第四章空间力系1
第四章空间力系

• 各分力相连的顺序任意,但合成的结果是惟一的。
第四章 空间力系 Spatial Force System
静力学
n
2、解析法 各力沿坐标轴投影得:
FR = F1 + F2 + L + Fn = ∑ Fi
i =1
FRx = F1x + F2x + L + Fnx = ∑ Fix
i =1
n
FRy = F1y + F2y + L + Fny = ∑ Fiy
45o
静力学
D
F2
C F
30o 45o
(2) 列平衡方程
B
F =0 ∑ Fxx = 0
F =0 ∑ F yy = 0 F =0 ∑ Fzz = 0
F11 sin 45 oo − F22 sin 45 oo = 0
F1
α
F A sin 30 oo− F11 cos 45 oo cos 30 oo − F22 cos 45 oo cos 30 oo= 0 F A sin 30 − F cos 45 cos 30
1
第四章 空间力系 Spatial Force System
静力学
§4-1 空间汇交力系
Spatial Concurrent Force System 空间汇交力系:各力作用线不在同一平面而且汇交于一点。
一、力在直角坐标轴上的投影和力沿直角坐标轴的分解
1、空间任意力在轴上的投影
第四章 空间力系 Spatial Force System
16
第四章 空间力系 Spatial Force System
静力学
即:力F对 z 轴之矩,等于该力在垂直于 z 轴 平面上的投影F'对z 轴与投影面交点O之矩。
理论力学第四章1

Z F
如力F对Z轴之矩表示为: M z ( F ) M o ( Fxy ) Fxy h
力与轴相交或与轴平行(力与轴在同一平面内),力对该轴之矩为零。 方向:右手螺旋法则,与Z轴正方向一致时为正,反之为负。单位:N· m
5
2.力对轴的矩
力对轴之矩合力矩定理:各力对任一轴之矩等于各分力对同一轴之矩的 代数和。 例:将Fxy再分解为Fx、Fy,根据合力矩定理则有:
z
即,力对点的矩矢在过该点的某轴上的投影,等于
力对该轴的矩.
7
空间汇交力系
1、力在直角坐标轴上的投影 直接投影法
Fx F cos
Fy F cos
Fz F cos
8Leabharlann 1.力在直角坐标轴上的投影 二次投影法 Fz Fy Fx
F xy F sin
Fx F sin cos
1、 力对点的矩以矢量表示 ——力矩矢 三要素: (1)大小:力F与力臂的乘积 (2) 方向:转动方向 (3) 作用面:力矩作用面.
MO ( F ) r F
(4–8)
矢量方向:右手螺旋定则。(将右手四指握拳并以它们的弯曲 方向表示力使物体绕该轴转动的转向,而拇指的指向就是力对 3 点之矩矢量的指向)
3. 空间汇交力系的平衡:
空间汇交力系平衡的充要条件是:力系的合力为零
即: R F
F
x 2
i
0
2 2
FR
F
Fy Fz
空间汇交力系的平衡方程
F 0 F 0 Fz 0
x y
11
§4-2
空间力偶系
M mi 代数和
1.平面力偶系:
理论力学 第四章 空间力系

r FR = 0
∑F = 0
x
∑F = 0
y
称为空间汇交力系的平衡方程. 称为空间汇交力系的平衡方程. 空间汇交力系平衡的充要条件:该力系中所有 空间汇交力系平衡的充要条件: 充要条件 各力在三个坐标轴上的投影的代数和分别为零. 各力在三个坐标轴上的投影的代数和分别为零.
例 题 1
求: 绳的拉力和墙体的约束反力 。
=
=
F = F′ = F2 1 1
= F2′ = F3 = F3′
= =
定位矢量 滑移矢量 自由矢量 力偶矩矢是自由矢量 力偶矩相等的力偶等效 (5)力偶没有合力,力偶只能由力偶来平衡. 力偶没有合力,力偶只能由力偶来平衡.
