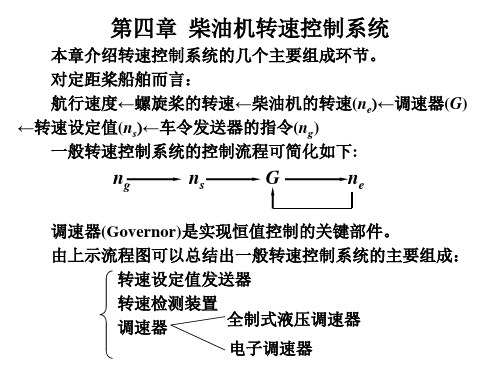
柴油机转速控制
柴油机调速原理
柴油机调速原理
柴油机调速原理是指通过控制柴油机的燃油供应量来达到稳定的转速。
柴油机的调速原理可以分为机械调速和电子调速两种方式。
机械调速是指通过机械装置来调整柴油机的转速。
主要有以下几个部件:
1. 调速器:调节柴油机进气量或燃油供应量,在不同负荷条件下使柴油机保持稳定的转速。
2. 高速调节器:根据柴油机的负荷变化,通过调整进气量或燃油供应量来保持柴油机的稳定转速。
3. 低速调节器:根据柴油机的负荷变化,通过调整燃油供应量来保持柴油机的稳定转速。
4. 调速杆:用于手动调整柴油机的转速,一般在无电力供应或故障情况下使用。
5. 空气调速器:根据机械传动系统的变化,调整进气量,以保持柴油机的稳定转速。
另外,电子调速是通过电子控制器来实现柴油机的调速。
它采用传感器感知柴油机的负荷和速度,并根据预设的调整曲线来控制燃油喷射量。
电子控制器会根据采集到的信号来调整燃油喷射系统的工作状态,确保柴油机能够保持稳定的转速。
总体而言,柴油机的调速原理通过控制燃油供应量来实现转速的稳定。
机械调速利用机械装置来调整燃油供应量,而电子调速则通过电子控制器来感知和调整燃油喷射量。
这些调速原理的应用可以提高柴油机的工作效率和稳定性。
柴油机控制器说明
校准与设定的方法有两种:
方法 1、设置前准确取得启动飞轮的齿数(由发动机生产厂提供或成套前直接数出),然后计
5
产品技术服务:广州三业科技有限公司
Tel:84003203 Fax:84470169 E-mail:syais@
算出转速信号频率,计算公式:齿数×(额定转速/分钟÷60),例如:国产 6135 机型的飞轮为
5.1.5 确认蓄电池已充有足够的电量。(启动时 12V 电源不能低于 9V、24V 电源不能低于 18V,
否则极容易造成启动部分元器件损坏)
5.1.6 确认燃油、润滑油、冷却水(水冷机组)均已达到规定的液面高度。
5.2 柴油机控制系统试运行:
5.2.2 接通控制系统电源,并合上控制箱内的控制电源开关和保险丝。电源一旦接通系统即进入
5.3.1.2 其他参数设定:每完成一项设置再按 F 键,进入下一项设置。
各项设定参数的显示顺序、形式及其代表意义如下:
显示形式
代表意义
显示形式
代表意义
PASS 密码输入▲▼F↙(上、下、左、右) 11SPLP 低速预报警(默认 1400 转)
125 齿,在发电为 50Hz 场合应用时,其转速频率应为:125×(1500÷60)=3125Hz。在“01TCAL”
状态下通过▲ ▼键使其显示数字为 3125,注意:不须↙键确认。此时计算机将把 3125Hz 作为
1500 转的对应转速信号频率记录并保存下来,作为额定转速及与转速有关的运行、保护参数的
机会将当前检测到并显示在屏幕上的转速信号频率记录并保存下来,作为额定转速及与转速有
关的运行、保护参数的基准。完成“01TCAL”操作后,再按 F 键,在“02EGSP”项确认额定转
柴油机转速不稳的原因及调整

10.机油滤清器堵塞或失效。主要原因:外部杂物或泥沙进人润滑系统;滤清器旁通阀被异物卡住呈开启状态;滤清器滤芯破损;气温过低,机油冻结。
11.增压器工作时发出高频嘶叫声。主要原因:转子与壳体装配间隙较小,转子游动量过大与壳体发生碰撞而产生嘶叫;压气机壳(铸铝)和涡轮壳体(铸铁)的螺栓或型卡箍的螺母拧紧力不足,使叶轮与壳体刮擦,叶轮损坏,叶片变形;压气机出口与进气歧管或中冷器的连接管不对中,涡轮机进口与排气歧管不对中,增压器两端壳体与中间壳体不对中,都会引起增压器壳体变形,甚至破裂。
捣缸的前兆。捣缸属破坏性较大的机械故障,除气门落缸引起捣缸外,大多是由于连杆螺栓松退引起的。连杆螺栓松退或拉伸后,连杆轴承配合间隙增大,这时在曲轴箱部位可听到\嗒嗒的敲击声,敲击声由小变大,最后连杆螺栓完全脱落或折断,连杆及轴承盖甩出,打破机体及有关零件。
断轴的前兆。当柴油机曲轴轴颈轴肩处因疲劳产生隐性裂纹时,故障征兆尚不明显,随着裂纹的扩大加重,发动机曲轴箱内发出沉闷的敲击声,转速变化时敲击声加重,发动机冒黑烟,不久,敲击声逐渐增大,发动机产生抖动,曲轴断裂,随即熄火。因此,当发动机曲轴箱内出现异常声响时,应立即停机检查。
12.润滑油回油温度超过105℃。主要原因:涡轮端的油、气密封件损坏,高温燃气进入油腔;轴承损坏。
二、柴油机正确使用与维护
1.正确启动和停车。柴油机启动后,涡轮增压器开始运转,但涡轮增压器轴承和轴颈之间建立油膜需要一定时间,只有在增压器零件温度达到正常值(60℃以上)以后,才能达到最佳润滑状态。特别是柴油机刚开始工作时,增压器内部缺油,长时间停运和换油作业后的柴油机,供油时间则更长。此时柴油机若转速急速升高或突然加载运转,在润滑不良的状况下使涡轮增压器高速运转,就会造成轴承烧结。所以柴油机启动后,应在低速工况下运转5min,中速下空转暖车,待水温和机油温度正常后,再提速加载。严禁启动后立即进人高速或猛轰油门运转。
船舶主机遥控第4章PPT课件
电动式发送器
电位器式
