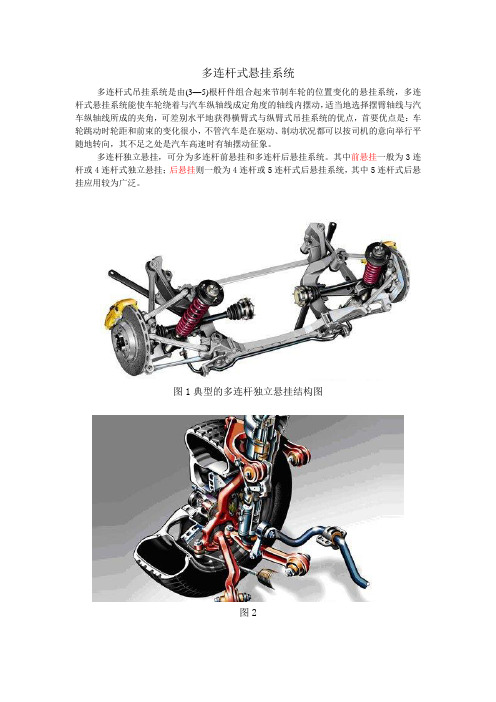
多连杆式前悬架主销轴线的确定
悬架系统设计步骤

悬架系统设计步骤在此主要是分析竞争车型的底盘布置。
底盘布置首先要确定出轮胎、悬架形式、转向系统、发动机、传动轴、油箱、地板、前纵梁结构(满足碰撞)等,因为这些重要的参数,如轮胎型号、悬架尺寸、发动机布置、驱动形式、燃油种类等在开发过程中要尽可能早地确定下来。
在此基础上,线束、管路、减振器、发动机悬置等才能继续下去悬架选择对各种后悬架结构型式进行优缺点比较,包括对后部轮罩间空间尺寸的分析比较,进行后悬架结构的选择。
常见的后悬架结构型式有:扭转梁式、拖曳臂式、多连杆式。
扭转梁式悬架优点:1.与车身连接简单,易于装配。
2.结构简单,部件少,易分装。
3.垂直方向尺寸紧凑。
4.底板平整,有利于油箱和后备胎的布置。
5.汽车侧倾时,除扭转梁外,有的纵臂也会产生扭转变形,起到横向稳定作用,若还需更大的悬架侧倾角刚度,还可布置横向稳定杆。
6.两侧车轮运转不均衡时外倾具有良好的回复作用。
7.在车身摇摆时具有较好的前束控制能力。
8.车轮运动特性比较好,操纵稳定性很好,尤其是在平整的道路情况下。
9.通过障碍的轴距具有相当好的加大能力,通过性好。
10.如果采用连续焊接的话,强度较好。
缺点:1.对横向扭转梁和纵向拖臂的连续焊接质量要求较高。
2.不能很好地协调轮迹。
3.整车动态性能对轴荷从空载到满载的变化比较敏感。
4.但这种悬架在侧向力作用时,呈过度转向趋势。
另外,扭转梁因强度关系,允许承受的载荷受到限制。
扭转梁式悬架结构简单、成本低,在一些前置前驱汽车的后悬架上应用较多。
拖曳臂式悬架优点:1.Y轴和X轴方向尺寸紧凑,非常有利于后乘舱(尤其是轮罩间宽度尺寸较大)和下底板备胎及油箱的布置。
2.与车身的连接简单,易于装配。
3.结构简单,零件少且易于分装;4.由于没有衬套,滞后作用小。
5.可考虑后驱。
缺点:1.由于沿着控制臂相对车身转轴方向控制臂较大的长宽比,侧向力对前束将产生不利的影响。
2.车身摇摆(bodyroll)对外倾产生不利影响;(适当的控制臂转轴有可能改善外倾的回复能力,但这导致轮罩间宽度尺寸的减小。
(完整word版)悬挂--详解多连杆独立悬挂

悬挂-—详解多连杆独立悬挂曾几何时,结构复杂、成本高昂的多连杆式独立悬架还只应用于豪华轿车,而随着近些年汽车制造技术的不断提升,零部件单位生产成本逐步降低,这种悬挂已广泛应用于中级车型和一些强调操控性的紧凑车型上,相比传统麦弗逊式和拖拽臂式,其结构上的优势是显而易见的。
追根溯源一下,最早应用多连杆悬挂的应该是这款1979年下线的奔驰S-Class W126车型没有像麦弗逊,整体桥等结构渊源的发展历史。
多连杆结构的盛行只是近这二、三十年的事,追溯一下,最早使用这种悬挂形式的量产车的是奔驰的S-Class W126车系,但在当时,这种悬挂形式还处于萌芽阶段,结构相对简单,因此很多人会认为它是“双叉臂结构”的变种,因为它的外观结构甚至特性与双叉臂系统非常相近,但后来推出的多连杆形式不断地出现四连杆,甚至五连杆,人们才发现这种结构具有很高的可塑性和延展性,而结构也越来越复杂。
■多连杆悬挂的工作结果是由各个连杆共同作用的组合而成顾名思义,多连杆式悬挂就是指由三根或三根以上连杆拉杆构成的悬挂结构,以提供多个方向的控制力,使车轮具有更加可靠的行驶轨迹。
常见的有三连杆、四连杆、五连杆等。
但由于三连杆结构已不能满足人们对于底盘操控性能的更高追求.因此结构更为精确、定位更加准确的四连杆式和五连杆式悬架才能称得上是真正的多连杆式,这两种悬架结构通常应用于前轮和后轮。
在结构上以常见的五连杆式后悬挂为例,其五根连杆分别为:主控制臂、前置定位臂、后置定位臂、上臂和下臂。
它们分别对各个方向产生作用力.比如,当车辆进行左转弯时,后车轮的位移方向正好与前转向轮相反,如果位移过大则会使车身失去稳定性,摇摆不定。
此时,前后置定位臂的作用就开始显现,它们主要对后轮的前束角进行约束,使其在可控范围内;相反,由于后轮的前束角被约束在可控范围内,如果后轮外倾角过大则会使车辆的横向稳定性减低,所以在多连杆悬架中增加了对车轮上下进行约束的控制臂,一方面是更好的使车轮定位,另一方面则使悬架的可靠性和韧性进一步提高。
基于NSGA-II算法的多连杆悬架多目标优化

