E500 series MP 驱动程序 v
PowerFlex 750-Series 控制节板远程安装套件指南说明书
Installation InstructionsPowerFlex 750-Series Control Pod Remote Mounting Kit PowerFlex 750-Series Control Pod Remote Mounting Kit is used to install the control pod in a cabinet that is separate from a Frame 8 or larger drive.For additional general information, refer to:Kit ContentsThe Control Pod Remote Mounting Kit (20-750-RPD1-F8) contains the following materials.Additional Materials When the factory installed control pod is being removed from the drive forremote mounting, the user must also obtain the Converter Right Cover (noPOD) kit (SK-R1-CCVR2-F8). This kit contains the following materials.Title Publication Available Online at …PowerFlex 750-Series AC Drives Installation Instructions /literature PowerFlex 750-Series AC Drives (Frame 8) Hardware Service Manual 750-TG001Wiring and Grounding Guidelines for PWM AC Drives DRIVES-IN001Guarding Against Electrostatic Damage 8000-4.5.2Item Quantity Description 24V Power Wiring Harness 123 m (75 ft) wire harness for internal 24V supply on converter at P14 on the fiber interface board.Inverter Fiber-optic Cable 223 m (75 ft) fiber-optic cable connects fiber interface board and the power layer board.Fiber-optic Transceiver 2Transceiver for fiber-optic cable connections to the converter gate board and the fiber interface board. (Needed when the drive is shipped with no POD from the factory.)External Power Supply Connector 1Three position connector for optional user-supplied 24V power connection at P13 on the fiber interface board.Twist-Lock Cable Support 3Supports 24V power wiring harness in the pod.M4 x 12 mm Long Self-Tapping Screw 4Used to mount the control pod to a panel.M4 x 12 mm Long Machine Screw 3Used to mount cable supports.Item Quantity DescriptionCover 1Converter Right Cover for no POD.Bracket 2Brackets used to support left side of cover.M5 x 14 mm Long Machine Screw 6Used to secure the brackets and cover to theconverter panel.2PowerFlex 750-Series Control Pod Remote Mounting KitGeneral Precautions Read the following precautions before you begin working on the drive.Qualified PersonnelATTENTION: Only qualified personnel familiar with adjustable frequencyAC drives and associated machinery should plan or implement theinstallation, start-up and subsequent maintenance of the system. Failureto comply may result in personal injury and/or equipment damage.Personal SafetyATTENTION: To avoid an electric shock hazard, verify that the voltage onthe bus capacitors has discharged completely before servicing. Measurethe DC bus voltage at the -DC and +DC TESTPOINT sockets on the front ofthe power module (see Removing Power from the Drive on page4 forlocation).Product SafetyATTENTION: This drive contains ESD (Electrostatic Discharge) sensitiveparts and assemblies. Static control precautions are required wheninstalling, testing, servicing or repairing this assembly. Componentdamage may result if ESD control procedures are not followed. If you arenot familiar with static control procedures, reference Guarding AgainstElectrostatic Damage, publication 8000-4.5.2 or any other applicable ESDprotection handbook.Class 1 LED ProductATTENTION: Hazard of permanent eye damage exists when using opticaltransmission equipment. This product emits intense light and invisibleradiation. Do not look into module ports or fiber-optic cable connectors.PowerFlex 750-Series Control Pod Remote Mounting Kit3 Commonly Used Tools Service ToolsThis list covers the tools needed for kit installation.Fastener/Tool/Torque Information The disassembly illustrations in this publication identify the type of fastener, tool, and tightening torque used for disassembly/assembly of components in the drive:IMPORTANT Care must be taken to ensure that tools and/or hardware components do not fall into open drive assemblies. Do not energize the drive unless allloose tools and/or hardware components have been removed from thedrive assemblies and enclosure.Tool Description DetailsESD-protected place of work Working surface, Floor covering, seat and ground connections ESD-protective clothing Wrist wrap, shoes, overall clothing (coat)Multi meter Digital multi meter, capable of ac and dc voltage, continuity,resistance, capacitance measurements, and forward diode biastests. Fluke model 87 III or equivalent.Flat nose screw driver 5 mm (0.19 in.), 6.4 mm (0.25 in.)Hexalobular screw driver/bit#20, #25Phillips® screw driver/bit(1)(1)Phillips® is a registered trademark of the Phillips Screw Company.#2Torque wrench1...12 N•m (8.8…106 lb•in)Tool Type and Size:Px Phillips screw driver/bit and sizeTxx Hexalobular screw driver/bit and sizeFastener/Tool/Torque Information:4PowerFlex 750-Series Control Pod Remote Mounting KitRemoving Power from the Drive 1.Turn off and lock out input power. W ait five minutes.2.Verify that there is no voltage at the drive’s input power terminals.3.Measure the DC bus voltage at the -DC and +DC TESTPOINT socketson the front of the power module. ATTENTION: To avoid an electric shock hazard, verify that the voltage onthe bus capacitors has discharged completely before servicing. Measurethe DC bus voltage at the -DC and +DC TESTPOINT sockets on the front ofthe power module (see below for location).Remove power before making or breaking cable connections. When youremove or insert a cable connector with power applied, an electrical arc mayoccur. An electrical arc can cause personal injury or property damage by:•sending an erroneous signal to your system’s field devices, causingunintended machine motion•causing an explosion in a hazardous environmentElectrical arcing causes excessive wear to contacts on both the module andits mating connector. Worn contacts may create electrical resistance.PowerFlex 750-Series Control Pod Remote Mounting Kit5 Minimum Clearances The control pod must be mounted in a vertical orientation as shown and mustmake full contact with the mounting surface.