无触点式 自整角机变压器式
一、气动式发送器
P0
Pi
P0
手柄位置 AST STOP AH
二、电动式发送器(有触点式)
该电路包含两种发送方式:继电器式和电位器式。
该电路所描述的船舶具有两个车钟:主车钟和应急车钟。
因此,相应的车令发送器也有两套:主车令发送器和应急车令
发送器。
主车令发送器——电位器式
反馈:反馈杆32下移→回复杆38左端上翘→回复弹簧37拉
长→弯形杆上移→导阀52上移→关闭油孔f。
转速设定的减少过程与上述情况类似。
3、转速的限定 PG调速器有三个转速限定装置:
图4-3
气动低速限定36
伺服活塞的低速限定31
伺服活塞的高速限定50
气动低速限定的作用:保证柴油机在无气控信号时,能维
持最低转速运行。(相当于最低转速限制)
器 制器 制器 器 器 器 器
三、电子调速系统框图 PI调节器
U/I 电/液 变换器 执行器 主机
车令 设定 加速 发送 值限 度限
器 制器 制器
S 测速装置
§4-2 转速设定值发送器
转速设定值信号
气压信号(气动调速系统)
电压信号(电气及电子调速系统)
气动式发送器
转速设定
继电器式
值发送器
有触点式
③安全保护
当柴油机运行参数异常时,电磁阀49动作,迅速将油门拉
到最低值,并配合停车电磁阀一起,使主机迅速停车。
④升压器与放大器
升压器的作用是在起动时,加快油门的动作过程。
升压器的位置应该位于调速器的底部。
升压器每次吸入的油量决定了起动时油门的开度。
柴油机调速控制原理分解课件

执行器
根据控制器的指令调节柴 油机的供油量,从而改变 柴油机的转速和功率输出。
调速系统的工作原理
闭环控制
调速系统采用闭环控制方式,根 据柴油机的实际运行状态不断调 整供油量,使柴油机保持稳定运行。
PID控制算法
调速系统通常采用PID控制算法, 根据柴油机的转速偏差和负荷变 化计算出供油量的调整量,实现 精确控制。
04
CATALOGUE
定义
保持柴油机在负载变化时 转速恒定的控制策略。
实现方式
通过调节喷油泵供油量, 使柴油机输出扭矩与负载 扭矩平衡,从而保持转速 稳定。
应用场景
适用于需要恒定转速的负 载,如发电机、压缩机等。
极限调速控制策略
定义
在柴油机达到最高或最低转速时, 限制其继续加速或减速的控制策略。
原理
电子调速器的工作原理是基于闭环控制理论,通过不断地检 测柴油机的实际转速和设定转速的差值,经过控制算法处理 后输出控制信号,调节燃油供给量,使柴油机转速稳定在设 定值附近。
电子调速器的优点与缺点
优点
具有调节精度高、响应速度快、稳定性好、能够实现远程控制和自动化控制等 优点,可以适应不同工况和负载变化,提高柴油机的动力性和经济性。
对比诊断法 将故障柴油机与正常柴油机进行对比,通过观察 两者运转时的差异,判断故障原因。
柴油机调速系统故障排除实例分析
实例一
柴油机怠速不稳。经检查发现怠速调整不当,调整后故障排除。
实例二
柴油机游车。经检查发现调速器内部运动件磨损松旷,更换相关零 件后故障排除。
实例三
柴油机飞车。经检查发现调速器内机油过多,放出多余机油后故障 排除。
机械离心式调速器工作原理
• 当柴油机负荷减小时,转速升高,飞锤离心力增大,向外甩开, 通过调速杠杆拉动油门拉杆减小油门开度,使柴油机转速下降; 反之,当负荷增大时,转速降低,飞锤离心力减小,向内收拢, 通过调速杠杆推动油门拉杆增大油门开度,使柴油机转速上升。 如此反复调节,使柴油机在不同负荷下保持稳定转速。
柴油机调速控制原理技术介绍
液压式调速器
使用压力控制元件,将调节后的 压力传递到安装在柴油机上的调 速器,驱动机械部件从而控制柴 油机的转速。
柴油机调速控制系统
1 配电系统
负责电气传输和调度。
2 调速器系统
调节柴油机转速的部分,包括调速器本身和 阀门控制系统。
3 传感器系统
4 控制算法
用于监测柴油机的工作状态和环境参数的变 化,并将数据反馈给调速器,实现动态调节。
对收集到的监测数据进行处理,根据需求进 行合理的调整,完成柴油机的转速控制。
调速控制技术的应用
工业应用
广泛应用于重型运输、大功率 工程机械、发电机组等领域, 实现机器和设备的高效稳定运 行。
海洋工程
用于控制液压马达的输出扭矩, 驱动泵和配套设备来实现海底 修复和油气开采等任务。
农业领域
应用于各类农机设备,实现效 率优化和生产成本的控制,从 而提升产品质量和农业发展水 平。
总结和展望
总结
柴油机调速控制是实现柴油机高效稳定输出的 核心技术,广泛应用于各行业领域。
展望
未来柴油机调速控制会更加智能化、自适应化, 具备更高的精度和可靠性,为全球能源和环保 事业做出更大贡献。
柴油机调速控制原理
反馈控制原理
通过不断地检测柴油机的输出,与目标设置值进行比较,并通过调节喷油量来控制柴油机的 转速。
前馈控制原理
通过测定负载要求的改变来提前调节柴油机的转速,从而实现输出功率变化的实时调节。
调速器的分类
1
机械式调速器
使用永磁同步电机实现柴油机转速的调
电子式调速器
2
节。
使用微处理器实现机械信号的数字化处
柴油机调速控制原理技术 介绍
柴油机调速工作原理
柴油机调速工作原理
