QFT飞行控制系统设计
飞行器的飞行控制系统设计与开发
飞行器的飞行控制系统设计与开发飞行器的飞行控制系统是飞行器运行的核心部分,它负责控制和管理飞行器的飞行姿态、导航和飞行指令执行等功能。
本文将讨论飞行器飞行控制系统的设计与开发,着重介绍系统的组成、控制算法和开发流程。
一、飞行控制系统的组成飞行控制系统由传感器、执行器、控制算法和数据处理等模块组成。
传感器负责采集飞行器的运行状态信息,包括姿态角、加速度、角速度、位置等。
执行器通过控制信号实施飞行器的姿态调整和舵面操作。
控制算法根据传感器采集的数据和飞行任务要求,计算出相应的控制指令。
数据处理模块负责处理传感器数据、执行器信号和控制指令等信息。
二、飞行控制系统的控制算法飞行控制系统的核心是控制算法,它确定飞行器的运行轨迹和姿态调整方式。
常用的控制算法包括PID控制、模糊控制和自适应控制等。
PID控制通过比较控制目标与实际输出之间的差异,调整控制信号,实现控制目标的稳定和精确控制。
模糊控制基于模糊逻辑推理,根据输入变量和一组规则,计算出相应的控制信号。
自适应控制能够根据环境的变化和飞行器的动态特性,自动调整控制参数,提高控制的性能和鲁棒性。
三、飞行控制系统的开发流程飞行控制系统的开发流程主要包括需求分析、系统设计、软硬件开发、测试验证和上线部署等步骤。
需求分析阶段确定系统的功能和性能要求,明确控制算法和硬件平台选择。
系统设计阶段根据需求分析的结果,设计系统的硬件架构和软件结构,并进行模块划分和接口定义。
软硬件开发阶段分别完成系统的软件编码和硬件电路设计,保证飞行控制系统能够准确计算和执行控制指令。
测试验证阶段对系统进行全面的功能验证和性能测试,确保系统满足设计要求。
上线部署阶段将飞行控制系统安装到飞行器中,并进行实际飞行测试,最终投入实际运行。
总结:飞行器的飞行控制系统是飞行器飞行过程中不可或缺的重要组成部分。
通过合理的系统设计、优秀的控制算法和严谨的开发流程,可以实现飞行器的稳定、精确和安全控制。
不断的技术创新和系统优化,将进一步提升飞行器的性能和应用范围,为航空事业的发展做出贡献。
基于EA/QFT的飞行控制律设计及其稳定性评估

2 基 本 理 论 简 介
2 1 特征 结构配置 .
运用状态反馈或者输 出反馈对 系统的特征值 和特 征 向量进行配置 的方法 称为特征结构配置 。通过对特征结
构的配置 ,可以使 系统达到预定的性能要求 ,尤其具有
实践 意义的 是 ,特征 结构配置 能够实 现变量 间的解 耦 。 对线性 时不变 系统 的状态 方程 :
其 中 ∈R , Y∈R ,U∈R , A ∈R“ ,
B∈尺n , C∈尺 ,上述 系统是 可控可观 的,且认 为
rn ( 、 a k B :m
g:
,rn ( ) a k C =r 。 利 用 输 出 反 馈
:FC 来进 行特征 结构配 置 。
对于系统 ( . ) 1 1 ,存在一个 输出反馈矩 阵,满足如
维普资讯
《 动 技 与 用 20年 7 第5 自 化 术 应 08 第2卷 期
控 制 理 论 与 应 用
Con rl to The y a d Appi t ns or n l i ca o
基 于 E / T的飞行控 制律设计及 其稳定性评估 Q A F
下要求:闭环系统 中有 ma ( r 个特征值可 以任意 xm,)
1 引 言
特征结 构配 置 ( A,eg n tu t r sin n ) E ie srcu e a s me t g
可为 系统 提供 满意 的操 作 品质和 良好 的解 耦性 能 ,所 设 计的控制器具有结 构简单、易于工程实现等优点 ,然 而这 种方 法基 于精 确数 学模 型 , 实 际系 统总 存在 不确 定性 。定量反馈理 论( T, q a tt t e e d a k QF u n ia i fe b c v
航空航天技术中的飞行控制系统设计与实现
航空航天技术中的飞行控制系统设计与实现飞行控制系统是航空航天技术中的重要组成部分,其设计与实现对于飞机和火箭的安全与性能具有关键影响。