3.空间力偶系的合成与平衡条件
=
=
r r r r r r r r r M 1 = r1 × F1 , M 2 = r2 × F2 ,......, M n = rn × Fn
A
P
c a y
i
j k
O
MO ( P ) = r × P = 0 b 0 0 0 P = Pbi
(2)利用力矩关系
x
α
b
M OA ( P ) = M O ( P ) cos α = Pab a 2 + b2 + c 2
MO(P)
例 题 4
已知:OA=OB=OC =b, OA⊥OB⊥OC. 已知: 求: F 对OA边的中点 之矩在 方向的投影。 边的中点D之矩在 方向的投影。 力 边的中点 之矩在AC方向的投影
3、力对点的矩与力对过该点的轴的矩的关系 r r r r M x ( F ) = M x ( Fx ) + M x ( Fy ) + M x ( Fz ) = Fz ⋅ y − Fy ⋅ z
理论力学 第4章-空间力系
第四章 空间力系
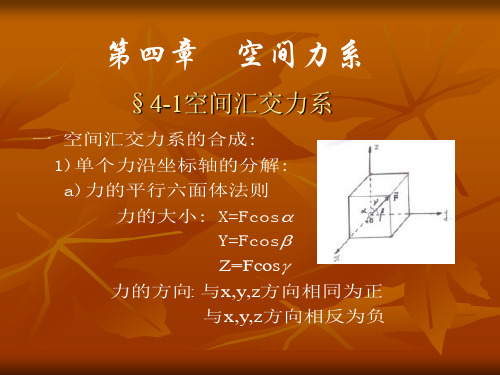
§4-1空间汇交力系
一 空间汇交力系的合成: 1)单 个 力 沿 坐 标 轴 的 分 解 : a)力 的 平 行 六 面 体 法 则 力 的 大 小 : X=Fcosα Y=Fcosβ Z = Fcosγ 力 的 方 向 : 与 x ,y,z 方 向 相 同 为 正 与 x ,y ,z 方 向 相 反 为 负
d) 空 间 汇 交 力 系 的 合 成 :合 力 QQ定 理 . 合力大小: R= ( ∑ X)2 + ( ∑ Y ) 2 + ( ∑ Z ) 2 合 力 方 向 :方 向 余 弦
§4-2 力对轴之矩和力对点之矩
1. 力偶矩矢: 空间力偶对刚体作用矢的效果取 决于以下三个因数
大小:|M|=Fd 转向:右手定则确定 作用面方位:力偶作用面法线所在的空间位置
2. 列空间一般力系平衡方程:
∑x = 0:
T1 + t1 + (T2 + t2 )sinθ + X A + XB = 0
∑ y = 0:
∑M
x
ZA + Z B (T2 + t) θ = 0 cos
பைடு நூலகம்
= 0 : Z B 2b (T1 + T2 ) cos θ b = 0
∑M
∑M
y
= 0 : t1 R + T2 cos θ r T1 R t2 cos θ r = 0
= 0 : (T1 + t2 )b (T2 + t2 ) sin θ b X B 2b = 0
理论力学第七版第四章空间力系

常见的空间力系示例
悬索桥
悬索桥是一种常见的空间力系示例,需要考虑多个力和 力矩的作用。
起重机
起重机是另一个常见的空间力系示例,用于进行吊装和 搬运工作。
空间力系的平衡条件和解题方法
1
ห้องสมุดไป่ตู้
平衡条件
空间力系平衡的条件是合力为零,合力矩为零。
2
解题方法
利用平衡条件和分析方法,逐步确定未知量的数值。
3
示例题目
通过解题方法解决具体问题,加深理解。
空间力系的应用和意义
空间力系的应用涵盖了各个工程领域,可以用于解决实际工程问题,提高工程设计的准确性和效率。
机械工程
用于机械结构的设计和分析,例如机械臂、传动系 统等。
建筑工程
用于建筑物结构的分析和设计,例如桥梁、楼房等。
航空航天
用于航空器和航天器的设计和分析,例如飞机、卫 星等。
海洋工程
用于海洋结构的分析和设计,例如海上平台、潜水 器等。
结论和要点
• 空间力系是由多个力或力矩组成的力的系统。 • 空间力系的力和力矩可以用矢量表示。 • 空间力系需要考虑多个力和力矩的分析和平衡条件。 • 空间力系广泛应用于各个工程领域,提高工程设计的效率和准确性。
复杂性
空间力系一般由多个力和力矩组成,分析较为复杂。
工程应用
空间力系广泛应用于工程力学、机械设计等领域。
空间力系的力和力矩分析方法
力的分析方法
