基于ARM7处理器的CAN总线网络设计
CAN模块方案
CAN模块方案一、介绍CAN(Controller Area Network)是一种用于通信和控制的串行通信协议,广泛应用于汽车、工业控制等领域。
CAN模块方案是设计和实现CAN通信功能的方法和方案。
本文将介绍一个基于ARM微控制器的CAN模块方案。
二、硬件设计1. CAN芯片选择选择一款具有高性能和稳定性的CAN芯片非常重要。
在本方案中,我们选择了XXX型号的CAN芯片,它具有高速传输和广泛的工作温度范围,适用于各种环境。
2. 硬件连接将CAN芯片与ARM微控制器进行连接。
根据芯片的引脚定义,正确地连接CANH和CANL线路,同时连接供电和地线。
3. 外部电路在CAN通信中,还需要添加电阻电容来滤波和保护电路。
通过正确选择和布局这些元件,可以提高电路的性能和稳定性。
三、软件设计1. 编程语言选择在本方案中,我们选择了C语言来编写CAN通信的软件代码。
C语言是一种高效且广泛使用的编程语言,适用于嵌入式系统的开发。
2. 驱动程序编写CAN芯片的驱动程序是实现通信功能的关键。
通过调用CAN芯片的寄存器,配置和控制CAN通信参数,实现数据的发送和接收。
3. 数据传输CAN通信使用报文的方式进行数据的传输。
在软件设计中,需要定义数据帧结构,包括标识符、数据长度和数据内容等。
通过编写相应的函数,将数据封装成CAN报文,并发送到总线上。
四、测试与验证设计完成后,需要进行测试和验证,确保CAN模块的正常工作。
可以通过以下几个方面进行测试:1. 通信稳定性测试:在不同的工作环境下,长时间进行CAN通信,观察通信的稳定性和可靠性。
2. 数据传输测试:发送和接收不同类型和长度的数据,验证CAN模块的数据传输功能是否正常。
3. 性能测试:测试CAN模块的最大传输速率、带宽和处理能力,评估其性能是否符合设计要求。
五、总结在本文中,我们介绍了一个基于ARM微控制器的CAN模块方案。
通过正确的硬件设计和软件编程,实现了CAN通信的功能。
基于LPC2294的CAN总线主节点设计

基于LPC2294的CAN总线主节点设计黄培灿;赵维佺;黄荣舜;邹裕【期刊名称】《电子设计工程》【年(卷),期】2011(19)12【摘要】为引入CAN总线技术以实现运动控制系统的网络化,提出了基于LPC2294的CAN总线主节点的硬件及软件设计方案.硬件采用基于ARM7内核的微控制器LPC2294,使用CTM1050T作为CAN收发器,设计了带有CAN总线以及以太网接口的硬件电路,并进行了SRAM、NORFLASH与NANDFLASH的扩展.软件采用μCLinux作为操作系统,并开发了CAN控制器的驱动程序,实现了CAN总线的各种功能.通过制作样机并进行实验,验证了这一方案的有效性.%In order to introduce the CAN bus technology to realize networklization of motion control system. A hardware and software design of CAN bus master mode based on LPC2294 is proposed. Hardware adopts microcontroller LPC2294 based on AEM 7 kernel, using CTM1050T as CAN transceiver. This paper designs hardware circuit with interface of CAN bus and ethernet, and extends SRAM, NORFLASH, NANDFLASH. Software, which adopts μCLinux as operating system and develops the drivers of CAN controller, realizes several functions of CAN bus. Through making model machine and testing, it proves the validity of this design.【总页数】4页(P4-7)【作者】黄培灿;赵维佺;黄荣舜;邹裕【作者单位】东莞理工学院,广东东莞523808;东莞理工学院,广东东莞523808;东莞理工学院,广东东莞523808;东莞理工学院,广东东莞523808【正文语种】中文【中图分类】TP302.1【相关文献】1.基于CAN总线多主节点结构的自治水下机器人通信系统 [J], 张颖;张有志;方敏;朱大奇2.基于MC9S12XS256的汽车CAN总线主节点设计 [J], 杨小卫;杨世文3.基于LPC2294的CAN总线智能节点设计 [J], 王铁钢;王忠庆4.基于PC的CAN总线主节点监控程序的设计 [J], 刘寒5.基于LPC2294的CAN总线协议设计及实现 [J], 汤宏萍;薛根福因版权原因,仅展示原文概要,查看原文内容请购买。
MCP2515在ARM7的CAN口扩展中的应用

为缓 冲器满 中断 引脚 ,分 别用来 指示 有效 报 文载人
12 内部 结构 .
图 1 双 C N口 不 薏 图 A
添加 相 应 的线性 稳 压器 L 0 4S 33 M1 8 I一 .,把 l 电 2V 压转 变 成 33 。L 0 4S 33两端 接一 些 电容 , . V同 M1 8 I一 . 起 到滤 波和去耦 的作 用 。
MC 2 1 P 5 5的 两 个 引 脚 雨丽丽 和丽 丽 可 配 置
A M7平 台的 C N 总线 扩 展 中 的应 用 。具 有 两路 R A
制 器 ” 意思 。 A 的 C N属 于 总线式 串行 通信 网络 , 与一 般 的通 信 总线 相 比 ,A C N总线 的数 据 通 信具 有 可靠
性 、 时性 和灵 活性等 突 出的性 A,。本文 介绍 了一 实 日口 l t - - 种 新 型 的 C N 通 信 控 制 器 MC 2 1 ,给 出 其 在 A P 55
h r wa es se o ae l eful r a p a a c . a d r y tm fs t l t a t e p e r n e i
Ke r : y wo ds ARM 7; CP2 5 CAN M 51 ; BUS S 5HVD2 0 ; N6 3
C N( o t l r raN tok) 即 “ 域 网控 A , nr l e e r , C oeA w 局
星故障 复现嵌入 式硬 件 系统 中 。
关 键词 : R 7M P 5 ;A A M ; C 2 1 C N总线 ; N 5 V 2 0 5 S 6 H D 3
中图分类 号 : 5 4 3 V 2.