本文将从飞行控制系统的原理、设计流程和实现方法三个方面,介绍航空航天技术中的飞行控制系统设计与实现。
首先,我们来了解飞行控制系统的原理。
飞行控制系统主要包括姿态控制、导航控制和推力控制三个方面。
姿态控制用于保持飞行器在空中的姿态,如保持平稳飞行、实现转弯等。
导航控制用于确定飞行器的位置和方向,实现航线导航。
推力控制用于调节发动机的推力输出,以实现速度和加速度的调节。
这三个方面相互协调、相互影响,共同完成飞行任务。
接下来,我们进入飞行控制系统的设计流程。
飞行控制系统的设计流程主要包括需求分析、系统分析、控制器设计、仿真验证和实验验证五个步骤。
需求分析是设计的第一步,这一步是确定飞行控制系统的功能需求和性能指标。
根据不同飞行任务和飞行器特性,如飞行速度、载荷要求等,确定系统的工作模式和性能指标。
系统分析是对飞行控制系统进行全面的技术分析。
包括飞行器的动力学和控制模型的建立、控制器的结构选择和参数计算等。
通过分析和建模,可以获得系统的数学模型,并为控制器设计提供依据。
控制器设计是飞行控制系统设计的核心环节。
根据系统的数学模型和性能指标,在控制理论的基础上,设计合适的控制器结构和参数。
常用的控制器设计方法包括PID控制器、模糊控制器和自适应控制器等。
仿真验证是飞行控制系统设计过程中的重要环节。
通过在计算机上建立飞行控制系统的仿真模型,可以模拟真实飞行环境中的各种情况。
通过仿真验证,可以评估设计的性能是否满足要求,并进行参数优化和系统调试。
实验验证是飞行控制系统设计的最终测试环节。
在实验室或飞行试验中,将设计好的控制器和飞行器进行组合,通过实际测试和数据分析,验证控制系统的性能和可靠性。
最后,我们来看飞行控制系统的实现方法。
飞行控制系统的实现方法主要包括硬件实现和软件实现两种。
DI_QFT控制器在四旋翼无人直升机飞行控制中的应用
文章编号:1671-637Ⅹ(2008)1220068204D I/QFT 控制器在四旋翼无人直升机飞行控制中的应用单海燕(南京航空航天大学自动化学院,南京 210016)摘 要: 首先建立了四旋翼无人机的非线性数学模型。
然后针对该无人机数学模型的不确定性和非线性,采用动态逆(D I )和定量反馈理论(QFT )相结合的方法设计了该无人机姿态回路的鲁棒控制器。
应用动态逆方法处理对象的非线性,将系统等效为一个解耦但存在不确定性的线性对象。
鉴于动态逆控制在气动参数摄动的情况下不能满足控制要求的事实,设计了QFT 控制器,QFT 控制器能克服对象的参数不确定性,保障系统的鲁棒性。
仿真结果表明,在气动数据变化±20%的范围内,D I/QFT 控制器实现了对姿态角的精确控制。
关 键 词: 四旋翼无人机; 飞行控制; 动态逆; 定量反馈理论; 鲁棒控制中图分类号: V271.4文献标识码: ACo m b i n ed D I /QFT fli ght con trol for a quad 2rotorunmanned heli copterSHAN Hai 2yan(College of A uto m ation,N anjing U niversity of A eronautics and A stronautics,N anjing 210016,China )Abstract: A nonlinear dyna m ic model for a quad 2r ot or un manned helicop ter is established .Considering the uncertainness and nonlinearity of the model,a method combining Dyna m ic I nversi on (D I )with Quantitative Feedback Theory (QFT )is used t o design a r obust contr oller for attitude l oop of the unmanned helicop ter .The dyna m ic