将力分解为分力或合力分解,再 进行叠加得到结果。
力矩的分析方法
根据力对应的力臂和力的矢量关 系,计算力矩。
矢量计算法
利用矢量运算法则,对多个力和 力矩进行矢量计算。
理论力学第七版第四章空 间力系
第四章 空间力系
∑Fy=0
∑Fz=0
上式表明,空间汇交力系平衡的必要和充分条 件是:力系中所有各力在三个坐标轴中每一轴上投 影的代数和分别等于零。
图4.10
4.4.4 空间力系平衡方程的应用
于是可得
P2x=0 P2y=-P2yzcos45°=-0.707kN P2z=P2yzsin45°= 0.707kN 设力P3与z轴的夹角为γ,它在xOy面上的投影与x轴 的夹角为φ,则由式(4.2)可得 P3x=P3sinγcosφ= 2.89kN P3y=P3sinγsinφ= 2.89kN
mx(P) =mx(Pxy)+mx(Pz)=mx(Pz)=84.8N· m my(P) =my(Pxy)+my(Pz)=my(Pz)=70.7N· m mz(P) =mz(Px)+mz(Py)+mz(Pz)= 48.1N· m
图4.5
图4.6
图4.7
图4.8
4.4 空间力系的平衡方程 4.4.1 空间一般力系的平衡方程
mz(F)=mO(F)=±Fd 在一般情况下,力F可能既不平行于z轴,又不 与z轴相交,也不在垂直于z轴的平面内,如图4.5(c) 所示。
力F使门绕z轴转动的效应完全由分力Fxy来确定。 分力Fxy使门转动的效应可用力Fxy对O点之矩来度量, 因此可得 mz(F)=mz(Fxy)=mO(Fxy)=±Fxyd
Fy=±Fsinγsinφ
Fz=±Fcosγ
【例4.1】在一立方体上作用有三个力P1、P2、P3,如图 4.4所示。已知P1=2kN,P2=1kN,P3=5kN,试分别计算这 三个力在坐标轴x、y、z上的投影。 【解】力P1的作用线与轴x平行,与坐标面yOz垂直,与 轴y、z也垂直,根据力在轴上的投影的定义可得 P1x=-P1=-2kN P1y=0 P1z=0 力P2的作用线与坐标面yOz平行,与轴x垂直,先将 此力投影在x轴和yOz面上,在x轴上投影为零,在yOz面 上投影P2yz就等于此力本身;然后再将P2yz投影到y、z轴 上。
第4章 空间力系

Ai
A1 + A2
yC =
yi Ai = A1 y1 + A2 y2 = 25.37mm
Ai
A1 + A2
(2)负面积法
将该图形看成是一个大矩形I减去一个小矩
形II。它们的形心位置分别为C 1(xl,yl)、 C2 (x2,y2)。其面积分别为A1和A2。根据图 形分析可知,
x1=20mm , y1=30mm , A1=40 × 60=2400mm2
M z (F ) = M O (Fxy ) = Fxyd
结论:力对某轴之矩是力使物体绕该轴 转动效应的度量,其大小等于力对垂直 于某轴平面内力对O点(即某轴在该面 的投影点)之矩。
力对轴之矩的符号规定:
空间力系合力矩定理:
M FR = M F1 + M F2 + + M Fn
= M Байду номын сангаасi
x2=30mm , y2=38mm , A2=20 × 44=880mm2
则有:
xC =
xi Ai = A1x1 A2x2 = 14.21mm
Ai
A1 A2
yC =
yi Ai = A1 y1 A2 y2 = 25.37mm
Ai
A1 A2
习题参考解答或提示
二次投影法
力F 在三个轴上的投影分别为
Fx = F sin γcos φ Fy = F sin γsin φ Fz = F cos γ
F = Fx2 + Fy2 + Fz2
cosa = Fx F cos b = Fy F cos g = Fz F
§4-2 力对轴之矩
力对轴之矩(N·m):度量力使物体绕轴的转动效应
理论力学——第4章 空间力系
MO (F )z
M z (F)
例题2 解:
已知:F、 a、b、、