文献标 识码 : A
The M CP2 1 5 5 App ia i n n CAN lc to i BUS Ex n i n fARM 7 pa so o
CAN总线网络设计

1 引言can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。
由于can总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。
本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
2 系统总体方案设计整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。
上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。
上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。
传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。
本设计can总线传输介质采用双绞线。
图 1 can总线网络系统结构3 can总线智能网络节点硬件设计本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。
该智能节点的电路原理图如图2所示。
该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
图2 can总线智能网络点3.1 lpc2119处理器特点lpc2119是philips公司推出的一款高性价比很处理器。
基于ARM技术的CAN总线和以太网间的互联设计_沈跃
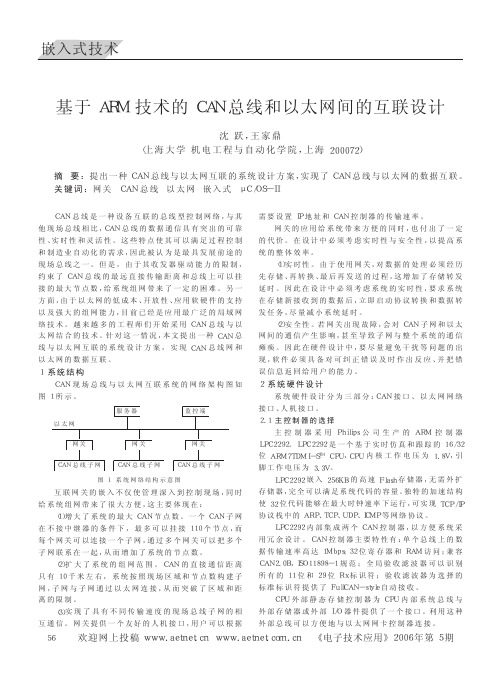
服务器以太网网关CAN总线子网网关CAN总线子网网关CAN总线子网监控端图1系统网络结构示意图CAN总线是一种设备互联的总线型控制网络,与其他现场总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。
这些特点使其可以满足过程控制和制造业自动化的需求,因此被认为是最具发展前途的现场总线之一。
但是,由于其收发器驱动能力的限制,约束了CAN总线的最远直接传输距离和总线上可以挂接的最大节点数,给系统组网带来了一定的困难。
另一方面,由于以太网的低成本、开放性、应用软硬件的支持以及强大的组网能力,目前已经是应用最广泛的局域网络技术。
越来越多的工程师们开始采用CAN总线与以太网结合的技术。
针对这一情况,本文提出一种CAN总线与以太网互联的系统设计方案,实现CAN总线网和以太网的数据互联。
1系统结构CAN现场总线与以太网互联系统的网络架构图如图1所示。
互联网关的嵌入不仅使管理深入到控制现场,同时给系统组网带来了很大方便,这主要体现在:(1)增大了系统的最大CAN节点数。
一个CAN子网在不接中继器的条件下,最多可以挂接110个节点,而每个网关可以连接一个子网,通过多个网关可以把多个子网联系在一起,从而增加了系统的节点数。
(2)扩大了系统的组网范围。
CAN的直接通信距离只有10千米左右,系统按照现场区域和节点数构建子网,子网与子网通过以太网连接,从而突破了区域和距离的限制。
(3)实现了具有不同传输速度的现场总线子网的相互通信。
网关提供一个友好的人机接口,用户可以根据需要设置IP地址和CAN控制器的传输速率。
网关的应用给系统带来方便的同时,也付出了一定的代价。
在设计中必须考虑实时性与安全性,以提高系统的整体效率。
(1)实时性。
由于使用网关,对数据的处理必须经历先存储、再转换、最后再发送的过程,这增加了存储转发延时。
因此在设计中必须考虑系统的实时性,要求系统在存储新接收到的数据后,立即启动协议转换和数据转发任务,尽量减小系统延时。
基于CAN总线的多路温度采集系统的设计--主机硬件
基于CAN总线的多路温度采集系统的设计学生姓名:朱广东指导教师:黄震梁浙江树人大学信息科技学院电子信息工程114班摘要以嵌入式处理器为核心,总结CAN总线通信技术,设计一套由一个主机,两个从机组成了温度采集的系统,两个从机使用Pt100温度传感器来采集各自部分的温度值,通过CAN 总线将两个从机的温度数据传输给主机,主机接收到从机数据,并将各个从机的温度值显示在LCD液晶屏上。
关键词:温度采集;ARM7;CAN总线;1引言1.1CAN总线研究背景与意义在现代化的工业生产中,温度是极为普遍又极为重要的热工参数之一。
例如:在冶金工业、化工生产、电力工程、造纸行业、机械制造和食品加工等诸多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。
温度控制不好就可能引起生产安全,产品质量和产量等一系列问题。
尽管温度控制很重要,但是要控制好温度常常会遇到意想不到的困难.采用CAN总线对温度迸行控制,不仅具有控制方便、组态简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而能够大大提高产品的质量和数量。
控制器局部网(CAN—CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能,现己广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线从形成并应用于汽车工业至今,其突出的特点和优异的性能使它的应用范围不断的扩大。