柴油机调速工作的原理是通过控制燃油供给量来调节发动机转速,从而达到稳定运转的目的。
具体步骤如下:
1. 柴油机通过喷油泵将燃油喷入气缸内,与空气混合并燃烧产生能量。
燃油供给量的控制是通过调节喷油泵的喷油量来实现的。
2. 调速器是柴油机调节转速的核心部件,它通过感应发动机转速信号,与控制器进行信息交互。
调速器能根据需要,自动调整柴油机的工作状态,使其保持在设定的转速范围内。
3. 当此时发动机工作转速低于设定值,调速器会向控制器发送信号,控制器则会调整喷油泵的运动,增加燃油供给量。
这样可以增加燃烧能量,从而提高发动机转速。
4. 当发动机工作转速高于设定值时,调速器会通过调整控制器的喷油泵工作状态,减小喷油量。
这样可以降低燃烧能量,从而减小发动机转速。
5. 调速器和控制器不断进行信息交互和调整,使发动机保持在设定的转速范围内,完成对发动机的调速控制。
通过控制燃油供给量的调整,柴油机调速工作原理实现了高效稳定的运转,能够适应不同负荷和工作条件下的需要。
柴油发电机_柴油发动机转速控制系统原理和维修

柴油发动机柴油发电机转速控制器Diesel engine diesel generator speed controller柴油机的调速Diesel engine speed一、柴油机调速One, the diesel engine speed control柴油机的不同转速是通过改变循环供油量来实现的。
Diesel engine speed by changing different fuel cycle to achieve.改变柴油机的油量调节机构,使其转速调节到规定的转速范围内就称柴油机调速。
Change engine oil amount regulating mechanism, the speed regulation to the specified speed range is called the governor for diesel engine.为了实现柴油机调速,就必须设置专门的调速装置,以便根据柴油机负荷的变化自动调节供油量,维持其规定的转速范围。
这种装置称调速器。
In order to realize diesel engine speed, we must set up a special speed regulating device, according to the diesel engine load changes automatically regulates the oil supply quantity, maintain its specified speed range. Such a device called the governor.二、调速器的类型In two, governor typen按调速范围分类According to the classification of N speed rangen按执行机构分类N actuator according to classification1、按调速范围分类In 1, according to the speed range classification①极限调速器(限速器)——只用于限制柴油机的最高转速不超过某规定值,在转速低于此规定值时不起调节作用。
柴油机调速器工作原理
柴油机调速器工作原理
柴油机调速器是控制柴油机转速的重要装置,它的工作原理对
柴油机的性能和稳定运行起着关键作用。
柴油机调速器的工作原理
主要包括机械式调速器和电子式调速器两种类型,下面将分别介绍
它们的工作原理。
机械式调速器是通过调节燃油供给量来控制柴油机的转速。
当
发动机转速下降时,调速器会感应到并通过机械装置调整供油量,
使发动机转速恢复到设定值。
这种调速器的工作原理比较简单,但
调节精度相对较低,容易受到外界环境因素的影响。
电子式调速器则是通过电子控制单元(ECU)来监测和调节柴油
机的转速。
当发动机转速发生变化时,传感器会将信号传输给ECU,ECU再通过调节喷油系统来控制燃油供给量,从而实现对发动机转
速的精准调节。
这种调速器工作原理更加精密,能够实现更高的调
节精度和稳定性。
除了以上两种基本类型的调速器,还有一些先进的调速器采用
了液压调速和机电一体化调速技术,工作原理更加复杂,但在提高
柴油机性能和燃油经济性方面具有显著优势。
总的来说,不论是机械式调速器还是电子式调速器,它们的工作原理都是通过监测和调节燃油供给量来控制柴油机的转速,从而保证柴油机在各种工况下都能够稳定运行。
随着科技的不断进步,调速器的工作原理也在不断创新和完善,为柴油机的性能提升和环保节能做出了重要贡献。
柴油机调速控制原理分解课件
常见的电子式调速器有电控调速器和电子燃油喷射系统等。
液压式调速系统
液压式调速系统是通过改变液压 油的流量来调节柴油机的转速, 通常与机械式或电子式调速系统
配合使用。
液压式调速系统调节精度高、响 应速度快,能够实现无级调速和
自动控制。
03
柴油机速控制
机械式调速系统
机械式调速系统是通过机械方式调节 喷油泵的齿杆位置来改变供油量,从 而达到调节柴油机转速的目的。