求: MO(F)
i jk
MO(F) r F x y z
xa
Fx Fy Fz
yb
z0
Fx F cos sin Fy F cos cos Fz F sin
MO (F ) Fbsin i Fasin j (Fbsin sin Fasin cos ) k
MO (F )z
M z (F)
MO (F) 2OAB
Mz(F) = MO(Fxy) = ±2 △Oab
OAB cos Oab
MO (F) cos M z (F)
MO (F )z M z (F )
Mz(F)
(x,y,z))
Fxy
M O M O
(F (F
)x )y
M x(F) M y (F)
cos(M , j) M y
M
cos(M , k) M z M
平衡条件
n
Mi 0
i 1
平衡方程
M ix M iy
0 0
M iz
0
4-5 空间任意力系向一点简化
z
F2
BA O C
M3
F1
F2
M2
y
z
M1
F1
O
y
z
MO
O
FR
y
x
F3
x
F3
x
F1 F1 , F2 F2 , , Fn Fn
M1
A
解:取曲杆为研究对象
a
FA
z
FA
y
z
Fx 0,
FDx 0
B
M y (F ) 0, FAz a M 2 0
第4章空间力系

FRy Fy
FRz Fz
cos FRx
FR
cos FRz
2、空间汇交力系的平衡条件
FR
cos FRy
FR
FRx Fx 0
FRy Fy 0
FRz Fz 0
光滑球铰链 A
Fz
Fy Fx
Fz
Fy Fx
例4-1 图示为用起重
杆吊起重物。起重杆的
A端用球铰链固定在地 面上,而B端则用绳CB 和DB拉住,两绳分别
上面三式联立,解得 F1=F2=3.54 kN FA=8.66 kN
例 :结构如图所示,杆重不计,已知力P, 求两杆的内力和绳BD的拉力。
z D
z D
C
F3
C
A
B
x
P
y A
y F2
F1
B
x
P
§4-2 空间力对点之矩和对轴之矩
一、力对点之矩
矢量
r
的矩
O
A
Mo( A) r A, Mo r A sin
i1
i1
z
M
Fz
FR
Mz
Fy
y
y
x
Fx
x
Mx
My
2、空间任意力系的简化结果分析
空间任意力系 {F1, F2,, Fn} {FR, MO} 简化结果
1、 FR 0, MO 0
平衡
2、FR 0, MO 0
合力
3、FR 0, MO 0 4、FR 0, MO 0
合力偶 ?
(1) FR 0, MO 0, FRMO
1、空间任意力系的简化
Fn An
o A2
A1 F2
F1
Fn'
力学第四章空间力系

§4-3 空间任意力系的平衡方程
解 取折杆为研究对象,画受力图如图所示,选直角坐 标系0xyz,列平衡方程
Fx = 0
FOx = 0
Fy = 0
FOy = 0
Fz = 0
FOz F = 0
Mx F = 0 MOx Fb = 0
§4-3 空间任意力系的平衡方程
平衡基本方程
空间任意力系平衡的充分必要条件:
各力在各坐标轴上的投影代数和分别等于零; 各力对各坐标轴的矩的代数和分别等于零
即:
Fx = 0
Fy = 0
Fz = 0
MxF = 0 M y F = 0 Mz F = 0
§4-3 空间任意力系的平衡方程
§4-3 空间任意力系的平衡方程
例4-5 用空间平衡力系的平面解法重解例4-4 解 重物匀速上升,鼓轮作匀速转动,即处于平衡姿态。取鼓轮为研究 对象。将力G和Q平移到轴线上,分别作垂直平面、水平平面和侧垂直
平面(图a、b、c)的受力图。
a)
c) b)
§4-3 空间任意力系的平衡方程
由(图a、b、 c),列平衡方程。
§4-2 力对轴之矩
力对轴之矩(N·m):度量力使物体绕轴的转动效应
M z (F ) = M O (Fxy ) = Fxyd
结论:力对某轴之矩是力使物体绕该轴 转动效应的度量,其大小等于力对垂直 于某轴平面内力对O点(即某轴在该面 的投影点)之矩。