基于NSGA-II算法的多连杆悬架多目标优化奉铜明;钟志华;闫晓磊;陈瑜【摘要】应用空间运动学中刚体姿态坐标变换建立多连杆悬架的数学模型,基于瞬时旋转轴的近似数值方法确定其虚拟主销轴线.该数学模型通过用ADAMS/CAR软件建立的相应模型的仿真得到验证.结合NSGA-II算法对多连杆悬架跳动过程中车轮前束角、车轮外倾角和车轮侧向滑移的变化进行了优化,获得了三目标Pareto最优解集,结果表明,该方法对多连杆悬架的优化效果良好.【期刊名称】《汽车工程》【年(卷),期】2010(032)012【总页数】4页(P1063-1066)【关键词】多连杆悬架;姿态坐标变换;虚拟主销;多目标优化【作者】奉铜明;钟志华;闫晓磊;陈瑜【作者单位】湖南大学,汽车车身先进设计制造国家重点实验室,长沙,410082;湖南大学,汽车车身先进设计制造国家重点实验室,长沙,410082;湖南大学,汽车车身先进设计制造国家重点实验室,长沙,410082;湖南大学,汽车车身先进设计制造国家重点实验室,长沙,410082【正文语种】中文前言多连杆式悬架是指由3根或3根以上的连杆构成,并能提供多个方向控制力的悬架。
由于它具有优异的运动学和动力学性能,多连杆悬架在现代轿车中的应用日益广泛。
近年来,研究多连杆悬架运动特性的方法不断涌现,文献[1]中推导出转向节的速度方程,并应用逐步线性化方法来解位置问题,文献[2]中应用刚性连杆和转向节之间的约束方程获得悬架的运动特性,文献[3]中提出用拆杆法分析连杆悬架力和位移;而文献[4]中则采用位移矩阵法求解转向节虚拟主销轴线的位置。
多连杆式悬架与双横臂悬架之间的差别,除了控制臂的物理特性之外,还表现在多连杆悬架不存在实际的主销,其主销轴线以虚拟主销形式出现[5]。
这给设计带来了很大的灵活性,使多连杆悬架有很大的优化空间,能提供更好的运动学特性。
1 多连杆悬架数学模型的建立悬架刚体运动学分析的内容是求解车轮上下跳动时车轮定位参数的变化规律,几何模型如图 1所示,其中主坐标系oxyz的原点位于车辆质心处,x轴通过原点指向车前进的方向,z轴通过原点指向上方,y轴通过原点垂直于xoz平面,指向车辆左侧。
八种常见汽车悬挂系统的详细介绍

八种常见汽车悬挂系统的详细介绍2008-06-17 16:50:19 来源:中国汽车电子网关键字:悬挂系统悬挂系统是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车能平顺地行驶。
典型的悬挂系统结构由弹性元件、导向机构以及减震器等组成,个别结构则还有缓冲块、横向稳定杆等。
弹性元件又有钢板弹簧、空气弹簧、螺旋弹簧以及扭杆弹簧等形式,而现代轿车悬挂系统多采用螺旋弹簧和扭杆弹簧,个别高级轿车则使用空气弹簧。
悬挂系统是汽车中的一个重要总成,它把车架与车轮弹性地联系起来,关系到汽车的多种使用性能。
从外表上看,轿车悬挂系统仅是由一些杆、筒以及弹簧组成,但千万不要以为它很简单,相反轿车悬架是一个较难达到完美要求的汽车总成,这是因为悬挂系统既要满足汽车的舒适性要求,又要满足其操纵稳定性的要求,而这两方面又是互相对立的。
比如,为了取得良好的舒适性,需要大大缓冲汽车的震动,这样弹簧就要设计得软些,但弹簧软了却容易使汽车发生刹车“点头”、加速“抬头”以及左右侧倾严重的不良倾向,不利于汽车的转向,容易导致汽车操纵不稳定等。
(一)非独立悬挂系统非独立悬挂系统的结构特点是两侧车轮由一根整体式车架相连,车轮连同车桥一起通过弹性悬挂系统悬挂在车架或车身的下面。
非独立悬挂系统具有结构简单、成本低、强度高、保养容易、行车中前轮定位变化小的优点,但由于其舒适性及操纵稳定性都较差,在现代轿车中基本上已不再使用,多用在货车和大客车上。
(二)独立悬挂系统独立悬挂系统是每一侧的车轮都是单独地通过弹性悬挂系统悬挂在车架或车身下面的。
其优点是:质量轻,减少了车身受到的冲击,并提高了车轮的地面附着力;可用刚度小的较软弹簧,改善汽车的舒适性;可以使发动机位置降低,汽车重心也得到降低,从而提高汽车的行驶稳定性;左右车轮单独跳动,互不相干,能减小车身的倾斜和震动。
常见的五种车辆悬挂系统解析

连杆支柱悬挂
连杆支柱与麦弗逊悬挂一样, 用来支撑车体也是减振器支柱,这 种悬挂把减振器,减振弹簧组装在 一个总成中。连杆支柱悬挂也有一 跟粗大的减振器支柱,与麦弗逊悬 挂的主要区别在于,悬挂下部与车 身连接的A字型控制臂改成了三根 连杆定位。转弯时产生的横向力, 主要由减振器支柱和横拉杆来承担 。它具有与麦弗逊悬挂相近的操控 性能,又有比麦弗逊悬挂更高的连 接刚度和相对较好的抗侧倾性能。 但是同样也存在麦弗逊悬挂的缺点 ,就是稳定性不好,转向侧倾还是 较大,需要加装平衡杆来减小转向 侧倾。
国内采用这种后悬挂的主要有昌河铃木利亚纳、东风悦达起 亚赛拉图,北京现代伊兰特、广州丰田凯美瑞等。 相对纵臂扭转梁来说,它达到了全独立悬挂的结构要求,并且 运动部件质量轻,悬挂响应性好,舒适性和操控性要优于纵臂扭转 梁的,但比真正的多连杆悬架要差一些。不过其占有空间小于真正 的多连杆式悬挂,成本也低于多连杆悬挂故被不少厂家采用。
加装防倾杆的拖拽臂式后悬挂
单纵臂扭杆梁式悬挂(俗称拖曳臂式悬挂)优缺点及适用车型: 主要优点:结构简单实用、占用空间最小、制造成本低 。 主要缺点:承载性能差、抗侧倾能力较弱、减震性能差、 舒适性有限 适用车型:中小型汽车、低端SUV后悬挂
双叉臂式独立悬挂
双叉臂式悬挂通常采用上下不等长叉臂 (上短下长),让车轮在上下运动时能自动 改变外倾角并且减小轮距变化减小轮胎磨损 ,并且能自适应路面,轮胎接地面积大,贴 地性好。 相比麦弗逊式悬挂双叉臂多了一 个上摇臂,不仅需要占用较大的空间,而且 其定位参数较难确定,因此小型轿车的前桥 出于空间和成本考虑一般不会采用此种悬挂 。但其具有侧倾小,可调参数多、轮胎接地 面积大、抓地性能优异,因此绝大部分纯正 血统的跑车的前悬挂均选用双叉臂式悬挂。
汽车悬挂系统结构原理详细图解
汽车悬挂系统结构原理图解Post by:2010-10-419:48:00什么是悬挂系统舒适性是轿车最重要的使用性能之一。
舒适性与车身的固有振动特性有关,而车身的固有振动特性又与悬架的特性相关。
所以,汽车悬架是保证乘坐舒适性的重要部件。
同时,汽车悬架做为车架(或车身)与车轴(或车轮)之间作连接的传力机件,又是保证汽车行驶安全的重要部件。
因此,汽车悬架往往列为重要部件编入轿车的技术规格表,作为衡量轿车质量的指标之一。
汽车车架(或车身)若直接安装于车桥(或车轮)上,由于道路不平,由于地面冲击使货物和人会感到十分不舒服,这是因为没有悬架装置的原因。
汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。
它的作用是弹性地连接车桥和车架(或车身),缓和行驶中车辆受到的冲击力。
保证货物完好和人员舒适;衰减由于弹性系统引进的振动,使汽车行驶中保持稳定的姿势,改善操纵稳定性;同时悬架系统承担着传递垂直反力,纵向反力(牵引力和制动力)和侧向反力以及这些力所造成的力矩作用到车架(或车身)上,以保证汽车行驶平顺;并且当车轮相对车架跳动时,特别在转向时,车轮运动轨迹要符合一定的要求,因此悬架还起使车轮按一定轨迹相对车身跳动的导向作用。
悬架结构形式和性能参数的选择合理与否,直接对汽车行驶平顺性、操纵稳定性和舒适性有很大的影响。
由此可见悬架系统在现代汽车上是重要的总成之一。
一般悬架由弹性元件、导向机构、减振器和横向稳定杆组成。
弹性元件用来承受并传递垂直载荷,缓和由于路面不平引起的对车身的冲击。
弹性元件种类包括钢板弹簧、螺旋弹簧、扭杆弹簧、油气弹簧、空气弹簧和橡胶弹簧。
减振器用来衰减由于弹性系统引起的振动,减振器的类型有筒式减振器,阻力可调式新式减振器,充气式减振器。
导向机构用来传递车轮与车身间的力和力矩,同时保持车轮按一定运动轨迹相对车身跳动,通常导向机构由控制摆臂式杆件组成。
种类有单杆式或多连杆式的。
钢板弹簧作为弹性元件时,可不另设导向机构,它本身兼起导向作用。
主销初始参数恒定条件下的四连杆悬架优化

架初 始 位置 主销定 位参 数恒 定 的 四连杆 悬架 优 化模
这些参 数不 变 , 求 改 善悬 架 性 能 的同 时 最 大 程 度 力 地保持 原结 构设 计参 数恒 定 , 以降低设 计 成本 。 四连杆 悬架 来 源 于 双横 臂悬 架 , 主 销 轴 线 是 其 以“ 拟 的” 虚 瞬时 转 动轴 线 形 式存 在 , 使 得 四连杆 这 悬架具 备 了更 大 的 性 能优 势 , 而 逐 渐 在 中高 级 轿 从 车上 广泛 应用 。但 虚 拟 主 销 的 位 置 难 以 确 定 、 位 定 参数难 以保 持恒 定 , 得设 计工 作 的难 度 大 大增 加 , 使 借助 优化 技术 可 以使 这 些 难 度 降 低 , 因此 对 四连 杆
p n r man d u h n e s ta h xe d d ln fa lln si h u pe so e tc ly i tre t h i g i x s i e i e nc a g d i h tte e tn e i e o l i k n te s s n in v ria l n e s cs t e k n pn a i. Un e he e c ndto s i e t smo li u l a d a p i z t n i o d t d f rfurln us e so . T d r t s o i n ,a k n ma i de s b it n n o tmia i sc n uce o —i k s p n i n i c o o he r s l ho t a h ui d lc n k e h n t la in n a a tr fkig i nc a g d b f r n f ro — e u t s w h tte b l mo e a e p t e i ii l me tp r me es o n p n u h n e eo e a d a t p s t a g e tmia in,a d t e p ro ma c fo tmie u p n in i r al mp o e i z to n h e f r n e o p i z d s s e so sg e t i rv d. y
悬架 汽车车轮的定位参数解析