•Do not use standoffs or spacers.•Inlet air temperature must not exceed 50 °C (122 °F).•Enclosure is rated IP00, NEMA/UL Open Type.6PowerFlex 750-Series Control Pod Remote Mounting KitApproximate Dimensions ArrayDimensions are in millimeters and (inches).PowerFlex 750-Series Control Pod Remote Mounting Kit7Remove Pod Assembly From Enclosure 1.Access the drive enclosure.2.Remove the control pod cover.3.Disconnect the factory installed internal 24V power supply cable fromP14 located on the fiber interface board.4.Disconnect the factory installed inverter fiber-optic cable from the P1(INV1) fiber-optic transceiver located on the fiber interface board. Description➊Internal 24V Power Connection Two point connector to P14.➋Inverter Fiber-optic Connection Fiber-optic cable to P1 fiber-optic transceiver INV1.8PowerFlex 750-Series Control Pod Remote Mounting Kit5.Loosen the captive screws on the back panel of the control pod until they6.Rotate the control pod to expose the hinge.7.Remove the four M4 x 12 mm screws that secure the control pod to theconverter control panel right side wall and remove the control pod. Ifdesired, the hinge can be removed from the control pod.PowerFlex 750-Series Control Pod Remote Mounting Kit9 8.Disconnect the factory installed internal 24V power supply cable fromconverter terminal block TB1 mounted on the converter control panelright side wall.9.Disconnect the factory installed inverter fiber-optic cable from the INVtransceiver located on the power layer interface board. Description➊Internal 24V Power Connection Three point connector disconnects from TB1 mounted onconverter control panel right side wall.➋Inverter Fiber-optic Connection Fiber-optic cable disconnects from INV fiber-optictransceiver on power layer interface board in card cage.10PowerFlex 750-Series Control Pod Remote Mounting KitMount and Wire the Control Pod When selecting a remote location for the control pod, note that the total length of each wiring harness provided is 23 m (75 ft).1.Drill 3.2 mm (0.13 in.) pilot holes in the control pod mounting surface.2.Mount the control pod using the four M4 x 12 mm self-tapping screwsprovided.PowerFlex 750-Series Control Pod Remote Mounting Kit 113.Connect the 23 m (75 ft) internal 24V power wire harness to P14 on thefiber interface board.4.Connect the 23 m (75 ft) inverter fiber-optic cable to P1 (INV1) on thefiber interface board.Fiber Interface Board Connections 5.Route the 23 m (75 ft) internal 24V power wire harness and inverter fiber-optic cable back to the drive enclosure.6.Install the three Twist-Lock cable supports in the positions shown onpage 12 using the M4 x 12 mm long machine screws supplied.No.Name Description ➊Internal 24V Power Connection Two point connector to P14.➋External 24V Power Connection Optional user-supplied power supply (1) connection to P13. (Three point connector supplied in kit.)(1)Refer to Optional External Power Supply on page 13, for power supply requirements and connection details.➌Inverter Fiber-optic Connection Fiber-optic cable connection to P1 fiber-optic cage INV1 onfiber interface board.IMPORTANT Minimum inside bend radius for fiber-optic cable is 25.4 mm(1 in.). Any bends with a shorter inside radius can permanentlydamage the fiber-optic cable. Signal attenuation increaseswith decreased inside bend radii.12PowerFlex 750-Series Control Pod Remote Mounting Kit7.Connect the internal 24V power connection to the converter terminalblock TB1 mounted on the converter control panel right side wall.8.Connect the inverter fiber-optic cable to the INV fiber-optic transceiveron the inverter power layer interface board. Description➊Internal 24V Power Connection Three point connector to converter terminal block TB1power supply connection.➋Inverter Fiber-optic Connection Fiber-optic cable connector to INV fiber-optic cage onpower layer interface board in card cage.➌Cable Supports Twist-Lock cable supports supplied.PowerFlex 750-Series Control Pod Remote Mounting Kit13Optional External Power SupplyConnect an optional external 24V power supply to P13 using the three positionconnector supplied.External Power Supply ConnectionsInstall Covers 1.Replace the control pod cover.14PowerFlex 750-Series Control Pod Remote Mounting Kit2.If the factory installed control pod was removed from the drive, install thesupport brackets provided in Converter Right Cover (no POD) kit (SK-R1-CCVR2-F8).3.Install the Converter Left Cover if removed.PowerFlex 750-Series Control Pod Remote Mounting Kit15 4.Install the Converter Right Cover (No POD) using the M5 x 14 mm longmachine screws supplied.U.S.Allen-BradleyDrivesTechnicalSupport-Tel:(1)262.512.8176,Fax:(1)262.512.2222,E-mail:*****************,Online: /support/abdrives*PN-124944*PN-124944Publication 750-IN015B-EN-P – September 2011Supersedes 750-IN015A-EN-P – August 2010Copyright © 2011 Rockwell Automation, Inc. All rights reserved. Printed in USA.。
NPort IA5000系列驱动程序(NPort管理套件)发布说明书