力对轴之矩的符规定:
§4-2 力对轴之矩
例4-1 图示力F作用在圆轮的平面内,设力F作用线距z轴 距离为d。试计算力F对z轴之矩。
符号规定:从投影的起点到终点的方向与相应坐标轴 正向一致的就取正号;反之,就取负号。
第4章空间力系

12
理论力学电子教案 C 机械工业出版社
力矩矢旳模等于力旳大小与矩心到力作用线垂直 距离旳乘积,即
mO (F ) F d 2OAB面积
假如r 矩心O到力F作用点A旳矢径,则矢积旳模等 于三角形OAB面积旳两倍,其方向与MO(F)旳方向相同, 故力矩矢也能够表达为
力对//它旳轴旳矩为零。 即力F与轴共面时,力 对轴之矩为零。
z
Fz
O
xy
dA
F
B
Fxy
14
理论力学电子教案 C 机械工业出版社
力矩关系定理
[证]任取一点O,并过O点作
z MO(F)
O
xy
B
F
A
B
A Fxy
一轴z,力F对点O之矩MO(F) 垂直于 所在平面,其模为
M O (F ) 2ΔOAB
力F对z轴之矩为
即合力在某一坐标轴上旳投影,等于力系中全部各
力在同一轴上投影旳代数和,这就是空间汇交力系旳合
力投影定理。
合力FR旳大小和方向余弦分别为
FR FR2x FR2y FR2z ( Fx )2 ( Fy )2 ( Fz )2
cos FRx Fx ,
FR
FR
cos FRy Fy ,
FR
假设方向相反,即两杆均受压力。
11
理论力学电子教案 C 机械工业出版社
§ 4.2 力对点旳矩与力对轴旳矩
4.2.1 力对点旳矩 空间力系中,力对于某一点旳作用效应不但与力
矩旳大小和转向有关,还与力矩平面旳方位有关。 所 以空间力对点旳矩必须用力矩矢MO(F)表达。
B
哈工大理论力学第四章
∑F =0
z
FOA sin 45 −P = 0
(拉) F = −1414N F = F = 707N OA OB OC
例4-4 已知: F, l, a,θ 求: x ( F ) , My ( F ) , Mz ( F ) M 解:把力 F 分解如图
Mx F = −F ( l + a) cosθ My F = −Fl cosθ
∑F = 0
FA = 8.66kN
例4-3 已知:P=1000N ,各杆重不计. 求:三根杆所受力. 解:各杆均为二力杆,取球铰O, 画受力图。
∑F =0 ∑F =0
x
y
FOB sin 45 − FOC sin 45 = 0
− FOB cos 45 − FOC cos 45 − FOA cos 45 = 0
空间平行力系的平衡方程
∑F = 0 ∑M
z
x
=0
பைடு நூலகம்
∑M
y
=0
2.空间约束类型举例 2.空间约束类型举例 3.空间力系平衡问题举例 3.空间力系平衡问题举例
§4–6 重 心 6
1.计算重心坐标的公式
P ⋅ xC = P ⋅ x1 + P2 ⋅ x2 + .... + Pn ⋅ xn 1 = ∑ Pi ⋅ xi
M = rBA × F
2、力偶的性质 (1) (1)力偶中两力在任意坐标轴上投影的代数和为零 . (2)力偶对任意点取矩都等于力偶矩,不因矩心的改 力偶对任意点取矩都等于力偶矩, 变而改变。 变而改变。
M O ( F , F ′) = M O ( F ) + M O ( F ′) = rA × F + rB × F ′
理论力学 第四章 空间力系

第四章空间力系本章将研究空间力系的简化和平衡条件。
工程中常见物体所受各力的作用线并不都在同一平面内,而是空司分布的,例如车床主轴、起重设备、高压输电线塔和飞机的起落架等结构。
设计这些结构时,需用空间力系的平衡条件进行计算。
与平面力系一样,空间力系可以分为空间汇交力系、空司力偶系和空间任意力系来研究。
