动态定位精度测试方法及实验研究
rtk测量设计方案

RTK测量设计方案1. 概述RTK(Real-Time Kinematic)即实时动态差分定位技术,是一种高精度、高效率的测量技术,广泛应用于地理信息系统、地理调查、土地测量等领域。
本文档旨在提供一个RTK测量设计方案的详细指南,包括硬件设备选购、测量流程设置和数据处理方法等。
2. 硬件设备选购RTK测量涉及到的硬件设备包括基准站和测量仪器。
在选择硬件设备时,需要考虑以下几个因素:1.基准站:选择具备较高精度和稳定性的基准站,以确保RTK测量系统的可靠性。
2.测量仪器:选择支持RTK测量的GNSS测量仪器,确保测量仪器能够与基准站进行实时差分定位。
3. 测量流程设置RTK测量的流程主要包括以下几个步骤:3.1 基准站设置在RTK测量前,首先需要设置基准站。
具体设置步骤如下:1.选择一个合适的测量点作为基准点,确保基准点具备良好的天线观测条件和接收卫星的能力。
2.将基准站的接收器与天线进行连接,并将天线安装在基准点上。
3.启动基准站接收器,进行观测和数据记录。
3.2 测量仪器设置接下来,需要设置测量仪器并与基准站进行通信。
具体设置步骤如下:1.将测量仪器与基准站进行蓝牙或无线电通信连接。
2.在测量仪器上选择RTK模式,并设置测量参数,如RTK工作模式、观测间隔等。
3.3 测量操作在进行实际测量时,需要注意以下几点:1.确保测量仪器与基准站的通信正常。
2.在测量前,进行基线测试,以确定测量的基准位置和精度。
3.将测量仪器从基准站接收的差分数据传输到移动站,实现实时差分定位。
4.进行移动站的观测和测量操作。
4. 数据处理方法完成RTK测量后,需要对测量数据进行处理,以获得最终的测量结果。
常用的数据处理方法有以下几种:1.实时差分定位解算:将移动站接收到的差分数据与基准站观测数据进行差分运算,实现实时差分定位。
2.数据后处理:将测量数据导入后处理软件,进行数据的修正、滤波和平差等处理,以获得更精确的测量结果。
RTK-GPS动态定位精度测试研究
Ke r s:RTK— y wo d GPS;d n mi st n n y a c po ii i g;a c r c e t o c u a y t s ;ba k r u d n ie; v me tsmu a in e i me t c g o n o s mo e n i lto qu p n
whc r i e rmo e n ,sn s i lmo e n n ic a v me t ih a e ln a v me t i u oda v me ta d cr ulrmo e n .Po i o i g a c r c n fe t fRTK- st n n c u a y a d efc so i GPS un e h e v me tp tens a e t se d r tr e mo e n a tr r e td. Te tr s ls i diae t a h e t meh ds d sg e a ke t s e u t n c t h tt e ts to e i n d c n ma he
tn igtea piain o K- S i y a cmo i r go re—sae e gn e n ulig n au a ia・ e dn h p l t fRT ・ n d n mi nti f ag - c l n ie r gb i n sa d n trldss c o GP on l i d -
用 。例如 , 苏通 大 桥 成 桥 检测 实验 中就 同时 采 取 了 这 两种 动态变 形监 测 方 法 , 用 测 量 机 器 人 测 量 桥 采
大桥进行成桥检测之前 , 由于大桥管理单位对 R K T—
测试结果表明设计的rtkgps精度测试方法能比较直观地了解rtk大地测量与地球动力学28精度进行了测试说明了rtkgps技术的先进性和可靠性对rtkgps的推广应用具有一定的积极意随着rtkgps技术的发展和完善特别是精度和采样频率的提高以及软件部分的进步用于建筑物动态监测和振动特征分析的可能性也成为现实
数控机床动态性能测试与评估

数控机床动态性能测试与评估数控机床是现代制造业中的重要设备,其动态性能的好坏直接影响到工件加工的精度和质量。
为了确保数控机床在工作过程中的稳定性和准确性,必须对其动态性能进行测试与评估。
本文将介绍数控机床动态性能测试的方法和评估的相关指标,以期提供参考和指导。
一、测试方法数控机床的动态性能测试主要包括加速度测试、速度测试和定位精度测试三个方面。
下面将详细介绍这三个测试方法。
1. 加速度测试加速度测试旨在评估数控机床在快速启停过程中的稳定性能。
测试时,通过设置不同的加速度值,使数控机床在规定时间内加速至最高速度,然后再减速停下来。
通过测量加速度过程中的振动情况和减速停顿过程中的位置误差,可以评估机床的加速度性能。
2. 速度测试速度测试是评估数控机床在运行过程中的速度变化和稳定性能。
测试时,通过设置不同的速度值,使机床在规定的时间内运行一段距离。
通过测量运行过程中的位置误差和速度波动情况,可以评估机床的速度性能。
3. 定位精度测试定位精度测试是评估数控机床在停下来后,重新启动时的位置回归能力。
测试时,通过将机床移动至一个位置,然后停下来,再重新启动,通过测量重新启动后的位置与目标位置之间的偏差,可以评估机床的定位精度。
二、评估指标数控机床的动态性能评估需要考虑多个指标,下面将介绍几个常用的评估指标。
1. 加速度度量指标加速度的度量指标主要包括最大加速度、平均加速度和加速度时间。
最大加速度表示在加速过程中达到的最高加速度值,平均加速度表示加速过程中的平均加速度大小,加速度时间表示加速过程所需的时间长度。
2. 速度度量指标速度的度量指标主要包括最大速度、平均速度和速度波动。
最大速度表示运行过程中达到的最高速度值,平均速度表示运行过程中的平均速度大小,速度波动表示速度变化的波动情况,波动越小表示机床的速度稳定性越好。
3. 定位精度度量指标定位精度的度量指标主要包括位置误差和重复定位精度。
位置误差表示机床在停下来后重新启动时与目标位置之间的偏差大小,重复定位精度表示机床在多次停下来后重新启动时的位置回归能力。
GPS导航产品的验证内容和测试方法