Driver for NPort IA5000 Series (NPort Administration Suite) ReleaseNotesSupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsWindows 10, Windows 2000, Windows 7, Windows 8, Windows 8.1, Windows 95, Windows 98,Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2,Windows Server 2012, Windows Server 2012 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports encrypted configuration.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Device search failure when the host has more than 16 IP addresses.• NPort Administration Suite could not be run on Windows 2000.EnhancementsWindows 10, Windows 2000, Windows 7, Windows 8, Windows 8.1, Windows 95, Windows 98,Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2,Windows Server 2012, Windows Server 2012 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports Windows 10.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Updated IPSerial.dll to fix thread handle always existing.• Utility could not monitor devices with "auto save device" setting when restarting the utility.• Utility could not monitor devices with "manual" setting before executing search function.• Ports mapped by the NPort Administration Suite v1.18 or earlier would disappear when using a version of Administration Suite later than v1.18.• Searching by 802.11 WLAN would fail on Windows 7 or later.• The timeout of IPSerial nsio_checkalive function would not work on Windows 7 Ultimate.• Popup error message "The network component is not ready" when searching for an NPort on Windows 8.• Ports could not be sorted by COM number order when clicking the COM number field in the monitor page.• The ports mapped by NPort Administration Suite v1.19 or earlier could not be opened by using a version of Administration Suite later than v1.19.17.EnhancementsWindows 2000, Windows 7, Windows 8, Windows 8.1, Windows 95, Windows 98, Windows ME,Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • IPSerial.dll upgraded to version 1.7.3.• IPSerial added example code for VB2010.• Updated NPort.dll to support NPort P5150A.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsWindows 2000, Windows 7, Windows 8, Windows 95, Windows 98, Windows ME, Windows NT,Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Server 2012,Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports Windows 8 and Windows Server 2012.• Supports "Always Accept Open Request" for Windows 2000 and newer.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Driver caused a BSOD when opening and closing repeatedly in Windows 2008 R2.• Driver caused a BSOD when applications open grouped COM ports which contain one or more disabled ports.• In the COM Grouping function, sometimes HyperTerminal may not read the received data immediately.EnhancementsWindows 2000, Windows 7, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports NPort 5150AI-M12, 5250AI-M12, 5450AI-M12.• Supports LLDP configuration.• Supports Windows publish.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Application will not work properly when logging as a standard user in Windows Vista/7environments. This version will prompt the user change to an account with administrative rights.• Windows 2008 64-bit driver would cause a BSOD when accessing an invalid memory path.• Modified the Georgetown time zone to GMT-04:00, Caracas to GMT-04:30, and Sofia to GMT +02:00.• The "nsio_RTS" function was not able to control RTS signals.EnhancementsWindows 2000, Windows 7, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports NPort P5150A.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• System BSOD when setting and enabling COM grouping functions in Windows 2008 R2.EnhancementsWindows 2000, Windows 7, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports NPort 5600-8-DTL Series.• Supports NPort A Series products in NPort.dll library.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Reduced handle counts when application called nsio_init() from IPSerial library.• When closing COM port and applying change to other COM numbers simultaneously, the NPort administrator utility will cause a hang up.• If the nsio_close() function is called several times and then the nsio_open() function is called, it will fail and return an undefined error code.EnhancementsWindows 2000, Windows 7, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Server 2008 R2, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports Multi-connection by IPSerial library.• Supports Windows 7.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Shortened opening time for COM Grouping.• Shortened setting time for COM Grouping.• Write operation would stop transmitting.• Monitor and port monitor would stop after removing target.EnhancementsWindows 2000, Windows 7, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003, Windows Server 2008, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports COM Grouping function for Windows NT.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• Set IP filter netmask error on Windows x64 platforms.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows Server 2008, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports NPort 5110A, 5130A, 5150A, IA5450A, IA5450AI, IA5150A, IA5150AI, IA5250A, IA5250AI,5210A, 5230A, 5250A.• Supports COM Grouping function (does not support Windows 95/98/ME/NT).New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• "Import COM Mapping" function would throw an "invalid pointer opertion" message.• Monitor function would cause a memory leak.• Adjusted the IRP completion order for multi-processor environments.• Fixed the buffer protection mechanism for issues while inserting special characters in the serial RX buffer.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows Server 2008, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports NPort IA-5250I.New FeaturesN/A• This version also applies to models NPort IA-5250ISupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Upgraded package: IPSerial Library.• Application crash problem with IP serial library when binding more than 8 IPs(alias) for PC.• Loading driver failed in Windows Vista x64.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows Server 2008, Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series N/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• SERIAL_PURGE_TXABORT did not reset the WriteCharsQueued counter.• SIO outqueue count was inaccurate under classic mode.• The port number was incorrect in the "UDP Mode Settings: Destination" list.• Startup of Monitor and Port Monitor may fail.• Removal of Monitor and Port Monitor may fail.• The search function would have issues on a Windows 2003 host with dual LAN cards.