VDR 船用黑夹子ERROR_CODES
西门子wincor_sop错误代码_读卡器部分errorcode

西门子wincor_sop错误代码_读卡器部分errorcode第一篇:西门子wincor_sop错误代码_读卡器部分 error code 读卡器部分402A 极限值溢出警告,已达到参数文件中设置的极限值。
检查设备状态,必要时重设极限值。
4030 设备未初始化。
复位系统若仍出此问题,说明系统需要读卡器。
检查硬件及连线,运行自检程序,必要时更换读卡器。
断开电池接头,重接后启动系统。
4031 读卡器电源故障。
检查硬件及连线,运行自检程序,必要时更换读卡器。
4032 不正确连接,协议或连线错误。
4033 SAS校验错误,协议或连线错误。
4044 超时或V24读写时间错误,协议或连线错误。
4035 接收缓冲区太小,协议或连线错误。
4036 状态信息未定义,协议或连线错误。
以上五项:复位后若仍有此问题,检查所有物理地址与连接电缆。
4037 错误的读卡器指令。
读卡器的驱动和读卡器硬件不匹配。
检查驱动的模块号。
4038 取消指令返回A3信息。
读卡器所需硬件不完备。
4039 超时。
读卡器所需硬件不完备。
403A 协议错误:缓冲区结构不正确。
读卡器驱动和读卡器使用了不同的协议。
403B DDC返回错误信息。
检查电缆连接和DDC的版本号。
403C 读卡器硬件错误,可能缺少某种设备。
进行自检测试,有必要的话更换读卡器。
403D SAS缓冲区错误,读卡器驱动和读卡器使用的协议不同。
以上七项:复位后若仍有此问题,中止与读卡器有关的应用程序。
检查读卡器使用的硬件版本。
403E 电池电压太低。
管理员进行'电池测试'操作显示读卡器的紧急电力供应系统电压过低。
中止需要读卡器和其后备电源功能的应用程序。
可能是这些程序执行得过于频繁而导致电池没有足够时间充电。
如果这样,更换应用程序。
给读卡器所用的后备电池充电或更换它。
403F SAS地址或V24通道号设置了两次。
程序使用了不正确的地址或V24通道号地址。
检查系统中所有的SAS地址或V24通道地址。
关于智能卡cos指令错误状态返回码

SW含义
6400状态标志位未变
6581内存失败
6982不满足安全状态
6984引用数据无效
6987安全报文数据项丢失
6988安全报文数据项不正确
6A86参数P1P2不正确
6A88未找到引用数据
9303应用已被永久锁定
6700Lc不正确
6983认证方法(个人密码)锁定
6A81不支持此功能
6Cxx长度错误xx表示实际长度
6F00数据无效
6882不支持安全报文
6985不满足使用条件
6A80数据域参数不正确
6981命令与文件结构不相容6986不满足命令执行的条件(非当前EF) 6A82未找到文件
6B00参数错误(偏移地址超出了EF) 6A83未找到记录
6A84文件中存储空间不够
6D00INS不支持或错误
6E00CLA不支持或错误
63Cx验证失败,还剩下x次尝试机会6901命令不接受(无效状态) 9302MAC无效
9301金额不足
9406所需MAC和TAC不可用
9401金额不足
9402交易计数器达到最大值9403密钥索引不支持
9408应用灰锁锁定
6900不能处理
6F01公钥不完整
6F08KFL(密钥格式列表)长度不正确6F81系统错误。
rfid的纠错方法

rfid的纠错方法RFID(Radio Frequency Identification)技术是一种可靠的无线远距离识别技术,它克服了传统条形码扫描技术的缺陷,能够以更快、更准确的速度收集并记录信息。
RFID射频标签虽然可以提供可靠的识别能力,但由于一些内部和外部因素,也会导致出现识别错误。
因此,采用正确的纠错技术有助于恢复出错信息,使其变得可靠。
针对RFID系统中出现的识别错误,可采用三种常见的纠错技术:纠错码(Error Correction Code)、数据窗口(Data Window)及多标签技术(Multi-Tag)。
纠错码是一种基于数据编码的技术,它在发出的数据中冗余编码一部分信息,用以检测并纠正出错的数据。
纠错码是不可或缺的一种无线通信中的安全技术,可确保在无线通信过程中发出的信息完整可靠。
在RFID中,纠错码能有效减少由于环境因素而引起的识别错误,确保RFID系统的可靠性。
数据窗口是一种采用数据读取延迟的技术,它能够有效缓解因周围环境干扰而带来的识别错误。
在RFID系统中,每个RFID模块可以设置一个数据窗口,将识别信息暂存一段时间,以便验证,然后再最终确定是否有识别错误。
这种技术能够有效避免因交叉发射或反射而引起的错误,从而提高RFID系统的可靠性。
多标签技术是一种将多个RFID标签按指定规则同时发射的技术,从而实现对多个RFID标签的有效识别,它可以有效地减少由于单标签发射受干扰的情况,从而提高RFID系统的可靠性。
通过将多个RFID 标签按指定方案同时发射,可将信息更准确地传输至读取器,从而进一步降低识别失误的几率。
总的来说,为了提高RFID系统的可靠性,可以采用纠错码(Error Correction Code)、数据窗口(Data Window)及多标签技术(Multi-Tag)等纠错技术,使RFID系统能够在常见干扰环境下运行,避免出现识别错误。
力士乐报警代码及说明一揽

力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。
DKC?故障诊断?1?诊断信息?F?和诊断信息?E?的说明?1.1?错误诊断信息F?F205?凸轮轴故障F207?切换至未初始化运行模式?F208?UL?电机类型已变?F209?PL?装载参数默认值?F211?DISC-Error?no.1(1#错误)F212 F212 F212 DISC-Error no.2(2#错误) DISC-Error no.3(3#错误) DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器 1 故障:象限错误F230 超过编码器 1 最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器 2 故障:信号幅度错误F245 编码器 2 故障:象限错误F246 超过编码器 2 最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD 模块固件升级过程中出现错误F291 EMD 模块超时F292 EMD 模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双 MST 故障关机F402 双 MDT 故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双 SST 故障关机F434 紧停 E-STOP F629 超过正行程极限F630 超过负行程极限F634 紧停 E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器 1 故障:信号幅度错误F843 编码器 2 故障:信号幅度错误F845 编码器 2 故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v 直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2 报警诊断信息E E211 DISC-#1 报警E212 E212 E212 DISC-#2 报警 DISC-#3 报警 DISC-#4 报警 E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091 E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率 S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动261 连续电流限制预报警E263 速度指令值>极限 S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD 模块固件升级活动 EMD 模块超时 EMD 模块欠电压 Ecox 客户端数量不准确E289 等待 Ecox 服务器端扫描E291 E293 E296E386 电源模块无就绪信号E408 MDT 数据存储器 A 无效编址E409 AT 数据存储器 A 无效编址E410 客户端未被扫描或地址为0 E411 双 SST 故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停 E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2 诊断信息 B、C、D 和诊断信息 A 的说明2.1 指令诊断信息 B、C 和 DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段 3 转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT 的配置 IDN 不可配置C105 配置长度大于 MDT 最大长度C106 AT 的配置 IDN 不可配置C107 配置长度大于 AT 最大长度C108 时间片参数大于 Sercos 循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1 大于长度 MDT(S-0-0010)C112 TNcyc(S-0-0001)或 TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与 TScyc(S-0-0002)的关系错误C114 T4 大于 TScyc(S-0-0002)-T4min(S-0-0005) C115 T2 数值太小C118 MDT 配置顺序错误C200 通讯阶段 4 转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型 P-0-4014 不准确C210 要求反馈 2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈 1 数据读取错误C218 反馈 2 数据读取错误C220 反馈 1 初始化错误C221 反馈 2 初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈 1(P-0-0074)C238 编码器 2 功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位 1 类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段 4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166 和 P-0-0167D906 位移范围超出2.2 状态诊断信息 AA000 通讯阶段 0A001 通讯阶段 1A002 A003 A009 通讯阶段 2 通讯阶段 3 SERCOS 接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器 1 的位置模式A103 使用编码器 2 的位置模式A104 位置模式,无滞后,编码器 1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器 2A108 驱动器控制的插补,无滞后,编码器 1A109 驱动器控制的初步,无滞后,编码器 2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器 1, 虚拟主驱动器A113 相位同步,编码器 2. 虚拟主驱动器A114 相位同步,编码器 1. 真实主驱动器A116 相位同步,无滞后,编码器 1, 虚拟主驱动器A117 相位同步,无滞后,编码器 2, 虚拟主驱动器A118 相位同步,无滞后,编码器 1, 真实主驱动器A128 凸轮轴,编码器 1, 虚拟主驱动器A129 凸轮轴,编码器 2, 虚拟主驱动器A130 凸轮轴,编码器 1, 真实主驱动器A132 凸轮轴,无滞后,编码器 1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器 2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器 1, 真实主驱动器A150 驱动器控制的定位,编码器1 A151 驱动器控制的定位,编码器 1,无滞后A152 驱动器控制的定位,编码器2 A153 驱动器控制的定位,编码器 2,无滞后A154 编码器 1,驱动器受控的位置模式A155 编码器 1,无滞后,驱动器受控的位置模式A156 编码器 2,驱动器受控的位置模式A157 编码器 2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数P-0-4014 有误。
某型船载航行记录仪故障分析与处理