GPS导航产品的验证内容和测试方法GPS导航产品是现代汽车市场中的重要配置之一。
与传统的地图导航不同,GPS导航产品基于全球卫星定位系统(GPS)定位技术,具有更为精准的位置信息定位能力,同时能够提供更多个性化的服务。
但在实际使用过程中,GPS导航产品也会存在一些问题,如精度不高、数据更新不及时等,因此需要进行验证和测试。
验证内容:1.精度测试:GPS导航产品的一个重要指标就是定位精度。
精度测试可分为静态精度和动态精度两种,其中,静态精度测试主要是针对固定场景下的定位数据的准确性进行验证,而动态精度测试则是基于运动场景对于导航数据变化的跟踪与测试。
2.导航路线测试:GPS导航产品的核心功能是提供线路导航,因此对于其导航路线的准确性验证显得尤为重要。
导航路线测试可分为室内测试和户外测试两种,其中,室内测试主要是针对不同建筑物、道路标识等室内属性进行测试,而户外测试则是在不同路况、气候条件下,测试导航路线准确度。
3.数据更新测试:数据更新直接影响到GPS导航产品的使用效果,因此需要对于数据更新频率、数据覆盖范围进行测试。
测试方案既包括了定期的自动更新,也包括了用户手动更新数据的测试。
4.功能测试:此项测试是对于一些GPS导航产品提供的其他服务进行评估测试,如语音导航、音乐播放、高速收费站、加油站等服务的实际效果测试。
测试方法:1.模拟测试:模拟测试主要是利用模拟场景进行GPS导航产品的性能测试。
通过模拟静态或动态测试场景,验证GPS导航产品的定位精度、导航路线准确度、数据更新等性能。
2.实验室测试:实验室测试主要是利用专业的设备对于GPS导航产品进行参数测试。
这些测试设备会模拟不同的定位场景,如不同经纬度、不同高度、不同速度等等。
通过实验室测试,可以得到GPS导航产品的定位精度、定位延迟、实时性、精度计算方法等数据。
3.外场测试:外场测试是进行GPS导航产品性能测试的一个重要方式。
通过使用不同的GPS导航产品进行实际的导航测试,在不同的场景中测试类似路况、天气对于导航精度的影响等。
北斗接收机动态定位精度测试与分析

北斗接收机动态定位精度测试与分析摘要:北斗卫星导航系统属于无源定位系统,北斗接收机最为该系统的重要组成部分,主要负责对卫星信号的跟踪、观测量的提取和定位结算,其动态定位精度直接影响了接收的性能。
基于此,本论文对北斗接收机动态定位的精度测试方式进行了详细的研究和分析。
关键词:北斗接收机;动态定位;精度测试一、北斗卫星导航系统与北斗接收机1、北斗卫星导航系统北斗卫星导航系统,简称北斗系统,是我国拥有自主知识产权的卫星导航系统。
北斗系统与美国的GPS、欧盟的Galileo系统基本相似,属于卫星无线电导航服务,可具有高精度、高可靠定位,以及导航和授时服务的功能,是国家经济发展、社会发展和国家安全建设中不可或缺的一项空间信息基础设施。
北斗系统在建设的过程中,选择了“先区域、后全球”的“三步走”战略。
第一步,在2000年,将北斗系统的实验系统初步建设成功;第二步,即在2012年,完成北斗系统对中国、以及中国周边地区的服务建设;第三部,即2020年全面建成北斗卫星导航系统。
截止到2012年12月28日,该系统已经开始向亚太区域提供服务。
北斗系统在定位精度上,无论是水平精度,还是高程精度,均已达到了10米,并且测速精度已经达到0.2米/秒,授时精度为单向50纳秒[1]。
目前,北斗卫星导航系统的服务性能已经基本与GPS保持相当的水平,完全可以独立提供导航、定位、授时等服务。
2、北斗接收机北斗卫星导航系统主要包括空间段、运行与控制段、用户段三部分组成。
该系统在具体运行的过程中,空间段的卫星负责向地面发射导航信号,地面监控部位接收到空间段发射的导航信号之后,并据此对卫星运行轨道进行确定,之后将卫星轨道信息注入卫星,卫生则在下行频点上对其运行的信息进行转播;最后用户设备通过对卫星信号的接受,获得相关的参数,并对用户与卫星之间的距离信息进行推算,进而将用户的空间位置信息进行精准确定。
北斗接收机正是位于该系统用户段上,主要由接收天线、射频前端、数字基带信号处理、导航解算四个部分构成。
高精度GPS动态测量及质量控制

数据采集与处理方法
高精度GPS动态测量数据采集通常采用专业的测量设备,如GPS接收机。在采 集过程中,需要选择合适的坐标系和投影方式,以确保数据处理的准确性。数 据处理主要包括数据预处理、基线解算、网平差等步骤。数据预处理主要是对 原始数据进行滤波和剔除噪声;基线解算是对两台接收机所采集的数据进行差 分处理,以获得相对位置和速度;网平差则是通过最小二乘法等方法,对各基 线进行整体平差,最终得到高精度的测量结果。
研究方法
本研究将采用实验方法进行高精度温度控制及PTF测量研究。首先,设计一套 精细的温度控制系统,包括加热元件、传感器和控制器等,以实现对温度的高 精度控制。然后,在该温度控制系统中进行实验,通过改变输入温度并记录系 统的输出响应,以获得系统的传递函数。同时,采用现代控制理论方法设计控 制器,以实现高精度温度控制。最后,根据实验数据对比分析高精度温度控制 性能和PTF测量的准确性。
PTF测量
PTF测量是一种用于描述系统动态特性的方法,常用于测量和描述系统的传递 函数。传递函数是一种描述系统输入与输出之间关系的数学模型,反映了系统 对输入的响应特性。PTF测量可以通过实验方法和理论建模两种途径实现。实 验方法主要是通过实验测试系统在各种不同输入下的输出,然后根据实验数据 拟合出传递函数;理论建模则是通过建立系统的数学模型,然后推导出传递函 数。
高精度温度控制与PTF测量相结 合的应用研究
高精度温度控制与PTF测量相结合的应用研究在许多领域都有重要的实际意义。 例如,在化学反应过程中,精确的温度控制可以影响化学反应的速率和产物的 性质,而PTF测量则可以描述反应系统的动态特性,从而帮助实现更加精确的 温度控制。此外,在能源转换领域,高精度温度控制和PTF测量都对于提高能 源利用效率和优化能源转换过程具有重要的指导作用。
gnss设计实验报告
gnss设计实验报告GNSS设计实验报告GNSS(全球导航卫星系统)是一种利用卫星信号进行地面定位的技术,它已经被广泛应用于航空、航海、车辆导航和地理信息系统等领域。
为了验证GNSS 系统的性能和精度,我们进行了一系列的实验,并在本报告中进行了详细的记录和分析。
实验一:静态定位精度测试我们在一个空旷的开阔地区选择了几个固定的测量点,分别使用GNSS接收机进行定位,并记录了每个点的经纬度坐标。
