13.光学弱相干成析成像(OCT)
光学相干断层成相(oct)项目意义
光学相干断层成相(oct)项目意义光学相干断层成像(Optical Coherence Tomography,简称OCT)是一种非侵入性的三维图像检测技术,具有广泛的应用前景。
该技术通过测量光学信号的干涉以获得目标组织的高分辨率横断面图像,用于观察和分析组织的内部结构和病变情况。
OCT项目的意义在于提供了一种高分辨率、无创伤的成像方法,可以用于临床医学、生物医学研究以及其他领域。
在临床医学中,OCT已被广泛应用于眼科、皮肤科、口腔科等领域。
以眼科为例,OCT技术可以实现对眼底、视网膜以及其他眼部组织的高分辨率成像,帮助医生准确定位和诊断眼部疾病。
与传统的眼底成像技术相比,OCT具有更高的分辨率和更快的成像速度,可以提供更多的细节信息,有助于医生进行疾病的早期诊断和治疗规划。
在生物医学研究中,OCT可以用于观察和研究不同组织的结构和功能。
例如,在神经科学研究中,OCT可以用于研究脑部组织的纤维束、神经元分布等结构特征,为研究者提供重要的解剖学信息。
在癌症研究中,OCT可以用于观察和监测肿瘤的生长和扩散过程,为癌症的早期诊断和治疗提供参考。
除了医学领域,OCT还可以应用于材料科学、艺术保护等领域。
在材料科学中,OCT可以用于观察材料的微观结构和缺陷,帮助研究者了解材料的性能和使用寿命。
在艺术保护领域,OCT可以用于观察和分析绘画、雕塑等艺术品的内部结构和破损情况,为艺术品的保护和修复提供指导。
总体而言,光学相干断层成像(OCT)项目的意义在于提供了一种高分辨率、无创伤的成像方法,可以在医学、生物医学研究以及其他领域中发挥重要作用。
通过OCT技术,我们可以观察和分析目标组织的内部结构和病变情况,为疾病的早期诊断和治疗提供依据,同时也为科学研究和艺术保护提供了有力的工具。
未来,随着技术的不断发展和改进,OCT在各个领域的应用前景将更加广阔。
光学相干层析技术
光学相干层析技术光学相干层析技术(Optical Coherence Tomography,OCT)是一种高分辨、无创、非侵入性的光学成像技术,主要用于生物医学和材料科学领域。
该技术通过测量光波的干涉,能够生成高分辨的三维组织结构图像,对组织的微观结构进行观察和分析。
以下是光学相干层析技术的主要原理和特点:原理:1.干涉原理:光学相干层析技术基于干涉原理,利用光波的干涉现象来获取样本内部结构的信息。
2.光源:一般使用窄带光源,如激光。
3.分束器:将光源发出的光分成两束,一束用于照射样本,另一束用作参考光。
4.光学延迟:样本内部的不同深度处反射回来的光与参考光发生干涉,形成干涉图案。
5.探测器:使用光谱探测器记录干涉信号。
特点:1.高分辨率:光学相干层析技术具有高分辨率,可达到微米级别,使得可以观察到生物组织和细胞的微观结构。
2.无创性:对于生物样本,OCT是一种无创性的成像技术,不需要对样本进行切割或注射对比剂。
3.实时成像:OTC具有实时成像的能力,适用于动态变化的生物过程的观察,如眼部结构的实时监测。
4.三维成像:通过对不同深度的光反射信号的采集,OCT可以生成三维组织结构图像,提供更全面的信息。
5.广泛应用:在医学上,OCT广泛应用于眼科学,用于视网膜和角膜等结构的成像;在材料科学中,用于观察材料内部的微观结构。
应用领域:1.眼科学:视网膜、角膜等眼部组织的高分辨成像。
2.心血管学:血管结构的成像,用于冠脉疾病的诊断。
3.皮肤学:皮肤组织的结构成像,用于皮肤病变的检测。
4.生物医学研究:对小动物器官和细胞的高分辨成像。
5.材料科学:对材料内部结构的观察,用于材料性能的研究。
总体而言,光学相干层析技术在医学和材料科学领域有着广泛的应用前景,为微观结构的研究提供了一种高效、精确的手段。
OCT(光学相干层析成像)原理
1993年,第一台商 用OCT系统上市。
2000年代以后, OCT技术逐渐拓展 到其他医学领域, 如皮肤科、妇科等。
OCT技术的应用领域
眼科
OCT技术广泛应用于眼科疾病 的诊断和治疗,如黄斑病变、
青光眼、白内障等。
皮肤科
OCT技术可以用于皮肤肿瘤、 皮肤炎症等疾病的诊断和治疗 。
妇科
OCT技术可以用于子宫颈癌、 卵巢癌等妇科疾病的诊断和治 疗。
感谢您的观看
OCT的层析原理
OCT通过测量反射光和透射光的干涉信号来获取样品的层 析结构。干涉信号的强度与参考光束和样品光束的光程差 有关,通过测量不同延迟时间下的干涉信号,可以重建样 品的层析结构。
OCT的层析过程通常采用频域OCT或时域OCT技术实现。 频域OCT通过快速扫描光学频率来获取干涉信号,而时域 OCT则通过快速扫描参考光束的延迟时间来获取干涉信号 。
03 OCT系统组成
光源模块
01
02
03
光源选择
OCT系统通常使用近红外 光波长的激光作为光源, 如800-1300nm波长范围。
光源输出功率
光源模块需要提供稳定的 输出功率,以保证OCT系 统的成像质量。
光谱特性
光源应具有较窄的光谱宽 度,以提高OCT系统的分 辨率。
扫描模块
扫描方式
扫描模块负责将光源发出 的光束扫描到待测样品上, 实现层析成像。
OCT图像的定量分析
厚度测量
OCT图像可以用于测量组织的厚度,通过对不同层次反射信号的 识别和测量,可以获得组织厚度的定量数据。
折射率计算
OCT设备通过测量光在组织中的传播速度,可以计算出组织的折射 率,这对于判断组织性质和生理状态具有重要意义。
OCT

1.论述光学相干层析成像(OCT)的基本原理及OCT测试的优缺点
光学相干层析成像(OCT)的基本原理:
OCT是由低相干光源,光纤迈克尔逊干涉仪和光电探测系统组成。
系统框图如下:
OCT技术的装置的核心是一个迈克尔逊干涉仪。
干涉仪的一臂是作精密扫描的参考反射镜,用以产生参考光。
干涉仪的另一臂放置待检测组织样品。
干涉成像的原理就是将光源发出的光经过2×2的光纤耦合器后,被均匀地分成两束,分别进入放有反射镜的参考臂和放有被测样品的样品臂。
照在样品上的光进入样品组织内部,经过样品反射回来的光信号随组织的性状而显示不同的强弱,把它与反射镜反射回来的参考光叠加,光波顶点一致时信号增强(增加相干),光波顶点相反时信号减弱(消减相干)。
利用相干原理,OCT干涉只发生在信号臂和参考臂长度相等时,所以改变反光镜的位置,就改变了参考臂的长度,就可得到不同深度的组织信号。
探测器把干涉后的光转换成电信号经过数据采集和处理系统收集,并在计算机上进行分析。
纵向扫描参考臂反射镜的位置,便可获得样品的深度层析图像。
光学相干层析成像(OCT)-OSA2010最新文章

Three-dimensional speckle suppression in optical coherence tomography based on the curvelettransformZhongping Jian1,*, Lingfeng Yu1, Bin Rao1, Bruce J. Tromberg1, and Zhongping Chen1,2 1Beckman Laser Institute, University of California, Irvine, California 92612, USA2z2chen@*zjian@Abstract: Optical coherence tomography is an emerging non-invasivetechnology that provides high resolution, cross-sectional tomographicimages of internal structures of specimens. OCT images, however, areusually degraded by significant speckle noise. Here we introduce to ourknowledge the first 3D approach to attenuating speckle noise in OCTimages. Unlike 2D approaches which only consider information inindividual images, 3D processing, by analyzing all images in a volumesimultaneously, has the advantage of also taking the information betweenimages into account. This, coupled with the curvelet transform’s nearlyoptimal sparse representation of curved edges that are common in OCTimages, provides a simple yet powerful platform for speckle attenuation.We show the approach suppresses a significant amount of speckle noise,while in the mean time preserves and thus reveals many subtle features thatcould get attenuated in other approaches.©2010 Optical Society of AmericaOCIS codes: (110.4500) Imaging systems: Optical Coherence Tomography; (110.6150)Imaging systems: Speckle Imaging; (100.2980) Image processing: Image Enhancement. References and links1. D. Huang, E. A. Swanson, C. P. Lin, J. S. Schuman, W. G. Stinson, W. Chang, M. R. Hee, T. Flotte, K. Gregory,C. A. Puliafito, and J. G. Fujimoto, “Optical Coherence Tomography,” Science 254(5035), 1178–1181 (1991).2. J. M. Schmitt, “Array detection for speckle reduction in optical coherence microscopy,” Phys. Med. Biol. 42(7),1427–1439 (1997).3. J. M. Schmitt, S. H. Xiang, and K. M. Yung, “Speckle in Optical Coherence Tomography,” J. Biomed. Opt. 4(1),95 (1999).4. A. Ozcan, A. Bilenca, A. E. Desjardins, B. E. Bouma, and G. J. Tearney, “Speckle reduction in optical coherencetomography images using digital filtering,” J. Opt. Soc. Am. A 24(7), 1901 (2007).5. D. L. Marks, T. S. Ralston, and S. A. Boppart, “Speckle reduction by I-divergence regularization in opticalcoherence tomography,” J. Opt. Soc. Am. A 22(11), 2366 (2005).6. D. C. Adler, T. H. Ko, and J. G. Fujimoto, “Speckle reduction in optical coherence tomography images by use ofa spatially adaptive wavelet filter,” Opt. Lett. 29(24), 2878–2880 (2004).7. M. Gargesha, M. W. Jenkins, A. M. Rollins, and D. L. Wilson, “Denoising and 4D visualization of OCTimages,” Opt. Express 16(16), 12313–12333 (2008).8. P. Puvanathasan, and K. Bizheva, “Speckle noise reduction algorithm for optical coherence tomography basedon interval type II fuzzy set,” Opt. Express 15(24), 15747–15758 (2007).9. S. H. Xiang, L. Zhou, and J. M. Schmitt, “Speckle Noise Reduction for Optical Coherence Tomography,” Proc.SPIE 3196, 79 (1997).10. Z. Jian, Z. Yu, L. Yu, B. Rao, Z. Chen, and B. J. Tromberg, “Speckle Attenuation by Curvelet Shrinkage inOptical Coherence Tomography,” Opt. Lett. 34, 1516 (2009).11. E. J. Candès, L. Demanet, D. L. Donoho, and L. Ying, “Fast Discrete Curvelet Transforms,” SIAM MultiscaleModel. Simul. 