§4-1 空间汇交力系1.力在直角坐标轴上的投影和力沿直角坐标轴的分解若已知力F与正交坐标系Oxyz三轴间的夹角分别为α、β、γ,如图4-1所示,则力在三个轴上的投影等于力F的大小乘以与各轴夹角的余弦,即X=cosαY=cosβ (4-1)Z=cosγ当力与坐标轴Ox、Oy间的夹角不易确定时,可把力先投影到坐标平面Oxy上,得到力,然后再把这个力投影到x、y轴上。
在图4-2中,已知角γ和,则力在三个坐标轴上的投影分别为X=sinγcosY=sinγsin (4-2)Z=cosγ若以、、表示力F沿直角坐标轴x、y、z的正交分量,以i、j、k分别表示沿x、y、z坐标轴方向的单位矢量,如图4-3所示,则图4-2=++=X i+Y j+Z k (4-3)由此,力在坐标轴上的投影和力沿坐标轴的正交分矢量间的关系可表示为:=X i,=Y j,=Z k (4-4)如果己知力F在正交轴系Oxyz的三个投影,则力F的大小和方向余弦为=cos(,i)=cos(,j)= (4-5)cos(,k)=例4-1图4-4所示的圆柱斜齿轮,其上受啮合力的作用。
已知斜齿轮的齿倾角(螺旋角) β和压力角α,试求力沿x、y和z轴的分力。
解:先将力向z轴和Oxy平面投影,得Z=-sinα=cosα再将力向x、y轴投影,得X=-sinβ=-cosαsinβY=-cosβ=-cosαcosβ则沿各轴的分力为=-cosαsinβi,=-cosαcosβj,=-sinαk式中i、j、k为沿x、y、z轴的单位矢量,负号表明各分力与轴的正向相反。
理论力学第四章空间力系

→
→ →
→
→
→
→
→
→
AB × F ')
→
力偶矩矢与矩心无关 力偶矩矢无须确定矢的初端位置,故为自由矢量。 力偶矩矢无须确定矢的初端位置,故为自由矢量。 自由矢量
21
结论: 结论:
空间力偶对刚体的作用效果决定于下列三个因素: 空间力偶对刚体的作用效果决定于下列三个因素: ①力偶矩的大小 M = Fd = 2 A∆ABC ②力偶矩的方位——与力偶作用面法线方向相同 力偶矩的方位——与力偶作用面法线方向相同 转向——遵循右手螺旋规则 ③转向——遵循右手螺旋规则
xi
yi
——空间汇交力系的平衡方程 ——空间汇交力系的平衡方程
8
已知: CE=EB=DE; [例1] 已知: 物重P=10kN,CE=EB=DE;θ = 30 ,
0
求:杆受力及绳拉力 解:画受力图如图, 画受力图如图, 列平衡方程
∑F
x
=0
F sin 45o − F sin 45o = 0 1 2
→ → → → → → → →
= [ m O ( F )] x i + [ m O ( F )] y i + [ m O ( F )] z k
[mO (F )]x = yFZ − zFy [mO (F )]y = zFx − xFZ [mO (F )]z = xFy − yFx
→ → → → → →
[mO (F )]x = yFZ − zFy [mO (F )]y = zFx − xFZ [mO (F )]z = xFy − yFx
→ →
→ → → → → →
M x ( F ) = yFz − zF y M y ( F ) = zF x − xFz M Z ( F ) = xF y − yFx
第四章 空间力系

9
4.3.2 空间力偶系的合成与平衡条件
空间力偶系可以合成,得到一个合力偶, 空间力偶系可以合成,得到一个合力偶,合力偶的矩矢 等于各分力偶矩矢的矢量和。 等于各分力偶矩矢的矢量和。
M R = M1 + M 2 + L + M n = ∑ M i
i=1 n
M2
MR
写成投影形式
M Rx = M x1 + M x 2 + L + M xn = ∑ M xi
M z ( F ) = M O ( Fxy ) = ± Fxy ⋅ d
z F
b
z Fz
B
a
Fx A
F
Fy F xy
O
O
y
z y a
x
y Fy Fxy
6
d
x
b'
a'
F xy x
Fx
b