通过对比实际测量值和接收机给出的定位结果,我们发现GNSS系统的静态定位精度非常高,定位误差在几米以内。
实验二:动态定位精度测试在车辆上安装了GNSS接收机,并进行了一段距离的行驶。
通过对比实际行驶路线和接收机给出的定位结果,我们发现GNSS系统在动态环境下的定位精度也非常高,定位误差在十米以内。
实验三:多路径效应测试我们在城市中心和郊区进行了多路径效应测试。
通过对比城市中心和郊区的测试结果,我们发现城市中心的多路径效应更加明显,定位误差更大。
这表明在复杂的城市环境中,GNSS系统的定位精度可能会受到影响。
实验四:卫星遮挡测试我们在建筑物高楼和密集树木下进行了卫星遮挡测试。
通过对比不同环境下的测试结果,我们发现在遮挡物较多的环境下,GNSS系统的定位精度会受到影响,甚至可能无法正常工作。
通过以上一系列的实验,我们对GNSS系统的性能和精度有了更深入的了解。
虽然GNSS系统在大部分情况下具有很高的定位精度,但在复杂环境下可能会受到影响。
因此,在实际应用中,需要结合实际情况,采取相应的措施来保证GNSS系统的定位精度和可靠性。
希望我们的实验报告能对GNSS系统的设计和应用提供一定的参考和帮助。
GPS动态监测试验与精度分析
21 0 1年 1 0月
测 绘 与 空 间地 理信 息
G OMAT C & S AT A NF MA l E HNoL E IS P IL oR T ON T C oGY
Vo . 4, . 1 3 No 5
Oc . 0 1 t ,2 1
GP S动态 监 测试 验 与精 度 分 析
mo e T v l ae t e a c r c fGP y a c mo i r g, c o d n o t e e p rme to S d n mi n tr g t i a e t - r . o e a u t h c u a y o S d n mi nt i o n a c r i g t h x e i n fGP y a c mo i i ,h sp p ri r on n o
Ex e i e ta d Ac u a y An l sso p rm n n c r c ay i fGPS Dy a i o io i g n m c M n t rn
LU Z e I h n—c e g h n
( . 1 ooia T a o a gi h a gAuo o u go , iz o 4 0 6 C ia No2 5Gelgcl em f Gu n x u n tn mo sRein Lu h u55 0 , hn ) Z
刘 振 承
( 西壮族 自治区二一五地质队 , 西 柳 州 5 50 ) 广 广 4 06
摘 要 : 由于 G S定位精 度的不断提 高, P 其在工程 变形监测 中得到 了越 来越 广泛的 应用。结合一 次动 态监测 实 验, 客观评价 了 G S的精度 , 文介 绍 了该试验 的 实施 方案及监 测 结果 , P 本 并通过 大量 实验 数据统计 分析 了此 次
高精度 GPS 动态定位及其精度分析

历元 410 500 550 630 710 828 870 1070 1310
GPS 载波相位存在整周模糊度, 在高精度 GPS 动态定位应用中存在两大问题, 一是确定初始整周
位解算, 而不需要额外的初始化过程。 在以上方法中, (1) (2) (3) 法在运动过程中出
模糊度, 二是在运动过程中周跳的修复。
现周跳时均需要重新初始化求模糊度, 实践中 (1)
确定 GPS 初始整周模糊度的方法及其特点如 下:
从图1及通过对解算数据的统计结果得出平面 上可达到1厘米左右的精度, 高程精度为平面的2~ 3 倍, 可达到2~ 3厘米的精度。
212 沪宁高速公路 GPS 动态定位试验数据 的解算分析
本试验一方面研究 GPS 动态定位在线路测量 中的应用情况, 另一方面通过与常规测量的比较来
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
数值, 将其取整, 这样便得一组更新的 X N ′, 这时再
按 (4) 式重新求 X C ″并计算其平差值中误差 rm s, 重
复上述步骤,
直到把所有的组合
(共有
(
r 3
)
组)
都
计算过为止, 最后取 rm s 最小且 PDO P 小于某一给
dd (rion) + N ij+ Ε dd 为测站A、B 对卫星 i、 j 的双差 Υ22载波相位观测值
GPS载波相位差分测量动态精度测试及评定方法
Absr c : et h ih p st nn c u ay o S c rirp a edfee t l au e n, o t se sa dts e t a t Du otehg o i o iga c r c f i GP are h s i rn i s me t h w o as s n ett a me r h
与实 际测量 过程 一样 。通 过 比较 定位 结果 与 已知轨
双天线 法 是在运 动体 上 安装二 台用户 接 收机 , 两接 收机 天线相 距一 定距 离 ,运 动过 程保 持不 变 。
迹即可获得定位精度。实物模拟的优点是对接收机 可 以进行较全面的考核 ,尤其是接收机的动态特性
可 进行 充分 测定 ,这是任 何方 法 、包 括过 去传 统的 光 测对 比法在 内都不具 备 。另外 对测 量精度 可进 行 有 限 的考核 。它 的问题 主 要是对 动态 精度 的考核 不 够 充分 ,这 与数 字模拟 法相 同,模 型误 差较 大 。
差分测定的点位作为真值,可应用于高精度的光学
仪器 、 导 雷达等 设备 测量 成果 的 比较和测 试 , 还 制 可进 行姿 态测 量等 。 正 是 由于 该 系统定 位精 度高 ,
在测量误差 已知情况下 ,可以较精确的确定 闭 合 差界 ,利 用此 误差 界可 以有 效判 定观测 是否 出现
粗 差 。但 是在 闭合 差处 理过程 中,部分 误差将 会 丢 失 ,丢失 的误 差主要 是相 关性 较 强的误 差分 量 :此
使得对系统本身动态定位精度 的测试工作非 常棘
手 。 目前 ,国 内还没 有系 统 的对于这 种 高精度 系 统
外,从闭合差分离出测量误差难度很大。
GPS-RTK测量方法研究与精度分析