5(3), 861 (2006).12. E. J. Candès, and D. L. Donoho, “Curvelets–a surprisingly effective nonadaptive representation for objects withedges,” in Curves and Surface Fitting, C. Rabut, A. Cohen, and L. L. Schumaker, eds. (Vanderbilt University Press, Nashville, TN., 2000).13. E. J. Candès, and D. L. Donoho, “New tight frames of curvelets and optimal representations of objects withpiecewise C2 singularities,” Commun. Pure Appl. Math. 57, 219 (2003).14. J.-L. Starck, E. J. Candès, and D. L. Donoho, “The Curvelet Transform for Image Denoising,” IEEE Trans.Image Process. 11(6), 670–684 (2002).#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 102415. B. Rao, L. Yu, H. K. Chiang, L. C. Zacharias, R. M. Kurtz, B. D. Kuppermann, and Z. Chen, “Imaging pulsatileretinal blood flow in human eye,” J. Biomed. Opt. 13(4), 040505 (2008).16. S. G. Chang, B. Yu, and M. Vetterli, “Spatially adaptive wavelet thresholding with context modeling for imagedenoising,” IEEE Trans. Image Process. 9(9), 1522–1531 (2000).1. IntroductionOptical coherence tomography (OCT) has been undergoing rapid development since its introduction in the early 1990s [1]. It provides high resolution, cross-sectional tomographic images of internal structures of specimens, and therefore gains a wide variety of application in the field of biomedical imaging. Compared with other medical imaging modalities, 3D OCT has advantages in that it is non-invasive and it can acquire and display volume information in real time. However, due to its coherent detection nature, OCT images are accompanied with a significant amount of speckle noise, which not only limits the contrast and signal-to-noise ratio of images, but also obscures fine image features.Various methods have been developed to minimize the effect of speckle noise. Those methods can generally be classified into two categories: the first one performs noise attenuation by acquiring extra data, such as using spatial compounding and frequency compounding [2, 3]. While effective, this method generally requires extra effort to acquire data and cannot process images from standard OCT systems, and is therefore less preferred than the second category, which uses digital signal processing techniques to process images acquired with standard OCT systems. Different digital signal processing algorithms have been proposed, including for example enhanced Lee filter [4], median filter [4], symmetric nearest neighbor filter [4], adaptive Wiener filter [4], I-divergence regularization [5], as well as filtering in a transform domain such as the wavelet [4, 6–9]. Recently we described a speckle suppression algorithm in a transform domain called curvelets [10]. There we showed the curvelet representation of OCT images is very efficient, and with that, we significantly improved qualities of OCT images in the respects of signal to noise ratio, contrast to noise ratio, and so on.In almost all those algorithms, however, speckle reduction is performed on each image in a volume individually, and then all despeckled images are put together to form a volume. This process treats images as if they are independent from each other and therefore no relationship among different images is utilized, which is a waste of information provided by 3D OCT data. As many biological structures have layered structures not just in 2D, but also in 3D, and speckle noise is still random in 3D, we would expect that a despeckling algorithm based on 3D processing will be more powerful in attenuating noise and preserving features, especially those fine features across different images.There are a number of ways to do 3D processing, such as extending those two-dimensional filters mentioned above to three dimensional, or performing a 3D transform followed by processing in the transformed domain. The 3D transform can be, for example, the 3D wavelet transform, the 3D curvelet transform, or a hybrid one, such as a 2D curvelet transform of individual images followed by a one-dimensional wavelet transform along the perpendicular direction. Given the many superior properties of the curvelet transform, here we extend our earlier work of 2D curvelets to 3D, by performing the speckle attenuation in the 3D curvelet domain. We will first introduce some background information of the curvelet transform and its properties, then describe our algorithm in detail, and finally present the curvelet despeckling results tested on three-dimensional Fourier domain OCT images.2. Method2.1 Curvelet transformThe curvelet transform is a recently developed multiscale mathematical transform with strong directional characters [11–13]. It is designed to efficiently represent edges and other singularities along curves. The transform