目前在机械工业、纺织工业、机器人、医疗器械、传感器、智能小区管理和家用电器等领域都得到了应用和发展。
而且CAN也是目前为止唯一具有国际标准的现场总线,因此CAN具有广阔的前景。
CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。
概括起来有下列一些突出的特点:1.CAN总线为多主工作方式,网络上任一节点均可在任意时刻主动地向网络上其它节点发送信息,而不是传统的主从方式。
can总线电路设计
can总线电路设计摘要:1.CAN 总线电路设计概述2.CAN 总线电路的组成部分3.CAN 总线电路的设计流程4.CAN 总线电路的常见问题及解决方法5.总结正文:一、CAN 总线电路设计概述CAN 总线(Controller Area Network)是一种常用于车辆和工业控制领域的通信协议,其主要特点是多主控制器、高可靠性、实时性、高抗干扰能力和低成本。
CAN 总线电路设计是指在硬件层面实现CAN 总线通信的过程,主要包括CAN 控制器、CAN 总线驱动器、CAN 总线收发器等组成部分。
二、CAN 总线电路的组成部分1.CAN 控制器:CAN 控制器是CAN 总线电路的核心部分,负责处理CAN 总线通信的逻辑和数据传输。
常见的CAN 控制器有Microchip 的MCP2510、STMicroelectronics 的STM32 等。
2.CAN 总线驱动器:CAN 总线驱动器负责将CAN 控制器输出的信号转换为适合在总线上传输的信号,同时也能将总线上的信号转换为CAN 控制器能识别的信号。
常见的CAN 总线驱动器有TJA1020、MCP2003 等。
3.CAN 总线收发器:CAN 总线收发器负责处理CAN 总线上的物理层通信,包括信号的放大、整形、滤波等功能。
常见的CAN 总线收发器有MCP2020、TJA1021 等。
三、CAN 总线电路的设计流程1.确定设计需求:根据实际应用需求,确定CAN 总线通信的节点数量、通信速率、传输距离等参数。
2.选择合适的CAN 控制器、驱动器和收发器:根据设计需求,选择性能、接口、封装等满足需求的CAN 控制器、驱动器和收发器。
3.电路设计:设计CAN 总线电路的电源、时钟、接地等部分,同时根据CAN 控制器、驱动器和收发器的接口,设计相应的连接线路。
4.程序设计:编写CAN 总线通信的软件程序,包括初始化CAN 控制器、发送和接收数据、错误检测和处理等功能。
ARM处理器在CAN连接设备内大行其道

ARM处理器在CAN连接设备内大行其道——CANopen支持ARM基于内核的微控制器CAN最初被设计为汽车内的网络协议,已演变成为一项标准。
在几个市场包括工厂自动化、工业机床控制、医疗设备、海事电子以其它嵌入控制系统内得到广泛应用。
在这些中小容量市场,还有标准化的基于CAN的更高层协议。
例如,DeviceNet被北美充分接纳为工厂自动化标准,CANopen在许多嵌入控制系统内被采纳为应用层协议。
事实上,CANopen应用层是嵌入网络应用的国际标准协议。
CANopen规范家族还定义了设备和应用情况。
应用层描述了通信服务和协议,并指定了交换数据的内容。
一方面CANopen规范标准化了通信,另一方面提供了足够的灵活性,以满足应用领域大量选择的要求。
两大公司提供CANopen支持(Vector Informatik和Port)。
它们提供面向C-CAN模块的CANopen源代码,在基于ARM内核的微控制器上实现。
其它CANopen源代码提供商(Ixxat Automation和Sys Tec)将按需提供支持。
CAN模块用VHDL描述为RTL级,为综合作准备。
C_CAN兼容于ISO 11898-1并支持11位和29位标识符(Identifier)。
比特率可依据所使用的技术被编程至高达1Mbps的值。
要连接物理层还需额外的收发器硬件。
为实现CAN网络上通信,配置了单独的信息对象(Message Objects)。
信息对象和Identifier Masks(标识符掩膜)被存储在Message RAM(信息RAM)内。
所有与信息处理有关的功能都在Message Handler(信息处理器)内实现。
这些功能是接收滤波、CAN内核及信息RAM之间的传递、发射要求的处理和模块中断的生成。
有控制并配置CAN内核及信息处理器的寄存器,其它用于存取信息RAM。
CAN模块提供面向定时触发CAN(TTCAN)应用的Disable Automatic Retransmission(非使能自动重发)模式。
基于CAN总线的车辆控制系统中分控制盒设计

基于CAN总线的车辆控制系统中分控制盒设计
陈东
【期刊名称】《电子科技》
【年(卷),期】2008(21)6
【摘要】针对传统车辆分布式控制系统中电子线束日趋肥大化的问题,文中提出了将多路通信技术CAN应用于汽车电气控制系统的新方案.该方案以CAN总线为通信媒介,利用ARM7的强大处理能力,使汽车电控系统的控制能力得到增强.文中主要介绍新方案中分控制盒的设计.实践表明,该分控制盒具有较强的处理能力和控制能力.解决了电子线束的复杂性问题,实现了各电控单元信息共享,提高了汽车电气控制系统性能.