inversi on method is used t o treat the nonlinearity,which makes the syste m equivalent t o a decoup led and uncertain linear object .Since dyna m ic inversi on contr oller can not satisfy the contr ol require ment when perturbati on exists in pneumatic para meter,a QFT contr oller is designed .The QFT contr oller can overcome the uncertainties and ensure the r obust stability of syste m.Si m ulati on result showed that the D I/QFT contr oller can i m p le ment p recise contr ol t o the attitude angle when pneu matic data varies within 20%.Key words: quad 2r ot or Unmanned Helicop ter; flight contr ol; dyna m ic inversi on; quantitative feedback theory; r obust contr ol0 引言四旋翼无人机是具有4个输入力和6个自由度的欠驱动动力学旋翼式直升机[1],该系统是能够准静态飞行的自主飞行器。
飞行器飞行控制系统的设计与实现
飞行器飞行控制系统的设计与实现飞行控制系统是飞行器中至关重要的部分,它负责控制和管理飞行器的飞行状态,确保飞行器稳定、安全地完成任务。
本文将介绍飞行器飞行控制系统的设计与实现,以及相关技术和方法。
一、飞行控制系统的设计原理飞行控制系统的设计原理主要包括三个方面:飞行器动力系统、传感器系统和执行器系统。
1. 飞行器动力系统:飞行控制系统需要根据飞行任务的要求,确定飞行器的动力系统。
通常,飞行器动力系统包括引擎、发动机或电力系统。
设计者需要根据飞行器的尺寸、负载和性能等因素,选择适合的动力系统。
2. 传感器系统:飞行器飞行控制系统需要通过传感器获取飞行器的状态信息,如姿态、位置、速度等。
传感器系统通常包括加速度计、陀螺仪、磁力计等传感器,用于测量和检测飞行器的姿态和运动状态。
3. 执行器系统:飞行控制系统需要根据传感器获取的信息,通过执行器控制并调整飞行器的姿态和航向等参数。
执行器系统通常包括舵面、扰流板、发动机喷口等执行器,用于改变飞行器的飞行姿态和轨迹。
二、飞行控制系统的实现方法1. PID控制方法:PID控制方法是一种经典的控制方法,通过调整比例、积分和微分三个参数,实现对飞行器的控制和稳定。
该方法广泛应用于飞行器的姿态控制和导航系统中。
2. 预测控制方法:预测控制方法是一种基于飞行器的模型和状态信息,预测未来状态并进行控制的方法。
该方法适用于对飞行器的轨迹和航线进行规划和控制。
3. 自适应控制方法:自适应控制方法是一种通过不断调整控制器参数,使其适应不同工况和环境的控制方法。
该方法能够提高飞行器的鲁棒性和适应性。
4. 模糊控制方法:模糊控制方法是一种基于模糊推理的控制方法,通过模糊化输入量、设定模糊规则和进行模糊推理,实现对飞行器的控制和稳定。
三、飞行控制系统的设计案例以一架四轴飞行器为例,介绍其飞行控制系统的设计与实现。
1. 动力系统:选择电动发动机和锂电池作为飞行器的动力系统。
电动发动机提供动力,锂电池提供电能。
基于降阶模型的弹性飞行器QFT控制器设计与仿真
