Adaptive Motion-Compensated Filtering Noisy Image Sequences
(调试)图像调试基本术语

(调试)图像调试基本术语图像调试基本术语镜头光学焦距与光轴平⾏的光线射⼊到凸透镜时,理想的镜头应该是所有的光线聚集到⼀点,再以锥形扩散开来,这个聚集所有光线的⼀点,就叫做焦点。
焦点距镜头中⼼的距离,或者在Camera中,镜头光学中⼼到成像平⾯(CCD或CMOS)的距离成为焦距。
弥散圆在焦点前后,光线开始聚集和扩散,点的影像变成模糊的,形成⼀个扩⼤的圆,这个圆叫做弥散圆。
如果弥散圆的直径⼩于⼈眼的鉴别能⼒,在⼀定范围内实际影像产⽣的模糊是⼈眼认为依旧清晰。
这个弥散圆称为容许弥散圆。
景深在焦点前后各有⼀个容许弥散圆,这两个弥散圆之间的距离就叫景深,即:在被摄主体(对焦点)前后,其影像仍然有⼀段清晰范围的,就是景深。
换⾔之,被摄体的前后纵深,呈现在底⽚⾯的影象模糊度,都在容许弥散圆的限定范围内。
视场⾓(Field of View,FOV)视场⾓是衡量⼀⽀相机镜头能够“看到”的最⼤视野范围的标度,通常以⾓度作为单位。
很明显,决定视场⾓的关键在于镜头焦距,焦距越长的镜头视场⾓越⼩。
光圈控制进光量的⼀种装置,光圈值通常有:f1 f1.4 f2 f2.8 f4 f5.6 f8 f11 f16 f22 f32,从左⾄右,相邻两个光圈进光量依次缩⼩⼀倍。
快门控制曝光时间的装置。
快门短可以拍摄⾼速运动的物体,但光的强度⼩;相反,在夜间拍摄,设置长快门可以获得更亮的图像。
光和图像⾊温⾊温是表⽰光线中包含颜⾊成分的⼀个计量单位,“K”(开尔⽂)。
分为绝对⾊温和相对⾊温。
绝对⾊温指⿊体在相应温度发出的光所含的光谱成分;相对⾊温,指光源的光谱接近某⼀温度⿊体的光谱成分,则称该光源的相对⾊温为该温度开尔⽂。
饱和度指⾊彩的明艳程度明度眼睛对光源和物体表⾯明暗程度的感觉灰度表⽰光的强度信息⾼低频图像中,低频表⽰图像的平滑区域,⾼频表⽰图像的边缘或噪声。
动态范围摄影机在同⼀场景中对最亮区域和较暗区域表现存在局限,计算⽅式是图像能分辨最亮光信号值与图像能分辨的最暗光信号值的⽐值。
mctf的原理

mctf的原理
MCTF,即运动补偿时域滤波(Motion-Compensated Temporal Filtering),是一种视频编码和图像处理中常用的技术。
它主
要用于减少视频序列中的运动伪影和噪音。
MCTF的原理基于以下几个步骤:
1. 运动估计:首先,通过比较图像帧之间的像素值来估计图像帧之间的运动矢量。
运动估计可以通过块匹配算法或光流估计算法来实现。
2. 运动补偿:根据运动估计的结果,将当前帧与之前的参考帧对齐,以产生一个用于表示运动差异的残差帧。
3. 帧间滤波:对残差帧进行时域滤波,以减少运动伪影和噪音。
这可以通过各种滤波器(如均值滤波器、中值滤波器、自适应滤波器等)来实现。
4. 补偿重建:将滤波后的残差帧与参考帧相加,以重建原始帧。
MCTF的原理在视频编码中起到了关键作用。
通过对运动矢量进行编码,以及通过滤波来减少运动伪影和噪音,可以有效地提高视频的压缩效率和视觉质量。
这使得视频能够在较低的码率下保持较高的质量。
此外,MCTF还可以用于视频增强和去噪等图像处理领域。
车辆控制系统说明书
IndexAactuation layer, 132average brightness,102-103adaptive control, 43Badaptive cruise control, 129backpropagation algorithm, 159adaptive FLC, 43backward driving mode,163,166,168-169adaptive neural networks,237adaptive predictive model, 283Baddeley-Molchanov average, 124aerial vehicles, 240 Baddeley-Molchanov fuzzy set average, 120-121, 123aerodynamic forces,209aerodynamics analysis, 208, 220Baddeley-Molchanov mean,118,119-121alternating filter, 117altitude control, 240balance position, 98amplitude distribution, 177bang-bang controller,198analytical control surface, 179, 185BCFPI, 61-63angular velocity, 92,208bell-shaped waveform,25ARMAX model, 283beta distributions,122artificial neural networks,115Bezier curve, 56, 59, 63-64association, 251Bezier Curve Fuzzy PI controller,61attitude angle,208, 217Bezier function, 54aumann mean,118-120bilinear interpolation, 90, 300,302automated manual transmission,145,157binary classifier,253Bo105 helicopter, 208automatic formation flight control,240body frame,238boiler following mode,280,283automatic thresholding,117border pixels, 101automatic transmissions,145boundary layer, 192-193,195-198autonomous robots,130boundary of a fuzzy set,26autonomous underwater vehicle, 191braking resistance, 265AUTOPIA, 130bumpy control surface, 55autopilot signal, 228Index 326CCAE package software, 315, 318 calibration accuracy, 83, 299-300, 309, 310, 312CARIMA models, 290case-based reasoning, 253center of gravity method, 29-30, 32-33centroid defuzzification, 7 centroid defuzzification, 56 centroid Method, 106 characteristic polygon, 57 characterization, 43, 251, 293 chattering, 6, 84, 191-192, 195, 196, 198chromosomes, 59circuit breaker, 270classical control, 1classical set, 19-23, 25-26, 36, 254 classification, 106, 108, 111, 179, 185, 251-253classification model, 253close formation flight, 237close path tracking, 223-224 clustering, 104, 106, 108, 251-253, 255, 289clustering algorithm, 252 clustering function, 104clutch stroke, 147coarse fuzzy logic controller, 94 collective pitch angle, 209 collision avoidance, 166, 168 collision avoidance system, 160, 167, 169-170, 172collision avoidance system, 168 complement, 20, 23, 45 compressor contamination, 289 conditional independence graph, 259 confidence thresholds, 251 confidence-rated rules, 251coning angle, 210constant gain, 207constant pressure mode, 280 contrast intensification, 104 contrast intensificator operator, 104 control derivatives, 211control gain, 35, 72, 93, 96, 244 control gain factor, 93control gains, 53, 226control rules, 18, 27, 28, 35, 53, 64, 65, 90-91, 93, 207, 228, 230, 262, 302, 304-305, 315, 317control surfaces, 53-55, 64, 69, 73, 77, 193controller actuator faulty, 289 control-weighting matrix, 207 convex sets, 119-120Coordinate Measurement Machine, 301coordinate measuring machine, 96 core of a fuzzy set, 26corner cube retroreflector, 85 correlation-minimum, 243-244cost function, 74-75, 213, 282-283, 287coverage function, 118crisp input, 18, 51, 182crisp output, 7, 34, 41-42, 51, 184, 300, 305-306crisp sets, 19, 21, 23crisp variable, 18-19, 29critical clearing time, 270 crossover, 59crossover probability, 59-60cruise control, 129-130,132-135, 137-139cubic cell, 299, 301-302, 309cubic spline, 48cubic spline interpolation, 300 current time gap, 136custom membership function, 294 customer behav or, 249iDdamping factor, 211data cleaning, 250data integration, 250data mining, 249, 250, 251-255, 259-260data selection, 250data transformation, 250d-dimensional Euclidean space, 117, 124decision logic, 321 decomposition, 173, 259Index327defuzzification function, 102, 105, 107-108, 111 defuzzifications, 17-18, 29, 34 defuzzifier, 181, 242density function, 122 dependency analysis, 258 dependency structure, 259 dependent loop level, 279depth control, 202-203depth controller, 202detection point, 169deviation, 79, 85, 185-188, 224, 251, 253, 262, 265, 268, 276, 288 dilation, 117discriminated rules, 251 discrimination, 251, 252distance function, 119-121 distance sensor, 167, 171 distribution function, 259domain knowledge, 254-255 domain-specific attributes, 251 Doppler frequency shift, 87 downhill simplex algorithm, 77, 79 downwash, 209drag reduction, 244driver’s intention estimator, 148 dutch roll, 212dynamic braking, 261-262 dynamic fuzzy system, 286, 304 dynamic tracking trajectory, 98Eedge composition, 108edge detection, 108 eigenvalues, 6-7, 212electrical coupling effect, 85, 88 electrical coupling effects, 87 equilibrium point, 207, 216 equivalent control, 194erosion, 117error rates, 96estimation, 