GPS-RTK测量方法研究与精度分析Measurement Method and Precision Analysisof the GPS-RTK测绘与地理信息学院测绘工程张廷雷201003215李建章摘要RTK(Real Time Kinematic)是一种利用GPS载波相位观测值进行实时动态相对定位的技术。
RTK测量操作简便、自动化程度高、高效、方法灵活,较之于传统测量手段的众多优点,使其在城市建设、各类工程测量中越来越具有重要的作用和地位,但是,RTK 测量技术也受地形、卫星、电台、测区控制点分布、转换参数求取等各种因素的制约。
特别是所求转换参数的精度,在很大程度上直接决定了RTK测量结果的质量!本论文结合RTK定位技术的现状,论述了RTK测量原理、RTK定位技术的现状等,通过实验,验证分析了四种常用RTK测量模式及其精度,并在此基础上探究小范围内控制点不足的测区与周围控制点充足测区之间的坐标传递及转换方案,并探讨方案的可行性及精度,针对性提出了相应的操作流程及注意事项,分析了各方案的适用程度,进一步完善了现场特殊问题的应对方案,最后拟定相应的的数据处理及成果形成方案。
本论文讲了RTK定位技术的原理、 RTK误差来源及测量精度;陈述了复杂地形下影响RTK高程精度的因素和需要采取的相应措施;对常用四种RTK测量模式进行了探讨及精度分析;阐述了RTK定位技术的应用前景。
结合校内实验阐述了测量过程中遇到的问题,提出了不同境况RTK测量存在的问题和所采取的相关方法和手段。
最后对各种实测成果进行了概括论述,讲了通过实测得到的相关结论,主要包括:基准站安置到已知点和未知点以及现有控制点WGS84坐标是否已知四种情况下RTK测量精度分析、小范围内控制点不足的测区与周围控制点充足测区之间的坐标传递及转换方案可行性及精度。
关键词:GPS-RTK;测量模式;精度分析;影响因素AbstractRTK (Real Time Kinematic) is a real-time dynamic relative positioning technique using a GPS carrier phase observations. RTK measurement has the advantages of simple operation, high degree of automation, high efficiency, flexible, many advantages compared with the traditional methods, in the city construction, all kinds of engineering measurement has become more and more important role, however, the RTK measurement technique is also affected by topography, satellite,radio, a test area restricted distribution, transformation parameter staking various factors. Especially the transformation precision,quality largely determines the results of RTK measurements! In this paper, combining with the current situation of RTK positioning technology, discusses the principle of RTK measurement, RTK positioning technology of the status , through the experiment,verify the analysis of four kinds of commonly used RTK measurement-model and its accuracy, and on this basis to explore within a small range of control points of test area and control points around the adequacy measurement coordinate zone between the transfer and conversion scheme, and discusses the feasibility and accuracy of the scheme, put forward the corresponding operation process and the matters needing attention, and analyzed the application degree of each scheme, and further improve the program to deal with special problem son-site, finally, draws up the corresponding data processing and results in the formation of scheme.RTK principle, error source and the measuring accuracy of this thesis about the RTK positioning technology; representations over complex terrain factors influencing RTK height precision and corresponding measures need to be taken; on four kinds of common RTK measurement mode is analyzed and precision; application of RTK positioning technology. Combined with the experiment described in the