磁悬浮系统下位机硬件设计
磁悬浮控制装置设计开发方案及流程

磁悬浮控制装置设计开发方案及流程
磁悬浮技术是一种高精度、高速度、高稳定性的控制技术,广泛应用于列车、永磁同步电机等领域。
本文将介绍磁悬浮控制装置的设计开发方案及流程。
首先,需要确定磁悬浮控制装置的应用场景、控制要求、控制范围等关键参数。
在此基础上,进行系统分析和建模,分析系统的动态特性、控制架构、传感器和执行器的选型等问题。
接下来,进行硬件设计和软件开发。
硬件设计包括电路设计、PCB 设计、机械结构设计等,软件开发包括控制算法设计、系统仿真、编程实现等。
需要关注系统的实时性、可靠性、安全性等方面。
最后,进行系统测试和调试,包括静态测试、动态测试、性能测试等。
在测试过程中需要重点关注系统的稳定性、精度、鲁棒性等指标,并进行不断的优化和改进。
总之,磁悬浮控制装置的设计开发需要深入分析和研究系统特性,合理选择硬件和软件方案,严格测试和调试,以达到设计要求和实际应用需求。
- 1 -。
磁悬浮惯性稳定平台硬件设计与实现

Science &Technology Vision科技视界磁悬浮惯性稳定平台硬件设计与实现叶涛1,2于啸男2(1.中北大学信息与通信工程学院,山西太原030051;2.北京航天控制仪器研究所,中国北京100039)【摘要】本文介绍磁悬浮惯性稳定平台的工作原理。
提出了惯性稳定平台的硬件电路总体设计方案,设计了以FPGA+DSP 为核心的硬件控制系统。
描述了硬件系统的组成,数字电路系统和模拟电路系统,并分别介绍各个电路系统的组成部分以及功能。
详细描述了旋转变压器的设计、控制系统设计和电机驱动设计过程。
【关键词】惯性稳定平台;硬件电路;FPGA+DSP ;控制系统;电机驱动Designed And Implementation of hardware circuit for magnetic levitation inertial stabilization platformYE Tao 1,2YU Xiao-nan 2(1.School of Information and Communication Engineering,North University of China,Taiyuan Shanxi 030051,China;2.Beijing Aerospace Control Institute,Beijing 100039,China )【Abstract 】In this paper,the working principle of magnetic levitation inertial stabilization platform is introduced.The hardware circuit design scheme of inertial stabilization platform is given,and the hardware control system based on FPGA+DSP is designed.The composition of the hardware circuit,the digital circuit system,and the components and functions of each circuit are described.The process of the rotary transformer 、the control system and the motor driver design are described in detail.【Key words 】Inertial platform;Hardware circuit;FPGA+DSP;Control system;Motor driver0引言惯性稳定平台是实现高分辨率航空对地观测的关键设备,使用惯性稳定平台能够有效的隔离载体运动对遥感载荷产生的干扰[1]。
磁悬浮系统设计
磁悬浮系统设计作者:李欣颀李云飞陈子川蔡兴宗杨梦玉来源:《科学导报·学术》2020年第49期摘要:采用微元分析方法构建下推式磁悬浮系统的数学解析式模型,构建下推式磁悬浮控制系统硬件平台。
由正交放置的霍尼韦尔3503传感器采集浮子磁场在其垂直分量上的磁场大小,线性转换成电信号经运算放大器放大后作为控制器STM32读取和写入控制信息,并用于数字滤波算法和运行控制算法后将计算数据作用于功率放大器件驱动螺旋线圈产生校正磁场。
使浮子处于动态平衡,达到预期控制效果。
1 系统模型设计一种多自由度,下推磁场磁悬浮系统。
控制目标是让浮子不借助除磁场以外的力,稳定悬停在指定空间位置,并在此控制基础上完成悬浮磁体对随机扰动的控制。