常见的机械式调速器有离心调速器和 气动调速器等。
机械式调速系统结构简单,可靠性高, 但调节精度和响应速度相对较低。
电子式调速系统
电子式调速系统是通过传感器检测柴油机的转速和负荷,并将信号传输给电子控制 器,由电子控制器根据设定的目标转速进行调节。
常见的液压式调速器有液力耦合 器和液力变矩器等。
04
柴油机速控制的用
船舶柴油机调速控制
01
船舶柴油机调速控制系统的组成
船舶柴油机调速控制系统主要由调速器、控制系统和执行机构组成。 Nhomakorabea02
船舶柴油机调速控制的作用
船舶柴油机调速控制系统的主要作用是调节柴油机的转速,以适应船舶
航行的需要,保持航行的稳定性和安全性。
调速控制系统的组成
转速传感器
控制器
用于检测柴油机转速,将转速信号转换为 电信号传递给控制器。
根据转速传感器的信号和设定的转速值, 计算出控制信号,控制执行器的动作。
执行器
反馈装置
根据控制器发出的控制信号,调节柴油机 的供油量、进气量或点火时间等参数,实 现柴油机的调速控制。
用于检测柴油机实际运行状态,将检测到 的信号反馈给控制器,形成闭环控制系统。
柴油机的调速装置课件

03
柴油机调速装置的调试和 维护
调试前的准备工作
检查调速装置的安装是否正确
01
确保调速装置的安装符合设计要求,各部件连接牢固,没有松
动现象。
清理调速装置表面
02
用干净的布擦拭调速装置表面,去除灰尘和污垢,保证调试过
程的准确性。
检查油路是否畅通
03
检查柴油机供油系统,确保油路畅通,没有堵塞或漏油现象。
02
柴油机调速装置的结构和 工作原理
调速器的结构
飞锤式调速器
由飞锤、调速弹簧、调速杠杆和 调速杆等组成,通过飞锤的离心
力作用来调节供油量。
齿杆式调速器
由齿杆、调速弹簧、滑阀和滑阀套 等组成,通过齿杆的位移来调节供 油量。
电子式调速器
由传感器、控制单元和执行器等组 成,通过传感器监测柴油机转速, 控制单元计算并发出控制指令,执 行器调节供油量。
要求
操作人员应具备严谨的工作态度和高度的责任心,能够准确判断和处理设备运 行中的异常情况,确保柴油机调速装置的安全、稳定运行。
THANKS
感谢观看
调试过程
调整怠速
根据设计要求,调整柴油机的怠速,保证其在合适的范围内。
检查调速性能
通过调整调速装置的参数,检查柴油机的调速性能是否符合要求, 确保柴油机在负载变化时能够稳定运行。
测试安全保护装置
检查调速装置的安全保护装置是否正常工作,如超速保护、过载保 护等。
维护和保养
01
02
03
定期检查
定期对调速装置进行检查 ,包括各部件的连接是否 牢固、油路是否畅通等。
调速装置的作用
调速装置的主要作用是保持柴油 机在各种工况下的稳定运转,并 能在必要时迅速降低柴油机的转 速或停车。
柴油机调速器的工作原理

柴油机调速器的工作原理
柴油机调速器的工作原理是通过自动调节燃油供给量来控制柴油机的转速,从而实现稳定的转速输出。
调速器通常由调速机构、传动装置、控制装置和执行机构组成。
1. 调速机构:调速机构主要由调速齿轮、动铰链、调速杆和卸荷松紧螺栓等组成。
调速齿轮与柴油机输出轴相连,当柴油机转速发生变化时,调速齿轮的转速也随之变化。
动铰链将调速齿轮与调速杆连接起来,调速杆通过调速机构的传动装置传递运动力给执行机构。
2. 传动装置:传动装置将调速杆的运动转化为调节燃油供给量的变化。
通常采用液压机械传动方式,调速杆通过连杆将动力传递给传动杆,传动杆再通过连杆将运动力传递给控制油泵。
3. 控制装置:控制装置通常由调速器电子控制单元(ECU)和传感器组成。
传感器会检测柴油机转速和负载情况,将这些信息传送给ECU。
ECU根据接收到的信号,计算柴油机当前的
转速与目标转速之间的差异,并控制执行机构进行相应的调节。
4. 执行机构:执行机构主要包括控制油泵和调节器。
当ECU
根据转速差异计算得出调整燃油供给量的指令后,通过控制油泵输出相应的油压,再通过调节器调整喷油嘴的工作状态。
调节器根据油泵输出的油压来调整喷油嘴的开启时间和喷油量,从而调节柴油机的燃油供给量,实现转速稳定输出。
柴油机调速器工作原理
柴油机调速器工作原理柴油机调速器是控制柴油机转速的重要装置,它的工作原理对于柴油机的性能和稳定运行起着至关重要的作用。
下面我们来详细介绍一下柴油机调速器的工作原理。
首先,柴油机调速器的工作原理基于负反馈控制系统。
当柴油机的负载发生变化时,柴油机的转速也会相应地发生变化。
调速器通过感知柴油机的转速,然后根据设定的目标转速和实际转速之间的偏差来控制燃油供给系统,使柴油机的转速保持在设定的范围内。
其次,柴油机调速器的工作原理还涉及到调速器的执行机构和控制系统。
调速器的执行机构通常是由调速器阀和执行器组成,控制系统则包括传感器、控制器和执行器。
传感器用于感知柴油机的转速,控制器根据传感器的信号和设定的目标转速来计算出调速器的控制指令,执行器则根据控制指令来调节燃油供给系统,从而实现对柴油机转速的精确控制。
另外,柴油机调速器的工作原理还涉及到调速器的调节特性。
调速器的调节特性通常包括比例控制、积分控制和微分控制三种基本控制方式。