measurement process, puts forward some methods have different circumstances RTK measurement problems and measures and means. At the end of the measured results is reviewed, about the relevant conclusions, obtained mainly includes: base station placement to the known and unknown point and the existing control point WGS84 coordinate is known to the four cases RTK measurement accuracy analysis, control measure and control points around the adequacy measurement coordinate zone between the transfer and conversion feasibility and accuracy is not enough small range KEYWORDS: GPS-RTK; Measurement model; Accuracy analysis; Influencing factors目录第一章绪论 (1)第一节引言 (1)第二节国内外研究现状 (4)第三节研究的背景及意义 (6)第四节研究的主要内容和目标 (8)第二章RTK定位技术概述 (10)第一节 GPS测量原理 (10)一、GPS系统组成 (10)二、GPS工作原理 (11)三、GPS误差来源及应对措施 (13)第二节 RTK测量原理及特点 (14)一、RTK工作原理 (14)二、求差法载波相位GPS原理及双差模型 (15)(一)求差法 (15)(二)双差模型 (16)三、RTK测量的技术特点 (17)第三节 RTK误差来源及处理措施 (19)一、RTK的误差来源 (19)二、影响因素处理措施 (20)第四节 RTK定位技术类型及应用前景 (22)一、常规RTK (22)二、网络RTK原理及分析对比 (23)三、基于CORS系统的网络RTK的应用前景 (25)第三章理论公式及验证方法讨论 (27)第一节 RTK定位结果精度验证方法及公式 (27)第二节实验总体设计 (28)一、静态控制网实验设计 (28)二、RTK实验设计 (29)第三节实验仪器 (30)一、静态测量及RTK测量仪器 (30)二、约束平差测边仪器 (30)第四章几种常用RTK模式下精度验证实验及分析 (32)第一节静态控制网测量 (32)一、GPS静态网建立 (32)二、GPS静态观测 (32)第二节控制点WGS84坐标已知时的精度验证分析 (35)一、基准站安置到已知点(模式一have84-y) (35)(一)实验方案及步骤 (35)(二)数据处理及精度分析 (36)二、基准站安置到未知点(模式二have84-n) (38)(一)实验方案及步骤 (38)(二)数据处理及精度分析 (38)第三节控制点WGS84坐标未知时的精度验证分析 (39)一、基准站安置到已知点(模式三no84-y) (40)(一)实验方案及步骤 (40)(二)数据处理及精度分析 (40)二、基准站安置到未知点(模式四no84-n) (41)(一)实验方案及步骤 (41)(二)数据处理及精度分析 (41)第四节同一工程转换参数合理利用问题 (43)第五节不同模式的综合分析 (45)总结 (47)致谢 (49)参考文献 (50)第一章绪论本章介绍了 GPS-RTK 定位技术的研究现状及其局限性,阐明了本文研究的背景和意义,确定了本文研究的主要内容和目标。
GPS准动态测量及精度分析

行 准 动 态 测 量 , 测 时 间 一 般 只 需 几 秒 钟 即 可 。在 移 动 过 观
求 解坐标 转换 参数所 使用 的已知控 制点 ( 常称作基 通 准点) 的精 度 、 度及 分布 状况 对坐 标转 换 参数 的求 解 质 密 量 有着 直接 影 响。 因此 , 所选 定 的基 准点 要求 精 度要 高 ,
01 l 02 。因 此 , 用 G S准 动 态 测 量 方 法 完 全 能 .5n 和 .5i n 采 P
太 远 ( m~ m左 右 )精 度 相对 较 高 的控 制 点 , 这 两 2k 5k 、 在
点 上 架 设 两 台 G S准 动 态 基 准 站 .然 后 其 它 流 动 站 G S P P
M 、 =/ -/ ± ≈孚 、
=.m +3 o9 0
接将 WGS4坐标 转 换成 地 方格 网坐 标 ( 8 即一 步法 )使用 , 哪 种转 换 方 法 取决 于 需要 的结 果 和 已知 点 的数 量 分 布 。 在 椭球 和地 图投影 信息 未知 且需 要将 G S测 量强 制附 合 P 到 地方 已有控 制 网情 况下 , 步法 是最 合适 的。 一 ( )野外 作业 方法 的选 择 。 3 由于 测 区内 已知控 制 点精 度 或分 布 的原 因 .若 求解 的测 区转换 参数 精度 不是 很好 ,则 可通 过 架设 两 台基 准 站 的方 法进 行适 当弥补 。具体 做法 为 : 野 外测 量时 , 在 首
mm: 近地 物点 间距 中误 差 不得 大 于 图上 04mm。成 图 邻 .
比 例 为 11 0 : 0 0时 , 根 点 点 位 中 误 差 为 03I, 物 点 点 图 .T 地 I
动态GPS(RTK)测量的精度分析
Precision Analysis of Kinematic GPS ( RTK) Survey
015
3001512
3001580
- 618 3134
G24 3 990 7431719 3 990 7431709
110 486 3031779 486 3031787 - 018
2841784
2841739
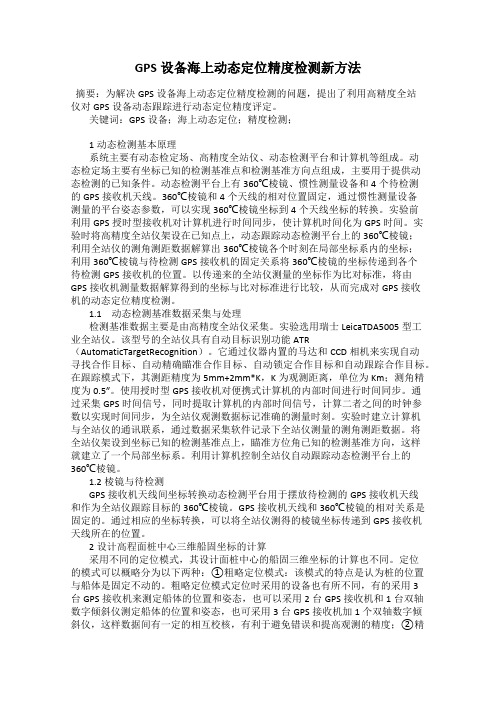
动态 GPS(RTK) 测量是以基准站为中心 ,其它流动站 (或称 为移动站) 相对基准站的相对定位 。GPS 使用的是 WGS - 84 坐 标系 ,而生产中往往使用的是国家坐标系或地方坐标系 (以下简 称测区坐标系) 。因为坐标系的不同 ,必须先求其转化参数 ,才 能得到所需坐标系的坐标 。测量时 ,基准站的一系列数据为已