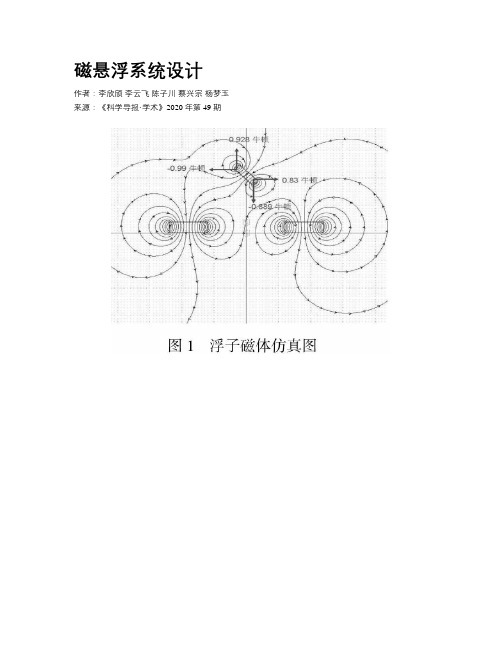
通过下推式磁悬浮磁源概念图,环形磁铁产生较大的谷形磁场。
使得浮子磁体在垂直方向上收到与重力相反的排斥力,因此物体悬浮的高度只能取决于环形磁铁的磁场的大小和浮子或浮子与浮子及其称重物质量决定。
在水平面上,浮子受到随机扰动,向远离中心位置运动。
受到不对称的磁场力斥力,吸引力大的一边会持续增加,吸引力小的一边会愈加减小,促进浮子磁体向远离中心位置运动;在磁场中还受到旋转力矩的作用,会使浮子发生翻转。
因而为了保障水平面上浮子磁体的稳定,必需投入新的微弱的磁场克服原先的运动状态。
使其在设定位置达到平衡。
Vizimag是利用有限元分析来仿真复杂磁场的软件,用Vizimag的软件来画出合成磁场分布,仿真出浮子受沿X方向的电磁力和垂直方向上的旋转力矩来。
如下所示。
可见,在不平衡位置,浮子磁体会收到纵向的力使浮子加速移动产生更大的位置误差,同时会受到转矩,使浮子磁体发生翻转。
2 硬件系统设计如图2所示,下推式磁悬浮的整个控制系统包括电源模塊、位置测量模块,功率放大模块和主控制器模块。
芯片的全部的电力供应来源于电源模块,本文设计三种板载电源,分别为12V、5V、和3.3V。
3.3V的电压供给STM32主控制器使用,5V的电压供给位置检测模块内芯片、驱动芯片使用,12V的电压供给驱动模块使用。
基于PC机的磁悬浮控制系统研究_第二章磁悬浮球系统组成及系统模型_20_28

第二章磁悬浮球系统组成及系统模型2.1 磁悬浮球系统组成磁悬浮球控制系统(如图2.1)的硬件主要有以下几部分组成:图2.1 磁悬浮球控制系统结构图2.1.1磁悬浮试验平台磁悬浮试验平台由电磁铁、传感器、功率放大器和被控对象(钢球)等元器件组成。
传感器是磁悬浮系统的重要部件之一,它的性能对系统的控制精度起决定作用,因为控制系统的精度不可能超过传感器的精度。
本论文所用的磁悬浮试验平台采用的是涡流传感器,钢球相对于平衡位置的距离经过涡流传感器检测后转换为电压量,再由信号放大器放大输出。
为了消除传感器电路中的高频噪音,在传感器电路中还带有低通滤波器,其时间常数很小,对系统的影响可以忽虑不计。
功率放大器的作用是根据控制器的输出向电磁铁线圈提供电流。
由于电磁铁线圈是一个由电感和电阻组成的负载,如果功放输出的是电压,则流过负载的控制电流会由于电感的影响而产生滞后作用,这对于提高系统的动态性能很不利。
为了避免电感的滞后作用,磁悬浮试验平台采用的是电压-电流功率放大器,功率放大器的输出与电磁铁线圈相连,直接控制线圈的电流。
为了控制9功率管散热问题,采用开关功率放大器。
磁悬浮试验平台采用的电磁铁是单绕组结构,当无任何外力干扰时,激励线圈内有一定的偏置电流,由功放提供偏置电流,当有外力干扰或重力干扰时,通过改变线圈的电流来保证钢球的稳定悬浮。
2.1.2数据采集卡数据采集卡的接口一般为 ISA 和 PCI 两种接口形式。
作为一种传统的计算机接口卡总线技术,ISA(Industry StandardArchitecture)总线曾经取得了很大的成功,成为事实上的业界标准。
但是随着计算机技术的发展,ISA 总线显得越来越不能适应计算机技术的发展。
ISA 总线的缺陷主要是表现在:1.数据传输速度较低,总线采用 8M/s 的总线时钟,16bit的总线字宽,在大多数的应用中,只能达到 5MB/s 的传输速度,这些对于高速采集、控制来说是不可接受的。
磁悬浮列车运行控制系统的设计与研究

磁悬浮列车运行控制系统的设计与研究磁悬浮列车,作为一种新型的交通工具,已经在国内外被广泛应用。
由于具有运行速度快、运行平稳等特点,磁悬浮列车被认为是未来高速公共交通的发展方向之一。
而作为磁悬浮列车的关键子系统之一,磁悬浮列车运行控制系统的设计和研究对磁悬浮列车的运行具有重要的影响。
一、磁悬浮列车运行控制系统的基本原理磁悬浮列车运行控制系统是通过调节电磁悬浮系统、线圈电流和牵引系统等参数实现对磁悬浮列车的运行控制。
电磁悬浮系统是磁悬浮列车的重要部分,其主要作用是实现车体和轨道之间的悬浮和导向。
牵引系统由动力电池、电动机、电子控制系统等部分组成,主要作用是提供行驶所需的动力。
二、磁悬浮列车运行控制系统的架构设计为了实现磁悬浮列车的高效、安全、舒适的运行,磁悬浮列车运行控制系统的架构设计非常重要。
其主要包括牵引系统、悬浮控制系统、线路信号处理系统等部分。
其中,牵引系统的主要作用是提供动力,悬浮控制系统的主要作用是实现车体和轨道之间的悬浮和导向,线路信号处理系统的主要作用是获取线路数据,进行数据处理和传输。
