机器人舵机说明
学生机器人舵机介绍文案

学生机器人舵机介绍文案机器人的舵机是机器人的关键部件之一,也是控制机器人运动的重要组成部分。
在学生机器人中,舵机扮演着非常重要的角色,它可以使机器人的运动更加灵活、精准,增加机器人的功能和表现力。
首先,我们来介绍一下舵机的工作原理。
舵机是一种能够控制角度的伺服电机,它通过接收控制信号来控制自身的转动角度,从而控制机器人的运动。
舵机通常由电机、减速器、控制电路和位置反馈系统组成。
当控制信号改变时,舵机会根据信号的大小和方向来转动到相应的角度位置,使机器人的各个关节或部件实现精确的运动控制。
在学生机器人中,舵机的应用非常广泛。
首先,舵机可以用来控制机器人的运动,例如控制机器人的手臂、腿部或其他机械结构的运动。
通过调整舵机的角度,学生可以使机器人做出各种动作,如抓取物体、挥动手臂、行走等,从而实现机器人的各种功能。
此外,舵机还可以用来控制机器人的摄像头、传感器等部件的转动,使机器人可以更好地感知周围环境,实现自主导航和避障等功能。
另外,舵机还可以用来控制机器人的表情和声音。
通过控制舵机的角度,学生可以让机器人的嘴巴、眼睛等部件做出各种表情,增加机器人的互动性和表现力。
同时,舵机还可以用来控制机器人的音响模块,使机器人可以发出各种声音,如说话、歌唱、发出警报等,使机器人的功能更加丰富和多样化。
总的来说,舵机是学生机器人中非常重要的组件,它可以使机器人的运动更加灵活、精准,增加机器人的功能和表现力。
通过学习和掌握舵机的原理和应用,学生可以更好地设计和控制机器人,培养动手能力和创造力,提高机器人的性能和功能,为未来的科技创新打下坚实的基础。
希望学生能够认真学习机器人舵机的知识,不断探索和实践,发挥机器人的潜力,创造更加美好的未来。
AX-12数字舵机手册中文

AX-12数字舵机手册中文Dynamixel AX-12AX-12概览和特性系列机器人舵机是一种智能化、模块化动力装置,由齿轮减速箱、能产生大扭矩,材保证承受极大外力必需的强度和韧性。
工作时可反馈内部状况,例如内精确控制1024等分控制。
柔性驱动反馈报警系统通讯1Mbps。
分布式控制速度、伺服性和扭矩可以通过一个指令包设定,这样主控制器即使资工程塑料LED指示灯主要参数g) 551/2547V 10Vkgf·cm) 12 16.5/60°) 0.269 0.196通讯半双工异步串口通讯(8bit、1中断位,无奇偶校验)最小角度0.35°波特率 7343 bps ~ 1M bpsID扩展 0 ~ 253工作电压 7VDC ~ 10VDC(推荐9.6V)工作温度 -5℃ ~ +85℃最大电流 900mA指令包数字信号位移角度0°~ 300°,无限旋转物理连接 TTL多通道(带菊花链传输线)反馈位置、温度、负载和输入电压等外壳材料工程塑料1Dynamixel 舵机操作传输线组装使用合适的夹线钳。
如果手边没有夹线钳,可焊接通讯线针脚排布传输线针脚排布如图。
舵机有两个插座,只要连接其中一个,连接如图,舵机连接是针脚对针脚的,这样,只需一条总线通道主控制器为了控制舵机,主控制器必须支持TTL半双工UART协议。
CM-5控制器,也可以使用其它合适的控制器。
计算机连接计算机通过RS232与控制器连接,再通过控制器控制舵机。
与UART连接要控制Dynamixel舵机,主控制器需要转换UART 信号为21和针脚2。
(上图只用于说明半双工UART的CM-5控制器已内嵌上述电路,因此Dynamixel舵机可直接与之连接。
)发射和接收数据信号的方向取决于下面的“方向端口”信号水平:半双工UART 半双工UART使多个舵机通过多通道方式连接至单个节连接Dynamixel舵机时确保针脚排布正确。
舵机就是难控制?懂得这些原理让你玩溜机器人

舵机就是难控制?懂得这些原理让你玩溜机器人舵机最常见的应用是机器人,机器人完成的各种动作,多是由舵机提供动力。
在电子竞赛,机器人比赛中,我们有经常需要使用舵机配合结构件完成一些动作。
六足机器人舵机实物图:舵机舵机的组成舵机是一种位置伺服的驱动器,主要是由外壳、控制电路板、电机、齿轮与位置检测器所构成,电路板上电源线和信号线引出来用来控制。
舵机结构舵机的工作原理它工作原理是由接收机或者单片机发出PWM信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC 判断转动方向,再驱动电机开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
舵机原理框图舵机适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
一般舵机旋转的角度范围是0 度到180 度。
舵机的使用方法舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机管脚信号舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms 之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
舵机的工作原理
舵机的工作原理引言概述:舵机是一种常见的电机控制装置,广泛应用于机器人、遥控模型、航空模型等领域。
它的工作原理是通过接收控制信号,控制电机的转动角度,从而实现精确的位置控制。
本文将详细介绍舵机的工作原理。
一、电机驱动部分1.1 电机类型舵机常用的电机类型有直流电机和步进电机。
直流电机具有转速高、输出扭矩大的特点,适用于需要快速响应和高扭矩输出的应用场景。
而步进电机则具有精确控制位置的能力,适用于需要高精度定位的场合。
1.2 电机驱动电路舵机的电机驱动电路通常由电机驱动芯片和功率放大器组成。
电机驱动芯片负责接收控制信号,并将其转化为电机的转动角度。
功率放大器则负责驱动电机,提供足够的电流和电压,以确保电机能够正常工作。
1.3 控制信号舵机的控制信号通常采用脉冲宽度调制(PWM)信号。
控制信号的脉冲宽度决定了舵机的转动角度,通常以周期为20ms的方波信号为基准,通过改变高电平的脉冲宽度来控制舵机的位置。
二、反馈传感器部分2.1 位置反馈舵机通常内置有位置反馈传感器,用于实时监测电机的转动角度。
位置反馈传感器可以是光电编码器、霍尔传感器等,通过检测转子的位置变化来反馈给控制系统,以实现闭环控制。
2.2 电流反馈除了位置反馈外,舵机还可以通过电流传感器来实现电流反馈。
电流反馈可以监测电机的负载情况,以避免过载或过电流的情况发生,并保护舵机的安全运行。
2.3 温度反馈舵机还可以通过温度传感器来实现温度反馈。
温度反馈可以监测舵机的工作温度,一旦温度过高,就可以及时采取措施进行散热或降低负载,以保护舵机的正常运行。
三、控制算法部分3.1 位置控制算法舵机的位置控制算法通常采用PID控制算法。
PID控制算法通过不断调整舵机的控制信号,使得实际位置与目标位置之间的误差最小化,从而实现精确的位置控制。
3.2 速度控制算法除了位置控制外,舵机还可以实现速度控制。
速度控制算法通常基于位置控制算法的基础上,通过对位置误差的微分来计算速度指令,从而实现对舵机转速的控制。
舵机速度控制原理
舵机速度控制原理一、简介舵机是一种常见的电机装置,用于控制机器人或其他设备的角度或位置。
舵机速度控制是指调节舵机旋转的速度,使其能够按照预定的速度进行移动。
本文将深入探讨舵机速度控制的原理及相关知识。
二、舵机基本原理舵机的基本原理是通过提供电流来驱动电机转动,同时通过电子电路控制电机的角度。
舵机通常由一个电机、一个位置传感器和一个电子电路组成。
当电流通过电机时,电机开始旋转。
位置传感器会监测电机的角度,并将这一信息传输给电子电路。
电子电路会根据接收到的角度信号,控制电机的转动,使其停留在特定的位置。
三、舵机速度控制原理舵机速度控制是在舵机基本原理的基础上,通过控制电机旋转的速度来实现的。
下面将介绍舵机速度控制的原理和实现方法。
1. PWM信号控制舵机速度的控制是通过改变PWM信号来实现的。
PWM即脉宽调制信号,它的工作原理是通过改变信号的脉冲宽度来控制电机的转速。
舵机所接收的PWM信号通常是一个周期为20ms的方波信号,脉冲宽度在0.5ms到2.5ms之间,其中1.5ms为中间位置。
脉冲宽度越大,舵机转动的角度也越大,速度也就越快。
2. 舵机控制电路为了实现舵机的速度控制,需要添加一个舵机控制电路。
舵机控制电路通常由微控制器、驱动电路和PWM信号发生器组成。
微控制器负责接收输入的速度指令,并将其转换成相应的PWM信号。
驱动电路负责放大电流并驱动电机转动。
PWM信号发生器则用于生成PWM信号,并将其发送给舵机。
3. 控制算法舵机速度控制的实现还需要控制算法的支持。
常见的控制算法有以下几种:•开环控制:根据速度指令直接控制PWM信号的脉冲宽度。
这种方法简单但不够准确,容易受到外界干扰而导致误差增大。
•闭环控制:根据速度指令和实际转速的差异,通过调整PWM信号来控制舵机的速度。
闭环控制能够更精确地控制舵机的速度,但需要额外的位置传感器来监测实际转速。
•PID控制:PID控制是一种常用的闭环控制算法,通过比较实际转速和目标转速的差异,计算出一个修正量,再通过调整PWM信号的脉冲宽度来控制舵机的速度。
舵机操作规程
舵机操作规程一、引言舵机是一种用于控制机械系统中转动角度的设备,广泛应用于无人机、机器人、模型船等各种电动机械系统中。