cm 时 ,剔除和平均值相差较大的一个 ,剩余的取其平均值作为 最后观测成果并和静态观测值进行比较 ,见表 1 。
表 1 动态 GPS(RTK) 和静态 GPS 坐标差及动态 GPS(RTK) 高程与水准高程差 Table 1 Coordinate differences between kinematic GPS (RTK) and Static GPS and Height differences between GPS Height and leveling height
215
3421019
3411938
811 6104
G19 3 991 5161622 3 991 5161642 - 210 481 6801265 481 6801240
浅析动态GPS(RTK)精度检测控制
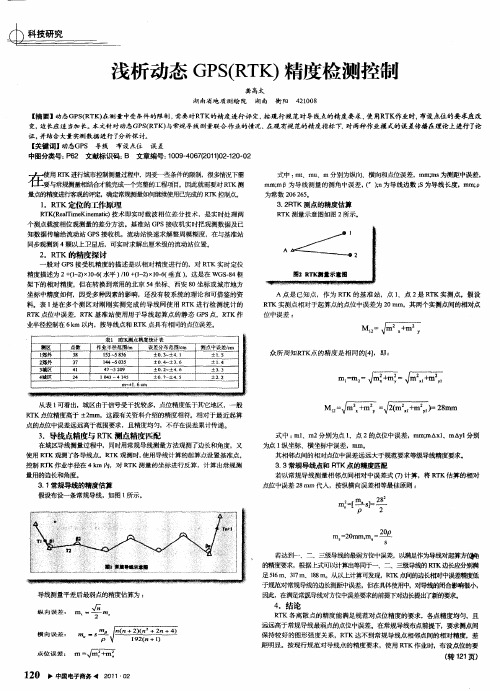
测点中谖差,m c ±l5 _ ±14 . ±3 3
±2 2 .
众所 周 知R K点 的精度 是 相 同的 [1 T 4,即 :
m 1 m := =
m=± r t 6 ca
舸
=
从表 1 可看出,城 区由于 信号受干扰 较多,点位精 度低 于其它地区 ,一般
R K点位精度高于  ̄ rm,这 跟有关资料 介绍的精度相 符。相 对于最 近起算 T 2 a 点的点位中误 差远远高于范 围要求 ,且精 度均匀,不存在误差 累计传递 。
浅 析动态 G SR K 精度检 测控制 P (T )
龚 高太
湖 南省地 质 测绘 院 湖 南 衡 阳 4 10 20 8
【 摘要】 动态G SR K 在测量中受条件的限制 , P (T ) 需要对R K T 的精度进行评定, 按现行规范对导线点的精度要求 , I T 作业时, 使 ̄R K 布设点位 的要求应改
变, 长应适 当加 长 本 文针 对动 态GP ( T  ̄常规 导 线测 量联 合 作 业的 情况 , 现 有规 范 的精度 指 标 对 两种作 业 模 式 的误 差传播 在 理论 上 进行 了 边 SR K) 在 论
证, 并结 合大量 实测 数据 进行 了分析探 讨。
【 关键词J动态GP 导线 布设点位 误 差 S 中图分类号: 6 文献标识码: 文章编号: 0 9 4 6 (0 1 210 0 P2 B 1 0 —0 72 1) —2 ・ 2 0
精度描述 为 2+12×06水平 )1 ( 2×06垂直 ) ( ) 1-(  ̄ / 0+1 ) 1—( - ,这是在 WGS8 框 一4 架下的相 对精 度,但在转 换到常用 的北 京 5 坐标 、西安 8 坐标 或城 市地方 4 O 坐标 中精 度如何 ,因受 多种 因素的影响 ,还没有 较系统 的理论 和可借鉴 的资
GPS设备海上动态定位精度检测新方法
GPS设备海上动态定位精度检测新方法摘要:为解决GPS设备海上动态定位精度检测的问题,提出了利用高精度全站仪对GPS设备动态跟踪进行动态定位精度评定。
关键词:GPS设备;海上动态定位;精度检测;1动态检测基本原理系统主要有动态检定场、高精度全站仪、动态检测平台和计算机等组成。
动态检定场主要有坐标已知的检测基准点和检测基准方向点组成,主要用于提供动态检测的已知条件。
动态检测平台上有360℃棱镜、惯性测量设备和4个待检测的GPS接收机天线。
360℃棱镜和4个天线的相对位置固定,通过惯性测量设备测量的平台姿态参数,可以实现360℃棱镜坐标到4个天线坐标的转换。
实验前利用GPS授时型接收机对计算机进行时间同步,使计算机时间化为GPS时间。
实验时将高精度全站仪架设在已知点上,动态跟踪动态检测平台上的360℃棱镜;利用全站仪的测角测距数据解算出360℃棱镜各个时刻在局部坐标系内的坐标;利用360℃棱镜与待检测GPS接收机的固定关系将360℃棱镜的坐标传递到各个待检测GPS接收机的位置。
以传递来的全站仪测量的坐标作为比对标准,将由GPS接收机测量数据解算得到的坐标与比对标准进行比较,从而完成对GPS接收机的动态定位精度检测。
1.1动态检测基准数据采集与处理检测基准数据主要是由高精度全站仪采集。
实验选用瑞士LeicaTDA5005型工业全站仪。
该型号的全站仪具有自动目标识别功能ATR (AutomaticTargetRecognition)。
它通过仪器内置的马达和CCD相机来实现自动寻找合作目标、自动精确瞄准合作目标、自动锁定合作目标和自动跟踪合作目标。
在跟踪模式下,其测距精度为5mm+2mm*K,K为观测距离,单位为Km;测角精度为0.5″。
使用授时型GPS接收机对便携式计算机的内部时间进行时间同步。
通过采集GPS时间信号,同时提取计算机的内部时间信号,计算二者之间的时钟参数以实现时间同步,为全站仪观测数据标记准确的测量时刻。
GNSS动态定位性能评价研究现状与进展_丛佃伟
第4卷第2期2016年06月导航定位学报Journal of Navigation and PositioningVol.4,No.2Jun.,2016收稿日期:2015-09-28基金项目:地理信息工程国家重点实验室开放研究基金项目(SKLGIE2015-M-2-5)。
第一作者简介:丛佃伟(1982—),男,山东潍坊人,博士,讲师,研究方向为卫星导航及应用。
引文格式:丛佃伟,许其凤.GNSS动态定位性能评价研究现状与进展[J].导航定位学报,2016,4(2):1-5.(CONG Dianwei,XUQifeng.Research status and advances of GNSS accuracy evaluation methods for kinematic positioning[J].Journal of Navigation and Positioning,2016,4(2):1-5.)DOI:10.16547/j.cnki.10-1096.20160201.GNSS动态定位性能评价研究现状与进展丛佃伟1,2,许其凤1(1.信息工程大学导航与空天目标工程学院,郑州450001;2.地理信息工程国家重点实验室,西安710054)摘要:定位性能是卫星导航系统性能的基础和核心,卫星导航系统定位性能评价贯穿于卫星导航系统的设计、研发、部署、运行和扩展等各个阶段。