• Adding COM port would fail if "SERIALCOMM" registry key was absent.• Invalid argument for time encode.• Access violation problem in "IP Address Report List".• Search function supports 16 IP addresses for local host.• "Alive" status in Monitor and Port Monitor may be incorrect.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series N/ANew FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows Vista, Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports Windows Vista.• Supports 5610-8-DT, 5610-8-DT-J, 5650-8-DT, 5650-8-DT-J and 5650I-8-DT.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Improved IoctlGetCommstatus() to report live out queue count.• Improved utility user interface.• Improved COM setting functions. If the selected ports are in use, no change can be made to them.These settings include: COM number, Tx mode, FIFO, and Fast Flush.• Improved COM setting functions. If the users do not have administrative privileges, they cannot add or delete COM ports. However, they can still view the COM settings and open the COM ports.• Improved utility user interface.• Modem dial out caused system halt on multi-processor platforms.• Driver read operations caused double completion (BSOD) on multi-processor platforms.• GetCommStatus caused a BSOD on multi-processor platforms.• ioctl of setting Xon/Xoff character failed.• Fixed bugs detected by Static Driver Verifier, which include a double completion problem and completion of IRP without releasing the cancel spinlock.• FastFlush setting error when COM port number exceeds 127.• COM Mapping problem when a disabled port is opened.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Added "Network Timeout" function for COM settings.• Added auto message log function.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/A• IOCTL_SERIAL_IMMEDIATE_CHAR bug causing a BSOD.• IOCTL_SERIAL_XOFF_COUNTER bug causing system halt.• Accessible IPs export and import configurations did not match.• IOCTL_SERIAL_IMMEDIATE_CHAR bug causing a BSOD.• IPSerial nsio_write and mutli-port connection problems.• Administrator could not remove serial port settings when uninstalling the NPort Administration Suite.• COM Mapping could not import files exported by Administrator v1.2.• Disconnecting an NPort will crash the application while calling nsio_close.EnhancementsWindows 2000, Windows 95, Windows 98, Windows ME, Windows NT, Windows Server 2003,Windows XPIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports PPP Mode and Real COM Mode (RFC2217) operating mode for NPort 56xx.• Supports 64-bit Windows.• Moved nprcmisic.dll to nport.dll to cover all NPort models.• Supports NPort 5130, 5150, 5650, 5650-S-SC, 5650-M-SC.• Supports SERIAL_LSRMST_ESCAPE and SERIAL_LSRMST_MST event types of IOCTL_SERIAL_LSRMST_INSERT requests. SERIAL_LSRMST_LSR_NODATA and SERIAL_LSRMST_LSR_DATA event types are not supported due to driver limitations.New FeaturesN/AN/ASupported Operating SystemsNotesChangesApplicable ProductsBugs Fixed• Improved Windows 2000/XP/2003 driver "Fast Flush" performance.• Improved disconnection process to prevent application blocking.• Improved NT/2000/XP/2003 driver Ioctl performance (parity, baud, modem...).• High CPU loading with Hyper Threading systems.• COM Mapping rescan prevents some models from being able to be configured.• Port Monitor: When NPort is reconnecting, Administrator increases CPU load to 100%.• Event log lost problem.• IOCTL_SERIAL_SET_WAIT_MASK (npser+114c) BSOD RQL_NOT_LESS_OR_EQUAL problem.• (npser+5c13) BSOD KERNEL_MODE_EXCEPTION_NOT_HANDLED problem.• Verifier testing problem.• Classic mode oqueue length was not correct.• Tx does not stop on network disconnection.• Write blocked after reconnecting.EnhancementsN/AIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • Supports new functions of firmware 2.0.• Added new NPort IA model.• Added Web console toolbar.• Supports IOCTL_SERIAL_XOFF_COUNTER command (Windows 2000/XP/2003), which is used by some 16-bit programs.New Features• Registered COM number usage (Windows 2000/XP/2003). This will avoid other COM device from using the same COM number occupied by this driver.N/ASupported Operating SystemsNotesChangesApplicable ProductsBugs FixedN/AN/AEnhancementsN/AIndustrial Device Servers, NPort 5100 Series, NPort 5100A Series, NPort 5200 Series, NPort 5200A Series, NPort 5400 Series, NPort 5600 Series, NPort 5600-DT Series, NPort 5600-DTL Series • First release.New FeaturesN/AN/A。
HP UPD 打印机驱动程序说明书
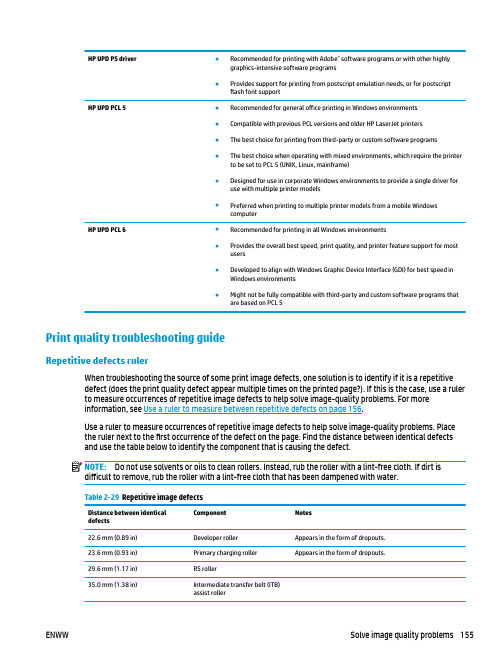
HP UPD PS driver●Recommended for printing with Adobe® software programs or with other highlygraphics-intensive software programs●Provides support for printing from postscript emulation needs, or for postscriptflash font supportHP UPD PCL 5●Recommended for general office printing in Windows environments●Compatible with previous PCL versions and older HP LaserJet printers●The best choice for printing from third-party or custom software programs●The best choice when operating with mixed environments, which require the printerto be set to PCL 5 (UNIX, Linux, mainframe)●Designed for use in corporate Windows environments to provide a single driver foruse with multiple printer models●Preferred when printing to multiple printer models from a mobile WindowscomputerHP UPD PCL 6●Recommended for printing in all Windows environments●Provides the overall best speed, print quality, and printer feature support for mostusers●Developed to align with Windows Graphic Device Interface (GDI) for best speed inWindows environments●Might not be fully compatible with third-party and custom software programs thatare based on PCL 5Print quality troubleshooting guideRepetitive defects rulerWhen troubleshooting the source of some print image defects, one solution is to identify if it is a repetitivedefect (does the print quality defect