某型船载航行记录仪故障分析与处理首先对船载航行数据记录仪进行了概述,分析了某型记录仪舵角反馈信号采集部分的组成和工作原理,介绍了一起舵角反馈电压采集精度出现抖动的故障现象,并对故障原因进行了深入详细的分析,得出故障是由舵角反馈线路存在低频纹波抖动干扰引起的,针对故障原因给出了两种解决方案并进行了验证,成功排除了故障。
通过对这起故障的分析和排除,可对解决类似故障起到一定的借鉴作用。
标签:舵角采集;故障分析;船载航行数据记录仪Abstract:Firstly,the navigation data recorder on board is summarized,the composition and working principle of the rudder angle feedback signal acquisition part of a certain type of recorder are analyzed,and the fault phenomenon that the precision of rudder angle feedback voltage acquisition appears jitter is introduced. The fault is caused by the low frequency ripple jitter of the rudder angle feedback circuit. Two solutions for the fault are given and verified,and the fault is successfully eliminated. Through the analysis and elimination of the fault,it can be used for reference to solve the similar fault.Keywords:rudder angle acquisition;fault analysis;shipborne navigation data recorder1 概述船載航行数据记录仪(V oyage Data Recorder缩写VDR),俗称船用黑匣子,是专门用于记录船舶航行数据的设备,当船舶发生事故时,该数据在分析事故时起到不可替代的作用,为了船舶在发生海上事故后查明原因,从中吸取教训,采取针对性防范措施[1]。
Code命令

Code命令使用Code(代码)键来输入并改变织机参数量第一节织机的控制(code1—code10)code 1——投纬计数器清零使用本代码可使所有投纬计数器立即清零或总计数器清零,按code1以及Enter键.再按一次Enter键,可使所有投纬计数器清零,如果不要求所有投纬计数器清零,当显示器上出现“RESET ALL PICK COUNTERS?”时(所有投纬计数器清零吗?)则按‘向下’键.Code 2——预防性控制可输入5个时间周期,在这些周期里,可以对织机工作时间进行记录,在预置的时间终了之后显示屏上会出现这则信息说明哪一种预防性控制必须执行。
只有输入新的信息时,信息才会消失。
用以记录预防性控制时间的计数器,当织机运转时,织机进行计数,对剩余时间则在任何时刻都可以查核。
通过将时间清零,即可将任何一个预防性控制的计数器清除计数,按“0”及“ENTER”键。
Code 3——每班的停机次数显示器上左边数字代表实际停机次数,左边数字代表每100000次投纬发生的停机次数。
使用“”和“”键,可以显示该班发生的各种停机原因的停机次数,但显示结果只是对于计数器在上一次清零起算的时间周期内才算有效。
每班停机数字都可分别清零,请按“0”及“ENTER”键见原文45页:总停机数、断纬停机数、断经停机数、手动停机数、其它原因停机次数,所有计数器都清零吗?是的,按“ENTER”键,清零。
Code 4——停机总数使用方法同Code 3,但显示数则是五个班的总和。
Code 5——每种颜色断纬停机的百分率使用Code 5可以显示在断纬停机数字中各种颜色所占的比率,这是按照最近100次断纬停机所占的比率进行计算的。
按“COLOR”键,彩色1和彩色2的断纬停机百分率就会显示出来。
C1 21X C2 79X这样断纬停机计数器用来显示断纬停机总数中每种彩色所占的百分率,通过按“0”与“ENTER”键,即可将计数器清零。
Code 6——每个色区(区段)的断经停机百分率使用本代码可以显示每个区段的断经停机百分率,这是按最近100次断经停机进行计算的。
船舶货仓烟雾探测系统故障报警代码解析

船舶货仓烟雾探测系统故障报警代码解析船舶货仓烟雾探测系统故障报警代码的解析船舶货仓烟雾探测系统是船舶安全的重要组成部分,它能够及时侦测到货仓内的烟雾,保护货物和船员的安全。
然而,有时候该系统会出现故障,并产生一些报警代码,提醒船员进行维修和检查。
以下将对几种常见的故障报警代码进行解析,以期提供一些指导意义。
1. 故障报警代码001:传感器故障传感器故障是最常见的报警代码之一,它可能是由于传感器老化、损坏或未正确安装所导致。
当系统检测到传感器故障时,船员应首先检查传感器的连接是否稳固,避免松动导致误报。
如果连接正常,应将传感器进行检修或更换。
2. 故障报警代码002:电源故障电源故障可能导致系统无法正常工作,因此该报警代码要引起船员的高度重视。
船员应检查电源接口是否有松动或腐蚀的迹象,并确保供电稳定。
如果问题依旧存在,可能需要更换电源或寻求专业维修。
3. 故障报警代码003:信号丢失信号丢失可能是由于信号线路的损坏、干扰或者通信设备故障引起的。
船员应检查信号线路,确保连接正常且没有受到干扰。
如果问题仍然存在,可能需要修复或更换损坏的信号线路或设备。
4. 故障报警代码004:系统故障系统故障可能是由于软件或硬件方面的问题引起的,例如操作系统错误或主控板损坏。
船员应对整个系统进行全面检查,包括检查硬件和软件的工作状态。
如果无法修复,可能需要重新安装软件或更换主控板。
船舶货仓烟雾探测系统的故障报警代码可能有很多种,上述只是其中的几种常见代码。
对于船员来说,了解这些代码并及时采取适当的措施非常重要。
一方面,及时处理故障可以防止火灾等安全事故的发生;另一方面,保证系统的正常运行能够帮助船员进行货物安全管理。
因此,在船舶操作过程中,船员应积极学习和掌握船舶货仓烟雾探测系统的故障报警代码解析,随时准备应对可能出现的问题。
只有这样,才能更好地保障船舶和船员的安全。
潍柴动力专用故障码

0xa2,0x01,0x00,0x14,"0002","来自CAN的空调信号超时"0xa2,0x01,0x00,0x18,"0003","来自CAN的空调信号不可信"0xa2,0x01,0x00,0x21,"0010","模数转换器参考电压超出上限门槛值"0xa2,0x01,0x00,0x22,"0011","模数转换器参考电压低于下限门槛值"0xa2,0x01,0x00,0x24,"0012","模数转换器测试脉冲电压高出门槛值"0xa2,0x01,0x00,0x28,"0013","一定时间内只有部分数据流被转换"0xa2,0x01,0x00,0x31,"0020","HFM传感器进气温度电压值超出上限门槛值"0xa2,0x01,0x00,0x32,"0021","HFM传感器进气温度电压值低于下限门槛值"0xa2,0x01,0x00,0x41,"0030","HFM传感器平均电压值超出上限门槛值"0xa2,0x01,0x00,0x42,"0031","HFM传感器平均电压值低于下限门槛值"0xa2,0x01,0x00,0x51,"0040","空气流量比超出上限门槛值"0xa2,0x01,0x00,0x52,"0041","空气流量比低于下限门槛值"0xa2,0x01,0x00,0x61,"0050","单元时间内的空气流量超出上限门槛值"0xa2,0x01,0x00,0x62,"0051","单元时间内的空气流量低于下限门槛值"0xa2,0x01,0x00,0x71,"0060","油门踏板1电压值高出上限门槛值"0xa2,0x01,0x00,0x72,"0061","油门踏板1电压值低于下限门槛值"0xa2,0x01,0x00,0x74,"0062","油门踏板1与油门踏板2的两倍的信号关系不可信" 0xa2,0x01,0x00,0x81,"0070","油门踏板2电压值高出上限门槛值"0xa2,0x01,0x00,0x82,"0071","油门踏板2电压值低于下限门槛值"0xa2,0x01,0x00,0x84,"0072","油门踏板2与油门踏板1的1/2的信号关系不可信" 0xa2,0x01,0x00,0x91,"0080","大气压力传感器电压高出上限门槛值"0xa2,0x01,0x00,0x92,"0081","大气压力传感器电压低于下限门槛值"0xa2,0x01,0x00,0x94,"0082","来自CAN的大气压力传感器信号不可信"0xa2,0x01,0x00,0x98,"0083","大气压力传感器与进气压力传感器信号不可信"0xa2,0x01,0x00,0xa1,"0090","车速限制指示灯电源短路"0xa2,0x01,0x00,0xa2,"0091","车速限制指示灯电源短路"0xa2,0x01,0x00,0xa4,"0092","车速限制指示灯没有信号"0xa2,0x01,0x00,0xa8,"0093","车速限制指示灯超外温"0xa2,0x01,0x00,0xb8,"00a3","油门与刹车信号不可信"0xa2,0x01,0x00,0xc1,"00b0","进气量调节器正偏差超过上限门槛值"0xa2,0x01,0x00,0xd2,"00c1","进气量调节器负偏差低于下限门槛值"0xa2,0x01,0x00,0xe1,"00d0","进气加热常开故障"0xa2,0x01,0x00,0xf1,"00e0","进气加热器开时电压高于上限门槛值"0xa2,0x01,0x00,0xf2,"00e1","进气加热器开时电压低于下限门槛值"0xa2,0x01,0x01,0x01,"00f0","进气加热器闭时电压高于上限门槛值"0xa2,0x01,0x01,0x02,"00f1","进气加热器闭时电压低于下限门槛值"0xa2,0x01,0x01,0x11,"0100","进气加热器对电源短路"0xa2,0x01,0x01,0x12,"0101","进气加热器对地短路"0xa2,0x01,0x01,0x21,"0110","增压执行器电源短路故障"0xa2,0x01,0x01,0x32,"0121","增压执行器对地短路故障"0xa2,0x01,0x01,0x44,"0132","增压器没有信号"0xa2,0x01,0x01,0x48,"0133","增压器超温"0xa2,0x01,0x01,0x51,"0140","进气压力传感器电压超出上限门槛值"0xa2,0x01,0x01,0x52,"0141","进气压力传感器电压低于下限门槛值"0xa2,0x01,0x01,0x54,"0142","来自CAN的进气压力传感器信号不可信"0xa2,0x01,0x01,0x58,"0143","进气压力传感器与大气压力传感器信号不可信" 0xa2,0x01,0x01,0x61,"0150","电池电压原始值超出上限门槛"0xa2,0x01,0x01,0x62,"0151","电池电压原始值低于下限门槛"0xa2,0x01,0x01,0x74,"0162","来自CAN的刹车信号不可信"0xa2,0x01,0x01,0x78,"0163","刹车主、辅开关信号不可信"0xa2,0x01,0x01,0x81,"0170","中冷器旁通阀对电源短路"0xa2,0x01,0x01,0x82,"0171","中冷器旁通阀对地短路"0xa2,0x01,0x01,0x84,"0172","中冷器旁通阀没有信号"0xa2,0x01,0x01,0x91,"0180","冷却水水位传感器电压超出上限门槛值"0xa2,0x01,0x01,0x92,"0181","冷却水水位传感器电压低于下限门槛值"0xa2,0x01,0x01,0x94,"0182","冷却水位传感器开路"0xa2,0x01,0x01,0x98,"0183","冷却水水位传感器信号不可信"0xa2,0x01,0x01,0xa1,"0190","CRERCD电源短路"0xa2,0x01,0x01,0xa2,"0191","CRERCD地短路"0xa2,0x01,0x01,0xa4,"0192","CRERCD没有信号"0xa2,0x01,0x01,0xa8,"0193","CRERCD超温"0xa2,0x01,0x01,0xb1,"01a0","冷启动指示灯对电源短路"0xa2,0x01,0x01,0xb2,"01a1","冷启动指示灯对地短路"0xa2,0x01,0x01,0xb4,"01a2","没有冷启动指示灯信号"0xa2,0x01,0x01,0xb8,"01a3","冷启动指示灯超温"0xa2,0x01,0x01,0xc1,"01b0","冷却水温度传感器电压超出上限门槛"0xa2,0x01,0x01,0xc2,"01b1","冷却水温度传感器电压低于下限门槛"0xa2,0x01,0x01,0xc4,"01b2","来自CAN的冷却水温度传感器信号不可信"0xa2,0x01,0x01,0xc8,"01b3","冷却水温与油温信号不可信"0xa2,0x01,0x01,0xd8,"01c3","冷却水温在一定时间内没有达到最小值"0xa2,0x01,0x01,0xe8,"01d3","冷却水温在一定时间内上升幅度没有达到最小值" 