decomposes signals using a linear and weighted combination of basis functions called curvelets, in a similar way as the wavelet transform decomposes signals as a summation of wavelets. Briefly, the curvelet transform is a higher-#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1025dimensional extension of the wavelet transform. While the wavelet transform providesstructured and sparse representations of signals containing singularities that satisfy a variety of local smoothness constraints, including for example piecewise smoothness, they are unableto capitalize in a similar effective fashion on signals of two and more dimensions. The curvelet transform can measure information of an object at specified scales and locations and only along specified orientations. To achieve that, curvelets first partition the frequency plane into dyadic coronae, and (unlike wavelets) then subpartition the coronae into angular wedges [11]. Curvelets have time-frequency localization properties of wavelets, yet (unlike wavelets) also show a high degree of directionality and anisotropy. The curvelet transform is particularly suitable for noise attenuation, as it maps signals and noise into different areas in the curvelet domain, the signal’s energy is concentrated in a limited number of curvelet coefficients, and the reconstruction error decays rapidly as a function of the largest curvelet coefficients.The two-dimensional curvelets are, roughly speaking, 2D extensions of wavelets. Theyare localized in two variables and their Fourier duals (e.g., x-y and fx-fy), and are uniquelydecided by four parameters: scale, orientation, and two translation parameters (x,y)). There are several software implementations of the curvelet transform, and the one often used is the wrapping method of Fast Discrete Curvelet Transform (FDCT) [11]. The left of Fig. 1 shows a curvelet partitioning of fx-fy plane, where there are 6 scales, represented by the squares, and going from the inner to outer, the scale is j =1,2,3,…6. Each scale is further partitioned into a number of orientations, and the number doubles every other scale starting from the second (coarsest) scale. That is, going from the inner to the outer, the number of orientations is l=1, n, 2n, 2n, 4n, 4n… where n is the number of orientation at the second (coarsest) scale. This way, the directional selectivity increases for finer scales. The right side of Fig. 1 shows two example curvelets at the specific scales and orientations denoted by A and B in the partition diagram, respectively. Each curvelet oscillates in one direction, and varies more smoothly in the others. The oscillations in different curvelets occupy different frequency bands. Each curvelet is spatially localized, as its amplitude decays rapidly to zero outside of certain region. The directional selectivity of curvelets can be observed, for example, (A) is mainly along the horizontal direction while (B) is in another direction. This property can be utilized to selectively attenuate/preserve image features along certain directions.Fig. 1. Left: A schematic of the curvelet partitioning of fx-fy domain. The number of scales is6, and the number of orientations at the second scale is 8. Right: two example curvelets, shownfor the scale and orientation A and B, respectively. The curvelet A is along horizontaldirection, while B is along a dipping direction.The three-dimensional (3D) transform is very similar to the two-dimensional transform,except that each scale is defined by concentric cubes in the fx-fy-fz domain, and the division into orientations is performed by dividing the square faces of the cubes into sub-squares. Like in 2D transform, the number of orientations is specified for the second (coarsest) scale, which then determines the number of sub-squares in each direction. For example, a value of 8 orientations would lead to 64 sub-squares on each face. And since there are 6 faces to each cube, there would be a total of 384 orientations at that scale. The number of orientations doubles every other scale for finer scales, the same way as in the 2D transform.#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010(C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 10262.2 The despeckling algorithmThe curvelet-based despeckling algorithm consists of the following steps:I. A preprocessing step is first applied to the acquired data to compensate for the motionof the target during the data acquisition process. 3D OCT data is acquired image byimage, not obtained at one single shot. Although the scanning time can be quite short, the target can still move during that short time. The motion can have significant impact on acquired images. For example, it can seriously distort the shapeof the target, making the edge detection and other image analysis especially challenging. It can also make some continuous features across images not continuousany more, which would make the corresponding 3D curvelet transform coefficientssmaller than they should. Those smaller coefficients can then be attenuated duringthe despeckled process, which in turn, can lead to the loss of image features. Tominimize the impact of the motion, those features are first aligned in all directions.For example, for our acquired retina images, data are preprocessed based on the ideathat Retinal Pigment Epithelium (RPE) in neighboring images