主销后倾:Kingpin Caster主销(Kingpin),是传统汽车上转向轮转向时的回转中心,是一根较粗的销轴。
现在,许多独立悬架的汽车已经没有主销了。
但在车轮定位中,仍然沿用主销这个名词,把它作为转向轮的转向轴线的代名词,认为转向轮在转向时,是以主销为轴线向左右转动的。
所谓主销后倾,是将主销(即转向轴线)的上端略向后倾斜。
从汽车的侧面看去,主销轴线与通过前轮中心的垂线之间形成一个夹角,即主销后倾角。
作用:主销后倾的作用是增加汽车直线行驶时的稳定性和在转向后使前轮自动回正。
作用原理:由于主销后倾,主销(即转向轴线)与地面的交点位于车轮接地点的前面。
这时,车轮因受到地面的阻力,总是被主销拖着前进。
这样,就能保持行驶方向的稳定。
当汽车转弯时,由于离心力的作用,地面对车轮的侧向反力作用在主销的后面,由前悬架在车架上的安装位置来保证。
现代轿车由于采用低压宽幅子午线轮胎,高速行驶时轮胎的变形加大,接地点后移,因此主销后倾角可以减小,甚至为负值(变成主销前倾),以避免由于回正力矩过大而造成前轮摆振。
主销后倾与主销内倾区别:主销后倾如图所示,过车轮中心的铅垂线和真实或假想的转向主销轴线在车辆纵向对称平面的投影线所夹锐角为主销后倾角,向前为负,向后为正。
主销后倾:主销后倾角的存在可使车轮转向轴线与路面的交点在轮胎接地点的前方,可利用路面对轮胎的阻力产生绕主销轴线的回正力矩,该力矩的方向正好与车轮偏转方向相反,使车辆保持直线行驶。
后倾角越大车辆的直线行驶性越好,转向后方向盘的回复性也越好,但主销后倾角过大会使转向变得沉重,驾驶员容易疲劳;主销后倾角过小,当汽车直线行驶时,容易发生前轮摆振,转向盘摇摆不定,转向后转向盘自动回正能力变弱,驾驶员会失去路感;当左右轮主销后倾角不等时,车辆直线行驶时会引起跑偏,驾驶员不敢放松转向盘,难于操纵或极易引起驾驶员疲劳。
四轮定位仪测量主销后倾角的范围为±15°。
典型的多连杆独立悬挂结构图
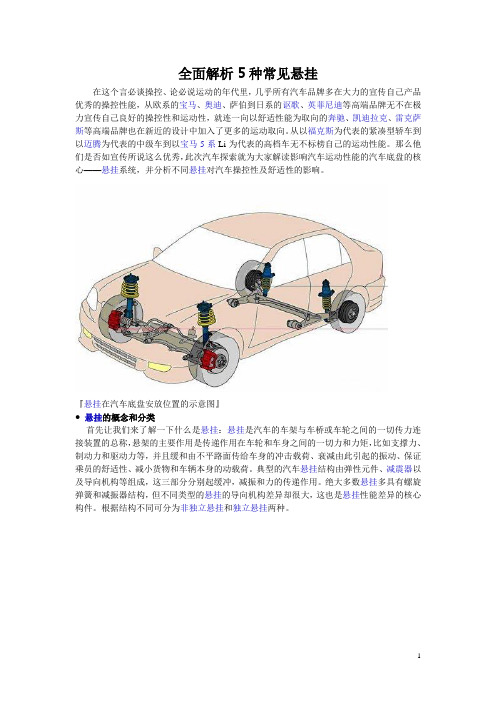
全面解析5种常见悬挂在这个言必谈操控、论必说运动的年代里,几乎所有汽车品牌多在大力的宣传自己产品优秀的操控性能,从欧系的宝马、奥迪、萨伯到日系的讴歌、英菲尼迪等高端品牌无不在极力宣传自己良好的操控性和运动性,就连一向以舒适性能为取向的奔驰、凯迪拉克、雷克萨斯等高端品牌也在新近的设计中加入了更多的运动取向。
从以福克斯为代表的紧凑型轿车到以迈腾为代表的中级车到以宝马5系Li为代表的高档车无不标榜自己的运动性能。
那么他们是否如宣传所说这么优秀,此次汽车探索就为大家解读影响汽车运动性能的汽车底盘的核心——悬挂系统,并分析不同悬挂对汽车操控性及舒适性的影响。
『悬挂在汽车底盘安放位置的示意图』● 悬挂的概念和分类首先让我们来了解一下什么是悬挂:悬挂是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,悬架的主要作用是传递作用在车轮和车身之间的一切力和力矩,比如支撑力、制动力和驱动力等,并且缓和由不平路面传给车身的冲击载荷、衰减由此引起的振动、保证乘员的舒适性、减小货物和车辆本身的动载荷。
典型的汽车悬挂结构由弹性元件、减震器以及导向机构等组成,这三部分分别起缓冲,减振和力的传递作用。
绝大多数悬挂多具有螺旋弹簧和减振器结构,但不同类型的悬挂的导向机构差异却很大,这也是悬挂性能差异的核心构件。
根据结构不同可分为非独立悬挂和独立悬挂两种。
『奥迪S4前后均采用了独立悬挂』非独立悬挂由于是用一根杆件直接刚性地连接在两侧车轮上,一侧车轮受到的冲击、振动必然要影响另一侧车轮,这样自然不会得到较好的操纵稳定性及舒适性,同时由于左右两侧车轮的互相影响,也容易影响车身的稳定性,在转向的时候较易发生侧翻。
独立悬挂底盘扎实感非常明显。
由于采用独立悬挂汽车的两侧车轮彼此独立地与车身相连,因此从使用过程来看,当一侧车轮受到冲击、振动后可通过弹性元件自身吸收冲击力,这种冲击力不会波及另一侧车轮,使得厂家可在车型的设计之初通过适当的调校使汽车在乘坐舒适性、稳定性、操纵稳定性三方面取得合理的配置。
多连杆悬架详解(样例5)

多连杆悬架详解(样例5)第一篇:多连杆悬架详解多连杆悬架详解汽车悬挂系统从最初的非独立悬挂到独立悬挂,然后又从独立悬挂中衍生出麦弗逊,双叉式等繁多的种类,这里我们来介绍独立悬挂中最先进的设计:多连杆悬挂所谓多连杆悬挂,顾名思义就是通过各种连杆配置把车轮与车身相连的一套悬挂机构。
而连杆数量在3根以上才称为多连杆,目前主流的连杆数量为5连杆。
因此其结构要比双叉和麦弗逊复杂很多。
我们知道,双叉悬挂是通过上下两个A字型控制臂对车轮进行定位。
由于A字型控制臂仅能做上下方向的浮动,通过对控制臂长度的设计配置可以达到动态控制车轮外倾角的目的,提高汽车转弯时的操控性能。
但对于转向轮和随动轮来说,仅仅靠控制外倾角来适应弯道所提高的性能显然是有限的。
在四轮定位参数中除了外倾角,还有前束角也是影响弯道操控的重要参数,那么怎么样才能像控制外倾角一样动态控制前束角呢?这一点双叉臂可以做到,但提高的性能非常有限。
虽然双叉臂悬挂在设计上拥有很大的设计自由度,如果要用双叉臂来控制前束,通常的做法就是在A字型控制臂与车身相连的前端连接处装入较柔软的橡胶衬套。
当车辆转弯时由于前后衬套的刚度不同,车轮会向弯道方向改变一定的前束角度,如果这种设计用于后轮,后轮就可在横向力的作用下随动转向,虽然这个转向角度很小,但对性能还是有一定提高的。
通过设计橡胶衬套的刚度能达到一定的可变前束角角度以及随动转向功能,但橡胶衬套的首要任务还是起连接悬挂和隔绝震动的作用,因此刚度不能过低。
这就造成对可变前束以及随动转向的局限性,紧能获得一个很小的角度。
多连杆悬挂就完全解决了这个问题,它通过不同的连杆配置,使悬挂在收缩时能自动调整外倾角,前束角以及使后轮获得一定的转向角度。
其原理就是通过对连接运动点的约束角度设计使得悬挂在压缩时能主动调整车轮定位,而且这个设计自由度非常大,能完全针对车型做匹配和调校。
因此多连杆悬挂能最大限度的发挥轮胎抓地力从而提高整车的操控极限。
前麦弗逊悬架和后多连杆悬架设计毕业论文

前麦弗逊悬架和后多连杆悬架设计毕业论文目录摘要...................................................... 错误!未定义书签。
Abstract .................................................. 错误!未定义书签。
第一章绪论 (1)1.1课设背景及研究意义 (1)1.2国外的研究现状 (1)1.3本文的主要研究容 (3)第二章悬架的结构分析与整体参数设计 (3)2.1悬架系统的简介与分类 (4)2.1.1悬架系统的简介 (4)2.1.2悬架系统的分类 (5)2.2独立悬架的特点 (5)2.3整体参数的设计 (6)2.3.1主要技术指标或主要参数 (6)2.3.2频率的选取与计算 (7)2.3.3悬架系统的静挠度 (7)2.3.4悬架系统的动挠度 (8)2.3.5悬架系统刚度 (8)第三章悬架系统的设计计算 (9)3.1悬架设计的一般要求 (10)3.2减振器选择 (10)3.2.1减震器工作原理 (10)3.2.2阻尼系数的确定 (11)3.2.3最大卸载力 (13)3.2.4减振器的尺寸设计 (14)3.3螺旋弹簧的设计计算 (17)3.4横向稳定杆设计 (21)3.5悬架系统的杆系设计 (24)第四章悬架的三维建模 (25)4.1麦弗逊前悬架的三维建模 (25)4.2后多连杆悬架的三维建模 (28)4.3整车悬架装配图 (31)第五章悬架系统的运动学仿真 (33)5.1基于adams/view的运动仿真 (33)5.2基于adams/car的仿真分析 (34)第六章整车悬架的主动化改造 (42)6.1传统悬架的弊端 (42)6.2电控悬架的优势 (42)6.3电控悬架 (42)6.3.1电控悬架的分类 (42)6.3.2电控悬架系统的组成 (43)6.3.3电控悬架的工作原理 (44)6.4主动化方案 (46)第七章总结与展望 (48)7.1总结 (48)7.2展望 (48)参考文献 (49)致谢.................................................... 错误!未定义书签。
一种C级轿车多连杆前悬架的定位参数分析

柱 、 向中间传动轴 、 向器和转 向横拉杆构成 , 转 转 转 向横 拉杆 与转 向节通 过球 铰相 连 :横 向稳 定 杆
中间 通过 弹性衬 套 与副 车架相 连 ,两端 通 过稳 定 杆连杆 与下前 摆臂 相连 。 运用 A A /a 建 立 该 多 连 杆 前 悬 系 统 模 D MScr 型如 图 1主要 步骤 如下 : ,
\
据【 本文针对某 C级轿车的前多连杆式独立悬架 3 】 。 模型进行仿真 。给车轮输入一 0 4 r 4 ~ 0 m的跳动行 a
\
\
设 计要 求 。
程. 验证轮距 、 前束 、 外倾角 、 主销后倾角 、 主销 内 倾角的变化与实际工况的符合性 ,是否满足设计
要求。
21 轮 距 .
后 摆臂 、 向节 、 转 减震 器 总成 、 减震 器上 支座 、 车 副 架 等构 成 。 上前 摆臂 、 摆臂 与减震 器支 座 由两 上后
稳定性好 。 可减小轮胎磨损等特点, 被广泛应用于 中、 高级轿 车前后 悬架 。 多连杆 式悬架 是 由 3 5根 ~ 杆件组合在一起来控制车轮位置变化 的悬架 。多 连杆式悬架能使车轮绕着与汽车纵轴线成一定角 度的轴线摆动,是横臂式和纵臂式悬架的折中方 案 ,适当地选择摆臂轴线与汽车纵轴线所成的夹 角 ,可不 同程度 地获 得横臂 式 和纵 臂式 悬架 的优
点, 能满 足不 同的使 用性能 要求…。 本 文通 过 量取 某 C级轿 车 样 车 的悬 架 硬 点 .
个弹性衬套相连, 下前摆臂 、 下后摆臂与副车架 由 两 个 弹性衬 套 相连 ,四个 摆臂 与转 向节 通 过球 铰 相 连 。减震 器下 端 与下前 摆臂 由一 个 弹性衬 套 相
汽车底盘悬架结构设计要点分析
汽车底盘悬架结构设计要点分析发布时间:2022-07-28T08:11:42.268Z 来源:《福光技术》2022年16期作者:师海辉[导读] 悬架连接着车桥和车架,主要零部件包括:弹性元件、减震器及导向机构。
长城汽车股份有限公司河北保定 071000摘要:汽车悬架是车轮(或车轴)与负载支撑件(或车架)之间所有力传递连接的总称,是确保行驶舒适性和行驶安全性的重要组成部分,并具有缓冲和吸收由于道路不平坦而产生的传递力的能力。
通过对框架或车身施加冲击和振动,它可以在两辆汽车之间传递所有力和扭矩,从而使汽车平稳行驶。
在底盘悬架结构中,现在的双纵向臂独立悬架结构将上下纵向臂的长度都进行了改进,能够合理的去配合车轮和车架与纵向臂的连接。
这样就使车轮在运动的过程中,能够使轴距和前轮的定位参数一直保持在公差范围内,这样能够保证汽车在行驶的过程中的安全性和稳定性。
关键词:汽车底盘悬架;结构设计要点1汽车悬架系统研究概况1.1汽车悬架分类悬架连接着车桥和车架,主要零部件包括:弹性元件、减震器及导向机构。
按照悬架的结构形式不同,悬架可分为非独立悬架和独立悬架两种;按照功能不同可分为被动悬架、半主动悬架和主动悬架。
常见的独立悬架形式有:麦弗逊式独立悬架、多连杆式独立悬架、双叉式独立悬架等。
悬架性能影响整车的各项性能,尤其是车辆操作性能、行驶稳定性能、制动性能以及舒适性能越来越被消费者看重,为了实现悬架的不同功能,各种新形式的悬架汽车也不断涌现。
半主动悬架是指在使用过程中,悬架的阻尼系统和弹性元件中有一项可以随着使用条件的不同,可以进行调整的悬架类型;全主动悬架是阻尼系数和刚度都可以进行调节的,可以根据汽车的实际需求,将刚度和阻尼调整到最佳的工作状态。
1.2悬架的运动学和动力学特性悬架是整车的重要组成部分,一般在对悬架系统进行研究设计时,都是针对整车的操稳性和平顺性为设计目标,对悬架与整车的性能协调研究。
悬架运动学作为悬架设计时用到的一个重要知识点,贯穿了悬架的整个设计过程,包括对悬架运动特性分析、力学特性分析以及弹性特性分析等。
汽车悬架运动学与动力学概述

拖曳臂式悬架作为一种半独立悬架,在一些轿车的后悬上也获得了较多的应用。此外,多轴汽车还多 采用平衡悬架,包括等臂式平衡悬架和摆臂式平衡悬架[1]。
悬架根据其刚度和阻尼是否可调,又可分为被动悬架、半主动悬架和主动悬架。被动悬架的刚度和阻 尼均不可调,半主动悬架的阻尼可调但刚度不可调,主动悬架的刚度和阻尼均可调[1]。半主动悬架和主动 悬架是控制技术在汽车悬架上应用的结果,通过主动调节悬架的性能来获取最佳减振状态,提高乘坐舒适 性。国外很多公司已开展了对半主动悬架和主动悬架的研究试验,并逐渐应用于实际车辆上[1]。王国丽、 顾亮等综述了车辆主动悬架技术的现状,并指出了其发展方向[8]。
28.2 悬架发展技术现状
28.2.1 悬架类型概述
悬架通常按导向机构的结构特点分为非独立悬架和独立悬架两大类。介于二者之间,还有一种通常应 用于汽车后悬架的半独立悬架— — 拖曳臂式悬架(又称复合纵臂式后支持桥悬架)[2][3]。非独立悬架的结构特 点是两侧的车轮由一根整体式车桥相连,车轮连同车桥一起通过弹性悬架悬挂在车架或车身的下面,当一 侧车轮跳动时会影响另一侧车轮的运动[1]。独立悬架则是每一侧的车轮单独地通过弹性悬架悬挂在车架或 车身的下面,因此两侧车轮的跳动相对独立,互不影响[1]。在拖曳臂式半独立悬架中,两侧车轮的拖曳臂 通过一根扭转梁连接,因而可使两侧车轮的运动具有一定的独立性[3]。
多连杆式前悬架主销轴线的确定

(10)
将 (6) 式和 (9) 式带入并整理得
( qi ×L i) ·udθ+ L i·ds =λiL i·dAi ( i = 1 ,1115)
(11) 将 (11) 式整理为矩阵形式 , 就得到了下面这个含 有 7 个未知数的线性方程组 , 这 7 个未知数分别是 : Ux , Uy , Uz , d Cx , d Cy , d Cz 和 d yA5 。 ( q1 ×L 1) x ( q1 ×L 1) y ( q1 ×L 1) z L 1 x L 1 y L 1 z ( q2 ×L 2) x ( q2 ×L 2) y ( q2 ×L 2) z L 2 x L 2 y L 1 z ( q3 ×L 3) x ( q3 ×L 3) y ( q3 ×L 3) z L 3 x L 3 y L 3 z ( q4 ×L 4) x ( q4 ×L 4) y ( q4 ×L 4) z L 4 x L 4 y L 4 z ( q5 ×L 5) x ( q5 ×L 5) y ( q5 ×L 5) z L 5 x L 5 y L 5 z
Analysis of Kingpin Axis of MultiΟlink Fro nt Susp ensio n
SONG Jian , SHI Lei (Tsinghua University , State Key Laboratory of Automobile Safety and Energy Conservation , Beijing 100084 , China)
(清华大学 汽车安全与节能国家重点实验室 , 北京 100084)
摘要 : 应用 ADAMS 软件的 CAR 模块建立轿车多连杆式前悬架和转向系统的多体运动学模型 , 对主销和前轮定位角进 行仿真计算研究 。同时还应用空间运动学中的瞬时螺旋轴方法建立同种悬架的数学模型 , 研究分析主销和前轮定位角 随车轮上下跳动时的变化规律 。采用两种方法仿真计算结果的一致性说明这两种方法都是确定多连杆式前悬架主销和 前轮定位角的行之有效的方法 。 关键词 : 多连杆式悬架 ; 主销轴线 ; 瞬时螺旋轴 中图分类号 : U467113 文献标识码 : A
多连杆式前悬架的转向定位参数仿真计算研究

ห้องสมุดไป่ตู้
杆 4和车 身也 构成
一
个 空 间 四 连 杆 机
下摆臂 3 两个 )转 向横拉杆 4 两 个 )转 向节 5 两个 )转 ( 、 ( 、 ( 、 齿条 6 一个 )减震器 下半部分 7 两个 ) ( 、 ( 和减震 器上半 瓤 ( 两个 )一共 由 1 , 5个 刚体组成 。仅考虑 图示 部 分 , n 共
比 如 上 海 大 众 的 P sa 5车 型 。 a t s B
都 简化为 刚性 铰链 。
( )由 于 横 向稳 定 杆 对 转 向 节 的 运 动 几 乎 没 有 影 响 , 2 所
以建模 时不考 虑横 向稳 定杆 。
多连杆式 悬架 由布 置在空 间的 3 5根连杆 将转 向节与 - 车身 连接起来 , 连杆 的外 端 与转 向节 通过 球铰 连接 , 连杆 的 内端 与车身通过 橡胶 衬套 连接 。这些 连杆 对 转 向节 提供 了 过 多约束 , 车轮上下跳 动或者左 右转动 时必然产 生橡 胶衬 套 的变形 ; 际上 , 实 巧妙设计 各 个连 杆 的位置 以及橡 胶 衬套 的 刚度 可以十分精 确地控制 主销轴线 和车轮定 位角的变化 。
典 型 的 五 连 杆式 前 悬 架如 图 1 所 示 , 杆 1和 2 连
构成 上 摆 臂 , 杆 连 3和 4 构 成 下 摆 臂 。考 虑到橡 胶 衬 套 的变 形 , 连杆 1 、
转 向 节 、 杆 2 和 连
▲ 图 2 多连杆式前悬 架运动学模 型示 意图 1上摆臂 2 前下摆臂 3 后下摆臂 4 转 向横位杆 5转 向节 . . . . 6 转 向齿 条 7 减振器下 半部分 8 减振器上半部分 . .
多连杆悬架原理

多连杆悬架原理
多连杆悬架是一种常见的汽车悬架系统,它由多个连杆组成,可以提供更好的悬挂和操控性能。
多连杆悬架系统主要由控制臂和连接杆组成。
控制臂连接着车轮和车架,使得车轮能够相对于车架上下运动。
而连接杆则通过铰链连接控制臂和车架,起到增强结构刚度和控制悬挂运动的作用。
多连杆悬架系统可以实现更好的悬挂调节性能。
通过调整控制臂的长度和角度,可以调节悬挂系统的几何结构,以适应不同的路面状况和驾驶需求。
同时,多连杆悬架系统还可以通过调整连接杆的角度和位置,改变车轮的几何参数,如车轮的纵向和横向倾角,以提高悬挂和操控性能。
多连杆悬架系统还可以实现良好的悬挂运动控制。
通过调整连接杆的角度和长度,可以控制车轮的悬挂运动,如上下运动和转向运动,从而减少车身的滚动、俯仰和侧倾。
这不仅可以提高车辆的悬挂舒适性和稳定性,还可以提高车辆的驾驶安全性和操控性能。
总体来说,多连杆悬架系统通过灵活调节悬挂几何结构和控制悬挂运动,为车辆提供了更好的悬挂和操控性能。
它是一种重要的悬挂系统,被广泛应用于各种类型的汽车中。
四轮定位新理论——上海盐隆

电子液压助力的原理与机械液压助力基本相同,不同的是油泵由电动机驱动,同 时助力力度可变。车速传感器监控车速,电控单元获取数据后通过控制转向控制 阀的开启程度改变油液压力,从而实现转向助力力度的悬架,是汽车后悬挂装置类型的一种,是在扭力 梁式非独立悬架上增加一个平衡杆来使车轮产生倾斜,保持车辆 的平稳。
独立悬架
独立式悬挂:每个车轮单独通过一套悬挂安装于车身或者车桥上, 车桥采用断开式,中间一段固定于车架或者车身上;此种悬挂两 边车轮受冲击时互不影响,而且由于非悬挂质量较轻;缓冲与减 震能力很强,乘坐舒适。各项指标都优于非独立式悬挂,但该悬 挂结构复杂,而且还会使驱动桥、转向系变得复杂起来。采用此 种悬挂的有下面两大类车辆:
1.万向节叉 2.转向齿轮轴 3.调整螺母 4.向心球轴承 5.滚针轴承 6.固定螺栓 7.转向横拉杆 8.转向器壳体 9.防尘套 10.转向齿条 11.调整螺塞 12.锁紧螺母
13.压紧弹簧 14.压块
循环球式转向机
循环球式转向器主要由螺杆、螺母、转向器壳体以及许多小钢球等部件 组成,所谓的循环球指的就是这些小钢球,它们被放置于螺母与螺杆之 间的密闭管路内,起到将螺母螺杆之间的滑动摩擦转变为阻力较小的滚 动摩擦的作用,当与方向盘转向管柱固定到一起的螺杆转动起来后,螺 杆推动螺母上下运动,螺母在通过齿轮来驱动转向摇臂往复摇动从而实 现转向。在这个过程当中,那些小钢球就在密闭的管路内循环往复的滚 动,所以这种转向器就被称为循环球式转向器。
➢ 轿车、客车及载人车辆。可明显提高乘坐舒适性,并且在高速 行驶时提高汽车的行驶稳定性。
多连杆
多连杆式悬挂系统
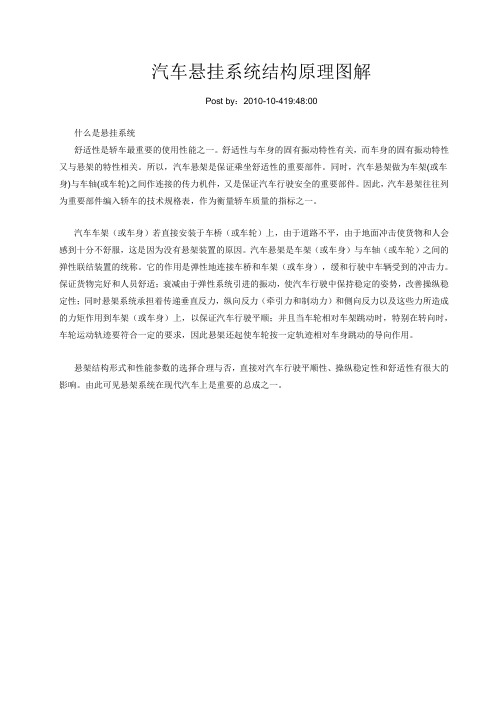
多连杆式吊挂系统是由(3—5)根杆件组合起来节制车轮的位置变化的悬挂系统,多连杆式悬挂系统能使车轮绕着与汽车纵轴线成定角度的轴线内摆动,适当地选择摆臂轴线与汽车纵轴线所成的夹角,可差别水平地获得横臂式与纵臂式吊挂系统的优点,首要优点是:车轮跳动时轮距和前束的变化很小,不管汽车是在驱动、制动状况都可以按司机的意向举行平随地转向,其不足之处是汽车高速时有轴摆动征象。
多连杆独立悬挂,可分为多连杆前悬挂和多连杆后悬挂系统。
其中前悬挂一般为3连杆或4连杆式独立悬挂;后悬挂则一般为4连杆或5连杆式后悬挂系统,其中5连杆式后悬挂应用较为广泛。
图1典型的多连杆独立悬挂结构图
图2
图3。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V ol118 N o16公 路 交 通 科 技2001年12月JOURNA L OF HIGHWAY AND TRANSPORT ATION RESEARCH AND DEVE LOPMENT 文章编号:1002Ο0268(2001)06Ο0099Ο04多连杆式前悬架主销轴线的确定宋 健,石 磊(清华大学 汽车安全与节能国家重点实验室,北京 100084)摘要:应用ADAMS软件的C AR模块建立轿车多连杆式前悬架和转向系统的多体运动学模型,对主销和前轮定位角进行仿真计算研究。
同时还应用空间运动学中的瞬时螺旋轴方法建立同种悬架的数学模型,研究分析主销和前轮定位角随车轮上下跳动时的变化规律。
采用两种方法仿真计算结果的一致性说明这两种方法都是确定多连杆式前悬架主销和前轮定位角的行之有效的方法。
关键词:多连杆式悬架;主销轴线;瞬时螺旋轴中图分类号:U467113 文献标识码:AAnalysis of K ingpin Axis of MultiΟlink Front SuspensionSONG Jian,SHI Lei(Tsinghua University,S tate K ey Laboratory of Autom obile Safety and Energy C onservation,Beijing 100084,China)Abstract:K inematic m odel for a car′s front multi-link suspension and steering system was developed using ADAMS/C AR m odule1An investigation was done of the suspension′s kingpin axis and wheel orientation1S imultaneously,a mathematical m odel was als o built using the instant screw axis method1The similar kingpin axis and wheel orientation analysis was als o implemented1The consistence of both re2 sults shows that either method is accurately fit for calculating of kingpin axis and wheel orientation of front multi-link suspension1K ey words:Multi-link suspension;K ingpin axis;Instant screw axis 近年来,为确保车辆的行驶安全性和舒适性,许多国外轿车都采用了多连杆式悬架或其变种,比如福特公司的T aurus/Sable车型,沃尔沃公司的760G LE车型,三菱汽车公司的G alant车型。
目前这种悬架也开始应用在国产轿车上,比如上海大众的Passat B5车型。
多连杆式悬架由布置在空间的3~5根连杆将转向节与车身连接起来,连杆的外端与转向节通过球铰连接,连杆的内端与车身通过橡胶衬套连接。
这些连杆对转向节提供了过多约束,车轮上下跳动或者左右转动时必然导致橡胶衬套的变形;实际上,巧妙设计各个连杆的位置以及橡胶衬套的刚度可以十分精确地控制主销轴线和车轮定位角的变化。
典型的五连杆式前悬架如图1所示,连杆1和2构成上摆臂,连杆3和4构成下摆臂。
考虑到橡胶衬套的变形,连杆1、转向节、连杆2和车身构成一个空间四连杆机构;同理,连杆3、转向节、连杆4和车身也构成一个空间四连杆机构。
因为转向节是刚体,不可变形,所以这两个空间四连杆的运动是互相制约的;在转向齿条固定不动时,转向节的运动还要受到转向横拉杆的约束。