比例控制是根据偏差的大小来调节燃油供给系统的开度,积分控制是根据偏差的积分值来调节燃油供给系统的开度,微分控制是根据偏差的变化率来调节燃油供给系统的开度。
通过这三种控制方式的组合,调速器可以实现对柴油机转速的快速、准确地调节。
最后,柴油机调速器的工作原理还需要考虑到调速器的稳定性和响应性。
调速器的稳定性是指在负载变化或环境变化的情况下,调速器能够快速、准确地调节柴油机的转速,使其保持在设定的范围内。
调速器的响应性是指调速器对于转速偏差的响应速度和精度。
良好的稳定性和响应性是保证柴油机正常运行的关键。
综上所述,柴油机调速器的工作原理是基于负反馈控制系统,通过调节燃油供给系统来实现对柴油机转速的精确控制。
它涉及到执行机构、控制系统、调节特性、稳定性和响应性等多个方面,对于柴油机的性能和稳定运行具有重要意义。
希望通过本文的介绍,读者能够更加深入地了解柴油机调速器的工作原理,为实际应用提供参考。
柴油机调速控制原理
柴油机调速控制原理1.机械调速控制:机械调速控制主要采用机械传动和机械调节元件来实现对柴油机转速的调控。
其中包括如下几个关键部分:(1)转速传感器:通过检测柴油机的转速,将转速信号送入控制系统。
(2)调速器:根据转速传感器的信号,调整调速器的作用力,使燃料喷射量的大小变化,从而实现对柴油机转速的调节。
常用的调速器有机械式机械调速器和电动式机械调速器两种。
(3)调速阀:调速阀的开度与调速器的作用力相关联,在机械调速控制中,调速阀的开度控制着燃油供给的多少,进而影响柴油机转速。
(4)燃油系统:燃油泵、喷油嘴等部件组成的燃油系统,通过调整燃油的供给量,实现对柴油机转速的控制。
2.电子调速控制:电子调速控制主要采用电子控制元件来实现对柴油机转速的调控。
其中包括如下几个关键部分:(1)转速传感器:通过检测柴油机的转速,将转速信号送入控制系统。
(2)控制电路:控制电路根据转速传感器的信号,通过对控制信号的处理,调整燃油喷射的时机和气门开启时间,进而实现对柴油机转速的调节。
(3)电子调速器:电子调速器通过对燃油喷射时机和气门开启时间的控制,实现对柴油机的转速调节。
常见的电子调速器有集成电路式电子调速器和数字式电子调速器两种。
(4)电控燃油系统:电控燃油系统通过对燃油喷射系统的控制,实现对燃油供给量的调节,从而控制柴油机的转速。
在柴油机的调速控制中,还需要考虑柴油机的负载变化。
负载的增减会导致柴油机的转速波动或下降,因此在调速控制原理中,还需要根据负载的变化,调整燃油供给量和气门开启时间,以保持柴油机的转速稳定。
总结起来,柴油机调速控制原理主要包括机械调速控制和电子调速控制两种方式。
机械调速控制主要利用机械传动和机械调节元件实现对柴油机转速的调控,电子调速控制则主要采用电子控制元件实现对柴油机转速的调控。
无论是机械调速控制还是电子调速控制,都需要根据负载的变化,调整燃油供给量和气门开启时间,以保持柴油机的转速稳定。
柴油机的调节
第一节柴油机转速的调节一、调速器的作用柴油机的不同转速是通过改变每一循环的喷油量获得的。
在一定的外界负荷条件下,供给柴油机一定燃油量,使柴油机发出的功率与外界负荷相平衡,柴油机就在某一转速下稳定运行。
船用柴油机的外界负荷是经常变动的,欲使柴油机的功率与新的外界负荷相适应,就应及时改变喷油量。
为了使柴油机在选定的转速下稳定运行,必须装有专门的调速装置─一调速器,通过它自动地改变柴油机喷油泵的喷油量,以适应外界负荷的变化。
发电柴油机要求在外界负荷(用电量)变化时能保持恒定的转速,以保证发电机输出的电压和频率恒定,满足并车及供电需要。
所以发电柴油机必须装设定速调速器,确保外界负荷变化时,柴油机的转速基本不变。
用作船舶推进的柴油机,受装载、风力、波浪及水流等影响,外负荷(船舶阻力)会忽大忽小。
但为了保证主机在特殊航行条件下(风浪中螺旋桨露出水面、断轴、掉桨)的安全,根据我国有关规定必须装“极限调速器”(简称限速器),当主机转速增至115%标定转速时自动切断燃油供给。
另外,为了避免海况变化造成的主机转速上下波动,提高柴油机的工作可靠性和工作寿命,通常都在主机上装设“全制式调速器”,使转速不随外界负荷变化而产生波动。
二、调速器的分类1.接转速调节范围分类(1)极限调速器(限速器)(2)定速调速器(单制式调速器)(3)双制式调速器(4)全制式调速器2.按作用原理分类(1)机械调速器(直接作用式):它直接利用飞铁(飞重)产生的离心力与调速弹簧张力之间的不平衡力去移动油量调节机构来稳定柴油机的转速。
其结构简单、工作可靠、维修方便,广泛用于中、小型柴油机。
其缺点是工作能力较小,不能实现恒速调节。
(2)液压调速器(间接作用式):它利用飞铁产生的离心力与调速弹簧张力之间的不平衡力去操纵液压伺服器(油压放大器),利用液压作用产生更大的动力去移动油量调节机构来调节柴油机的转速。
液压调速器转速调节范围广、调节精度高、稳定性好、通用性强,但其结构复杂、调试及维护所要求的技术较高,它广泛用于大、中型柴油机。
柴油机调速器的工作原理
柴油机调速器的工作原理一、引言柴油机是一种内燃机,它的工作原理是通过压缩空气使燃料自燃,并将产生的能量转化为机械能。
