基于CPLD的高精度时间间隔测量系统的设计
一种基于CPLD的高精度测时方法
一种基于CPLD的高精度测时方法
邱俭军
【期刊名称】《声学技术》
【年(卷),期】2004()z1
【摘要】在分析测时误差的基础上,利用CPLD器件的高速时延特性和灵活的逻辑编程的特点,提出了新的高精度测时方法.应用该方法测时精度可达3ns,而且电路设计简单,稳定性相当好.
【总页数】3页(P319-321)
【关键词】CPLD器件;时延特性;逻辑编程;高精度测时法
【作者】邱俭军
【作者单位】中船重工第715所,311400
【正文语种】中文
【中图分类】TB5;O42
【相关文献】
1.基于MCU+CPLD的高精度频率测量方法的实现 [J], 王记昌;韩全立
2.一种基于性能退化建模的设备最优监测时机确定方法 [J], 张正新;胡昌华;周志杰;张昭
3.基于CPLD与DSP的高精度自适应频率测量方法的研究与实现 [J], 国彬;张和生
4.一种用于时差法超声波热能表的高精度测时方法 [J], 陈少华;吕晓颖;曾洁;李桂
林
5.一种用于时差法超声波流量计的高精度测时方法的实现 [J], 郑鹏;王勇
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的新型高精度超声波传感器测距系统研制
基于CPLD的新型高精度超声波传感器测距系统研制
堵俊;吴晓;华亮
【期刊名称】《仪表技术与传感器》
【年(卷),期】2008(000)011
【摘要】利用单片机技术和EDA技术各自的优点,提出了一种新颖的超声波传感器高精度测距系统设计方法.该方法采用CPLD完成超声波的产生和发射、回波接收、超声传播时间测量、盲区处理,采用单片机完成系统启停控制、距离计算、温度补偿和显示.文章完成了感测系统软硬件设计,并进行了详细的理论和实验研究.实验结果表明文中提出的设计方法精度高、重复性好、可靠性高,具有较好的应用前景.
【总页数】4页(P8-11)
【作者】堵俊;吴晓;华亮
【作者单位】南通大学电气工程学院,江苏,南通226007;南通大学电气工程学院,江苏,南通226007;南通大学电气工程学院,江苏,南通226007;浙江工业大学智能信息研究所,浙江,杭州,310032
【正文语种】中文
【中图分类】TP273
【相关文献】
1.新型高精度一体反射型超声波传感器测距系统研制 [J], 华亮;堵俊;吴晓
2.CPLD和单片机的高精度超声测距系统 [J], 程铁栋;杨丽荣
3.基于CPLD和单片机的高精度超声波测距研究 [J], 刘建生;程铁栋;杨丽荣
4.基于CPLD和单片机的高精度超声波测距研究 [J], 刘建生;程铁栋;杨丽荣
5.基于超声波传感器的高精度测距系统设计 [J], 曲春英
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD和单片机的激光测距时间间隔测量
基于CPLD和单片机的激光测距时间间隔测量
陈佳夷;伊小素
【期刊名称】《激光技术》
【年(卷),期】2008(032)004
【摘要】为了达到提高时间间隔测量精度的目的,采用复杂可编程逻辑器件和单片机实现脉冲激光测距时间间隔测量系统中的模拟内插法的方案,设计了测量系统与测试电路,并对该方案进行了验证,得到了200ps精度的时间间隔测量系统.结果表明,可编程逻辑器件的使用可大大简化电路结构,使得整个系统结构简单化.采用该设计方案的激光测距系统具有体积小、可靠性高的特点.
【总页数】4页(P363-365,369)
【作者】陈佳夷;伊小素
【作者单位】北京航空航天大学,仪器科学与光电工程学院,北京,100083;北京航空航天大学,仪器科学与光电工程学院,北京,100083
【正文语种】中文
【中图分类】P225.2
【相关文献】
1.检相式激光测距系统原理与基于CPLD的相位测量 [J], 徐恒梅;付永庆
2.基于CPLD的多目标脉冲激光测距系统的设计与实现 [J], 邢刚;许冬生;夏云
3.基于CPLD的激光测距板自动化测试系统 [J], 陈华成;叶桦;吴静
4.基于CPLD和单片机的高精度超声波测距研究 [J], 刘建生;程铁栋;杨丽荣
5.基于CPLD和单片机的高精度超声波测距研究 [J], 刘建生;程铁栋;杨丽荣
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的高精度时间间隔测量系统的设计
法 、 展 法 、 间 幅 度 转 换 法 、 标 法 。 微 电 子 技 术 的 发 扩 时 游
实 现 延 迟 线 , 是 为 了 实 现 高 精 度 测 量 , 要 数 目众 多 但 需 的抽头 , 而电路庞 大 , 得 这个技 术在 当时无 法推 广 。 因 使 随 着 半 导 体 技 术 的 发 展 ,特 别 是 大 规 模 集 成 电 路 的 发
Ab t c : A o e t me s r me t cr u t e in n r cp e s ic se i t i p p r sr t a nvl i me a ue n i i c d sg a d p n il i i d s u s d n h s a e .W i it r a p o a a in ea s t n e n l r p g t d ly h o
De i n o g r cso i e i t r a s m e s r y t m a e n sg fhih p e ii n tm n e v l a u e s s e b s d o CPLD
WANG Ja Xin 。 XI G h n J a g i a g , AN Z e g , U Xin
o i n l t o h a e i f sg a s hrug g t s n CPLD , h g p e iin s e lz d n i e n evas e s r i h r c so i r a ie i tm it r l m a u e. Me s e nt c u a y s u r n e d n a i a ur me a c r c i g a a t e i v r—