【总页数】4页(P22-25)
【作者】陈东
【作者单位】西安邮电学院,电子与信息工程系,陕西,西安,710121
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于CAN总线的车辆控制系统设计与实现 [J], 姚竹亭;吴立新;潘宏侠;刘燕军;张雄
2.基于CAN总线的车辆分布式系统中主控制盒的设计 [J], 陈东
3.基于CAN总线的座舱操纵控制盒通信系统设计 [J], 武琳; 谭磊; 曾行; 张弛
4.基于CAN总线的座舱操纵控制盒通信系统设计 [J], 武琳; 谭磊; 曾行; 张弛
5.基于CAN总线电气综合控制盒Bootloader软件的设计与实现 [J], 李鑫;李艳明;王志远;倪永亮
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LPC2368的以太网与CAN总线互联网关的设计
步 提 高 以太 网一 A 总 线 互 联 网 关 的 抗 干 扰 能 力 ,保 证 它 与 C N
11微 控 制 器 的 选择 . 微 控 制器 是 以太 网一 AN总 线互 联 网 关 的核 心 ,对 C C AN控
C N 总 线上 其 他 节 点 在 电 气 上 是 完全 隔离 和 独 立 ,P 2 6 A L C 3 8的
C N 总线 作 为 一种 底 层 的 现 场 网 络 , 要 应 用 于 企 业 下 层 A 主 车 间 和 生产 现 场 , 企 业 管 理 层 大 多 采 用 以太 网 , 而 因此 必 须 将 现 场 总线 测 控 网络 通 过 互联 网关 与 以太 网 相连 并 接 入 因特 网 以满 足 这种 上 下 层 沟 通 的需 求 , 文 提 出 了 一种 以太 网与 C N 总 线 本 A 互 联 网关 的设 计 方 案 , 实 现 了 以 太 网 ( 并 企业 管理 层 ) C 与 AN总 线 ( 层 车 间 和 生产 现 场 ) 下 的互 联 。
关键 词 : 太 网 , 场 总 线 , 以 现 互联 网关 , P 3 8 L C2 6
Ab t t s  ̄c
P t or r te u f wa d h Gaeway t de i o E h n t sgn f t ere —CAN wht b e o ARM 7 sigl i ch as d n n e-c i LP 3 G ien he y t hp C2 68. v t s sem h d— ar wa e r m e a a , ogr r fa digr m pr am d i oi h CAN c esgn t e om mu c in、 t e n t niat o E h r e co m u ia i a d m nc t on n Eter t h ne -CAN pr o ol on otc c — v so G aewa Desgn smpl ls f ei e an i de c , in tu ur hgh el it d erin. t y i ed a i e, s or gn xp son e viesr o als rct e,i r i ly an wa s t l ors at ab i s ui e f ome ab idu t s en r l e co e t o E h n n CAN n s r c e, i nn c i y ea z on f t ereta d Key wors:t eret i b ,on e in d E h n ,ed usc n ct ga e yLP 3 f o t wa , C2 68
基于ARM的CAN网络打印服务器设计

图 1 J 络 打 印 系统 结 构 _ 碉
公 司 的 L C 19 P 2 2 P 2 2 。L C 19是一 款支 持 实 时仿 真 和
跟踪 的 1/2位 A 63 RM7 D — P “ 控制 器 ” 带 T MISC U 微 .
81 /2位 访 问 的静态 R M,2 /63 A 18位宽 度 的存储 器 接
络 打 印服 务器采 用 C N总 线作 为 数据 通讯 网络 。 A 每
个 网络 打 印服 务器 可 与几 十 甚 至 上 百 个 智 能 电 子
口和独 特 的加 速 结 构 ,可 使 3 2位 代 码 在最 大 时 钟 速 率 下运 行 。而 对 代码 有严 格控 制要 求 的应用 则 可 使用 l 6位 T u 模 式 。 P 2 2 h mb L C 1 9采用 6 4引脚 封装 , 低 功耗 ,内带 有 4 6个 G I 2 3 PO, 个 2位定 时 器 , 2路 C N控 制器 , A 多路 串行 接 口, 9路外 部 巾断 。选 取该 处 理 器 主 要 考 虑 其 内 部 资 源 丰 富 。无 需 扩 展 存 储
线, 具有 高可 靠性 、 时性 和 灵 活性 。 实 广泛 应 用 于汽
车控 制 、 业 控制 、 器人 、 用 电 器等 领 域 。C N 工 机 家 A 总线 已成 为工业 现 场首 选现 场 总线 之一 。设计 的 网
有 2 6K 5 B的 嵌人 式 高 速 Fah存储 器 ,6K l s 1 B支 持
ARM7 L C2 2 P 1 9的 网 络 打 印 服 务 器 软 硬 件 设 计 。
关
键
词 : A 总线 : 网络 打 印服务 器 ; 智 能 电子设 备 ; L C 19 C N P 2 2
基于ARM7的电梯轿顶CAN通讯模块的设计与实现

电梯 运行 速度
电梯显 示楼 层
每层 中心 高度为 : : + ) 当 ( d 2 /
l
时,楼层 为 1 当 h < : l
2 ,楼层为 时
各 层 分 区 的 距 离 为 : 2 :依 次类推 ,当 h < a
=
nl + 时,楼层 为 。
( + / + 32
轿 厢 乘客数 量
、
引 言
电梯传 统 的通 讯方 式一般采 用 P C上 的 I 口进 行并 行通讯 ,但通 讯可靠 性差 ,造成 故障 多、停梯 L / O
时间长;且当楼层数增加时,要求 P C的 I 口数相应增加,导致成本的大幅提高 ,也提高了安装和维 L / O
护 的难度 ,并 且 电梯 产 品通 用性不 强 。而 C N 总线 是具有 通信速 率 高、容易实现 、且性 价 比高 等诸 多优 A 点 , 已形 成国 际标 准 的现 场 总线 。…另外 A M7芯片 L C 19是基 于一个 支持 实时仿 真和跟 踪 1 /2位 R P 21 63
特别 适用 于工业控 制应 用 以及 容错 维护总线 等应用 。运用 L C 19和 C N 总线组 成 电梯 桥顶通 讯模块 , P 21 A
可成 功实现 与上位 机和 电梯 主控系统 的 可靠 通讯 。I , 24 ,] 3
二 、电梯轿顶 控制 系统硬 件设计 1电梯运 行参数 的 设计 原理 .