柴油机调速器是控制柴油机转速的关键组件之一,它可以根据负载变化自动调整柴油机的转速,以保持稳定的输出功率。
二、柴油机调速器的分类根据控制方式不同,柴油机调速器可以分为机械式调速器和电子式调速器两种。
1. 机械式调速器机械式调速器通常由一个双作用液压缸和一个配重组成。
当负载增加时,配重会向下移动,使液压缸向上运动,从而减小喷油泵的供油量;当负载减少时,配重会向上移动,使液压缸向下运动,增大喷油泵的供油量。
这样就可以实现自动控制柴油机转速。
2. 电子式调速器电子式调速器则采用电子控制单元(ECU)来控制喷油泵的供油量。
ECU会根据传感器获取到的信息(如转速、负载等)来计算出最佳的供油量,并通过电磁阀控制喷油泵的喷油量。
这种调速器可以更精确地控制柴油机的转速,提高燃油利用率和排放性能。
三、机械式调速器的工作原理1. 液压缸的工作原理液压缸是机械式调速器中最关键的部件之一。
它由一个活塞和一个活塞杆组成,活塞杆连接着配重和喷油泵。
当负载增加时,配重会向下移动,使液压缸上方形成一个低压区域;同时,液压缸下方形成一个高压区域。
这样就会产生一个向上的推力,使活塞上升,并将喷油泵中的供油量减小。
2. 配重的工作原理配重是机械式调速器中另一个关键部件。
它通常由几个铅块组成,可以根据需要进行添加或拆除。
当负载增加时,配重会向下移动,使液压缸上升,并减小喷油泵的供油量;当负载减少时,配重会向上移动,使液压缸下降,并增大喷油泵的供油量。
这样就可以实现自动控制柴油机的转速。
四、电子式调速器的工作原理1. 传感器的工作原理电子式调速器中需要使用一些传感器来获取柴油机的运行状态,如转速、负载、进气温度等。
这些传感器通常采用霍尔元件或电容式传感器,可以将物理量转化为电信号,并送到ECU进行处理。
2. ECU的工作原理ECU是电子式调速器中最核心的部件之一。
柴油机调速控制原理ppt课件
04
柴油机调速系统的性能评价
静态性能评价指标
调速精度
01
衡量调速系统输出转速与设定转速之间的偏差程度,以百分比
表示。
调速范围
02
调速系统能够控制的最低到最高转速的范围。
稳态误差
03
在稳定状态下,输出转速与设定转速之间的误差。
动态性能评价指标
响应速度
调速系统从接收到转速变化信号到实际转速开始变化所需的时间 。
超调量
在动态过程中,输出转速超过设定转速的最大偏差值。
调节时间
调速系统从接收到转速变化信号到实际转速稳定在新的设定值所 需的时间。
抗干扰性能评价指标
抗干扰能力
调速系统在受到外部干扰(如负载变化、电源电压波动等)时,保 持输出转速稳定的能力。
鲁棒性
调速系统对于参数摄动和外部干扰的敏感程度,鲁棒性越强,系统 越稳定。
定期清洗供油系统中的滤清器 、油管等部件,确保油路畅通 。
更换磨损件
对磨损严重的油泵、调速器等 部件进行更换,确保供油和调 速稳定。
调整油门拉杆
对油门拉杆进行调整,确保拉 杆灵活且位置正确。
06
柴油机调速控制原理实验
实验目的与要求
01
掌握柴油机调速系统的 基本组成和工作原理。
02
了解柴油机调速系统的 性能指标及评价方法。
实验步骤与操作
01
6. 实验结束
02
03
04
关闭柴油机,切断电源和燃油 供给。
清理实验现场,将工具和仪表 归位。
完成实验报告,对实验结果进 行深入分析和讨论。
实验结果与分析
根据实验数据,绘制柴油机性 能曲线图,如功率曲线、油耗 曲线等。
柴油机的调速器的原理
柴油机的调速器的原理
柴油机的调速器是控制柴油机转速的一个重要装置,其原理主要包括机械调速器和电子调速器两种。
1. 机械调速器:
机械调速器由调速手柄、调速杆、调速弹簧和调速扣等部件组成。
当柴油机运行过程中,调速手柄的位置会改变,从而引起调速杆的移动。
当发动机负荷增加时,负荷摆杆上的力也会增加,调整扩散器簧压力增加,从而在功率继电器上施加一个增加电流,进一步增加调速机构的偏心振荡,以提供增加的燃料供应。
相反,当负荷减小时,调速机构将减少燃料供应,实现对转速的控制。
2. 电子调速器:
电子调速器通过电子控制单元(ECU)来实现对柴油机转速的控制。
ECU通过传感器采集柴油机转速、负荷、温度等参数
的信息,并运用预设的算法来计算出适当的燃油喷射量与喷射时机,并通过调整喷油嘴即时控制燃料喷射的量。
ECU还可
以根据负荷的变化,及时调整控制参数,以保持柴油机的转速稳定。
总结:
柴油机的调速器可以通过机械或电子方式来控制柴油机的转速。
机械调速器通过调整燃料供应量来实现;而电子调速器则通过ECU控制燃油喷射量和喷射时机,从而实现对转速的控制。
无论是机械调速器还是电子调速器,其目的都是保持柴油机的转速稳定,以满足不同工况下的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于BP 神经网络的PID 控制在柴油机调速系统中的应用1 柴油机转速控制系统模型柴油机转速控制系统如图1 所示。
首先对柴油机模型进行简化, 同时考虑延迟并作线性化处理后,可将柴油机近似为一个一阶惯性延迟环节。
电子调速系统中的执行器采用环形电枢直流伺服电机,可认为是一个标准的二阶环节。