其正负号按右手螺旋法则确定, 其正负号按右手螺旋法则确定,即以右手四指的绕向表 示 力使物体绕轴转动的方向,大姆指指向与z轴一致时为 力使物体绕轴转动的方向, 正,反之为负。 反之为负。 通过分析得到力对轴之矩等于零的两种情况: 通过分析得到力对轴之矩等于零的两种情况: 力与轴相交, (1) 力与轴相交,即 d=0 ; 力与轴平行, (2) 力与轴平行,即
Fxy=0 。两种情况综合起来,即当力与轴在同一平面时,力 两种情况综合起来,即当力与轴在同一平面时,
对该轴之矩等于零。 对该轴之矩等于零。
7
4.3 空间力偶
4.3.1 力偶矩以矢量表示——力偶矩矢 力偶矩以矢量表示——力偶矩矢 ——
如图所示的空间力偶 (F,F' ) 对于任一点的矩可表示为 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A
B O D
C
W
解:取节点O为研究对象,其受力如图所示。
建立坐标系Oxyz
Fx 0
FBO sin 30 FCO sin 30 0
Fy 0
FBO cos30 FCO cos30 FAO sin 30 0
Fz 0
FAO
FAO cos30 W 0
FR FR '2 FR '2 FRz x y
2
( FX ) 2 ( FY ) 2 ( FZ ) 2
主矢方向
X ,cos Y ,cos Z cos
R' R' R'
2 2 2 M Ox M Oy M Oz
主矩大小: M O
主矩方向: M Oy M Ox M Oz cos ' , cos ' , cos ' MO MO MO
力对于任一点之矩矢在通过该点的任一轴上的投影 等于力对于该轴之矩,这便是力矩关系定理。
3-3 空间力偶系
一.力偶矩的矢量表示 空间力偶对刚体的转动效应(大小和转 向,力偶作用面的方位)用力偶矩矢来度量。
M
F
M rF
力偶矩矢的大小:
r
F’
r F Fr sin a
力偶矩矢的方向: 右手法则
2 2
y
F y F sin sin Fz F cos
例3-1 沿图示长方体的对角线AB有一力F作用, 其值为F=500N,求该力在三个坐标轴上的投影。
z B 5m F O x 3m A y 4m
解:采用二次投影法。由图中几何关系可知
sin γ cos γ 2 4 3 , cosθ , sin θ 2 5 5
S
yd S S
其中S表示平板的面积。
重心的确定方法
实验法 悬挂法
称重法
简单图形的计算方法 分割法 对称性
负面积法
求出图示两种平面图形(阴影部分)的重心坐标。RBiblioteka yRy l x
r O
r
x
O r
l
R
y
r O l
r
x 解:图形对称于x轴 而
2
yC 0
2
r l rl xC 2 2 2 2 R r R r
的投影对于这个平面
与该轴的交点的矩.
M Z ( F ) M o ( Fxy )
从z轴的正向观看,力使刚体绕z轴的 转向逆时针时取正号,反之取负号
2S A'B 'O
三.力矩关系定理
力对点之矩矢
M o ( F ) (yFz zFy )i (zFx xFz )j (xFy yFx )k
第三章 空间力系
第四章 空间力系
3-1 空间汇交力系 3-2 力对点的矩和力对轴的矩
3-3 空间力偶
3-4 空间任意力系的简化 3-5 空间任意力系的平衡 3-6 重心和形心
§3-1空间汇交力系的合成与平衡
一.力在直角坐标轴上的投影
(1)直接投影法:已知力及其与三个轴正 向间所夹的最小角 z
M
O
M 0 R // M
M 0
力螺旋 o
FR
M o
力螺旋 o
FR
M FR
oo
F M R M O O M FR
FR
力系向任一点 O 简化的结果 主矢 主 矩
MO 0
力系简化的 最后结果
说
明
FR 0
3
FR 0
M 0 FR M
FR
M o
MO
FR
FR
FR
O’
oo
M FR
M FR
如果一个力与一个力系等效,称该力是这个 力系的合力!