为了确保舵机的稳定工作和延长其使用寿命,制定一套科学合理的舵机操作规程是非常重要的。
本文档旨在为使用舵机的操作人员提供一些基本的操作准则和注意事项。
二、舵机操作规程1. 电源准备在使用舵机之前,要确保给舵机供电的电源稳定可靠。
常用的供电电压为4.8V至6V,可以通过电池组、稳压模块或者直流电源等供电方式进行连接。
应注意电源的极性,确保正负极接线正确,以避免电源反接导致舵机损坏。
2. 连接舵机将舵机的信号线、电源线和地线连接到控制设备或电源上。
注意信号线的连接要与控制设备或接收机的对应通道连接,以确保舵机能够被正确控制。
为了避免线缆松动,可以使用适当的固定装置将线缆固定好,确保连接可靠稳定。
3. 舵机调节在操作舵机之前,需要对舵机进行调节,使其能够在适当的角度范围内工作。
可以通过调节舵机的零点位置和极限位置,使其可以达到所需的角度范围。
具体的调节方式和范围可以参考舵机的使用说明书或者相关文档。
4. 控制信号通过控制设备发送信号来控制舵机的转动角度。
通常情况下,舵机的控制信号是通过脉宽调制(PWM)的方式发送的。
脉宽的长度决定了舵机转动的角度,通常一个周期约为20ms,脉宽范围在1ms至2ms之间。
根据具体的控制设备和舵机型号,可以设置相应的脉宽来控制舵机的转动角度。
5. 注意事项(1)舵机工作时产生的振动和冲击会影响舵机的寿命,因此在安装舵机时要注意使用适当的防震装置,减少振动和冲击对舵机的影响。
(2)舵机温度过高会影响其工作效果和寿命,因此在使用过程中要注意舵机的散热问题,避免过度工作导致温度过高。
(3)舵机在工作时会消耗一定的电流,因此要根据舵机的额定电流和供电设备的电流输出能力来选择合适的供电设备,以保证供电稳定可靠。
(4)舵机在运动过程中可能会发出一些噪声,在使用过程中要注意舵机噪声对周围环境的影响,避免造成不必要的干扰。
昆仑气动机器人舵机产品说明书

Catalog PDN1000-2USParker Pneumatic• Medium duty to extremely heavy duty linear motion• Powered by the 3MA or 4MA NFPA cylinder, with ISO options available • Bore sizes 1-1/2", 2", and 2-1/2"• Thrust, reach, and compact versions available• Shock absorber, bumpers/stop collars, and proximity sensor options availableOrdering information for HBC, HBT and HBRActuator Products – Guided Cylinders HB SeriesFor sensors see page B294.Click here to view bookmarks.Modelnumber A B C Ds*Do**EF NPTF F BSPP K L M N P R S T U 151 3.25 6.00 2.2520mm (0.79) 25mm(0.98)0.3751/411/4 1.06 5.19 6.260.94 5.88 1.94 4.250 1.375 2.75020 4.007.25 2.7525mm (0.98)30mm(1.18)0.5003/81/4 1.31 6.397.00 1.197.13 2.44 5.000 1.750 3.250255.009.003.2530mm (1.18)35mm (1.38)0.5003/83/81.567.828.381.448.882.886.5002.0003.750Model number V W X Y AA BB CC EE FF GG HH JJ KK LL MM 1510.2510.27 2.7500.7500.281/4 1.750 1.500 2.310.501/4-20 2.500.753/8 2.500200.3130.33 3.2500.7500.345/16 2.250 1.750 2.310.635/16-18 3.000.883/8 3.000250.3760.394.0001.5320.413/83.0002.2502.380.753/8-164.001.001/24.000* Standard shafting ** Oversized shafting1 Model 15 with Cylinder Type 3A (3MA cylinder) has 3/8" NPTF ports.All dimensions in inches unless otherwise noted.Model number A B C Ds*Do**E F NPTF F BSPPK L M N P R S T 15 5.0 6.00 2.2520mm (0.79)25mm (0.98)0.3751/4 11/4 1.06 6.948.190.94 5.88 1.94 4.250 1.37520 5.57.25 2.7525mm (0.98)30mm (1.18)0.5003/81/4 1.317.888.94 1.197.13 2.44 5.000 1.750256.59.003.2530mm (1.18)35mm (1.38)0.5003/83/81.569.3110.311.448.882.886.5002.000Model numberU V W X Y AA BB CC EE FF GG HH JJ KK 15 2.7500.2510.27 2.750 1.9380.281/4 2.500 1.500 2.310.501/4-20 4.250.6920 3.2500.3130.33 3.250 2.2500.345/16 2.750 1.750 2.310.635/16-18 4.500.88253.7500.3760.394.0002.7500.413/83.5002.2502.380.753/8-165.501.00* Standard shafting ** Oversized shafting1 Model 15 with Cylinder Type 3A (3MA cylinder) has 3/8" NPTF ports.All dimensions in inches unless otherwise noted.Model number A B CDs*Do**E F NPTF F BSPP K L M N P R S T 158.00 6.00 2.2520mm (0.79)25mm (0.98)0.3751/4 11/4 1.069.9411.190.94 5.88 1.94 4.250 1.3752010.007.25 2.7525mm (0.98)30mm (1.18)0.5003/81/4 1.3112.3913.44 1.197.13 2.44 5.000 1.7502512.009.003.2530mm (1.18)35mm (1.38)0.5003/83/81.5614.8215.821.448.882.886.5002.000Model number U V W X Y AA BB CC EE FF GG HH JJ KK 15 2.7500.2510.27 2.750 1.9380.281/4 5.500 1.500 2.310.501/4-207.250.6920 3.2500.3130.33 3.250 2.2500.345/167.250 1.750 2.310.635/16-189.000.88253.7500.3760.394.0002.7600.413/89.0002.2502.380.753/8-1611.001.00* Standard shafting ** Oversized shafting1 Model 15 with Cylinder Type 3A (3MA cylinder) has 3/8" NPTF ports.All dimensions in inches unless otherwise noted.The graphs illustrate the side load vs. actuator stroke for the three HB slide sizes. Applied loads will cause a slight deflection of the support rods. The graphs include the weight of the support rods and tooling plate and are based on a bearing life equivalent to 10 million cycles for dynamic conditions. Higher dynamic loads will reduce cycle life. For static loads, multiply the information in the graph by 1.5.Note: Actuator life may vary depending on the severity of the following variables:• Acceleration• Velocity• Vibration• OrientationHBC1508121620Stroke + "d"(inch)Load(lb)5152025Stroke + "d" (inch)Load(lb)Stroke + "d" (inch)HBC20HBC25 4HBT1512Stroke + "d" (inch)Load(lb)510152025Stroke + "d" (inch)Stroke + "d" (inch)HBT20HBT25 4HBR15Load(lb)30510152025HBR20HBR25EXAMPLE:An HBT15 with ball bearingsand a “stroke+d” of 12" wouldhave a load capacity of 20 lbs.