无人机航高计算表2
飞马无人机管家-智航线 航线规划说明书

飞马无人机管家-智航线航线规划C O N T E N T S目录01安装无人机管家02航线规划03工程管理01安装无人机管家1、软件下载打开深圳飞马机器人科技有限公司官网https:///zhcn管家数据处理最低配置要求2.注册登录说明:无人机管家专业版、微信“飞马助手”小程序、起司网账号通用02航线规划1、新建工程进入智航线中,选择新建工程,并输入工程名称(如时间、地点、项目名称)(无人机管家支持全中文命名)新建工程搜索工程复制工程删除工程网络状态高程服务器状态打开工程保存指北针搜索选择工具添加顶点绘制类型导入生成航线测区列表导出注记点导出拷贝删除禁飞区测距工具注记点测区居中地图切换鼠标所在位置坐标2、查找测区位置进入工程后,选择查找功能,找到测区所在地,有如下几种方法:I.直接放大地图查找II.输入经纬度查找(单位:度)III.按照省份、地市、名称查找IV.导入KML文件(KMZ可通过谷歌转换后导入)3、新建多边形测区找到测区位置后,选择绘制类型-多边形,绘制航飞区域,双击结束绘制。
➢拖拽可以移动每个航点➢移动工具可以移动整个测区➢双击测区内部可以更改测区名称,了解测区面积➢双击航点可以得到航点坐标,删除航点➢使用添加顶点工具,可以添加顶点4、新建条带测区找到测区位置后,选择绘制类型-条带,绘制航飞线路,双击结束绘制。
➢拖拽可以移动每个航点➢移动工具可以移动整个条带➢双击测区内部可以更改测区名称,了解测区长度和带宽➢双击航点可以得到航点坐标,删除航点➢使用添加顶点工具,可以添加顶点5、区块拆分依据不同机型的测控半径,对用户绘制的较大范围的测区区块进行拆分,保证飞机安全,方便用户作业。
注:倾斜相机针对【四个点多边形】或者【矩形】不拆分区块,四点多边形提示变成矩形(也可加点变多边形);非【四个点多边形】或者【矩形】区域正常分块。
带状区域不作区块拆分(D1000按照2km距离拆分)5、区块拆分-逻辑机型载荷块状区块拆分边长F1000/2000/200/300P40除外8km V1000/100/200/300all 8kmD200/200s/300/300L五相机除外D1000allD2000五相机除外块状区块拆分机型载荷条带区块拆分边长D1000all 其他-不拆分机型载荷块状区块拆分边长F1000/2000/100/200/300P300All 按续航里程拆分V1000/100/200/300All 不拆分D200/200s/300/300L五相机按续航里程80km 拆分D1000-不拆分D2000五相机按续航里程80km 拆分机型载荷条带区块任务拆分边长F1000/2000/100/200/300P300all按续航里程V1000/100/200/300all 1-25km 可调D200/200s/300/300Lall D2000all Inspire2/Mavic2Pro all 不拆分Phantom4Pro-不拆分条带区块拆分块状任务拆分条带任务拆分D2000/D200条带任务拆分计划改为1-10km 可调在有网络的条件下(高程服务器图标亮),选中要生成航线的测区,使用生成航线功能,选择对应的机型和载荷,自动生成航线,点击右上角保存。
无人机数据采集
主要内容
4 航摄成果质量检验
4.1 像片重叠度
• 将相邻两张像片按其中心附近2cm范围旳地物重
叠后,再将重叠百分尺旳末端置于第二张像片旳
边沿,读取第一张像片边沿在重叠百分尺上旳分 划值,此值即为像片旳航向重叠度。
S
S2
1
1)航向重叠度
qx
Px Lx
Px Lx
2)旁向重叠度
qy
Py Ly
4 航摄成果质量检验
1 无人机遥感旳缺陷
1.3 影像数量多 • 像幅小,像片多,影响处理效率,需要更多旳控
制
• 举例:对6km2 方某地进行航拍, ① 无人机平台装载Cannon 450D相机、
全部相片数达1200张 ① 老式航测平台使用DMC相机
全部相片不超出300张
1 无人机遥感旳缺陷
1.4 抗风能力差, 稳定性差
• 飞行前布控,能够提升精度。圆形点较优 • 飞行后布控,平面内旳标志点较优
3.1 工作准备
3.1.5 控制点布设及测量
3.1 工作准备
3.1.5 控制点布设及测量
3.2 航空摄影
3.2.1 摄影季节和航摄时间旳选择
• 航摄季节应选择本摄区最有利旳气象条件,并要尽量旳防 止或降低地表植被和其他覆盖物对摄影和测图旳不良影响, 确保航摄像片能够真实地显现地面细部。
航向重叠 89.1
86.3
80.1
75.3
70.0
65.1
度(%)
自动匹配 940
770
645
510
440
348
点数
中误差 0.1
0.2
0.3
0.4
0.6
0.8
(pixel)
如何增加无人机的飞行时间和升力?
