六轴关节机器人机械结构
工业6轴机器人的主要技术参数
工业6轴机器人的主要技术参数 x
工业六轴机器人技术参数
一、基本性能参数
1.机械结构
基座:铸铁结构
臂节:铝合金结构
轴系:钢制滚动轴承结构
2.动作幅度
有效工作范围: 1500mm
肩关节范围: -90°~90°
肘关节范围: -90°~90°
腰关节范围: -90°~90°
腿关节范围: -90°~90°
脚关节范围: -90°~90°
3.噪音
工作噪音等级:≤ 75dB(A)
4.容积
机身高度:1450mm
机身宽度:1700mm
机身长度:2050mm
5.负载能力
负载范围: 0~5kg
6.运行速度
静态旋转速度: 50°/s
动态旋转速度: 100°/s
7.安全防护
机器人工作区域有安全检测装置及警告系统
二、控制系统
1.控制器
采用英文用户界面,数字I/O接口,Ethercat通讯接口,可实现运动控制和状态监测。
2.控制软件
软件采用英文,兼容Windows XP/7/8/10系统,支持IEC 61131-3标准,可使用上位机对机器人进行参数调节、运动控制等。
3.安全系统
支持机器人运动时自动检测,有故障自动停机,有故障自动报警等功能。
最新六轴关节机器人机械结构(精品收藏)
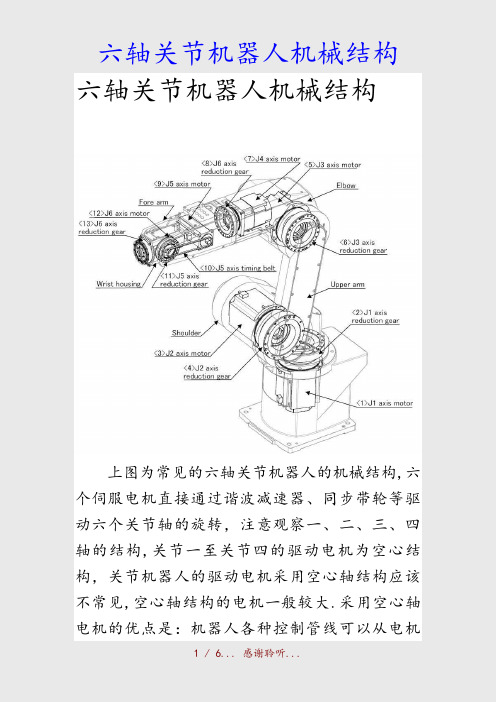
六轴关节机器人机械结构上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大.采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。
对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题.ﻫ机器人的腕部结构常见有如下几种结构:ﻫ在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等。
ﻫ关节设计:ﻫ对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经有好几十年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对来说比较成熟,他们在相互竞争中可以相互模仿、改善、不断推陈出新,他们的技术对于国内来说,近乎完美。
而国内目前这个行业还处在黎明前的黑暗阶段,虽然有不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试验成功,真正产业化、商品化还有一段相当漫长的路要走.而更多的公司还停留在项目立项、技术评估、投入风险分析的阶段.由于国内做这个行业的很少,相关的结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别人的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会^_^),还好了,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们做机械设计的(我应该也算是个机械工程师啊^_^毕竟我也是做机械的)少走点弯路,做出更好的机器.ﻫ六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动.小型的六轴关节机器人的腕部关节主要采用谐波减速器。
六轴关节机器人机械结构教案
六轴关节机械结构教案.doc教案内容:一、教学目标:1. 了解六轴关节的基本概念和应用领域。
2. 掌握六轴关节的主要机械结构及其功能。
3. 能够分析六轴关节的运动学原理。
二、教学重点:1. 六轴关节的基本概念和应用领域。
2. 六轴关节的主要机械结构及其功能。
3. 六轴关节的运动学原理。
三、教学难点:1. 六轴关节的运动学原理。
2. 分析六轴关节的机械结构及其功能。
四、教学准备:1. PPT课件。
2. 六轴关节模型或图片。
3. 相关视频资料。
五、教学过程:1. 导入:通过展示六轴关节的实际应用场景,引起学生兴趣,引导学生思考六轴关节的基本概念。
2. 基本概念:介绍六轴关节的定义、分类和应用领域,让学生了解六轴关节的基本情况。
3. 主要机械结构及其功能:讲解六轴关节的主要机械结构,包括关节、连杆、驱动器等,并阐述各部分的功能和作用。