合力 o
合力对空间任一点的矩等于力系中各力对同一点 的矩的矢量和!——空间力系的合力矩定理
4 FR 0 5 FR 0
F3 2 2 P
§3-6
一.
平行力系中心与重心
平行力系中心的存在和唯一性。
平行力系中心
Fi
ri
ri
F1
rC
FR
Fn
O
rC
C
rC
Fr
i 1
n
i i
FR
二.
物体的重心
z
Fi
rC
Pr
i 1
n
i i
P
ri
ri
F1
FR
Fn
xC
Px
二、空间力偶的等效条件
力偶等效定理:
作用面平行的两个力偶,若其力偶矩大小相 等、转向相同,则两力偶等效。
力偶矩矢为自由矢量,它可以在刚体上自由平移 力偶矩矢为一自由矢量
三. 空间力偶系的合成与平衡 1 .空间力偶系的合成
M M1 M 2 M n M i ( M i x )i ( M i y ) j ( M i z )k
MO 0 MO 0
平衡 合力偶 合力
平衡力系 主矩与简化中心的 位置无关 合力作用线通过 简化中心 合力作用线离简化中心 O 的距离 d
MO FR
MO 0
FR ⊥ M O
合力
FR 0
FR // M 0 MO 0
力螺旋
力螺旋的中心轴通 过简化中心 力螺旋的中心轴离简化
FR 与 M 0
i 1
n
i i
P
x
O
rC
C
rC
yC
Py
i 1 i
n
i
P
y
zC
Pz
i 1
n
i i
P
如果物体是均质的,变为
xC
V
xdV V , yC
V
ydV V , zC
V
zdV V
其中V表示物体的体积。
如果物体是均质等厚平板,重心坐标为
xC
S
xd S S , yC
二.
空间汇交力系的合成与平衡
空间汇交力系的合成
F2 F 3 F1 O F4
FR
FR
=
O
FR F i
FR ( Fix i Fiy j Fiz k )
FR Fix i Fiy j Fiz k
FR FRx i FRy j FRz k
固定端约束
A
A
空间: A
A 平面: X A M A
YA
二.简化结果分析
1
FR 0
M 0
FR
O
M
O
O
M
M o
若简化中心为O1点,如何?
2
FR 0
M 0
FR
FR
O
O
O
M
FR
M o
若简化中心为O1点,如何?
合力偶矩矢的方向余弦:
M cos
M My cos M Mz cos M
x
2.空间力偶系的平衡
空间力偶系平衡的必要与充分条件:
力偶系中各力偶矩矢的矢量和等于零。
M
i 1
n
i
0
M
i 1 n n ix
平衡方程:
0 0 0
B 5m F O x 3m A y 4m z
因此,力F在坐标轴上的投影分别为
2 4 Fx F sin cos 500 282.8 N 2 5
Fy F sin sin 500 2 3 212.1 N 2 5
2 Fz F cos 500 353.6 N 2
力对通过该点的轴之矩
M x ( F ) yFz zFy
M y ( F ) zFx xFz
M z ( F ) xFy yFx
[ Mo ( F )]x M x ( F ) [ Mo ( F )]y M y ( F )
[ Mo ( F )]z M z ( F )
已知: F、P及各尺寸 求:各杆内力
解:研究对象,长方板,
M F 0
AB
P F6 2 M AE F 0
M F 0
AC
F5 0
F4 0
M F 0
EF
M F 0
FG
F1 0
M F 0
BC
F2 1.5P
M O (F )
F
O
Mo (F ) r F
r
z
M o (F )
o x
α r A
F
B
力矩矢的大小:
r F Fr sin 2S ABO
y
力矩矢的方向: 右手法则
力矩矢与o点的选择有关!,它是定位矢量
在直角坐标系下的力矩矢的解析表达式
Mo (F ) r F
i 1 i 1 i 1 i 1 n n n n
M x M x M x
M y M y M y
M z M z M z
合力偶矩矢的大小:
M ( M x ) 2 ( M y ) 2 ( M z ) 2
空间汇交力系的平衡
FR F i 0
空间汇交力系的平衡方程: