PCB设计规范标准化满足六轴机械手焊锡机器人焊接要求-2017-2-9
PCB板焊接工艺标准(通常规范标准)

-* PCB板焊接工艺(通用标准)1.PCB板焊接的工艺流程1.1 PCB板焊接工艺流程介绍PCB板焊接过程中需手工插件、手工焊接、维修和查验。
1.2 PCB板焊接的工艺流程按清单归类元器件—插件—焊接—剪脚—检查—修整。
2.PCB板焊接的工艺要求2.1 元器件加工办理的工艺要求元器件在插装以前,一定对元器件的可焊接性进行办理,若可焊性差的要先对元器件引脚镀锡。
元器件引脚整形后,其引脚间距要求与PCB板对应的焊盘孔间距一致。
元器件引脚加工的形状应有益于元器件焊接时的散热和焊接后的机械强度。
2.2 元器件在 PCB板插装的工艺要求元器件在PCB板插装的次序是先低后高,先小后大,先轻后重,先易后难,先一般元器件后特别元器件,且上道工序安装后不可以影响下道工序的安装。
元器件插装后,其标记应向着易于认读的方向,并尽可能从左到右的次序读出。
有极性的元器件极性应严格依据图纸上的要求安装,不可以错装。
元器件在PCB板上的插装应散布平均,摆列齐整雅观,不一样意斜排、立体交错和重叠摆列;不一样意一边高,一边低;也不一样意引脚一边长,一边短。
2.3 PCB板焊点的工艺要求焊点的机械强度要足够焊接靠谱,保证导电性能焊点表面要圆滑、洁净3.PCB板焊接过程的静电防备 3.1 静电防备原理对可能产生静电的地方要防备静电累积,采纳举措使之控制在安全范围内。
对已经存在的静电累积应快速除去掉,即时开释。
3.2 静电防备方法泄露与接地。
对可能产生或已经产生静电的部位进行接地,供给静电开释通道。
采纳埋地线的方法成立“独立”地线。
非导体带静电的除去:用离子风机产生正、负离子,能够中和静电源的静电。
4.电子元器件的插装电子元器件插装要求做到齐整、雅观、坚固。
同时应方便焊接和有益于元器件焊接时的散热。
4.1元器件分类按电路图或清单将电阻、电容、二极管、三极管,变压器,插排线、座,导线,紧固件等归类。
4.2元器件引脚成形元器件整形的基本要求全部元器件引脚均不得从根部曲折,一般应留 1.5mm以上。
PCB工艺的设计规范标准[详]
![PCB工艺的设计规范标准[详]](https://img.taocdn.com/s3/m/dacf9c32d4d8d15abf234e7a.png)
xxxxxxxxx企业技术规PCB工艺设计规目次前言 (11)1围和简介 (13)1.1围 (13)1.2简介 (13)1.3关键词 (13)2规性引用文件 (13)3术语和定义 (13)4PCB叠层设计 (14)4.1叠层方式 (14)4.2PCB设计介质厚度要求 (15)5PCB尺寸设计总则 (15)5.1可加工的PCB尺寸围 (16)5.2PCB外形要求 (17)6拼板及辅助边连接设计 (18)6.1V-CUT连接 (18)6.2邮票孔连接 (19)6.3拼板方式 (20)6.4辅助边与PCB的连接方法 (22)7基准点设计 (24)7.1分类 (24)7.2基准点结构 (24)7.2.1拼板基准点和单元基准点 (24)7.2.2局部基准点 (24)7.3基准点位置 (25)7.3.1拼板的基准点 (25)7.3.2单元板的基准点 (26)7.3.3局部基准点 (26)8器件布局要求 (26)8.1器件布局通用要求 (26)8.2回流焊 (28)8.2.1SMD器件的通用要求 (28)8.2.2SMD器件布局要求 (29)8.2.3通孔回流焊器件布局总体要求 (31)8.2.4通孔回流焊器件布局要求 (31)8.2.5通孔回流焊器件印锡区域要求 (31)8.3波峰焊 (32)8.3.1波峰焊SMD器件布局要求 (32)8.3.2THD器件布局通用要求 (34)8.3.3THD器件波峰焊通用要求 (35)8.3.4THD器件选择性波峰焊要求 (35)8.4压接 (39)8.4.1信号连接器和电源连接器的定位要求 (39)8.4.2压接器件、连接器禁布区要求 (40)9孔设计 (43)9.1过孔 (43)9.1.1孔间距 (43)9.1.2过孔禁布设计 (43)9.2安装定位孔 (43)9.2.1孔类型选择 (43)9.2.2禁布区要求 (44)9.3槽孔设计 (44)10走线设计 (45)10.1线宽/线距及走线安全性要求 (45)10.2出线方式 (46)10.3覆铜设计工艺要求 (48)11阻焊设计 (49)11.1导线的阻焊设计 (49)11.2孔的阻焊设计 (49)11.2.2测试孔 (49)11.2.3安装孔 (49)11.2.4定位孔 (50)11.2.5过孔塞孔设计 (50)11.3焊盘的阻焊设计 (51)11.4金手指的阻焊设计 (52)11.5板边阻焊设计 (52)12表面处理 (53)12.1热风整平 (53)12.1.1工艺要求 (53)12.1.2适用围 (53)12.2化学镍金 (53)12.2.1工艺要求 (53)12.2.2适用围 (53)12.3有机可焊性保护层 (53)12.4选择性电镀金 (53)13丝印设计 (53)13.1丝印设计通用要求 (53)13.2丝印容 (54)14尺寸和公差标注 (56)14.1需要标注的容 (56)14.2其它要求 (56)15输出文件的工艺要求 (56)15.1装配图要求 (56)15.2钢网图要求 (56)15.3钻孔图容要求 (56)16背板部分 (56)16.1背板尺寸设计 (56)16.1.1可加工的尺寸围 (56)16.1.3开窗和倒角处理 (57)16.2背板器件位置要求 (58)16.2.1基本要求 (58)16.2.2非连接器类器件 (58)16.2.3配线连接器 (58)16.2.4背板连接器和护套 (60)16.2.5防误导向器件、电源连接器 (61)16.3禁布区 (63)16.3.1装配禁布区 (63)16.3.2器件禁布区 (63)16.4丝印 (66)17附录 (67)17.1“PCBA 五种主流工艺路线” (67)17.2背板六种加工工艺 (68)17.3其它的特殊设计要求 (70)18参考文献 (71)图1左右插板示意图 (14)图2PCB制作叠法示意图 (14)图3对称设计示意图 (15)图4PCB外形示意图 (16)图5PCB辅助边设计要求一 (16)图6PCB辅助边设计要求二 (17)图7PCB辅助边设计要求三 (17)图8PCB外形设计要求一 (17)图9PCB外形设计要求二 (18)图10V-CUT自动分板PCB禁布要求 (18)图11自动分板机刀片对PCB板边器件禁布要求 (19)图12V-CUT板厚设计要求 (19)图13V-CUT与PCB边缘线路/pad设计要求 (19)图14邮票孔设计参数 (20)图15铣板边示意图 (20)图16L形PCB优选拼板方式 (20)图17拼板数量示意图 (21)图18规则单元板拼板示意图 (21)图19不规则单元板拼板示意图 (21)图20拼板紧固辅助设计 (22)图21金手指PCB拼板推荐方式 (22)图22镜像对称拼板示意图 (22)图23辅助边的连接长度要求 (23)图24不规则外形PCB补齐示意图 (23)图25PCB外形空缺处理示意 (24)图26基准点分类 (24)图27单元MARK点结构 (24)图28局部MARK点结构 (25)图29正反面基准点位置基本一致 (25)图30辅助边上基准点的位置要求 (25)图31镜像对称拼板辅助边上MARK点位置要求 (26)图32局部MARK点相对于器件中心点中心对称 (26)图33热敏元件的放置 (27)图34插拔器件需要考虑操作空间 (27)图35大面积PCB预留印锡支撑PIN位置 (27)图36拉手条与器件高度匹配 (28)图37焊点目视检查要求示意图 (28)图38插框PCB进槽方向SMD器件禁布区示意图 (28)图39面阵列器件的禁布区要求 (29)图40两个SOP封装器件兼容的示意图 (29)图41片式器件兼容示意图 (29)图42贴片与插件器件兼容设计示意图 (29)图43贴片器件引脚与焊盘接触面积示意图 (30)图44器件布局的距离要求示意图 (30)图45BARCODE与各类器件的布局要求 (31)图46印锡区禁布丝印 (32)图47偷锡焊盘设计要求 (32)图48SOT器件波峰焊布局要求 (32)图49相同类型器件布局图示 (33)图50不同类型器件布局图 (33)图51通孔、测试点与焊盘距离具体定义 (34)图52元件本体之间的距离 (34)图53烙铁操作空间 (35)图54最小焊盘边缘间距 (35)图55焊盘排列方向(相对于进板方向) (35)图56焊点和器件之间位置示意图 (36)图57焊点为中心、R=6mm的示意图 (36)图58间距大于1.27mm,焊盘大于1mm的多引脚插件焊点 (36)图59单点焊接推荐的布局 (37)图60对侧或三侧有器件的单点布局 (37)图61相邻两侧有器件的单点布局 (37)图62一侧有器件的单点布局 (38)图63器件两侧或两侧以上有器件的布局 (38)图64一侧有器件的布局 (38)图65多排多引脚器件禁布区 (39)图66欧式连接器、接地连接器定位要求 (39)图672mmFB连接器、电源插针定位要求 (39)图682mmHM、2.5mmHS3、2mmHM电源连接器定位要求 (40)图69弯公/母连接器正面和背面的禁布区 (40)图70连接器面的禁布要求 (41)图71连接器背面的禁布要求 (41)图72地插座的禁布要求 (41)图732mmFB电源插座的禁布要求 (42)图74压接型牛头插座的禁布要求 (42)图75D型连接器的禁布要求 (42)图76孔距离要求 (43)图77孔类型 (44)图78定位孔示意图 (44)图79槽孔在平面层的最小间隙要求 (45)图80走线到焊盘距离 (45)图81金属壳体器件表层走线过孔禁布区 (46)图82插槽区域的禁布区 (46)图83避免不对称走线 (47)图84焊盘中心出线 (47)图85焊盘中心出线 (47)图86焊盘出线要求一 (47)图87焊盘出线要求二 (48)图88走线与过孔的连接方式 (48)图89网格的设计 (49)图90过孔阻焊开窗示意图 (49)图91金属化安装孔的阻焊开窗示意图 (49)图92非金属化安装孔阻焊设计 (49)图93微带焊盘孔的阻焊开窗 (50)图94非金属化定位孔阻焊开窗示意图 (50)图95BGA测试焊盘示意图 (50)图96BGA下测试孔阻焊开窗示意图 (51)图97焊盘的阻焊设计 (51)图98焊盘阻焊开窗尺寸 (51)图99密间距的SMD阻焊开窗处理示意图 (52)图100金手指阻焊开窗示意图 (52)图101需要过波峰焊的PCB板边阻焊开窗设计示意图 (53)图102条形码的位置要求 (54)图103制成板条码框 (55)图104成品板条码框 (55)图105可加工的尺寸示意图 (57)图106背板倒角尺寸示意图 (58)图107牛头插座间距要求 (59)图108D型连接器间距要求 (59)图109压接型普通插座间距要求 (59)图110背板连接器右插板布局示意图 (61)图111minicoax和2mmHM连接器的位置要求 (61)图112接地连接器和欧式连接器的位置要求 (62)图1132mmFB连接器和单pin电源插针的位置要求 (62)图1142mmHM连接器和单pin电源插针的位置要求 (62)图1152mmHM-1*3pin电源连接器和2mmHM-C型连接器位置要求 (63)图1162mmHM-1*3pin电源连接器的位置要求 (63)图117欧式连接器禁布要求示意图 (64)图118波峰焊背板焊点布置要求示意图 (64)图119D型连接器的禁布要求 (65)图120牛头插座禁布要求 (65)图121BNC插座的禁布要求 (66)图122单面贴装示意图 (68)图123单面混装示意图 (68)图124双面贴装示意图 (68)图125常规波峰焊双面混装示意图 (68)图126选择性波峰焊双面混装示意图 (68)图127背板主流工艺1示意图 (68)图128背板主流工艺2示意图 (69)图129背板主流工艺3示意图 (69)图130背板主流工艺4示意图 (69)图131背板主流工艺5示意图 (70)图132背板主流工艺6示意图 (70)图133同轴连接器选择性波峰焊布局设计要求 (71)表1缺省的层厚要求 (15)表2PCB尺寸要求 (16)表4条码与各种封装类型器件距离要求表 (30)表5相同类型器件布局要求数值表 (33)表6不同类型器件布局要求数值表 (33)表7安装定位孔优选类型 (43)表8禁布区要求 (44)表9推荐的线宽/线距 (45)表10走线到非金属化孔距离 (46)表11阻焊设计推荐尺寸 (51)表12可加工的尺寸 (57)表13元器件丝印要求表 (66)表14扩展卡PCB的厚度要求 (70)表15存条PCB的厚度要求 (70)前言本规的其他系列规:《柔性PCB工艺设计规》与对应的国际标准或其他文件的一致性程度:无规代替或作废的全部或部分其他文件:《PCB工艺设计规》本规由单板工艺设计部门提出。
PCB工艺设计规范标准

SOT、SOP
0.45
0.50
0.45
5.00
SOJ、PLCC
0.30
0.45
5.00
QFP
0.30
5.00
BGA
8.00
1[30]细间距器件与传送边所在的板边距离要求大于10mm,以免影响印刷质量。
建议:建议条码框与表面贴装器件的距离需要满足如下需求。以免影响印锡质量。见表2
表2 条码与各封装类型器件距离要求表
说明:对于一些不规则的PCB(如L型PCB),采用合适的拼版方式可提高板材利用率,降低成本。图6
图6 :L型PCB优选拼版方式
1[8]若PCB要经过回流焊和波峰焊工艺,且单元板板宽尺寸>60.0mm,在垂直传送边的方向上拼版数量不应超过2。
图7 :拼版数量示意图
1[9]如果单元板尺寸很小时,在垂直传送边的方向拼版数量可以超过3,但垂直于单板传送方向的总宽度不能超过150.0mm,且需要在生产时增加辅助工装夹具以防止单板变形。