基于降阶模型的弹性飞行器QFT控制器设计与仿真李爱军;孟文杰;徐丽娜;刘世民【期刊名称】《西北工业大学学报》【年(卷),期】2010(028)006【摘要】弹性飞行器具有很高的阶次,直接设计控制器会很困难,且不利于工程实现.为此,文章研究了基于降阶模型的控制器设计方法.以某大型弹性飞行器12阶模型为研究对象,首先利用平衡截断降阶方法对该模型降阶,所得到6阶的降阶模型能在较宽频段范围内近似全阶模型.然后,基于降阶模型,使用QFT方法设计飞行器的高度保持控制器,直接用于12阶模型的控制.给出了系统高度响应、鲁棒性验证以及系统状态和4阶弹性变形模态的仿真结果曲线.仿真结果表明,无论是在标称状态,还是当系统矩阵摄动的状态,高度响应都能快速跟踪指令信号,且无稳态误差,调节时间约为7s,系统的各阶结构弹性变形模态都得到了快速抑制,最终衰减为零.【总页数】5页(P916-920)【作者】李爱军;孟文杰;徐丽娜;刘世民【作者单位】西北工业大学,自动化学院,陕西,西安,710072;西北工业大学,自动化学院,陕西,西安,710072;西北工业大学,自动化学院,陕西,西安,710072;西北工业大学,自动化学院,陕西,西安,710072【正文语种】中文【中图分类】V249【相关文献】1.弹性飞机的QFT控制器设计 [J], 刘世民;章卫国;章萌;李爱军2.弹性飞行器的H∞控制器设计与仿真 [J], 孟文杰;李爱军;徐丽娜;刘宝3.基于QFT的船舶航向控制器设计与仿真研究 [J], 王杰;刘金锋;秦亚红;周永年4.基于INA-QFT的高超声速飞行器鲁棒控制器设计 [J], 李传锋;邓志翔;王永骥5.QFT/μ控制器设计法及其在飞行器控制中的应用 [J], 吕恩海;赵长安因版权原因,仅展示原文概要,查看原文内容请购买。
飞行控制系统设计和实现
飞行控制系统设计和实现随着现代化技术的发展,飞行控制系统越来越受到关注。
这个紧张的系统需要不断的改进和优化来确保飞行安全和效率。
本文将探讨飞行控制系统的设计和实现。
1. 什么是飞行控制系统?飞行控制系统是一个复杂的系统,是机床动力系统和飞行器自动控制系统的重要组成部分。
它包括飞行数据采集、飞行姿态控制、导航和通讯等几个部分。
这个系统使飞行器能够实现自动飞行、自动导航和自动登陆等功能。
2. 飞行控制系统设计的步骤飞行控制系统的设计是一个艰巨的任务,需要经验和技能的结合。
以下是设计飞行控制系统的一些步骤。
(1)需求分析首先需要对飞行控制系统的要求进行分析。
这包括飞行器的类型、尺寸、载荷、飞行速度等。
此外,还需要考虑航线和飞行路径、雷达和传感器、通讯要求等。
(2)算法与模型开发飞行控制算法是飞行控制系统的核心。
设计师需要根据飞行器的要求,选择适合的控制算法。
这个算法需要打造数学模型,建立相关的控制系统参数。
(3)软硬件设计飞行控制系统的设计需要软硬件结合。
硬件包括嵌入式芯片、传感器、作动器等。
基于硬件的芯片需要设计软件,以便更好地控制飞行器。
(4)测试与验证最后,需要对飞行控制系统进行测试和验证。
飞行控制系统需要在实际飞行之前进行严格的模拟测试。
测试过程中可能涉及到性能测试、抗干扰测试等。
3. 飞行控制系统实现的困难飞行控制系统的实现具有一定的困难性。
以下是一些常见的实现挑战。
(1)故障诊断故障诊断是飞行控制系统中的一个重要问题。
当出现故障时,需要快速诊断问题,确定解决方案,并及时修复问题。
(2)环境变化的影响飞行控制系统常常面临着复杂的环境变化,比如气流、飞行高度、天气等。
这将影响控制系统的精准性和稳定性。
(3)系统安全性问题安全问题是飞行控制系统的另一个关键问题。
这个系统需要不断考虑安全问题,比如安全机制设计、网络安全、信息安全等。
4. 飞行控制系统改进的新方法为了克服飞行控制系统实现中的困难,设计师不断寻找新的改进方法。
基于QFT的直升机全包线姿态控制器设计
( l g f tmain Naj gUnv ri f rn uis& As o a t sNa j g2 0 Chn ) Col eo o t , n ies yo o a t e Au o i n t Ae c t n ui , ni , ia r c n 1 1 0 6 A sat b t c:Heio trfl e v lpat u ec nrl rb sd o u ni t efe b c h oy ( T spo oe nti r l pe ul n eo t td o t l ae n q a t ai e d a kte r QF )i rp s di hs c i oe t v