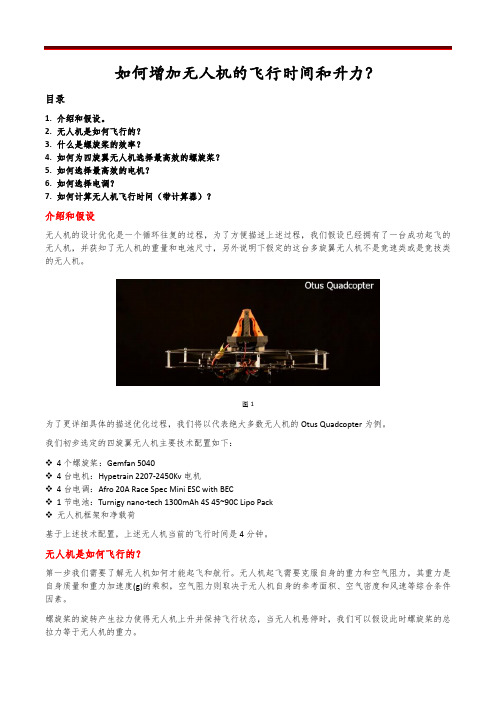
如何增加无人机的飞行时间和升力?目录1.介绍和假设。
2.无人机是如何飞行的?3.什么是螺旋桨的效率?4.如何为四旋翼无人机选择最高效的螺旋桨?5.如何选择最高效的电机?6.如何选择电调?7.如何计算无人机飞行时间(带计算器)?介绍和假设无人机的设计优化是一个循环往复的过程,为了方便描述上述过程,我们假设已经拥有了一台成功起飞的无人机,并获知了无人机的重量和电池尺寸,另外说明下假定的这台多旋翼无人机不是竞速类或是竞技类的无人机。
图1为了更详细具体的描述优化过程,我们将以代表绝大多数无人机的Otus Quadcopter为例。
我们初步选定的四旋翼无人机主要技术配置如下:❖4个螺旋桨:Gemfan 5040❖4台电机:Hypetrain 2207-2450Kv电机❖4台电调:Afro 20A Race Spec Mini ESC with BEC❖1节电池:Turnigy nano-tech 1300mAh 4S 45~90C Lipo Pack❖无人机框架和净载荷基于上述技术配置,上述无人机当前的飞行时间是4分钟。
无人机是如何飞行的?第一步我们需要了解无人机如何才能起飞和航行。
无人机起飞需要克服自身的重力和空气阻力,其重力是自身质量和重力加速度(g)的乘积,空气阻力则取决于无人机自身的参考面积、空气密度和风速等综合条件因素。
螺旋桨的旋转产生拉力使得无人机上升并保持飞行状态,当无人机悬停时,我们可以假设此时螺旋桨的总拉力等于无人机的重力。
依据上述假设和无人机总重量,如果要保持无人机的悬停状态,我们可以计算出每个螺旋浆需要提供的拉力。
已知无人机的质量是777g,因此我们需要7.6N的总拉力,即单个螺旋桨为1.9N。
图2:无人机重量和悬停拉力要求为确保无人机有更好的操控性,理论上螺旋桨提供的最大拉力应至少为悬停时拉力的两倍左右。
以上建议仅供参考,因为竞速类四旋翼无人机会要求有更高的推重比。
我们开始选择具有最高效率的螺旋桨,可以提供1.9N的拉力,最大尺寸6英寸,可提供最大3.8N的峰值拉力。
固定翼无人机技术-飞机基本飞行性能

动压限制
动压限制(qmax)属于飞机结构强度和刚度限制。过大的动压,可能会使机体受 到过大的空气动力作用,从而引起蒙皮铆钉松动,过大的变形甚至引起结构破坏。
由于中、低空飞行时,空气密度较大,表速较大,动压比较容易超出规定的数值 。因此,动压限制对飞行员来说就是最大允许表速限制。
温度限制
在环境温度一定的情况下,机体表面的气流滞止温度仅由Ma决定。因此温度限制 在飞机包线上往往以Malim给出。
2.已知某飞机以500 km/h的速度平飞,升阻比为1.2,飞行质量为6960 kg,可用推力 为68600 N,试问:
(1)平飞所需推力是多少?