34, 53, 119, 251, 283, 295, 302Euler angles, 208evaluation function, 258 evolution, 45, 133, 208, 251 execution layer, 262-266, 277 expert knowledge, 160, 191, 262 expert segmentation, 121-122 extended sup-star composition, 182 Ffault accommodation, 284fault clearing states, 271, 274fault detection, 288-289, 295fault diagnosis, 284fault durations, 271, 274fault isolation, 284, 288fault point, 270-271, 273-274fault tolerant control, 288fault trajectories, 271feature extraction, 256fiber glass hull, 193fin forces, 210final segmentation, 117final threshold, 116fine fuzzy controller, 90finer lookup table, 34finite element method, 318finite impulse responses, 288firing weights, 229fitness function, 59-60, 257flap angles, 209flight aerodynamic model, 247 flight envelope, 207, 214, 217flight path angle, 210flight trajectory, 208, 223footprint of uncertainty, 176, 179 formation geometry, 238, 247 formation trajectory, 246forward driving mode, 163, 167, 169 forward flight control, 217 forward flight speed, 217forward neural network, 288 forward velocity, 208, 214, 217, 219-220forward velocity tracking, 208 fossil power plants, 284-285, 296 four-dimensional synoptic data, 191 four-generator test system, 269 Fourier filter, 133four-quadrant detector, 79, 87, 92, 96foveal avascular zone, 123fundus images, 115, 121, 124 fuselage, 208-210Index 328fuselage axes, 208-209fuselage incidence, 210fuzz-C, 45fuzzifications, 18, 25fuzzifier, 181-182fuzzy ACC controller, 138fuzzy aggregation operator, 293 fuzzy ASICs, 37-38, 50fuzzy binarization algorithm, 110 fuzzy CC controller, 138fuzzy clustering algorithm, 106, 108 fuzzy constraints, 286, 291-292 fuzzy control surface, 54fuzzy damage-mitigating control, 284fuzzy decomposition, 108fuzzy domain, 102, 106fuzzy edge detection, 111fuzzy error interpolation, 300, 302, 305-306, 309, 313fuzzy filter, 104fuzzy gain scheduler, 217-218 fuzzy gain-scheduler, 207-208, 220 fuzzy geometry, 110-111fuzzy I controller, 76fuzzy image processing, 102, 106, 111, 124fuzzy implication rules, 27-28 fuzzy inference system, 17, 25, 27, 35-36, 207-208, 302, 304-306 fuzzy interpolation, 300, 302, 305- 307, 309, 313fuzzy interpolation method, 309 fuzzy interpolation technique, 300, 309, 313fuzzy interval control, 177fuzzy mapping rules, 27fuzzy model following control system, 84fuzzy modeling methods, 255 fuzzy navigation algorithm, 244 fuzzy operators, 104-105, 111 fuzzy P controller, 71, 73fuzzy PD controller, 69fuzzy perimeter, 110-111fuzzy PI controllers, 61fuzzy PID controllers, 53, 64-65, 80 fuzzy production rules, 315fuzzy reference governor, 285 Fuzzy Robust Controller, 7fuzzy set averages, 116, 124-125 fuzzy sets, 7, 19, 22, 24, 27, 36, 45, 115, 120-121, 124-125, 151, 176-182, 184-188, 192, 228, 262, 265-266fuzzy sliding mode controller, 192, 196-197fuzzy sliding surface, 192fuzzy subsets, 152, 200fuzzy variable boundary layer, 192 fuzzyTECH, 45Ggain margins, 207gain scheduling, 193, 207, 208, 211, 217, 220gas turbines, 279Gaussian membership function, 7 Gaussian waveform, 25 Gaussian-Bell waveforms, 304 gear position decision, 145, 147 gear-operating lever, 147general window function, 105 general-purpose microprocessors, 37-38, 44genetic algorithm, 54, 59, 192, 208, 257-258genetic operators, 59-60genetic-inclined search, 257 geometric modeling, 56gimbal motor, 90, 96global gain-scheduling, 220global linear ARX model, 284 global navigation satellite systems, 141global position system, 224goal seeking behaviour, 186-187 governor valves80, 2HHamiltonian function, 261, 277 hard constraints, 283, 293 heading angle, 226, 228, 230, 239, 240-244, 246heading angle control, 240Index329heading controller, 194, 201-202 heading error rate, 194, 201 heading speed, 226heading velocity control, 240 heat recovery steam generator, 279 hedges, 103-104height method, 29helicopter, 207-212, 214, 217, 220 helicopter control matrix, 211 helicopter flight control, 207 Heneghan method, 116-117, 121-124heuristic search, 258 hierarchical approaches, 261 hierarchical architecture, 185 hierarchical fuzzy processors, 261 high dimensional systems, 191 high stepping rates, 84hit-miss topology, 119home position, 96horizontal tail plane, 209 horizontal tracker, 90hostile, 223human domain experts, 255 human visual system, 101hybrid system framework, 295 hyperbolic tangent function, 195 hyperplane, 192-193, 196 hysteresis thres olding, 116-117hIIF-THEN rule, 27-28image binarization, 106image complexity, 104image fuzzification function, 111 image segmentation, 124image-expert, 122-123indicator function, 121inert, 223inertia frame, 238inference decision methods, 317 inferential conclusion, 317 inferential decision, 317 injection molding process, 315 inner loop controller, 87integral time absolute error, 54 inter-class similarity, 252 internal dependencies, 169 interpolation property, 203 interpolative nature, 262 intersection, 20, 23-24, 31, 180 interval sets, 178interval type-2 FLC, 181interval type-2 fuzzy sets, 177, 180-181, 184inter-vehicle gap, 135intra-class similarity, 252inverse dynamics control, 228, 230 inverse dynamics method, 227 inverse kinema c, 299tiJ - Kjoin, 180Kalman gain, 213kinematic model, 299kinematic modeling, 299-300 knowledge based gear position decision, 148, 153knowledge reasoning layer, 132 knowledge representation, 250 knowledge-bas d GPD model, 146eLlabyrinths, 169laser interferometer transducer, 83 laser tracker, 301laser tracking system, 53, 63, 65, 75, 78-79, 83-85, 87, 98, 301lateral control, 131, 138lateral cyclic pitch angle, 209 lateral flapping angle, 210 leader, 238-239linear control surface, 55linear fuzzy PI, 61linear hover model, 213linear interpolation, 300-301, 306-307, 309, 313linear interpolation method, 309 linear optimal controller, 207, 217 linear P controller, 73linear state feedback controller, 7 linear structures, 117linear switching line, 198linear time-series models, 283 linguistic variables, 18, 25, 27, 90, 102, 175, 208, 258Index 330load shedding, 261load-following capabilities, 288, 297 loading dock, 159-161, 170, 172 longitudinal control, 130-132 longitudinal cyclic pitch angle, 209 longitudinal flapping angle, 210 lookup table, 18, 31-35, 40, 44, 46, 47-48, 51, 65, 70, 74, 93, 300, 302, 304-305lower membership functions, 179-180LQ feedback gains, 208LQ linear controller, 208LQ optimal controller, 208LQ regulator, 208L-R fuzzy numbers, 121 Luenburger observer, 6Lyapunov func on, 5, 192, 284tiMMamdani model, 40, 46 Mamdani’s method, 242 Mamdani-type controller, 208 maneuverability, 164, 207, 209, 288 manual transmissions, 145 mapping function, 102, 104 marginal distribution functions, 259 market-basket analysis, 251-252 massive databases, 249matched filtering, 115 mathematical morphology, 117, 127 mating pool, 59-60max member principle, 106max-dot method, 40-41, 46mean distance function, 119mean max membership, 106mean of maximum method, 29 mean set, 118-121measuring beam, 86mechanical coupling effects, 87 mechanical layer, 132median filter, 105meet, 7, 50, 139, 180, 183, 302 membership degree, 39, 257 membership functions, 18, 25, 81 membership mapping processes, 56 miniature acrobatic helicopter, 208 minor steady state errors, 217 mixed-fuzzy controller, 92mobile robot control, 130, 175, 181 mobile robots, 171, 175-176, 183, 187-189model predictive control, 280, 287 model-based control, 224 modeless compensation, 300 modeless robot calibration, 299-301, 312-313modern combined-cycle power plant, 279modular structure, 172mold-design optimization, 323 mold-design process, 323molded part, 318-321, 323 morphological methods, 115motor angular acceleration, 3 motor plant, 3motor speed control, 2moving average filter, 105 multilayer fuzzy logic control, 276 multimachine power system, 262 multivariable control, 280 multivariable fuzzy PID control, 285 multivariable self-tuning controller, 283, 295mutation, 59mutation probability, 59-60mutual interference, 88Nnavigation control, 160neural fuzzy control, 19, 36neural networks, 173, 237, 255, 280, 284, 323neuro-fuzzy control, 237nominal plant, 2-4nonlinear adaptive control, 237non-linear control, 2, 159 nonlinear mapping, 55nonlinear switching curve, 198-199 nonlinear switching function, 200 nonvolatile memory, 44 normalized universe, 266Oobjective function, 59, 74-75, 77, 107, 281-282, 284, 287, 289-291,Index331295obstacle avoidance, 166, 169, 187-188, 223-225, 227, 231 obstacle avoidance behaviour, 187-188obstacle sensor, 224, 228off-line defuzzification, 34off-line fuzzy inference system, 302, 304off-line fuzzy technology, 300off-line lookup tables, 302 offsprings, 59-60on-line dynamic fuzzy inference system, 302online tuning, 203open water trial, 202operating point, 210optical platform, 92optimal control table, 300optimal feedback gain, 208, 215-216 optimal gains, 207original domain, 102outer loop controller, 85, 87outlier analysis, 251, 253output control gains, 92 overshoot, 3-4, 6-7, 60-61, 75-76, 94, 96, 193, 229, 266Ppath tracking, 223, 232-234 pattern evaluation, 250pattern vector, 150-151PD controller, 4, 54-55, 68-69, 71, 74, 76-77, 79, 134, 163, 165, 202 perception domain, 102 performance index, 60, 207 perturbed plants, 3, 7phase margins, 207phase-plan mapping fuzzy control, 19photovoltaic power systems, 261 phugoid mode, 212PID, 1-4, 8, 13, 19, 53, 61, 64-65, 74, 80, 84-85, 87-90, 92-98, 192 PID-fuzzy control, 19piecewise nonlinear surface, 193 pitch angle, 202, 209, 217pitch controller, 193, 201-202 pitch error, 193, 201pitch error rate, 193, 201pitch subsidence, 212planetary gearbox, 145point-in-time transaction, 252 polarizing beam-splitter, 86 poles, 4, 94, 96position sensor detectors, 84 positive definite matrix, 213post fault, 268, 270post-fault trajectory, 273pre-defined membership functions, 302prediction, 251, 258, 281-283, 287, 290predictive control, 280, 282-287, 290-291, 293-297predictive supervisory controller, 284preview distance control, 129 principal regulation level, 279 probabilistic reasoning approach, 259probability space, 118Problem understanding phases, 254 production rules, 316pursuer car, 136, 138-140 pursuer vehicle, 136, 138, 140Qquadrant detector, 79, 92 quadrant photo detector, 85 quadratic optimal technology, 208 quadrilateral ob tacle, 231sRradial basis function, 284 random closed set, 118random compact set, 118-120 rapid environment assessment, 191 reference beam, 86relative frame, 240relay control, 195release distance, 169residual forces, 217retinal vessel detection, 115, 117 RGB band, 115Riccati equation, 207, 213-214Index 332rise time, 3, 54, 60-61, 75-76road-environment estimator, 148 robot kinematics, 299robot workspace, 299-302, 309 robust control, 2, 84, 280robust controller, 2, 8, 90robust fuzzy controller, 2, 7 robustness property, 5, 203roll subsidence, 212rotor blade flap angle, 209rotor blades, 210rudder, 193, 201rule base size, 191, 199-200rule output function, 191, 193, 198-199, 203Runge-Kutta m thod, 61eSsampling period, 96saturation function, 195, 199 saturation functions, 162scaling factor, 54, 72-73scaling gains, 67, 69S-curve waveform, 25secondary membership function, 178 secondary memberships, 179, 181 selection, 59self-learning neural network, 159 self-organizing fuzzy control, 261 self-tuning adaptive control, 280 self-tuning control, 191semi-positive definite matrix, 213 sensitivity indices, 177sequence-based analysis, 251-252 sequential quadratic programming, 283, 292sets type-reduction, 184setting time, 54, 60-61settling time, 75-76, 94, 96SGA, 59shift points, 152shift schedule algorithms, 148shift schedules, 152, 156shifting control, 145, 147shifting schedules, 146, 152shift-schedule tables, 152sideslip angle, 210sigmoidal waveform, 25 sign function, 195, 199simplex optimal algorithm, 80 single gimbal system, 96single point mass obstacle, 223 singleton fuzzification, 181-182 sinusoidal waveform, 94, 300, 309 sliding function, 192sliding mode control, 1-2, 4, 8, 191, 193, 