再加上PID 控制器,构成了完整的柴油机调速系统模型[3]。
图1 柴油机转速控制系统框图2 数学模型建立2.1柴油机转速数学模型根据达朗倍尔原理,柴油机组(包括负载)的运动方程为d c d J M M dt ω=-或d c d J M M dtω∆=∆-∆ (1)式中d M ———柴油机发出的转矩,Nm ;c M ———阻力矩,Nm ;J ———柴油机及负载变化到曲轴处的转动惯量,kg ·m2;ω———曲轴角速度,1/s 。
将相关参数代入式(1)并进行线性化,再经简化处理即可推出柴油机转速对应于喷油泵齿杆位移的传递函数,它是一个一阶惯性环节。
考虑到内燃机的工作特点,即从喷油泵齿杆位置改变到内燃机发出相应的转矩有一时间滞后过程,这一过程形成一个纯滞后环节。
所以可将柴油机近似为一个惯性环节串联一个纯滞后环节,则可得其传递函数为1()()(1)Ts n d g d g e G s T s T T s T s τ-=≈+++ (2)根据已有数据,上式可简化为21()0.1070.951n G s s s =++ (3) 2.2执行器数学模型执行器采用环形电枢直流伺服电机,可认为是一个标准的二阶环节,其方框图如图2 所示。
图2 执行环节的方框图整个执行环节的传递函数为222()()2nd g d nd ndW H s H s s W s W ξ≈++ (4)式中()g H s ———给定齿条位移ηg (t )的拉氏变换;()H s ———齿条位移η(t )的拉氏变换; nd W ———执行机构的无阻尼自然振荡角频率;d ξ———执行机构的阻尼因子。
代入相关参数,上式可简化为2()1250()501250g H s H s s s =++ (5)3 基于PID 控制的柴油机调速系统仿真3.1 PID 控制器的原理与算法常见PID 控制器的控制规律形式为:1()()[()()]tp DIde t u t K e t e t dt T T dt=++⎰(6) 相应的传递函数为:()1()(1)()p D I U s G s K T s E s T s==++ (7) 其中,p K 为比例系数,I T 为积分时间常数,D T 为微分时间常数。
根据控制系统的理论知识,可知PID 控制器中各环节的作用为:1)比例环节:成比例地减小偏差()e t ,迅速克服干扰,但却是有差调节,pK 越大,余差越小,但系统的稳定性会变差。
2)积分环节:主要用于消除余差,提高系统的无差度。
积分时间常数I T 越小,积分作用越强,克服余差的能力越高,但系统的稳定性也会越差,甚至成为不稳定的发散振荡。
3)微分环节:反映偏差()e t 的变化趋势,改善系统的动态特性,如减小超调量、缩短调节时间等。
但合适的微分时间常数D T 比较难选,偏大或偏小都会影响系统性能。
从3 个环节的作用可以看出,3 个参数p K 、I T 、D T 的值直接决定了一个控制系统的好坏。
因此,控制最主要的问题是参数的调节问题。
一般来说,比例主要用于偏差的“粗调”,保证系统的“稳”,积分和微分则主要用于偏差的“细调”,分别保证系统的“准”和“快”。
3.2 PID 参数整定由以上分析即可在Matlab-Simulink 中对上述柴油机转速控制系统进行仿真。
在Matlab-Simulink 下,基于PID 的柴油机转速控制系统如图3 所示。
图3 基于PID 的柴油机转速控制系统首先,通过试凑法确定内部只用比例环节调整的执行器系统,如图4所示。
图4 执行器内部系统当参数设为1时,系统仿真曲线如图5(a ), 当参数设置为15时,系统仿真曲线如图5(b )当参数设置为10时,可以得出效果较好,如图5(c )。
(a)(b)(c)图5 内部系统仿真曲线由于柴油机系统时一个稳定系统,只需要调整之前的系统,临界比例度法是PID 参数整定中常用的一种闭环整定方法[4]。
具体的整定步骤为:1)将积分时间常数I T 置于最大(I T = 3),微分时间常数D T 置零(D T =0),比例系数置适当的值,平衡操作一段时间,使系统投入闭环运行。
2)等系统运行稳定后,逐渐增大比例系数p K ,直到系统出现等幅振荡(即临界稳定),记录此时的临界振荡增益u K 和u T 临界振荡周期。
3)根据u K 和u T 的值,按照经验公式和控制器类型整定相应的PID 参数,然后再进行仿真校验。
整定过程中,按照“先P 后I 最后D ”的操作程序逐步将控制器整定参数调整到计算值上。
若还不够满意,可进一步调整,直到得到较好的结果为止。
设置初始参数为p K = 1,i K = 0,d K = 0(即纯比例控制),转速为1500,启动仿真,得到系统的阶跃响应曲线,如图6(a )所示。
由图6(a )可知,系统虽然能够稳定运行,但却是有静差的,而且快速性也较差,因此需要引入积分和微分环节。
根据临界比例度法的整定法则,需要逐步增大p K ,当p K =3.5时,如图6(b )所示,系统输出曲线的等幅振荡。
根据公式调整i K ,当i K =1.8时,静差减小,如图6(c )。