5
IPC-7095A
Design and Assembly Process Implementation for BGAs
6
SMEMA3.1
Fiducial Design Standard
3.术语和定义
细间距器件:pitch≤0.65mm异型引脚器件以及pitch≤0.8mm的面阵列器件。
Stand off:器件安装在PCB板上后,本体底部与PCB表面的距离。
图 18 :两个SOP封装器件兼容的示意图
1[26]对于两个片式元件的兼容替代。要求两个器件封装一致。如图:
图 19 :片式器件兼容示意图
1[27]在确认SMD焊盘以及其上印刷的锡膏不会对THD焊接产生影响的情况下,允许THD与SMD重叠设计。如图。
6轴焊接机器人两轴设计

6轴焊接机器人两轴设计1. 引言随着工业自动化的发展,机器人已经成为现代制造业中不可或缺的重要设备。
而焊接作为一种常见的制造工艺,在许多领域都有广泛的应用。
为了提高焊接质量和生产效率,6轴焊接机器人逐渐取代传统的手工焊接,成为焊接领域的重要工具。
本文将对6轴焊接机器人的两轴设计进行探讨,旨在进一步优化机器人的性能和稳定性。
2. 6轴焊接机器人概述6轴焊接机器人是一种具有6个自由度的机器人,其可以在空间中灵活移动和定位。
它由多个轴组成,每个轴都有一个电动机驱动,并且可以通过控制系统精确地控制。
6轴焊接机器人通常由基座、臂、腕和工具端等部分组成。
其中,两轴是机器人中比较重要的部分,对机器人的整体性能起着决定性的作用。
3. 两轴设计的重要性两轴设计是6轴焊接机器人关键的构成部分,它们负责控制机器人的运动。
两轴的设计直接影响到机器人的定位精度、速度和稳定性等重要性能指标。
一个优秀的两轴设计可以有效提高机器人的工作效率,降低制造成本,并且可以适应不同的焊接任务。
3.1 提高机器人的定位精度两轴的设计直接影响到机器人的运动精度和定位能力。
在焊接过程中,精确的定位是保证焊缝质量的关键。
一个设计合理的两轴可以实现更加精确的定位,保证焊接质量的稳定性。
3.2 提高机器人的运动速度在大规模生产中,焊接速度是提高生产效率的重要因素。
两轴的设计可以通过提高机器人的移动速度来加快焊接速度,从而提高生产效率。
3.3 提高机器人的稳定性焊接过程中的震动和振动往往会对焊接质量造成影响。
一个稳定的机器人在焊接过程中可以减少震动和振动的发生,确保焊缝的质量。
4. 两轴设计的考虑因素在进行两轴设计时,需要考虑以下几个重要因素:4.1 负载能力两轴需要承载焊接工具以及相关设备的重量。
因此,设计时需要确保两轴具备足够的负载能力,以保证焊接任务的正常进行。
4.2 控制精度两轴的控制精度对于机器人的整体性能至关重要。
一个高精度的两轴可以实现更加准确的焊接定位和运动控制。
PCB电路板PCB设计工艺规范
PCB电路板PCB设计工艺规范PCB(Printed Circuit Board)是电子电路的重要组成部分,是连接电子元器件的基础。
PCB设计工艺规范是为了确保电路板的质量和可靠性,规范设计人员在设计和制造过程中的操作和要求。
下面将介绍一些常见的PCB设计工艺规范。
1.设计规范-PCB尺寸规范:根据电路板的应用需求,确定最佳的尺寸和形状。
-层压结构规范:根据电路板的复杂度和布线需求,选择适当的层压结构。
-线宽线间规范:根据电流和阻抗需求,确定电路板上的线宽和线间距。
-焊盘规范:确定焊盘的尺寸、形状和间距,以确保焊接质量。
-组件布局规范:合理布置电子元器件,使得信号传输和散热均衡。
2.贴片工艺规范-引脚间距规范:根据元器件的引脚间距,确定元器件的位置和布局。
-焊膏剂规范:选择适当的焊膏剂,并控制其厚度和分布,以确保焊接质量。
-焊接温度规范:根据元器件和焊接材料的要求,确定合适的焊接温度。
-退锡规范:通过合适的退锡工艺,确保焊接点的可靠性和连接性。
3.线路布线规范-信号完整性规范:根据信号传输特性和电磁兼容性要求,确定合适的线路布线规范。
-电源和地线规范:保持电源和地线的稳定性和布线规范,以提供可靠的电源和接地。
-信号层划分规范:根据布线需求和层压结构,确定信号层的划分和连接方式。
4.工艺控制规范-正确的板材选择:根据电路板的应用和环境要求,选择合适的板材。
-禁忌设计规范:避免设计不合理的布线,如绕线锯齿状、封装阻挡焊盘等。
-高速信号特殊处理规范:对于高速信号,需要特殊处理,如规范的阻抗匹配、信号层堆叠等。
-容错性设计规范:在设计过程中考虑到制造过程中的不确定因素,增强电路板的容错性。
5.丝印和标识规范-丝印的位置和内容规范:确定电路板上的标识位置和内容,包括元器件的位置和器件类型。
-标示符规范:标示电路板的版本号、日期、厂家等信息,以便追踪和维护。
PCB设计工艺规范的目的是确保电路板的质量和可靠性,避免在制造和使用过程中的潜在问题。
PCB设计工艺标准(简易版)

PCB设计工艺技术标准编制:审核:会签:批准:1范围本设计规范规定了印制电路板设计中的基本原则和技术要求。
本设计规范适用于中格威电子设备用印刷电路板的设计。
2引用文件下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。
本标准出版时,所示版本均为有效。
所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
3定义无。
4基本原则在进行印制板设计时,应考虑本规范所述的四个基本原则。
4.1电气连接的准确性印制板设计时,应使用电原理图所规定的元器件,印制导线的连接关系应与电原理图导线连接关系相一致,印制板和电原理图上元件序号应一一对应。
注:如因结构、电气性能或其它物理性能要求不宜在印制板上布设的导线,应在相应文件(如电原理图上)上做相应修改。
4.2可靠性和安全性印制板电路设计应符合电磁兼容和电器安规及其余相关要求。
4.3工艺性印制板电路设计时,应考虑印制板制造工艺和电控装配工艺的要求,尽可能有利于制造、装配和维修,降低焊接不良率。
4.4经济性印制板电路设计在满足使用的安全性和可靠性要求的前提下,应充分考虑其设计方法、选择的基材、制造工艺等,力求经济实用,成本最低。
5详细要求5.1印制板的选用5.1.1印制电路板的层的选择一般情况下,应该选择单面板。
在结构受到限制或其他特殊情况下,经过技术部部长批准,可以选择用双面板设计。
5.1.2 印制电路板的材料和品牌的选择5.1.2.1双面板应采用玻璃纤维板FR-4/CEM-1,单面板应使用纸板或环氧树脂板FR-1、FR-2(如“L”,“KB”/“DS”)。
如果品质可以得到确保,经过技术部部长、总经理批准,单面板可以使用其他材料。
5.1.2.2印制板材料的厚度选用1.6mm,双面板铜层厚度一般为1盎司,大电流则可选择两面都为1盎司,单面板铜层厚度一般为1盎司。
( 1盎司=35mm)特殊情况下,如果品质可以得到确保,经过技术部部长、总经理批准,可以选择其他厚度的印制板。
印制电路板工艺设计规范精选全文

可编辑修改精选全文完整版印制电路板工艺设计规范一、目的:规范印制电路板工艺设计,满足印制电路板可制造性设计的要求,为硬件设计人员提供印制电路板工艺设计准则,为工艺人员审核印制电路板可制造性提供工艺审核准则。
二、范围:本规范规定了硬件设计人员设计印制电路板时应该遵循的工艺设计要求,适用于公司设计的所有印制电路板。
三、特殊定义:印制电路板(PCB, printed circuit board):在绝缘基材上,按预定设计形成印制元件或印制线路或两者结合的导电图形的印制板。
元件面(Component Side):安装有主要器件(IC等主要器件)和大多数元器件的印制电路板一面,其特征表现为器件复杂,对印制电路板组装工艺流程有较大影响。
通常以顶面(Top)定义。
焊接面(Solder Side):与印制电路板的元件面相对应的另一面,其特征表现为元器件较为简单。
通常以底面(Bottom)定义。
金属化孔(Plated Through Hole):孔壁沉积有金属的孔。
主要用于层间导电图形的电气连接。
非金属化孔(Unsupported hole):没有用电镀层或其它导电材料涂覆的孔。
引线孔(元件孔):印制电路板上用来将元器件引线电气连接到印制电路板导体上的金属化孔。
通孔:金属化孔贯穿连接(Hole Through Connection)的简称。
盲孔(Blind via):多层印制电路板外层与内层层间导电图形电气连接的金属化孔。
埋孔(Buried Via):多层印制电路板内层层间导电图形电气连接的金属化孔。
测试孔:设计用于印制电路板及印制电路板组件电气性能测试的电气连接孔。
安装孔:为穿过元器件的机械固定脚,固定元器件于印制电路板上的孔,可以是金属化孔,也可以是非金属化孔,形状因需要而定。
塞孔:用阻焊油墨阻塞通孔。
阻焊膜(Solder Mask, Solder Resist):用于在焊接过程中及焊接后提供介质和机械屏蔽的一种覆膜。
六自由度焊接机器人的技术参数
六自由度焊接机器人的技术参数六自由度焊接机器人是一种具有高度智能化的焊接设备,它具备六个自由度的灵活运动能力,可以在三维空间内实现多角度、高精度的焊接操作。
这种机器人的技术参数包括工作半径、负载能力、重复定位精度、速度范围、控制系统等关键指标。
工作半径是指机器人从基准点到达能够进行焊接操作的最远距离。
六自由度焊接机器人通常具有较大的工作半径,可以满足不同尺寸的焊接工件需求。
负载能力是指机器人能够承载的最大负荷重量。
这个参数决定了机器人能否完成重型焊接任务。
六自由度焊接机器人通常具有较高的负载能力,能够承载数十千克的焊接工件。
重复定位精度是衡量机器人运动精度的重要指标。
它描述了机器人在多次运动后回到同一位置的精确程度。
六自由度焊接机器人的重复定位精度通常在毫米级别,能够满足高精度焊接的要求。
速度范围是指机器人在运动过程中可达到的最大速度和最小速度。
六自由度焊接机器人通常具有较快的速度,能够提高焊接效率。
控制系统是六自由度焊接机器人的核心部分,它通过复杂的算法和传感器实现对机器人动作的控制。
控制系统需要具备实时性、稳定性和可靠性,以确保机器人的运动精度和安全性。
除了以上技术参数外,六自由度焊接机器人还具备其他一些重要特点。
例如,它可以通过编程实现自动化的焊接操作,减少了人工操作的需求;它还可以通过与其他设备的联动,实现更高效的生产流程;另外,它还具备灵活的工作空间布局能力,可以适应不同焊接环境的需求。
总体而言,六自由度焊接机器人通过高度智能化的设计和先进的技术参数,为焊接工艺提供了更高效、更精确、更安全的解决方案。
它的出现不仅提升了焊接工业的生产效率,同时也减少了人力资源的投入,为企业带来了更大的经济效益。
印制电路板设计规范精选全文完整版
可编辑修改精选全文完整版印制电路板设计规范目录1 主题内容与适用范围 (3)2 引用标准 (3)3印制板类型 (3)4 材料及选用原则 (4)4.1材料 (4)4.1.1制板常用的覆铜箔层压板和基材 (4)4.1.1.1 刚性印制板用覆铜箔层压板 (5)4.1.1.2 挠性印制板基材 (5)4.1.1.3 多层板用的预浸渍B阶段环氧玻璃布粘接片 (5)4.1.2 覆铜箔层压板的主要性能指标 (5)4.1.2.1 覆铜箔层压板的规格和铜箔厚度 (5)4.1.2.2 其它性能 (6)4.2 材料的选用原则 (6)4.2.1 印制板的经济尺寸 (7)5 表面涂覆(镀覆)层 (8)5.1 金属涂(镀)覆层 (8)5.2 非金属涂覆层 (8)6 印制板的结构尺寸 (8)6.1 印制板的基本尺寸要素 (8)6.2 形状及尺寸 (9)6.3 厚度 (9)6.3.1 印制板的厚度 (9)6.3.2 多层印制板中间绝缘层的厚度 (9)6.4 孔的尺寸及公差 (9)6.4.2 金属化孔的尺寸 (10)6.4.3 异形孔的尺寸 (10)6.4.4 元件孔与插入元件引线后的间隙 (10)6.5 孔位和图形位置 (11)6.5.1 坐标网格 (11)6.5.2 参考基准 (11)6.5.2.1基准标记和元件位置标记 (11)6.5.3 孔中心位置及公差 (12)6.5.4 孔间距 (12)6.5.5 孔边缘与印制板边缘的距离 (12)6.5.6 孔和连接盘的错位 (12)6.6 连接盘(焊盘) (13)6.6.1 连接盘尺寸 (13)6.6.2 连接盘形状 (14)6.6.3 开槽焊盘 (15)6.6.4 贴片元件的焊盘 (15)6.6.4.1.贴片电阻器和电容器焊盘图形设计 (15)6.6.4.2.贴片晶体管焊盘图形 (17)6.6.4.3.贴片集成电路焊盘图形 (18)6.6.4.4 焊膏和焊接掩模的焊盘图形 (20)6.6.5 纽扣式电池电极弹片的焊盘图形 (20)6.6.6 嵌入式电阻和二极管的焊盘图形 (20)6.7 印制导线的宽度和间距 (20)6. 7. 1 印制导线的宽度 (20)6. 7. 2 印制导线间距 (21)6. 7. 3 印制按键图形的设计 (21)6. 7. 4 COB连接盘的设计 (22)6.8 插接区域、连接方式和印制插头 (22)6.8.1 插接区域 (22)6.8.2 连接方式 (22)6.8.3 印制插头 (22)6.8.3.1 印制插头的设计原则 (22)6.8.3.2 印制插头接触片的设计 (23)6.8.4 涂碳金手指的设计 (24)6.8.5 工艺导线设计 (24)6.9 槽和缺口尺寸 (24)7 电气性能 (24)7.1 电阻 (24)7.1.1 导线电阻 (24)7.1.2 互连电阻 (24)7.1.3 金属化孔电阻 (25)7.1.4 碳过孔电阻 (25)7.2电流负载能力 (25)7.2.2 内层连续电流 (26)7.2.2 冲击电流 (26)7.3 绝缘电阻 (27)7.2.1 表层绝缘电阻 (27)7.3.2 内层绝缘电阻 (28)7.3.3 层间绝缘电阻 (28)7.4 耐压 (28)7.4.1 表面耐压 (28)7.4.2 层间耐压 (30)7.5 其它电气性能 (30)7.5.1 特性阻抗 (30)7.5.2 电感和电容 (31)7.5.3 传输延迟 (31)7.5.4 串扰特性 (31)7.5.5 衰减与损耗 (31)7.6 降低噪声与电磁干扰的一些经验 (32)8 机械性能 (32)8.1 导电图形的附着强度 (32)8.1.1 导线的抗剥强度 (32)8.1.2 连接盘(焊盘)的拉脱强度 (33)8.1.2.1 非金属化孔连接盘的拉脱强度 (33)8.1.2.2 无连接盘金属化孔的拉脱强度 (33)8.2 翘曲度 (33)9 印制板图设计 (33)9.l 印制板图的种类 (33)9.1.1 元件面和焊接面 (34)9.1.2 孔和导电图形布置 (34)9.1.3 布线区域 (34)9.1.4 布线要求 (35)9.1.5 测试焊盘 (37)9.1.6 轴向元件间的距离 (38)9.1.7 装配贴片式元件的相关要求 (38)9.1.8 电源线(层)和接地线(层)的设计 (39)9.1.9 SMD元件的布局 (40)9.1.9.1 贴片元件的间距 (40)9.1.10 非导电图形设计 (41)9.1.10.1 阻焊图形 (41)9.1.10.2 标记字符图 (42)9.1.11 位置标记图形 (43)9.1.11.1 定位标记图形 (43)9.1.11.2 定位形式 (43)9.2 原版图形 (43)9.3 机械加工图 (43)9.3.1 印制板加工常用公差 (43)9.4 印制板装配图 (44)1 主题内容与适用范围本规范规定了印刷电路板(以下简称印制板)设计中的基本原则、技术要求和数据。
机器人焊接规范

机器人焊接规范机器人自动化焊接技术的应用已经成为了现代制造业必不可少的一项工艺。
机器人焊接技术可以增加产品质量,提高生产效率,减少人力成本,降低安全事故等问题。
然而,在机器人焊接过程中,一些安全隐患和质量问题也容易出现。
因此,为了保证机器人焊接的质量和安全,我们需要制定相应的机器人焊接规范。
1. 焊接前的准备工作在进行机器人焊接前,操作人员必须进行基本的准备工作。
首先需要对焊接区域进行清洁。
焊接区域的表面必须干净、平整,并且没有杂质、油污等。
然后需要选择适当的焊接材料和焊接参数。
这需要根据焊接材料的种类和焊接结构的要求来确定。
最后,需要对机器人进行检查,确保机器人处于良好的工作状态。
2. 焊接的安全措施机器人焊接需要采取相应的安全措施,以确保操作人员和设备的安全。
首先,需要对操作人员进行培训,使其掌握机器人焊接技能和相关安全知识。
其次,要配备相应的防护设备,例如安全带、手套、面罩等。
同时,对于机器人焊接区域需要进行隔离和标识。
最后,在操作机器人时需要遵守安全规程,特别是在机器人运动时要避免靠近运动轨迹。
3. 焊接工艺流程机器人焊接的工艺流程包括焊前准备、焊接参数设置、焊接操作、焊后处理等几个阶段。
在焊前准备阶段,需要进行焊接前的准备工作。
在焊接参数设置阶段,需要根据焊接材料的种类、板厚和焊接结构的要求来设置合适的焊接参数。
在焊接操作阶段,需要对机器人进行切割、加热、填料、熔合等一系列操作。
在焊后处理阶段,需要对焊接区域进行进行清洁和修整。
4. 焊接质量要求机器人焊接的质量要求主要包括焊缝的形状、尺寸、质量和机器人焊接的强度等方面。
焊缝的形状应该有一定的规范和一致性,并且焊缝的尺寸应该符合设计要求。
焊缝表面应该平整、光滑、无裂纹和孔洞等缺陷。
焊接接头的强度应该达到设计要求,并且焊接过程中的应变和缩短应该控制在合理范围内。
5. 操作人员技术要求机器人焊接的质量和效率取决于操作人员的技能水平。
操作人员需要掌握焊接相关知识和技能,理解相关的机器人技术和工艺流程。
机器人焊接构造设计要求

机器人焊接构造设计要求1.1机器人焊接构造设计的基本原则应符合下列规定:1 宜选用可标准化、模块化、系列化生产、制作的构件形式;2 应选用适于机器人焊接的节点形式;3 宜采用圆管、方钢管等型钢构件,减少焊接构件的使用;4 应尽量减少焊缝数量;焊缝布置应简单,避免交错、汇集;焊缝形状应为规则的直线或弧线,避免出现大角度转折;焊缝截面应均匀,无突变;5 宜选用单面单道或双面单道焊缝,构件板厚不宜大于30mm;当采用多层多道焊缝时,应增加产品试板;6 应选用气体保护焊或埋弧焊焊接方法;7 不宜采用仰焊位置;8 焊缝坡口的加工精度和接头的装配精度应满足机器人焊接的要求。
1.2机器人焊接节点形式可为梁贯通形式或柱贯通形式,其构造设计应符合本标准的相应规定。
1.3隔板贯通梁柱节点形式可采用图1.3-1、图1.3-2的节点形式。
1.4柱贯通梁柱节点形式可采用图1.4-1、图1.4-2的节点形式。
图1.3-1 隔板贯通梁柱节点(方钢管柱)图1.3-2 隔板贯通梁柱节点(圆钢管柱)图1.4-1 柱贯通梁柱节点(方钢管柱)1.4-2 柱贯通梁柱节点(圆钢管柱)5.8窄间隙焊构造设计要求5.8.1窄间隙焊构造设计的基本原则应符合下列规定:1 宜选用对厚度方向性能有要求的钢板且板厚不宜小于40mm;2 宜选用自动气体保护焊或埋弧自动焊焊接方法;3 宜采用U形坡口或坡口角度不大于15°的V形坡口;4 应采用平焊位置焊接;5 焊缝坡口的加工精度和接头的装配精度应满足窄间隙焊的要求。
5.8.2承受动荷载且需经疲劳验算的焊接接头,不宜使用窄间隙焊方法焊接。
5.8.3采用窄间隙焊的构造设计应经原设计单位审核并进行焊接工艺评定试验,合格后并方可使用。
PCB设标准规范(BD)

PCB设计规范拟制: 张华明日期:2005-9-9 审核: 日期:审核: 日期:批准: 日期:版权所有侵权必究修订记录PCB设计规范(一)1 概述PCB设计规范(一)的目的在于说明使用CR5000的PWS的印制板设计软件进行印制板设计的一般流程和一些注意基本事项,为PCB设计人员提供设计规范,本规范并不适用其它的印制板软件, 如PROTEL系列,也不一定适用CR5000的其它印制板设计工具。
2 设计流程PCB的设计流程分为PCB工程建立、元器件布局、布线、检查、输出五个步骤,以上步骤适用于普通用户。
2.1 PCB工程建立2.1.1 层规范设置PCB工程建立开始时选择相应的层规范(2,4,6层等),每种层规范有默认的一些子规范,Layer Spec,Via,Aperture,Grid等,用户可以进行设定。
设置:单,双面板的层规范选择Rules_Layer2.rul4层板的层规范选择Rules_Layer4_mixed.rul2.1.2 网表输入网表输入有两种方法,一种是PCB工程建立时网络表输入:Board Generation,另一种方法是直接对已建立的PCB工程装载网表进行正向标注:F orward Annotation。
无论哪种方法必须同步原理图,保证原理图和PCB的一致。
2.1.3 规则设置如果在PCB工程建立时就应该把PCB的设计规则设置好,当然可以对或在PCB设计(Board Design Rules)环境中进行设置或修改。
注意:PCB设计规则、层定义、过孔设置等都包含缺省设置,网表输入进来以后,按照设计的实际情况进行设定。
例如把电源网络和地分配给电源层和地层,个别信号的高级设置。
必须满足当前PCB生产、PCB焊接工艺要求。
2.2 元器件布局首先在PC B oard Shape Editor中进行必要的板图设计,进入FLOOR PLANNER环境后,按照一些规则把元件摆放整齐,即元器件布局。
六轴焊接机器人2轴设计课设
六轴焊接机器人2轴设计课设介绍六轴焊接机器人是一种多关节机器人,它具有六个自由度,可以在三维空间内灵活移动和操作,广泛应用于焊接领域。
本文将着重探讨六轴焊接机器人的2轴设计课设,包括其原理、设计要点和实现过程。
原理六轴焊接机器人的2轴设计是指其中的两个关节,也称为2R机械臂。
该机械臂可以实现平面内的运动,通过两个旋转关节控制机械臂的角度和位置。
在焊接过程中,这两个关节负责控制焊枪的位置和角度,以保证焊接的精度和稳定性。
设计要点六轴焊接机器人的2轴设计需要考虑以下几个要点:1. 动力学分析在设计2轴机械臂时,需要进行动力学分析,确定每个关节的负载和扭矩要求。
通过对机械臂的力学性能进行研究,可以确定最佳的驱动系统和电机参数,以保证机械臂的稳定性和精度。
2. 运动学建模通过运动学建模,可以获得机械臂关节角度与焊接点位置之间的关系。
利用逆运动学求解方法,可以根据焊点位置确定关节角度,从而实现精确的焊接操作。
3. 控制系统设计六轴焊接机器人的2轴设计需要配备相应的控制系统。
控制系统可以根据焊接要求提供合适的控制算法,以实现焊接路径规划和轨迹跟踪控制。
同时,还需要考虑与其他关节和外部设备的协调控制,以保证整个机器人的工作效率和稳定性。
实现过程以下是实现六轴焊接机器人2轴设计的具体步骤:1. 机械结构设计根据焊接任务和工件要求,设计适合的机械结构。
机械结构应包括两个旋转关节和相应的传动装置,以实现关节的运动控制。
2. 传感器选型选择合适的传感器用于检测焊接点的位置和角度。
传感器可以采用视觉或激光测距等技术,以提供准确的数据供控制系统使用。
3. 控制系统搭建搭建六轴焊接机器人的控制系统。
控制系统应包括运动控制部分和路径规划部分。
运动控制部分负责控制关节的角度和位置,路径规划部分负责计算焊接路径和轨迹。
4. 软件开发开发控制系统所需的软件。
根据控制系统的需求,编写程序进行控制算法的实现和路径规划的计算。
同时,还需要编程实现与传感器和外部设备的数据交互。
PCB工艺设计规范
xxxxxxxxx有限公司企业技术规范PCB工艺设计规范目次前言 ............................................................................................ 错误!未定义书签。
1范围和简介................................................................................ 错误!未定义书签。
范围 ................................................................................... 错误!未定义书签。
简介 ................................................................................... 错误!未定义书签。
关键词 ............................................................................... 错误!未定义书签。
2规范性引用文件........................................................................ 错误!未定义书签。
3术语和定义................................................................................ 错误!未定义书签。
4PCB叠层设计 ............................................................................. 错误!未定义书签。
叠层方式 ........................................................................... 错误!未定义书签。
PCB工艺设计规范
PCB工艺设计规范1. 目的规范产品的PCB工艺设计,规定PCB工艺设计的相关参数,使得PCB的设计满足可生产性、可测试性、安规、EMC、EMI等的技术规范要求,在产品设计过程中构建产品的工艺、技术、质量、成本优势。
2. 适用范围本规范适用于所有产品的PCB工艺设计,运用于但不限于PCB的设计、PCB投板工艺审查、单板工艺审查等活动。
3. 定义规范之前的相关标准、规范的内容如与本规范的规定相抵触的,以本规范为准。
导通孔(via):一种用于内层连接的金属化孔,但其中并不用于插入元件引线或其它增强材料。
盲孔(Blind via):从印制板内仅延展到一个表层的导通孔。
埋孔(Buried via):未延伸到印制板表面的一种导通孔。
过孔(Through via):从印制板的一个表层延展到另一个表层的导通孔。
元件孔(Component hole):用于元件端子固定于印制板及导电图形电气联接的孔。
Stand off:表面贴器件的本体底部到引脚底部的垂直距离。
4. 引用/参考标准或资料TS—S0902010001 <<信息技术设备PCB安规设计规范>>TS—SOE0199001 <<电子设备的强迫风冷热设计规范>>TS—SOE0199002 <<电子设备的自然冷却热设计规范>>IEC60194 <<印制板设计、制造与组装术语与定义>> (Printed Circuit Board design manufacture and assembly-terms and definitions)IPC—A—600F <<印制板的验收条件>> (Acceptably of printed board)5. 规范内容5.1 PCB板材要求5.1.1确定PCB使用板材以及TG值确定PCB所选用的板材,例如FR—4、铝基板、陶瓷基板、纸芯板等,若选用高TG值的板材,应在文件中注明厚度公差。
PCB技术标准

PCB技术标准PCB(Printed Circuit Board)技术标准是指制定和规范PCB设计和制造过程中必须遵循的技术要求和规范。
这些标准旨在确保PCB的质量和可靠性,并提供通用的设计和制造指导,以便不同的制造商和设计者能够互通有无。
1.PCB设计标准:PCB设计标准是指PCB布图和布线的相关规定,包括PCB尺寸、布局、线宽与间距、层间间隔、引脚分配等。
这些标准有利于提高电路的可靠性和稳定性,减少电磁干扰和串扰。
2.材料选择标准:PCB材料的选择直接关系到电路板的性能和可靠性,因此需要遵循一定的标准。
例如,标准要求使用高耐温、低介电常数和稳定的材料,以确保电路板在高温和湿度环境下的可靠性。
3.焊接标准:PCB制造过程中的焊接工艺对于电路板的质量和可靠性起着至关重要的作用。
焊接标准包括焊接参数、焊接剂选择、焊接工艺等内容,以确保焊接质量符合要求。
4.线路板层间绝缘标准:PCB多层板的层间绝缘水平对于电路板的可靠性和安全性至关重要。
标准规定了层间绝缘材料的性能要求和测试方法,以确保电路板在高温和高湿度环境下具有良好的层间绝缘性能。
5.表面处理标准:PCB表面处理是为了提供良好的焊接性能和防止氧化腐蚀。
标准规定了表面处理的种类、工艺和要求,例如有机锡、化学镀金和喷锡等,以确保焊接质量和电路板的可靠性。
6.工艺检测标准:在PCB制造过程中,需要进行工艺检测以确保产品质量。
标准规定了各项工艺检测的方法、流程和要求,例如PCB外观检测、线宽测量、阻焊检测、电性能测试等。
PCB技术标准的制定和遵循,对于保证产品质量和生产效率具有重要的意义。
标准化的PCB制造过程可以提高生产效率,降低生产成本,并确保产品质量和可靠性。
同时,标准化还有利于不同厂家之间的互通性和协作,促进行业的发展和进步。
因此,制定和遵守PCB技术标准是PCB设计和制造过程中不可或缺的一部分。
六轴机器人系统设计
六轴机器人系统设计第一章六轴机器人总体方案旳设计 (6)1.1 六轴机器人旳设计内容及规定 (6)1.2 六轴机器人旳总体设计 (6)1.3 机器人腰部关节旳设计 (8)1.4 机器人肘部旳设计 (8)1.5 机器人大小臂设计 (9)1.6 机器人腕部旳设计 (10)1.7 工业机器人驱动方式选择 (11)1.4谐波减速器简介 (13)1.4.1 谐波齿轮减速器简介 (13)1.4.2 谐波减速器基本构造 (13)1.4.3 谐波减速器工作原理 (14)1.4.4谐波减速器旳重要特性 (15)1.4.5谐波减速器旳减速比 (16)1.5 RV减速器简介 (16)1.5.1 RV 减速器简介 (16)1.4.2 RV减速器基本构造 (17)1.4.3 RV 减速器传动原理 (17)1.4.3 RV 减速器旳重要性能特性 (18)1.4.4 RV 减速器旳旋转方向和减速比 (19)第二章机器人传动系统设计 (22)2.1 机器人简朴模型与静力学分析 (22)2.2 伺服电机和减速器选型计算 (24)2.3 直齿轮旳选择与校核 (29)2.4 锥齿轮旳选择与校核 (34)2.5 传动系统中其他齿轮设计校核 (38)2.5 轴六旳设计 (39)2.6 轴承旳校核 (43)第三章谐波减速器旳设计 (45)3.1谐波齿轮减速器简要简介和设计规定 (45)3.2 总体方案设计 (45)3.3 柔轮和刚轮材料旳选择 (46)3.3.1 柔轮材料选用 (46)3.3.2 刚轮材料选用 (46)3.3.2 凸轮材料选用 (46)3.4 钢轮、柔轮、波发生器旳设计计算与校核 (46)3.4.1 各零件旳几何尺寸计算 (46)3.4.2柔轮校核 (48)第四章RV减速器旳设计 (50)4.1 RV减速器旳简要简介和设计规定 (50)4.1.1 减速器概要 (50)4.1.2 设计规定 (50)4.2行星齿轮与太阳轮旳设计 (51)4.2.1.零件材料和热解决旳选择: (51)4.2.2.齿轮齿数旳拟定 (51)4.2.3 齿轮模数旳拟定 (51)4.2.4 校核齿轮 (52)4.2.5齿轮几何尺寸旳设计计算 (53)4.3减速器主体部分旳设计计算 (54)4.3.1 设计规定 (54)4.3.2 材料选择和热解决 (54)4.3.3 设计计算 (54)4.3.4 轴承旳选择与校核 (56)第五章控制系统设计 (57)5.1固高控制器简介 (57)5.2 软件开发平台 (57)5.3 硬件开发平台 (58)5.4电机控制系统旳基本构成 (59)5.5 GUC-800 系列运动控制器模式应用 (59)第二章六轴机器人总体方案旳设计2.1 六轴机器人旳设计内容及规定六轴机器人在工业中有着广泛旳应用,机器人旳运动机构和运动控制系统是其核心部分。
六自由度焊接机器人设计

六自由度焊接机器人设计1前言1.1设计背景与意义1.1.1 焊接机器人概述焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。
为了适应不同的用途,工业机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人的应用和技术发展经历了三个阶段:示教再现型机器人、具有感知能力的机器人、智能型机器人。
1.1.2 焊接机器人国内外研究现状(1)国外研究现状自从世界上第一台工业机器人UNIMATE于1959年在美国诞生以来,机器人在工业发达国家得到了迅速发展。
其中日本具有机器人王国之称,此外,世界上还有许多工业发达国家,如美国、前苏联等一些国家的机器人产业也发展得很快。
在亚洲,韩国的机器人产业发展也很迅速,现排名世界前列。
现在国外的机器人各个方面的技术发展现状为,在机械结构上以发展关节型机器人为主流,在控制系统方面主要是发展基于PC的开放结构的控制系统,在驱动技术方面主要是发展 AC伺服驱动技术,此外智能化传感器技术的机器人数量呈上升趋势。
焊接机器人技术正朝着高速、高精度、多功能化方向发展。
(2)国内研究现状我国的工业机器人技术经过三十多年的发展,现在已掌握了机器人的设计制造技术、控制系统的硬件和软件设计技术、运动学和轨迹规划技术,开发出了弧焊、点焊、装配等机器人;现阶段我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、铁路机车等主要行业。
其中弧焊机器人已广泛应用于各大汽车制造厂的自动焊装线上。
但从总体上来看,我国的工业机器人技术及其工程上的应用水平和国外相比起来还有一定的差距。
现阶段我国工业机器人技术主题发展战略目标是:根据2l世纪初,我国国民经济对先进制造及自动化技术的需求,瞄准国际前沿高新技术发展方向,创新性地进行研究和开发工业机器人技术领域的基础技术、关键技术,产品技术和系统技术。
六轴焊锡机器人运动控制器的设计

六轴焊锡机器人运动控制器的设计
马永超;罗亮;刘知贵
【期刊名称】《机械设计与制造》
【年(卷),期】2015(000)010
【摘要】设计一种以DSP+FPGA为架构的异构多核六轴焊锡机器人的运动控制器,实现六轴联动.焊锡机器人是以直角坐标机器人的架构为基础,代替人工焊锡的一种装置.运动控制器的硬件设计,包括DSP与FPGA等芯片的硬件连接、输入输出接口电路以及与上位通信接口的设计.软件设计,通过C语言编写插补实例程序并测试输出波形.系统测试,通过编码器反馈的位移数据,分析运动控制器六轴控制的能力.运动控制器性能稳定,开放性好,具有一定的市场价值和前景,成功用于六轴焊锡机器人的控制.
【总页数】4页(P168-171)
【作者】马永超;罗亮;刘知贵
【作者单位】西南科技大学信息工程学院,四川绵阳621000;西南科技大学信息工程学院,四川绵阳621000;西南科技大学信息工程学院,四川绵阳621000
【正文语种】中文
【中图分类】TH16;TP242.3
【相关文献】
1.六足仿生机器人步态研究和运动控制器设计 [J], 储忠;阮坚实;虞刚明;
2.基于DSP和MCX312的六轴运动控制器设计 [J], 叶纯杰;吴洪涛;陈柏;朱留存;
解亚非
3.基于CoDeSys平台的六自由度工业机器人运动控制器设计 [J], 王耀东;徐建明;徐胜华
4.基于ARM+DSP的三轴工业机器人运动控制器设计 [J], 王成琼;麦麦提明·阿不都克力木;尹福成;刘武周
5.基于STM32+FPGA的六自由度机器人运动控制器设计 [J], 陈亚; 史钊亮; 高锦宏; 王殿君
因版权原因,仅展示原文概要,查看原文内容请购买。
PCB板焊盘及通孔的设计规范
PCB设计工艺规范1.概述与范围本规范规定了印制板设计应遵循的基本工艺规范,适合于公司的印制电路板设计。
2.性能等级(Class)在有关的IPC标准中建立了三个通用的产品等级(class),以反映PCB在复杂程度、功能性能和测试/检验方面的要求。
设计要求决定等级。
在设计时应根据产品等级要求进行设计和选择材料。
第一等级通用电子产品包括消费产品、某些计算机和计算机外围设备、以及适合于那些可靠性要求不高,外观不重要的电子产品。
第二等级专用服务电子产品包括那些要求高性能和长寿命的通信设备、复杂的商业机器、仪器和军用设备,并且对这些设备希望不间断服务,但允许偶尔的故障。
第三等级高可靠性电子产品包括那些关键的商业与军事产品设备。
设备要求高可靠性,因故障停机是不允许的。
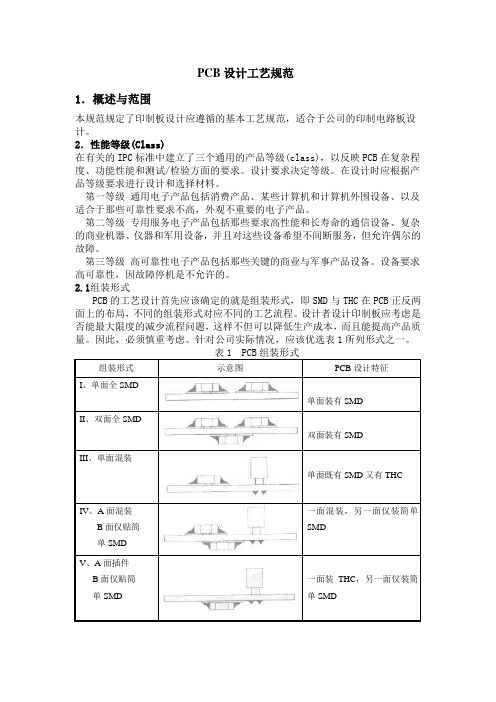
2.1组装形式PCB的工艺设计首先应该确定的就是组装形式,即SMD与THC在PCB正反两面上的布局,不同的组装形式对应不同的工艺流程。
设计者设计印制板应考虑是否能最大限度的减少流程问题,这样不但可以降低生产成本,而且能提高产品质量。
因此,必须慎重考虑。
针对公司实际情况,应该优选表1所列形式之一。
表1 PCB组装形式组装形式示意图PCB设计特征I、单面全SMD单面装有SMDII、双面全SMD双面装有SMDIII、单面混装单面既有SMD又有THCIV、A面混装B面仅贴简单SMD 一面混装,另一面仅装简单SMDV、A面插件B面仅贴简单SMD 一面装THC,另一面仅装简单SMD3. PCB材料3.1 PCB基材:PCB基材的选用主要根据其性能要求选用,推荐选用FR-4环氧树脂玻璃纤维基板。
选择时应考虑材料的玻璃转化温度、热膨胀系数(CTE)、热传导性、介电常数、表面电阻率、吸湿性等因素。
3.2 印制板厚度范围为0.5mm~6.4mm,常用0.5mm,0.8mm,1mm,1.6mm,2.4mm,3.2mm几种。
3.3 铜箔厚度:厚度种类有18u,35u,50u,70u。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
产品工程部-电气科室赵科 2017年2月9日
1/5
1、目的
规范PCB设计标准化,满足六轴机械手焊锡机器人焊接要求,为设计人员提 供 PCB设计准则,为工艺人员审核PCB工艺提供依据。
2、设计标准
焊盘满足任意一边,模块焊盘外侧与相邻器件的丝印框间距≥5mm; 焊盘满足任意一边且模块焊盘外侧与相邻器件的丝印框间距≥5mm 的条件, 器件丝印框至器件顶部布局种类较多,不方便采用自动的接线方式,人工接线易出错
谢谢!
5/5
2/5
3、图示
器件丝印框至器件 顶部高度≤10mm
≥5mm
3/5
4、动力线端子布局 8003
8005
8007
SMART
8003端子排:U V 8005端子排:U V
W W
R DB
S
T NP2
PE P+ R
DBR R S S T
P+ T DB
NPE U V W
8007/ SMART端子排:N P1