0xa2,0x01,0x01,0xf1,"01e0","气缸1失火次数超过门槛值"0xa2,0x01,0x02,0x01,"01f0","气缸2失火次数超过门槛值"0xa2,0x01,0x02,0x11,"0200","气缸3失火次数超过门槛值"0xa2,0x01,0x02,0x21,"0210","气缸4失火次数超过门槛值"0xa2,0x01,0x02,0x31,"0220","气缸5失火次数超过门槛值"0xa2,0x01,0x02,0x41,"0230","气缸6失火次数超过门槛值"0xa2,0x01,0x02,0x51,"0240","多缸失火次数超过门槛值"0xa2,0x01,0x02,0x61,"0250","发动机控制单元内部错误"0xa2,0x01,0x02,0x71,"0260","压缩测试故障"0xa2,0x01,0x02,0x84,"0272","来自CAN的离合器信号不可信"0xa2,0x01,0x02,0x88,"0273","离合器状态信号不可信"0xa2,0x01,0x02,0x91,"0280","环境温度传感器电压超出上限门槛值"0xa2,0x01,0x02,0x92,"0281","环境温度传感器电压低于下限门槛值"0xa2,0x01,0x02,0x94,"0282","来自CAN的环境温度传感器信号不可信"0xa2,0x01,0x02,0xa1,"0290","环境温度传感器BET电压超出上限门槛值"0xa2,0x01,0x02,0xa2,"0291","环境温度传感器BET电压低于下限门槛值"0xa2,0x01,0x02,0xb1,"02a0","环境温度传感器CLgZn电压超出上限门槛值" 0xa2,0x01,0x02,0xb2,"02a1","环境温度传感器CLgZn电压低于下限门槛值" 0xa2,0x01,0x02,0xc1,"02b0","环境温度传感器InAir电压超出上限门槛值"0xa2,0x01,0x02,0xc2,"02b1","环境温度传感器InAir电压低于下限门槛值"0xa2,0x01,0x02,0xd8,"02c3","低怠速开关和刹车开关均激活并超过一段时间" 0xa2,0x01,0x02,0xe1,"02d0","EGR旁通阀对电源短路或超温"0xa2,0x01,0x02,0xe2,"02d1","EGR旁通阀对地短路"0xa2,0x01,0x02,0xe4,"02d2","没有EGR旁通阀信号"0xa2,0x01,0x02,0xf4,"02e2","车下启动/停止按钮卡住"0xa2,0x01,0x03,0x01,"02f0","排气管压力传感器电压超出上限门槛值"0xa2,0x01,0x03,0x02,"02f1","排气管压力传感器电压低于下限门槛值"0xa2,0x01,0x03,0x08,"02f3","排气管压力传感器信号不可信"0xa2,0x01,0x03,0x11,"0300","EGR对电源短路故障"0xa2,0x01,0x03,0x22,"0311","EGR对地短路故障"0xa2,0x01,0x03,0x34,"0322","没有EGR信号"0xa2,0x01,0x03,0x38,"0323","EGR超温"0xa2,0x01,0x03,0x41,"0330","只有凸轮轴信号,进入跛形回家状态"0xa2,0x01,0x03,0x51,"0340","没有凸轮轴信号"0xa2,0x01,0x03,0x52,"0341","凸轮轴信号不可靠"0xa2,0x01,0x03,0x61,"0350","没有曲轴信号"0xa2,0x01,0x03,0x62,"0351","曲轴信号不可信"0xa2,0x01,0x03,0x71,"0360","曲轴与凸轮轴信号偏差超出门槛值"0xa2,0x01,0x03,0x81,"0370","发动机转速超限"0xa2,0x01,0x03,0x91,"0380","排气制动蝶阀对电源短路或者超温"0xa2,0x01,0x03,0xa2,"0391","排气制动蝶阀地短路"0xa2,0x01,0x03,0xb4,"03a2","排气制动蝶阀没有信号"0xa2,0x01,0x03,0xb8,"03a3","排气制动蝶阀超温"0xa2,0x01,0x03,0xc8,"03b3","油量扭矩转化不可信"0xa2,0x01,0x03,0xd1,"03c0","燃油温度传感器电压超出上限门槛值"0xa2,0x01,0x03,0xd2,"03c1","燃油温度传感器电压超出下限门槛值"0xa2,0x01,0x03,0xe1,"03d0","风扇执行器(PWM波)对电源短路"0xa2,0x01,0x03,0xe2,"03d1","风扇执行器(PWM波)对地短路"0xa2,0x01,0x03,0xe4,"03d2","风扇执行器(PWM波)没有信号"0xa2,0x01,0x03,0xe8,"03d3","风扇执行器(PWM波)超温"0xa2,0x01,0x03,0xf1,"03e0","风扇执行器(数字信号)对电源短路"0xa2,0x01,0x03,0xf2,"03e1","风扇执行器(数字信号)对地短路"0xa2,0x01,0x04,0x01,"03f0","冷却风扇速度高出上限门槛值"0xa2,0x01,0x04,0x02,"03f1","冷却风扇速度低于下限门槛值"0xa2,0x01,0x04,0x11,"0400","燃油滤清器压差传感器电压高出上限门槛值" 0xa2,0x01,0x04,0x22,"0411","燃油滤清器压差传感器电压低于下限门槛值" 0xa2,0x01,0x04,0x38,"0423","燃油滤清器压差传感器信号不可信"0xa2,0x01,0x04,0x41,"0430","燃油滤清器加热器对电源短路"0xa2,0x01,0x04,0x42,"0431","燃油滤清器加热器对地短路"0xa2,0x01,0x04,0x51,"0440","油中有水传感器电压超出上限门槛值" 0xa2,0x01,0x04,0x62,"0451","油中有水传感器电压低于下限门槛值" 0xa2,0x01,0x04,0x74,"0462","燃油滤清器堵塞"0xa2,0x01,0x04,0x81,"0470","油中有水传感器检测到油中有水"0xa2,0x01,0x04,0x91,"0480","CAN-EngGsFlRtHtr 通讯错误"0xa2,0x01,0x04,0x92,"0481","CAN-EngGsFlRtHtr 通讯错误"0xa2,0x01,0x04,0x94,"0482","CAN-EngGsFlRtHtr 通讯错误"0xa2,0x01,0x04,0x98,"0483","CAN-EngGsFlRtHtr 通讯错误"0xa2,0x01,0x04,0xa1,"0490","CAN -RxEngTmp2Sens 通讯错误"0xa2,0x01,0x04,0xa2,"0491","CAN -RxEngTmp2Sens 通讯错误"0xa2,0x01,0x04,0xa4,"0492","CAN -RxEngTmp2Sens 通讯错误"0xa2,0x01,0x04,0xa8,"0493","CAN -RxEngTmp2Sens 通讯错误"0xa2,0x01,0x04,0xb1,"04a0","CAN -TODashDspl 通讯错误"0xa2,0x01,0x04,0xc4,"04b2","CAN-TOEBC1 通讯错误" 0xa2,0x01,0x04,0xd1,"04c0","CAN-TOERC1DR 通讯错误" 0xa2,0x01,0x04,0xe4,"04d2","CAN -TOETC1 通讯错误"0xa2,0x01,0x04,0xf4,"04e2","CAN -TOEngGsFlowR 通讯错误"0xa2,0x01,0x05,0x01,"04f0","CAN -TOHRVD 通讯错误" 0xa2,0x01,0x05,0x11,"0500","CAN -TORxAMCON 通讯错误" 0xa2,0x01,0x05,0x24,"0512","CAN-TORxCCVS 通讯错误" 0xa2,0x01,0x05,0x34,"0522","CAN-TORxEngTemp2 通讯错误" 0xa2,0x01,0x05,0x44,"0532","CAN-TOTCO1 通讯错误" 0xa2,0x01,0x05,0x51,"0540","CAN-TOTF 通讯错误" 0xa2,0x01,0x05,0x61,"0550","CAN -OTSC1AE 通讯错误" 0xa2,0x01,0x05,0x64,"0552","CAN -OTSC1AE 通讯错误" 0xa2,0x01,0x05,0x71,"0560","CAN -TOTSC1AR 通讯错误"0xa2,0x01,0x05,0x74,"0562","CAN -TOTSC1AR 通讯错误" 0xa2,0x01,0x05,0x81,"0570","CAN-TOTSC1DE 通讯错误" 0xa2,0x01,0x05,0x84,"0572","CAN-TOTSC1DE 通讯错误" 0xa2,0x01,0x05,0x91,"0580","CAN -TOTSC1DR 通讯错误" 0xa2,0x01,0x05,0x94,"0582","CAN -TOTSC1DR 通讯错误" 0xa2,0x01,0x05,0xa1,"0590","CAN-TOTSC1PE 通讯错误" 0xa2,0x01,0x05,0xa2,"0591","CAN-TOTSC1PE 通讯错误" 0xa2,0x01,0x05,0xb1,"05a0","CAN-TOTSC1TE 通讯错误" 0xa2,0x01,0x05,0xb4,"05a2","CAN-TOTSC1TE 通讯错误" 0xa2,0x01,0x05,0xc1,"05b0","CAN -TOTSC1TR 通讯错误" 0xa2,0x01,0x05,0xc4,"05b2","CAN -TOTSC1TR 通讯错误" 0xa2,0x01,0x05,0xd1,"05c0","CAN-TOTSC1VE 通讯错误" 0xa2,0x01,0x05,0xd4,"05c2","CAN-TOTSC1VE 通讯错误" 0xa2,0x01,0x05,0xe1,"05d0","CAN-TOTSC1VR 通讯错误" 0xa2,0x01,0x05,0xe4,"05d2","CAN-TOTSC1VR 通讯错误" 0xa2,0x01,0x05,0xf1,"05e0","CAN -TOTimeDate 通讯错误"0xa2,0x01,0x06,0x04,"05f2","CAN -TOWSI 通讯错误" 0xa2,0x01,0x06,0x14,"0602","CAN -TxTO通讯错误" 0xa2,0x01,0x06,0x21,"0610","档位提升间隙时间过长"0xa2,0x01,0x06,0x31,"0620","指示灯1电源短路"0xa2,0x01,0x06,0x32,"0621","指示灯1地短路"0xa2,0x01,0x06,0x34,"0622","指示灯1没有信号"0xa2,0x01,0x06,0x38,"0623","指示灯1超温"0xa2,0x01,0x06,0x41,"0630","指示灯2电源短路"0xa2,0x01,0x06,0x42,"0631","指示灯2地短路"0xa2,0x01,0x06,0x44,"0632","指示灯2没有信号"0xa2,0x01,0x06,0x48,"0633","指示灯2超温"0xa2,0x01,0x06,0x51,"0640","指示灯3电源短路"0xa2,0x01,0x06,0x52,"0641","指示灯3地短路"0xa2,0x01,0x06,0x54,"0642","指示灯3没有信号"0xa2,0x01,0x06,0x58,"0643","指示灯3超温"0xa2,0x01,0x06,0x61,"0650","CJ940通讯受干扰"0xa2,0x01,0x06,0x71,"0660","EEPROM报警"0xa2,0x01,0x06,0x72,"0661","EEPROM读错误"0xa2,0x01,0x06,0x74,"0662","EEPROM写错误"0xa2,0x01,0x06,0x78,"0663","EEPROM使用替代值"0xa2,0x01,0x06,0x88,"0673","系统修复故障"0xa2,0x01,0x06,0x98,"0683","系统修复故障"0xa2,0x01,0x06,0xa8,"0693","系统修复故障"0xa2,0x01,0x06,0xb1,"06a0","CJ940电压过高"0xa2,0x01,0x06,0xc2,"06b1","CJ940电压过低"0xa2,0x01,0x06,0xd1,"06c0","空气湿度传感器电压超出上限门槛值"0xa2,0x01,0x06,0xd2,"06c1","空气湿度传感器电压低于下限门槛值"0xa2,0x01,0x06,0xe1,"06d0","进气温度传感器电压超出上限门槛值"0xa2,0x01,0x06,0xe2,"06d1","进气温度传感器电压低于下限门槛值"0xa2,0x01,0x06,0xe4,"06d2","来自CAN进气温度传感器电压信号不可信" 