针对GNSS动态定位性能评价方法展开研究,对当前GNSS动态定位性能评价方法进行分类和分析,指出几种方法存在的不足之处,提出一种利用摄影/惯导组合测量方法建立GNSS动态定位性能检定系统的基本思路。
实验结果表明该方法可为建立GNSS动态定位性能检定系统提供参考。
关键词:GNSS;动态定位;测试评估;检定中图分类号:P228 文献标志码:A 文章编号:2095-4999(2016)02-0001-05Research status and advances of accuracy evaluation methods for GNSS kinematic positioningCONG Dianwei1,2,XU Qifeng1(1.Institute of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou 450001,China;2.State Key Laboratory of Geo-information Engineering,Xi’an 710054,China)Abstract:The positioning accuracy of the GNSS is an important technical indicator.Test and evaluation of positioning per-formance always play an important role throughout the design stage,development stage,deployment stage,operational stage,and so on.The paper studied on the issue of GNSS kinematic positioning accuracy evaluation methods.It pointed out the disad-vantages of the current evaluation methods,and then proposed to build a kinematic positioning calibration system using thephotography/SINS integrated measurement technology.Experimental result showed its to feasibility in the simulation and prac-tical test.Keywords:GNSS;kinematic positioning;test and evaluation;calibration0 引言定位性能是全球导航卫星系统(global navigationsatellite system,GNSS)的重要技术指标,也是衡量GNSS技术水平的重要标志。
GPS动态定位精度测试研究
基于动态RTK稳定性与可靠性的研究
基于动态RTK稳定性与可靠性的研究摘要:本文主要的介绍了GPS、RTK技术的原理及其方法,以及影响RTK 测量的诸多因素,并对RTK数据的稳定性和准确性以及其它特性作了具体的外业实验。
通过实验,得到了关于RTK技术测量的一些结论,并对结论进行了讨论,以及对于RTK的问题提出了一些解决方法。
关键词:是实时动态定位,实时差分定位,可靠性,稳定性0引言全球定位系统具有在海、陆、空进行全方位三维导航与定位能力的新一代卫星导航定位系统。
经近10年我国测绘等部门的使用表明,GPS以全天侯、高精度等显著特点,赢得广大测绘工作者的信赖,成功地应用于大地测量、工程测量、地球动力学等多学科。
1概论1.1GPS定位系统发展由来20世纪50年代末期,美国开始研制用多普勒卫星定位技术进行测速、定位的卫星导航系统,叫做子午卫星导航系统(NNSS)。
1973年美国国防部便开始组织海陆空三军,共同研究建立新一代卫星导航系统的计划。
这就是目前所称的“授时与测距导航系统/全球定位系统”(Navigation System Timing and Ranging/Global Positioning System-NA VSTAR/GPS),而通常简称为“全球定位系统”(GPS)2GPS、RTK测量的原理及工作方法2.1GPS测量的原理GPS测量的基本原理就是利用测距交会的原理确定点位。
GPS卫星向广大用户发送的导航电文是一种不归零的二进制数据码D(t),码率fd=50HZ。
在GPS定位中,GPS卫星是高速运动的卫星,其坐标值随时间在快速的变化着。
需要实时地由GPS卫星信号测量出测站至卫星之间的距离,实施的由卫星的导航电文解算出卫星的坐标值,并进行测站点的定位。
依据测距的原理,其定位原理及方法主要有伪距法定位,载波相位测量定位以及差分GPS定位等2.1.2时间系统GPS测量原理已经明显的解释出GPS系统是测时测距系统。
作为观测目标的GPS卫星以每秒几公里的速度运动。
GPS动态测量方法
一、 RTK的作业过程1.启动基准站将基准站架设在空旷的控制点上,正确连接各仪器电缆,打开仪器,把基准站设置为动态测量模式。
2、建立新工程,定义坐标系统新建一个文件夹,设置好测量参数,如椭球参数、投影参数等。
这个文件夹中包括许多小文件,它们分别是测量的成果文件和各种参数设置文件,如*.dat、*.cot、*.rtk、*.ini 等打开手簿到主页面,点击设置—单位设置第一项,设置坐标显示格式设置,即中央经线设置1)在“中央经线”项里输入你当地的中央子午线经度,在“尺度比(Scale)”里输入1.00000002)在“横坐标平移量(False Easting)”里输入+500000,在“纵坐标平移量(False Northing)”输入0.0。
这几个参数输入后把光标移到下面的Save(保存),这时,位置显示格式设置好了,即以投影坐标形式显示,单位是“米”,选这种格式显示的好处就是:显示的结果与地形图上的坐标一致,在实际工作中便于定位。
第二项,“坐标系统(Map Datum)”,点击它,在出现的列表项里选择“用户(User)”,点击后出现“用户参数(User Datum)”参数项包括:DX,DY,DZ,DA,DF,这组参数各地的值都不一样,要到当地测绘部门获取,设置好参数后,同样点击“保存”。
