比力中解出载体角加速度,经积分得到角速度,称这种方法为微积分法,但载体角速度的计算值的误差随时间的增长而积累,从而使导航误差随时间增长而加大,配合有效的滤波方法,可以一定程度上提高解算精度.6加速度计方式的精度虽然低一些,但系统的造价也降低了,适用于短程反战术弹道导弹等短时间导航的应用.2)9加速度计组合[13,15,16]9加速度计配置图是目前研究最多的一种方式,其中图3(a )由于加速度计的测量误差,造成较大的载体角加速度误差,致使解算出的载体角速度的误差随时间增长积累较快,而图3(b )的载体角速度计算值的误差有界,因而图3(b )优于图3(a ).图3(c )是王劲松等提出的一种新的配置图,此方式充分利用加速度计输出的冗余信息进行解算,有效地抑制了迭代误差.图3(d )是惯性测量单元沿单轴相对载体旋转,为达到相同导航精度,惯性测量单元相对载体旋转方式可大大降低对加速度计精度的要求,约3个数量级.图3 9加速度计安装示意图F ig .3 Configurati on of installati on of nine accelerom eters图3(a )的角速度解算方法类似于6加速度计,因而存在同样的问题;图3(b ),图3(c )的角速度解算方法,由加速度计给出的比力直接解其出载体角加速度和角速度的绝对值,将角加速度进行积分,得到的角速度的符号作为上述角速度的计算绝对值的符号,这样得到载体角速度,其误差是有界的,有效地抑制了导航误差,称这种方法为代数法;图3(d ).9加速度计方式虽然比6加速度计安装方式多了3个加速度计,成本较高,但同时多了一些冗余信息,为提高系统精度创造了条件.3)10加速度计组合[17]10加速度计组合(如图4所示)是北京理工大学的熊永虎在9加速度计的基础上,为了解决弹道修正引信问题而设计的方式,此测量组合方式适用于具有以下特征的惯性测量:①载体的质心位置随时间变化;②惯性测量装置不能安装在载体质心附近或需要安装在远离载体质心的位置上.172(总第49期)无陀螺捷联惯导系统综述(曹咏弘等)4)单陀螺多加速度计组合[18]用7个加速度计和一个陀螺仪的组合方式(如图5所示),从其角速度的解算方案看,仍然属于无陀螺捷联惯导系统问题.其角速度解算方法类似于6加速度计方式,是发散的,增加的陀螺仪提供了一个方向较为准确的角速度,从而克服了由单纯的无陀螺捷联惯导系统所解算出的角速度随时间发散的问题,提高了精度,但降低了系统抗过载的能力.综合以上各种方式,可以看出,合理安装加速度计可有效提高载体角速度计算精度.1.3 无陀螺捷联惯导系统的误差分析无陀螺捷联惯导系统的误差源主要有近似数学模型引起的误差;惯性敏感元件引起的误差;初始对准误差;捷联惯导系统的计算误差等.其中由于惯性敏感元件的误差即加速度计的误差影响最大,这可以和有陀螺系统作一个简单的比较:分析表明,有陀螺惯性导航系统由陀螺误差导致的系统误差能达到全部系统误差的90%以上,对无陀螺捷联惯导系统,角速度的解算以及导航任务的完成全部依靠加速度计,所以误差来源主要是加速度计的测量误差.在加速度计精度为10-6g 的假定下,对9加速度计的安装方案和单陀螺多加速度计的方案的系统误差进行分析.9加速度计和单陀螺多加速度计方案计算误差曲线如图6所示,可以看到代数法对于提高精度是明显的,而单陀螺方案,由于陀螺提供了较高精度的角速度值,从而也提高了解算精度.由于6加速度计安装方案的计算误差很大,这里没有给出误差曲线.2 需要进一步研究的问题①高精度加速度的研制.由误差分析可知无陀螺捷联惯导系统的误差来源主要是加速度计的误差,所以开发研制高精度的加速度计势在必行.②加速度配置方式.无陀螺捷联惯导系统与加速度计的安装位置和敏感方向是密切相关的.现有的各种加速度计配置方式都存在着误差积累较快,装配要求严格等缺点,所以一个合理、优化的加速度计配置方式是解决无陀螺捷联惯导系统各种问题的关键.③高精度的角速度解算方法.对于无陀螺捷联惯导系统,角速度解算[19,20]是至关重要的一步,角速度解算的精度直接影响到据此信息而进行的捷联姿态算法,从而影响到系统的导航精度.目前的角速度解算方法的误272测试技术学报2004年第3期差是随时间t 的增长而积累的,因而限制了无陀螺捷联惯导系统的应用范围,只能适用于航行时间较短、角速度变化范围较大的载体的惯性导航.所以研究出一套误差随时间积累缓慢或不随时间积累的高精度的角速度解算方法是将来研究的重点.④更好的滤波方法.为了提高导航精度,减小误差积累以及加速度计漂移的影响,传统的滤波方法如卡尔曼滤波和最小二乘滤波方法已经不能满足要求,更多地采用改进型卡尔曼滤波、多分辨率滤波、鲁棒滤波等,如何提高导航误差的收敛速度,成为目前无陀螺捷联惯导系统算法中的一个重要问题.⑤组合导航系统的研究.由于目前无陀螺捷联惯导系统的导航精度只能达到中等精度,为了提高导航精度可引进其他导航信息进行纠正,有多种选择比如GPS 与无陀螺捷联惯导系统的组合导航,地磁传感器[21~24]与无陀螺捷联惯导系统的组合导航,其中与地磁传感器的组合具有安装方便,成本低,稳定,精度较高等优点,因而是一种有前途的组合导航方式.参考文献:[1] Co rey V B .M easuring A ngular A ccelerati on w ith L inear A ccelerati on [J ].Contro l Engineering ,1962,(2):79-80.