p p rf rs l n h r b e o y t m n e t i te u o t e wi e r g a ito s o t e a i a d l fh lc p e a e o o vi g t e p o l m fs s e u c r a n i sd e t h d a e v r a i n fma h m t lmo e so e i o t r c
非 常 复 杂 的 多输 入 多 输 出 系 统 , 体 表 现 为 非 线 性 、 具 时变 、高 度 耦 合 、高 阶 、不 稳 定 、模 型 不 确 定 性 等 。
控 制 器 的设 计 通 常 基 于 线 性 化 模 型 。然 而 ,各 个 配 平 状 态 下 的线 性 模 型 差 异 性 非 常 大 , 因 而 给 设 计 一 个 覆 盖 整 个 飞行 包 线 的控 制 器 带 来 很 大 的 难 度 。 目前 , 国 内外 设 计 全 包 线 控 制 器 一 般 有 以下 几
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QFT 飞行控制系统设计4.1 引言在飞控系统中,被控对象(如直升机等)往往是非常复杂的多输入多输出系统,具体表现为非线性、时变、高度耦合、高阶、不稳定、模型不确定性等。
因此,这对设计一个覆盖整个飞行包线的控制器带来相当大的难度。
目前,国内外设计全包线控制器一般有以下几种方法: 增益调度(gain scheduling )、非线性动态逆(Non-Linear Dynamic Inversion )、定量反馈理论(QFT )、自适应控制(AC )等。
其中,国内外大多数采用增益调度方法。
本章将介绍一种工程上较为容易实现的强鲁棒控制理论—定量反馈理论(QFT )。
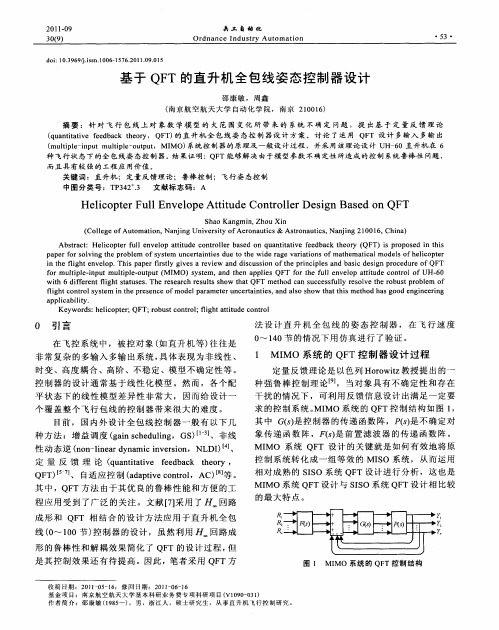
重点介绍了MIMO 系统设计QFT 控制器的原理和一般步骤。
4.2 MIMO 系统的QFT 控制器设计概述定量反馈理论(QFT )是以色列人Horowitz 教授提出的一种强鲁棒控制理论,它针对当对象具有不确定性和存在干扰的情况下,如何利用反馈信息设计出满足一定要求的控制系统这一问题而提出的。
QFT 的最初发展首先研究具有不确定性的线性时不变单输入单输出系统(LTI/SISO ),如图4.1所示。
其中,P 为不确定控制对象,r 为指令输入,y 为系统输出,1d 和2d 分别表示输入干扰和输出干扰,G 和F 为要设计的控制器和前置滤波器。
随着QFT 的理论研究的深入,进一步推广到多输入多输出、非最小相位/不稳定、时变及非线性等系统。
LTI/SISO 系统是QFT 研究的基础,而其他的MIMO 系统等都可以通过数学变化转化为等效的LTI/SISO 系统,再进行设计。
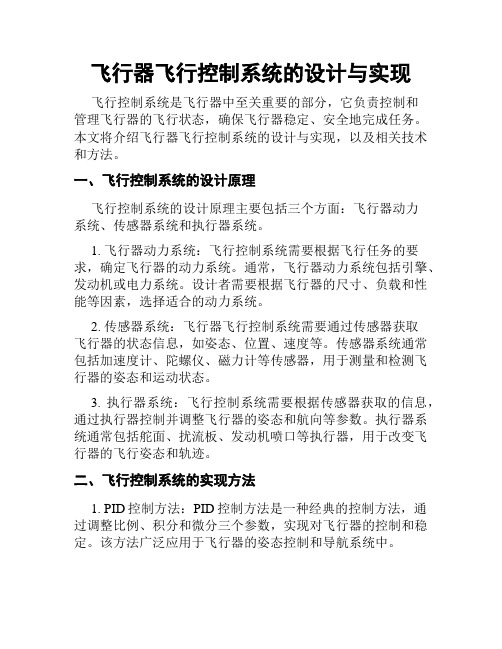
y图4.1 SISO 系统的QFT 控制框图MIMO 系统QFT 研究的重点就是如何有效地将原控制系统转化成一组等效的MISO 系统,从而可以运用相对成熟的SISO 系统QFT 设计分析,这也是MIMO 系统QFT 设计相比较与SISO 系统设计的最大特点。
图4.2给出了两输入两输出系统的等效过程。
可以看出原系统是22⨯系统,等效后变成了4个结构类似的21⨯子系统。
每个系统都有两个输入端,一个输出端。
两个输入分别是指令输入和由各子系统之间耦合作用引起的输入,即“干扰”输入。
然后,就可以对每个子系统采用SISO 系统的QFT 设计方法设计对应的控制器。
最后,将各子系统的设计结果综合起来就是原系统的设计结果。
图4.2 MIMO 系统到MIMO 系统的等效分解总体上说,MIMO 系统的QFT 控制器设计过程有几个关键步骤,1.MIMO 系统到MISO 系统的等效分解,从而可以运用相对成熟的SISO 系统QFT 设计分析。