195-196, 203sliding mode fuzzy controller, 193, 198-200sliding mode fuzzy heading controller, 201sliding pressure control, 280 sliding region, 192, 201sliding surface, 5-6, 192-193, 195-198, 200sliding-mode fuzzy control, 19 soft constraints, 281, 287space-gap, 135special-purpose processors, 48 spectral mapping theorem, 216 speed adaptation, 138speed control, 2, 84, 130-131, 133, 160spiral subsidence, 212sporadic alternations, 257state feedback controller, 213 state transition, 167-169state transition matrix, 216state-weighting matrix, 207static fuzzy logic controller, 43 static MIMO system, 243steady state error, 4, 54, 79, 90, 94, 96, 98, 192steam turbine, 279steam valving, 261step response, 4, 7, 53, 76, 91, 193, 219stern plane, 193, 201sup operation, 183supervisory control, 191, 280, 289 supervisory layer, 262-264, 277 support function, 118support of a fuzzy set, 26sup-star composition, 182-183 surviving solutions, 257Index333swing curves, 271, 274-275 switching band, 198switching curve, 198, 200 switching function, 191, 194, 196-198, 200switching variable, 228system trajector192, 195y,Ttail plane, 210tail rotor, 209-210tail rotor derivation, 210Takagi-Sugeno fuzzy methodology, 287target displacement, 87target time gap, 136t-conorm maximum, 132 thermocouple sensor fault, 289 thickness variable, 319-320three-beam laser tracker, 85three-gimbal system, 96throttle pressure, 134throttle-opening degree, 149 thyristor control, 261time delay, 63, 75, 91, 93-94, 281 time optimal robust control, 203 time-gap, 135-137, 139-140time-gap derivative, 136time-gap error, 136time-invariant fuzzy system, 215t-norm minimum, 132torque converter, 145tracking error, 79, 84-85, 92, 244 tracking gimbals, 87tracking mirror, 85, 87tracking performance, 84-85, 88, 90, 192tracking speed, 75, 79, 83-84, 88, 90, 92, 97, 287trajectory mapping unit, 161, 172 transfer function, 2-5, 61-63 transient response, 92, 193 transient stability, 261, 268, 270, 275-276transient stability control, 268 trapezoidal waveform, 25 triangular fuzzy set, 319triangular waveform, 25 trim, 208, 210-211, 213, 217, 220, 237trimmed points, 210TS fuzzy gain scheduler, 217TS fuzzy model, 207, 290TS fuzzy system, 208, 215, 217, 220 TS gain scheduler, 217TS model, 207, 287TSK model, 40-41, 46TS-type controller, 208tuning function, 70, 72turbine following mode, 280, 283 turn rate, 210turning rate regulation, 208, 214, 217two-DOF mirror gimbals, 87two-layered FLC, 231two-level hierarchy controllers, 275-276two-module fuzzy logic control, 238 type-0 systems, 192type-1 FLC, 176-177, 181-182, 185- 188type-1 fuzzy sets, 177-179, 181, 185, 187type-1 membership functions, 176, 179, 183type-2 FLC, 176-177, 180-183, 185-189type-2 fuzzy set, 176-180type-2 interval consequent sets, 184 type-2 membership function, 176-178type-reduced set, 181, 183-185type-reduction,83-1841UUH-1H helicopter, 208uncertain poles, 94, 96uncertain system, 93-94, 96 uncertain zeros, 94, 96underlying domain, 259union, 20, 23-24, 30, 177, 180unit control level, 279universe of discourse, 19-24, 42, 57, 151, 153, 305unmanned aerial vehicles, 223 unmanned helicopter, 208Index 334unstructured dynamic environments, 177unstructured environments, 175-177, 179, 185, 187, 189upper membership function, 179Vvalve outlet pressure, 280vapor pressure, 280variable structure controller, 194, 204velocity feedback, 87vertical fin, 209vertical tracker, 90vertical tracking gimbal, 91vessel detection, 115, 121-122, 124-125vessel networks, 117vessel segmentation, 115, 120 vessel tracking algorithms, 115 vision-driven robotics, 87Vorob’ev fuzzy set average, 121-123 Vorob'ev mean, 118-120vortex, 237 WWang and Mendel’s algorithm, 257 WARP, 49weak link, 270, 273weighing factor, 305weighting coefficients, 75 weighting function, 213weld line, 315, 318-323western states coordinating council, 269Westinghouse turbine-generator, 283 wind–diesel power systems, 261 Wingman, 237-240, 246wingman aircraft, 238-239 wingman veloc y, 239itY-ZYager operator, 292Zana-Klein membership function, 124Zana-Klein method, 116-117, 121, 123-124zeros, 94, 96µ-law function, 54µ-law tuning method, 54。
自适应滤波Adaptive

12
Dr. JI ZHEN
7
4 LMS算法Least Mean Square
n
s = 2 sin( 2πk +φ) N
+
Z-1
W1
W2
d = 2 cos(
+ +
2πk +φ) N
+
-
e
二阶自适应滤波器
输入中噪声为零均值、方差σ 2 的白噪声,求 w* 及 E[e 2 ]min
Dr. JI ZHEN
8
4 LMS算法Least Mean Square
自适应滤波Adaptive Filtering
纪震博士Dr.Ji Zhen, Associate Prof. Faculty of Information Engineering, SZU 2002.12
1
1.引言
自适应(Adaptation)
当外界情况变化时,物体可以本能地作自我调整,以便与新的外界 条件相适应。
W =W j1
E[ej2]
E[e 2 ] j 相反, > 0,则W j 2必定在W *的右边,所以应该W j2 +1 = W j2 W W W =W
j2
Wj1 W*
Wj2
可以合并为W j +1 = W j1
E[e 2 ] j W
W =W j
= W j1 2 E[e j (
e j
W1 W2
,
e j
m=0 i =1 N 1 N
其中 i = m + 1, hi = h[i 1], xi = x[ n i 1] 所以,输出 y[n] 是 N 个过去输入样本的线性加权和,加权系数就是 {hi } , 也可以写成 y[n] =
一种基于运动补偿的时域自适应视频降噪算法

( 2) 在运动轨迹上 , 根据当前宏块和参考宏块 二者的共同信息检测当前宏块的运动强度 . ( 3) 根据运动强度设置当前宏块的滤波强度, 从而确定当前宏块和参考宏块滤波的权重 . ( 4) 按照当前宏块和参考宏块的权重, 进行加 权平均滤波 , 完成沿着运动轨迹的自适应加权平均 滤波. 2. 2 运动补偿技术 在本文提出的算法中, 采用 16* 16 像素大小的 宏块进行运动补偿. 在当前帧中的每个宏块采用最 小 SAD( Sum o f Abso lut e Dif ferences) 准则, 在前一 帧中进行搜索, 找到对应当前宏块 SAD 值最小的宏 块 , 这个宏块是前一帧内对应于当前宏块最匹配的 宏块, 我们称它为参考宏块 . 按照文献 [ 6] , SAD 定 义如公式( 1) 所示 : SAD =
Abstract: Noise in video signals w ill deg rade t he quality of image. A t emporal adapt ive f il ter based o n a mo t ion com pensation is proposed f or noise reduct ion. T he no ise in video sequence is t racked by t he m ot io n com pensat io n in t emporal do main. T he f ilt er ing st reng th can be adaptiv ely chang ed on the mot ion sit uat ion of a subject . T he exper im ent al result s show that t he pr opo sed filt er is bet ter t han that in spat ial domain. T he noise in v ideo signals can be ef fectively reduced and t he imag e w ill not be so blurry as the result of spat ial f ilt er. Key words: mot ion compensation; adapt ive temporal filt er; motion st rength detect ion; video noise reduction EEACC: 6430H
双边运动估计与自适应重叠块运动补偿

ref:Motion-Compensated Frame Interpolation Using Bilateral Motion Estimation and Adaptive
Overlapped Block Motion Compensation
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 17, NO. 4, APRIL 20
● 在本文中,我们提出了一种采用双边ME和自适应OBMC(AOBMC)的新型MCI方法。 ● 所提出的双边ME可以通过直接估计内插帧的运动矢量来防止孔问题以及重叠问题。 ● 所提出的算法使用AOBMC,该AOBMC通过根据运动矢量的可靠性控制重叠窗口的权重来忠实地
重建插值帧。 ● 此外,该算法采用运动分割方案将帧划分为多个对象区域, ● 并使用可变大小块MC(VS-BMC)方案准确地插入对象边界
● 在MCI中,我们应该估计每个插值像素的运动矢量。 ● 如果使用常规BMA在前一帧和后一帧之间找到逐块运动矢量场, ● 则运动轨迹可能不会覆盖内插帧中的所有像素,因此会产生孔区域。 ● 另外,多个轨迹可能穿过同一像素,从而导致重叠区域。 ● 因此,我们应该为插值帧中的块估计运动矢量, ● 而不是使用前一帧和后一帧之间的运动矢量。 ● 接下来,我们总结常规算法以获得内插帧的运动矢量。
● MCI中需要解决三个问题。 ● 首先,应该准确地估计运动信息以忠实地重建内插帧。 ● 大多数MCI算法都使用块匹配算法(BMA)进行运动估计(ME)。 BMA简单易行[1] – [3]。 ● 它还生成一个紧凑表示的运动场。 ● 但是,与视频压缩不同,在MCI中找到真实的运动轨迹更为重要。 ● 注意,MCI中MC的目的不是要最小化MC残差信号的能量, ● 而是要重建具有更好视觉质量的插值帧。 ● 由于传统BMA的运动矢量通常不忠实于真实的物体运动, ● 因此在最近的工作中提出了几种更精确的ME的方法[4] – [6]。 ● 在[7]中,de Haan等。 提出了一种3D递归ME,由于其快速收敛和高精度,已被应用于多种
【数字图像处理】期末复习资料及期末模拟试卷(含答案)doc
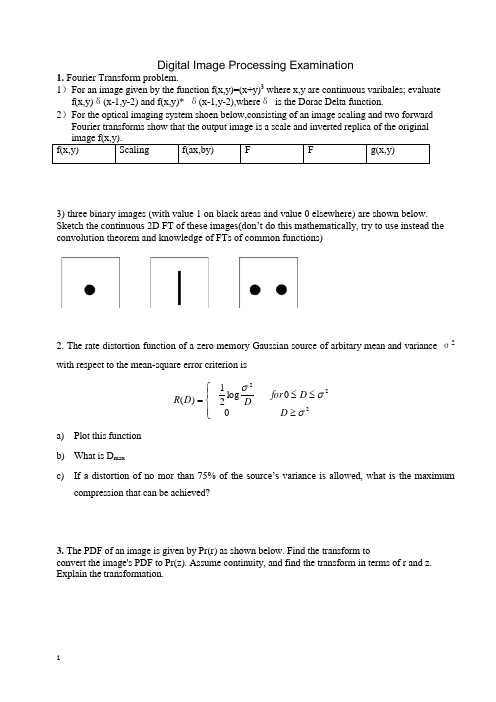
Digital Image Processing Examination1. Fourier Transform problem.1) F or an image given by the function f(x,y)=(x+y)3 where x,y are continuous varibales; evaluatef(x,y)δ(x-1,y-2) and f(x,y)* δ(x-1,y-2),where δ is the Dorac Delta function.2) F or the optical imaging system shoen below,consisting of an image scaling and two forwardFourier transforms show that the output image is a scale and inverted replica of the original3) three binary images (with value 1 on black areas and value 0 elsewhere) are shown below. Sketch the continuous 2D FT of these images(don’t do this mathematically, try to use instead the convolution theorem and knowledge of FTs of common functions)2. The rate distortion function of a zero memory Gaussian source of arbitary mean and variance σ2 with respect to the mean-square error criterion is⎪⎩⎪⎨⎧≥≤≤=2220log 21)(σσσD D for D D Ra) Plot this functionb) What is D max c) If a distortion of no mor than 75% of the source’s variance is allowed, what is the maximumcompression that can be achieved?3. The PDF of an image is given by Pr(r) as shown below. Find the transform toconvert the image's PDF to Pr(z). Assume continuity, and find the transform in terms of r and z. Explain the transformation.4. A certain inspection application gathers black & white images of parts as they travel along a con-veyor belt. It is necessary to sort the parts into two categories: parts with holes and parts with-out holes. An example of an image that might be taken by the inspection camera is shown at the right. Propose a method to identify and locate the objects of each category in the image so that they can be picked up by a robotic system and placed in different bins. Assume that the imaging system knows where each image pixel is located on the conveyor belt at every point in time.Provide an annotated flow chart of the algorithm you propose.5.In a given application, an averaging mask is applied to input images to reduce noise and then aLaplacian mask is applied to enhance small details. Would mathematics predict that the result should be the same if the order of the operations were reversed? What practical issues would be encountered in computer implementation?Digital Image Processing Examination1. A preprocessing step in an application of microscopy is concerned with the issue ofisolating individual round particles from similar particles that overlap in groups of two or more.Assuming that all particles are of the same size, propose a morphological algorithm that will produce an image that contains only the isolated (non-overlapping) particles that are not in contact with the boundary of the image.2. An image represented by a continuous function f(x, y) is w = 2 cm wide and h = 3 cm high. The imageis to be converted to an array of pixels by a scanner whose response is zero above 80 lines/centimeter in both the horizontal and vertical directions. The discrete image is represented by an array ˆf(n, m) where n and m take on integer values, 0 ~ n ~ N - 1, 0~ m ~ M-1.(a)Determine suitable values for N and M.(b)Assume that ˆf(n, m) = f(na, mb). Determine the values of a and b.(c)Determine constants A, B, C, D, E such that the DFT of fˆ can be expressed as)(00) ,() , (EvmDuniBnCmemnfAvu F+-==∑∑=(d)Find numbers (P1, P2) such that F(u + jP1, v + kP2) = F(u, v) for any integers j, k, u, v.3. The arithmetic decoding process is the reverse of the encoding procedure. Decode the message 0.23355 given the coding model.4. The gradient of a function f (x) is defined as⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=∇y f x f G G f y xComputationally, the first derivative is implemented by calculating the difference between adjacent pixels.(a) Is the following a linear operator?2122⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=∇y f x f f (b) State how would you implement the above operator using differences between pixels.(c) A Sobel operator uses two masks, Hx and Hy to process an image. Explain why are two masksneeded and what do they measure?(d)Write down the masks Hx and Hy, and identify them in the followingfigures:5. The three images shown were blurred using square averaging masks of sizes n=23, 25 , and 45, respectively. The vertical bars on the left lower part of (a) and (c) are blurred, but a clear separation exists between them. However, the bars have merged in image (b), in spite of the fact that the mask that produced this image is significantly smaller than the mask that produced image (c). explain this.Digital Image Processing Examination1. An image array f(m, n) of size M1 × N1 is to be convolved with a filter array h(m, n) of size M2 × N2 to produce a new image array g(m, n).1)Write a pseudo code program that describes a method to compute g(m, n) throughthe use of Fourier transforms. The result should be the same size as would beachieved with direct convolution.2)Modify the algorithm so that it does the correlation f ~ h rather than theconvolution.2. You have the job of designing an algorithm that will count the number of objects with holes and the number of objects without holes in images of the kind shown here. Assume that the images are binary with 0 corresponding to black and 1 correspondingto white. The imaging system is of low quality and produces images that are corrupted with salt and pepper noise.The objects do not overlap or touch, but may be close to each other in any direction.They may be of any shape or size. The algorithm should not be confused by the salt and pepper noise, and should not count noise pixels as objects.Write a pseudo-code description of your algorithm. You may also include a block diagram and other information to make it understandable to a programmer. State any assumptions you make, such as: “Objects must contain at least 50 pixels.”least 50 pixels.”3. Suppose that an image has the gray-level probability density functions shown. Here, p 1(z) corresponds to objects and p 2(z) corresponds to the background. Assume that p 1=p 2 and find the optimal threshold between object and back ground pixels.4. The Sobel operator computes the following quantity at each location (x, y) in an image array, A:Gx[j,k]=(A[j+1,k+1]+2A[j+1,k]+A[j+1,k-1])-(A[j-1,k+1]+2A[j-1,k]+A[j-1,k-1]) Gy[j,k]=(A[j-1,k-1]+2A[j,k-1]+A[j+1,k-1])-(A[j-1,k+1]+2A[j,k+1]+A[j+1,k+1]) G[j,k] = |Gx[j,k]| + |Gy[j,k]|The position of A[j, k] is column j and row k of the array.The operation is implemented as the convolution of the image array A with two masks, Mx and My followed by the magnitude operation.1) Write a 3 × 3 array for each mask, Mx and My.2) What mathematical operation on an image array is approximated by the Sobeloperator? Show how the Sobel operator is related to the mathematical operation.5. Answer the following questions about morphological image processing.(a) Shown below are two tables with expressions that relate to binary morphological image processing. Associate each expression in the left table with one from the right table.(b) A well-known morphological algorithm uses the following iteration with a structuring element B.(1) Initialize X[p] = 1 for some pixel A p ∈(2) A B X Y )(⊕=(3) If X Y ≠ then set X = Y and repeat (2)An original set A is shown in (A) and an initial pixel p 2 A is shown in (B). The result after one iteration of the algorithm with structuring element⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010111010Bis shown in (C). Fill in the result of the next two iterations by marking theappropriate pixels for the set Y in (D) and (E). In frame (F) show the result for Y that would be reached after a large number of iterations.Digital Image Processing Examination1. Consider the edge model depicted below. Sketch the gradient and Laplacian of the signal. It is not needed to compute exact numerical values in your answer. Plot of approximate shapes of the responses will be sufficient.2. The white bars in the test pattern shown are 7pixels wide and 210 pixels high. The separation between bars is 17 pixels. What would this image look like after application of .1) A 3*3 arithmetic mean filter?2) A 7*7 median filter.3) A 9*9 contraharmonic mean filter with Q=13. The video coding system introduced in the class utilizes several major components –inter-frame motion estimation, motion compensated prediction, DCT, Huffman coding,and quantization.(a)When an encoded signal can be used to reconstruct the exact value of theoriginal signal, we say the encoding method is lossless; otherwise, it’s calledlossy. A lossy coding technique introduces distortion to the signal.Which component in the above video coding system is lossy?(b)The motion compensation process in the encoder generates a motion vectorand prediction errors for each image block in the video signal. Suppose duringthe transmission of the encoded video stream, one motion vector is lost (e.g.,due to the network erasure error). What will be the visual effects of suchtransmission errors on the decoded image sequence?4.Consider a black-and-white image consisting of round and rectangular objects, as shown in the image below. Assume the sizes of the objects are fixed and known. We also know that the width and length of the rectangles are larger than the diameter of the circles. None of the rectangles are tilted. In general, the objects may overlap with each other.Design a morphological operation based system to automatically detect all the instances of the rounds objects that overlap with rectangular objects.5. An image A, represented by an N × M array of bytes, has a uniform brightnesshistogram. It is desired transform A into an image B in a way that produces a triangular brightness histogram2550,36240][≤≤=k k MNk h bDescribe a process that will accomplish the transformation. If possible, derive an equation for the transformation function. At a minimum, sketch the transformation function and indicate how you would use it in a program to compute the array B.模拟试卷一1.对将一个像素宽度的8通路转换到4通路提出一种算法。
adaptivethreshold 偏移量 -回复

adaptivethreshold 偏移量-回复什么是adaptivethreshold 偏移量?Adaptivethreshold 偏移量(Adaptive Threshold Offset)是一种图像处理中常用的技术,用于将图像分割为二值图像。
图像分割是图像处理的基础步骤之一,它将图像中的目标和背景分离出来,使得图像更容易理解和处理。
在进行图像分割时,常常需要选择一个合适的阈值来确定目标和背景,而adaptivethreshold 偏移量就是用来计算这个阈值的。
为了更好地理解adaptivethreshold 偏移量的作用,首先需要了解adaptivethreshold 分割算法的工作原理。
这一算法是基于自适应阈值的分割方法,它可以根据图像中的像素灰度值的局部特性自动选择阈值,从而实现更好的分割效果。
adaptivethreshold 分割算法根据像素周围的邻域信息来确定每个像素的阈值,这使得它能够在受到光照和噪声等因素影响时仍能有效地进行图像分割。
具体而言,adaptivethreshold 偏移量是用来调整adaptivethreshold 算法中的阈值的。
adaptivethreshold 算法根据图像局部邻域的平均灰度值来计算阈值,而adaptivethreshold 偏移量可以对这个计算结果进行修正。
当我们在使用adaptivethreshold 算法进行图像分割时,可能会遇到一些特殊情况,例如图像中存在很强的光照差异或者噪声干扰较多。
这些情况下,adaptivethreshold 的计算结果可能会偏离我们期望的分割效果,因此我们需要根据实际情况调整阈值。
adaptivethreshold 偏移量可以通过增加或减少adaptivethreshold 算法中的阈值来实现。
当图像中存在较强光照差异时,我们可以增加偏移量来使得阈值增加,从而更好地适应光照变化。
而当图像中存在噪声干扰时,我们可以减少偏移量来使得阈值减小,从而更好地保留目标的细节信息。
METHOD OF ADAPTIVE INTERPOLATION FILTERING IN VIDE

专利名称:METHOD OF ADAPTIVE INTERPOLATION FILTERING IN VIDEO CODING发明人:CHEN, Ching-Yeh,HUANG, Yu-Wen申请号:EP15774443.4申请日:20150401公开号:EP3111643B1公开日:20190925专利内容由知识产权出版社提供摘要:A method and apparatus of adaptive interpolation filter for motion compensation with fractional-pixel accuracy are disclosed. Embodiments of the present invention generate interpolated reference samples at non-integer locations based on existing reference samples in a reference block by using an interpolation filter set adaptively according to pixel location and/or pixel characteristics. A current block is then encoded or decoded using a temporal predictor including the interpolated reference samples. The adaptive interpolation filter can be applied to the prediction unit (PU). In one embodiment, the interpolation filter set consists of interpolation filters having different filter lengths. An interpolation filter with a longer tap length is applied to generate interpolated reference samples farther from the block boundary and an interpolation filter with a shorter tap length is applied to generate interpolated reference samples closer to the block boundary.申请人:MediaTek Inc.代理机构:Habermann, Hruschka & Schnabel更多信息请下载全文后查看。
结合帧率变换与HEVC标准的新型视频压缩编码算法
结合帧率变换与HEVC标准的新型视频压缩编码算法武其达;何小海;林宏伟;陶青川;吴笛【摘要】相比于之前主流的H.264视频压缩编码标准,HEVC在保证重建视频质量相同的前提下,可以将码率降低近50%,节省了传输所需的带宽.即便如此,由于一些特定的网络带宽限制,为继续改善HEVC视频编码性能,进一步提升对视频的压缩效率仍然是当前研究的热点.本文提出一种HEVC标准编码与帧率变换方法相结合的新型的视频压缩编码算法,首先在编码端,提出一种自适应抽帧方法,降低原视频帧率,减少所需传输数据量,对低帧率视频进行编解码;在解码端,结合从HEVC传输码流中提取的运动信息以及针对HEVC编码特定的视频帧的分块模式信息等,对丢失帧运动信息进行估计;最后,通过本文提出的改进基于块覆盖双向运动补偿插帧方法对视频进行恢复重建.实验结果证实了本文所提算法的有效性.【期刊名称】《自动化学报》【年(卷),期】2018(044)009【总页数】11页(P1626-1636)【关键词】帧率变换;HEVC;自适应抽帧;块覆盖;运动补偿插帧【作者】武其达;何小海;林宏伟;陶青川;吴笛【作者单位】四川大学电子信息学院图像信息研究所成都 610065;四川大学电子信息学院图像信息研究所成都 610065;四川大学电子信息学院图像信息研究所成都 610065;四川大学电子信息学院图像信息研究所成都 610065;中国人民武装警察部队警官学院成都 610213【正文语种】中文随着高清数字电视(High definition television,HDTV)和高端多媒体系统的普及和发展,人们对于视频的主观享受需求也越来越高,这就对视频节目源的质量提出了更高的要求.节目源的质量越高,视频的数据量越大,传输所需的带宽也就越大,因为视频节目源的质量提高主要依赖视频的空间分辨率和时间分辨率两个方面.视频的空间分辨率指的是视频的横向行和纵向列的像素点的个数;视频的时间分辨率是单位时间内播放的视频的帧数,即视频的帧速率(Frame rate)二者的值越大则视频中的信息表达的越清晰,人们的观影效果也就越好.但传输的数据量也就越大.例如,一个视频序列每秒25帧,尺寸为720p(1280×720最低要求的高清晰度信号),在不压缩的情况下需要552.96Mbit/s.目前已经出现了4K(3840×2160)的电视信号以及8K(8192×4320)的超高清视频,这种视频源带来更好观影感受的同时,带来的是更大的数据量.新一代高效视频压缩标准(HEVC)与以前的H.264编码标准相比,在同等重建视频质量的前提下,已经节省了将近50%的码率,对于节省带宽资源做出了很大贡献.但是,实际的视频传输应用需求中,受到一些特殊的传输带宽限制,为了进一步提高视频压缩编码的效率和性能,本文提出一种结合帧率变换的视频压缩方法.帧率变换方法作为提高压缩率的技术,与HEVC标准编码相结合,在编码端降低视频的帧率,以减少编码帧数降低传输码流数据,然后在解码端插帧恢复成原帧率的视频[1].视频帧率转换(Frame rate conversion)技术分为帧率下采(Frame rate down conversion)和帧率上采(Frame rate upconversion)[2].帧率下采技术指降低原视频的帧率,即减少每秒播放的帧数,降低数据量,达到节约传输带宽的目的.传统的帧率上采技术分为:非运动补偿插帧和运动补偿插帧两种.非运动补偿插帧恢复过程中不考虑原视频中物体的运动信息,只是通过待插帧和当前帧两参考帧对应位置的像素值来恢复待插帧像素值,例如帧重复法和帧平均法.运动补偿插帧[3]则是考虑了场景中物体的运动过程,通过结合运动矢量信息和参考帧中像素值信息重建待插帧,该方法可以有效地降低帧重复法引入的抖动和帧平均法引入的模糊现象.由于这种运动补偿插帧技术已经被广泛应用于电视广播,所以也被称为基于运动补偿的帧率提升方法(Motion compensationframe rate up conversion,MC-FRUC)[4].Choi等专门提出了用于帧率上转换技术的双向运动补偿内插(Bidirectional motion compensated interpolation,BMCI)[5−6],根据插帧过程中使用的运动矢量信息的来源不同,运动补偿插帧分为两种,一类是基于像素域,即对解码后的视频重新进行运动估计,再用获得的运动矢量信息进行插帧重建,例如Kang等[7]提出将基于扩展块的运动估计算法用于帧率上转换技术,另外还提出一种多重运动估计算法[8],Hu等[9]提出的一种块大小可变的运动估计算法,Inseo等[10],通过一种自适应运动估计方法获取的运动矢量用于运动补偿插帧,Xu等[11]提出的则是一种结合运动分割及边缘细化的运动估计方法,Cao等[12]提出一种基于多参考帧及软决策的运动估计算法,还有一些文章中使用快速光流运动估计方法来代替基于块匹配的运动估计方法[13−14],也取得了一定的效果,另外孙琰玥等[15]提出了一种适用于视频超分辨率重建的基于小波变换的改进的自适应十字模式搜索算法.第二类是基于压缩域的,该种方法通过从编码后的码流中提取相邻帧的运动矢量信息,用于运动补偿插帧.例如Kim等[16]提出了一种低计算复杂度的帧率提升算法,引入了基于预测的运动矢量平滑以及基于局部平均的运动补偿方法,鲁志红等[17]提出一种基于加权运动估计和运动矢量分割的内插方法,其中加权运动估计可以改善运动矢量的准确度.与前者相比,第二种方法省去了对编码后视频重新运动估计以获取运动矢量的过程,大大减少了计算量,提高了时间效率.尽管运动补偿插帧方法效果明显优于非运动补偿插帧,但是,传统的运动补偿插帧方法插帧重建后的视频会有空洞和块效应,为解决上述问题,改善视频压缩编码的性能,本文提出一种结合帧率变换与HEVC标准的新型视频压缩编码算法.1 结合帧率变换与HEVC标准的新型视频压缩编码算法视频由一系列记录运动物体变化过程的图像组成,自然界中大部分物体的运动都是连续的,只是在不同的场景中,物体的运动方式有所不同,有的运动剧烈,有的运动缓慢.对于运动缓慢或者运动规律可循的物体,容易预测它的运动轨迹下一时刻的位置;相反,如果场景中物体的运动很剧烈,或存在场景变化等不规则运动,那么对于运动轨迹预测就会艰难.由此可见,视频压缩过程中运动信息对于视频重建至关重要.因此,本文对于运动信息的获取以及运动信息后处理提出了一种新方法.在标准的HEVC编码方法中,尽管采用了有损压缩[18]方法来提高压缩率,但为适应特殊带宽,往往通过抽帧方法来进一步提升压缩率.另一方面,由于HEVC没有对丢失帧部分的信息恢复作深入的研究,因此找到一种高效的视频插帧恢复方法对于提高压缩效率有很大的意义.因而,本文提出了一种结合帧率变换技术和HEVC标准的新型视频压缩编码算法.1.1 编码端自适应抽帧方法视频中物体的运动基本分为两类,一种是线性可预测的,例如水平或垂直平移滑动;另一种是不可预测的,例如场景中物体的消失或突现.由此可见,如果对不同的视频进行帧率下采时都采取相同的抽帧策略,则有可能对于视频的重建质量有影响,例如对于运动轨迹可预测的视频帧,其相邻的多帧都有类似的运动矢量信息,如果只是隔帧抽取则会造成传输带宽浪费;对于有场景跳变或物体运动规律不规则的视频,抽帧后会造成运动不可预测.由此可见,抽帧的方法与视频的重建质量紧密相关,为解决上述问题,提升帧率下采性能,本文提出一种自适应抽帧方法.对于视频中运动缓慢或序列场景没有发生跳变的帧,增大抽取的帧数,以达到进一步降低编码帧数,减少编码后传输数据量的目的,相反,对于运动剧烈或者存在场景跳变的视频序列,则不抽帧,这样可以保证视频插帧重建的质量.判断一帧是否为场景跳变帧,采用相邻帧的平均绝对误差(MSAD[19])和相对变化率(R)作为判断依据.其中,fi−1(i,j)表示前参考帧在位置(i,j)处的像素值,fi(i,j)表示当前参考帧在位置(i,j)处的像素值,m和n分别表示视频的宽度和高度,MSADi表示相邻两帧对应位置像素绝对误差的均值,R表示相邻帧场景的相对变化率.自适应抽帧具体方法为:当MSADi和R的值均大于给定的阈值,则判断第i帧为场景跳变帧,则对该帧进行保留,不进行抽帧处理;反之,则将该帧视为可抽弃帧,判断完一帧后,继续判断相邻下一帧是否为可抽弃帧,这样就存在一个问题,若连续的几帧都为可抽弃帧,则会造成抽弃帧数过多,对视频进行重建时,在获取的运动信息准确性有较大影响,导致视频重建质量不佳,因此,为了保证插帧重建视频的质量,本文对于相邻参考帧之间的最大抽帧数设置了一个阈值.通过实验比较,当设定相邻两参考帧间最大连续抽帧数阈值为2,MSADi阈值为35,R阈值为3时,效果较好.具体抽帧结果如图1所示.图1 自适应抽帧结果图Fig.1 The result of adaptive frame skip1.2 丢失帧运动估计在HEVC编解码标准中,运动估计是尤为重要的环节之一[20].由于相邻视频帧间存在时域相关性,将一帧图像分割成不同的块,再从相邻帧中找到每个块的对应位置的过程称为运动估计[21].在HEVC中运动估计过程如图2,假设时刻t为当前时刻帧,时刻t−Δt为后向参考帧,时刻t+Δt为前向参考帧,将当前帧中的块分别在参考帧中找到最佳匹配块,对应的运动估计过程分别为前向运动估计和后向运动估计,从而获得相应的运动矢量.图2 HEVC中的运动估计Fig.2 The motion estimation in HEVC在传统的帧率上采技术中,通过对低帧率视频的解码视频重新进行运动估计来获得运动矢量,用于帧率上采中的原帧率视频的重建,由于在HEVC编解码的过程中运动估计占用了大部分的时间,如果对解码后的视频重新进行运动估计,又会再次耗费大量的时间,这将达不到实时视频通信的要求.为了解决这一问题,本文中自适应抽帧后的视频经过HEVC编码,从编码后的传输码流中提取参考帧运动矢量信息,初步估算丢失帧的运动信息,用于双向运动补偿插帧,提高插帧恢复后视频的质量,这样可以节省用于重新运动估计的时间.由上所述,HEVC对低帧率视频进行编码的过程中,在帧间编码(INTER)模式下,通过运动估计获得相邻两编码帧的运动矢量(MV),即待插帧的前后两参考帧的相对运动矢量信息.本文在获取低帧率视频编码时相邻帧的运动矢量信息的过程中,例如图2中t时刻帧相对于t−Δt时刻帧的运动矢量信息,由于HEVC标准帧间编码模式下运动矢量信息是以预测块单元(PU)的方式存储的,而PU块是在编码块单元(CU)的基础上分割出来的,HEVC中CU块最大尺寸为64×64,因此在提取相邻帧运动矢量信息时,以64×64最大CU块为单位,分别提取出一帧中所有最大CU块的运动矢量信息,且本文对获取的最大CU块中的运动矢量以4×4块为最小单位,即在每个64×64块中分别有16行和16列的运动矢量,其中每个运动矢量表示该4×4块内16个像素点的运动矢量值,为了后续处理方便再将运动矢量分别对应到每个像素点,至此,t时刻帧中的每个像素位置就有了相对于t−Δt时刻帧的运动矢量信息(Vx,Vy),对于丢失帧而言,也就获得了前一参考帧对于后一参考帧的运动矢量,然后,将该运动矢量信息用于丢失帧运动信息的估计,丢失帧初始运动矢量估计及传统的双向运动补偿插帧[22]计算方法如下:其中,Ft(x,y)代表待插帧在位置(x,y)处的重建值,Ft−1和Ft+1分表表示前一帧和当前帧参考帧,(Vx,Vy)为码流中获得的待插帧的前参考帧(即前一时刻帧)相对于后参考帧(即后一时刻帧)的运动矢量,表示由参考帧运动矢量信息计算得到的待插帧相对于前后两参考帧的初始运动矢量.传统的双向运动补偿插帧如图3,图中MV表示从HEVC传输码流中获取的当前帧相对于前一帧的运动矢量,则待插帧初始运动信息由MV的一半代替,但由于这种方法简单,插帧后视频帧中会存在一些空洞和块效应,针对这个问题,本文提出一种基于帧内块运动信息填充的块覆盖双向运动补偿插帧方法.图3 双向运动补偿插帧Fig.3 Bidirectional motion compensated interpolation 1.3 基于帧内块运动信息填充的块覆盖双向运动补偿插帧方法由HEVC编码过程中特殊的分块模式,运动矢量信息以PU块的方式存储在码流信息中,即同一个PU块中的像素位置具有相同的运动矢量.对于低帧率视频编码过程,在IPPP帧间配置编码模式下,编码器会同时进行帧内预测和帧间预测来获取残差信息,尽管大部分编码块的预测模式为帧间预测,但若帧间预测获取的残差信息不够准确时,编码器将自动使用帧内预测获得的残差用于编码,如图4所示,在一参考帧编码图像中帧内块的分布情况,其中标记为白色标记的即为帧内编码块.从图4可以看出,虽然该参考帧中帧内编码块数量较少,但大多集中在纹理较复杂的区域,且在HEVC标准编码中若从码流信息中提取的参考帧块信息对应的是帧内编码块,则该块运动矢量为0,用于插帧的话就会引起空洞或块效应[23],所以,在进行插帧恢复之前,本文首先对参考帧中的这些帧内块运动信息进行估计.识别参考帧中的编码块是否为帧内块的具体方法如下:在HEVC编码过程中会记录下每一编码帧中的分块方式并传输到解码端用于解码,本文为获取参考帧中帧内块位置,判定哪些块是帧内编码块,在编码码流中提取参考帧运动信息的同时,也提取出每一参考帧的分块模式信息,从而确定了帧内块的位置,若当前编码块为帧间块则直接使用码流中提取的运动矢量对丢失帧进行运动估计,若为帧内块则首先对该帧内块运动矢量进行填充,再用于丢失帧相应块运动矢量估计,具体参考帧中帧内块运动矢量填充方式为其中,MVintra表示帧内块运动矢量估计值,MVprev表示待插帧的当前参考帧与前一参考帧中该帧内块相同位置处的运动矢量,MVback表示当前参考帧的后一参考帧中该帧内块相同位置处的运动矢量值,MVi表示与该帧内块相邻的块运动矢量,wi 表示补偿权重,n为相邻块的个数.图4 编码帧中帧内块位置分布Fig.4 The distribution of intra-block in coded frame对于补偿权重wi的设定规则是:通过从码流信息中提取的编码过程中每一参考帧的帧分块模式,得到参考帧中该帧内块相邻编码块的大小,若相邻块的大小与该帧内块相同则权重为1,否则,按照相邻块与帧内块的在HEVC中的划分深度的差值来确定,相差1,则权重为0.5,相差2,则权重为0.25,以此类推.如果相邻块中存在帧内块则不算在内,若周围全是帧内块,则该帧内块运动矢量设为0.通过上面的修正,使得参考帧中的每个帧内块有了运动矢量信息,继续对用于基于块覆盖的运动补偿插帧的运动矢量进行优化,在对待插帧中每个4×4块进行插值恢复之前,对其运动矢量进行如图5的平滑处理.具体计算方法为图5 运动矢量平滑Fig.5 Motion vector smoothing如图5所示,取该块的八个相邻块与自己本身运动矢量的平均值作为插帧恢复过程中的运动矢量,如果待插值的块位于边界区域,则取其边界内参考块的运动矢量进行参考,例如若此时需要插值图像右下角的块,则在参考帧中取其对应位置块,其左边块、上边块以及左上方三个块进行参考.其他角落的边界块插值以此类推.经过如上处理得到丢失帧的最终运动矢量.帧率变换技术是基于视频帧的时域相关性,因此可以如式(3)由相邻两参考帧的运动矢量估算出待插帧的运动信息,除此之外,视频序列中的每一帧内部还存在空域相关性,又由于HEVC中的大部分信息如运动矢量信息都是以不同PU块的格式存储和传输的,在丢失帧的重建过程中也是以块的像素值重建的方式完成的,在插帧的过程中按照待插帧中每行中的4×4块的方式进行插值,这样就存在一个问题:待插帧中的某个块可能会同时使用到参考帧中不同的参考块的信息,由图4中的参考帧分块信息可知,一帧中存在许多不同大小的块,且每个块有不同的MV,但对于丢失帧的插值块位置有可能覆盖了参考帧中的几个不同的编码块,这样就会造成插值块可能同时参考几个不同的运动矢量信息来进行插值重建,这就造成了重建帧中的块效应,为解决这个问题,根据从码流信息中提取的参考帧中不同的块分布,借用待插块在参考帧中相同位置空域相邻块的运动信息和像素值来共同重建待插块,所以在双向插帧的基础上,充分考虑视频帧中空域上的相关性,对待插值块分区域进行插值,对不同区域内的像素块覆盖位置采用不同的方法进行插值,即基于块覆盖的双向运动补偿插帧,可有效减少插帧过程中带来的块效应.本文提出的基于块覆盖运动补偿插值方法如图6所示.以图6中间实线所标注区域的待插块为例,可见待插块在参考帧中的相同位置的范围覆盖了参考帧编码图像中的4个编码块(图6中以虚线分割的块),以图6中A,B,C 三个不同覆盖区域块来说明具体插帧过程.A块由于覆盖相邻的四个具有不同运动信息的块,所以空域上要受到这四个块运动矢量的影响,因此本文对A块插帧方法为分别使用参考帧中所覆盖四个块的运动矢量信息及像素值来重建待插帧,再取平均,为最终A块的重建值.改进式(4)中的传统双向运动补偿插帧方法,对其进行重建如下:其中,表示A块的重建值,表示待插值A块相对于前后两个参考帧最终的运动矢量信息,因为A块覆盖了四个编码块,空域上受到这四个块的影响,所以i取值1~4分别对应于这四个相关块重建A块,最后取平均值就是重建出的A块像素值.同理B块受到两个相邻编码块运动信息的影响,C块只受一个块的运动信息的约束,对这两块的插值恢复过程如下:图6 块覆盖插值Fig.6 Block-covered interpolation1.4 插值重建视频帧滤波处理尽管视频中相邻帧间存在很高的时域相关性,但实际上相邻两帧中相同位置的像素值也不可能完全一样,帧率上采技术中插值恢复的帧和原始帧相比肯定存在失真,因此,对插帧恢复后的像素值进行滤波显得尤为重要.通过对插值恢复的视频帧进行滤波可以有效地降低处理过程中引入的噪声,并且可以对重建帧中存在的空洞和块效应起到平滑的作用.在一视频帧中,引入的噪声大多集中在代表图像细节纹理信息的高频部分,因此,选用的滤波方法应该在有效滤除掉噪声的同时,也要保留图像中的轮廓及边缘等重要信息;而一帧图像中大部分能量集中在低频部分,即图像的背景部分,往往插值重建帧中的空洞或者块效应也集中在这一部分,通过平滑滤波可以解决这一问题.一般的滤波方法包括均值滤波,中值滤波,双边滤波等,其中的均值滤以及高斯滤波可以对视频帧进行平滑,均值滤波具体的平滑方法如图7,其中(m,n)表示一帧中的像素位置,本文中使用了[1,1,1;1,8,1;1,1,1]的3×3模板作为插值恢复帧平滑滤波器,模板如图8.经实验比较,相比于其他[1,2,1;1,4,1;1,2,1]和[1,1,1;1,1,1;1,1,1]两个模板,第一个模板取得了更好的滤波效果. 图7 平滑滤波Fig.7 Smoothing filtering图8 平滑滤波模板Fig.8 The template of smoothing filter1.5 本文算法具体流程综上所述,本文算法的主要思想是结合帧率变换技术的HEVC编码改进算法,在编码端进行自适应抽帧,在解码端,改进了基于块覆盖的双向运动补偿插帧方法,进行插帧恢复,并通过滤波方法来提高插值重建帧质量.流程图如图9所示,具体算法实现过程如下:步骤1.在编码端将待编码视频序列进行自适应抽帧;步骤2.编码抽帧后的序列,传到解码端,并在解码端接收到的码流信息中提取运动信息和帧内分块信息;步骤3.通过码流信息得到的运动矢量信息初步确定丢失帧的运动信息;步骤4.通过获取的分块信息,对参考帧图像中的帧内编码块进行运动矢量估计,保证每一个块都有合适自己的运动矢量;步骤5.运动矢量平滑处理,使用基于块覆盖的双向运动补偿插帧方法对待插帧进行插值恢复;步骤6.对重建帧进行滤波处理,以减少插帧中出现空洞和块效应.2 实验结果及分析为了验证上文所提算法的有效性,实验部分将本文提出的算法和标准的HEVC编解码过程实验结果进行对比.实验平台采用CPU为Intel Core i5 3470 3.2GHz及内存为4GB的PC.本文在对低帧率视频和原视频的HEVC编码过程中,标准HEVC视频编解码器版本为HM16.0,配置文件都使用了encoder_low delay_P_main,选取了不同分辨率的视频序列的前100帧,在量化参数QP分别选取了22,27,32,37,42的情况下进行测试.由于视频序列的多样性,如本文算法实验结果显示,虽然对于所选用类型的测试序列均有正向效果,但不代表本文算法适用于所有标准视频.具体实验结果如下:由于本文提出的是一种结合帧率变换和HEVC标准的新型视频压缩编码算法,最终目的是在视频编码标准HEVC的基础上降低码率,因此实验首先给出的对比结果为本文算法与HEVC标准的对比,进一步证明算法有效性.表1是5个不同分辨率的标准YUV视频序列在不同量化参数下,经过HEVC标准和本文中结合帧率变换的编码方法编码码率和重建视频峰值信噪比(Peak signal to noise ratio,PSNR)的对比. 由表1结果可见,对于不同分辨率的视频序列,相比于HEVC标准视频编码方法,在不同量化参数下,本文算法可以节省一定的码率,并且随着QP的逐渐增大,PSNR的差。
基于自适应时频峰值滤波的光纤陀螺去噪算法

基于自适应时频峰值滤波的光纤陀螺去噪算法顾姗姗;刘建业;曾庆化;陈维娜;陈磊江【摘要】An algorithm based on adaptive time-frequency peakfiltering(ATFPF) for fiber optical gyro(FOG) is proposed to reduce the noise of FOG and improve the precision of the inertial navigation system. With the presented algorithm, the FOG signal is transformed and modulated, and then time frequency analysis of the modulated signal is made by pseudo Wigner-Ville distribution(PWVD). A rule for the optimal window length selection of adaptive PWVD is given, and the instantaneous frequency of the coded signal is estimated by local peak search. In this way, the useful signal is restored and the noise of FOG is reduced. Simulation and real data are processed by discrete wavelet transform(DWT) and ATFPF algorithms separately, and the results show that proposed algorithm can reduce the noise of FOG effectively, and the improvement of SNR is 1~3 dB. The signal denoised by ATFPF can effectively track the initial signal, especially for the high dynamic signal.%为减小光纤陀螺输出信号噪声、提高惯导系统精度,提出了光纤陀螺信号自适应时频峰值滤波算法。
av1编码原理

av1编码原理AV1 是一种由 Alliance for Open Media (AOMedia) 开发的开放式、免费的视频编码标准。
它旨在提供更高的视频压缩率,以及更好的视频质量,同时保持开放、免费和无专利费的特性。
AV1编码技术采用了多种先进的技术,包括变换、预测、运动补偿、内容自适应、熵编码等,下面将详细介绍AV1编码原理。
1. 变换在视频编码中,变换技术被广泛应用于对视频帧进行频域变换。
AV1采用了一种名为Discrete Cosine Transform (DCT) 的变换技术,用于将视频帧从空域变换到频域。
这样做的目的是为了去除视频帧中的冗余信息,从而实现更高的压缩率。
AV1还采用了一种名为二维-DCT的变换技术,来对视频帧的每个块进行变换,以进一步提高压缩率。
2. 预测预测技术是视频编码中非常重要的一部分,它通过对视频帧中的像素值进行预测,来减小需要编码的信息量。
AV1采用了一种名为Intra Prediction的预测技术,用于在视频帧内部进行像素值的预测。
此外,AV1还采用了一种名为Inter Prediction的预测技术,用于在视频帧之间进行像素值的预测。
这些预测技术可以有效地减小视频帧的信息量,从而提高压缩率。
3. 运动补偿运动补偿是视频编码中用于处理视频帧中运动信息的一种技术。
AV1采用了一种名为Global Motion Compensated Prediction的运动补偿技术,用于对视频帧进行全局的运动补偿。
此外,AV1还采用了一种名为Local Motion Compensated Prediction的运动补偿技术,用于对视频帧进行局部的运动补偿。
这些运动补偿技术可以有效地减小视频帧的信息量,从而提高压缩率。
4. 内容自适应内容自适应是视频编码中用于根据视频内容的复杂性来调整编码参数的一种技术。
AV1采用了一种名为Content Adaptive Encoding的内容自适应技术,用于根据视频内容的复杂性来调整变换、预测、运动补偿等各个模块的编码参数。