[2] K rishnan V .M easurem ent of A ngular V elocity and L inear A ccelerati on U sing L inear A ccelerom eters [J ].Journal ofT he F rank lin Institute ,1965,280(4):307-315.[3] Schuler A R .M easuring Ro tati onalM o ti on w ith L inear A ccelerom eters [J ].IEEE T rans onA ES ,1967,3(3):465-472.[4] Padgaonkar A J ,K rieger K W ,K ing A I .M easurem ent of A ngular A ccelerati on of a R igid Body U sing L inear A cce 2lerom eters [J ].Journal of A pp lied M echanics ,1975,42(5):552-556.[5] M erhav S J .A N on 2gyro scop ic InertialM easurem ent U int [J ].Journal of Guidance and Contro l ,1982,5(3):227-235.[6] A lgrain M C .A ccelerom eter 2Based P latfo r m Stabilizati on [J ].SP IE A cquisiti on T rack ing and Po inting ,1991,1482:367-382.[7] Chen J H ,L ee S C ,D aniel B .Gyro scope F ree Strap 2dow n InertialM easurem ent U nit by Six L inear A ccelerom eters[J ].Journal of Guidance Contro l and D ynam ics ,1994,17(2):286-290.[8] L ee S C ,Cheng Y L .Innovative E sti m ati on M ethod w ith Ow n 2sh i p E sti m ato r fo r an A ll accelerom eter 2type InertialN avigati on System [J ].Internati onal J of System s Science ,1999,30(12):1259-1266.[9] T an C W ,Park S ,M o stov K ,et al .D esign of Gyro scope 2F ree N avigati on System s [A ].2001IEEE IntelligentT ranspo rtati on system s conference p roceedings 2O ak land (CA )[C ].U SA :caifo rnia ,2001.286-291.[10] L ee S C ,H uang Y C .Innovative esti m ati on m ethod w ith m easurem ent likelihood fo r all 2accelerom eter type inertialnavigati on system [J ].IEEE T rans .on A ES .2002,38(1):339-346.[11] 马澍田,陈世友,李艳梅,等.无陀螺捷联惯导系统[J ].航空学报,1997,18(4):484-488.[12] 史震.无陀螺捷联惯导系统中加速度计配置方式[J ].中国惯性技术学报,2002,10(1):15-19.[13] 马澍田,赵建伟.无陀螺捷联惯导系统加速度计安装方法研究[J ].战术导弹控制技术,1999,(1):29-36.[14] 尹德进.捷联惯导系统六加速度计配置方案研究[J ].中国惯性技术学报,2003,11(2):48-51.[15] 王劲松,王祈,孙圣和.无陀螺微惯性测量组合的优化算法研究[J ].哈尔滨工业大学学报,2002,34(5):632-635.[16] 陈世友,李春花.无陀螺捷联惯导系统捷联方案研究[J ].航空学报,1999,20(6):566-568.[17] 熊永虎,马宝华.弹道修正引信的无陀螺捷联惯性导航方法[J ].探测与控制学报,1999年,21(4):3-6.[18] 周百令.一种新型的单陀螺多加速度计捷联惯导系统[J ].中国惯性技术学报,2002,10(1):6-9.[19] 赵龙.无陀螺捷联惯导系统角速度解算精度的研究[J ].中国惯性技术学报,2001,9(1):12-19.[20] 赵龙.一种新的捷联矩阵更新算法在无陀螺捷联惯导系统中的应用[J ].中国惯性技术学报,2000,8(4):51-54.[21] 王广龙,祖静,张文栋,等.地磁场传感器及其在飞行体姿态测量中的应用[J ].北京理工大学学报,1999,19(3):361-364.[22] 黄涛.弹丸转速的传感器测量方法[J ].弹箭与制导学报,2002,22(4):69-74.[23] 陈智刚,王志军.运用地磁传感器对旋转弹进行程序控制[J ].华北工学院测试技术学报,2001,15(3):169-171.[24] 沈波,陈荷娟,王志兴,等.基于地磁传感器的计转数引信可行性研究[J ].探测与控制学报,2001,23(4):45-48.372(总第49期)无陀螺捷联惯导系统综述(曹咏弘等)。