负载p03负载p02负载p030前门开关门到位p020前门关门到位p019前门安全触板光幕信号p024后门开门到位p018后门关门到位po17后门安全触板光幕信号p014备用输入l前门机故障p015备用输入2后ij机故障p016备用输入3前门光幕p010备用输入4后门光幕pi16输出信号为开门指令输出p116关门指令输出p09轿项检修p07轿顶上行p06轿顶下行p05上门区信号p011下门区信号p04
can总线电路设计
can总线电路设计
CAN(Controller Area Network)总线是一种广泛应用于实时控制系统的串行通信协议,常用于汽车、工业控制等领域。
CAN总线电路设计通常包括以下关键元素:
1. CAN 控制器: CAN 控制器是主要的处理单元,负责管理数据的传输、接收和处理。
这可以是一个专用的芯片或者集成在微控制器中。
2. CAN 收发器:CAN 收发器用于将数字信号转换为CAN总线所需的电压水平。
它能够将来自控制器的数字信号转换为差分信号,以便在CAN总线上传输。
同样,它还能将接收到的CAN总线上的差分信号转换为数字信号。
3. 电源管理: CAN总线电路需要适当的电源管理,确保各个部分都能得到合适的电源电压和电流。
4. 保护电路:由于CAN总线常常用于汽车等工业环境,总线电路设计通常包括保护电路,防止由于电压浪涌、静电放电等原因引起的损坏。
5. 时钟源: CAN总线需要一个准确的时钟源,确保数据的同步和正确的时间标记。
6. 连接器和电缆: CAN总线电路设计需要考虑连接器和电缆的选择,以确保可靠的物理连接和适当的电气性能。
7. 软件协议栈:在CAN总线电路中,除了硬件设计,还需要实现CAN通信的软件协议栈,包括CAN消息的发送和接收、错误处理等功能。
8. EMC(电磁兼容性)设计:由于CAN总线常常在工业环境中使用,电磁干扰是一个重要的考虑因素。
因此,设计中需要考虑电磁兼容性,采取措施以减小电磁辐射和提高抗干扰能力。
总的来说,CAN总线电路设计是一个综合性的工程,需要考虑硬件和软件之间的协同工作,以确保可靠、高效的数据通信。
ARM7处理器NUC710ADN扩充双网口设计

朱 开建
( 深圳市拓邦 自动化技术有限公 司, 广 东 深圳 5 1 8 0 0 0 )
摘 要
在 AR M7处 理 器 NU C 7 1 0 A D N 的 第 一 个 网 口的 基 础 上 , 利 用 网 口驱 动 芯 片 D M9 0 0 0 A E P扩 充 了第 二 个 网 口, 使 系统
《 工业控制计算机} 2 0 1 4年第 2 7卷 第 5期
A R M7 处理器 N U C 7 1 0 A D N扩充双网口设计
De s i g n o f ARM7 P r o c e s s o r NUC71 0 ADN E x t e n de d Du a l Ne t wo r k
c an b e n or m al an d r el i abl e wor k, ach i ev e s t h e ARM 7 pr oc es s o r f or n et wo r k c omm u ni ca t i o n f u nc t i o n.
Ke y wor d e: NUC71 0 ADN. DM 9 00 0 AEP, ARM pr oc es s o r , ne t wor k dr i v er ch i p, n e t wor k p or t dr i ve r t r an s pl a n t a t i on , i  ̄ Cl i nu x
1 芯 片 介 绍
3 ) 片选信号 , 用 N U C7 1 0 AD N的 n E C S 2 。 程序初始化时 , 把
n E CS 2初 始 化 为启 始 地 址 0 X 8 C 0 0 , 0 0 0 0 H, 这样 D M9 0 0 0 A E P
基于ARM7的MVB_CAN网关设计

对 于 现在 的机 车总线 通 信 ,MVB 线 主要 应 总
用在单 台机 车 内 的车载 设 备间 的通 讯 .而C N总 A 线 则 用 于 车 载 设 备 内部 模 块 间 的 数 据 通 讯 。 因 此 ,实 现C N总线 与MV 总线 之 间 的通 信就 成 为 A B 工 程实践 中一个 必 须解决 的 问题 。
可实 现车辆 间 的数据 通信 ;第 二 级是 MV ( 1 B Mu.
tu ci hceb s i n t nVe i u)多 功 能 车 辆 总 线 .主要 实 f o l
现 同一 个车 辆 内各个 功 能控制 单 元之 间 的数 据通 信。 多 功 能 车辆 总 线 f B MV )是 主 要 用 于 有互 操
的循 环 冗余 检 查 fR ) A C C 。C N的标 准 帧格 式 如 图
I 示。 所
的 一种 多主机 局部 网。 由于该 网 的卓越 性 能 ,现
已广 泛应 用 于工业 自动 化 、多种 控制 设 备 、交 通 工 具 、医 疗 仪 器 以及 建 筑 、环 境 控 制 等 众 多 领
及 可管理 性 等多 方面 的优 势而 广泛 的应 用 在列 车
个保 留位 ,以便 为将 来扩 展 使用 。它 的最后 四个 字 节用 来 指 明数据 场 中数 据 的长 度 ( L 1 D C 。数 据
场 范 围为0 8个 字节 ,其 后 有 一个 检测 数 据 错误 ~
总线 控制 当 中。 控 制 器 局 部 网 (A C N R L E R A C N— O T O L R A E N T R )是 B S H公 司为 现 代 汽 车 应 用 推 出 E WO K OC
定 出新 的列 车 通 信 网路 国 际标 准T N ( 车 通信 C 机
基于ARM7处理器LPC2119的USB-CAN转换器设计

基于ARM7处理器LPC2119的USB-CAN 转换器设计作者:高敏来源:《现代电子技术》2010年第22期摘要:叙述一种使用ARM7处理器实现USB接口与CAN总线的方案,通过其可以在PC实现对CAN总线上设备的监控。
系统的主控制器为NXP公司的ARM处理器LPC2119,内部集成两路独立的CAN控制器。
USB接口采用沁恒电子的CH375。