appear multiple times on the printed page?). If this is the case, use a rulerto measure occurrences of repetitive image defects to help solve image-quality problems. For moreinformation, see Use a ruler to measure between repetitive defects on page 156.Use a ruler to measure occurrences of repetitive image defects to help solve image-quality problems. Placethe ruler next to the first occurrence of the defect on the page. Find the distance between identical defectsand use the table below to identify the component that is causing the defect.Table 2-29 Repetitive image defectsComponent NotesDistance between identicaldefects22.6 mm (0.89 in)Developer roller Appears in the form of dropouts.23.6 mm (0.93 in)Primary charging roller Appears in the form of dropouts.29.6 mm (1.17 in)RS roller35.0 mm (1.38 in)Intermediate transfer belt (ITB)assist rollerENWW Solve image quality problems155Table 2-29 Repetitive image defects (continued)Component NotesDistance between identicaldefects50.0 mm (1.97 in)Secondary transfer roller Appears in the form of dropouts or dirt on the back of thepage.50.0 mm (1.97 in)Large assist roller57.0 mm (2.24 in)Fuser rollers (3)Appears in the form of dirt (front or back of page) or loosetoner.63.0 mm (2.48 in)Photosensitive drum Appears in the form of dirt or dropouts.63.0 mm (2.48 in)Tension roller75.0 mm (2.95 in)Scale78.0 mm (3.07 in)Cartridge station78.0 mm (3.07 in)Intermediate transfer belt (ITB)drive roller712.0 mm (28.03 in)Intermediate transfer belt (ITB)lengthNOTE:The primary charging roller, photosensitive drum, and developer roller cannot be cleaned. If any ofthese rollers are indicated, replace the toner cartridge.Use a ruler to measure between repetitive defectsThe figures in this section shows color repetitive defect pages. However, the process for measuring repetitivedefects is valid for mono pages.1.Identify a repetitive defect on the page.TIP:Print a cleaning page to see if that resolves the defect.The example pages below show the following types of repetitive defects.NOTE:These are examples only, other types of repetitive defects might appear on a page.●Lines (callout 1)●Smudges (callout 2)●Dots or spots (callout 3)156Chapter 2 Solve problems ENWW。
HPLaserJetP1505、P1505n、P1007、P1008打印机驱动及问题解决
HPLaserJetP1505、P1505n、P1007、P1008打印机驱动及问题解决HP LaserJet P1505、P1505n、P1007、P1008打印机驱动及问题解决参考来源:HP官⽹⼀、在Windows XP 下⼿动删除驱动程序⽂章简介电脑上曾经安装过HP LaserJet 激光打印机的驱动程序,重新安装驱动程序之前,需要先删除以前安装的驱动程序,否则可能会出现⽆法找到设备或者安装不上驱动程序的现象。
本⽂介绍了在Windows XP下⼿动删除驱动程序的⽅法。
安装⽹站下载的即插即⽤驱动程序前,建议先⼿动删除打印机驱动程序,然后再安装驱动程序。
适⽤机型HP LaserJet 1018、HP LaserJet 1020、HP LaserJet 1022、HP LaserJet P1505、HP LaserJet P1007、HP LaserJetP1008、HP LaserJet M1319f、HP Colo rLaserJet CP1215 。
操作⽅法依次点击“开始”→“打印机和传真”。
在“打印机和传真”窗⼝中,找到打印机的图标。
注:本⽂以HP LaserJet 1020 激光打印机的操作⽅法为例,其他型号打印机的操作⽅法也可以以此作为参考。
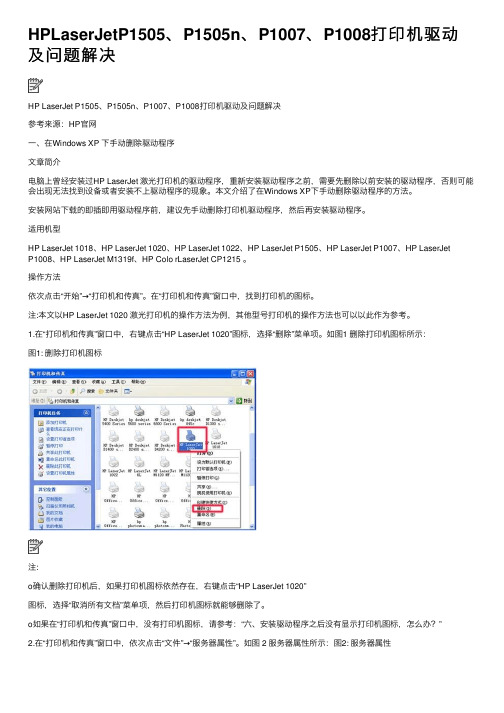
1.在“打印机和传真”窗⼝中,右键点击“HP LaserJet 1020”图标,选择“删除”菜单项。
如图1 删除打印机图标所⽰:图1: 删除打印机图标注:o确认删除打印机后,如果打印机图标依然存在,右键点击“HP LaserJet 1020”图标,选择“取消所有⽂档”菜单项,然后打印机图标就能够删除了。
o如果在“打印机和传真”窗⼝中,没有打印机图标,请参考:“六、安装驱动程序之后没有显⽰打印机图标,怎么办?”2.在“打印机和传真”窗⼝中,依次点击“⽂件”→“服务器属性”。
如图 2 服务器属性所⽰:图2: 服务器属性3.在“打印服务器属性”窗⼝中,点击“驱动程序”选项卡,选择“HP LaserJet 1020”打印机型号,然后点击“删除”按钮。
驱动程序安装方法

驱动程序安装方法驱动程序是计算机硬件设备与操作系统之间的桥梁,它能够让操作系统正确识别和管理硬件设备。
对于新购买或更换了硬件设备的用户来说,正确安装驱动程序是非常重要的。
下面我将介绍几种常见的驱动程序安装方法。
第一种方法是使用光盘安装驱动程序。
许多硬件设备都会附带一张光盘,里面包含了该设备的驱动程序和安装程序。
用户只需要将光盘插入计算机的光驱,然后按照光盘上的提示来进行驱动程序的安装即可。
通常光盘上会有一个"自动安装"的选项,用户只需点击该选项,安装程序就会自动检测并安装所需的驱动程序。
第二种方法是通过设备管理器安装驱动程序。
在Windows操作系统中,有一个设备管理器可以用于管理计算机的硬件设备。
用户可以通过以下步骤来安装驱动程序:1. 打开控制面板,点击"设备管理器"。
2. 在设备管理器中,在"其他设备"或"未知设备"下找到需要安装驱动程序的设备,并右键点击该设备,选择"更新驱动程序软件"。
3. 在弹出的对话框中,选择"浏览我的计算机以查找驱动程序软件"。
4. 浏览计算机的硬盘,找到驱动程序所在的文件夹,然后点击"下一步"。
5. 系统会自动搜索并安装该文件夹中的驱动程序。
如果找到匹配的驱动程序,系统会自动安装并完成安装过程。
第三种方法是通过厂商官网下载并安装驱动程序。
许多硬件设备的制造商都会在自己的官网上提供最新的驱动程序下载。
用户只需前往该制造商的官网,在支持和下载页面找到对应的设备型号,然后下载并安装驱动程序。
这种方法能够确保用户安装的是最新的官方驱动,同时也能避免安装一些附带的不必要的软件。
第四种方法是使用驱动程序管理工具。
有一些第三方软件,如驱动精灵、驱动人生等,能够自动检测计算机上已经安装的硬件设备,并为其提供最新的驱动程序下载。
用户只需下载并安装这些工具,然后运行它们进行扫描和更新驱动程序即可。
HP Color LaserJet CM2320 MFP 系列 说明书

HP Color LaserJet CM2320 MFP 系列用户指南版权与许可© 2008 Copyright Hewlett-Packard Development Company, L.P.未经事先书面许可,严禁进行任何形式的复制、改编或翻译,除非版权法另有规定。
此处包含的信息如有更改,恕不另行通知。
HP 产品及服务的保修仅以随该产品及服务提供的书面保修声明为准。
本文所述任何内容不应被视为附加保修。
对任何技术或编辑错误或者本文所述内容的遗漏,HP 不承担任何责任。
Edition 2, 04/2008部件号:CC434-90928商标声明Adobe®、Acrobat®和 PostScript®是 Adobe Systems Incorporated 的商标。
Microsoft®、Windows®和 Windows NT®均为 Microsoft Corporation 在美国的注册商标。
UNIX®是 The Open Group 的注册商标。
目录1 产品基本信息产品比较 (2)产品功能 (3)产品概览 (4)正视图 (4)后视图 (5)接口端口 (6)2 控制面板HP Color LaserJet CM2320 控制面板 (8)HP Color LaserJet CM2320 MFP 传真型号和 HP Color LaserJet CM2320 MFP 内存卡型号控制面板 (9)控制面板菜单 (10)使用控制面板菜单 (10)控制面板设置菜单 (10)特定功能菜单 (20)3 Windows 软件支持的 Windows 操作系统 (26)Windows 支持的打印机驱动程序 (27)HP 通用打印驱动程序 (UPD) (28)UPD 安装模式 (28)选择适用于 Windows 的正确打印机驱动程序 (29)打印设置优先级 (30)更改 Windows 打印机驱动程序设置 (31)适用于 Windows 的软件安装类型 (32)删除 Windows 软件 (33)Windows 支持的实用程序 (34)HP ToolboxFX (34)内嵌式 Web 服务器 (34)HP Web Jetadmin (34)其它 Windows 组件和实用程序 (34)适用于其它操作系统的软件 (36)4 配合使用产品与 Macintosh用于 Macintosh 的软件 (38)支持的 Macintosh 操作系统 (38)Macintosh 支持的打印机驱动程序 (38)ZHCN iii更改 Macintosh 打印机驱动程序设置 (38)适用于 Macintosh 的软件安装类型 (39)从 Macintosh 操作系统中删除软件 (39)Macintosh 支持的实用程序 (39)使用 Macintosh 打印机驱动程序中的功能 (40)打印 (40)扫描 (42)传真(仅限 HP LaserJet CM2320 传真型号/CM2320 内存卡型号) (43)照片 (43)5 连接方式支持的网络操作系统 (46)USB 连接 (46)打印机共享免责声明 (47)支持的网络协议 (48)在网络上安装产品 (49)配置网络产品 (50)查看设置 (50)更改设置 (50)设置密码 (51)IP 地址 (51)链接速度设置 (52)6 纸张和打印介质了解纸张和打印介质的使用 (54)支持的纸张和打印介质尺寸 (55)支持的纸张类型和纸盘容量 (57)特殊纸张或打印介质规格 (58)装入纸张和打印介质 (59)纸盘 1 (59)纸盘 2 或 3 (60)配置纸盘 (62)7 使用产品功能经济设置 (64)存档打印 (64)字体 (65)选择字体 (65)打印可用字体列表 (65)8 打印任务取消打印作业 (68)使用 Windows 打印机驱动程序中的功能 (69)打开打印机驱动程序 (69)使用打印快捷方式 (69)设置纸张和质量选项 (69)设置文档效果 (69)iv ZHCN获取支持和产品状态信息 (70)设置高级打印选项 (70)更改打印质量设置 (72)打印边到边原件 (73)9 复印装入原件 (76)使用复印功能 (78)单触复印 (78)多份副本 (78)取消复印作业 (78)缩小或放大副本 (79)更改复印整理设置 (80)彩色复印或黑白复印(单色) (80)复印设置 (81)复印质量 (81)定义自定义复印设置 (82)在不同类型和尺寸的介质上复印 (82)恢复默认复印设置 (84)复印书籍 (85)复印照片 (87)复印混合尺寸原件 (88)双面复印作业 (89)自动复印双面文档(仅限 HP Color LaserJet CM2320 MFP 内存卡型号) (89)手动复印双面文档 (90)10 窗口颜色管理颜色 (94)自动 (94)灰度打印 (94)手动颜色调整 (94)颜色主题 (94)匹配颜色 (96)使用 Microsoft Office Basic Colors 调色板匹配颜色 (96)使用 HP 基本配色工具匹配颜色 (96)使用“查看自定义颜色”匹配颜色 (97)使用高级颜色功能 (98)HP ColorSphere 碳粉 (98)HP ImageREt 3600 (98)介质选择 (98)颜色选项 (98)标准红绿蓝 (sRGB) (98)11 扫描装入要扫描的原件 (100)使用扫描功能 (102)扫描方法 (102)使用扫描功能 (102)ZHCN v扫描设置 (108)扫描文件格式 (108)扫描仪分辨率和颜色 (108)扫描质量 (109)扫描书籍 (110)扫描照片 (112)12 传真(仅限传真型号)传真功能 (114)设置 (115)安装和连接硬件 (115)配置传真设置 (117)管理电话簿 (118)设置传真轮询 (121)更改传真设置 (122)设定音量设置 (122)发送传真设置 (122)接收传真设置 (126)使用传真 (131)传真软件 (131)取消传真 (131)从内存删除传真 (132)在 DSL、PBX、ISDN 或 VoIP 系统上使用传真 (132)发送传真 (133)接收传真 (143)解决传真问题 (144)传真错误消息 (144)断电时保持传真内存 (147)传真记录和报告 (147)更改错误纠正和传真速度 (151)发送传真出现问题 (154)接收传真出现问题 (155)执行问题 (157)13 照片插入内存卡 (160)更改内存卡默认设置 (162)直接从内存卡打印照片 (163)打印内存卡缩略图页 (165)从校样页打印和扫描照片 (166)14 管理和维护产品信息页 (168)HP ToolboxFX (170)查看 HP ToolboxFX (170)状态 (171)警报 (172)产品信息 (173)vi ZHCN帮助 (176)系统设置 (177)打印设置 (179)网络设置 (180)电子邮件 (180)嵌入式 Web 服务器 (181)功能 (181)使用 HP Web Jetadmin 软件 (182)安全功能 (183)使用内嵌式 Web 服务器可以启用密码保护功能。
HP全系列笔记本驱动大全

HP全系列笔记本驱动大全!惠普HP V3608TX,V3609TX,V3610TX笔记本驱动下载For XPftp:///pub/softpaq/sp35501-36000/sp35677.exe NVIDIA® GeForce® Go 8400 Driver显卡/display/nvidia_gf8400_fw10134_xp32.zip Intel Matrix Storage Managerftp:///pub/softpaq/sp36001-36500/sp36334.exe Intel SATA AHCI Controller Driverftp:///pub/softpaq/sp36001-36500/sp36131.exe Microsoft Universal Audio Architecture (UAA) Bus Driver for High Definition Audio UAA总线驱动ftp:///pub/softpaq/sp33501-34000/sp33566.exe Conexant High Definition Audio Driverftp:///pub/softpaq/sp35501-36000/sp35682.exe Conexant HDAUDIO Soft Data Fax Modem with SmartCP Driver 调制解调器ftp:///pub/softpaq/sp34501-35000/sp34777.exe Marvell Network Adapter Driver 网卡/drivers/upload/yk51x86.zip Intel PRO/Wireless Drivers 无线网卡ftp:///pub/softpaq/sp34001-34500/sp34489.exe HP Quick Launch Buttons 快捷键工具ftp:///pub/softpaq/sp33001-33500/sp33258.exe Synaptics Touchpad 触摸板ftp:///pub/softpaq/sp35001-35500/sp35444.exe Ricoh 5-in-1 Card Reader Host Controller 读卡器ftp:///pub/softpaq/sp32501-33000/sp32825.exe2V3624,V3625,V3626,V3629,V3631,V3632驱动For XP主板的... /Wi ... _630a_14.10_Int.exe 显卡/displ... orceGo_156.56xp.exe 显卡2(如果您的显卡无法正常工作,请尝试使用)/nvidia/155series/15655.exe Conexant High Definition Audio Driver 声卡ftp:///pub/softpaq/sp35501-36000/sp35682.exe Conexant HDAUDIO Soft Data Fax Modem with SmartCP Driver 调制解调器ftp:///pub/softpaq/sp33501-34000/sp33839.exe Broadcom Wireless LAN Driver 无线网卡ftp:///pub/softpaq/sp34001-34500/sp34152.exe HP Quick Launch Buttons 快捷键工具ftp:///pub/softpaq/sp33001-33500/sp33258.exe Synaptics Touchpad 触摸板ftp:///pub/softpaq/sp35001-35500/sp35444.exe Ricoh 5-in-1 Card Reader Host Controller 读卡器ftp:///pub/softpaq/sp33001-33500/sp33020.exe HP Battery Check 电池工具(可选)ftp:///pub/ [table=94%][tr][td][/td][/tr][tr][td=2,1]惠普2510p驱动程序 for XP芯片组ftp:///pub/softpaq/sp35501-36000/sp35677.exe----uaa--ftp:///pub/softpaq/sp33501-34000/sp33867.exe声卡ftp:///pub/softpaq/sp36001-36500/sp36218.exe快捷键ftp:///pub/softpaq/sp35501-36000/sp35581.exe显卡ftp:///pub/softpaq/sp36001-36500/sp36411.exe网卡驱动ftp:///pub/softpaq/sp36001-36500/sp36267.exeMODEM ftp:///pub/softpaq/sp36001-36500/sp36004.exe触摸板ftp:///pub/softpaq/sp35001-35500/sp35444.exe无线网卡-请您首先尝试下载intel的无线网卡,如果安装出现问题,请安装Broadcom版本 --intel ftp:///pub/softpaq/sp35001-35500/sp35426.exe--Broadcom ftp:///pub/softpaq/sp34001-34500/sp34152.exe读卡器ftp:///pub/softpaq/sp36001-36500/sp36254.exe保护工具安装套件(包含指纹管理软件)ftp:///pub/softpaq/sp35501-36000/sp35628.exe指纹设备ftp:///pub/softpaq/sp36001-36500/sp36237.exe Intel SATA AHCI Controller Driver :ftp:///pub/softpaq/sp36001-36500/sp36132.exelang=en&cc=de&prodNameId=3356623&prodTypeId=321957&prodSeriesId=3368539&swEnvOID=1093&taskId=135&sw Lang=2 ---------------------------------------中文网站驱动列表------------------------------------------- 声卡 ---uaa---ftp:///pub/softpaq/sp32501-33000/sp32646.exe声卡驱动ftp:///pub/softpaq/sp35001-35500/sp35475.exe显卡ftp:///pub/softpaq/sp35001-35500/sp35359.exe网卡ftp:///pub/softpaq/sp35001-35500/sp35378.exe快捷键ftp:///pub/softpaq/sp34001-34500/sp34157.exe触摸板ftp:///pub/softpaq/sp35001-35500/sp35444.exe移动数据保护ftp:///pub/softpaq/sp34001-34500/sp34081.exe读卡器ftp:///pub/softpaq/sp35501-36000/sp35605.exe无线网卡ftp:///pub/softpaq/sp34001-34500/sp34152.exe保护工具安装套件(包含指纹管理软件)ftp:///pub/softpaq/sp35501-36000/sp35628.exe*如果您的指纹识别系统安装了保护工具套件仍然无法使用,请下载安装 AuthenTec Fingerprint Driver ftp:///pub/softpaq/sp32501-33000/sp32609.exe 请注意:由于官方网站上没有提供Modem的XP驱动,请您尝试下载NX6325代替使用,链接如下,需要您手动指定安装 MODEM ftp:///pub/softpaq/sp33001-33500/sp33050.exe如果您的modem仍然无法使用,可以尝试使用如下链接 Modem ftp:///pub/softpaq/sp33501-34000/sp33914.exe惠普笔记本HP Pavilion dv2621,dv2622,dv2623.dv2624笔记本XP驱动下载主板驱动ftp:///pub/softpaq/sp35501-36000/sp35677.exe Microsoft Universal Audio Architecture (UAA) ftp:///pub/softpaq/sp33501-34000/sp33566.exe Conexant High Definition Audio Driver 声卡ftp:///pub/softpaq/sp33501-34000/sp33543.exe Conexant HDAUDIO Soft Data Fax Modem with SmartCP Driver 调制解调器ftp:///pub/softpaq/sp34501-35000/sp34777.exe NVIDIA® GeForce® Go 8400 Driver显卡/display/nvidia_gf8400_fw10134_xp32.zip Intel PRO Network Adapter Driver 网卡/drivers/upload/yk51x86.zip cIntel PRO/Wireless Drivers 无线网卡ftp:///pub/softpaq/sp34001-34500/sp34489.exe Intel Matrix Storage Managerftp:///pub/softpaq/sp36001-36500/sp36334.exe Intel SATA AHCI Controller Driverftp:///pub/softpaq/sp36001-36500/sp36131.exe HP Quick Launch Buttons 快捷键工具ftp:///pub/softpaq/sp33001-33500/sp33258.exe Synaptics Touchpad 触摸板ftp:///pub/softpaq/sp34001-34500/sp34473.exe HP Pavilion Webcam Driver 摄像头ftp:///pub/softpaq/sp33501-34000/sp33544.exe Ricoh 5-in-1 Card Reader Host Controller 读卡器ftp:///pub/softpaq/sp32501-33000/sp32825.exe纹管理软件 Bioscrypt VeriSoft Access Manager ftp:///pub/softpaq/sp35501-36000/sp35640.exe LightScribe Host