0xa2,0x01,0x06,0xf1,"06e0","理想喷油次数受电流限制"0xa2,0x01,0x06,0xf2,"06e1","理想喷油次数受油量限制"0xa2,0x01,0x06,0xf4,"06e2","理想喷油次数受软件限制"0xa2,0x01,0x07,0x01,"06f0","1、2、3缸中某喷油器高端与电源或地短路" 0xa2,0x01,0x07,0x02,"06f1","1、2、3缸中某喷油器低端与地短路"0xa2,0x01,0x07,0x04,"06f2","看实际应用情况"0xa2,0x01,0x07,0x08,"06f3","没有标定的错误"0xa2,0x01,0x07,0x11,"0700","看实际应用情况"0xa2,0x01,0x07,0x12,"0701","看实际应用情况"0xa2,0x01,0x07,0x14,"0702","1、2、3缸中某喷油器断路"0xa2,0x01,0x07,0x18,"0703","看实际应用情况"0xa2,0x01,0x07,0x21,"0710","4、5、6缸中某喷油器高端与电源或地短路" 0xa2,0x01,0x07,0x22,"0711","4、5、6缸中某喷油器低端与地短路"0xa2,0x01,0x07,0x24,"0712","看实际应用情况"0xa2,0x01,0x07,0x28,"0713","没有标定的错误"0xa2,0x01,0x07,0x31,"0720","看实际应用情况"0xa2,0x01,0x07,0x32,"0721","看实际应用情况"0xa2,0x01,0x07,0x34,"0722","4、5、6缸中某喷油器断路"0xa2,0x01,0x07,0x38,"0723","看实际应用情况"0xa2,0x01,0x07,0x41,"0730","CY33X内部重新起动/时钟丢失/电压太高" 0xa2,0x01,0x07,0x42,"0731","CY33X没有被锁定/初始化错误"0xa2,0x01,0x07,0x44,"0732","CY33X工作在测试模式下"0xa2,0x01,0x07,0x48,"0733","CY33X SPI通讯错误"0xa2,0x01,0x07,0x51,"0740","CY33X内部奇偶错误"0xa2,0x01,0x07,0x52,"0741","CY33X程序错误"0xa2,0x01,0x07,0x54,"0742","CY33X check of inv. YSEL"0xa2,0x01,0x07,0x58,"0743","某缸的CY33X不工作"0xa2,0x01,0x07,0x61,"0750","喷油器1低端与电源短路"0xa2,0x01,0x07,0x62,"0751","看实际应用情况"0xa2,0x01,0x07,0x64,"0752","喷油器1高端与低端短路"0xa2,0x01,0x07,0x68,"0753","没有标定的错误"0xa2,0x01,0x07,0x71,"0760","看实际应用情况"0xa2,0x01,0x07,0x72,"0761","看实际应用情况"0xa2,0x01,0x07,0x74,"0762","喷油器1开路"0xa2,0x01,0x07,0x78,"0763","看实际应用情况"0xa2,0x01,0x07,0x81,"0770","喷油器2低端与电源短路" 0xa2,0x01,0x07,0x82,"0771","看实际应用情况"0xa2,0x01,0x07,0x84,"0772","喷油器2高端与低端短路" 0xa2,0x01,0x07,0x88,"0773","没有标定的错误"0xa2,0x01,0x07,0x91,"0780","看实际应用情况"0xa2,0x01,0x07,0x92,"0781","看实际应用情况"0xa2,0x01,0x07,0x94,"0782","喷油器2开路"0xa2,0x01,0x07,0x98,"0783","看实际应用情况"0xa2,0x01,0x07,0xa1,"0790","喷油器3低端与电源短路" 0xa2,0x01,0x07,0xa2,"0791","看实际应用情况"0xa2,0x01,0x07,0xa4,"0792","喷油器3高端与低端短路" 0xa2,0x01,0x07,0xa8,"0793","没有标定的错误"0xa2,0x01,0x07,0xb1,"07a0","看实际应用情况"0xa2,0x01,0x07,0xb2,"07a1","看实际应用情况"0xa2,0x01,0x07,0xb4,"07a2","喷油器3开路"0xa2,0x01,0x07,0xb8,"07a3","看实际应用情况"0xa2,0x01,0x07,0xc1,"07b0","喷油器4低端与电源短路" 0xa2,0x01,0x07,0xc2,"07b1","看实际应用情况"0xa2,0x01,0x07,0xc4,"07b2","喷油器4高端与低端短路" 0xa2,0x01,0x07,0xc8,"07b3","没有标定的错误"0xa2,0x01,0x07,0xd1,"07c0","看实际应用情况"0xa2,0x01,0x07,0xd2,"07c1","看实际应用情况"0xa2,0x01,0x07,0xd4,"07c2","喷油器4开路"0xa2,0x01,0x07,0xd8,"07c3","看实际应用情况"0xa2,0x01,0x07,0xe1,"07d0","喷油器5低端与电源短路"0xa2,0x01,0x07,0xe2,"07d1","看实际应用情况"0xa2,0x01,0x07,0xe4,"07d2","喷油器5高端与低端短路"0xa2,0x01,0x07,0xe8,"07d3","没有标定的错误"0xa2,0x01,0x07,0xf1,"07e0","看实际应用情况"0xa2,0x01,0x07,0xf2,"07e1","看实际应用情况"0xa2,0x01,0x07,0xf4,"07e2","喷油器5开路"0xa2,0x01,0x07,0xf8,"07e3","看实际应用情况"0xa2,0x01,0x08,0x01,"07f0","喷油器6低端与电源短路"0xa2,0x01,0x08,0x02,"07f1","看实际应用情况"0xa2,0x01,0x08,0x04,"07f2","喷油器6高端与低端短路"0xa2,0x01,0x08,0x08,"07f3","没有标定的错误"0xa2,0x01,0x08,0x11,"0800","看实际应用情况"0xa2,0x01,0x08,0x12,"0801","看实际应用情况"0xa2,0x01,0x08,0x14,"0802","喷油器6开路"0xa2,0x01,0x08,0x18,"0803","看实际应用情况"0xa2,0x01,0x08,0x21,"0810","正常工作的气缸数小于系统运转所需的最小缸数" 0xa2,0x01,0x08,0x22,"0811","未用"0xa2,0x01,0x08,0x24,"0812","未用"0xa2,0x01,0x08,0x28,"0813","未用"0xa2,0x01,0x08,0x38,"0823","巡航信号不可靠"0xa2,0x01,0x08,0x41,"0830","故障灯与电源短路"0xa2,0x01,0x08,0x42,"0831","故障灯与地短路"0xa2,0x01,0x08,0x44,"0832","故障灯没有信号"0xa2,0x01,0x08,0x48,"0833","故障灯超温"0xa2,0x01,0x08,0x51,"0840","主继电器2对电源短路"0xa2,0x01,0x08,0x52,"0841","主继电器2对地短路"0xa2,0x01,0x08,0x61,"0850","巡航开关对电源短路"0xa2,0x01,0x08,0x62,"0851","巡航开关对地短路"0xa2,0x01,0x08,0x68,"0853","巡航开关信号不可信"0xa2,0x01,0x08,0x71,"0860","主继电器1电源短路"0xa2,0x01,0x08,0x82,"0871","主继电器1地短路"0xa2,0x01,0x08,0x98,"0883","系统通讯故障"0xa2,0x01,0x08,0xa1,"0890","CAN通讯错误"0xa2,0x01,0x08,0xb1,"08a0","CAN通讯错误"0xa2,0x01,0x08,0xc1,"08b0","CAN通讯错误"0xa2,0x01,0x08,0xd1,"08c0","机油液位传感器电压电压超出上限"0xa2,0x01,0x08,0xd2,"08c1","机油液位传感器电压电压低于下限"0xa2,0x01,0x08,0xd4,"08c2","来自CAN的机油液位传感器信号不可靠" 0xa2,0x01,0x08,0xd8,"08c3","机油液位传感器信号不可靠"0xa2,0x01,0x08,0xe1,"08d0","机油压力传感器电压电压超出上限"0xa2,0x01,0x08,0xe2,"08d1","机油压力传感器电压电压低于下限"0xa2,0x01,0x08,0xe4,"08d2","机油压力传感器信号不可靠"0xa2,0x01,0x08,0xe8,"08d3","机油压力过高或机油温度信号不可靠"0xa2,0x01,0x08,0xf8,"08e3","机油压力过低"0xa2,0x01,0x09,0x01,"08f0","机油温度传感器电压超出上限门槛值"0xa2,0x01,0x09,0x02,"08f1","机油温度传感器电压低于下限门槛值"0xa2,0x01,0x09,0x04,"08f2","来自CAN的机油温度传感器信号不可信" 0xa2,0x01,0x09,0x08,"08f3","机油温度与冷却水温度信号"0xa2,0x01,0x09,0x18,"0903","机油温度与冷却水温度信号"0xa2,0x01,0x09,0x21,"0910","喷油器加电时间超出超速监视器设定值"0xa2,0x01,0x09,0x31,"0920","发动机转速不可信"0xa2,0x01,0x09,0x41,"0930","压力调节正偏差超出上限"0xa2,0x01,0x09,0x52,"0941","压力调节负偏差低于下限"0xa2,0x01,0x09,0x61,"0950","电动燃油泵对电源短路"0xa2,0x01,0x09,0x62,"0951","电动燃油泵对地短路"0xa2,0x01,0x09,0x64,"0952","电动燃油泵断路"0xa2,0x01,0x09,0x68,"0953","电动燃油泵超温"0xa2,0x01,0x09,0x78,"0963","加速测试错误"0xa2,0x01,0x09,0x82,"0971","看门狗开关错误"0xa2,0x01,0x09,0x84,"0972","冗余断缸测试电压超出上限"0xa2,0x01,0x09,0x88,"0973","冗余断缸测试电压低于下限"0xa2,0x01,0x09,0x91,"0980","传感器电源1电压超出上限门槛值"0xa2,0x01,0x09,0x92,"0981","传感器电源1电压低于下限门槛值"0xa2,0x01,0x09,0xa1,"0990","传感器电源2电压超出上限门槛值"0xa2,0x01,0x09,0xa2,"0991","传感器电源2电压低于下限门槛值"0xa2,0x01,0x09,0xb1,"09a0","传感器电源3电压超出上限门槛值"0xa2,0x01,0x09,0xb2,"09a1","传感器电源3电压低于下限门槛值"0xa2,0x01,0x09,0xc1,"09b0","断缸测试故障"0xa2,0x01,0x09,0xd1,"09c0","系统灯电源短路"0xa2,0x01,0x09,0xd2,"09c1","系统灯地短路"0xa2,0x01,0x09,0xd4,"09c2","没有系统灯信号"0xa2,0x01,0x09,0xd8,"09c3","系统灯超温"0xa2,0x01,0x09,0xe4,"09d2","T15信号错误"0xa2,0x01,0x09,0xf1,"09e0","T50接通时间超限"0xa2,0x01,0x0a,0x08,"09f3","时间处理器与系统计时器间的时间偏差超出门槛值" 0xa2,0x01,0x0a,0x11,"0a00","空气节流阀对电源短路"0xa2,0x01,0x0a,0x22,"0a11","空气节流阀对地短路"0xa2,0x01,0x0a,0x34,"0a22","空气节流阀没有信号"0xa2,0x01,0x0a,0x38,"0a23","空气节流阀超温"0xa2,0x01,0x0a,0x41,"0a30","车速1高于最大门槛值"0xa2,0x01,0x0a,0x42,"0a31","VSS或SPS传感器信号失效"0xa2,0x01,0x0a,0x44,"0a32","车速1的HW信号不可信"0xa2,0x01,0x0a,0x48,"0a33","车速1与喷油量及发动机转速不可信" 0xa2,0x01,0x0a,0x51,"0a40","车速2传感器电压高出上限门槛值" 0xa2,0x01,0x0a,0x52,"0a41","车速2传感器电压低于下限门槛值" 