继续调整d K ,当d K =1.2时,减小超调量,系统趋于稳定,如图6(d )。
(a)(b)(c)(d)图6 PID 参数整定系统曲线输出4 基于BP 神经网络整定的PID 控制器设计神经网络系统亦称为人工神经网络﹐就是将人工神经元按某种方式联结组成的网络﹐用于模拟人脑神经元活动的过程﹐实现对信息的加工﹑处理﹑存储等[5]。
基于BP 神经网络的PID 控制通过训练神经网络的权系数间接地调整PID 参数[6]。
jil1x x 3x 2x pk ikdk ijw liw 输入层隐含层输出层图7 BP 网络结构网络输入层的输入为(1)()1,2,......j O x j j M == (8)式中,输入变量的个数M 取决于被控系统的复杂程度。
网络隐含层的输入输出为:(2)(2)(1)0(2)(2)()()(())(1,......)Miij jj i i net k w O O k f net k i Q ====∑ (9)式中,(2)ij w ――隐含层加权系数;上角标(1),(2),(3)分别代表输入层、隐含层和输出层。
隐含层神经元的活化函数取正负对称的Sigmoid 函数()tanh()x xx xe ef x x e e---==+ (10) 网络输出层的输入输出为:(3)(3)(2)0(3)(3)(3)1(3)2(3)3()()()(())(1,2,3)()()()Qlli i i l l pidnet k w O k O k g net k l O k k O k k O k k =======∑ (11)输出层输出节点分别对应三个可调参数,,p i d k k k 。
由于,,p i d k k k 不能为负值,所以输出层神经元的活化函数取非负的Sigmoid 函数1()(1tanh())2xx xe g x x e e-=+=+ (12) 取性能指标函数为21()(()())2E k rin k yout k =- (13) 按照梯度下降法修正网络的权系数,即按E (k )对加权系数的负梯度方向搜索调整,并附加一使搜索快速收敛全局极小的惯性项(3)(3)(3)()()(1)ij li liE k w k w k w ηα∂∆=-+∆-∂ (14)式中,η为学习速率;α为惯性系数。
(3)(3)(3)(3)(3)(3)()()()()()()()()()()l l li l l liO k net k E k E k y k u k w y k u k O k net k w ∂∂∂∂∂∂=∂∂∂∂∂∂ (15)(3)(2)(3)()()l i linet k O k w ∂=∂ (16)由于()()y k u k ∂∂未知,所以近似用符号函数()sgn()()y k u k ∂∂取代,由此带来计算不精确的影响可以通过调整学习速率η来补偿。
由式(11),可求得(3)()()(1)()l u k error k error k O k ∂=--∂ (17) (3)2()()()u k error k O k ∂=∂ (18) (3)3()()2(1)(2)()u k error k error k error k O k ∂=--+-∂ (19)上述分析可得网络输出层权的学习算法为(3)(3)(3)(2)()(1)()li li l i w k w k O k αηδ∆=∆-+ (20)(3)(3)(3)()()()sgn()(())(1,2,3)()()l l l y k u k error k g net k l u k O k δ∂∂'==∂∂ (21) 同理可得隐含层加权系数的学习算法:(2)(2)(2)(1)()(1)()ij ij i j w k w k O k αηδ∆=∆-+ (22)3(2)(2)(3)(3)1(())()(1,2......)iil li l f net k w k i Q δδ='==∑ (23)式中,2()()(1()),()(1())2g g x g x f f x ''•=-•=- (24)基于BP 网络的PID 控制器结构如图8所示,该控制器的学习算法归纳如下:图8 基于BP 网络的PID 控制器结构(1) 确定BP 网络的结构,即确定输入层节点数M 和隐含层节点数Q ,并给出各层加权系数的初值1(0)ij w 和2(0)liw ,选定学习速率η和惯性系数α,此时k =1;(2) 采样得到()rin k 和()yout k ,计算该时刻误差()()()error k rin k yout k =-; (3) 计算神经网络NN 各层神经元的输入、输出,NN 输出层的输出即为PID控制器的三个可调参数,,p i d k k k ;(4) 根据式(1)计算PID 控制器的输出u(k);(5) 进行神经网络学习,在线调整加权系数1()ij w k 和2()liw k ,实现PID 控制参数的自适应调整;(6) 置k =k +1,返回到(1)。
5 系统仿真5.1 构建BP 网PID 控制器仿真结构BP 网实现的PID 控制框图如图9所示,在此基础,将框图封装为一个模块,该模块有一个输入端,可以直接连接伺服控制中得误差信号,由输出端子1产生控制信号。