should be continuous,and blood vessels in fundus image should have minimal abrupt changes. The aligneddata is then further processed in the next steps.II. Take a logarithm operation of the aligned data. This is to convert the multiplicative noise into additive noise, as it is well known that speckles can be well modeled asmultiplicative noise. That is, log(s) = log(x) + log(z), where s is the measured data, xis the noise free signals to be recovered, and z is the speckle noise.III. Take the 3D forward curvelet transform of the data to produce the curvelet coefficients. The curvelet transform is a linear process, so the additive noise is stilladditive after the transform: S j,l,p = X j,l,p + Z j,l,p, where S j,l,p, X j,l,p, and Z j,l,p are thecoefficients for measured data, speckle-free signals, and speckle noise, respectively;j, l and p are parameters used for the curvelet transform, j is the scale, l is the orientation, and p is the spatial coordinates.IV. Selectively attenuate the obtained curvelet coefficients. A hard threshold T j,l is applied to each curvelet coefficients S j,l,p, so thatS = S j,l,p when |S j,l,p|>T j,l, and,,j l pS =0 when |S j,l,p|≤T j,l.j l p,,V. Take the inverse 3D curvelet transform of the attenuated curvelet coefficients to reconstruct despeckled data. The obtained data is in logarithm scale, so an exponential calculation of base 10 is applied to convert the despeckled data back tothe original linear scale when needed.In the process, one of the most important steps is the selection of the threshold T j,l, which determines to a large extent the performance of the algorithm. Here we use a simple yet powerful strategy called k-sigma method to set the threshold [14], in which T j, l=k×σ1×σ2, where k is an adjustable parameter, σ1 is the standard deviation of noise from a background region in the image data, and σ2 is the standard deviation of noise in the curvelet domain at a specific scale j and orientation l. By choosing a background region that does not have image features, one can directly compute the mean value and the standard deviation σ1. σ2, on the other hand, cannot be directly calculated from the forward curvelet transformed data, because the transformed data contain coefficients of not only noises, but also of image features, and it is not easy to separate them in the curvelet domain. One easier way to get σ2 is to simulate the noise data from the mean value and σ1, by assuming the noise has Gaussian distribution. Then the simulated data is transformed into the curvelet domain. The standard deviation σ2 at a specific scale and orientation can then be directly computed [14]. Although the noise in the background region may not be exactly the same as some speckle noises, the adjustable parameter k compensates that and the value of k can vary with scale and/or orientation. The#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1027larger k is, the more noise will be removed, and the best of its value can be determined by trial and error. To quantify the performance of the algorithm, we compute five quality metrics [6]: contrast-to-noise ratio (CNR), which measures the contrast between image features and noise,and defined to be 10log[()s b CNR μμ=−; equivalent number of looks (ENL),which measure the smoothness of areas that should be homogeneous but are corrupted by speckle noise, and defined to be 22/s s ENL μσ=, where μs and σs are the mean and standard deviation of a signal area, and μb and σb are the mean and standard deviation of a background noise area, respectively; peak signal to noise ratio (SNR), defined as 20log[max()/]SNR x σ=, where x is the amplitude data and σ is the noise variance of the background noise area; crosscorrelation (XCOR), which measures the similarity between theimages before and after denoising, and is defined as ,,,/m n m n m n XCOR s y =∑,where s is the intensity data before denoising, y is the intensity data after denoising, and m and n are the indexes of the images; and FWHM, the full width at half maximum, which measures the image sharpness. Both CNR and ENL are computed using log scale data, and are averaged over many areas. SNR and XCOR are computed using linear scale data. The value of XCOR is smaller than 1, and the larger XCOR is, the closer the denoised image is to the original image.2.3 Experimental setupThe image data is acquired by a Fourier domain OCT system [15]. The low-coherence light source has a center wavelength of 890nm and an FWHM bandwidth of 150nm. A broadband optical isolator was used to prevent optical feedback before light enters a 2 by 2 broadband fiber- coupler-based interferometer. Light at the reference arm was focused onto a reference mirror. The sample arm was modified from the patient module of a Zeiss Stratus OCT instrument. The detection arm was connected to a high performance spectrometer, which makes the system bench-top sensitivity of 100 dB with 650 μw light out of the sample-arm fiber and 50 μs CCD integration time. A 9 dB of SNR roll-off from 0 mm imaging depth to 2 mm depth was observed. The system speed was set to be 16.7 K A-lines/s, with its CCD A-line integration time being 50 μs and the line period being 60 μs. With the system, we acquired a 3D volume of human retina, with a lateral resolution of 7.8 μm and axial resolution of 4 μm.3. ResultsWe applied our algorithm to