0xa2,0x01,0x0a,0x54,"0a42","来自CAN的车速信号无效"0xa2,0x01,0x0a,0x58,"0a43","车速2传感器电压信号不可信"0xa2,0x01,0x0a,0x61,"0a50","车速3信号脉宽超过上限门槛值"0xa2,0x01,0x0a,0x62,"0a51","车速3信号脉宽低于下限门槛值"0xa2,0x01,0x0a,0x64,"0a52","车速信号平均周期小于门槛值"0xa2,0x01,0x0a,0x74,"0a62","CAN通讯错误"0xa2,0x01,0x0a,0x78,"0a63","CAN通讯错误"0xa2,0x01,0x0a,0x88,"0a73","SPI通讯错误"0xa2,0x01,0x0a,0x91,"0a80","故障指示灯电源短路"0xa2,0x01,0x0a,0x92,"0a81","故障指示灯对地短路"0xa2,0x01,0x0a,0x94,"0a82","没有故障指示灯信号"0xa2,0x01,0x0a,0x98,"0a83","故障指示灯超温"0xa2,0x01,0x0a,0xa1,"0a90","空调压缩机对电源短路"0xa2,0x01,0x0a,0xa2,"0a91","空调压缩机对地短路"0xa2,0x01,0x0a,0xa4,"0a92","空调压缩机没有信号"0xa2,0x01,0x0a,0xa8,"0a93","空调压缩机超温"0xa2,0x01,0x0a,0xb1,"0aa0","BPA的AD转换信号超出上限"0xa2,0x01,0x0a,0xb2,"0aa1","BPA的AD转换信号低于下限"0xa2,0x01,0x0a,0xb4,"0aa2","BPA信号错误"0xa2,0x01,0x0a,0xc1,"0ab0","高压测试错误"0xa2,0x01,0x0a,0xd4,"0ac2","燃油计量器开路"0xa2,0x01,0x0a,0xd8,"0ac3","燃油计量器超温"0xa2,0x01,0x0a,0xe1,"0ad0","燃油计量器电源短路"0xa2,0x01,0x0a,0xf2,"0ae1","燃油计量器对地短路"0xa2,0x01,0x0b,0x01,"0af0","燃油计量器电压超过上限"0xa2,0x01,0x0b,0x02,"0af1","燃油计量器电压低于下限"0xa2,0x01,0x0b,0x11,"0b00","共轨泻压阀打开"0xa2,0x01,0x0b,0x12,"0b01","轨压要求时间超限"0xa2,0x01,0x0b,0x14,"0b02","压力波动时共轨泻压阀没有打开"0xa2,0x01,0x0b,0x21,"0b10","共轨泻压阀打开次数超出技术要求的最大次数"0xa2,0x01,0x0b,0x31,"0b20","轨压传感器电压超出上限门槛值"0xa2,0x01,0x0b,0x32,"0b21","轨压传感器电压低于下限门槛值"0xa2,0x01,0x0b,0x41,"0b30","轨压传感器电压超出最大偏差"0xa2,0x01,0x0b,0x42,"0b31","轨压传感器电压低于最小偏差"0xa2,0x01,0x0b,0x51,"0b40","轨压偏差超出上限门槛值"0xa2,0x01,0x0b,0x61,"0b50","轨压偏差超出上限门槛值并且喷油量超限"0xa2,0x01,0x0b,0x71,"0b60","轨压偏差低于下限门槛值并且喷油量低于门槛值"0xa2,0x01,0x0b,0x81,"0b70","轨压峰值低于下限门槛值"0xa2,0x01,0x0b,0x91,"0b80","轨压峰值超出上限门槛值"0xa2,0x01,0x0b,0xa1,"0b90","轨压下降过快"0xa2,0x01,0x0b,0xb1,"0ba0","超速模式下的油量剂量单元设定不可信"0xa2,0x01,0x0b,0xc1,"0bb0","燃油计量器中的油量超过门槛值"0xa2,0x01,0x0b,0xd1,"0bc0","轨压偏差超出门槛值并且燃油计量器中的油量超过门槛值"0xa2,0x01,0x0b,0xe1,"0bd0","12V传感器电源电压超过上限门槛值"0xa2,0x01,0x0b,0xe2,"0bd1","12V传感器电源低于下限门槛值"0xa2,0x01,0x0b,0xf1,"0be0","起动电机高端电源短路"0xa2,0x01,0x0b,0xf2,"0be1","起动电机高端对地短路"0xa2,0x01,0x0c,0x01,"0bf0","起动电机低端电源短路"0xa2,0x01,0x0c,0x02,"0bf1","起动电机低端对地短路"0xa2,0x01,0x0c,0x04,"0bf2","起动电机开路"0xa2,0x01,0x0c,0x11,"0c00","水温传感器工作正常但水温超出门槛值"0xa2,0x01,0x0c,0x21,"0c10","空转时,识别油量计量单元的变量修正错误"0xa2,0x01,0x0c,0x31,"0c20","制动开关错误的识别错误"0xa2,0x01,0x0c,0x41,"0c30","制动踏板踩下前,巡航控制抑制错误"0xa2,0x01,0x0c,0x51,"0c40","巡航控制要求的识别错误,使得故障灯常亮"0xa2,0x01,0x0c,0x61,"0c50","远程油门踏板1输出电压值超出上限" 0xa2,0x01,0x0c,0x62,"0c51","远程油门踏板1输出电压值低于下限" 0xa2,0x01,0x0c,0x64,"0c52","远程油门踏板1与远程油门踏板2的2倍的信号关系不可信" 0xa2,0x01,0x0c,0x71,"0c60","远程油门踏板2输出电压值超出上限" 0xa2,0x01,0x0c,0x72,"0c61","远程油门踏板2输出电压值低于下限" 0xa2,0x01,0x0c,0x74,"0c62","远程油门踏板2与远程油门踏板1的1/2的信号关系不可信"。
emhart错误信息代码
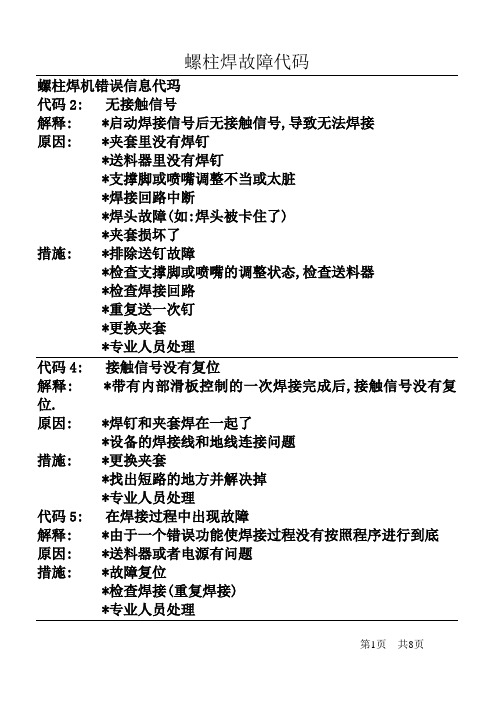
螺柱焊机错误信息代玛代码2: 无接触信号解释: *启动焊接信号后无接触信号,导致无法焊接原因: *夹套里没有焊钉*送料器里没有焊钉*支撑脚或喷嘴调整不当或太脏*焊接回路中断*焊头故障(如:焊头被卡住了)*夹套损坏了措施: *排除送钉故障*检查支撑脚或喷嘴的调整状态,检查送料器*检查焊接回路*重复送一次钉*更换夹套*专业人员处理代码4: 接触信号没有复位解释: *带有内部滑板控制的一次焊接完成后,接触信号没有复位.原因: *焊钉和夹套焊在一起了*设备的焊接线和地线连接问题措施: *更换夹套*找出短路的地方并解决掉*专业人员处理代码5: 在焊接过程中出现故障解释: *由于一个错误功能使焊接过程没有按照程序进行到底原因: *送料器或者电源有问题措施: *故障复位*检查焊接(重复焊接)*专业人员处理第1页共8页代码6: 缺少程序解释: *螺柱焊机不识别程序号码原因: *程序号码是0*没有设置接受信号*数据线中断措施: *检查程序是否编制*检查信号控制端口*专业人员处理代码7: 程序没有激活解释: *由于被选择的焊接程序没有被激活,因此无法实施焊接原因: * 编制程序错误*用户控制端错误*数据线损坏措施: *检查焊接程序并激活,或者选择一个已经被激活的程序 *专业人员处理代码8-12:参数超差解释: *一个错误的焊接参数超出了设定的最大值原因: *程序里的公差范围设定的太小*焊接回路中的电阻太高*电源或者是焊接工具损坏(焊枪,焊头)措施: *将干扰复位*检查公差*检查焊接回路和焊接条件*检查电源和焊接工具代码13: *没有拉弧解释: *焊机通过它的测量线不能确定拉弧过程原因: *拉弧动作没有按照规律被实施*焊接条件阻碍了拉弧第2页共8页*管线总成损坏*自动焊头损坏*送料器损坏*设备内部运行过程被干扰措施: *检查焊接条件*检查焊头*检查送料器*送一次钉*检查和送料器的连线*重复一次焊接*启动焊接完成信号*专业人员处理(如果设备确定没有拉弧,在拉弧电流电压一项中显示 U=99V)代码14:短路焊接解释: *在主电流阶段(无拉弧例外)发生短路焊接原因: *焊接间隙过小*焊接参数过强措施: *焊接完成信号复位*重复一次焊接*送一次钉*检查焊接程序*检查焊头的拉弧*专业人员处理代码15:下落时间超时解释: *下落时间超出最大的允许值,焊接被中断原因: *间隙调整错误*焊接回路中的电阻值过高*没有连接地线测量线第3页共8页*自动焊头或者焊枪损坏措施: *将干扰复位*检查测量线(将焊接回路中的电阻值降低)*检查焊头或焊枪的状态*专业人员处理代码16:空载焊接解释: *在焊接过程中拉弧被断开,或者焊接电流I小于80A 原因: *间隙过大*焊枪在开始焊接时被提起*零件表面油污太多*电源故障措施: *重复一次焊接*送一次钉*检查手枪的调整*检查焊接条件*检查零件表面的装态*专业人员处理代码17: 测量线中断解释: *测量线信号没有被捕捉到原因: *测量线中断或者连接错误*地线测量线和测量线被错接*和工件的接触电压中断*焊接电缆中断措施: *检查面板上的保险丝*按故障复位键*检查焊接线*检查测量线*检查地线测量线*专业人员处理第4页共8页(如果极性接反了,也捕捉不到测量线信号)代码19: 夹套的寿命超时解释: *夹套被用坏应该更换原因: *夹套使用次数的设定值被达到措施: *换新的夹套*故障复位*重新设定保养次数代码23: 手动焊接启动条件解释: *在用手焊枪焊接时没有遵守正确的焊接顺序原因: *角度开关调整错误*启动开关被桥接*正确的顺序是:BAW(接触信号)-WS(角度开关)- START (焊接),应该按照如此顺序焊接措施: *按照正确的顺序焊接*检查角度开关的调整情况*松开焊接开关并重新启动*专业人员处理代码32: 电源超出调整范围解释: *达不到程序设定的焊接电流原因: *外部回路电阻太高*电源故障措施: *检查外部回路*扩大外部回路中的电缆截面*检查电源*专业人员处理代码34: 安全回路解释: *在非焊接状态下外部回路存在着高压原因: *陌生电压*电源损坏第5页共8页措施: *检查外部的陌生电压*检查电源*专业人员处理警告:出现此代码时可能有危险的电压,必须由电器专业人员打开设备门进行检修代码38: LWL-数据连接,送料器解释: *中央CPU电路板和送料器之间的连接中断原因: *连线中断*硬件错误措施: *检查连到送料器上的连线*专业人员处理代码40: LWL-数据连接,电源解释: *ZCPU电路板不能和电源建立连接原因: *连线中断*硬件错误措施: *专业人员处理代码 45: 焊接启动信号没有复位解释: *存在的焊接信号无效原因: *打开设备电源时存在焊接信号*一次急停后存在焊接信号措施: *收回焊接信号*故障复位代码46: 没有送钉解释: *一个焊接信号被返回后,没有相应的一个焊钉送出原因: *最后一次焊接后没有焊钉送出措施: *重复送钉*故障复位代码49: 送料器没有在自动状态解释: *送料器上的钥匙开关没有在自动位置第6页共8页措施: *将要时开关拧到自动位置代码62: ZCPU:存储器模块缺,或者损坏解释: *电路板ZCPU不识别一个损坏或无接触的存储器原因: *存储器没插上或者损坏措施: *插好存储器或者更换*检查ZCPU板*专业人员处理代码100: 送料器: 电压缺少解释: *螺钉送料器无电压供给原因: *送料器里的保险丝坏了*送料器坏了措施: *更换送料器里的保险丝*检查送料器*专业人员处理代码102: 送料器: 螺钉传送错误解释; *在螺钉传送过程中出现故障原因: *螺钉在滑道上卡住了*滑道上有机械故障*最大或最小感应开关坏了*滚筒里空了*送料器坏了措施: *检查送料器或加满螺钉*排除机械故障*专业人员处理代码103: 送料器: 气压过低解释: *送料器入口气压太小原因: *供给送料器的气压太低或没有*送料器里的PE-转换器坏了第7页共8页措施: *检查压缩空气*检查转换器*专业人员处理代码104: 送料器: 分离刀没有前置解释: *送料器显示分离刀故障原因: *螺钉在分离刀和滑道之间卡住了*控制分离刀起始位置的感应开关坏了措施: *排除机械故障*检查控制开关*专业人员处理代码106: 送料器: 送料管锁紧解释: *送料管锁紧信号开关没有被盖上原因: *送料管没有连接措施: *连接好送料管*检查锁紧开关*检查管线总成*检查送料器*专业人员处理代码109: 送料器: 送料循环超时解释: *设备显示一个没有按程序的送料循环原因: *送料器没有把送料循环锁定在最大的监控时间内措施: *检查送料器*专业人员处理第8页共8页。
CP45错误信息中英文对照表
$2,002 $2,101 $2,102 $2,201 $2,202 $2,210 $2,211 $2,212 $2,301 $2,302 $2,400 $3,000 $3,001 $3,002 $3,003 $3,004 $3,010 $3,021 $3,022 $3,023 $3,031 $3,032 $3,033 $3,034 $3,035 $3,101 $3,102 $3,103 $3,104 $3,201 $3,202 $3,203 $3,301 $3,302 $3,401 $3,402 $3,501 $3,502 $3,600 $3,601 $3,700
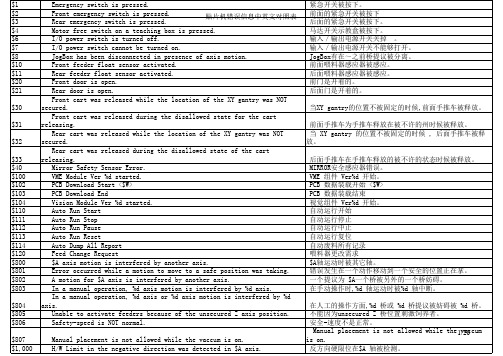
Manual placement is not allowed while the vaccum is on.