第三项,“距离和速度”单位,我们选择“米制(Metric)第四项,高度单位选择“米(Meters)”;第五项,“压力单位”,选择“毫巴(Millibars)”,至此,你的手持GPS 机已经根据你的需要设置好了,点击页面切换键返回到主菜单3、坐标转换即点校正GPS测量的为WGS-84系坐标,而我们通常需要的是在流动站上实时显示国家坐标系或当地独立坐标系下的坐标,因此要进行转换。
点校正可以通过两种方式进行。
(1)在已知转换参数的情况下。
如果有当地坐标系统与W CS84坐标系统的转换七参数,则可以在测量控制器中直接输入,建立坐标转换关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S u y o n mi o i o i g Ac u a y o e t g M eh d n p rme t t d n Dy a c P st n n c r c fT si t o sa d Ex e i n s i n
YU F n — n S a g we , HANG in g , U u q a g HU Xu k Ja -a G F — in , - e
随着基 于上下 文位置 感知技 术与 实时定 位技术 的
快 速发 展 , 时定 位 系统 的应 用越 来 越 广泛 。一 些 实 实
应 用领域 , 在对 实时定 位系统 进行测 试与评 估 时 , 应根 据定 位精 度 的要 求 选 择合 适 的 实 时定 位 系统 。因此 ,
时定位系统 已在物流 、 定位导航、 安全 、 矿业 、 汽车工 业、 医疗 机构 等领 域进 行 了成 功部 署 和 应 用 。然 而 不 同 的应 用 领域 对 实 时定 位 系统 的精 度 有 着 不 同 的要 求¨ 。例如 , J 在人员定位 的应用 中对定位精度要求往
往较低 , 在汽车 工业 等 资 产定 位 领域 对 定 位 精度 的 而 要求往 往较 高 。同时 , 种 实 时定 位 系 统 由于 采用 的 各 技术 不 同 , 定位 精 度 也有 较 大 差 异 ¨ J 。针 对 不 同 的
定位精度成为各行业关注的焦点… , 随之 而来 的问题 是 如何有 效地测 试 和评 估实 时定位 系统 的精度 。 实 时定位 系统 的精度可 分 为静 态定位 精度 和动态 定 位精度 两种 , 相应 的测试 方 法 也 有所 不 同。静 态定 位 精度 的测试 方法较 简单 , 如常用 的定 点测试 方法等 , 国 内外相 关文献 均有 提及 J 。许多 实时定 位 系统 制
・
1 6・
《 测控技术} 02 2 1 年第 3 卷第 1 1 期
动态定位精度测试方法及实验研究
余 芳文 ,尚建嘎 , 古富强 ,胡旭科
( 中国地质大学 信息工程学院 , 湖北 武汉 4 0 7 ) 30 4
摘要 : 为测试 与评估 实时定位 系统 的动 态定位精度 , 以高精 度 的 n n L C 实时定位 系统 作 为测 试 平 台, ao O 采 用交叉 法和轨迹 法 , 对直线 、 折线 、 圆形和 圆边 矩形 运动 模 型下 动 态定位 精 度进 行 了测试 与评 估 。测
( aut o f m t nE g er g C iaU i r t o esi csWu a 30 4 C ia Fcl f n r ai ni e n, h n esy f oc n e, h n 0 7 , hn) y Io o n i n v i G e 4
Absr c : e ta d e auae t e d na c p sto n c u a y o h e ltme lc to y tm, h ih p e ta t To ts n v l t h y mi o i nig a c r c ft e r a —i o ain s se t e h g r — i cso a o OC r a—i o ai n s se wa a e s t e ts ltom . mp o i h rs t o n iin n n L e ltme lc to y t m s t k n a h e tp afr By e lyng t e c o s meh d a d t e lc so i e t o t e d n mi o iin n c urc a e n e au t d un e h to d l ft e h o u fln sme h d, h y a c p sto i g a c a y h d b e v l ae d rt emoin mo eso h l , r k n ln , ic e a d r u d e g s r ca ge Ex e i n a e ut h we h tt i o u in wa r n i b o e i e cr l n o n d e e t n l . p rme t lr s lss o d t a h s s l t s mo e i — ne o t i v o s e sn h y a c p sto i g a c r c ft e r a —i o ain s se I o l r vd Swi u t e fra s s i g t e d n mi o iin n c u a y o h e ltme lc to y t m. tc u d p o i e U t i h a g i e wh n we c o s r a s s e ltme l c t n s se u d e h o e o s e s a r a —i o ai y tm. o Ke r : y a c p sto i g a c r c ; e t g e p rme t; y wo ds d n mi o iin n c u a y t si x e i n s RTL n n LOC n S; a o
试 结 果表 明 , 该测试 方 法能够 比较 直观地评 估 实时 定位 系统 的动 态 定位精 度 。 它可 用 于 实时定 位 系统
用 户进 行 系统选 型与评估 。
关键词 : 态定位精 度 ; 动 测试 实验 ; T S nn L C R L ;ao O 中 图分 类号 :P 0 . :0 0—8 2 ( 0 2 0 0 1 0 10 8 9 2 1 ) 1— 0 6— 5