4. 运动学原理:讲解六轴关节的运动学原理,包括正运动学、逆运动学等,引导学生理解六轴关节的运动规律。
5. 课堂互动:组织学生进行小组讨论,分析六轴关节的机械结构及其功能,让学生通过实践操作加深对知识点的理解。
7. 课后作业:布置有关六轴关节机械结构的课后作业,巩固所学知识。
注意:在教学过程中,要注重理论与实践相结合,引导学生主动思考、积极参与,提高学生的实际操作能力。
及时解答学生在学习过程中遇到的问题,确保教学效果。
六、教学评价:1. 课堂表现:观察学生在课堂上的参与程度、提问回答情况,了解学生的学习兴趣和积极性。
2. 课后作业:评估学生课后作业的完成质量,检查学生对课堂所学知识的掌握程度。
3. 小组讨论:评价学生在小组讨论中的表现,包括分析问题、合作解决问题的能力。
七、教学反思:1. 课堂讲解是否清晰易懂,是否能够引导学生主动思考。
2. 实践操作是否充足,学生是否能够将理论知识运用到实际问题中。
3. 教学方法是否适合学生,是否需要调整教学策略以提高教学效果。
八、教学拓展:1. 介绍其他类型的关节,如旋转关节、滑动关节等。
6关节机器人介绍剖析

6关节机器人介绍剖析六关节机器人,也称为六轴机器人,是一种具有六个自由度的机器人系统。
每个关节都能够进行旋转,这使得机器人能够在三维空间中执行各种复杂的任务和动作。
下面我将对六关节机器人的结构、工作原理、应用领域以及优势进行介绍和剖析。
六关节机器人的结构主要由六个旋转关节组成,每个关节由电机驱动,通过齿轮传动或者其他传动方式将旋转运动传递到机械臂的末端。
这种结构使得机器人能够沿着不同的轴进行灵活的运动,实现各种复杂的动作。
同时,机器人的末端还可以配备各种工具或器械,从而可以在不同的领域中执行不同的任务。
六关节机器人的工作原理主要是通过控制每个关节的旋转角度,从而实现机械臂的整体运动。
通常采用的控制方式有PID控制、模糊控制、神经网络控制等。
通过计算机的精确控制,可以使机器人按照预先设定的路径或者姿态完成任务。
六关节机器人在各个领域都有广泛的应用。
在制造业中,它们可以完成各种组装、装卸、搬运、焊接等工作。
在医疗领域,它们可以辅助进行手术操作、康复训练等。
在军事领域,它们可以用于侦查、拆弹、装甲车维修等任务。
此外,它们还可以应用于航空航天、矿山、化工、食品加工等行业,为人们提供更安全、高效、精确的服务。
六关节机器人相比其他机器人系统具有一些独特的优势。
首先,六关节机器人具有较大的工作范围和灵活性,能够执行复杂的动作和路径规划。
其次,这种机器人的运动轨迹较为精准,可以实现高精度的定位和操作。
此外,六关节机器人在力矩和负载方面也具有较大的承载能力,可以应对不同的工作环境和工作负荷。
然而,六关节机器人也存在一些挑战和不足之处。
首先,它们通常需要较大的空间,并且布置和配置相对较为复杂。
其次,其运动控制需要较高的控制精度和计算能力,对控制系统提出了较高的要求。
此外,由于六关节机器人的结构较为复杂,对维护和保养也提出了较高的要求。
综上所述,六关节机器人是一种具有六个自由度的机器人系统,由六个旋转关节组成。
它们在制造业、医疗、军事等领域具有广泛的应用。
6轴轻型工业机器人的组成

通过铝管连接。 1.5 腕部3与机器人操作工具(如抓手)相连。
2. 控制箱和示教器是机器人的主控部分。
2.1 通过控制箱,用户可以控制各个关节的运动来移动机 器人末端工具,完成对机器人的控制和安全检测。
2.2 示教器为用户提供了一个可视化的操作界面。用户可以通过示教器对机器人进行测试,编程和F真。 2.2.1 示教器采用12.1寸触摸屏,便于用户在线操作。 2.2.2 简单易操作。无需任何编程基础可对机器人达到操作。 2.2.3 设有急停装置(红色按钮)。可停止机器人运动。
THANKS
山东卡特智能机器人有限公司
6轴轻型工业机器人
kate08
目录
01. 简介 02. 6轴轻型工业机器人(标配)组成
简介
. 机器人ห้องสมุดไป่ตู้体模仿人的手臂,共有6个关节,每个关节表示一个自由度。
6轴轻型工业机器人
1.1 A为基座,B是肩部,C为肘部,D、E、F为 手腕(腕部1、2、3)。
1.2 基座、肩部和肘部采用大扭矩模,腕部采用 的是小扭矩模块。
2.1.1 控制箱尺寸(长/宽/高):400/300/255 mm,
2.1.2 内部采用三代因特尔i7处理器。配有2G DDR3内存 和32G固态硬盘。