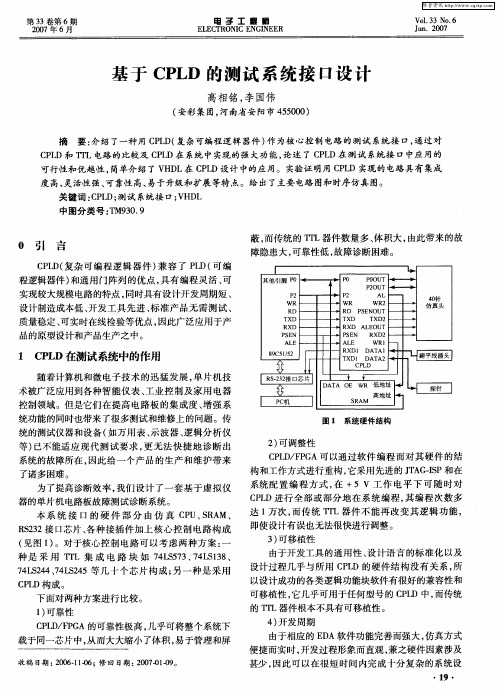
基于CPLD的测试系统接口设计
由于开 发工具 的通 用性 、 设计 语 言 的标 准 化 以及 设 计过 程几 乎与 所 用 C L 的硬 件 结 构 没 有关 系 , PD 所 以设计 成功 的各类 逻辑 功能块 软件 有很好 的兼 容性 和
7 L247 L 25等几十个芯片构成; 4 S4 、 S4 4 另一种是采用 CL P D构成 。
中图分 类号 :M9 0 9 T 3 .
0 引
言
蔽, 而传统的 m 器件数量多 、 体积大, 由此带来的故
障隐患大, 可靠性低 , 故障诊断困难。
其他引脚 P 0
P 2
W R RD TXD RXD
CL ( P D 复杂 可编程逻辑 器件 ) 兼容 了 P D( L 可编
程逻辑 器件 ) 和通 用 门阵 列 的优 点 , 有 编程 灵 活 、 具 可 实现较 大规模 电路 的特点 , 同时具有 设计 开发周 期 短 、 设计制 造成本 低 、 开发 工 具 先 进 、 准 产 品无 需测 试 、 标 质 量稳定 、 实时在 线检 验等优 点 , 可 因此广 泛应 用于 产 品的原 型设计 和产 品生产 之 中。
维普资讯
第3 3卷第 6期
20 0 7年 6月
电 子 工 套 师
ELE T C R0N C E I NGI EE N R
Vo . 3 No 6 13 .
Jn 07 u .2 0
基 于 C L 的测试 系 统接 口设 计 PD
高相铭 , 李国伟
可行性和优越性 , 简单介绍 了V D H L在 C L P D设计 中的应用。实验证明用 C L P D实现的电路具有集成
度 高、 活性 强 、 靠性 高、 灵 可 易于升 级和 扩展 等特 点 。给 出 了主要 电路 图和 时序 仿 真 图。
基于CPLD的新型高精度超声波传感器测距系统研制

超声波传感器是 测距 常用 传感器 之一 。在利 用高 性能 控 制器提高超声波测距精度方面 , 国内外 进行 了广 泛研究 。在 超 声波测距系统 中, 系统接 收信号 的大小 和质量直接取 决于发射 传感器的驱动信号 , 由于传播距 离的要求 以及超声波 空问衰减 现象… 的存在 , 传感器 的驱动 电压一般 为几 十 V到几 百 V 2。 J 对于应 用系统来说 , 般要 求传感 器频 率为 几万 H 一 z以上甚 至 上 MH . z传统 的驱 动 控制 电路采 用模 拟 电路 或单 片机控 制 信 号, 这往往难 以达 到与 传感器 频率 非常 匹配 的驱动 信号 , 而 从 影响系统的接收信号 的质量 。2 0 0 0年西安理 工大 学杨媛 等E 3 ] 研究 了基 于 C L P D的超声波驱 动控 制电路 ;0 3年程万军 等 ] 20 采用 C L P D作为超声波感测 系统 的驱动器 , 现 了液位 的高精 实 度 检测 ;04年文献 [ ] 20 5 介绍 了一种基 于 D P的超声 波传感器 S
DU J n ,W U X a ,HUA ag ’ u 。 io H n
( . no gU ies y Na tn 2 0 7 C ia 2 h a gU iesyo eh ooy Ha gh u30 3 C ia 1Na tn nv ri , no g2 60 , hn ; .Z  ̄in nvri fT c n lg , n z o 10 2, hn ) t t
t f h l a o i ,p o e s t l d z n .T e sn l h p p o e s rw su e o c nr lsata d so ft e s se ,c lu ae i o e u t s n c r c s o bi o e me t r n h i ge c i r c s o a s d t o t tr n tp o y tm o h ac lt
基于CPLD的高精度时间数字转换器的设计

到1 0 0 p s 量级 。如要进一 步提 高分辨 率则 可使 用更 高 的工艺
制程 。 在这种技术 中 , 几个延 时单 元( 一般 可以用反 相器 , 也可 以
争
r . ]
t l
l 量H
( A e r o n a u i t c s a n d A s t r o n a u i t c s E n g i n e e r i n g C o l l e g e , A i r F o r c e E n g i n e e i r n g U n i v e r s i t y , Xi ’ a n 7 1 0 0 3 8 , C h i n a )
I 量
作 l
5 -
t2
用传输线 中的一段 ) 组 成延 迟线 , 锁 存信 号沿延 迟线 的传 播信
息, 就可以用来进行时 间间隔测量 I 2 。图 1给 出了一个 延迟
I
线的例子 。每 个延 迟 单元 由 2 个 反 相 器组 成 , 每 个 输 出抽 头
c h i e v e d . T h e r e 1. a t i m e a d j u s t me n t g u a r a n t e e s t h e n i c e t y i n d i f e r e n t t e m p e r a t u r e s a n d v o l t a g e s . T h e e x p e r i m e n t d a t a s h o w s t h a t t h i s
me t h o d r e a c h e s t h e a c c u r a c y r a t e o f 2 5 0 p s , a n d t h e me a s u r e me n t r e s u l t s i n d i f f e r e n t e n v i r o n me n t a y e p r e c i s e a n d r e l i a b l e .