2.对象模板。
它反映了对象的不确定范围,也是整个设计过程中的基础。
3.性能边界。
它的设计思想是把闭环系统的设计要求转化到尼柯尔斯(Nichols )图上进行约束的一系列边界,进而设计出满足边界条件的控制器来。
4.控制器和前置滤波器设计。
由于QFT 是种图形设计方法,控制器没有唯一的形式,需要经过多次尝试才能成功,当多个不同的控制器和前置滤波器都满足设计要求时,应该根据实际情况选择一组设计结果。
下面对上述的4个关键点分别展开讨论。
4.3 MIMO 系统到MISO 系统的等效由于在控制问题中,大多数被控对象是MIMO 系统,而对MIMO 系统来说,QFT 的设计思想是采用纯数学的变换方法对n n ⨯(如果不是,先转成n n ⨯)的MIMO 原系统等效分解成一组MISO 系统。
对于产生的2n 个等效子系统,每一个都有两个输入,一个输出。
一个是指令输入,另一个是“干扰”输入。
子控制系统之间的相互耦合作用在各个子系统中就是作为“干扰”出现的。
在完成等效后,便可以用SISO 系统的QFT 技术对各个子系统分别单独设计,最后综合它们的解便是原系统MIMO 的解。
设n n ⨯的MIMO 系统的闭环传递函数为[]1T I PG PGF -=+(4.3.1)其中,这里前置滤波器F 、控制器G 和不确定对象P 都是m m ⨯矩阵。
通常,控制器被简化成对角阵()(){}i G s diag g s =。
首先,在上面式4.3.1的等号两边分别左乘[]I PG +,得到[]I PG T PGF +=(4.3.2)若P 是非奇异的,在等号两边左乘1P -,则1P G T GF -⎡⎤+=⎣⎦(4.3.3)已知[]ij m m P p ⨯=,令1*1[][]ij m m m m ijP p q -⨯⨯==(4.3.4) *1[][]m m ij m m ijQ q p ⨯⨯==(4.3.5) 矩阵1P -可以分为两部分1*1[][]ij m m m m ijP p B q -⨯⨯===Λ+(4.3.6) Λ和B 分别是1P -的对角和非对角部分,式4.3.3可重写为1[][]T G GF BT -=Λ+-(4.3.7)根据Schauder 固定点定理,可定义关于T 的映射Y(T),使1()[][]Y T G GF BT T -=Λ+-≡(4.3.8)若在允许范围内存在一个固定点T 使得()Y T T ≡,则这个T 就是方程4.3.8的解。
因为Λ和G 都是对角阵,于是有()ij ii ij ij y w v c =+(4.3.9)其中,,,[],1,2,,1kj iiii ij i ij ij k l i ii ikt q w v g f c k m g q q ≠===-=+∑L 。
系统闭环传递函数阵()T s 共有2n 个子传递函数ij y ,ij y 表示从第j 个“期望”输入j r 到第i 个输出的传递函数,这里ij c 表示干扰输入,那么,就可以用SISO 系统的QFT 设计方法对每个ij y 进行设计,最终的解就是MIMO 系统的设计结果。
因此,式4.3.9可重写成j ij ij r c y y y =+从上式显然可以看出,系统输出有两部分决定,一是指令输入,二是“干扰”输入。
下面对一个22⨯的MIMO 系统做具体分析。
11122122p p P p p ⎡⎤=⎢⎥⎣⎦1112221212111212211111q q p p P p p q q -⎡⎤⎢⎥-⎡⎤⎢⎥==⎢⎥-∆⎢⎥⎣⎦⎢⎥⎣⎦其中11221221,112122222111,,p p p p q q q p p p ∆-∆∆∆=-===。