the acquired data. Figure 2 shows experimentally acquired cross-sectional images of human retina in three perpendicular planes: (a) x-y (B-scan), (b) x-z, and (c) y-z, respectively, where x is in the depth direction, y is perpendicular to x and is in the B-scan plane, z is perpendicular to both x and y directions and is the third dimension. Figure 3 shows the same images after being denoised by the 3D algorithm. For direct comparison, the images in two figures are shown on the same color scale and no pixel thresholding is applied. The background region, where there are no distinct image features, is the upper region in (a) and (b), as well as the middle and right noise region of (c). In obtaining the despeckled results, we have tested a number of combinations of parameters to perform the 3D curvelet transform, and the used values are: the number of scales is 3, and the number of orientations at the second coarsest scale is 16. A common threshold k=0.42 is used at all scales and orientations.(C) 2010 OSA 18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1028#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010Fig. 2. (color online) acquired cross-sectional retina images before denoising at differentplanes: (a) x-y plane (B-scan plane), (b) x-z plane along the vertical solid white line in (a), and(c) the cross-section image in the y-z plane along the horizontal solid white line in (a). Thewhite dotted lines in the figure indicate where the signals in Fig. 5 are shown.Fig. 3. (color online) the same images shown in Fig. 2, but after denoising, and shown on thesame color scale. The black arrow in (b) indicates the photoreceptor inner and outer segmentjunction that is preserved and made more distinct by the despeckling process. The two blackarrows in (c) indicate two yellow features that are preserved and made more distinct by thedespeckling process.Fig. 4. (color online) the cross section signals along the three white dot lines in Fig. 2, before(blue dotted) and after (red solid) denoising. The edge sharpness of the original image is wellpreserved in the denoising process. The denoising process also makes clearer the layeredstructure of the retina, as indicated by the more distinct peak values in the denoised signals.Much of the noise in the images has been reduced, which is most obvious in the background regions. To have a better comparison, Fig. 4 shows a one-dimensional cross-section of the image at the indicated white dotted line in Fig. 2, from images (a), (b) and (c),#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1029respectively. The despeckled signals are much cleaner than the original ones: the strong noise fluctuation in the original signals is attenuated, not only at the places where only noise resides, but also in other parts where noise is superimposed on the signals. And the attenuation of the speckle noise is achieved when the edge sharpness and image features of the original signal are both well preserved, demonstrating the ability of the algorithm in preserving signals while attenuating noise.The despeckling process makes some features of the object more obvious. For example, it is challenging, from the original signals (blue dotted lines) in Fig. 4 (a) and (b), to judge where the layered structure of the retina is, but it is much easier to do so from the denoised signals (red solid lines): the denoised signals, with the noised fluctuation removed, provide more distinct peaks and therefore the locations of the layered structure. This is especially useful for further automatic image analysis, as the less the ambiguity there is, the more accurate the results will be.Often times some image features are not distinct in a single image, but they are continuous across many neighboring images. In 2D despeckling, those weak image features tend to be attenuated with the speckle noise, as their amplitude and therefore transformed coefficients are close to those of noise. They, however, can be better preserved in 3D processing, as a three-dimensional curvelet transform would give relatively large coefficients for those continuous features across images than for randomly appeared speckle noise. An example is the two yellow features indicated by two black arrows in Fig. 3(c). They are easily discernible in the despeckled data, but can be barely observed from the image before despeckling. Another example is the photoreceptor inner and outer segment junction (IS/OS) indicated by the black arrow in Fig. 3(b), which is nicely continuous across images (along the direction of z) and distinct from its neighboring features, but the same feature is less distinct in the image before despeckling.To see this effect more clearly, Fig. 5 shows the same images in Fig. 2 denoised by 2D despeckling algorithm, where the threshold in the 2D algorithm [10] is chosen so that the crosscorrelation between Fig. 5(a) and Fig. 2(a) is the same as the crosscorrelation between Fig. 3(a) and Fig. 2(a). Not only the features indicated by the black arrows are more distinct and continuous in the 3D despeckling results, but also the layers of tissue where the white arrows reside in Fig. 5 are more preserved in the 3D results. The reason for this preservation difference is that these layers of tissue have the signals that are comparable to those of noise, as a result, when only a single image is despeckled in 2D despeckling, their transformed coefficients are close to those of noise and therefore can be attenuated easily. On the other hand, in 3D despeckling, because of the continuous features, the transformed coefficients are larger than those of noise and therefore are preserved better.Fig. 5. (color online) the same images shown in Fig. 2, but after denoising by the 2D curveletalgorithm. The features indicated by the black arrows are preserved and made more distinct bythe despeckling process, but to a less degree than the 3D algorithm. The layers of tissue wherethe white arrows reside are significantly attenuated, while those in 3D are largely preserved.