描述了USB-CAN通信接口工作的基本原理及CAN总线与USB之间的硬件接口电路。
同时,分析了固件编程及使用通用I/O模拟并口读写时序方法。
关键词:CAN总线; USB; LPC2119; CH375中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2010)22-0142-03Design of USB-CAN Converter Based on LPC2119 of ARM7 ProcessorGAO Min(Department of Applied Electronics, Jiangsu Nantong Commercial Vocational College, Nantong 226007, China)Abstract: A scheme of using ARM7 processor to realize the USB interface and CAN bus is introduced, which can monitor the devices of CAN bus on PC. The system's main controller is ARM processor LPC2119 produced by NXP, which integrated two independent CAN controllers. USB interface circuit adopts QinHeng Electronics CH375. The basic principles about the USB-CAN communication interface and the hardware interface circuit between CAN and USB are described. At the same time, the method of the firmware programming and the use of general-purpose I/O port to simulate parallel read /write timing are analyzed.Keywords: CAN Bus; USB; LPC2119; CH3750 引言控制器局域网(controller area network,CAN)是世纪年代德国BOSCH公司为现代汽车应用而推出的一种多主机局部网,由于CAN总线具有可靠性高、功能完善、成本合理、实时性等优点,CAN总线早已不再局限于汽车行业,而被广泛应用于各个自动化控制系统中,例如汽车电子、工业控制、智能大厦、安防监控、环境控制等。
CAN-bus现场总线基础教程【第7章】CAN总线应用层协议(DeviceNet)-DeviceNet传感器从站设备的开发(29)
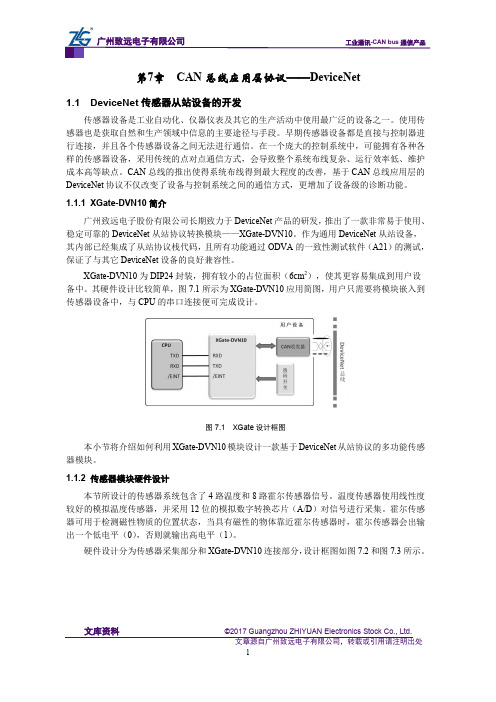
文库资料 ©2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.第7章 CAN 总线应用层协议——DeviceNet1.1 DeviceNet 传感器从站设备的开发传感器设备是工业自动化、仪器仪表及其它的生产活动中使用最广泛的设备之一。
使用传感器也是获取自然和生产领域中信息的主要途径与手段。
早期传感器设备都是直接与控制器进行连接,并且各个传感器设备之间无法进行通信。
在一个庞大的控制系统中,可能拥有各种各样的传感器设备,采用传统的点对点通信方式,会导致整个系统布线复杂、运行效率低、维护成本高等缺点。
CAN 总线的推出使得系统布线得到最大程度的改善,基于CAN 总线应用层的DeviceNet协议不仅改变了设备与控制系统之间的通信方式,更增加了设备级的诊断功能。
1.1.1 XGate-DVN10简介广州致远电子股份有限公司长期致力于DeviceNet 产品的研发,推出了一款非常易于使用、稳定可靠的DeviceNet 从站协议转换模块——XGate-DVN10。
作为通用DeviceNet 从站设备,其内部已经集成了从站协议栈代码,且所有功能通过ODVA 的一致性测试软件(A21)的测试,保证了与其它DeviceNet 设备的良好兼容性。
XGate-DVN10为DIP24封装,拥有较小的占位面积(6cm 2),使其更容易集成到用户设备中。
其硬件设计比较简单,图7.1所示为XGate-DVN10应用简图,用户只需要将模块嵌入到传感器设备中,与CPU 的串口连接便可完成设计。
图7.1 XGate 设计框图本小节将介绍如何利用XGate-DVN10模块设计一款基于DeviceNet 从站协议的多功能传感器模块。
1.1.2 传感器模块硬件设计本节所设计的传感器系统包含了4路温度和8路霍尔传感器信号。
温度传感器使用线性度较好的模拟温度传感器,并采用12位的模拟数字转换芯片(A/D )对信号进行采集。
基于ARM处理器的网关通信模块研制

龙源期刊网
基于ARM处理器的网关通信模块研制
作者:罗林贺盛文王强
来源:《现代电子技术》2012年第12期
摘要:为了满足机车车辆上具有CAN接口的设备方便接入机车车辆网络,采用ARM7内核芯片LPC2294,实现了MVB-CAN双向网关通信模块。
给出了ARM处理器LPC2294与CAN 总线、MVB通信芯片MVBC02芯片的硬件接口实现方法,做了相关可靠性测试和现场装车考核试验。
结果表明,网关模块完全可以满足设计要求,到达了实际设计效果,设计出的网关模块具有可靠性高,性价比高的特点
关键词:CAN总线;ARM;μC/OS-Ⅱ;MVB总线;TCN。
基于ARM7系列芯片的DCS从站CAN总线研究

以长 盛不衰 ,主要在于它的设计者为满足 其 应 用领 域 的 扩 展 而 不 遗 余 力 地 致 力 干 对 其高层协议技术的升级。目前 , 比较流行的
高层 协议 是 C ANo e p n和 D vcN t 它们 e i e, e
都 是 在物ቤተ መጻሕፍቲ ባይዱ理 层 和 数据 链路 层使 用 C AN总 线 的标 准 应 用 层 网络 协 议 。
cA 总 线 ;ARM7; 分布 式控 制 系 统 N
范涉及兼容性 的不同方面,比如 电气特性