(2)当发动机推力为可用推力时,若飞机以500 km/h的速度等速上升,上升角是多少? 上升率又是多少?
(3)发动机推力为可用推力时,飞机平飞加速度是多少?
感 谢 聆听
TR D CD 1 G L CL K
TR
G K
CD CD0 CDi CDh
平飞所需推力
CD0为零升阻力系数,一般是飞行Ma的函数(见图);CD i为诱导阻力系数。一般 在迎角较小时(CL≤0.3),CD i=ACL2,诱导阻力系数因子A为Ma的函数;当迎角较 大(CL>0.3)时,CD i除随Ma而变外,还是迎角(即CL)的复杂函数,在某些飞机说 明书中以诱导阻力曲线的形式给出(见图)。ΔCD h是考虑到不同高度的雷诺数影响 系数
最大上升率曲线及静升限的确定
升限(ceiling)通常是指静升限(absolute ceiling),也叫理论升限,是飞机 能保持等速直线水平飞行的最大高度,也就是最大上升率为零的高度。
实用升限(service ceiling)应是:在给定飞行重量和发动机工作状态(最大加 力、最大或额定状态)下,在垂直平面内作等速爬升时,对于亚声速飞行,最大上升 率为0.5m/s时的飞行高度;对于超声速飞行,最大上升率为5 m/s时的飞行高度。
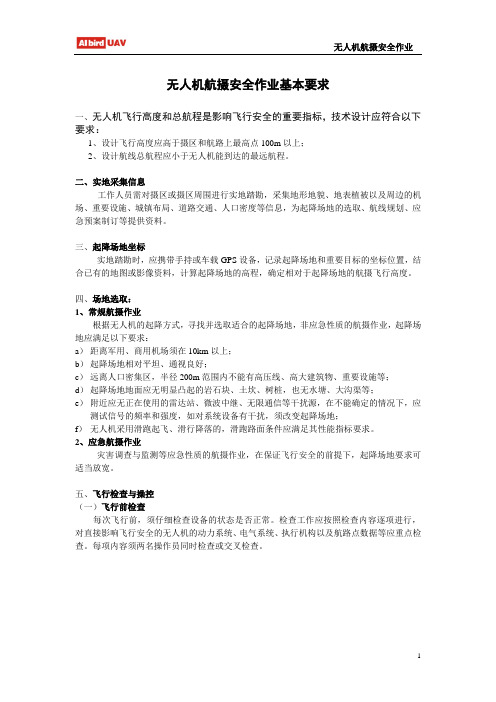
无人机航摄安全作业基本要求
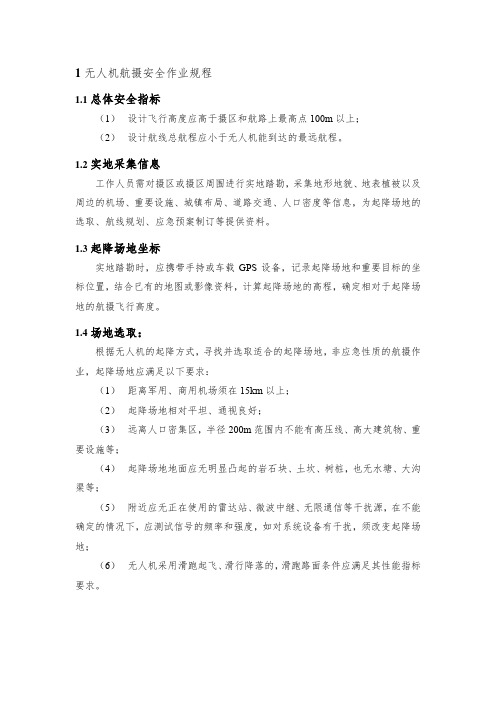
1无人机航摄安全作业规程1.1总体安全指标(1)设计飞行高度应高于摄区和航路上最高点100m以上;(2)设计航线总航程应小于无人机能到达的最远航程。
1.2实地采集信息工作人员需对摄区或摄区周围进行实地踏勘,采集地形地貌、地表植被以及周边的机场、重要设施、城镇布局、道路交通、人口密度等信息,为起降场地的选取、航线规划、应急预案制订等提供资料。
1.3起降场地坐标实地踏勘时,应携带手持或车载GPS设备,记录起降场地和重要目标的坐标位置,结合已有的地图或影像资料,计算起降场地的高程,确定相对于起降场地的航摄飞行高度。
1.4场地选取:根据无人机的起降方式,寻找并选取适合的起降场地,非应急性质的航摄作业,起降场地应满足以下要求:(1)距离军用、商用机场须在15km以上;(2)起降场地相对平坦、通视良好;(3)远离人口密集区,半径200m范围内不能有高压线、高大建筑物、重要设施等;(4)起降场地地面应无明显凸起的岩石块、土坎、树桩,也无水塘、大沟渠等;(5)附近应无正在使用的雷达站、微波中继、无限通信等干扰源,在不能确定的情况下,应测试信号的频率和强度,如对系统设备有干扰,须改变起降场地;(6)无人机采用滑跑起飞、滑行降落的,滑跑路面条件应满足其性能指标要求。
1.5飞行检查与操控1.5.1飞行前检查每次飞行前,须仔细检查设备的状态是否正常。
检查工作应按照检查内容逐项进行,对直接影响飞行安全的无人机的动力系统、电气系统、执行机构以及航路点数据等应重点检查。
每项内容须两名操作员同时检查或交叉检查。
1.5.1.1设备使用记录记录使用设备的型号和编号(见表1),用于设备使用时间的统计、故障的查找和分析。
表1设备使用记录表1.5.1.2地面监控站设备检查检查地面监控站设备并记录检查结果(见表2),存在问题的应注明。
表2地面监控站设备检查项目1.5.1.3任务设备检查检查任务设备并记录检查结果(见表3),存在问题的须注明。
基于精灵4 RTK无人机的1∶500地形图免像控测量