显然,已不可能象分析双横臂独立悬架那样,通过简单的几何关系来计算主销轴线以及轮胎定位角的变化,这里只有一个假想的主销轴线。
为了确定多连杆式悬架的假想主销轴线,本文采取了两种方法:首先应用ADAMS软件的C AR模块构造了多连杆前悬架以及转向系统的运动学模型,进行仿真分析得到结果;然后应用空间运动学中的瞬时螺旋轴方法对主销轴线进行了数学分析,并将计算结果与ADAMS/C AR的仿真结果相比较。
结果表明,这两种方法都是可靠的。
1 ADAMS模型的建立与仿真计算111 悬架模型的建立图1 在建立运动学模型时做如下简化和假设:(1)所有零部件都认为是刚体,零部件之间的所有连接都简化为刚性铰链。
(2)由于横向稳定杆对转向节的运动几乎没有影响,所以建模时不考虑横向稳定杆。
图2 多连杆式前悬架运动学模型示意图1———上摆臂;2———前下摆臂;3———后下摆臂;4———转向横拉杆;5———转向节;6———转向齿条;7———减震器下半部分;8———减震器上半部分这样便得到了如图2所示的具有3个自由度的多连杆式前悬架运动学模型,图中所示为前悬架左半部分,并且还包括了转向横拉杆和转向齿条,右半部分与左半部分对称。
整个悬架系统包括:上摆臂1(2个),前下摆臂2(2个),后下摆臂3(2个),转向横拉杆4(2个),转向节5(2个),转向齿条6(1个),减震器下半部分7(2个)和减震器上半部分8(2个),一共由15个刚体组成。
仅考虑图示部分,共有4个球铰(B ,C ,D ,E )、5个万向节铰(F ,G ,H ,J ,L )、1个转动铰(A )、1个圆柱铰(K )和1个移动铰(I )。
整个悬架系统(包括右半部分)的自由度N 为N =15×6-8×3-10×4-2×5-2×4-1×5=3这3个自由度分别是悬架左右两侧摆臂的上下摆动和转向节绕假想主销轴线的转动。
在ADAMS/C AR 中建模首先要创建悬架子系统的模板文件,除了要生成各个部件以及部件之间的铰链以外,还要构造将各个子系统装配为一个总成所需要的“通讯器”(C ommunicator );然后利用模板文件生成悬架子系统以及转向子系统,并将它们和悬架测试装置装配在一起。
需要注意的是,在构造悬架模板时必须指明如何计算主销轴线。
在ADAMS/C AR 中有两种计算主销轴线的方法,分别是几何方法和瞬时轴线方法。
当转向主销的上下端点可以确定时,几何方法比较简单;但是在本文构造的多连杆前悬架模型中,并不存在实际的转向主销,所以采取瞬时轴线方法。
112 仿真计算ADAMS 用刚体i 的质心笛卡尔坐标和反映刚体方位的欧拉角或广义欧拉角作为广义坐标,即q i =[x ,y ,z ,Ψ,θ,φ]Ti ,q =[q T1,…,q Tn ]T。
在进行运动学分析时,只需要建立并求解系统的约束方程:Φ(q ,t n )=0,初始位置q 0已知。
任一给定时刻t n 系统位置的确定,可由约束方程通过牛顿Ο辛普森迭代求得9Φ/9q |j Δq j =-Φ(q j ,t n )其中,Δq j =q j +1-q j ;j 表示第j 次迭代。
在ADAMS/C AR 中做双轮同向激振仿真分析可得如图6和图7所示的主销和前轮定位角的变化曲线。
2 瞬时螺旋轴方法与仿真计算分析211 瞬时螺旋轴方法介绍如图3所示,刚体的任何空间运动都可以分解为一种螺旋运动,首先绕瞬时螺旋轴转动d θ角,然后再沿瞬时螺旋轴方向移动d h 距离。
瞬时螺旋轴的方向由单位矢量u 确定,位置由位置矢量r 确定。
在研究刚体上任意一点B (其位置由矢量b 来表示)的空间运动时,选择刚体上另外一点A (其位置由矢量a 来表示)作为参考点,那么点B 的位置矢量b 便可以分解为点A 的位置矢量a 与连接点A 和点B 的刚体方向矢量q 的矢量和。
即b = a + q =( a 0+d a )+( q 0+d q )= b 0+d b (1)而 b 0= a 0+ q 0所以 d b =d a +d q(2)参照示意图4,可发现d q = u d θ×q ,即d b =d a +u d θ×q 。
假设矢量a 用(x a ,y a ,z a )来表示,矢量 u d θ用(U x ,U y ,U z )来表示,那么就可以利用多连杆前悬架运动时的几何关系建立几何约束方程,通过求解几何约束方程得到上述未知数,从而求出假想主销轴线的角度以及前轮的定位角和转向角。
下面将具体阐述约束方程的建立。
公路交通科技 2001年 第6期图3 刚体运动的螺旋分解图4 矢量d q 的计算212 约束方程的建立和求解图5所示为多连杆前悬架的运动矢量图。
在用ADAMS/C AR 建模时,为了消除过多约束,上摆臂通过一对共线的转动铰与车身连接被简化为上摆臂通过一个方向与之相同的转动铰与车身连接;在用瞬时螺旋轴进行计算时,为了方便几何约束方程的建立,将上摆臂看作两个连杆,内端分别通过位于A 1和A 2处的球铰与车身连接,外端通过一个公共的球铰与转向节相连;可以看出,上面这两种简化在分析B 1(B 2)点的运动轨迹时是完全等价的。
连杆L 3,L 4和转向横拉杆L 5两端分别通过球铰与转向节和车身或转向齿条相连接。
选择轮心C 作为研究转向节空间运动的参照点。
那么有下述等式成立图5 多连杆前悬架运动矢量图 L i =A i B i (i =1,111,5)(3) q i =CB i(i =1,111,5)(4) s =OC (O 是Oxyz 坐标系的原点)(5)根据前面介绍的瞬时螺旋轴运动公式,有d B i = u d θ× q i +d s (i =1,111,5)(6)因为点A i (i =1,111,4)固定不动,所以有d L i =d B i (i =1,111,4)(7)考虑到点A 5沿着y 方向的移动,所以有d L 5=d B 5-d A 5(8)其中,d A 5=(0,d y A 5,0)。
综合(7)和(8)两种情况,有d L i =d B i -λi d Ai (i =1,111,5)(9)其中,当时i ≠5时,λi =0;当i =5时,λi =1。
在转向节运动过程中,连杆的长度固定不变,所以有下列约束条件L i ・d L i =0 (i =1,111,5)(10)将(6)式和(9)式带入并整理得( q i × L i )・ u d θ+ L i ・d s =λi L i ・d A i (i =1,1115)(11)将(11)式整理为矩阵形式,就得到了下面这个含有7个未知数的线性方程组,这7个未知数分别是:U x ,U y ,U z ,d C x ,d C y ,d C z 和d y A 5。