反方向硬限位在$A 轴被检测。 正方向硬限位在$A 轴被检测。 警报发生在 $A轴。 那$A一个桥无法在被叙述的时间期间内停止。 一个错误被发现在那 $一个桥。 1/18 编码器错误在运送装置- 宽度调整桥中发现。 BUT上升失败
2/18
$3,701 $3fff $4,000 $4,001 $4,002 $4,004 $4,005 $4,110 $4,111 $4,112 $4,113 $4,115 $4,116 $4,117 $4,200 $4,201 $4,202 $4,300 $4,301 $4,400 $4,401 $5,000 $5,001 $5,002 $5,003 $5,011 $5,012 $5,021 $5,022 $5,023 $5,024 $5,100 $5,101 $5,200 $5,201 $5,300 $5,301 $5,302 $5,303 $5,304 $5,307
DEH操作员站报警英汉对照表
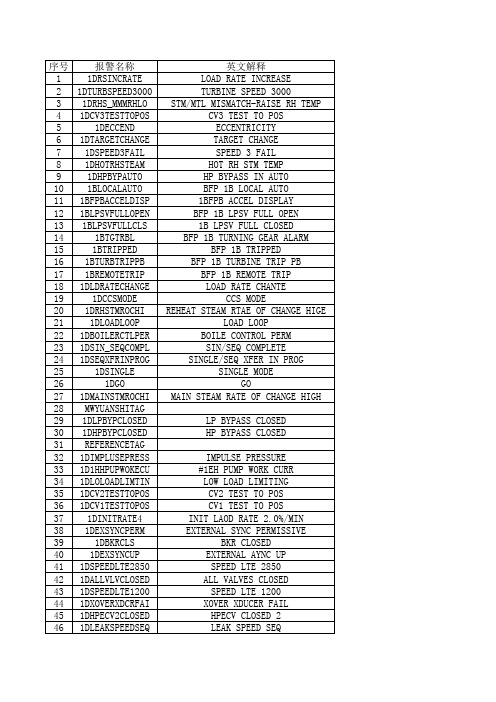
1ATURBTRIPPB 1AREMOTETRIP 1ATGTRBL 1DENTHALPY 1DLPBYPAUTO 1DSHAFTVIB4Y 1DSHAFTVIB5Y 1DSHAFTVIB5X 1DSHAFTVIB4X 1BREMFWREJT 1BSYSSPEEDFAIL 1DRCHESTDTHI 1DRCHESTDT 1DMANREFCHANGE 1CHSTOUMTLTMPR 1DSPEED1FAIL 1DCCSDEMAND 1DLPOILPRESS 1DBRG4ATEMP 1DBRG1BTEMP 1DBRG4BTEM 1DIPHITEMP 1DIPLOTEMP 1DHPHITEMP 1DHPLOTEMP 1DEH1PMPCUR 1DEH2PMPCUR 1DRSINVALID 1DHIPSTART 1DINSYNCPERM 1DSPYTESTKS 1DMS2CALCOMPLE 1DRFVCLOSED 1DTGON 1EH2PUMPRMT 1DEH1PUMPRMT 1DHPPREWCOMPLT 1DENTHALPY 1DRCHESTDT 1DTURBOSPTR 1DCALOSPTR 1BHPSVFULLCLS 1DSPDFAILTRIPT 1DATCTRIPTR 1DCONDVACUUM 1DLUBEOILTEMP 1DVVCLOSED
英文解释 LOAD RATE INCREASE TURBINE SPEED 3000 STM/MTL MISMATCH-RAISE RH TEMP CV3 TEST TO POS ECCENTRICITY TARGET CHANGE SPEED 3 FAIL HOT RH STM TEMP HP BYPASS IN AUTO BFP 1B LOCAL AUTO 1BFPB ACCEL DISPLAY BFP 1B LPSV FULL OPEN 1B LPSV FULL CLOSED BFP 1B TURNING GEAR ALARM BFP 1B TRIPPED BFP 1B TURBINE TRIP PB BFP 1B REMOTE TRIP LOAD RATE CHANTE CCS MODE REHEAT STEAM RTAE OF CHANGE HIGE LOAD LOOP BOILE CONTROL PERM SIN/SEQ COMPLETE SINGLE/SEQ XFER IN PROG SINGLE MODE GO MAIN STEAM RATE OF CHANGE HIGH LP BYPASS CLOSED HP BYPASS CLOSED IMPULSE PRESSURE #1EH PUMP WORK CURR LOW LOAD LIMITING CV2 TEST TO POS CV1 TEST TO POS INIT LAOD RATE 2.0%/MIN EXTERNAL SYNC PERMISSIVE BKR CLOSED EXTERNAL AYNC UP SPEED LTE 2850 ALL VALVES CLOSED SPEED LTE 1200 XOVER XDUCER FAIL HPECV CLOSED 2 LEAK SPEED SEQ
报警信息中英文对照
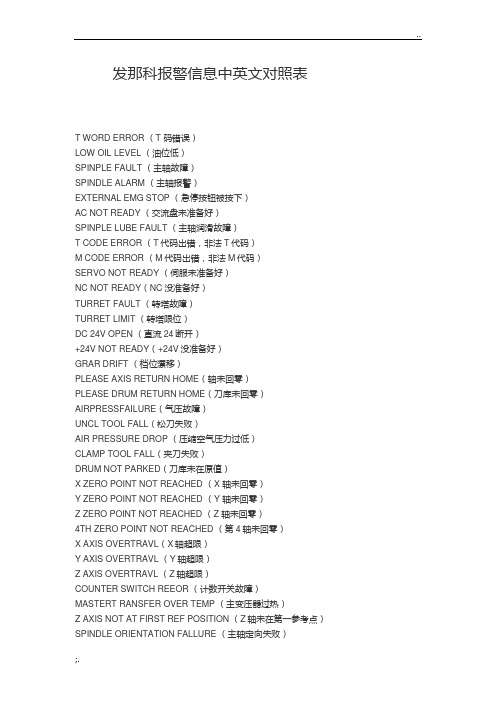
发那科报警信息中英文对照表T WORD ERROR (T 码错误)LOW OIL LEVEL (油位低)SPINPLE FAULT (主轴故障)SPINDLE ALARM (主轴报警)EXTERNAL EMG STOP (急停按钮被按下)AC NOT READY (交流盘未准备好)SPINPLE LUBE FAULT (主轴润滑故障)T CODE ERROR (T代码出错,非法T代码)M CODE ERROR (M代码出错,非法M代码)SERVO NOT READY (伺服未准备好)NC NOT READY(NC没准备好)TURRET FAULT (转塔故障)TURRET LIMIT (转塔限位)DC 24V OPEN (直流24断开)+24V NOT READY(+24V没准备好)GRAR DRIFT (档位漂移)PLEASE AXIS RETURN HOME(轴未回零)PLEASE DRUM RETURN HOME(刀库未回零)AIRPRESSFAILURE(气压故障)UNCL TOOL FALL(松刀失败)AIR PRESSURE DROP (压缩空气压力过低)CLAMP TOOL FALL(夹刀失败)DRUM NOT PARKED(刀库未在原值)X ZERO POINT NOT REACHED (X 轴未回零)Y ZERO POINT NOT REACHED (Y 轴未回零)Z ZERO POINT NOT REACHED (Z 轴未回零)4TH ZERO POINT NOT REACHED (第4轴未回零)X AXIS OVERTRAVL(X轴超限)Y AXIS OVERTRAVL (Y轴超限)Z AXIS OVERTRAVL (Z轴超限)COUNTER SWITCH REEOR (计数开关故障)MASTERT RANSFER OVER TEMP (主变压器过热)Z AXIS NOT AT FIRST REF POSITION (Z轴未在第一参考点)SPINDLE ORIENTATION FALLURE (主轴定向失败)TOOL DESENT OR TOOL DATA REEOR (刀具数据错误)PLEASE UNLOAD THE TOOL ON SPRINELK (请卸下主轴上的刀)PLEASE LOAD TOOL ON APINDLE (请装上主轴上的刀)A AXIS UNCLAMP FAIL (A 轴松开失败)A AXIS CLAMP FAIL (A 轴夹紧失败)DRUM OUT TO APRONDLEIS FALL (刀库摆向换刀位失败)MG SWING OVERLOAD(刀库摆动过载)DRUM BACK PARK IS FALL (刀库摆回原始位失败)TURRENT MOTOR1 OVERLOAD (刀库移动电机过载)COOLANT MOTOR OVERLOAD (冷却泵过载)DRUM ATC FAULT (自动换刀失败)TOOLS UNLOCKED (刀具未锁紧)BATTERY ALARM (电池报警)DRUM POSITION SWITCH ERROR (刀库位置检测开关故障)DRUM NOW NOT AT PARK (刀库未在原始位置)IT DANGOU TO MOVE DRUM (刀库禁动)POT UO FAILOR POT NOT AT UP POSITION (刀套未在水平位)POT DOWN FAIL (刀套翻下动作失败)IT IS DANGOUR TO MOVE ARM (机械手禁动)THE SPINDLE STATU IS ERROR (主轴状态错误)ARM MOTOR OR ARM SWITCH FALL (机械手或机械手开关故障)CENTRE LUBRICATION FALL (中心润滑故障)THE WORK NOT CLAMPED (工件未夹紧)AUTO TOOL CHANGE FAULT (自动换刀失败)TOOL DATA OUT OF RANGE (指令刀具号超出范围)THE ORDER TOOL NOW IN SPINDLE (目标刀具在主轴上)THE THREE SPINDLE SWITCH FAULT (主轴上的接近开关)THE CENTRE COOLANT IS LOWER (刀具内冷泵液位过低)DRUM RETURN 1# POSITION FAULT (刀库自动回零失败)SPINDLE OVERLOAD (主轴过载)TURRENT MOTOR OVERLOAD (刀盘转动电机过载)CHIP CONVEYER OVERLOAD (拉屑器过载)HARD LIMIT OR SERVO ALARM (硬限位或伺服报警)NO LUB OIL (无润滑油)INDEX HEAD UNLOCKED (分度头未锁紧)MT NOT READY(机床没准备好)MG OVERLOAD (刀库过载)LUB EMPTY(润滑无油)AIR PRESSURE(气压不足)COOLANT NOT READY(冷却没准备好)LUBE EMPTY(油雾油位低,润滑油位低)LUB PRESSURE LOW(润滑压力低)CONVEY VERLOAD(排屑过载)LUB OVERLOAD(润滑过载)LUBE PRESSURE LOW(油雾压力低)SERIAL SPINDLE ALARM (串行主轴报警)NC BATTERY LOW ALARM(NC电池低报警)MAGAZINE MOVE LIMIT SWITCH ERROR(刀库移动限位开关故障)SPINDLE TOOL UNLAMP POSITION LIMIT SWITCH ERROR(主轴刀具UNLAMP位置限位开关故障)MAGAZINE NOT IN POSITION OR SENSOR ERROR(刀库不在位或传感器错误)AIR PRESSURE LOW ALARM(气压低报警)MOTOR OVERLOAD(电机过载)T CODE > MAGAZINE TOOLST CODE < 1 ERROR5TH AXIS HARDWARE OVERTRAVER LIMIT ERRORDOOR IS OPENED(开门)LUB PRESSURE SWITCH ERROR(油压开关错误)SPINDLE OIL COOLANT UNIT ERRORSPINDLE LOAD ABNORMAL(主轴负荷异常)TRANSDUCER ALARM(传感器报警)BED-HEAD LUBRICATE OFF(床头润滑关闭)EMG OFFHYDRAULIC CHUCK PRESS LOW(液压夹头压力低)HYDRAULIC TAIL PRESS LOW(液压尾座压力低)LUB 0IL LOW(油压低)TURRET CODE ERROR(转塔码错误)TURRET RUN OVERTIME(转塔运行超时)MANUAL HANDLE INTERRUPTTRY TO RUN SPINDLE WHILE CHUCK NOT LOCKTRY TO RUN SPINDLE WHILE TAIL NOT LOCKSPINDLE NEUTRAL GEARMAGAZINE ADJUSTHYDRAULIC NOT RUNSAFETY DOOR BE OPENEDSAFETY DOOR NOT CLOSENOT ALL AXIS HAVE GONE BACK REFIN ADJUST,IGNORE GOING BACK REFAFTER EXCHANGE TOOL,CYCLE STARTATC MOTOR QF16 OFFX AXIS IS LOCKED(X 轴被锁定)Y AXIS IS LOCKED(Y 轴被锁定)Z AXIS IS LOCKED(Z 轴被锁定)A AXIS IS LOCKED(A 轴被锁定)SPINDLE MOTOR FAN QF26 OFF(主轴电机风扇QF26关闭) SPINDLE ORIENTATION INCOMPLETE(主轴定位不完全)M FUNCTION NOT COMPLETE(M 功能无法完成)SPINDLE NOT IN GEAR POSITION(齿轮不在主轴位置)SPINDLE NOT CHANGED TO LOW GEAR(主轴没有变为低档)SPINDLE NOT CHANGED TO HIGH GRAR(主轴没有变为高档)MAG NOT BACKWARDSPINDLE TOOL NOT CLAMPSPINDLE TOOL NOT UNCLAMPMAG NOT IN POSITIONMAG DOES NOT ROTATEMAG DOES NOT STOP RUNNINGA AXIS HAVE NOT CLAMPEDA AXIS HAVE NOT UNCLAMPEDSET D499=1,"MAG.JOG" SWITCH ONHYDRAULIC MOTOR QF7 OFF(液压马达QF7关闭)HYDRAULIC TEMPRETURE HIGH(液压使用温度高)HYDRAULIC FILTER BLOCKED(液压过滤器阻止)HYDRAULIC OIL LEVEL LOW(液压油位低)HYDRAULIC FAN QF8 OFF(液压风扇QF8关闭)HELIX CONYER QF9 OR QF10 OFFCHAIN CONYER QF11 OFFCOOLANT MOTOR QF12 OFF(冷却液电机QF12关闭)COOLNT LEVEL LOW,CYCLE STOP AFTER 20 MINUTESINNER COOLANT BLOCK(内冷却堵塞)SPINDLE COOLANT MOTOR QF14 OFF(主轴冷却液电机QF14关闭)INNER COOLANT QF13 OFF(内冷却液QF13关闭)MAG MOTOR QF15 OFFCABINET COOLANT EQUIP QF20 OFFOIL GATHER QF24 OFFAIR PRESSURE LOW(低气压)SPINDLE COOLANT MOTOR FAULT(主轴冷却液电机故障)LUB.OIL IS LOW(润滑油低)DOOR OPEN(门打开)FRONT DOOR(R) OPEN(前门打开)LEFT DOOR OPEN(左门打开)LUBRICATION OIL QF23 OFF(润滑油QF23关闭)LUBRICATION PRESS LOW(润滑油位低)IN ADJUST,MAG CAN'T EXCHANGE T(在调整,刀库不能交换T)NOT ALL DOOR CLOSED(门没有全部关闭)IN M06,MAG NOT READY(在M06,刀库未准备好)MAGAZINE NOT READY(刀库未准备好)POCKET NOT HORIZANTALIN M06,Z NOT BACK TO 2ND REFIN M06,Z AXIS NOT IN PSW1ATC NOT IN ZERO POSITIONSPINDLE ORIENTATION UNCOMPLETEPOCKET NOT HOR./MAG NOT BCKWRDPOCKET NOT VER./MAG NOT FORWRDUNCLAMP TOOL HAS NOT COMPLETEDCLAMP TOOL HAS NOT COMPLETEDAIM TOOL NO. IS WRONGMAG NOT BACKWARDAFTER RETRACT,SET R.T.BACK OFFZ NOT IN PSW2,FORBID ATC RUNNINGD499 EQUAL 1MAG.JOG SOFT SWITCH IS ONZ NOT IN PSW2,FORBID MAG FORWARDCHEKE SPINDLE MODULE ALARMOIL WATER SEPARATOR QF24 OFFSET THE SOFT SWITCH MAG.JOG OFFSET D499 TO 0 设定D499为0K PARAM ABOUT MAG SET IS WRONG 关于MAG的K参数设定错误MECHANICAL BRAKE NOT RELEASED机床抱闸没有松开MECHANICAL BRAKE IS WRONG 机床抱闸错误PLEASE ADD LUB.OIL 请加润滑油PROBE BATTERY VOLTAGE IS LOW 探头电池电压低PROBE IS ERR 探头错误PARAMETER WRITE ENABLE(参数写使能)PMC EDIT ENABLE(PMC编辑使能)CHECK LUB ROUTINSPINDLE GEAR SIGNAL MISS 主轴档位信号消失T_CLAMPED_SIGNAL MISS T夹紧信号消失SP OVERRIDE SWITCH DISCONNECTION 主轴倍率开关断路FEED OVERRIDE SWITCH DISCONNECTION 进给倍率开关断路THE TOTAL NUMBER OF POCKETS SET ERRCHANGE T STOPED BECAUSE NO AIR 因为缺少压空交换停止THE COOLANT WATER TOO LOW,ADD COOLANT WATER AT ONCE 冷却水少立即加水COOLANT LEVEL LOW,ADD COOLANT WATER 冷却水液位低PLEASE REPLACE CNC BATTERY QUICKLY 请立即更换CNC电池。
(完整版)VDR船舶黑匣子

船载航行数据记录仪(VDR)介绍船载航行数据记录仪(VOYAGE DATA RECORDER缩写VDR)是一种船舶安全监控产品,主要用于实时采集、记录船舶航行过程中各种静态、动态航行数据,并将最新一段时期的数据保存于最终存储器,该存储器在船舶失事后有较大的生存可能性,以便打捞出来后,在特定的VDR数据再现设备真实再现船舶发生重大海难或受损前后一段时间内船舶航行状态、驾控人员操作处理情况以作为事故调查,判断事故发生原因的重要依据和处理海事纠纷的重要证据。
其功能相当于飞机上的黑匣子,因而也有人将VDR 称为“船用黑匣子”。
它与飞机黑匣子、汽车黑匣子等同属于电子信息类的安全事件取证和证据保全类产品。
2000年12月国际海事组织(IMO)通过A.861(20)号决议案,要求国际航行及沿海航行船舶均应安装船载航行数据记录仪(VDR)。
国际海事组织第20次大会(1997年11月27日)通过了《船载航行资料记录仪(VDR)性能标准》A.861(20)号决议。
《船载航行资料记录仪(VDR)性能标准》的附件《船载航行资料记录仪(VDR)性能标准建议案》是建议船用黑匣子的最低标准,主要内容有:1. 船用黑匣子是一个完整的系统,包括资料处理,编码,资料介面,记录介质,电源供应和专用备用电源(可充电式VDR辅助电池)和相关项目。