三、磁悬浮列车运行控制系统的控制策略磁悬浮列车运行控制系统的控制策略是实现运行控制的关键。
其主要包括控制器的设计和控制算法的设计。
控制器一般选择高性能的计算机,并采用实时操作系统,保证控制系统的稳定性和可靠性。
控制算法的设计涉及到数据采集与处理、状态估计和控制器设计等内容,需要结合磁悬浮列车的实际情况进行设计。
四、磁悬浮列车运行控制系统的仿真磁悬浮列车运行控制系统的仿真是验证控制系统的性能和可靠性的重要手段。
其主要包括建模、仿真和结果分析等步骤。
建模是指将磁悬浮列车分析为一组方程组,并将其转换为仿真程序。
仿真是通过计算机程序实现对磁悬浮列车运行控制系统的模拟。
结果分析是对仿真结果进行分析,评估磁悬浮列车运行控制系统的性能和可靠性。
五、磁悬浮列车运行控制系统的发展趋势磁悬浮列车运行控制系统是磁悬浮列车的重要组成部分,其发展趋势与磁悬浮列车的发展趋势密切相关。
磁悬浮列车电磁悬浮系统的设计与优化

磁悬浮列车电磁悬浮系统的设计与优化磁悬浮列车作为一种新型的高速交通工具,以其快速、安全、高效的特性备受关注。
电磁悬浮系统是磁悬浮列车的关键部分,其设计与优化对于列车的运行性能和稳定性有着重要影响。
本文将深入探讨磁悬浮列车电磁悬浮系统的设计原理和优化方法。
磁悬浮列车的电磁悬浮系统主要由轨道磁铁和车体磁铁两部分组成。
轨道磁铁产生的磁场和车体磁铁产生的磁场相互作用,形成一种悬浮力,使列车悬浮在轨道上。
为了提高磁悬浮列车的运行速度和平稳性,电磁悬浮系统的设计需要考虑以下几个方面。
首先,电磁悬浮系统的稳定性是设计的关键。
轨道磁铁和车体磁铁之间的磁场相互作用力需要保持平衡,以保证列车的稳定悬浮。
这就需要合理设计磁场的强度和方向,使得悬浮力和重力之间的平衡达到最佳状态。
同时,电磁悬浮系统的控制系统也需要具备高度的灵敏度和稳定性,能够对列车的运行状态进行实时监测和调节。
其次,电磁悬浮系统的能量消耗也是需要考虑的因素。
为了减小能源消耗,提高列车的运行效率,需要优化轨道磁铁和车体磁铁的设计。
一方面,可以通过改变磁场的强度和分布来调整悬浮力的大小,使其尽量接近列车的重力;另一方面,可以采用高效的超导材料制造磁铁,降低能量损耗,提高系统的能量利用率。
另外,电磁悬浮系统的运行速度和噪音也是需要优化的方面。
为了提高列车的运行速度,可以通过增大悬浮力来减小列车与轨道之间的接触摩擦力,从而减小动力损耗。
同时,合理设计轨道的曲线和坡度,可以减小列车在转弯和上下坡时的离心力和弯曲力,提高运行速度和平稳性。
此外,还可以通过优化磁场的分布和控制系统的调节参数,减少磁悬浮列车的噪音产生,提供更加安静的乘车环境。
最后,电磁悬浮系统的安全性是不可忽视的。
为了保证列车的安全运行,电磁悬浮系统需要具备高度的可靠性和安全性。
在设计过程中,需要考虑不同的故障情况和风险因素,并采取相应的措施来减小故障的发生和影响。
同时,对电磁悬浮系统的监测和维修也需要重视,及时发现和排除潜在的问题,确保列车运行的安全和稳定。
超高速列车磁悬浮控制系统设计与实现
超高速列车磁悬浮控制系统设计与实现近年来,高速列车作为人们出行的重要选择,受到了越来越多的关注。
其中,磁悬浮列车具有高速稳定、无摩擦、无噪音等优点,被广泛认可作为未来城市轨道交通的发展方向。
而磁悬浮列车的核心部分便是磁悬浮控制系统。
本文将从磁悬浮控制系统的原理、设计和实现三个方面,介绍超高速列车磁悬浮控制系统的相关知识。
一、磁悬浮控制系统的原理磁悬浮列车是通过磁力悬浮技术实现悬浮和牵引的。
其中,磁悬浮控制系统是核心部分,它由车体姿态控制系统、悬浮力控制系统和进出站控制系统三个大部分构成。
1. 车体姿态控制系统车体姿态控制系统主要作用是控制车体在行驶中的姿态,确保车体的稳定性。
它能够通过控制悬浮力合力点(又称“补偿点”)的位置,来实现车体姿态的调整。
2. 悬浮力控制系统悬浮力控制系统主要作用是控制车体与轨道间的距离,以保持合适的悬浮高度。
其调节基于电磁簧的线圈,通过改变电磁簧中的电磁场强度,来修正车体与引导轨之间的距离差。
3. 进出站控制系统进出站控制系统主要作用是控制列车的运行速度、加减速度和停车位置等,以保证列车安全、平稳地进出车站。
二、磁悬浮控制系统的设计磁悬浮控制系统的设计,主要包括控制模型的建立和控制算法的设计。
1. 控制模型的建立磁悬浮控制系统的建模是为了寻找一种适合控制的模型,通常可以使用状态空间模型或者其他控制模型。
其中,状态空间模型可以将动态系统表示为一系列微分方程,从而便于控制器的设计和控制器参数的调整。
2. 控制算法的设计控制算法是磁悬浮控制系统的关键部分,无论是经典的PID控制算法,还是先进的自适应控制算法,都需要针对具体情况进行设计。
比如,对于磁悬浮列车,由于其速度快、重量轻、摩擦小等特点,采用传统的PID控制算法可能存在一些性能不佳的问题。
因此,一些高级控制算法,如模糊控制、神经网络控制、自适应控制等,已经应用到了磁悬浮列车的控制系统中。
三、磁悬浮控制系统的实现磁悬浮控制系统的实现是将设计好的控制器标准化和生产。
磁悬浮原理及控制
magnetic suspension technique本文介绍磁悬浮主轴系统的组成及工作原理,提出了一种在常规PID基础上的智能PID控制器的新型数字控制器设计。
其核心部件是TI公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。
用C2000作为开发平台,设计在常规PID基础上的智能PID控制器。
理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。
1 引言主动磁悬浮轴承(AMB,以下简称磁轴承)是集众多门学科于一体的,最能体现机电一体化的产品。
磁悬浮轴承与传统的轴承相比具有以下优点:无接触、无摩擦、高速度、高精度。
传统轴承使用时间长后,磨损严重,必须更换,对油润滑的轴承使用寿命会延长、但时间久了不可避免会出现漏油情况,对环境造成影响,这一点对磁悬浮轴承就可以避免,它可以说是一种环保型的产品。
而且磁轴承不仅具有研究意义,还具有很广阔的应用空间:航空航天、交通、医疗、机械加工等领域。
国外已有不少应用实例。
磁悬浮轴承系统是由以下五部分组成:控制器、转子、电磁铁、传感器和功率放大器。
其中最为关键的部件就是控制器。
控制器的性能基本上决定了整个磁悬浮轴承系统的性能。
控制器的控制规律决定了磁轴承系统的动态性能以及刚度、阻尼和稳定性。
控制器又分为两种:模拟控制器和数字控制器。
虽然国内目前广泛采用的模拟控制器虽然在一定程度上满足了系统的稳定性,但模拟控制器与数字控制器相比有以下不足:(一)调节不方便、(二)难以实现复杂的控制、(三)不能同时实现两个及两个以上自由度的控制、(四)互换性差,即不同的磁悬浮轴承必须有相对应的控制器、(五)功耗大、体积大等。
磁轴承要得到广泛的应用,模拟控制器的在线调节性能差不能不说是其原因之一,因此,数字化方向是磁轴承的发展趋势。
同时,要实现磁轴承系统的智能化,显然模拟控制器是难以满足这方面的要求。
因此从提高磁轴承性能、可靠性、增强控制器的柔性和减小体积、功耗和今后往网络化、智能化方向发展等角度,必须实现控制器数字化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KEY WORDS: magnetic suspension system, PID controller, Arduino development board, Holzer sensor
II
河南科技大学毕业(设计)论文
目 录
第一章 前 言 ...................................................................... 1
第三章 磁悬浮系统数学模型 ............................................ 14
§3.1 系统结构 ........................................ 14 §3.2 控制系统原理 .................................... 15
III
河南科技大学毕业(设计)论文
致 谢 .................................................................................. 26 附 录 .................................................................................. 27
第二章 磁悬浮系统的结构 ................................................. 6
§2.1 系统组成原理 ..................................... 6 §2.2 磁悬浮实验本体 ................................... 7 §2.3 磁悬浮实验电控箱 ................................. 8 §2.3.1 电源电路模块 ................................. 9 §2.3.2 输出电路模块 ................................ 10 §2.4 磁悬浮实验平台 .................................. 10 §2.5 传感器和线圈 .................................... 12