2.1.3 提供多个IO接口(DI(4)、DO(8)、AI(4)、 AO(2)、 4~20mA(1)),以及多种通讯方式(RS-232、RS-485、 CAN-Bus、100M TCP/IP、 Modbus TCP)。
六轴工业机器人的结构

六轴工业机器人的结构六轴工业机器人是一种高度灵活、功能强大的自动化设备。
它由六个关节组成,每个关节都可以进行独立运动,使机器人能够在各种复杂任务中精确操作。
下面将为大家介绍六轴工业机器人的结构。
首先,我们来看机器人的基本组成部分。
六轴机器人由底座、臂部、手部和控制系统组成。
底座是机器人的稳定支撑,臂部是连接各个关节的部分,手部负责完成具体任务,而控制系统则是机器人的智能大脑。
接下来是机器人的六个关节。
每个关节都有一个电机和减速器,用于驱动机器人的运动。
这些关节相互连接,形成机器人的骨架。
它们可以让机器人在三维空间内自由移动,并实现各种复杂的姿态。
每个关节都有自己的旋转轴,使机器人能够在不同方向上进行运动。
集中控制各个关节的电机,并通过编码器来监测实际位置,从而实现精确的运动控制。
这样的设计使得机器人能够灵活适应各种任务需求。
此外,机器人的手部也是非常重要的一部分。
它可以根据需要安装各种工具或夹具,完成不同的操作。
手部通常由几个可伸缩的指节和一个末端执行器组成。
末端执行器类似于人的手指,可以进行抓取、放置、旋转等各种动作。
最后,我们来谈一谈控制系统。
控制系统是机器人的大脑,负责接收并处理来自外部和传感器的信号,然后生成相应的输出命令,控制机器人的运动和行为。
现代的控制系统通常集成了先进的感知和决策算法,使机器人能够实现自主智能操作。
总的来说,六轴工业机器人的结构非常复杂和精确。
它们能够在工业生产线上扮演重要角色,提高生产效率和质量。
希望通过本文的介绍,大家对六轴机器人的结构有了更深入的了解,并对其在工业自动化领域的应用有一定的指导意义。
六轴关节机器人机械结构教案
六轴关节机械结构教案.doc教案第一章:概述1.1 课程目标让学生了解六轴关节的基本概念。
让学生了解六轴关节的应用领域。
让学生了解六轴关节的发展历程。
1.2 教学内容六轴关节的定义六轴关节的应用领域六轴关节的发展历程1.3 教学方法采用讲授法,讲解六轴关节的相关概念。
采用案例分析法,分析六轴关节的应用领域。
采用历史回顾法,回顾六轴关节的发展历程。
1.4 教学评估课堂问答:了解学生对六轴关节的定义的理解。
小组讨论:了解学生对六轴关节的应用领域的理解。
教案第二章:六轴关节的结构与原理2.1 课程目标让学生了解六轴关节的结构。
让学生了解六轴关节的工作原理。
2.2 教学内容六轴关节的结构六轴关节的工作原理2.3 教学方法采用讲授法,讲解六轴关节的结构。
采用实验演示法,展示六轴关节的工作原理。
2.4 教学评估课堂问答:了解学生对六轴关节结构的掌握情况。
实验报告:了解学生对六轴关节工作原理的理解。
教案第三章:六轴关节的编程与操作3.1 课程目标让学生掌握六轴关节的编程方法。
让学生掌握六轴关节的操作方法。
3.2 教学内容六轴关节的编程方法六轴关节的操作方法3.3 教学方法采用讲授法,讲解六轴关节的编程方法。
采用实践操作法,让学生操作六轴关节。
3.4 教学评估编程练习:了解学生对六轴关节编程方法的掌握情况。
操作考核:了解学生对六轴关节操作方法的掌握情况。
教案第四章:六轴关节的维护与保养4.1 课程目标让学生了解六轴关节的维护方法。
让学生了解六轴关节的保养方法。
4.2 教学内容六轴关节的维护方法六轴关节的保养方法4.3 教学方法采用讲授法,讲解六轴关节的维护方法。
采用实践操作法,让学生进行六轴关节的保养操作。
4.4 教学评估维护知识问答:了解学生对六轴关节维护知识的掌握情况。
保养操作考核:了解学生对六轴关节保养操作的掌握情况。
教案第五章:六轴关节的应用案例分析5.1 课程目标让学生了解六轴关节在不同领域的应用案例。
六轴机器人的组成

六轴机器人的组成
六轴机器人是目前工业自动化领域中应用最广泛的机器人之一,其
由多个部分组成。
下面是六轴机器人的组成和功能说明:
1. 机械臂
机械臂是机器人的主体部分,由多个关节组成,可以完成复杂的动作。
它的长度、材质和精度等参数需要根据具体需求进行选择和设计。
2. 控制系统
控制系统包括硬件和软件两部分,主要用于控制机器人的动作和运动