基于CPLD的磁致伸缩高精度时间测量系统设计
量 中。系统 的主要处理 电路更 多地 在 C P L D内部集成 , 并存传统信号处理方法的基础上增加 了感应脉 冲信 号处理 电路 , 有效地 消 除二 次回波 , 减少传感器在测量过程 中受 到的干扰 , 从而 提高 了传感 器测 量精度 和可靠性 。在系统设 计上 , 充分发 挥 C P L D 快速准确测量时 间 、 编程方便灵活的优势 , 简化电路结 构 , 提高 了时 间的测量精度 , 降低 了成本 , 易 于传感器 的小型化和 工程 化。 通过实验验证 , 时间测量的分辨率可达到 2 0 n s , 其对 应的位移 分辨率达到 0 . 0 l mm。和传统测量方法相 比, 系统 的测量 精度有 了明显 的提高 , 表明该系统可实现高精度时间测量 , 并能有效提高位移传感器 的精度 。
s i g n e d t o i mp r o v e t h e me a s u r e me n t a c c u r a c y o f t h e ma g n e t o s t r i c t i v e l i n e a r d i s p l a c e me n t s e n s o r a n d a p p l i e d t o t h e a c —
关键词 : 磁致 伸缩 ; 威德曼效应 ; 扭转波 ; C P L D; 时间测量
中图 分 类 号 : T P 2 1 6 文 献标 识 码 : A 国 家标 准 学 科 分 类 代 码 : 5 1 0 . 1 0
De s i g n o f ma g n e t 0 s t r i c t i V e h i g h pr e c i s i o n t i me me a s u r e me n t
me a s u r e me n t e r r o r i s d e c r e a s e d . C o n s e q u e n t l y , t h e me a s u r e me n t a c c u r a c y a n d r e l i a b i l i t y o f t h e s e n s o r a r e i mp r o v e d . T h e d e s i g n o f t h e s y s t e m t a k e s f u l l a d v a n t a g e o f t h e CP L D, s u c h a s f a s t a n d a c c u r a t e t i me me a s u r e me n t , c o n v e n i e n t
基于CPLD的高精度时间间隔测量系统的设计
基于CPLD的高精度时间间隔测量系统的设计
王加祥;相征;琚翔
【期刊名称】《电子技术应用》
【年(卷),期】2010(000)011
【摘要】介绍一种宽测量范围的高精度时间测量电路的实现原理和设计方法,通过CPLD内部优化的非门延迟线设计,实现了对时间的精确测量;通过不间断精确校准,保证了在不同温度下的测量精确度.实验数据分析表明,该设计能够达到300 ps的测量分辨率,不同温度环境下测量准确可靠.