#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1030The improvement of the image quality is also reflected in quality metric numbers. Table 1 lists the results of the quality metrics for three different thresholds of 3D method and one threshold for 2D method, and Fig. 6 shows the trend of SNR and crosscorrelation XCOR for more 3D thresholds. Comparing the original signal to the despeckled signal at threshold k=0.5, the signal to noise ratio is significantly increased by 32.59dB, the contrast to noise ratio is increased by 3.17dB, the sharpness, calculated based on the FWHM of the photoreceptor inner and outer segment junction (IS/OS) from the Fig. 4(b), is improved by 1.55 times, and the smooth region is more smooth after despeckling, with the equivalent number of looks increased by more than 3 times. All those are achieved when the crosscorrelation is 0.914. Although the number 0.914 might not seem ideal, as we have seen from Fig. 2, 3, and 5, the sharpness and features of the original images are still well preserved in the despeckled images.Table 1. Image Quality MetricsOriginal132.95 4.6430.4332.963D, k=0.40.91963.707.3794.3523.043D, k=0.50.91465.547.81102.9221.323D, k=0.60.91265.118.00181.4121.722D, k=0.50.91959.127.87169.6922.76Fig. 6. SNR and Crosscorrelation as a function of different threshold k in the 3D despecklingalgorithm. The algorithm improves the most SNR of 32.59 dB at k=0.5, and thecrosscorrelation between the original image and the despeckled image is 0.914. Thecrosscorrelation does not change much between k=0.6 and k=1.0, which demonstrates thecurvelet transform’s advantage in despeckling, as further explained in the text.With the increase of threshold k, as expected, SNR, CNR and ENL all increase while XCOR decreases. However, the signal to noise ratio does not always increase, instead it reaches the maximum of 65.54dB at k=0.5, then begins to drop to ~60dB at k=1.0, as shown in Fig. 6; the crosscorrelation decreases initially at small k values, and then it does not change significantly for k between 0.6 and 1.0. This is a very interesting phenomenon, as we would think the crosscorrelation should decrease all the time with increasing thresholds. It, however, is explainable and from another perspective, shows the advantage of processing in the curvelet domain; that is, curvelets provide a sparse representation so that most signal energy is concentrated in a limited number of curvelet coefficients, and the curvelet reconstruction error decays rapidly as a function of maximum curvelet coefficients. As a result, although increasing k leads to zeroing of more curvelet coefficients, so long as the threshold is not large enough to attack those limited number of major curvelet coefficients, an almost the same data can still be reconstructed and therefore the crosscorrelation does not vary much. Of course, increasing the threshold further would, eventually, lead to the loss of image features#118852 - $15.00 USD Received 21 Oct 2009; revised 14 Dec 2009; accepted 18 Dec 2009; published 7 Jan 2010 (C) 2010 OSA18 January 2010 / Vol. 18, No. 2 / OPTICS EXPRESS 1031。
光学相干断层扫描技术(OCT)介绍

4.可以对眼底的病变位置进行精确的定位,从而提高眼科疾病的诊治水平, 给眼科手术等高精的治疗手段提供准确的帮助。
5.可以对手术后的病体恢复情况进行准确的成像和检测,观察手术 后的效果和实时恢复状况。
正常黄斑部视网膜分层图像
ቤተ መጻሕፍቲ ባይዱ
几种常见的黄斑部病变扫描
五、总结
OCT技术以其非接触性和非 破坏性、有极高的探测灵敏度与 噪声抑制能力、高分辨率无损伤 和在体检测上对活体组织无辐射 等优越性以及造价低、结构简单 等优点,在材料科学和生物医学 等领域的无损检测方面有着重要 的应用价值和广阔的发展前景。
四、OCT检查的目的
1.眼科OCT检测仪可以对视网膜进行实时的断层成像和定量分析,可以有 效的对中心性浆液性视网膜脉络膜病变、糖尿病性视网膜病变、视网膜中 央动(静)脉阻塞、视网膜前膜病变等病理进行检查、定位和定量分析。 2.眼科OCT检测仪可以对视神经纤维层厚度分析及视神经乳头结构析,有 助于青光眼的早期诊断和治疗,这是其他检测技术很难达到的。 3.眼科OCT检测仪可以确切而直观的获得眼底断层信息,可以准确判断黄 斑裂孔、黄斑囊样水肿、老年性黄斑变性等疾病,并通过检验报告直观而 有力的反映出来。
三、OCT在眼科的应用
OCT是一种新的光学诊断技术,可进行活体眼组织 显微镜结构的非接触式、非侵入性断层成像。OCT是超 声的光学模拟品,但其轴向分辨率取决于光源的相干特 性,可达10um ,且穿透深度几乎不受眼透明屈光介质的 限制,可观察眼前节,又能显示眼后节的形态结构,在 眼内疾病尤其是视网膜疾病的诊断,随访观察及治疗效 果评价等方面具有良好的应用前景。
OCT专业全称又叫光学相关断层扫描。是最近几年 应用于眼科的新型技术。OCT是一种非接触、高分辨率 层析和生物显微镜成像设备。它可用于眼后段结构(包 括视网膜、视网膜神经纤维层、黄斑和视盘)的活体上 查看、轴向断层以及测量,是特别用作帮助检测和管理 眼疾(包括但不限于黄斑裂孔、黄斑囊样水肿、糖尿病 性视网膜病变、老年性黄斑变性和青光眼)的诊断设备。 OCT现在分为时域和频域两类,其实各有优缺点。时域 OCT性价比高,足以完成大多数眼底及青光眼疾病的检 查。而且技术比较成熟。
OCT技术

OCT技术 光学相干层析成像
(Optical Coherence Tomography)
1. OCT概念和原理 2.OCT仪器构成 3.数据采集与信号处理 4. 频域OCT 5. 应用案例
1、OCT概念和原理
OCT即光学层析成像技术:
利用弱相干光干涉仪的基本原理,检测生物组织不 同深度层面对入射弱相干光的背向反射或几次散射信号 通过扫描,得到生物组织二维或三维结构图像。 分两类: 时域OCT(TD-OCT);频域OCT(FD-OCT) 时域OCT是把在同一时间从组织中反射回来的光信号
与参照反光镜反射回的光信号叠加、干涉,然后成像。
频域OCT是参考臂的参照反光镜固定不动,通过改变
光源光波的频率来实现信号的干涉。
1、OCT概念和原理
超声的光学模拟品;
轴向分辨力:
取决于光源相干特性,可达10um
穿透深度: 几乎不受眼透明屈光介质的限制 可观察眼前节,
又能显示眼后节的形态结构。
多种扫描方式,可清晰呈现高度近视、白内障等患者的眼底影像。
• 扫描最快的 OCT,每秒 10万 次 A- 扫描 • 扫 描深 度 更 深,采 用 1050nm 的 高 穿 透 性不 可见 光,脉 络 膜与巩膜清 晰可见
• 可分辨视网膜 7 层结构,首次得到脉络膜厚度地形图
• 均匀的高清画质成像,最有最好的分辨率,白内障与出血下 也能高清成像 • 超宽扫描,线扫最长 12mm,3D 扫最大为 12mmX9mm