第23卷第1期2021年3月测绘技术装备Geomatics Techgoloyy and EquipmentVoi.23No.1Mae.2021基于精灵4RTK无人机的1:500地形图免像控测量倪凯(测,350108)1:500Topographic Mapping with Free Imaac Contrvi Basee on Phantom4RTK UAVN Kai摘要:为了验证精灵4RTK无人机在9570地形图测图中免像控测量的可行性,在分析航测法成图精度影响因素的基础上,选取实际生产项目,通过提高定位定姿系统(POS)数据精度和像机检校精度进行测试,结果表明,在满足一定条件情况下,精灵4RTK无人机用于9570地形图测图免像控测量是可行的。
关键词:航测法测图;免像控测量;POS数据;像机参数;无人机Keywords:Suneying;Sunee Wth Free Imaye Control;POS Data;Camera Parameters;UAV 中图法分类号:P231.21引言随着无人机航空摄影技术越来越广泛地应用于测绘行业,相关配套软硬件技术逐步得以提升,推动了无人机航空摄影技术快速革新,如卫星导航定位实时差分定位技术(RTK)、载波相位事后差分定位技术(PPK)、TimeSync时间同步系统以及高性能成像系统等,解决了无人机航空摄影时GNSS定位精度.GNSS曝光延迟和成像质量的问题,整体上提高了航测精度、质量和效率[]。
精灵4RTK是一款小型多旋翼高精度航测无人机,配备了高精度航测需要的RTK、PPK,Time-/丫^系统及2000万个像素高清镜头。
本文依据航测法成图原理对无人机航空摄影测量免像控关键技术进行分析,并以精灵4RTK无人机获取的实际数据为基础进行测试,分析基于精灵4RTK无人机进行9500地形图测图免像控测量的可行性。
2免像控测量关键技术分析无论是传统摄影测量还是数字摄影测量,其核心原理都是共线方程,即通过传感器记录影像数据曝光瞬间的对应关系,建立地面点、摄影中心点和像点三点共线方程。
无人机测绘大比例尺地形图实例研究

引起的不同形变如图 3 所示。
镜头畸变的校正步骤如下。第一步,构建一个室内或者
室外的控制区域,在该区域内布设多个空间坐标数据已知的
高精度标志点。第二步,针对需要进行校正的相机,拍摄控
制区域内的标志点,并提取标志点在相片中的像点坐标。第
三步,按照共线方程和将无误差的理想坐标代入畸变模型函数中,计算校正
(5)
式中 :x0,y0 为图像中心点坐标 ;x,y 为像点量测坐标 ;∆x 为像点横坐标的修正系数 ;∆y 为像点纵坐标的修正系数 ;α 为正方形结构以外的比例因子 ;β 为不具备正交性条件的畸 变系数 ;r 为像点的向径 ;k1 和 k2 均为径向畸变系数 ;p1 和 p2 均为切向畸变系数。
4 空中三角测量
系数,如公式(3)~公式(5)所示。 ∆x=(x-x0)(k1r2+k2r4)+p1[r2+2(x-x0)2]+p2(x-x0)(y-y0)+α(x-
x0)+β(y-y0) ∆y=(y-y0)(k1r2+k2r4)+p2[r2+2(y-y0)2]+p1(x-x0)(y-y0)
(3) (4)
r = (x − x0 )2 +( y − y0 )2
制无人机测绘大比例尺地形图。新的方法可以有效提高地形图精度,将该方法应用于实际工作,可以为各种地理
研究和决策提供重要的参考。
关键词 :无人机 ;航摄 ;系统 ;测绘 ;大比例尺 ;地形图
中图分类号 :P 231
文献标志码 :A
随着科技的不断发展,无人机技术已经得到了广泛应 用。无人机具有高效、灵活的特点,可以快速获取大量高精 度的数据,包括地形信息、建筑物信息等,为城市规划、土 地资源调查和环境保护等领域提供了重要的技术支持 [1]。其 中,无人机测绘大比例地形图的研究和应用是无人机技术发 展的重要方向之一。无人机技术迅速发展,无人机的性能不 断提升,应用范围不断扩大 [2]。无人机的用途已经从最初的 军事领域扩展到了民用领域,广泛应用于航拍、农业和测绘 等领域。在测绘领域中,无人机具有精度高、效率高和成本 低等优势,可以快速获取大量地形信息,为地形图测绘提供 了新的技术手段。
无人机地面站角度计算公式__解释说明以及概述
无人机地面站角度计算公式解释说明以及概述1. 引言1.1 概述本文旨在介绍无人机地面站角度计算公式,并解释其应用和意义。
无人机在现代社会发挥着越来越重要的作用,但是为了实现更精确的飞行控制和导航,需要准确测量无人机与地面站之间的角度。
因此,我们将介绍一种可靠的角度计算公式,以满足这一需求。
1.2 文章结构文章分为五个部分:引言、正文、计算公式解释说明、无人机地面站角度计算公式的应用和结论。
在正文部分,我们将对无人机和地面站之间的关系进行详细介绍,并探讨为什么需要准确测量它们之间的角度。
接下来,在计算公式解释说明部分,我们将逐步解释该公式的构成和原理,并提供示例来帮助读者理解如何使用它。
然后,在无人机地面站角度计算公式的应用部分,我们将具体说明该计算公式如何在实践中得到有效运用,并针对一些常见场景进行案例分析。
最后,在结论中,我们将总结本文所涉及的主要观点,并强调无人机地面站角度计算公式的重要性和实用性。
1.3 目的本文的目的是向读者介绍无人机地面站角度计算公式,帮助他们理解如何精确测量无人机与地面站之间的角度。
通过详细解释该计算公式的构成和原理,并提供实际应用案例,我们希望能够使读者更好地理解该计算公式,并在实践中有效运用。
最终,我们期望读者能够准确测量无人机与地面站之间的角度,为无人机飞行控制和导航提供准确可靠的数据支持。
2. 正文:在无人机系统中,地面站角度计算是一项关键任务。
地面站角度指的是无人机与地面站之间的方向角度,用于确定无人机相对于地面站的朝向。
为了准确计算无人机地面站角度,我们需要考虑以下几个因素:1. 基本坐标系:首先,我们需要建立一个基本坐标系来描述地面站和无人机的位置关系。
通常情况下,我们可以选择以地面站为原点建立直角坐标系,其中X轴指向东方,Y轴指向北方,Z轴垂直于水平地面向上。
这样就可以方便地计算无人机相对于地面站的方向角度。
2. 传感器数据获取:为了accurate measure the attitude of the drone with respect to the ground station, we need to utilize different sensors such as accelerometer, gyroscope, magnetometer, and GPS (Global Positioning System). These sensors provide information about the inclination, angular velocity, magnetic field strength and position of the drone respectively.3. 数据处理方法:接下来,我们需要通过数据处理方法将传感器获取到的原始数据转换为可用的角度信息。
无人机自主规划

附件二:数字地图.
二 模型假设
1)提供雷达威胁的坐标方位表和数字地图真实有效,并在短期内不会改变.
2)假定无人机的活动范围为20km×20km的区域.
问题一的模型假设:
1)忽略地形和无人机操作性能,无人机可以任意角度转弯;
2)不考虑气候以及飞机自身对飞行的影响;
3)飞机燃油量和飞行距离成正比;
本文着重于考虑雷达的威胁,所以取值为0.8.当然,这里可以根据设计者的不同要求取不同的 值 ,因而得到的线路有可能不相同.
5.2问题二
5.2.1建立模型
首先利用MATLAB编程(程序见附录三)画出地形和雷达威胁点的三维图如下:
在已知的威胁条件下,模型扩展到三维空间,并同时考虑无人机的操作性能(主要考虑拐弯)和地形因素.建立如下的规划模型[3]:
那么综合威胁可用下式表示:
1. 首先利用VB编程算出每条边的距离 如下表格:
对距离做归一化处理,这里采用高优公式:
其中, 为所有边的最大距离.
2. 计算雷达威胁代价
1)为了简化计算(见参考资料),我们把每条边均匀地分成6等份,取其中的三个点的威胁代价来代替整条边的威胁代价,这三个点分别是L/6,L/2,5L/6,L是第i边的长度,这样第i条边的雷达威胁代价为:
对于无人飞机的航迹优化问题,这里基于Voronoi对威胁网络的划分,采用图论算法实现无人机的航迹规化.
首先,通过Voronoi画出威胁网络图,在威胁网络图中,这里把每个威胁源的中心当作一个点来处理.威胁网络图如下:
那么,本文就在这个有限的二维Voronoi威胁网络图上分析无人飞机的航迹规化问题.
其中, 表示雷达j分别到第i边的三个分点的距离
无人机航空摄影测量技术规范-2023标准

无人机航空摄影测量技术规范1范围本文件规定了无人机航空摄影测量的基本规定、航摄作业、外业测绘、内业处理与成图等内容。
本文件适用于无人机航空摄影测量。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T79301:5001:10001:2000地形图航空摄影测量内业规范GB/T79311:5001:10001:2000地形图航空摄影测量外业规范GB/T20257.1国家基本比例尺地图图式第1部分:1:5001:10001:2000地形图图式GB/T23236数字航空摄影测量空中三角测量规范CH/T9008.1基础地理信息数字成果1:5001:10001:2000数字线划图CH/T9008.2基础地理信息数字成果1:5001:10001:2000数字高程模型CH/T9008.3基础地理信息数字成果1:5001:10001:2000数字正射影像图3术语和定义下列术语和定义适用于本文件。
3.1无人机unmanned air vehicle(UAV)由动力驱动、机上无人驾驶、可重复使用的航空器,具有遥控、半自主、自主三种飞行控制方式3.2无人机航空摄影aerial photography of UAV以无人机为飞行平台,以影像传感器为任务设备进行的航空摄影。
4基本规定4.1航摄作业前应收集与测区有关的地形图、影像等资料和数据,了解测区的地形地貌、气候条件,进行分析研究,确定飞行区域的空域条件、设备的适应性,制定详细的项目实施方案。
4.2航摄作业前应进行测绘备案登记。
4.3航摄作业前应遵循相关空域管理规定,获得有关空域管理部门的飞行批复文件。
4.4所配置无人机的航程、飞行高度、飞行速度等性能应能满足摄影任务的要求。
4.5无人机应配置必要的航空电子设备和传感器,如全球定位系统(GPS)、惯性导航系统(INS)、航空摄影测量设备等。
无人机导航控制算法

无人机多余度航空电子系统设计与应用
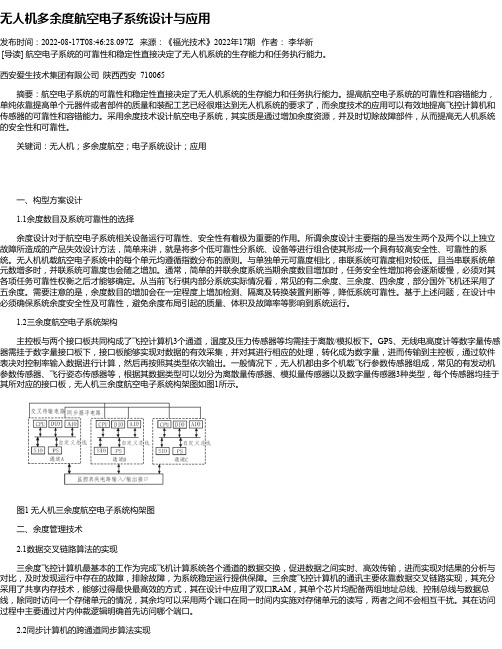
无人机多余度航空电子系统设计与应用发布时间:2022-08-17T08:46:28.097Z 来源:《福光技术》2022年17期作者:李华新[导读] 航空电子系统的可靠性和稳定性直接决定了无人机系统的生存能力和任务执行能力。
西安爱生技术集团有限公司陕西西安 710065摘要:航空电子系统的可靠性和稳定性直接决定了无人机系统的生存能力和任务执行能力。
提高航空电子系统的可靠性和容错能力,单纯依靠提高单个元器件或者部件的质量和装配工艺已经很难达到无人机系统的要求了,而余度技术的应用可以有效地提高飞控计算机和传感器的可靠性和容错能力。
采用余度技术设计航空电子系统,其实质是通过增加余度资源,并及时切除故障部件,从而提高无人机系统的安全性和可靠性。
关键词:无人机;多余度航空;电子系统设计;应用一、构型方案设计1.1余度数目及系统可靠性的选择余度设计对于航空电子系统相关设备运行可靠性、安全性有着极为重要的作用。
所谓余度设计主要指的是当发生两个及两个以上独立故障所造成的产品失效设计方法,简单来讲,就是将多个低可靠性分系统、设备等进行组合使其形成一个具有较高安全性、可靠性的系统。
无人机机载航空电子系统中的每个单元均遵循指数分布的原则。
与单独单元可靠度相比,串联系统可靠度相对较低。
且当串联系统单元数增多时,并联系统可靠度也会随之增加。
通常,简单的并联余度系统当期余度数目增加时,任务安全性增加将会逐渐缓慢,必须对其各项任务可靠性权衡之后才能够确定。
从当前飞行棋内部分系统实际情况看,常见的有二余度、三余度、四余度,部分国外飞机还采用了五余度。
需要注意的是,余度数目的增加会在一定程度上增加检测、隔离及转换装置判断等,降低系统可靠性。
基于上述问题,在设计中必须确保系统余度安全性及可靠性,避免余度布局引起的质量、体积及故障率等影响到系统运行。
1.2三余度航空电子系统架构主控板与两个接口板共同构成了飞控计算机3个通道,温度及压力传感器等均需挂于离散/模拟板下。
无人机航摄安全作业基本要求
无人机航摄安全作业基本要求一、无人机飞行高度和总航程是影响飞行安全的重要指标,技术设计应符合以下要求:1、设计飞行高度应高于摄区和航路上最高点100m以上;2、设计航线总航程应小于无人机能到达的最远航程。
二、实地采集信息工作人员需对摄区或摄区周围进行实地踏勘,采集地形地貌、地表植被以及周边的机场、重要设施、城镇布局、道路交通、人口密度等信息,为起降场地的选取、航线规划、应急预案制订等提供资料。
三、起降场地坐标实地踏勘时,应携带手持或车载GPS设备,记录起降场地和重要目标的坐标位置,结合已有的地图或影像资料,计算起降场地的高程,确定相对于起降场地的航摄飞行高度。