2. 应能连续记录在事故发生期间的有关活动,当船电中断时船舶的应急电源应能供电,当应急电源中断时专用备用电源应供电2 小时。
3. 能记录日期,时间,船位,速度,艏向,驾驶室声音,通信声音,雷达资料和显示后的选择,测深仪,主报警,操舵命令和回应,轮机命令和回应,船体破口状况,水密和防火门状况,横摇和船体应力,风速和风向等。
4. 要求在正常工作状态下应是完全自动的。
能在事故后保存记录资料并恢复和再现这些资料。
与船舶任何设备的连接,都不应妨碍该设备的正常工作,即使船用黑匣子系统出现故障时。
国际海事组织对安装船用黑匣子的建议时间国际海事组织海上安全委员会第72次会议(2000年5月17-26日),决定同意对国际间航行的滚装船和客运船上安装VDR的最后期限;第73次会议(2000年11月27日-12月6日)对各种船舶安装船用黑匣子的建议时间期限为:2002年7月1日及以后建造的客轮;2002年7月1日及以前建造的滚装客船在不晚于2002年7月1日以后的首次检时;2002年7月1日及以后建造除滚装客船以外的客轮不晚于2004年1月1日;2002年7月1日及以后建造的,除旅客轮船以外3000总吨及以上轮船.Ships' “black boxes” and automatic identification systems – regulations enter into force on 1 July 2002New regulations for certain size ships to carry voyage data recorders (VDRs) and automatic identification systems (AISs) enter into force today (1 July 2002).The mandatory regulations are among a raft of amendments to the International Convention for the Safety of Life at Sea, 1974 (SOLAS) entering into force on 1 July 2002. In addition, under its second phase of implementation, the International Management Code for the Safe Operation of Ships and for Pollution Prevention (ISM Code) becomes mandatory for most ships trading internationally on 1 July 2002.The revised SOLAS chapter V (Safety of Navigation), which was adopted in December 2000, includes a number of important new requirements for ships, including those relating to carriage of VDRs and AIS and acceptance of electronic charts as meeting the chart carriage requirements.Voyage data recordersLike the black boxes carried on aircraft, VDRs enable accident investigators to review procedures and instructions in the moments before an incident and help to identify the cause of any accident. Performance standards for VDRs were adopted by IMO in 1997 (IMO resolution A.861(20)) and IMO encourages all ships to carry VDRs.In addition, IMO’s Maritime Safety Committee (MSC) in May 2002 approved MSC/Circ.1024 on Guidelines on Voyage Data Recorders (VDR) ownership to complement the VDR performance standards.VDR requirementsThe following ships are required to carry VDRs, under regulation 20 of the new SOLAS Chapter V:passenger ships constructed on or after 1 July 2002;ro-ro passenger ships constructed before 1 July 2002 not later than the first survey on or after 1 July 2002; passenger ships other than ro-ro passenger ships constructed before 1 July 2002 not later than 1 January 2004; and ships, other than passenger ships, of 3,000 gross tonnage and upwards constructed on or after 1 July 2002.VDRs are required to meet performance standards “not inferior to those adopted by the Organization”. Performance standards for VDRs were adopted in 1997 and give details on data to be recorded and VDR specifications. They state that the VDR should continuously maintain sequential records of preselected data items relating to status and output of the ship's equipment and command and control of the ship. The VDR should be installed in a protective capsule (太空舱) that is brightly coloured and fitted with an appropriate device to aid location. It should be entirely automatic in normal operation. Under the new regulation, the voyage data recorder system, including all sensors, shall be subjected to an annual performance test conducted by an approved testing or servicing facility to verify the accuracy, duration and recoverability of the recorded data.Administrations may exempt ships, other than ro-ro passenger ships, constructed before 1 July 2002, from being fitted with a VDR where it can be demonstrated that interfacing a VDR with the existing equipment on the ship is unreasonable and impracticable.VDRs for existing cargo shipsIn December 2000, IMO’s Maritime Safety Committee (MSC) adopted a resolution on the carriage of VDRs on existing cargo ships, which calls for a feasibility study (可行性研究)to be carried out to ascertain the need for mandatory carriage of VDRs on these ships. The feasibility study, being conducted by the Sub-Committee on Safety of Navigation (and other Sub-Committees as appropriate), takes into account such factors as practicability, technical problems relating to the retrofitting (花样翻新)of VDRs, adequacy of existing performance standards including the possible development of simplified standards, experience in the use of VDRs on ships already fitted with them, including data that could not have been obtained without VDRs, and relevant financial implications, including a cost-benefit analysis.The aim is to finalize the study by 1 January 2004 so that, if the study demonstrates a compelling (强制的)need for mandatory carriage of VDRs on existing cargo ships, relevant amendments to SOLAS Chapter V and the associated performance standards can be drafted. In the meantime, the resolution invites Governments toencourage shipowners to install VDRs on existing cargo ships voluntarily, so that wide experience of their use may be gained.IMO GUIDELINES ON VOYAGE DATA RECORDERS (VDR) OWNERSHIP AND RECOVERY1.) Ownership of VDR/data:The ship owner will, in all circumstances and at all times, own the VDR and its data. however, in the event of an accident the following guidelines would apply.2.) Recovery of VDR:Recovery of the VDR is conditional on the accessibility of the VDR or the data contained therein.a.) In the case of a non-catastrophic (灾难的)accident, recovery of the memory should bestraightforward. For example, in some VDRs it can be accomplished by removal of a hard discfrom the VDR unit. This action will have to be taken soon after the accident to best preserve therelevant evidence for use by both the investigator and the ship owner. As the investigator is veryunlikely to be in a position to instigate this action soon enough after the accident, the owner mustbe responsible, through its on-board standing orders, for ensuring the timely preservation of thisevidence in this circumstance.b.) In the case of abandonment of a vessel during an emergency, masters should, where time andother responsibilities permit, recover the memory and remove it to a place of safety and preserveit until it can be passed to the investigator.c.) In the case of a catastrophic accident, where the VDR is inaccessible and the data has notbeen retrieved prior to abandonment, a decision will need to be taken by the Flag State in co-operation with any other substantially (充分的)interested States on the viability (生存能力)and cost of recovering the VDR balanced against the potential use of the information. If it isdecided to recover the VDR the investigator should be responsible for co-ordinating its recovery.The possibility of the capsule having sustained damage must be considered and specialistexpertise will be required to ensure the best chance of recovering and preserving the evidence. Inaddition the assistance and co-operation of the owners, insurers and the manufacturers of theVDR and those of the protective capsule may be required.3.) Custody (保管)of VDR/data:In all circumstances, during the course of an investigation, the investigator should have custody of the original VDR data, perhaps in the form of the whole or part(s) of the VDR itself, in the same way as if he has custody of other records or evidence under the Code for the Investigation of Marine Casualties and Incidents.4.) Read-out of VDR/data:In all circumstances the responsibility to arrange down loading and read-out of the data from the recovered memory in whatever form should, in the first instance, be undertaken by the investigator who should keep the shipowner fully informed. Additionally, specially in the case of a catastrophic accident where the memory may have sustained damage, the assistance of specialist expertise may be required to ensure the best chance of success.5.) Access to the data:Although the investigator will have custody of the original VDR memory in whatever form for the duration of the investigation, a copy of the data must be provided to the ship owner at an early stage in all circumstances. Further access to the data will be governed by the applicable domestic legislation of the flag state, coastal state and the lead investigating state as appropriate and the guidelines given in the Code for the Investigation of Marine Casualties and Incidents.Data items to be recorded。