2. OCT仪器构成
由低相干光源,光纤迈克尔逊干涉仪和光电探测系 统组成。
2 OCT仪器构成
干涉仪: 一臂是作精密扫描的参考反射镜,产生参考光。 一臂放置待检测组织样品。 1.光源发出的光经过2×2的光纤耦合器后,被均匀地 分成两束,分别进入放有反射镜的参考臂和放有被测 样品的样品臂。
oct成像原理
oct成像原理OCT成像原理光学相干层析成像(OCT)是一种新型的无创成像技术,它采用光学干涉原理来检测样品中的光学反射率差异,从而实现对样品内部的高分辨率成像。
OCT成像原理是基于低相干光源发出的光波与样品中反射的光波之间的相干干涉,通过分析干涉信号的变化,实现对样品内部结构的成像。
OCT成像的基本原理是利用光的干涉原理,将样品的反射光与参考光合成干涉图像,从而获得样品的结构信息。
OCT成像系统主要由光源、分束器、样品和探测器等组成。
在OCT成像过程中,光源发出的光经过分束器,一部分光直接照射到探测器上,另一部分光通过光纤引导到样品上,并被样品反射回来,再经过分束器与参考光合成干涉图像,最后再由探测器进行信号采集和处理。
在OCT成像中,光源采用宽带低相干度的光源,例如超快激光器或白炽灯等。
由于样品具有不同的反射率和折射率,所以样品中的反射光和参考光存在相位差,这种相位差就是干涉信号的来源。
通过调整探测器的位置,可以改变参考光和样品反射光之间的相对相位,从而获得不同深度位置的干涉图像。
利用这些干涉图像,就可以重建出样品内部的三维结构。
OCT成像可用于各种医学和生物学应用,例如眼科、皮肤科、肺部成像、血管成像等。
在眼科应用中,OCT成像可以用于观察眼球内部结构,包括视网膜、玻璃体和视神经等。
在皮肤科应用中,OCT 成像可以用于诊断皮肤病变和观察皮肤内部结构。
在肺部成像应用中,OCT成像可以用于观察肺部内部结构和病变。
在血管成像应用中,OCT成像可以用于观察血管内部结构和病变,例如动脉粥样硬化和血管瘤等。
OCT成像原理是一种基于光学相干干涉原理的成像技术,它可以高分辨率地成像样品内部结构,广泛应用于医学和生物学领域。
未来随着技术的进步和应用范围的扩大,OCT成像技术将会在医学和生物学领域发挥更加重要的作用。
oct的名词解释(一)

oct的名词解释(一)OCT的名词解释1. OCT•全称:Optical Coherence Tomography(光学相干层析成像)•解释:OCT是一种非侵入性的光学成像技术,利用光学信号和反射干涉原理,获取高分辨率的组织结构图像。
•示例:OCT广泛用于眼科领域,可以检测眼底、视网膜和黄斑等眼部组织的异常情况。
2. 短波长OCT(SW-OCT)•解释:短波长OCT是一种特殊类型的OCT技术,它使用较短的光波,提供更高的图像细节和分辨率。
•示例:SW-OCT常用于皮肤科领域,可用于观察皮肤层次结构和诊断皮肤病变。
3. 超声导向OCT(USG-OCT)•解释:超声导向OCT结合了超声成像和OCT技术,可以同时获得结构图像和功能图像,有助于更精准地定位组织结构。
•示例:USG-OCT常用于心血管领域,用于评估血管病变和引导血管介入手术。
4. 频域OCT(FD-OCT)•解释:频域OCT是一种OCT图像采集和处理方式,通过分析光信号的频率、强度和相位信息,得到高分辨率的图像。
•示例:FD-OCT广泛应用于临床诊断领域,如眼科、牙科和皮肤科等,用于早期疾病检测和治疗方案制定。
5. 时间域OCT(TD-OCT)•解释:时间域OCT是OCT技术最早的实现方式,在实现频域OCT 之前,通过测量光在扫描杠杆上的时间延迟来获取图像信息。
•示例:TD-OCT在OCT技术起步阶段应用较广,后来被频域OCT所替代,但仍在某些领域有其应用,如牙科和皮肤科研究。
6. 模态转换OCT(MCOCT)•解释:模态转换OCT是一种OCT技术扩展,通过获取光学信号的多种模态信息,如弹性模态、声模态等,对组织进行全方位的评估。
•示例:MCOCT在生物医学领域被广泛研究,可以帮助识别和表征肿瘤、血管和其他组织类型的特征。
7. 谐振光子学OCT(RS-OCT)•解释:谐振光子学OCT结合了光子学谐振现象和OCT技术,利用共振增强效应提高信号强度和分辨率,以获得更清晰的图像。
光学相干层析成像技术原理及研究进展
光学相干层析成像技术原理及研究进展光学相干层析成像(Optical Coherence Tomography,OCT)是一种非侵入性的光学成像技术,通过测量光的相干性来实现高分辨率的断层成像。
OCT技术的原理是利用低相干光源,将分束器分成参考光束和样本光束,样本光束经过待检测物体后与参考光束进行干涉,通过相干性的测量,可以得到样本的深度和反射率信息,从而实现对物体内部结构的成像。
OCT技术可以应用于多个领域,包括医学、生物学和材料科学等。
在医学领域,OCT技术被广泛应用于眼科、血管学和皮肤学等领域。
例如,在眼科领域,OCT技术可以用于视网膜层析成像,实现对不同层次结构的观测,可提供疾病的早期诊断和监测。
在生物学研究中,OCT技术可以用于研究组织和器官的结构与功能,例如对小鼠脑皮质和大脑动脉结构的可视化观察。
随着技术的不断发展,OCT技术在分辨率和成像速度方面都取得了显著的提高。
首先,光源方面,传统的OCT技术使用连续波的光源,分辨率通常较低。
而近年来,光学频谱相干层析成像(Swept Source OCT,SS-OCT)和光学相干光谱层析成像(Fourier Domain OCT,FD-OCT)的出现,使得OCT技术的分辨率可以达到亚微米级。
其次,在成像速度方面,传统的OCT技术需要通过机械扫描来获取图像,速度较慢。
而多光束OCT技术的应用,可以实现对多个点的同时成像,大大提高了成像速度。
此外,OCT技术还与其他成像技术相结合,扩展了其应用领域。
例如,OCT与光学显微镜相结合,可以实现对样本的高分辨率实时观察。
OCT与光学斑点烧蚀成像技术相结合,可以实现对生物组织的三维成像和切割。
OCT与短波红外光谱(SWIR)相结合,可以实现对生物样本的多参数成像,如血液含氧量和血流速度的测量。
总之,光学相干层析成像技术在医学、生物学和材料科学等领域具有广阔的应用前景。
随着技术不断进步和完善,OCT技术的分辨率和成像速度将进一步提高,为更精细和快速的生物医学成像提供支持。
OCT原理

OCT原理光学相干层析成像(Optical Coherence Tomography,简称OCT)是一种基于低相干光源的光学显微技术,能够实现非侵入、无损的三维断层成像,由于其具有高分辨率、高敏感性、快速成像速度等优势,已广泛应用于医学、生物学、材料科学等领域,并取得了重要的成果。
OCT的原理基于光的干涉现象,通过分析光的反射和散射得到组织的反射率、反射膜的形态、组织的透明度等信息。
OCT利用一束低相干光源(通常使用类似于激光的光源)照射目标物体,光线经过组织反射回来,形成干涉光,然后通过一系列的光学元件进行分束、发射和接收。
在OCT技术中,使用Michelson干涉仪来实现光的干涉。
Michelson干涉仪由一个光源、一个分束器、二个反射镜和一个探测器组成。
光源发出的光经过分束器后,一部分光经过整个光学路径后与另一部分光相干叠加,形成干涉光。
干涉光通过分束器合并后,进入探测器,探测器将干涉光转换为电信号进行处理。
OCT的关键技术是使用光的相干性,从而实现高分辨率成像。
由于使用低相干光源,所以只有一小部分光可以相干叠加形成干涉光,这使得OCT成像具有优异的分辨率。
在OCT技术中,通过采集干涉光的强度和相位信息,可以恢复出目标物体的反射分布,从而实现高分辨率的成像。
OCT的成像原理可以分为两个步骤:扫描和信号处理。
在扫描过程中,通过移动光源和接收器来收集不同位置的反射和散射光信号。
然后通过信号处理,将收集到的信号用于构建三维断层成像。
在OCT成像中,扫描仪通常用于在样品表面扫描一个光束,然后通过反射和散射信号的强度和时间延迟来重建成像。
涉及到的信号处理算法通常包括傅立叶变换、信号滤波和重建算法等。
总的来说,OCT通过测量光的反射和散射信号的干涉,实现了高分辨率、非侵入、无损的三维断层成像。
该技术在医学领域中应用广泛,包括眼科、皮肤科、牙科等,用于早期疾病诊断和治疗监测,同时也在生物学和材料科学领域中具有重要的应用前景。
光学相干层析成像
光学相干层析成像光学相干层析成像(optical coherence tomography,简称OCT)是一种非侵入性的生物医学成像技术,主要应用于眼科和生物医学领域,用于观察和分析生物组织的内部结构和形态。
本文将从原理、应用和发展前景等方面介绍光学相干层析成像技术。
一、原理光学相干层析成像技术是基于光的干涉原理,通过测量光的干涉信号来获得样品的内部结构信息。
其基本原理是利用光学干涉来测量光的相位差,从而得到样品的深度信息。
具体而言,OCT系统会向样品发射一束光,一部分光被样品反射回来,另一部分光被参考光束反射回来。
通过对这两部分光进行干涉,测量两束光的相位差,就可以确定样品不同深度处的反射信号,从而重建出样品的内部结构。
二、应用1.眼科领域光学相干层析成像技术在眼科领域得到了广泛应用。
它可以高分辨率地成像眼部组织,如视网膜、角膜、虹膜等,用于早期诊断和治疗疾病,如黄斑变性、青光眼等。
同时,OCT技术还可以实时监测眼部手术过程,提高手术的安全性和准确性。
2.生物医学研究光学相干层析成像技术在生物医学研究中也发挥着重要作用。
它可以对小动物的器官、血管等进行高分辨率成像,用于研究疾病的发生机制和治疗效果评估。
此外,OCT技术还可以应用于药物研发过程中的毒性测试和药物吸收分布的研究。
三、发展前景随着技术的不断进步,光学相干层析成像技术在医学领域的应用前景十分广阔。
一方面,随着设备的不断改进,OCT系统的分辨率和成像速度将进一步提高,使得其在临床诊断中的应用更加广泛。
另一方面,光学相干层析成像技术与其他成像技术的结合,如光声成像、多光子显微镜等,将进一步拓展其应用领域,并为生物医学研究提供更多有价值的信息。
光学相干层析成像技术是一种非常有前景的生物医学成像技术。
它通过光的干涉原理,可以高分辨率地成像样品的内部结构,广泛应用于眼科和生物医学研究领域。
随着技术的不断发展,光学相干层析成像技术将为医学诊断和研究提供更多有力的支持,为人类健康事业做出更大的贡献。
oct的基础原理及临床应用
OCT的基础原理及临床应用1. OCT介绍光学相干层析成像(Optical Coherence Tomography,简称OCT)是一种通过测量光在组织中散射的原理来获取生物组织内部结构图像的无创成像技术。
OCT具有非接触、无需对组织进行切割的优点,被广泛应用于医学领域。
2. OCT的基本原理OCT的基本原理是利用光的干涉现象进行成像。
首先,OCT系统发射一束窄带光源,将光分为参考光和探测光。
通过一个光学器件将参考光和探测光同步传输到被测组织中。
当探测光与组织中散射的光混合后,会产生一个干涉图案。
通过改变探测光与参考光之间的光程差,可以获取组织内各个深度的反射信号,并通过信号的强弱来重建组织的截面图像。
3. OCT的临床应用3.1 眼科领域•视网膜病变的诊断:OCT可以实现对眼底组织的高分辨率成像,可以帮助医生诊断和治疗眼部疾病,如黄斑变性、玻璃体积血等。
•白内障手术的辅助:OCT可以提供眼球的截面图像,帮助医生评估白内障手术前后的角膜形态。
3.2 皮肤科领域•皮肤病变的诊断:OCT可以帮助医生观察和诊断皮肤病变,如皮肤癌、真菌感染等。
•皮肤术前定位:在皮肤手术前,OCT可以提供高分辨率的皮肤图像,帮助医生确定手术范围和传统皮肤切除的可行性。
3.3 心血管领域•冠心病诊断:OCT可以提供冠脉的横截面图像,帮助医生判断冠状动脉病变的程度,有助于冠心病的早期诊断和治疗。
•血管再狭窄监测:OCT可以实时监测支架植入后血管再狭窄情况,帮助医生及时调整治疗方案。
3.4 肺部领域•肺癌早期诊断:OCT可以帮助医生观察和诊断肺部病变,如肺癌、结核等。
•支气管镜下辅助:在支气管镜检查中,OCT可以提供高分辨率的支气管内壁图像,帮助医生观察病变情况。
4. 结语OCT作为一种新型的无创成像技术,具有广阔的应用前景。
在眼科、皮肤科、心血管领域以及肺部等多个医学领域,OCT都发挥着非常重要的作用,帮助医生提高诊断精确性和治疗效果,为患者提供更好的医疗服务。
光学相干断层成像术(OCT)在眼科临床检查中的应用

PRL (foveola)
90.44 7.85
92.83 7.43
-1.54 0.64
(175m)
88.38 6.79
90.29 7.38
-1.02 0.99
(750m)
70.06 9.74