和数 据转 换 的解释 。
2C N总 线数据 链路 层的 协议 结构 A
C AN 标 准 帧 信 息、 l 个字 节 ,包 括 为 1
引言
自上 世纪 8 年 代 C 0 AN 总 线 技 术 问 以来 ,它已有 2 0多年 的历史 。C AN 总线 技 术 因 为 其独 有的 优势 ,没 有随 着时 间的 推 进 和 信 息技 术的 高 速 发 展 而 被 淘 汰 ,相 反C AN的高层技术的发展 ,使得它在当今 诸 多 领域 的通 信 系统 中保 持 着 绝 对 的 垄 断 地位。 天 , 今 在欧 洲 几 乎每 一 辆 新 客车 均 装 配有C AN局 域 网 , AN已 经成 为 全球 范 围 C 内最 重 要 的总 线 之一 。C AN总 线 之所 以 可
T XD和 RXD。RS用 于选 择 高速 模 式 或 者 静 止 模 式 ,VCC提 供 5 的 电源 ,在设 计 V 中可 以 使 用 跳 线 儿 3,并 将 其 连接 ,保证 C ANH 和 C ANL之 间有 10欧 姆 的 电 阻 。 2 最 后 会输 出 C ANH和 C L两根 总 线 来控 AN 制 通 信 系统 。
can总线电路设计
can总线电路设计【最新版】目录1.CAN 总线的概述2.CAN 总线电路的设计要点3.CAN 总线电路的实际应用4.CAN 总线电路的优缺点分析5.总结正文一、CAN 总线的概述CAN 总线,全称为控制器局域网络(Controller Area Network),是一种用于实时控制的串行通信总线。
它最初由德国的 Robert Bosch GmbH 公司于 1980 年代开发,用于汽车电子设备的通信。
CAN 总线具有多主控制器、高可靠性、高速率、远距离传输以及多节点等特点,广泛应用于工业自动化、汽车电子、医疗设备等领域。
二、CAN 总线电路的设计要点1.选择合适的 CAN 控制器CAN 控制器是 CAN 总线电路的核心部件,选择合适的 CAN 控制器对于整个系统的稳定性和性能至关重要。
目前市场上有许多种 CAN 控制器可供选择,如德州仪器(TI)、飞思卡尔(Freescale)、NXP 等。
2.电路拓扑设计CAN 总线电路的拓扑设计有多种形式,如单主控制器、多主控制器、多节点等。
在设计过程中,需要根据实际应用需求选择合适的拓扑结构。
3.传输速率与距离CAN 总线的传输速率和距离是设计过程中需要考虑的重要因素。
根据实际应用场景选择合适的传输速率和距离,以保证通信的稳定性和可靠性。
4.电气特性CAN 总线电路的电气特性包括电源电压、信号电平、噪声抑制等。
合理的电气特性设计可以有效提高通信的可靠性。
5.抗干扰设计在 CAN 总线电路设计过程中,需要考虑抗干扰措施,如屏蔽、滤波、接地等,以降低外部干扰对通信的影响。
三、CAN 总线电路的实际应用CAN 总线电路在众多领域都有广泛应用,如汽车电子、工业自动化、机器人控制、智能家居等。
例如,在汽车电子领域,CAN 总线用于发动机控制、底盘控制、车身控制等多个子系统的通信。
四、CAN 总线电路的优缺点分析优点:1.多主控制器结构,系统可靠性高;2.远距离传输,适用于各种工业环境;3.高速率,满足实时控制需求;4.节点数量多,系统扩展性强;5.抗干扰性能好,通信稳定可靠。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM7处理器的CAN总线网络设计
1 引言
can(controller area network)即控制器局域网络,最初是由德国bosch公司为解决汽车监控系统中的自动化系统集成而设计的数字信号通信协议,属于总线式串行通信网络。
由于can 总线自身的特点,其应用领域由汽车行业扩展到过程控制、机械制造、机器人和楼宇自动化等领域,被公认为最有发展前景的现场总线之一。
can总线系统网络拓扑结构采用总线式结构,其结构简单、成本低,并且采用无源抽头连接,系统可靠性高。
本设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等持点。
2 系统总体方案设计
整个can网络由上位机(上位机也是网络节点)和各网络节点组成(见图1)。
上位机采用工控机或通用计算机,它不仅可以使用普通pc机的丰富软件,而且采用了许多保护措施,保证了安全可靠的运行,工控机特别适合于工业控制环境恶劣条件下的使用。
上位机通过can总线适配卡与各网络节点进行信息交换,负责对整个系统进行监控和给下位机发送各种操作控制命令和设定参数。
网络节点由传感器接口、下位机、can控制器和can收发器组成,通过can收发器与总线相连,接收上位机的设置和命令。
传感器接口把采集到的现场信号经过网络节点处理后,由can收发器经由can总线与上位机进行数据交换,上位机对传感器检测到的现场信号做进一步分析、处理或存储,完成系统的在线检测,计算机分析与控制。
本设计can总线传输介质采用双绞线。
图 1 can总线网络系统结构
3 can总线智能网络节点硬件设计
本文给出以arm7tdmi内核philips公司的lpc2119芯片作为核心构成的智能节点电路设计。
该智能节点的电路原理图如图2所示。
该智能节点的设计在保证系统可靠工作和降低成本的条件下,具有通用性、实时性和可扩展性等特点,下面分别对电路的各部分做进一步的说明。
图2 can总线智能网络点
3.1 lpc2119处理器特点
lpc2119是philips公司推出的一款高性价比很处理器。
lpc2119是基于一个支持实时仿真和跟踪的16/32位arm7tdmi-stm cpu,并带有128kb嵌入的高速flash存储器。
独特的加速结构使32位代码能够在最大时钟速率下运行,对代码规模有严格控制的应用可使用16位thumb模式将代码规模降低超过30%,而性能的损失却很小。
实行流水线作业,提供embedded ice逻辑,支持片上断点和调试点,具有先进的软件开发和调试环境。
lpc2119具有非常小的64脚封装、极低的功耗、多个32位定时器、4路10位adc、2路can、pwm通道、多个串行接口,包括2个16c550工业标准uart、高速i2c接口(400 khz)和2个spi接口,46个gpio以及多达9个外部中断使它们特别适用于汽车、工业控制应用以及医疗系统和容错维护总线。