VDR
VDRVDR:Voyage Data Recorder,航行数据记录仪,也就是船舶的“黑匣子”。
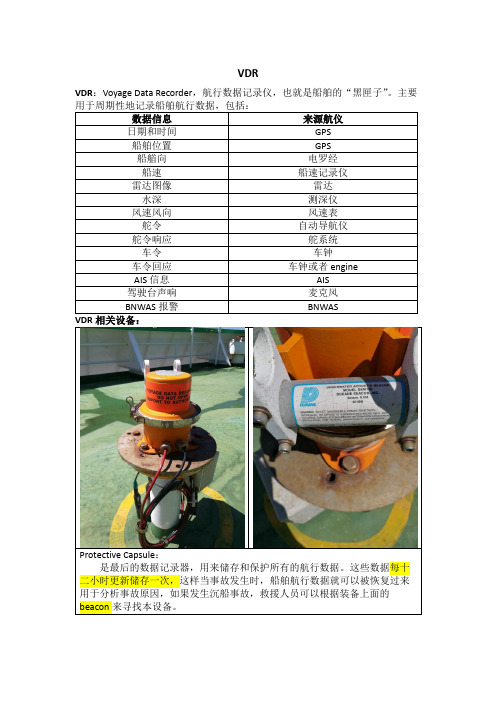
主要Protective Capsule:数字是0的话就是Serial Isolated Converter出了故障),模拟警报analog alarm(警报ID以U开头,如果最后一个数字是0,则表示应该是analog card 的问题),数字警报digital alarm(以D开头,意思是digitalinput/output card,以X开头,意思是digital inputcard;如果最后一个数字是0,就是digital card的问题了)(大多数情况下,VDR的alarm都类似于误报警,可能是温度太高船舶摇等原因,在ACKALARM后,alarm自己就会恢复)VIDEO:点击video,即可查看当前雷达图像,点击zoom in/out,还可以调节图像大小。
由于本船VDR 只连接了2号X-band雷达,所以只能看到2号雷达的图像。
SHIP INFO:点击,就可以查看船舶基础信息,包括船级社,时间日期,位置,船速,船艏向,水深,风和舵。
FUNCTION:有两个选项,service mode和data backup。
Data backup里包括Long-term data backup和Manual data backup。
Long-term data backup是长期储存,就在系统里,可以存储duoda30天的内容,如果储存的内容超过存储容量,系统会自动覆盖更新。
Manual data back ,可以将系统内储存的内容复制出来,还可以自己选择要备份到的地方,备份数据的类型和时间间隔1.将准备好的外置储存设备通过USB与VDR连接2.在VDR屏幕上点击FUNCTION3.选择MANUAL DATA BACK,然后点击NEST4.点击BROWSE5.选择好DATA TYPE和PERIOD6.最后OK就行了VDR start up步骤:1.turn on the“MAIN”和“BATTERY”2.按顺序依次turn on the“I/O”,“SVIU”,“SIC16”,“SAIU”,“CAPSULE”,“ROMU”一般情况下通常power on5分钟后才会start upI/OCAPSULE ROMU SAIU SIC16 SVIUShut down步骤:1.按住“OFF”五秒。
(完整版)船舶PSC检查缺陷代码【中英文对照】
(完整版)船舶PSC检查缺陷代码【中英文对照】Code Actions to be Taken需采取的措施00 No Action Taken 无不需采取措施10 Deficiency Rectified 缺陷已纠正12 All Deficiencies Rectified 所有缺陷已纠正15 Rectify Deficiencies At Next Port 在下一港口纠正缺陷16 Rectify Deficiencies Within 14 Days 在14天内纠正缺陷17 Master Instructed to Rectify Deficiencies Before Departure要求船长在离港前纠正缺陷18 Rectify Deficiencies Within 3 Months 在三个月内纠正缺陷19 Entrance Prohibition for ship without Certification 未经认证的船舶禁止靠港20 Ship Delayed to Rectify Deficiencies 船舶延期离港以纠正缺陷25 After Delay Allowed to Sail (*Specify Date) 延期后允许开航(注明日期)30 Ship Detained 滞留船舶35 Detention Rised (*Specify Date) 解除滞留(注明日期)36 Ship allowed to sail after follow-up detention 船舶再次滞留后允许开航40 Next Port Informed 通知下一港口50 Flag State /Consul Informed 通知船旗国/领事馆55 Flag State Consulted 咨询船旗国60 Region State Informed 通知本区域成员国70 Classification Society Informed 通知船级社80 Temporary Substitution of Equipment 临时更换设备82 Alternative equipment or method used 使用替代设备或方法85 Investigation of Contravention of Discharge Provision (MARPOL)违反(MARPOL)排放规定的调查90 Letter of warning issued 签发警告信95 Re-inspection Connection with Code 90 根据签发的警告信重新检查96 Letter of Warning Withdrawn 收回警告信97 Destination Unknown Information 目的港信息未知99 Other (Specify) 其他(具体说明)。
BV船级社报警点

监测
指示 机旁 机旁 机旁
减速
表9 主辅燃气轮机 符号含义: H=高,HH=过高,G=组合报警, L=低,LL=过低,I=独立报警, ×=要求该功能,R=遥控 系统参数识别 ·CONTROL SYSTEM FAILURE 控制系统故障 ·AUTO. START FAILURE 自动启动故障 燃气轮机机械监测 机旁 ·SPEED 转速 报警 ×
就地
L
就地 就地
就地 就地
SCAV. AIR TANK TEMP. 扫气箱温度(箱内火焰探测) EXH.GAS TEMP. 排气温度 D/E SPEED/DIRECTION 柴油机转速/转向(对可逆转) Electron speed regulator system failure 电子调速故障
就地 就地(4) 就地 H ×
监测
显示
减速
ቤተ መጻሕፍቲ ባይዱ
L L+H 机旁 机旁
× × H
机旁
机旁
H × L+H
机旁
机旁(1)
·BOILER DRUM TUBE LEVEL 每一锅炉鼓筒内水位
LL
(1)需要两个液位指示仪
表4 辅助锅炉
符号含义: H=高,HH=过高,G=组合报警, L=低,LL=过低,I=独立报警, ×=要求该功能,R=遥控 系统参数识别 LEVEL 水位 CIRCULATING STOP 循环停止(对强制循环锅炉) F.O. TEMP. OR VISCOSITY 燃油温度或粘度(2) FIRE OFF 熄火 BOILER INNER TEMP. 锅炉箱内温度(火) STEAM PRESS. 蒸气压力 (1)当自动控制不能覆盖所有的从零负荷到完整的负荷范围时 (2)使用重油时 报警 L+H LL × L+H × H H(1)
航海仪器第27讲 VDR原理及操作

存储
用于人工启动设备自检程序, 并将测试结果显示在报警指示 器上或发出相关的提示,以配 合对设备的查验。
测试
发生海上事故时数据备份操作
一般事故
按存储键,确认数据已经有效存储到存储单元 后,取出移动存储卡。
重大事故
无再继续记录航行数据的必要时,按记录终 止键,再按照(1)的操作完成数据备份,然后关 闭系统电源。
谢谢观看
失事的船舶中分析失事前后的各种 状
态和数据,找出失事的真正原因。
2 根据VDR记录的数据,及时发现
船舶的安全 隐患。Leabharlann 船载航行数据记录仪系统组成
传感器
报警 指示器
数据 回放设备
主机
数据存储器
电源
主机
主处理机
主 机
数据编码处理器
存储单元
存储
数据处理
传感器数据在数据处理器数据存储和控制程序的 控制下,完成数据格式转换、数据刷新和数据备 份等,实现数据管理任务。
VDR原理及操作
课程导入
VDR全称是航行记录仪
英文全称
Voyage Date Recorder
概述
船载航 行数据记录仪(VDR)
“海上黑匣子”
专门用于 记录船舶航行数据的仪器,能记录并保留船舶发生事故前后 一段时间的船舶动态、 物理状况、命令和操纵的信息。
VDR在航海方面的作用
1
v
主管机关通过VDR进 行海难调查,从
操作控钮基本功能
VDR的电源开关一般设在主机不易
电源 被触碰或被锁定的位置,启动时应
注意顺序接通船舶主电源、应急电 源和专用电池电源。
1
2
报警 确认
3
当设备发生报警时,按下报 警确认按键,声音报警静音, 但视觉报警须在报警条件解 除之后消失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Error --4 --3 --2 --1 --HDD
Error Name
Description Normal operation. "--X" (X:1,2,3,4) means number of exting recording area in the HDD. "---" is shown at startup or when recognizing HDD.
BACKUP_HDD_MISSIN Backup HDD not connected to VDR, 1) SAVE button pressed and backup G or no memory area. HDD removed: Replace backup HDD 2) Other situations: Reset VDR. If normal operation not restored, request service. Backup HDD No Connection DRU No Connection This indicates that the BACKUP has Connect BACKUP HDD or been disconnected more than 90 investigate LOG and repair/replace. seconds. DRU has been discontinued more than 90 seconds. This indicates that the time difference between system time and time supplied by UTC source is more than specified time. Connect DRU again or investigate LOG and repair or replace. Restart VR-3000/S. Try to see if the CMOS clock is set correctly. If not, set it and restart VR-3000/S. If yes, find out why the time source device GPS is delivering "out of bands" time info. If radar is turned OFF, press ACK on the RAP to silence alarm. Turn on radar. If no error appears, the system is normal. If the error appears, check cable connections or setting. Check cable connected to RAP. Reconnect RAP. Check connection to alarm panel. Check cable and IP-address setting. Check connection to Backup HDD. If not still storing, request service. Check connection to DRU. If not still restarting recording, request service.
Radar interface board is available but Request service. it is not recognized. Audible interface board is available but it is not recognized. Request service.
412
413
Serial Board Fail
Serial interface board is available but Request service. it is not recognized. Poor connection between JB(No.28)and DCU. Check cable and IP-address setting.
170
VDR Configuration Fail
Data can not be stored because VDR Restore VDR settings data. If not, setting data is corrupted. request service.
1/2
Error 171
Error Name VDR Recording Buffer Overflow DRU Memory Shortage
Description Action Radar video inputs over the capacity Check or reduce the radar channels of the recording buffer memory. or video resolusion. It looks that data cannot be recorded Modify radar recording setting. Max. more than 12 hours. recordable channel: two channels. Both AC and DC power are down and Reconnect AC and/or DC power. switching to battery drive. Audible alarms are generated for max. two min. This ALARM is issued when the Check MIC TEST in the VDR microphone test fails. This test can Maintenance Viewer. If this is OK, be run from Audio tab in the VDR locate the faulty microphone and Maintenance Viewer, and is run every check/replace it. 12-hours during normal operation. This indicates that no. of FLASH Check if no. of FLASH devices and devices found in DRU and defined in configuration setting are same. CONFIGURATION is not same. System does not receive UTC information. Cable connection inside DCU is faulty. System failed by the self test. Data is not delivered from a serial ohannel within an assigned time. Battery voltage is not coming or it is low. Terminal board is abnormal. Check that a valid UTC source is connected to the serial port defined as UTC source. Check cable between PDU and CPU block in DCU. Request service. Reconnect serial data. Check failed device. Confirm that the battery switch is turned on. If ok, battery is required to replace a new one. Confirm cable connection between terminal board and audible interface board. It is required replacement of battery. Restart VR-3000/S Restart VR-3000/S
VR-3000/VR-3000S Error Codes
Error codes appear on the status display on the Power Control Panel in the Data Collecting Unit and the Remote Alarm Panel to alert to possible trouble. Below is a list of the error codes.
186
2பைடு நூலகம்4
Battery Running
218
MIC Test Fail
226
DRU Flash Device No match GPS No Connection
234
246
PDU No Connection
254 Self Test Fail 3xx Serial No Connection (301-372) 401 Battery No Connection or Battery Voltage Low Terminal Board No Connection Battery Voltage Low DRU Exchanged
082 084 088 094 098
RAP No Connection AP No Connection JB No Connection
Indicates that Junction Box (No.1) is missing. Backup HDD Recording Indicates that Backup is inactive-not Fail storing data. DRU Recording Fail Indicates that DRU is inactive-not storing data.