四、场地选取:1、常规航摄作业根据无人机的起降方式,寻找并选取适合的起降场地,非应急性质的航摄作业,起降场地应满足以下要求:a)距离军用、商用机场须在10km以上;b)起降场地相对平坦、通视良好;c)远离人口密集区,半径200m范围内不能有高压线、高大建筑物、重要设施等;d)起降场地地面应无明显凸起的岩石块、土坎、树桩,也无水塘、大沟渠等;e)附近应无正在使用的雷达站、微波中继、无限通信等干扰源,在不能确定的情况下,应测试信号的频率和强度,如对系统设备有干扰,须改变起降场地;f)无人机采用滑跑起飞、滑行降落的,滑跑路面条件应满足其性能指标要求。
2、应急航摄作业灾害调查与监测等应急性质的航摄作业,在保证飞行安全的前提下,起降场地要求可适当放宽。
五、飞行检查与操控(一)飞行前检查每次飞行前,须仔细检查设备的状态是否正常。
检查工作应按照检查内容逐项进行,对直接影响飞行安全的无人机的动力系统、电气系统、执行机构以及航路点数据等应重点检查。
每项内容须两名操作员同时检查或交叉检查。
1、设备使用记录记录使用设备的型号和编号(见表1),用于设备使用时间的统计、故障的查找和分析。
2、地面监控站设备检查检查地面监控站设备并记录检查结果(见表2),存在问题的应注明。
无人机航测技术方案
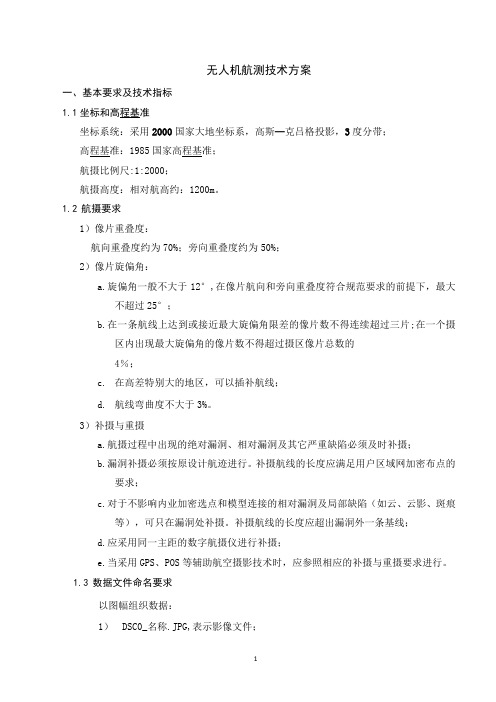
无人机航测技术方案一、基本要求及技术指标1.1坐标和高程基准坐标系统:采用2000国家大地坐标系,高斯—克吕格投影,3度分带;高程基准:1985国家高程基准;航摄比例尺:1:2000;航摄高度:相对航高约:1200m。
1.2航摄要求1)像片重叠度:航向重叠度约为70%;旁向重叠度约为50%;2)像片旋偏角:a.旋偏角一般不大于12°,在像片航向和旁向重叠度符合规范要求的前提下,最大不超过25°;b.在一条航线上达到或接近最大旋偏角限差的像片数不得连续超过三片;在一个摄区内出现最大旋偏角的像片数不得超过摄区像片总数的4%;c.在高差特别大的地区,可以插补航线;d.航线弯曲度不大于3%。
3)补摄与重摄a.航摄过程中出现的绝对漏洞、相对漏洞及其它严重缺陷必须及时补摄;b.漏洞补摄必须按原设计航迹进行。
补摄航线的长度应满足用户区域网加密布点的要求;c.对于不影响内业加密选点和模型连接的相对漏洞及局部缺陷(如云、云影、斑痕等),可只在漏洞处补摄。
补摄航线的长度应超出漏洞外一条基线;d.应采用同一主距的数字航摄仪进行补摄;e.当采用GPS、POS等辅助航空摄影技术时,应参照相应的补摄与重摄要求进行。
1.3数据文件命名要求以图幅组织数据:1)DSC0_名称.JPG,表示影像文件;2)名称.csv,表示POS文件;其他文件类似上面命名。
1.4精度要求1)数字正射影像(DOM)a)地面分辨率:0.2米;b)数据格式:格式为tif,并带有tfw坐标文件;c)分幅尺寸:50cmx50cm正方形标准分幅;图幅编号采用图廓西南坐标公里数编号法,X坐标公里数在前,Y坐标公里数在后,编号如4261.000-384.500;d)影像定位:DOM数据起始点为左下角像元中心点对应的平面坐标;e)影像色彩模式:24位(比特);f)色彩特征:影像清晰,反差适中,颜色饱和,色彩鲜明,色调一致、纹理清楚,层次丰富,无明显失真,有较丰富的层次、能辨别与地面分辨率相适应的细小地物影像,满足外业全要素精确调绘和室内判读的要求;g)影像噪音:影像应无噪声、污点、划痕。