lpc2119内部集成2个can控制器,每一个can控制器都与独立can控制器sja1000有着相似的寄存器结构。
其主要的区别在于标识符接收过滤的编程操作上,篇幅有限这里不作详述。
它的主要特性有:单个总线上的数据传输速率高达1mb/s;32位寄存器和ram访问;兼容
can2.0b,iso11898-1规范;全局验收滤波器可以识别所有的11位和29位标识符;验收滤波器为选择的标准标识符提供full can- style自动接收。
3.2 数据采集和人机接口
传感器接口的选用应根据实际系统所要实现的功能而定,由传感器将被测量转化成电量。
由于测试环境的电磁干扰、传感器和放大器自身的影响,往往使信号中含有多种频率成分的噪音,直接从传感器输出的信号需要经过信号调理电路作进一步的处理才能使后续电路得以正常工作。
经过调理后的信号输入到lpc2119的模拟信号输入端p0.27-p0.30,lpc2119内有4路10位adc,转换时间低至2.44μs。
人机接口利用lpc2119丰富的gpio接口采用led显示输出和键盘输入,如图2所示。
本设计采用4个led分别表示节点电源、数据通信状态、联机指示和错误指示。
键盘设计了6个按键用来设置节点的报文滤波、节点的波特率及节点复位等功能。
3.3 can总线接口
根据图2所示,can接口部分包括lpc2119(内置can控制器)、光电耦合器和总线收发器。
can总线遵循iso的标准模型,分为数据链路层和物理层。
在工程上通常由can控制器和收发器来实现。
收发器选择philips公司的tja1050高速收发器,它符合iso11898标准。
can
控制器主要完成can的通讯协议,实现报文的装配和拆分、接收信息的过滤和校验等。
收发器tja1050则是实现can控制器和通讯线路的物理连接,提高can总线的驱动能力和可靠性。
为了进一步提高系统的抗干扰能力,lpc2119引脚tx1、rx1与收发器tja1050并不是直接相
连的,而是通过高速光耦6n137后与tja1050相连。
电路中可采用隔离型dc/dc 模块向收发器电路供电。
dc/dc模块采用金升阳的b0505s-1w定电压输入隔离非稳压单输出型dc/dc模块,隔离电压≥1000vdc。
这样就可以很好地实现总线上各接点的电气隔离,这部分电路虽增加了复杂性,但却保证了稳定性和安全性。
tja1050与can总线的接口部分也采用了一定的安全和抗干扰措施,canh和canl与地之间并联了两个小电容ch和cl可以起到滤除总线上的高频干扰和一定的防电磁辐射的能力。
电容值须由节点的数量和波特率决定,当tja1050 的输出级阻抗大约是20ω,总线系统有10个节点速度是500kbps,则电容的值不应该超过470pf。
另外在两根can总线接入端与地之间分别反接了一个保护二极管,当can 总线有较高的负电压时通过二极管的短路可起到一定的过压保护作用。
根据tja1050的特性,本设计中can终端电阻使用了分裂终端,即总线端节点的两个终端电阻都被分成两个等值的电阻,用两个60ω的电阻代替一个120ω的电阻,这样可以有效的减少辐射。
由于使用了分裂终端,tja1050的emc性能得到优化而且不会产生扼流。
4 can总线应用层通信协议的制定
can总线应用层协议制定的总体目标是最大限度地发挥can总线的优异性能,使通信更加规范、可靠,提高实时性,降低总线负载率。
在设计系统的应用层通信协议时,需要考虑以下两个方面的内容:
(1)结合系统的设计要求,分析通信中所有信息对象,确定需要支持的通信传输模式; (2)确定标识符的分配方案,定义帧格式。
下面分别讨论之。
4.1 确定通信的传输模式
本系统要求实现广播式通信用来对全部从结点或部分从结点发布信息,同时主结点还要具备能够对单个结点进行操作的功能。
因此定义以下三种传输模式:
(1)支持全局/局部广播式通信。
主结点向全部或部分结点发送信息,从结点接收信息后进行相应动作,不回送确认信息。
(2)支持点对点式通信。
主结点向某个从结点发送信息请求数据,从结点接收到请求后读取数据,并向主结点发送请求的数据。
(3)支持点对点式通信。
主结点向某个从结点发送信息,从结点接收到信息后执行相应操作,但不回送确认信息。
4.2 确定标识符的分配方案
确定标识符的分配方案,定义帧格式。
标识符是can总线实现仲裁的依据,也是协议的关键,其分配方案要满足个节点及信息对优先级的要求。
本文在协议中定义了两种类型的帧:信息帧和数据帧。
信息帧用来传送主结点对从结点的命令、配置信息以及通信中的连接响应信息等。
而从结点向上传送过程数据则通过数据帧来实现。
信息帧的优先级高于数据帧。
设计中通信协议采用can2.0a标准帧格式,只用数据帧,不采用远程帧。
报文的格式如表1所示。
本文对11位id进行了重新定义。
dlc用于表示数据域的长度0~7个字节;m/s用于表示报文的传播方向,0表示主站向从站发消息,1表示从站向主站发消息;b/p表示通信方式,0表示广播式通信,1表示点对点通信;m/d表示帧类型,0表示信息帧,1表示数据帧;id(7-0)用于表示报文标识符;type用于表示报文是单帧报文还是多帧报文,该位为0时表示单帧或结束帧,该位为1时表示多帧报文;cmd表示命令标识,包括:0a表示上传命令,0b表示下载命令,0c表示联机命令,0d表示报警命令等;data表示数据域。
当上位机需要与子节点进行通信时,可用以上三种模式向can网络节点发送信息帧,can网络中的节点接收到信息帧后,通过判别标识符和命令标识来区别信息帧的类别,并将节点所需要的数据发送出去。
当网络节点发生突发事件时,可随时向上位机报告,上位机同样也是通过标识符来识别数据类型。
5 结束语
本文基于can总线技术,以lpc2119为核心,重点介绍了网络节点的硬件电路设计以及应用层协议的制定。
软件设计部分,在keil uvision3环境下,实现了can控制器的驱动程序和应用层协议,解决了现场传感器得到的测量信号利用下位机进行处理和存储,然后通过内置can控制器将数据发送到can总线上,完成与上位机的通讯。
设计具有通用性,实时性,可扩展性强的特点,现已通过调试,性能稳定,可以移植到其他系统中。