Software光雕软件ftp:///pub/softpaq/sp35001-35500/sp35384.exe HP Battery Check 电池工具(可选)ftp:///pub/softpaq/sp32001-32500/sp32299.exe惠普工程师提供NX6325中英文驱动大全:声卡 ---uaa---/local_drivers/24178/sp32646.exe声卡驱动/local_drivers/24143/SP32906.exe显卡/local_drivers/24250/sp33074.exe MODEM/local_drivers/24253/sp33050.exe网卡/local_drivers/24255/sp32632.exe无线网卡/local_drivers/24256/sp33008.exe读卡器辅助程序/local_drivers/24439/SP33416.exe读卡器/local_drivers/24000/SP32020.exe触摸板/local_drivers/24185/SP32647.exe指纹识别管理程序--如果想使用指纹识别系统,请首先安装/local_drivers/24268/SP32946.exe指纹识别/local_drivers/24628/sp32654.exe------------------------------------------英文网站驱动列表---------------------------------------------- 声卡 ---uaa---ftp:///pub/softpaq/sp32501-33000/sp32646.exe声卡驱动ftp:///pub/softpaq/sp32501-33000/sp32906.exe显卡ftp:///pub/softpaq/sp33001-33500/sp33074.exe MODEM/local_drivers/24253/sp33050.exe网卡ftp:///pub/softpaq/sp32501-33000/sp32632.exe无线网卡ftp:///pub/softpaq/sp34001-34500/sp34152.exe快捷键ftp:///pub/softpaq/sp33001-33500/sp33035.exe读卡器辅助程序ftp:///pub/softpaq/sp33001-33500/sp33416.exe读卡器ftp:///pub/softlib/sof ... 43536-1/sp32017.exe 触摸板ftp:///pub/softpaq/sp32501-33000/sp32647.exe指纹识别管理程序--如果想使用指纹识别系统,请首先安装ftp:///pub/softpaq/sp32501-33000/sp32946.exe指纹识别ftp:///pub/softpaq/sp33501-34000/sp33833.exe以下是指着棺材跳舞提供惠普HPV3742,V3743笔记本XP驱动下载c 主板驱动ftp:///pub/softpaq/sp36001-36500/sp36492.exewww. X3100显卡ftp://ftp.hpsoftpaq/sp35501-36000/sp35810.exe DIntel Matrix Storage Managerftp:///pub/softpaq/sp36001-36500/sp36334.exe Intel SATA AHCI Controller Driverftp:///pub/softpaq/sp36001-36500/sp36131.exe UAA总线驱动ftp:///pub/softpaq/sp33501-34000/sp33566.exe声卡ftp:///pub/softpaq/sp35501-36000/sp35682.exe调制解调器ftp:///pub/softpaq/sp34501-35000/sp34777.exe网卡/drivers/upload/yk51x86.zip无线网卡ftp:///pub/softpaq/sp34001-34500/sp34489.exe捷键工具ftp:///pub/softpaq/sp33001-33500/sp33258.exe触摸板 oftp:///pub/softpaq/sp35001-35500/sp35444.exe摄像头ftp:///pub/softpaq/sp33501-34000/sp33544.exe读卡器5ftp:///pub/softpaq/sp32501-33000/sp32825.exe电池工具(可选)ftp:///pub/softpaq/sp32001-32500/sp32299.exe驱动请按顺序安装hp3643 笔记本驱动惠普 hp3643 笔记本驱动下载地址,以下驱动是惠普工程师发的,请大家放心下载使用。
Rapid Link 4.0电子驱动系统产品介绍说明书

Rapid Link 4.0 Brings yourMaterials Handling Efficiently Up To DateRapid Link 4.0Distributed, Electronic Drive SystemProduct Information RAMO and RASP 4.0The tailored solution for every applicationWhether its an airport, indus-trial manufacturing or logistics: The new Rapid Link 4.0 drive system has the tailored soluti-on for every conveying engin-eering environment.All variants of the compact electronic motor starter RAMO and the frequency inverter RASP feature a common foot-print for total installation flexi-bility. The frequency inverterRASP is available in various power classes for different are-as of application. A version with a device fan is available for am-bient temperatures of 55 °C.Versatility on a square: The new enclosure concept Eaton makes the installation and the expansion of Rapid Link 4.0 particularly simple and efficient with a unique and flexible enclosure concept.All motor starters up to 3 kW as well as all frequency inver-ters up to 2.2 kW feature the same square form factor and consequently feature identical mounting dimensions. Only a single fixing bracket type is required for the entire Rapid Link 4.0 range.Incomer flexibility is provided with attachment from the left, right, top or bottom. And because the dimensions and connections are identical, themotor starters and frequency inverters can be exchanged by one another when you are extending the installation.This simplifies installation, speeds up commissioning and reduces costs.Rapid connectionPlug-in connection cables with standardized sockets reduce the wiring effort and support the simple installation conceptfor material handling systems.Rapid Link 4.0 – The New Generation of FlexibilityRapid Link 4.0 is intelligent and modularly expandable – e. g. for demanding conveyor technology at airports and in logisticsStandardized installation, Plug and Play parametric programming directly on site and networked communication – these are the demands placed on modern drive engineering. Eaton delivers a modern answer with the distributed electronic drive system Rapid Link 4.0. With its flexible power spectrum, its simple handling and its intelligent programming options, this new motor starter and frequency inverter generation is the first choice for all kinds ofconveying technology applications.One form factor for all versions and tasks• Q uicker planning through installation design simplicity • U pgrades, exchange and modifications are cost-effective with little installation effort• F lexible routing of the energy and motor cables• N o derating of the electrical characteristics with side-mounting• C ontrols and heat sink always in the optimum positionVariable mounting – for demand-driven installationPractice-oriented optimiza-tion – the new functionality Whether electronic or frequency- control, Rapid Link 4.0 optimizes the handling during installation and operation with new design features.The starters are optionally avail-able with an integrated, lockable switch disconnector. For main-tenance purposes the Rapid Link 4.0 unit and motor can be quickly and safely disconnected from the electrical power source.Reliable maximum performanceAll devices stand out with their improved electrical values.The service life of the electro-nic starter of the RAMO 4.0 has almost tripled in comparison to the predecessor version – with up to 10 million switching ope-rations at 3 kW. Even the hourly switching frequency has been enhanced to over 3,000.With its degree of protection IP 65, the electronic drive sys-tem Rapid Link 4.0 can also be operated non-enclosed, distributed and directly on the conveying system in harsh industrial environments, which significantly enhances the flexibility of the installation configuration.Autonomous, distributed