轨迹。
它需要与机械臂、传感器等其他部件协同工作,实现准确的操作。
3. 传感器
传感器用于感知环境和物体的位置、形状、大小等信息,并将这些信
息反馈给机器人的控制系统,以调整机器人的动作和运动轨迹。
4. 末端执行器
末端执行器指的是机械臂末端的装置,通常包括夹爪、吸盘等工具。
它负责机器人的具体操作,例如夹取、装配、搬运等。
5. 电源系统
电源系统提供机器人的电力供应,它需要同时满足机器人的功率需求和安全要求。
6. 通信模块
通信模块用于与其他设备进行数据交互,例如与工厂信息系统、自动化控制系统等进行实时通讯。
在一些应用场景中,还需要涉及到无线通讯和网络连接。
以上就是六轴机器人的主要组成部分。
在应用过程中,可以根据具体需要进行定制和改进,以满足不同的生产需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六轴关节机器人机械结构
e y . <7>J4 akis motor
<8>J5 axis / tiKi呂motor
说uation Mdr /
Flhaw
-U 」£: □nis rritx
r crc .inTi
* 12;、JE处也mn空
< 13 ■ J6 axis red jction gear
■ S J3 axi
reduct ken
/ \<1t)〉J5 酣仪timi啊belt i <
/ /<1 1>J5 3ME
Wrist hoqsine/ / r也[juGlidn 営凸mr
<2>J1 axis n'dijnt rm
3" J? miG irctci:
<4>J2 axis rrdi.nt nn £rn^
上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带
轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般
较大。
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的
旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。
对于工业机器人的机械结构
设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋
转的影响,是一个值得深入考虑的问题。
机器人的腕部结构常见有如下几种结构
•3RS
在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等关节设计:
对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经有好几十
年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对来说比较成熟,他们
在相互竞争中可以相互模仿、改善、不断推陈出新,他们的技术对于国内来说,近乎完美•而
国内目前这个行业还处在黎明前的黑暗阶段,虽然有不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试验成功,真正产业化、商品化还有一段相当漫长的路要走•而更多的公司还停留在项目立项、技术评估、投入风险分析的阶段•由于国内做这个行业的
很少,相关的结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别
人的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会A_A),还好了,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们做机械设计的(我应该也算是个机械工程师啊A_A毕竟我也是做机械的)少走点弯路,做出更好的机器•
六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动•小型的六轴关
节机器人的腕部关节主要采用谐波减速器•下面的图片较为详细的描述了常见的六轴关节机
器人的腕部结构•
上图所示的腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动
Welcome !!! 欢迎您的下载, 资料仅供参考!。