“d”LoadDeflectionThe graphs illustrate the side load vs. actuator stroke for the three HB slide sizes. Applied loads will cause a slight deflection of the support rods. Deflection distance is alsoshown. The graphs include the weight of the support rods and tooling plate and are based on a bearing life equivalent to 10 million cycles for dynamic conditions. Higher dynamic loads will reduce cycle life. For static loads, multiply the information in the graph by 1.5.Note: Actuator life may vary depending on the severity of the following variables:• Acceleration• Velocity • Vibration • OrientationL o a d (l b )HBC15812162024Stroke + "d" (inch)L o a d (l b )01520Stroke + "d" (inch)L o a d (l b )001218Stroke + "d" (inch)HBC20HBC25430L o a d (l b )HBT1524Stroke + "d" (inch)L o a d (l b )Stroke + "d"(inch)L o a d (l b )Stroke + "d" (inch)HBT20HBT254EXAMPLE:An HBT15 with oversized composite bushings and a “stroke+d” of 8" would havea load capacity of 60 lbs.L o a d (l b )HBR158121620L o a d (l b )903005152025L o a d (l b )1218HBR20HBR254250300“d”LoadDeflectionAsymmetrical loading occurs when the load is applied to one side of the unit. HB Series units can resist torsional loads that are asymmetrical. The graphs show torsional load capacity for both standard and oversized shafting under dynamic conditions For static applications, multiply the information in the graphs by 1.5. The vertical load for HBN does not include the weight of the tool plate and support rods.Note: Actuator life may vary depending on the severity of the following variables:• Acceleration• Velocity• Vibration• OrientationAsymmetrical Torque CapacityHBC15Stroke + "d" (inch)Torque(lb-in)Torque(lb-in)Torque(lb-in)101525Stroke + "d" (inch)Stroke + "d" (inch)HBC20HBC25HBT15Stroke +“d”(inch)Torque(lb-in)Torque(lb-in)60Stroke +“d”(inch)012243036Stroke +“d”(inch)HBT20HBT256HBR15051020Stroke + "d" (inch)101525HBR2015800800600400200012243036HBR256100012001400Torque(lb-in)Torque(lb-in)Torque(lb-in)Torsional LoadVertical Eccentric Load CapacityHB Series units mounted vertically will have the sameeccentric load capacity regardless of orientation. The graphs provide maximum load capacity for an eccentric mounted load on a 4" stroke cylinder. The load is assumed to be mounted at the face of the tooling plate.Note: Actuator life may vary depending on the severity of the following variables:• Acceleration • Velocity • VibrationHBC15Eccentricity (inch)L o a d (l b )0HBC20Eccentricity (inch)HBC25Eccentricity (inch)HBT155101520Eccentricity (inch)L o a d (l b )HBT20Eccentricity (inch)L o a d (l b )HBT25Eccentricity (inch)EXAMPLE:An HBT15 with ball bearings carrying an eccentric load with an eccentricity distance of 15" would have a load capacity of 40 lbs.HBR15L o a d (l b )HBR20HBR25。
舵机的使用方法

舵机的使用方法舵机是一种常用的电子元件,广泛应用于机器人、航模、船模等领域。
它通过接收控制信号来控制舵机的转动角度,从而实现对机械臂、舵面等部件的精确控制。
本文将介绍舵机的使用方法,包括舵机的连接、控制信号的发送和常见问题的解决。
一、舵机的连接舵机通常有三根线,分别是电源线、地线和控制信号线。
其中电源线用于连接舵机的供电源,地线用于连接电源的地线,控制信号线用于接收控制信号。
舵机的电源通常需要直流电压供应,常见的电压为5V或6V。
可以通过将电源线连接到电源模块或电池组来为舵机提供电源。
地线需要与电源的地线连接,以确保电路的闭合。
通常,地线可以直接连接到电源的负极或者控制板上的地线引脚。
控制信号线则需要接收控制信号,通常是一个PWM信号。
可以将控制信号线连接到控制板上的一个数字引脚,通过控制板发送PWM信号来控制舵机的转动角度。
二、控制信号的发送舵机的转动角度是由控制信号的脉冲宽度来决定的。
通常,一个周期的脉冲宽度为20ms,其中高电平的持续时间决定了舵机的转动角度。
舵机通常有一个工作范围,一般是0°到180°。
在这个范围内,舵机的转动角度与脉冲宽度之间有一个线性关系。
具体地,当脉冲宽度为1ms时,舵机会转到最小角度;当脉冲宽度为1.5ms时,舵机会转到中间位置;当脉冲宽度为2ms时,舵机会转到最大角度。
因此,要控制舵机的转动角度,只需要发送相应脉冲宽度的控制信号即可。
可以通过控制板上的PWM输出来发送控制信号,使用编程语言编写相应的代码来控制舵机的转动角度。
三、常见问题的解决在使用舵机的过程中,可能会遇到一些常见问题,下面介绍几种常见问题的解决方法。
1. 舵机不转动或转动异常:首先检查舵机的电源是否正常供电,确认电源线和地线连接正确。
然后检查控制信号线是否连接到正确的引脚上,并确保发送的控制信号正确。
2. 舵机转动角度不准确:检查控制信号的脉冲宽度是否正确,可以通过调整控制信号的宽度来校准舵机的转动角度。
sg90舵机使用手册