将1P -代入式4.3.3,得1111211121111122122221222221221111g q q t t g f g f t t g f g f g q q ⎡⎤+⎢⎥⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦+⎢⎥⎣⎦从而得到对于输入1r :211111122112211121121122,11t t g f g f q q t t g g q q --==++对于输入2r :221211222212211222121122,11t t g f g f q q t t g g q q --==++上面等式右边分子分母同乘11q 或22q ,可以得到对应的一组MISO 系统,如图4.2。
在实际的QFT 设计中,常常简化前置滤波器F 为对角阵,即()(){}i F s diag f s =。
这种方法也叫“近似不相关”(BNIA ),对于原22⨯系统,图4.3给出了BNIA 设计法中MISO 系统。
从图4.3可以看出,位于同一列的两个回路具有相同的控制器和被控对象,其中一个回路简化为只有抗干扰要求,另一个回路除抗干扰要求外,还要有跟踪性能要求。
也就是说,综合考虑两个抗干扰性能要求和一个跟踪性能要求,得到综合指标,从而只需要对一个回路进行QFT 设计就能同时保证两个回路的性能要求。
这种方法虽然简化了设计过程,但仍能保证整个设计的正确性。
至此,一个22⨯的MIMO 系统等效完毕。
同理,m m ⨯的MIMO 系统也可以转化为一组等效的MISO 系统。
1-11y 1-21y 1-12y 22y图4.2 等效后的MISO 系统1-11y 1-21y 1-12y 22y4.3 BNIA 设计法的MISO 系统4.4 对象模版及性能边界的设计系统的不确定性可以是参数形式的、非参数形式的或者混合形式的。
例如,参数不确定性可以定义为传递函数形式,()()()(),25,13,323,16k s a P s k a b c s b s c +=≤≤≤≤≤≤≤≤++。
相反的,非参数不确定不是以参数形式表示系统的不确定性范围,而是以不含参数的传递函数形式直接表示。
例如,本文中的控制对象为UH-60直升机,直升机在0节、20节、40节、60节、100节和140节处的数学模型是已知的,因此,非参数不确定性就是这六个数学模型组成的集合。
混合形式的不确定性可以表示为上述两种形式的组合。
设计控制器必须规定一个基准对象,也即标称对象(Nominal plant )。
从上述非参数不确定性对象模型中选择一个作为标称对象()0P s ,并且选取一组有代表性的,能够表征系统最大范围不确定性的频率点,0,1,2,,,i w i n =K 组成频率点集w 。
在每个频率点,对非参数不确定对象集合中的所有对象进行频率响应分析,所有这些响应的集合,表征了对象在某一频率点下以定量形式描述的不确定性范围,映射到Nichois 图上就是一个有界区域,如图4.4。
这个区域就是描述对象不确定性特性的对象模板,也是QFT 设计的基础。
需要指出的是,在QFT 设计过程中,给出合理的对象模板非常重要,一般模板越大,说明对象不确定性越强,反之则表示越弱。
图4.4 对象在频率点i w 处的不确定性区域前面提到QFT 是在Nichols 图上进行设计的,将闭环系统的设计要求转化为Nichols 图上的边界是重要一环。
性能边界包括鲁棒稳定边界、跟踪边界和抗干扰边界等。
1. 鲁棒稳定边界鲁棒稳定边界保证基准对象的开环频率曲线不与Nichols 图上的临界点(-180,0dB )或复平面上的临界点(-1,0)相交,并且有一定的区域限制范围。
稳定边界在Nichols 图上一般是闭环曲线。
设计时一定要确保开环传递函数的频率特性曲线不能进入该闭环曲线所表示的封闭区间,就可以得到鲁棒稳定性的要求。
2.跟踪边界跟踪边界确保了跟踪性能的鲁棒性,也就是说,对不确定性范围内的任何数学模型在控制器的作用下,闭环系统都有良好的跟踪性能。
根据设计指标要求,闭环跟踪响应曲线应该在可以容许的上下界内,满足以下式子()()()L U T jw T jw T jw ≤≤其中L T 和U T 分别是上、下界跟踪指标。
通常,控制系统的性能指标是以时域形式(超调量、 响应时间等)表示的,应该把时域形式的指标转化成频域指标。
3.抗干扰边界抗干扰指标包括抗输入干扰指标和抗输出干扰指标。