71.21 11.09
-0.54 0.64
RPEL(foveola) 107.56 9.94
106.4610.15
• 中档反射层面(黄绿色) 内外丛状层 • 中心凹较薄
表1. 正常人黄斑区不同部位视网膜厚度(XSD,m)
距中央小凹175 m
距中央小凹750m
RNL
PRL
RPEL
RNL
PRL RPEL
鼻侧 155.59.8 89.17.1 105.08.2 250.013.0 71.910.3 106.29.5
颞 象 限 (μ m) 89.87 11.76 90.37 9.46
0.279
0.781
上 象 限 (μ m) 139.95 11.21 140.69 9.80
0.424
0.672
鼻 象 限 (μ m) 85.94 14.19 83.82 13.79
0.925
0.3 56
下 象 限 (μ m)
光学相干断层成像术 (OCT)在眼科临床
检查中的应用
简介
• OCT— 新旳影像学检验措施 • 非创伤性、非接触性 • 高辨别率横截面成像 • 图像直观、清楚 • 可进行微米级旳定量分析
原
理
• 类似B超,但使用光波
•
参照光
• 短脉冲光源
干涉物理现象 光敏探测仪
•
测量光 眼内组织
•
光学相干成像oct
光学相干成像oct
光学相干成像(OCT)是一种用于非侵入性显微镜观察生物组织
内部结构的技术。
它利用光的干涉性质来获取高分辨率的组织断层
图像,类似于超声成像,但是使用光而不是声波。
OCT技术可以在
不需要切割或染色样本的情况下提供高分辨率的组织结构图像,因
此在临床诊断和生物医学研究中具有重要意义。
OCT的工作原理是利用光的干涉效应。
它通过测量光波在样本
和参考镜之间的干涉图案来获取组织的反射率和光程差信息,从而
生成组织的断层图像。
OCT可以实现微米级的空间分辨率,使得可
以观察到细胞和组织结构的微观细节。
在医学领域,OCT被广泛应用于眼科学,用于检测和诊断眼部
疾病,如青光眼、黄斑变性等。
此外,OCT还可以用于其他器官的
成像,如皮肤、血管和牙齿等。
在临床诊断中,OCT可以提供高分
辨率的图像,帮助医生进行早期病变的诊断和监测疾病的进展。
除了医学应用,OCT还在生物医学研究中发挥着重要作用。
它
可以用于研究组织的微观结构和病理生理过程,为科学家提供了非
常有价值的研究工具。
此外,OCT还可以与其他成像技术结合使用,
如荧光成像和多光子显微镜等,以提供更全面的组织信息。
总之,光学相干成像(OCT)作为一种非侵入性、高分辨率的成像技术,在医学诊断和生物医学研究中具有广泛的应用前景。
它不仅可以帮助医生进行早期疾病诊断,还可以为科学家提供重要的研究工具,推动生物医学领域的发展。
光学相干层析技术

光学相⼲层析技术1.光学相⼲层析技术(OCT)2006年,珠宝界⾸次引进OCT技术,将全世界第⼀台近红外珍珠⽆损成像检测仪,经过4代样机的发展,⽣产出了现在的光学相⼲层析仪,分辨⼒⾼的0.015mm,据样品性质不同,其实测深度不同。
2.1基本原理图3:光学相⼲层析成像的实质是基于近红外光低相⼲⼲涉的扫描成像。
其原理如图1 所⽰,它的核⼼是迈克尔逊⼲涉仪。
光源产⽣的弱相⼲光(近红外光,如1310nm)发出的光经耦合透镜OL1 注⼊⼀个2×1光纤耦合器FC1;同时指⽰光源发出的可见光(红光)注⼊另⼀2×1 光纤耦合器FC3;FC1 和FC3 再接⼊⼀2×2 光纤耦合器FC2(1:1),在这⾥被分为两束:⼀束参考光和⼀束信号光。
其中⼀束为参考光束出射后经准直到参考臂快扫描光学延时线被平⾯镜反射,,另⼀束出射后经过扫描装置进⼊待测量的样品后有⼀定的穿透深度,同时样品⾃其表⾯开始的不同深度各个层⾯对此光束都有⼀定的背向反射。
这样,两束来⾃参考臂的反射光和样品的背向反射光再次进⼊光纤,并在2×2 耦合器FC2 相遇发⽣⼲涉叠加。
叠加后的光场被分束并经过FC1、FC3 到达其另⼀端,其强度信号被探测器D1、D2 所测量。
光源的弱相⼲性将导致振镜的扫描可以选择性地测量与其光程相匹配的来⾃组织样品不同层⾯的反射光。
同时当振镜平移扫描时,将产⽣对⼲涉信号的多普勒频率调制。
于是两路⼲涉信号经过两个光电转换器后,进⾏差分放⼤、滤波、解调及模数转换。
振镜⼀次扫描,即可检测出组织样品单点反射光强随深度的⼀维分布。
进⽽在样品臂振镜对组织样品进⾏横向扫描就可以得到X-Z 平⾯的⼆维图像。
最后通过采集卡采集信号输⼊计算机,获得扫描点的⼲涉强度信息。
所得信息经过软件处理后得到我们需要的OCT 图样。
光学相⼲层析成像的实质是基于近红外光弱相⼲⼲涉的扫描成像。
其原理如图3所⽰;OCT技术可检测被测物不同深度层⾯对⼊射弱相⼲光的背向散射信号,通过扫描及软件处理,可得到被测物⼆维或三维结构图像。
光学相干层析成像技术在医学中的应用

光学相干层析成像技术在医学中的应用第一章:引言光学相干层析成像技术(Optical Coherence Tomography,简称OCT)是一种非常重要的光学成像技术。
该技术利用光的干涉原理,可以对物体进行非侵入式高分辨率成像。
OCT技术可以用于医学、生物学、材料科学等领域的研究,同时也是许多医学领域中常用的一种成像技术之一。
本文将重点介绍OCT技术在医学领域中的应用。
第二章:OCT技术概述OCT技术是一种基于光的非接触式成像技术,它利用光的干涉原理,对物体进行探测和成像。
OCT技术最早应用于眼科领域,用于对视网膜进行成像。
OCT技术在医学领域的应用范围已经远远超出了眼科领域。
基本的OCT系统由光源、光纤、光路分束器、样品、探测器和计算机组成。
光源发出的光被分成两束,一束经过光路分束器反射到样品上,另一束经过光路分束器直接到达探测器上。
样品反射回来的光和直接到达探测器的光干涉产生干涉信号,通过信号处理,就可以得出样品内部的结构和组织。
第三章:OCT技术在眼科中的应用OCT技术最早应用于眼科领域,用于对视网膜进行成像。
OCT 技术可以通过非侵入的方式对眼部进行成像,可以实现高分辨率的三维成像。
OCT技术广泛应用于青光眼、白内障、黄斑变性等眼科疾病的诊断和治疗监测。
OCT技术在角膜疾病的诊断中也有广泛应用。
OCT技术可以实现角膜的全面成像,可以准确的评估角膜病变的程度。
例如,OCT技术可以用于非侵入性评估角膜前部的各种疾病状态,如干眼症、前房角炎、青光眼、角膜移植等。
同时,OCT技术也可用于眼底成像,对于糖尿病视网膜病变、视网膜色素变性、脉络膜病变等疾病的非侵入性测量和定量分析有很大的帮助。
第四章:OCT技术在皮肤病诊断中的应用OCT技术可以在皮肤表面进行成像,并通过高分辨率的成像技术来观察皮肤结构的情况,分析皮肤病的病变情况和深度。
基于OCT技术的皮肤成像可以用于各种皮肤病的诊断和治疗监测。
例如,血管瘤是一种常见的皮肤病,常出现在面部、颈部、四肢等部位。
光学相干层析成像技术
光学相干层析成像技术一、概述光学相干层析成像技术(Optical Coherence Tomography,OCT)是一种非侵入性、无创伤的三维成像技术。
它利用光学相干性原理,通过测量光的干涉信号来获取样品内部的反射率信息,从而实现对样品的高分辨率成像。
二、原理光学相干层析成像技术基于光学相干性原理,即当两束光线在空间和时间上保持相干时,它们会产生干涉现象。
OCT系统中采用低相干度的光源(如超快激光),将其分为两束,一束照射到样品上,另一束照射到参考镜面上。
样品内部不同深度处反射回来的光经过合并后形成干涉信号,并通过Fourier变换得到深度信息。
通过扫描样品和参考镜面之间的距离,可以得到整个样品内部的三维结构信息。
三、系统组成OCT系统主要由以下几个部分组成:1. 光源:采用超快激光作为光源,通常使用波长在800nm左右的近红外激光。
2. 光学系统:包括光路分束器、扫描镜、物镜等光学元件,用于将光束分为参考光和探测光,并将探测光聚焦到样品内部。
3. 探测器:用于检测干涉信号,并转换为电信号输出。
4. 信号处理系统:对探测器输出的信号进行放大、滤波、数字化等处理,然后进行Fourier变换得到深度信息。
5. 显示系统:将得到的三维结构信息以图像或视频的形式显示出来。
四、应用领域OCT技术在医学、生物科学和材料科学等领域都有广泛的应用。
其中,在眼科领域中,OCT技术已经成为常规诊断工具之一,可以实现对视网膜和角膜等眼部组织的高分辨率成像。
在生物科学领域中,OCT技术可以实现对小鼠胚胎和其他生物样品的三维成像。
在材料科学领域中,OCT技术可以实现对金属、陶瓷等材料内部结构的非破坏性检测。
五、发展趋势随着硬件和软件技术的不断进步,OCT技术在分辨率、成像速度、深度范围等方面都有了显著的提高。
同时,OCT技术也在不断拓展应用领域,如在神经科学、皮肤科学、牙科学等领域中的应用也越来越广泛。
未来,随着OCT技术的不断发展,它将会成为更多领域中的重要工具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
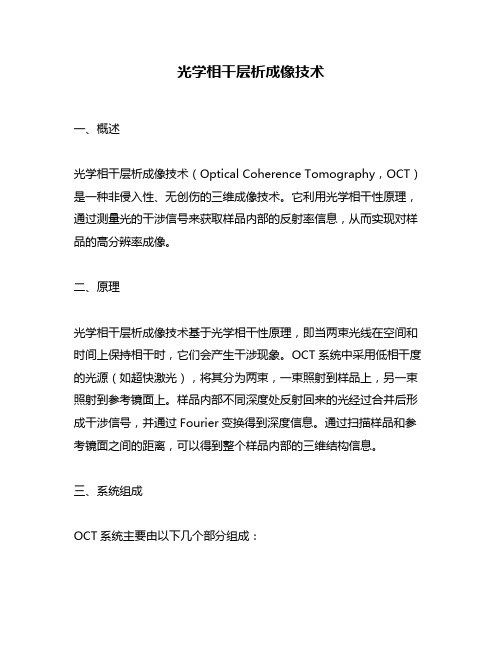
OCT原理图
样品的分层结构模型
两层间的光程差: ΔL=2nΔd 相干条件:2nΔd <= l
OCT系统的纵向分辨率: Δd = l/2n 层1 入射光束 光源相干长度l 层2 层1反 射光 层2反 射光
Δd
光学外差探测原理图
光学外差探测原理图
光学外差探测频谱分析
I = Ka 0 a 1 cos( Δ ω t + Δ ϕ )
光学弱相干层析成像技术 Optical Coherence Tomography
主要内容
OCT概况 OCT基本原理 典型应用 ODT-光学多谱勒层析成像
光学弱相干层析成像-OCT
光束聚焦入组织后,用干涉测量法可测量到 不同深度内部微结构所反射的光的时间延迟 当光束扫过组织时,在不同的横向位置重复 进行轴向测量,从而获得图像信息,组成二 维后向散射或反射图像,该图像反映了组织 内部结构形态和细胞结构。
sdfd
OCT发展与应用
透明组织成象 --非透明组织成象 离体组织成象 -- 活体组织成象 OCT技术将会在三个方面获得重要应用:
对存在危险因素的生物组织的医疗诊断 高失检率的疾病的准确诊断 指导精微手术,如修复血管和外围神经
提供参考光
令参考光臂的反射镜以一定速度运动,在参 考光的频率上附加一个频率变化,提供差频 该频率也是我们检测时带通滤波器的中心频 率
提供参考光_Doppler效应
v ω1 =ω0(1−v/ c) ω2 = ω0(1+ ) c
典型应用
牙OCT 内窥镜OCT 眼科OCT
牙齿的普通X-ray照片
宏观结构
角膜的高解析度OCT图像
光学多谱勒层析成像
动脉血管血流动力学与血管结构
静脉血管血流动力学与感光学弱相干层析成像技术(PSOCT)融合了OCT和椭圆偏振光干涉仪技术, 可以完全的刻画混浊介质背向散射光的偏振 状态 该技术可被应用于热作用对生物组织结构和 偏振特性影响的成像观察和研究,
牙齿的釉面 牙髓 牙根等
裂缝处龋齿损伤的OCT图像
裂缝处龋齿损伤的OCT图像
正 常 与 炎 症 组 织 比 较
眼OCT图像
lens lens
cornea cornea
Rabbit Eyeball OCT Image
canthus
眼底OCT信号
ILM为内限制隔膜 GCL为神经节细胞层 RPE为视网膜色素上 皮细胞 CH1为脉络膜1 CH2为脉络膜2
光学层析成像
几何光学层析成像 衍射层析成像 时间分辨率层析成像
几何层析成像原理图
衍射层析成像
时间分辨层析成像
几何层析
分光片 远场近似下的 平行光
物体
a.
光阑 光电探测器
Michelson干涉仪的原理图
source
sample
detector
OCT设计
分辨率--弱相干光源(相干长度短) 灵敏度--外差探测
OCT特点
集共焦、弱相干、光外差及扫描层析成像等 技术的优点
高分辨率10~15μm 高灵敏度(>100db) 非侵入的无损探测 快速(ps)、实时的活体(in vivo)测量
OCT发展史
1991,David Huang,J.G.Fujimoto 等获得离体的 人眼视网膜和冠状动脉的二维灰度图象 1993,E.A.Swanson等直接对活体视网膜成象 1997, Z. P.Chen等提出光学多普勒层析成象 G.J.Tearney等利用小型化的光纤探头,采用内窥镜 技术,进行兔子食道的体内成象 J. F. de Boer等提出 Polarization-sensitive OCT 1998,Mark E. Brezinski和J. G. Fujimoto由于 在OCT的眼科成象上的突出贡献,而被白宫授予国 家科学技术委员会总统早期成就奖