sg90舵机使用手册【最新版】目录1.SG90 舵机的概述2.SG90 舵机的使用方法3.SG90 舵机的编程技巧4.SG90 舵机的应用实例5.SG90 舵机的注意事项正文一、SG90 舵机的概述SG90 舵机是一种常用的舵机,广泛应用于机器人、无人机等领域。
它可以通过 PWM 信号控制旋转角度,具有响应速度快、精度高等特点。
SG90 舵机的旋转角度为 90 度,可以通过编程控制实现连续旋转。
二、SG90 舵机的使用方法1.连接电路:将 SG90 舵机与微控制器相连接,通常需要连接三根线,分别是电源线、地线和信号线。
2.设置 PWM 信号:通过微控制器发送 PWM 信号,控制舵机的旋转角度。
PWM 信号的频率范围一般为 50-1000Hz,信号占空比为 0-2.55V。
3.调试:通过调整 PWM 信号的频率和占空比,观察舵机的旋转情况,以确保舵机正常工作。
三、SG90 舵机的编程技巧1.使用 PWM 库:针对不同的微控制器,可以使用相应的 PWM 库,简化 PWM 信号的生成和控制。
2.设置舵机的中立位:在编程时,可以设置舵机的中立位,使得舵机在没有接收到信号时停留在特定的角度。
3.使用多个舵机:如果有多个舵机需要同时控制,可以在程序中使用多个 PWM 信号,分别控制各个舵机的旋转角度。
四、SG90 舵机的应用实例1.机器人控制:SG90 舵机可以用于机器人的关节控制,实现机器人的精确运动。
2.无人机控制:SG90 舵机可以用于无人机的飞行控制,实现无人机的稳定飞行。
3.智能家居:SG90 舵机可以用于智能家居的控制,例如智能窗帘、智能门窗等。
五、SG90 舵机的注意事项1.在使用 SG90 舵机时,需要确保电路连接正确,避免短路等情况。
2.在编程时,需要根据实际情况设置 PWM 信号的频率和占空比,以确保舵机正常工作。
电动旋转机器人舵机说明书

Part no. Clamp side spring return FSTF120 US CWFSTF120.1 US CW (bulk pack)FSTF120.1 CCW CCW (bulk pack)FSTF120-S US CW CWFSTF120-S.1 US CW (bulk pack)FSTF120-S.1 CCW CCW (bulk pack)FSTF24-S.1 US CW (bulk pack)† UL File XAPX.E108966Torque 18 in-lb, 250°F for 30 min, for fire and smoke dampers ApplicationThe type FSTF spring-return actuator is intended for the operation of smoke and combination fire and smoke dampers in ventilation and air-conditioning systems. The actuator will meet requirements of UL555 and UL555S when tested as an assembly with the damper. Square footage of damper operated will depend on make and model per damper manufacturer UL testing.OperationMounting of the actuator to the damper axle shaft or jackshaft is via a cold-weld clamp. Teeth in the clamp and V-bolt dig into the metal of both solid and hollow shafts maintaining a perfect connection. The specially designed clamp will not crush hollow shafts. The bottom end of the actuator is held by an anti-rotation strap or by a stud provided by the damper manufacturer. The actuator is mounted in its fail safe position with the damper blade(s) typically closed. Upon applying power, the actuator drives the damper to the open position. The internal spring is tensioned at the same time. If the power supply is interrupted, the spring moves the damper back to its fail-safe position.and output wiring with suitable flexible conduit. Properly terminate the conduit in a suitable junction box. Retrofit Safety NoteUse of the FSTF for replacement of other makes of actuators is limited in damper area. The FSLF is preferred for direct coupled applications. The FSTF may be applied for linkage applications on dampers 1.5 sq.ft. and smaller at velocities under 2000 fpm.FSTF230 USOn/Off, Spring Return Fail-Safe, 230 VACD a t e c r e a t e d , 03/08/2019 - S u b j e c t t o c h a n g e . © B e l i m o A i r c o n t r o l s (U S A ), I n c .Typical SpecificationAll smoke and combination fire and smoke dampers shall be provided with Belimo FSTF, FSLF, FSNF, or FSAF actuators. All substitutions must be approved before submission of bid. Damper and actuator shall have UL 555S Listing for 250°F &/or 350°F. Actuator shall have been tested to UL 2043 per requirements of IMC 602.2 and NEC 300.22 (c). Where position indication is required -S models with auxiliary switches or damper blade switches will be provided per code requirements.Wiring DiagramsProvide overload protection and disconnect as required.45Actuators may be powered in parallel. Power consumption must be observed.75Ground present on some models.Meets cULus requirements without the need of an electrical ground connection.FSTF230 USOn/Off, Spring Return Fail-Safe, 230 VACD a t e c r e a t e d , 03/08/2019 - S u b j e c t t o c h a n g e . © B e l i m o A i r c o n t r o l s (U S A ), I n c .。
sg90舵机控制原理

sg90舵机控制原理概述SG90舵机是一种小型的电动舵机,具有体积小、重量轻、响应速度快的特点,常用于遥控模型、机器人、智能家居等应用中。
本篇文章将介绍SG90舵机的控制原理、工作原理、控制方法和优缺点。
一、工作原理SG90舵机的工作原理主要由电机、电子控制板和位置反馈器三部分组成。
当系统通过PWM信号控制电子控制板,电机内部的电机轴向上旋转或下旋转,以此产生转动机械上的输出轴,输出一定的转角位置。
位置反馈器会读取输出轴的角度位置信息,并将该信息反馈给电子控制板,从而实现闭环控制。
二、控制方法SG90舵机是一种采用PWM控制的电机,其PWM信号的频率通常为50Hz(即20ms的周期),其高电平的占空比一般在0.5ms至2.5ms间。
控制信号中高电平的宽度与输出角度呈线性关系,即高电平宽度长表示输出角度大,反之输出角度小。
当高电平宽度为0.5ms 时,输出角度为0度;当高电平宽度为1.5ms时,输出角度为90度;当高电平宽度为2.5ms时,输出角度为180度。
在控制SG90舵机时,需要注意控制信号的占空比范围不能超过SG90舵机的自身性能限制,否则会造成机械破坏或损坏电子元件。
三、优缺点SG90舵机相对于其他电机控制方式具有诸多优点,如:1. 体积小、重量轻,方便携带和安装。
2. 响应速度快,输出转角范围广,能够满足多种应用。
3. 使用简单,只需通过PWM信号控制即可实现闭环控制,不需要额外的传感器。
也存在一些缺点:1. 转矩较小,不能够承载大负载。
2. 精度较低,输出角度有误差,不能够满足高精度的应用。
3. 温度敏感,受到环境温度影响较大,需要进行温度补偿。
四、应用SG90舵机在遥控模型、机器人、智能家居等领域具有广泛应用。
在遥控飞机中,SG90舵机可用于控制舵面的运动,从而实现方向和高度的控制;在机器人中,SG90舵机可用于控制机械臂的转向和抬升;在智能家居中,SG90舵机可用于控制窗帘的打开和关闭。
CDS5500机器人舵机用户手册

2.3 应答包
应答包是 CDS55xx 对控制器的应答,应答包格式如下:
字头
ID 数据长度 当前状态 参数
校验和
0XFF 0XFF ID Length
ERROR
Parameter1 ...Parameter N Check Sum
返回的应答包包含舵机的当前状态 ERROR,若舵机当前工作状态丌正常,会通过这个 字节反映出来,每一位的代表的信息如下:
1.3.3 UART 接口原理图
CDS 系列机器人舵机用程序代码对 UART 异步串行接口迚行时序控制,实现半双工异 步串行总线通讯,通讯速度可高达 1Mbps,丏接口简单、协议精简。
在您自行设计的控制器中,用于和 CDS55xx 通讯的 UART 接口必须如下图所示迚行处 理。
TEL:+86-010-8211-4870, +86-010-8211-4887 FAX:Ext.828
体的集成伺服单元,主要用于微型机器人的关节、轮子、履带驱劢,也可用于其他简单位置
控制场合。CDS 55XX 的特点如下所示:
大扭矩:16Kgfcm
位置伺服控制模式下转劢范围 0-300°
高转速:最高 0.16s/60°输出转速
可设置为电机模式整周旋转,开环调速
宽电压范围供电
总线连接,理论可串联 254 个单元
校验和 0XDB
2.4.3 异步写指令 REG WRITE
REG WRITE 指令相似于 WRITE DATA,只是执行的时间丌同。当收到 REG WRITE 指
令帧时,把收到的数据储存在缓冲匙备用,并把 Registered Instruction 寄存器(Address
0x2c)置 1。当收到 ACTION 指令后,储存的指令最终被执行。
舵机的原理及应用
舵机的原理及应用舵机是一种能够控制角度的电机装置,被广泛应用在机器人、无人机、模型玩具和工业自动化等领域。
它的原理是通过接收控制信号来控制转动角度,并能够精确地停止在指定位置上。
舵机具有较高的精度和稳定性,广泛应用于需要精准控制角度的场景。
舵机的基本构成包括直流电机、减速机构、位置反馈装置和控制电路。
直流电机驱动减速机构,减速机构将电机输出的高速旋转转换为较慢的转动角度,位置反馈装置通过检测舵机的旋转角度,将检测到的角度信号反馈给控制电路进行控制。
控制电路会根据输入的控制信号和反馈信号来计算输出的控制信号,从而控制舵机的角度。
舵机内部一般还设有位置回中功能,可以使舵机自动回到中立位置。
舵机的控制信号采用脉宽调制(PWM)方式,通过控制信号的脉冲宽度来指定舵机的目标角度。
通常,控制信号的周期为20毫秒,脉冲宽度可以在1-2毫秒之间调节,1毫秒对应0度,1.5毫秒对应90度,2毫秒对应180度。
通过改变控制信号的脉冲宽度,可以实现舵机的连续旋转和精确控制角度。
舵机的应用非常广泛。
在机器人领域,舵机通常用于控制机器人的关节,实现机器人的运动和姿态调节。
在无人机中,舵机可以控制无人机的舵面和螺旋桨,实现飞行的平衡和姿态调整。
在模型玩具中,舵机可以控制汽车、船只和飞机的转向、舵面和腿部等运动。
在工业自动化中,舵机常用于精密定位和角度控制的机械设备。
此外,舵机还可以用于摄像头云台、遥控器控制、机械臂和医疗设备等领域。
舵机具有以下几大特点,使其能够广泛应用于各个领域。
首先,舵机能够精确控制角度,通常具有较高的分辨率。
其次,舵机具有控制方便、响应速度快的特点,能够在短时间内完成对目标角度的调整。
此外,舵机结构紧凑,体积小巧,重量轻,易于集成到不同的系统中。
在舵机的应用过程中,还需注意一些问题。
首先,电源电压要与舵机的额定电压匹配,过高或过低的电压都会对舵机的使用寿命和性能产生不良影响。
其次,使用舵机时要注意舵机的工作温度范围,避免在过高或过低的温度下使用舵机。
舵机的工作原理
舵机的工作原理舵机是一种常见的控制器件,广泛应用于机器人、遥控模型、自动控制系统等领域。
它通过接收控制信号来控制输出轴的位置,从而实现对机械装置的精确控制。
本文将详细介绍舵机的工作原理。
一、舵机的组成结构舵机主要由机电、减速器、位置反馈装置和控制电路组成。
1. 机电:舵机通常采用直流无刷机电,具有高效率、高扭矩和快速响应的特点。
2. 减速器:舵机内部的减速器用于降低机电转速并提高输出轴的扭矩。
常见的减速器类型有行星齿轮、蜗杆齿轮等。
3. 位置反馈装置:舵机内部配备了位置反馈装置,用于检测输出轴的位置。
常见的位置反馈装置有光电编码器、霍尔效应传感器等。
4. 控制电路:舵机的控制电路主要由微控制器和驱动电路组成。
微控制器负责接收控制信号并生成相应的PWM信号,驱动电路则将PWM信号转换为适合驱动机电的电流。
二、舵机的工作原理舵机的工作原理基于PWM(脉宽调制)信号的控制。
1. PWM信号:PWM信号是一种周期性的方波信号,其周期固定,而占空比可以调节。
占空比是指高电平信号在一个周期内的占比。
舵机通常使用50Hz的PWM信号,周期为20ms。
2. 控制信号:舵机的控制信号通过脉宽来表示。
通常情况下,脉宽范围为1ms到2ms,其中1ms表示最小角度,2ms表示最大角度。
舵机的中立位置通常为1.5ms。
3. 工作原理:当控制信号为最小脉宽时,舵机输出轴会转到最小角度位置;当控制信号为最大脉宽时,舵机输出轴会转到最大角度位置;当控制信号为中立脉宽时,舵机输出轴会停在中立位置。
4. 反馈控制:舵机的位置反馈装置会不断检测输出轴的位置,并将检测到的位置信号反馈给控制电路。
控制电路根据反馈信号来调整PWM信号的占空比,从而使输出轴保持在目标位置。
5. 可调范围:舵机的可调范围由减速器和位置反馈装置决定。
减速器的设计决定了输出轴的角度范围,位置反馈装置的精度决定了输出轴的精确度。
三、舵机的应用领域舵机由于其精确控制和快速响应的特点,广泛应用于各种领域。
舵机的说明TOROBOTRobotKits

舵机的说明TOROBOTRobotKits最近几年国内机器人开始起步发展,很多高校、中小学都开始进行机器人技术教学。
小型的机器人、模块化的机器人、组件式的机器人是教学机器人的首选。
在这些机器人产品中,舵机是最关键,使用最多的部件。
根据控制方式,舵机应该称为微型伺服马达。
早期在模型上使用最多,主要用于控制模型的舵面,所以俗称舵机。
舵机接受一个简单的控制指令就可以自动转动到一个比较精确的角度,所以非常适合在关节型机器人产品使用。
仿人型机器人就是舵机运用的最高境界。
一、舵机的结构舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
能够利用简单的输入信号比较精确的转动给定角度的电机系统。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文Servo。
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳。
金属外壳能够提供更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。
金属外壳也可以提供更牢固的固定位置。
齿轮箱有塑料齿轮、混合齿轮、金属齿轮的差别。
塑料齿轮成本底,噪音小,但强度较低;金属齿轮强度高,但成本高,在装配精度一般的情况下会有很大的噪音。
小扭矩舵机、微舵、扭矩大但功率密度小的舵机一般都用塑料齿轮,如Futaba 3003,辉盛的9g微舵。
金属齿轮一般用于功率密度较高的舵机上,比如辉盛的995舵机,在和3003一样体积的情况下却能提供13KG的扭矩。
舵机操作规程
舵机操作规程舵机是一种非常重要的电子元件,广泛应用于机器人、模型和其他自动化设备中,用于控制装置的角度或位置。
在进行舵机操作时,需要遵循一些操作规程,以确保设备的正常运作并防止操作失误造成的损害。
一、选择适当的舵机选择适当的舵机是非常重要的,因为不同的舵机具有不同的负载能力、工作范围和精度。
因此,在选择舵机时,需要考虑具体的应用需求,以确保其性能符合要求,并且可以实现准确的控制。
二、连接舵机在连接舵机时,需要注意以下事项:1. 确认舵机的电路和引脚连接正确无误。
2. 使用正确的电压输入,遵循舵机工作电压范围。
3. 避免长时间过载使用,以免电机过热和损坏。
4. 确定是单向运行还是双向运行。
5. 设备停止运转时,将舵机释放并设置到中立位置。
6. 建议使用负载均衡器来避免过载,这样可以在多个舵机运行时均衡负载。
三、控制舵机在控制舵机时,需要注意以下事项:1. 在操作时,遵循舵机的工作速度和加速度限制,以避免损坏舵机。
2. 避免瞬间改变舵机的方向和速度,以减少运行噪音和减少舵机的磨损。
3. 在使用舵机时保持操作手柄连续性,避免频繁的百叶窗效应。
4. 遵循操作手柄开关推进或回退浆数量,确保舵机的运行速度与船的运行速度相匹配。
5. 避免在舵机处于最大扭矩和速度的情况下停止运行,以免舵机和舵机电机过热,影响船的运行稳定性。
四、舵机的维护和保养在进行舵机的维护和保养时,需要注意以下事项:1. 定期清洁舵机,以减少尘埃和外部碎片的进入,避免机芯磨损和舵机电机加热和损坏。
2. 使用舵机时,避免受潮、过热、过载和挤压等因素,避免给舵机电机带来不必要的损坏。
3. 舵机机芯需要定期进行充油维护,保持机芯的灵活性和稳定性。
4. 定期校正舵机,以确保其精度和稳定性的长期维持。
5. 对有问题的舵机需要及时更换或维修,以避免将其假定为正常状态,并保证设备的正常运作。
在使用舵机时,必须注意安全,并深入理解舵机的工作原理和性能特点,以确保舵机的可靠性和精度。
舵机控制说明
舵机的分类按照舵机的转动角度分有180度舵机和360度舵机。
180度舵机只能在0度到180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度。
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。
关于PWM信号在3.4节将会介绍。
3.2 舵机的内部结构一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)。
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线。
其中电源线为舵机提供6V到7V左右电压的电源。
3.3 舵机的工作原理在舵机上电后,舵机的控制电路会记录由位置反馈电位计反馈的当前位置,当信号线接收到PWM信号时会比较当前位置和此PWM信号控制所要转到得位置,如果相同舵机不转,如果不同,控制芯片会比较出两者的差值,这个差值决定转动的方向和角度。
3.4 舵机的控制协议对舵机转动的控制是通过PWM信号控制的。
PWM是脉宽调制信号的英文缩写,其特点在于它的上升沿与下降沿的时间宽度或者上升沿占整个周期的比例(占空比)。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
本书介绍的舵机控制协议是北京汉库公司出品的舵机所采用的协议 ,市场上一些其他厂商(包括有些日本厂商)生产的舵机也采用这种协议。
如果你采用的是其它厂商的舵机,最好先参考下他们的DATA手册或者产品说明之类的技术文档。
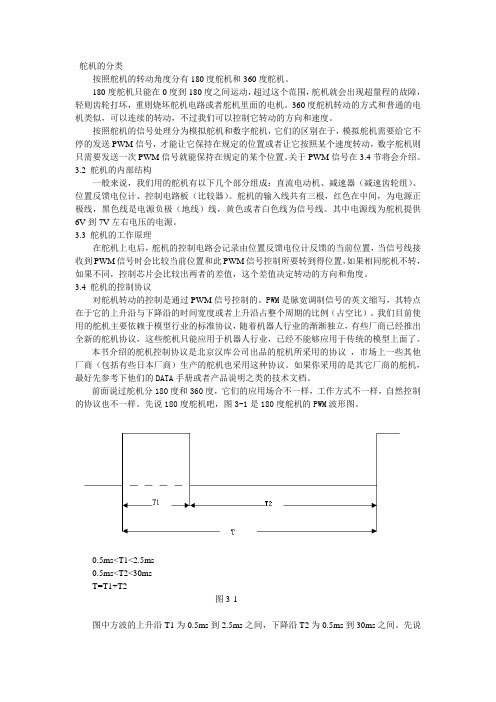
前面说过舵机分180度和360度,它们的应用场合不一样,工作方式不一样,自然控制的协议也不一样。
Yanmar 150S、150SR 水下扭簧机器人舵机 上海渔船发动机有限公司产品说明书
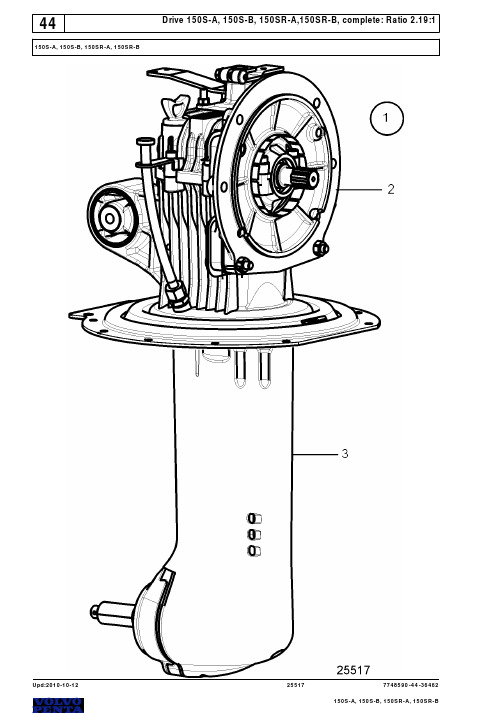
44Drive 150S-A, 150S-B, 150SR-A,150SR-B, complete: Ratio 2.19:1 150S-A, 150S-B, 150SR-A, 150SR-BDrive 150S-A, 150S-B, 150SR-A,150SR-B, complete: Ratio 2.19:144 150S-A, 150S-B, 150SR-A, 150SR-BREF PART NO.QTY DESCRIPTION SEE SEC.NOTES 138198651Sail drive Ratio 2.19:1 28883261Gear housing Ratio 2.19:17556 38896701Gear housing Ratio 2.19:1756244Upper Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:1150S-A, 150S-B, 150SR-A, 150SR-B262527632028191919301818185353532423515155122117112914312252213548896101615617624581605636595032484749523533433403937384143434442574546Upper Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:144 150S-A, 150S-B, 150SR-A, 150SR-BREF PART NO.QTY DESCRIPTION SEE SEC.NOTES 18883261Gear housing7565235865081Gear housing335867001Rubber bushing435825511Shift yoke Replaced by service kit 40005267400052671Gear changing unit, shift mechanism Includes shift mechanism 3849903, shaft 3849909 and fork 3593595.535824631Fork shaft Replaced by service kit 40005267635819731Plug735833221Sealing8948298X Shim TJ=0,10mm (3582566)948299X Shim TJ=0,15mm (3582567)3582568X Shim TH=0,20mm948300X Shim TH = 0,30mm, (3582569)3586724X Shim TH = 0,50mm3586728X Shim TH = 1,00mm935829221Cover1035825571Gasket119419074Spring washer129552944Hexagon screw139419076Spring washer149417616Hex. socket screw159419072Spring washer169592292Hex. socket screw1735867204Stud189419076Spring washer199557826Hexagon nut202Protecting cap2138076331Oil dipstick2235822031O-ring2338499031Shift mechanism2435825501Cover2538499131Engagement lever kit261Screw Included in kit.272Spring washer Included in kit.281Nut Included in kit.291Cam Included in kit.3035819661Sealing311Pin Included in kit.3235866461Faucet3335866491Nipple3435866471Sealing3535866511Faucet3635866501Nipple3735867011Tensioning ring38213890741Rubber bellows75843994167010Washer4094654110Hex. socket screw419252561O-ring4235840641Intermediate plate439443642O-ring449769941O-ring459416703Washer469465413Hex. socket screw4735833561Isolation plate4835833551Flange4935833611Insulating bushing5035833592Insulating washer5135833602Washer529709542Hexagon screw L=60mm539651854Flange screw L=40mm5435833581Insulating washer5535833571Insulating washer5635835392Plate5738431121Splined sleeve(3583492)5835863211Oil draining pipe5938076301Sealing6038076291Nipple6138076311Plug621O-ring Included in plug.6335867181Bracket44Upper Gear Unit Sail Boat Drive Unit 150S, 150SR, Components150S-A, 150S-B, 150SR-A, 150SR-B111110109977771666688554421213130322225242626131319191414291515282716161818231717202012121241343332353636373839404243Upper Gear Unit Sail Boat Drive Unit 150S, 150SR, Components44 150S-A, 150S-B, 150SR-A, 150SR-BREF PART NO.QTY DESCRIPTION NOTES 18883261Gear housing238435481Input shaft(3808936)335825912Key41838342Roller bearing535825712Thrust washer635829044Inner race735829054Needle bearing835829062Spacer ring935865582Ring1035865462Bushing113582908X Shim TH=0,10mm 3586721X Shim TH=0,15mm3582911X Shim TH=0,20mm3582910X Shim TH = 0,30mm3586723X Shim TH = 0,50mm1235865471Gear set13948298X Shim TJ=0,10mm (3582566) 948299X Shim TJ=0,15mm (3582567)3582568X Shim TH=0,20mm948300X Shim TH = 0,30mm, (3582569)3586724X Shim TH = 0,50mm3586728X Shim TH = 1,00mm1435865552Spacer1535829172Lock ring1635865572Disc spring1735865562End disc1835825772Lock ring1935825798Disc2035825788Disc213582872X Shim TH=0,15mm 3583430X Shim TH=0,20mm3583429X Shim TH = 0,30mm3582580X Shim TH=0,40mm3582581X Shim TH = 0,50mm3582582X Shim TH = 0,60mm3582583X Shim TH = 0,70mm2235942581Gear selector contro2335820243Torsion spring2435865321Plate Replaced by service kit 40005266 2535942671Guide sleeve2635825856Ball2735825903Spindle2835825883Spring2935825893Stop pin3035865251Guide sleeve Replaced by service kit 40005266 400052661Service kit, sliding sleeve3135865331Plate Replaced by service kit 40005266 323586725X Shim TH=0,10mm 3586726X Shim TH=0,15mm3582900X Shim TH=0,20mm3582901X Shim TH = 0,50mm3586727X Shim TH = 1,00mm3335828991Washer3438087171Screw3535888261Shaft36110412Roller bearing373586729X Shim TH=0,10mm 3582874X Shim TH=0,15mm3582875X Shim TH=0,20mm3586730X Shim TH = 0,50mm3586731X Shim TH = 1,00mm3835865091Spacer393586657X Shim TH=0,10mm 3586658X Shim TH=0,15mm3586659X Shim TH=0,20mm3586660X Shim TH = 0,30mm3582580X Shim TH=0,40mm4035867321Lock nut419552718Hexagon screw4235866761Splined sleeve4335866781Lock ring44Lower Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:1150S-A, 150S-B, 150SR-A, 150SR-B24655262677772521282731212232211991413154161819817102120Lower Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:144 150S-A, 150S-B, 150SR-A, 150SR-BREF PART NO.QTY DESCRIPTION NOTES 18896701Gear housing235844931Gear housing38897401Shaft48897361Inner ring5110412Roller bearing635866721Lock nut73586729X Shim TH=0,10mm 3582874X Shim TH=0,15mm3582875X Shim TH=0,20mm3586730X Shim TH = 0,50mm 3586731X Shim TH = 1,00mm 835863231Needle bearing935844211Gear set1038089381Nut118897421Propeller shaft121836472Roller bearing1335936632Sealing ring148896722O-ring1535840651Bearing housing169465412Hex. socket screw L=25mm 1738883051Anode kit, zinc38883061Anode kit, magnesium181Anode191Anode Left209636882Hex. socket screw L=40mm 2135828871Spacer2238545391Plug2338550811O-ring2435866931Gasket259637038Hex. socket screw OBSOLETE PART 2694167010Washer278549321Mounting kit(3583365) 289637002Hex. socket screwOverhaul Kits and Sealing Ring Kits: 150S, 150SR99 150S-A, 150S-B, 150SR-A, 150SR-BREF PART NO.QTY DESCRIPTION NOTES 135896871Sealing kit35819661Sealing35833221Sealing35822031O-ring35825571Gasket8897631Sealing ring35866472Sealing8896722O-ring35936632Sealing ring35866931Gasket9769941O-ring9443641O-ring9571751Gasket9252561O-ring35896861Disc kit35833221Sealing35820243Torsion spring35825662Shim35825672Shim35825692Shim35825772Lock ring35865562End disc35825712Thrust washer35825571Gasket213890741Rubber bellows1Rubber bellows1Cover plate9602381O-ring211124961Sealing ring kit35828961Locking wire L=700mm 9252561O-ring38568341Gasket211124971Sealing ring kit9252561O-ring9443642O-ring9769941O-ring35866931GasketTransmissions44DESCRIPTION SEE SEC.NOTESDrive 150S-A, 150S-B, 150SR-A,150SR-B, complete: Ratio 2.19:136462150S-A, 150S-B, 150SR-A, 150SR-B Upper Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:17556150S-A, 150S-B, 150SR-A, 150SR-B Upper Gear Unit Sail Boat Drive Unit 150S, 150SR, Components7565150S-A, 150S-B, 150SR-A, 150SR-B Lower Gear Unit Sail Boat Drive Unit 150S, 150SR: RATIO 2.19:17562150S-A, 150S-B, 150SR-A, 150SR-BRepair Kits99DESCRIPTION SEE SEC.NOTESOverhaul Kits and Sealing Ring Kits: 150S, 150SR7584150S-A, 150S-B, 150SR-A, 150SR-B150S-A, 150S-B, 150SR-A, 150SR-BREF DESCRIPTION SEE SEC. 44Transmissions4499Repair Kits99。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人舵机说明一、舵机简介舵机,顾名思义,大海航行靠舵手,舵机早期是应用在航模中控制方向的,在航空模型中,飞行器的飞行姿态是通过调整发动机和各个控制多面来实现的,后来有人发现这种机器的体积小、重量轻、扭矩大、精度高,由于具备了这样的优点,很适合应用在机器人身上作为机器人的驱动。
二、舵机的分类按照舵机的转动角度分有180度舵机和360度舵机。
180度舵机只能在0度到180度之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。
360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们可以控制它转动的方向和速度。
按照舵机的信号处理分为模拟舵机和数字舵机,它们的区别在于,模拟舵机需要给它不停的发送PWM 信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM 信号就能保持在规定的某个位置。
关于PWM 信号在3.4节将会介绍。
三、舵机的内部结构一般来说,我们用的舵机有以下几个部分组成:直流电动机、减速器(减速齿轮组)、位置反馈电位计、控制电路板(比较器)。
舵机的输入线共有三根,红色在中间,为电源正极线,黑色线是电源负极(地线)线,黄色或者白色线为信号线。
其中电源线为舵机提供6V 到7V 左右电压的电源。
图1 舵机的内部结构四、舵机的工作原理及控制方法4.1 舵机运动的对应关系在对机器人进行动作编程之前我们需要知道,机器人有许多个关节,每一个关节我们称为一个自由度。
一般的机体,都有十几个自由度,这样才能够保证动作的灵活性。
在机器人机体上,我们通常使用舵机作为每一个关节的连接部分。
它可以完成每个关节的定位和运动。
舵机的控制信号相对简单,控制精度高,反应速度快,而且比伺服电机省电。
这些优点是非常突出的。
在下面的论述中,会涉及到舵机相关的控制原理,读者应反复详细阅读。
舵机的外观入下图所示:图2 舵机外观这里可以看到,舵机体积十分小巧。
机器人使用它是非常合适的。
一般的舵机可以旋转185左右,我们这里留一些余量,算做180度。
八位单片机的精度是256,我们也留一些余量,算作250。
这样我们可以得到一个基本的对应关系:在程序中我们为舵机赋予不同的数值,舵机便能转动到对应的角度。
图3 舵机转动角度示意图舵机转动角度Φ:0-180度 单片机数值 N :0-2504.2 舵机工作原理1、舵机PWM信号定义PWM信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。
具体的时间宽窄协议参考下列讲述。
我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
目前,HG14-M舵机可能是这个过渡时期的产物,它采用传统的PWM协议,优缺点一目了然。
优点是已经产业化,成本较低,旋转角度大(目前所生产的都可达到185度);缺点是控制比较复杂,毕竟采用PWM格式。
但是它是一款数字型的舵机,其对PWM信号的要求较低:(1)不用随时接收指令,减少CPU的疲劳程度;(2)可以位置自锁、位置跟踪,这方面超越了普通的步进电机;图4其PWM格式注意的几个要点:(1)高电平最少为0.5mS,为0.5-2.5mS之间;(对应舵机旋转0-180度)(2) HG14-M数字舵机下降沿时间没要求,目前采用0.5Ms就行;也就是说PWM波形可以是一个周期1mS的标准方波。
2、PWM 信号控制精度制定上面已经提到了八位单片机,我们的舵机需要的是方波信号。
单片机的精度直接影响了舵机的控制精度,这里就详细的说明一下。
我们在这里做了一些名词上的定义。
DIV 是一个时间位置单位,一个DIV 等于8us ,关系入公式:实际寄存器内的数值为:(#01H )01 ———(#0FAH )250。
共185度,分为250个位置,每个位置叫1DIV 。
则:PWM 高电平函数: 0.5mS + N ×DIV0uS ≤ N ×DIV ≤ 2mS0.5mS ≤ 0.5Ms+N ×DIV ≤ 2.5mS根据这些知识,我们就可以开始编程,并做一些初步的实验了,学会舵机控制是研究机器人的一个比较技术手段,需要完全掌握。
4.3 单舵机的控制程序我们已经知道了舵机的工作与控制原理,我们现在可以通过一个简单的程序来控制单个舵机的运转。
如果您手头上有控制板和舵机,而且已经熟悉了KEIL 软件和STC 烧录软件,马上就可以试试了,如果您还不满足这些条件的话,也没什么关系,先来分析一下这段程序。
185÷250 = 0.74度 / DIV1 DIV = 8uS 250DIV=2mS图5延时程序:用于产生所需的PWM信号单舵机PWM 信号产生函数:上面函数的参数foot ,是控制舵机转动的度数,ΔΦ=foot*0.72(度),speed 控制的是舵机转动的速度。
4.4 多路舵机并行控制方法上一小节中比较详细的讲解了单舵机是怎么控制的,但是在机器人运动过程中,必须让多个舵机同时协作的运动,要想实现这个目标,我们必须有个精致的并行控制算法。
假设我们现在要控制8个舵机联动,并且这八个舵机所要到达的位置各不相同,我们应该怎么做呢?首先我们用逆向思维思考一下,假设这八个舵机的PWM 信号同时进入上升沿(既单片机上对应的八个输出引脚同时拉高),那么它们进入下降沿的时间顺序是怎样的呢?我们很容易知道舵机所要到达的位置与0度位置的夹角w 越小(既高电平宽度),它进入下降沿就越早,这一点不难理解。
假设我们机器人身上有8个舵机,它们要到达的位置参数(n 的值)分别是45,30,15,60,80,98,135,155,为了方便,我们将这些数存到一个取名为position 的数组里,既position[8]={45,30,15,60,80,98,135,155}。
为了使这八个舵机和单片机上相应的管脚对应起来,我们又设置了一个数组kouchu[8],初始化为kouchu[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f},为了方便起见,下面列了一个表格。
图6 单片机引脚对应数组图7 舵机控制理想输出波形-1我们将这八个舵机对应的数组position[8]各个元素从大到小排序,同时将数组kouchu[8]的各个元素也进行相应的调换,这样做的原因是不使单片机各引脚对舵机的对应控制关系不打乱,以前是怎么一一对应的,现在还是那样的对应,排序之后的列表如下:表2 舵机程序控制数据对照表-2图8 舵机控制理想输出波形-2通过对这一系列波形的观察,我们可以这样实现它,先将单片机上控制舵机的八路引脚电平同时间拉高,经过延时500+15*8(us)后,将position[7]对应的舵机信号输出引脚拉低,再经过(30-15)*8us 后拉低position[6]对应的舵机信号输出引脚,这样就依次求差延时,逐个拉低,知道所有的舵机都到达自己所要到达的位置。
这样的话,我们在对position[8]数组排序之后还要进行一个求差处理。
上面说的是8个舵机并行控制的原理,但在实际应用中,由于有些机器人身上的舵机数目远不止8个,所以写程序时还设置了一个paixu_ncha[8]数组,用来提供排序空间。
具体做法如下:第一步:定义数组第二部:给各个数组赋值为了方便起见,这里的position[24]的值是一组假设值。
表3 position[24]数据对照表表4 kouchu[8]数据对照表第三步:将position[24]中的数组前八个元素对应赋给paixu_ncha[8]数组。
赋值后paixu_ncha[8]各元素对应的值如下:kouchu[8]数组元素也做相应的调整。
排序后得到的结果列表如下:第五步:将paixu_ncha[8]数组作差处理相邻元素作差结果存入前面的元素中,最后一个元素保留原值不变。
处理后的结果如下:表8 paixu_ncha[8]数据对照表-4第六步:PWM 波形产生paixu_ncha[8]数组,然后重复上面的三到六步,做完后,再做16—23号元素,方法一样。
这段程序中“P1=P1&kouchu[7-i];”语句的作用就是通过位与运算将当前需要拉低的引脚拉低电平。
4.5 实用范例下面所示代码对应机器人源代码中的“pwm.h ”头文件(如图1-5),此段代码用于生成控制机器人舵机的PWM 脉冲。
1、为了简化代码的书写过程,我们将“unsigned char ”以及“unsigned int ”简化定义为“uchar ”和“uint ”。
2、下面所用于声明的延时函数源于“SCT12C5410AD(12MHZ).asm ”文件中定义,在此处声明以便于程序对于延时函数的调用。
这里我们提供了“8us ”、“500us ”、“500ms ”三种延时时长,若想获得更长的延时时间,只需通过循环函数增加延时次数以实现其效果。
图9 “pwm.h ”头文件位置5、根据动作需求控制舵机的运动。
6、根据动作需要将各端口输出通道按舵机目的位置的数值大小进行排序7、将排好序的数值进行N差计算,得出每相邻的两个数值间的差值,用于累计延时获得N×DIV动作要求高电平时长。
8、为舵机每一次动作提供间隔延时,用来控制其整体的动作速度。