§1.1 磁悬浮技术综述 ................................... 1 §1.1.1 磁悬浮方式分类 ............................... 1 §1.1.2 控制方式分类 ................................. 2 §1.2 磁悬浮技术的应用及展望 ........................... 2 §1.2.1 磁悬浮列车 ................................... 2 §1.2.2 磁悬浮轴承 ................................... 3
1g/cm 2 ,所以被称为永久磁体斥力悬浮方式。当然,根据所用的 磁材料的不同,其产生的斥力相应变化。但是,由于横向位移的不稳定因素, 需要从力学角度来安排磁铁的位置。近年来出现了一些该方式的产品,例如 日本 1994 年 4 月公布的专利中,就有关于该方式配置方案的内容。随着稀土 材料的普及,该方式将会被更多的应用到各个领域。 (3) 感应斥力方式:此种控制方式利用了磁铁或励磁线圈和短路线圈之间 的斥力,简称感应斥力方式。为了得到斥力,励磁线圈和短路线圈之间必须 有相对的运动。这种方式主要应用于超导磁悬浮列车的悬浮装置上。但是, 在低速时由于得不到足够的悬浮力, 在低速或停止时需要有车轮来支撑车身。 从原理上而言,该方式很少被应用于低速传动机构。
第四章 磁悬浮系统工作原理 ............................................ 17
§4.1 传感器模块 ...................................... 17 §4.2 控制模块 ........................................ 18 §4.3 功率放大模块 .................................... 20 §4.4 电源供电模块 .................................... 20
§1.1.1 磁悬浮方式分类
一般而言,磁悬浮可分为以下 3 种主要的应用方式: (1) 电磁吸引控制悬浮方式:此种控制方式利用了导磁材料与电磁铁之间 的吸力,几乎绝大部分磁悬浮技术采用该技术。虽然原理上这种吸引力是一 种不稳定的力,但通过控制电磁铁电流的大小,可以将悬浮气隙保持在一定 数值上。随着现代控制理论的发展和驱动元器件高性能、低价格化,该方式 得到了广泛应用。在此基础上也有研究人员提出了把需要大电流励磁的电磁 铁部分替换成可控型永久磁铁的方案,并深入的进行了研究和开发工作。该 方案可以大幅度的降低励磁损耗,甚至在额定悬浮高度时不需要能量,是一 种非常值得注目的新技术。 (2) 永久磁铁斥力悬浮方式:此控制方式利用永久磁体间的斥力,一般产
§1.1.2 控制方式分类
目前,磁悬浮控制应用技术分为数字控制方式和模拟控制方式。随着近 年来现代控制理论的日趋成熟,同时随着计算机计算速度的飞跃提高,数字 式控制方式得到越来越多的应用。与数字式控制相比,由于模拟式的控制部 分为硬件构成,容易被技术人员理解、掌握和调试,并且相对价格比较低。 容易实现产品化、系列化,从而在产业界得到了广泛的应用。目前的磁悬浮 轴承产品大多数为模拟式控制。但是,模拟运算电路一旦制板,则无法再做 根本性修正,缺乏软件的灵活性,同时也无法发挥多种现代控制理论的强大 威力。
结 论 .................................................................................. 22 总 结 .................................................................................. 23 参考文献 ............................................................................ 25
河南科技大学毕业(设计)论文
磁悬浮系统下位机硬件设计 摘 要
磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点, 在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应 用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本 设计以 Arduino 开发板为平台,以 PID 控制为原理,设计出 PID 控制器对磁 悬浮系统进行控制。 Arduino 是一款便捷的开源电子原型平台,包含硬件和软件。能通过各 种传感器来感知环境, 控制灯光、 马达等。 板子上的微控制器可以通过 Arduino 的编程语言来编写程序。 PID 控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟 的控制器,以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数 学模型,并以此为研究对象,在 Arduino 开发板的平台上,设计了 PID 控制 器,确定控制方案。最后,本设计对以后研究工作的重点进行了思考,提出 了自己的见解。
关键字:磁悬浮系统, PID 控制器,Arduino 开发板,霍尔传感器;
I
河南科技大学毕业(设计)论文
LOWER COMPUTER HARDWARE DESIGH OF THE MAGNETIC SUSPENSION SYSTEM ABSTRACT
Magnetic suspension technology, which has a series of advantages such as contact-free, no friction, no wear, no need of lubrication and long life expectancy, is widely concerned and adopted in high-tech areas such as energy, transportation, aerospace, industrial machinery and life science. With the extensive application of maglev technology, the control of the maglev system has become a priority. In this paper, for the principle of PID control, Arduino development board as platform, PID controller designed to control magnetic suspension system. Arduino is a convenient electronic prototype of the open source platform, including hardware and software. Through various of sensors, it can perceive the environment, to control lighting, motor, etc. The micro controller on thr board can be programmed through the Arduino programming language to edit the program. Since PID controllers have been the process of industrial production has been most widely and most sophisticated controller by its simple structure, easy to implement, robust, etc., in a dominant position. On the basis of analyzing of magnetic suspension system’s structure and working principle, its system mathematical model was established. This thesis describe PID controller designed on the platform of Arduino development board and get control scheme. The key research works for further study are proposed at last.