【总页数】4页(P62-65)
【作者】王加祥;相征;琚翔
【作者单位】空军工程大学,工程学院,陕西,西安,710038;西安电子科技大学,通信工程学院,陕西,西安,710071;西安电子科技大学,通信工程学院,陕西,西安,710071【正文语种】中文
【中图分类】TM935.1
【相关文献】
1.基于SOPC高精度时间间隔测量系统设计与实现 [J], 任全会;曹冰
2.基于FPGA高精度时间间隔测量系统的设计与实现 [J], 刘东斌;曹闹昌;胡其明
3.基于TDC-GP2的高精度时间间隔测量系统设计 [J], 张彬彬;崔永俊;杨兵
4.基于DSP和CPLD的高精度频率测量系统设计 [J], 席鹏;李军;於二军
5.基于CPLD的磁致伸缩高精度时间测量系统设计 [J], 周翟和;汪丽群;沈超;胡佳佳
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的高精度激光测长仪的设计与实现的开题报告
基于CPLD的高精度激光测长仪的设计与实现的开题报告一、选题背景随着科技的不断进步和应用的广泛推广,激光测量已经成为各个领域的重要手段之一,其在高精度测量、三维成像、光通讯等方面具有广泛的应用前景。
在激光测量中,激光测长仪是一种非常重要的测量工具,可以用于求解物体尺寸、位置、形状等信息,广泛应用于制造、航空航天、电子、医疗等领域。
目前市场上的激光测长仪大多采用的是单片微处理器或单片DSP芯片作为核心控制芯片,其具有调试简单、成本低等优点,但需要实现的功能有限且精度不高,不适合一些高端应用场合。
因此,采用CPLD芯片来设计和实现高精度激光测长仪,可以在保证测量精度和应用效果的同时,提高系统的可靠性和实用性,具有较高的应用价值。
二、选题内容本课题以CPLD芯片为核心,采用时分复用的测量方法,设计和实现一种高精度的激光测长仪。
通过激光发射器产生激光脉冲,经过光电探头反射后,由CPLD芯片对其中加工获得的幅值信号进行处理,可以求得经过物体的时间差,从而得到物体距离的信息。
具体包括以下内容:1、激光发射器:利用激光点阵发射的方式产生激光脉冲,确保激光脉冲具有高频率和短脉冲宽度,从而保证测量精度。
2、光电探头:用于接收反射的激光脉冲,将其转化为电信号,送入CPLD芯片进行处理。
3、时分复用测量方式:采用时分多路复用方法,将不同激光脉冲的幅值信号交替输入CPLD芯片,实现多通道测量,从而提高测量的速度和精度。
4、CPLD控制:利用CPLD芯片控制激光发射器和光电探头之间的时间差,从而计算出物体的距离信息;同时,采用二分法和微调法来提高测量的精度。
三、研究目的和意义本课题以CPLD芯片为核心,设计和实现一种高精度的激光测长仪,具有以下几个方面的研究目的和意义:1、扩展激光测量的应用领域:利用CPLD芯片控制高精度的激光测长仪,可以在制造、医疗、航空航天等领域得到更加广泛的应用。
2、提高测量精度和速度:利用时分复用测量方法,同时采用二分法和微调法,可以提高测量精度和速度,特别适用于一些对测量精度要求较高的场合。
基于CPLD的高精度记录仪设计
基于CPLD的高精度记录仪设计摘要:为适应中各种信号高精度要求,本文在信号调理的基础上,设计了基于CPLD的高精度记录仪设计。
本文介绍一种采用ALTERA公司的CPLDEPM1270低电压处理器为核心的高精度多路录像机的设计。
该系统采用USB接口与PC机相连,可以迅速地进行海量的数据传输。
关键字:CPLD;高精密记录;设计引言很多记录仪系统都是由一块锂电池供电,通过一个电压下降和电压稳定电路,获得一个低噪音的电源。
在许多水下测试的情况下,测试结果不能实时地显示,必须进行数据的采集和存储,以便于以后的分析和处理。
多信道数据采集是目前的一个重要课题。
CPLD是一种具有高性能、多引脚、低功耗的集成控制和操作功能的处理器。
在保证低噪声和高精度的前提下,采用最少的电子元件和最小的封装方式,并采用耐高过载的电子设备,采用高强度的灌水技术,保证高过载条件下的线路不会出现故障。
1系统总体方案本系统以ALTERA公司研发的EPM1270GT144I5N为主要核心,AD7606为模拟信号源,DS17285时钟,8GB容量K9HCG08内存构成多路录像机。
本系统采用模拟串行方式,实现了参数的预设和USB接口的读出。
硬件部分分为模拟、数字采集和数据存储两部分[1]。
该模块包括CPLD处理器和时钟、ADC,以及存储器和USB模块。
它的工作方式是:ADC接收到外部的物理信号并将其模拟-数字变换,并将其传送至主控制器。
在读出时钟时间之后,主控单元对周边32个数字量进行扫描,然后将其写到存储器。
在系统的设计上,由于对内存的需求很大,所以使用了4块8GB的内存芯片,对内存的读取和写入进行了严格的选择。
2ICP传感信号调整电路ICP传感器是一种具有一定直流分量的模拟信号,不能直接由ADC接收,必须通过恒流供电,然后由信号处理电路进行采样.恒流源变换电路由LM134H构成,由一个升压到28V的电源和一个调整电流的二极管组成,这样既能有效地消除LM134H的温度漂移,又能保证LM134H的输出功率达到4mA,用于ICP传感器。
基于cpld的频率测量计
基于cpld的频率测量计一、引言频率是指单位时间内重复发生的事件次数,是电子工程学中经常用到的概念之一。
例如,计算机系统中的频率就是指每秒钟的时钟脉冲数量。
而在电子测试和测量领域中,频率的测量也是非常重要的。
本文将介绍一种基于CPLD(Complex Programmable Logic Device)的频率测量计,它采用了基于数字技术的方法,能够非常准确地测量输入信号的频率。
二、系统设计CPLD是一种可编程逻辑器件,它可以根据用户的需求进行逻辑设计和综合实现。
该器件具有可重复使用性强、可编程性高、芯片密度大的特点,因此被广泛用于数字电路设计中。
在该频率测量计中,我们选用了普遍使用的CPLD型号——EPM240-F100C5。
系统设计中的各个部分功能如下所示:1. 信号输入模块:该模块用于接收原始的输入信号。
它实现了输入信号的滤波和防抖,保证了输入信号的稳定性。
在该模块中,我们使用了RC滤波电路和Schmitt触发器,对输入信号进行处理,以保证信号质量。
2. 信号计数模块:该模块用于对输入信号进行计数,并通过一个计数器来实现。
当计数器的值达到一定值时,我们就可以计算出输入信号的频率。
在该模块中,我们使用了CE (Clock Enable)触发器来实现计数器的计数功能,具有同时输入时钟和使能信号的特点。
3. 数字显示模块:该模块用于将测量出的频率通过数字方式显示出来。
我们采用了常见的七段数码管进行显示。
在该模块中,我们通过对七段数码管的控制来实现数字的显示。
4. 系统控制模块:该模块用于对整个测量系统进行控制和管理。
它包括开关机控制、复位控制、频率计算等功能。
我们使用了一个简单的有限状态机(FSM)来控制这部分功能。
三、实现过程除了上述四个模块之外,该频率测量计还需要使用一些额外的器件,如RC滤波电路、Schmitt触发器、CE触发器、七段数码管等。
这些器件的选型和接线将直接影响到最终的测量结果,因此要特别注意。
CPLD和单片机的高精度超声测距系统_程铁栋
1 超声波测距的原理
超声波测距的原理一般采用回波测距法 , 即超声波 传 感器发射超声波脉冲并测量发射与接收之间的经历 时间 。
经历时间乘以声速 等于返 回回 波的阻
抗不连续处距离的两倍 :
D =ct /2
(1)
式中 ,D 为距 离 ;c 为声 波 在介 质 中传
输速率 ;t 为声波传输所经历的时间 。
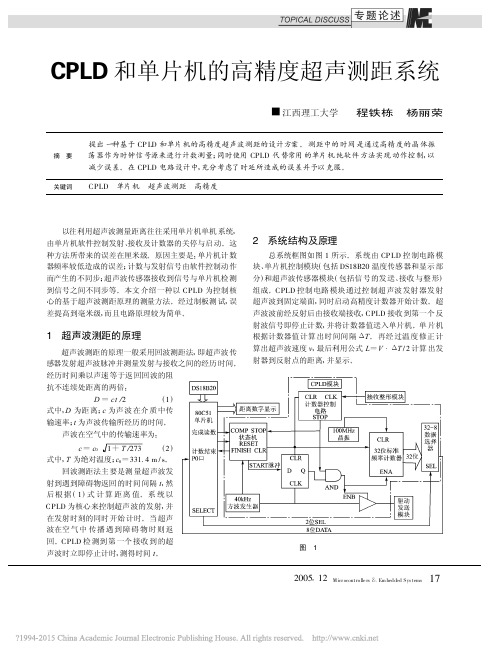
CPLD 和单片机的高精度超声测距系统
■ 江西理工大学 程铁栋 杨丽荣
摘 要 关键词
提出一种基于 CP LD 和单片机的高精度超声波测距的设计方案 。 测距中的 时间是 通过高精 度的晶 体振 荡器作为时钟信号源来进行计数测量 ;同时使用 CPLD 代替常用 的单片机 纯软件 方法实现 动作控 制 , 以 减少误差 。在 CPLD 电路设计中 ,充分考虑了时延所造成的误差并予以克服 。
在发射时刻的同时 开始 计时 。当 超声
波在空 气 中 传 播 遇 到 障 碍 物 时 则 返
回 。CPLD 检 测到 第 一个 接收 到 的超
声波时立即停止计时 ,测得时间 t 。
2 系统结构及原理
总系统框图如图 1 所示 。系 统由 CP LD 控 制电路 模 块 、单片机控制模块(包括 DS18B20 温度传感 器和显示 部 分)和超声波传感器模块(包括信 号的发 送 、接收 与整 形) 组成 。CPLD 控制 电路 模块 通过控 制超 声波 发射 器发 射 超声波到固定端面 , 同时启动高精度计数器开始计数 。超 声波波前经反射后由接收端接收 , CPLD 接收 到第一个 反 射波信号即停止计数 , 并将计数器值送入单片机 。单 片机 根据计数器值 计算 出时 间间 隔 ΔT 。 再经 过温 度 修正 计 算出超声波速度 v , 最后利用公式 L =V ΔT / 2 计算 出发 射器到反射点的距离 , 并显示 。
基于CPLD和单片机的激光测距时间间隔测量

第32卷 第4期2008年8月激 光 技 术LASER TECHNOLOGYVol .32,No .4August,2008 文章编号:100123806(2008)0420363203基于CP LD 和单片机的激光测距时间间隔测量陈佳夷,伊小素3(北京航空航天大学仪器科学与光电工程学院,北京100083)摘要:为了达到提高时间间隔测量精度的目的,采用复杂可编程逻辑器件和单片机实现脉冲激光测距时间间隔测量系统中的模拟内插法的方案,设计了测量系统与测试电路,并对该方案进行了验证,得到了200p s 精度的时间间隔测量系统。
结果表明,可编程逻辑器件的使用可大大简化电路结构,使得整个系统结构简单化。
采用该设计方案的激光测距系统具有体积小、可靠性高的特点。
关键词:测量与计量;可编程逻辑器件;单片机;激光测距;时间间隔测量;模拟内插法中图分类号:P225.2 文献标识码:AT i m e i n l m ea surem en t of l a ser rang i n g ba sed on CPLD &m i croch i pCHEN J ia 2yi,YI X iao 2su(School of I nstru ment Science &Op t o 2electr onics Engineering,Beijing University of Aer onautics and A str onautics,Beijing 100083,China )Abstract:I n order t o i m p r ove the p recisi on of ti m e interval measurement in pulsed laser ranging,several inter polati on methods are used .Anal og inter polati on ti m e 2interval measure ment has advantages of high p recisi on,s mall blind area,l ong measure ment range and good linearity .Ananal og inter polati on measure ment method using comp lex p r ogra mmable l ogic device (CP LD )and m icr ochi p was p resented .Benefiting fr om the use of CP LD,the circuit beca me si m p lified .Further more,the ti m e 2interval measure ment syste m adap ted extraordinarily t o high perfor mance portable pulsed laser rangefinder for its compactness,si m p le structure and high reliability .Key words:measurement and metr ol ogy;comp lex p r ogra mmable l ogic device;m icr ochi p;laser ranging;ti m e interval measure;anal og inter polati on method 作者简介:陈佳夷(19822),男,硕士研究生,从事激光测距方面研究。
基于CPLD的自适应高精度时统模块设计

基于CPLD的自适应高精度时统模块设计
王冶
【期刊名称】《计算机测量与控制》
【年(卷),期】2014(022)009
【摘要】通过分析影响时统模块自守时精度的因素,给出传统时统模块自守时精度低的原因,提出了基于CPLD的自适应高精度时统模块的硬件设计和CPLD逻辑设计方法;通过仿真及实际测试结果表明,基于CPLD的自适应高精度时统模块的自守时时钟与参考时钟的误差每小时小于3.6 ms,并且根据自守时精度的数学模型,通过提高晶振的频率可以提高模块的自守时精度.
【总页数】3页(P2954-2956)
【作者】王冶
【作者单位】江苏自动化研究所,江苏连云港222006
【正文语种】中文
【中图分类】TP334.2
【相关文献】
1.基于硬件锁存技术的卫星控制系统高精度时统设计 [J], 王跃;战毅;陈超
2.基于CP CI总线的时统模块测量电路设计 [J], 刘东涛;王桂强
3.基于自适应查找表法的FPGA内高精度求模取对数模块设计 [J], 徐修峰
4.基于PXI总线的高精度时统终端设计 [J], 崔明;张琦;吴志勇
5.基于PCI9052的时统模块设计 [J], 陈欢峰;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD的高精度位移测量电路的设计与实现

0 引言
旋转式光 电编 码器是 用 于角位 移测量 的最 有效 和最直 接
的数 字式 传感 器 , 分为增量编码 器和绝对编码 器。它们 的典 型 输出都是 一系列脉 冲 , 输 出信 号相位 差为 9 。实 际应用 两路 0。 中, 都是将光敏元件输出信号的放 大整形等 电路 与检测元件 组
Ab ta t Ma l t d c d ame s r gd s lc me t i ut f e ovn o e , ihu e hg - o ee h p A u 8 2 a d C L sr c : i y i r u e a u i ipa e n r i o v l g c d r whc s ih p w r dc D C 1 n P D. n no n cc r i i Frtit d c d te b c go n d me n n f hs d sg r f . n a e te s s m l cu e c a . h n te fn t n a d c aa t f i nr u e a k r u d a a ig o ti e in b e y A d g v y t s u tr h t T e c o h r e o s o h n il h e r h u i n c r c p AD C 1 d C L a nrd c d b e y Many it d c d h r w r e i f e me s r g cru t I icu e sd C L o i h u 8 2 a P D W it u e r f . il nr u e ad ae d s n o a u i i i t n ld d u e P D t n s o il o g h t n c . i lme tte dr c o i it d c u t i i tA e f a es lt na d d b g ig t te a ta i ut i i dc t a eme n mpe n e t n emu o mu . f r ot r i ai e u gn cu lcr i,t n a st t a si h i i n a n e t s w mu o n oh c i e h t 表 技 术 与 传 感 器
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业的发展对时间测量精度的要求越来越高,传统的精密时间测量技术大致有以下几种方法:直接计数法、扩展法、时间幅度转换法、游标法。
微电子技术的发展,为高集成度、低功耗、高分辨率的TDC 提供了可能。
电子学方法实现高精度时间测量的技术和原理有多种,从测量范围和测量精度上看,可以分为两大类,一类是高精度的时间测量,其测量分辨率最高可以达到几个皮秒量级,但该类时间测量电路其动态范围一般比较低;另一类为大动态范围高精度时间测量电路。
不同的应用场合对时间测量范围和测量精度提出了不同的要求。
本文介绍了一种比较折中的方法,即在低动态范围与大动态范围均可得到较佳结果的非门延迟法,此方法为时间数字化(TDC)的一种。
1 非门延迟的工作原理1.1 延迟线工作原理抽头延迟线法与差分延迟线法是随着近年来大规模集成电路的应用而发展起来的。
抽头延迟线法,也叫时延法。
从概念上说,它比较简单。
在早期,用同轴线来实现延迟线,但是为了实现高精度测量,需要数目众多的抽头,因而电路庞大,使得这个技术在当时无法推广。
随着半导体技术的发展,特别是大规模集成电路的发展,这种方法被移植到集成电路上,得到迅速推广。
抽头延迟线是由一组延迟单元组成的,理论上这组延迟单元传播时延相等,都为?子。
而时间间隔的测量就是通过关门信号Stop对开门信号Start在延迟线中的传播进行采样实现的。
抽头延迟线法的结构多种多样,下面以其中一种为例介绍[1],[2]。
图1是由专用的延迟单元和采样单元实现抽头延线法的电路原理图。
一个延迟时间为τ的单元,总是配合一个触发器FF(Flip-Flop)。
这里FF是上升沿触发而非电平触发,时间间隔T开始时Start的上升沿在延迟线中传播,结束时用Stop的上升沿对触发器进行采样。
触发器电平为高时最高位的位置就决定了测量结果,通过译码实现从时间到数字的转换。
但要实现精确测量,输入触发器时钟端的Stop 信号的时滞必须很小[4]。
该方法原理简单,但所设计传输门的长度随测量时间长度的增加而增加,长延迟线的制作和性能不能得到很好的保证,因此这种技术常常只是作为内插的基础。
在此技术基础上设计改进的方法有锁相环(PLL)法[5]、延迟锁定环(DLL)法、延迟锁定环阵列、进位链延迟法等,在各种设计中都得到一定的应用。
但此类方法设计较复杂,需要仔细的布局布线以保证所有单元的延迟相同以及每个单元的输出互连电容匹配,且应充分考虑环路的稳定性。
1.2 延迟方法在各种门电路结构中,非门是工艺结构最简单的一种门电路[3],在不考虑工艺差别的情况下,电流通过一个门电路所用的时间应为最短,本文选择非门电路作为传输线的延迟。
结构如图2所示。
为了减少延迟线长度,降低设计复杂度,利用数字电路中奇数个非门通过自身延迟则可组成一个闭环振荡器的结论,在该振荡器的基础之上设计出一个时间测量电路。
启动信号Start高电平触发,启动非门振荡器振荡输出高频频率信号,该信号经过多次分频后进入频率计数器。
当停止信号Stop进入时,触发停止振荡器并锁存振荡器、分频器、计数器结果信号。
该振荡器、分频器、计数器结果信号进行合成计算后即可得到时间值。
由于CMOS门延时振荡器与工艺参数、供电电压和温度高度相关,因此这样的振荡器需要经常校准以减小误差。
该电路中设计了校准电路,校准电路以精确的32.768 kHz时钟作为参照,每次测量前先测量精确的32.768 kHz时钟。
将32.768 kHz的时钟引入到Start/Stop引脚,启动测量基准时钟电路,测量两个上升沿之间的时差,结果存储在结果寄存器中,则单个门延迟的平均时间τ为:M1:频率计数器值M2:分频值M3:振荡环所计值X1:分频次数X2:振荡环非门数通过内部运算即可得到单个门延迟的平均时间。
在每次测量前先测量基准时钟,再测量需测时间则可得到较佳的精度,该电路在不同的CPLD芯片中得到的延迟时间不同,在ALTEAR公司的MAXII系列中的EMP570T-100C5大约为250 ps。
2 仿真实验结果将精确的32.768 kHz基准时钟通过该电路,仿真结果如图3所示。
基准时钟上升沿触发启动振荡器,振荡输出频率约为750 MHz的时钟信号,经过多次分频后进入频率计数器。
频率计数器计数结果为(0x057B),级联分频器分频值为(0b1001),振荡环所计值为(0b101)。
理论计算得出每个门延迟为226.480 6 ps。
用频率为4 MHz的待测时钟信号通过该电路,仿真结果如图4所示。
频率计数器计数结果为(0x000B),级联分频器分频值为(0b0111),振荡环所计值为(0b101)。
两个高电平之间的时间差为T=(M1×X1×2×X2+M2×2×X2+M3)×τ(ps);仿真计算得出两个高电平之间的时间差为249 808.101 8 ps。
与理论值的差为-191.898 2 ps。
仿真实验显示,该设计的分辨率优于250 ps,考虑到干扰、温度影响和器件差别,其测量分辨率应优于300 ps。
在大测量范围应用中只要增加频率计数器的计数长度则可,且不影响频率分辨率。
3 误差分析通过振荡环仿真结果局部放大图5可以看出,振荡环内部非门的延迟并非为等延迟电路。
因为CPLD内部的逻辑互联并非等延迟线,所以非门串联时的时间长度无法一致,由仿真波形观察结果已说明内部编译为非等延迟线,但Quartus II平台在CPLD综合仿真过程中已经充分考虑了门及互连进位链间的延迟,该烧写文件下载入CPLD运行结果与仿真结果几乎一样,故为了提高测量精度,可将仿真结果中每个门的延时比例带入运算过程中进行运算。
改进后用4 MHz的待测时钟信号通过该电路,仿真计算得出信号两个高电平之间的时间差为249 853.397 9 ps。
与理论值的差为-146.602 1 ps。
可见通过该方法可在一定程度上提高测量精度。
4 实验测试结果、误差分析与改进方法将32.768 kHz的基准时钟接入该电路,同时将待测信号接入该电路(以4 MHz的频率信号为例),晶体振荡器的频率稳定误差约为±20 ppm,改变测量基准脉冲的个数和外部环境温度,通过实验测试结果得出,将32.768 kHz的基准时钟接入该电路,与仿真的数据比较发现,实验数据在仿真数据之间略有波动;待测脉冲、基准脉冲的个数越多得出单个门延迟越精确;随着温度升高,单个门延迟时间变短;温度变化时,基准时钟与待测信号变化趋势一致,且存在一定的关系。
图6为不同温度下的单非门延时。
由图6可以看出,温度越高非门延迟时间越短,理论上温度越高,电子的活跃程度越大,非门延时间变短,实验结果与理论一致。
不同温度时非门延迟时间不同,故为了得到稳定精确的测量结果,不能使用相同的非门延迟,因此每次测量待测信号时先测量32.768 kHz的基准时钟,通过基准时钟计算出单个非门的延时时间,再测量待测信号,这样则可消除温度对测量精度的影响,得到精确的测量结果。
图7为不同温度下先测基准时钟、再测待测信号所测得的待测信号时间,通过此方法可以消除温度对测量精度的影响。
TDC-GP1高精度时间间隔测量芯片及其应用刘国福张玘刘波【摘要】:德国 ACAM 公司研发的高精度时间间隔测量芯片TDC-GP1,可提供两通道 250ps 或单通道 125ps 分辨率的时间间隔测量;用户可以很方便地用它构成自己的系统或仪器,因此已在多种高精度测试领域得到了应用(如高精度激光测距仪、频率和相位信号分析等)。
文章详细介绍TDC-GP1 的内部结构、工作原理和性能指标,并给出该芯片在测量门电路延迟时间方面的一个应用实例。
【作者单位】:长沙国防科技大学长沙国防科技大学长沙国防科技大学【关键词】:时间间隔测量TDC-GP单片机【分类号】:TN495【正文快照】:1 概述法,测量原理如图2 所示。
S T A R T 信号和 STOP 信号之间的时间间隔由非门的个数来决定,而非门的传输时间 TDC -GP1 主要应用于超声波流量仪、高能物理和核可以由集成电路工艺精确地确定。
同时,由于门精密时间间隔测量模块设计原理分析1 引言精密时间间隔测量是工业、国防及电力应用等方面的关键技术,脉冲计数法是时间间隔测量技术中最基本的方法[1],因此研究基于脉冲计数法的时间间隔测量技术具有重要的现实意义。
本文设计了一种高精度时间间隔测量模块,介绍了该模块的软硬件实现方法。
大量实验证明本模块可以实现对微小时间间隔的精确测量,具有很高的应用价值。
2 原理概述脉冲计数法是用标准信号形成被计数的参考时钟信号,周期为 Tref ,频率为 fref ,通过测量时间间隔Δt内参考时钟信号的个数n,直接显示Δt的值。
3 系统设计如图 1 所示,该系统主要由高频参考时钟设计,分频计数电路,控制面板和显示电路等部分组成。
由单片机实现对各部分的功能初始化软件设计,在测时结束后读取分频计数结果,按公式(1)计算出时间后送显示电路显示。
3.1 硬件设计由公式(1)可以看出,高频参考时钟是脉冲计数法时间间隔测量的关键。
为了产生低偏差低晃动的高频稳定时钟信号,本文采用高稳定度的温补振荡器TC18B 作为标准晶振输入。
3.2 软件设计系统软件包括对各工作电路的初始化设置,根据分频计数电路得到的n 值,计算时间间隔时间间隔Δt,送给显示电路显示。
流程图如图4 所示。
4 实验验证将本文研制的高精度时间间隔测量模块应用在电磁波时域反射电缆测长系统中。
根据电磁波时域反射测长原理,有如下关系式式中,Δt为发射脉冲与反射脉冲的时间间隔,L 为电缆长度,v为电磁波在电缆中的传播速度,对特定材料的电缆,波速取固定值[2],本文取v =0.192m/ns。
由关系式(2)可知,对已知材料的电缆,电缆长度L与发射脉冲与反射脉冲间时间间隔Δt 成正比。
通过对已知长度的电缆发射脉冲与反射脉冲的时间间隔进行测量,可以对时间间隔测量模块的特性进行验证。
本文对长7.01m,66.77m 和120.30m 的电缆分别进行多次测量,测量结果如表2 所示。
由实验结果可以看出,本模块测时分辨率为0.83ns,测量误差很小,完全可以满足高精度时间间隔测量要求。
5 结论本文介绍了一种高精度时间间隔测量模块的软硬件设计方法,该模块结构简单,易于实现,测时精度高。
不但可以实现对微小时间间隔的精确测量,而且在本模块的设计基础上,结合其他技术,可以实现对时间、频率以及相位的测量,具有很高的应用价值。
6 本文创新点本文设计了一种高精度时间间隔测量模块。
该模块将标准晶振锁相倍频输出 1200MHz 高频参考时钟,通过测量发射脉冲与反射脉冲间时间间隔内高频参考时钟个数,得到时间间隔Δt,测时分辨率为0.83ns。