intelligenceThe new generation of fre-quency inverter RASP is alsoavailable as a version with integrated braking resistor (chopper).The RASP also supports any speeds with variable accelera-tion and delay.The RASP can switch from U/f control to speed control. And thanks to its own on-board intel-ligence, reoccurring sequences can, for example, be permanent-ly stored, which considerably reduces the software engineer-ing requirement in the PLC.Rapid Link 4.0 quickly and cost-effectively adapts to conversions and modifications, e. g. in industrial manufacturing anddistribution logistics.New, easily accessible repair and maintenance switchSafe setting toautomatic or manual modeSetting forforward or reverseSerial RJ 45 interface for direct communication(with RASP) as well as DIP switchPlug and Play plug connections: M12 ASI interface Sensor input 1Actuator output/fan supply Sensor input 2Optional inputEnergy/motor cable connections (left, bottom, right possible) Comprehensive diagnostics using coloured LEDsFrequency controlled motor starter RASP 4.0Performance Features OverviewCurrent measured values such as motor current or frequency are clearly graphically displayed in real-time.The comfortable comparison function allows quick and clear ergonomic reproduction of modified parameter settings.Parameters that have been saved can be edited “offline” without the frequency inverter.With the new Rapid Link 4.0 external keypad, parameters are copied to any number of devices on site using the Plug and Play principle – even simpler and faster installation of distributed drive engineering is hardly possible.With its non-volatile parameter memory, the simple handlingand an extremely compact and light design, the Rapid Link 4.0 external keypad becomes an irreplaceable companion in the field.This does not just apply for installation and commissioning, but also during regular opera-tion of the installation.Comfortable and convenient – configuration with the user-friendly MAX-Connect PC software The serial RJ 45 frequency inverter interface directly opens two communication paths: comprehensive and comfortable using a Notebook or faster and more portable with an external keypad. Configuration and copying of parameters, even from device to device, as well as the display of setpoint and actual values andreading of the alarm memory are possible at any time on site.Rapid Link 4.0 is the robust, reliabledrive system under all operating conditions –e.g. in logistics centresAlways there, ready to use – the Rapid Link 4.0 external keypad with non-volatile memory Networked CommunicationEaton addresses worldwide: /address E-Mail: *******************Internet: Published by:Eaton CorporationElectrical Sector – EMEA Eaton Industries GmbH Hein-Moeller-Str. 7–11 D-53115 Bonn© 2011 by E aton Industries GmbH Subject to alteration FL04011001Z-ENPrinted in Germany (03/2011)Article No.: 1549434015081516810Eaton CorporationEaton Corporation is a leading power manage-ment company. Eaton is a global leader with products, systems and services for the electri-cal, hydraulic, aerospace, truck and automotive fields.Eatons Electrical SectorEaton‘s electrical sector is one of the world‘s leading manufacturers and suppliers of com-ponents and systems concerned with power distribution and automation in industrial, infra-structure and residential building applications, in institutional, government, utility, commer-cial, residential, and OEM markets worldwide. Eaton‘s electrical sector include the product lines Cutler-Hammer ®, Moeller ®, Micro Innovation, Powerware ®, Holec ®, MEM ® and Santak ®. Disclaimer and limitation of liabilityThe information, recommendations, descriptions and safety instructions in this document are based on the experiences and assessments of Eaton Corporation (“Eaton”) and may not necessarily consider all eventua-lities. Should you require further information, pleasecontact an Eaton sales office. Sale of the products shown and described in these documents are subject to the terms and conditions of the Eaton sales policy or other contractual agreements between Eaton and the purchaser. There are no agreements either expressed or implied, including any implied warranties of merchantability or fitness for a particular purpose, except those already expressly agreed in an agreement existing between the parties concerned. Eaton shall have no liability for dama-ges, whether in contract or in tort (including negligence), of any direct, indirect, incidental, special, exemplary or consequential damages or losses of any kind – including, but not limited to, damage or economic loss to devices, installations and power equipment, for financial losses, power outages, additional costs associated with thecontinued usage of existing power installations, or claims for damages by the purchaser, operator or their clients – or any damages or losses of any kind that have arisen from the use of the information, recommendations or descriptions contained herein. Any such agreement satis-fies the obligations arising for Eaton. The content of this document forms neither part of the contract nor does it amend the contract between the parties. We reserve the right to amend the information contained in this document. Photographs, diagrams and illustrations serve only for the purpose of information and justify no liability, obligation or responsibility on the part of Eaton.。
3030 型打印机 扫描器单元 操作说明书 打印机参考

简介 本手册包含本设备操作使用的详细说明和注意事项。为了您的安全和利益, 请在使用本设备之前仔细阅 读本手册。将本手册放在垂手可得之处以备快速参考。 重要事项 本手册的内容如有变动,恕不另行通知。对于因操作和使用本设备而导致的直接的、间接的、特殊的、 偶然的或必然的损失,本公司概不负责。 切勿复制或印刷法律禁止翻印的任何项目。 通常,本地法律禁止复制或印刷以下项目: 纸币,印花税票,债券,股票,银行汇票,支票,护照,驾驶执照。 以上只是举例并不包括所有项目。 我们对其完整和精确不承担责任。 如果您对复制或印刷某些项目的 法律性有任何疑问,请联络您的法律顾问。 警告 如果不按照本手册所述控制、调整或执行步骤,则可能导致危险的辐射伤害。 本手册内使用两种尺寸标注。对于本设备,请参照公制尺寸标注。 商标 Microsoft®、 Windows® 和 Windows NT® 是 Microsoft Corporation 在美国和 / 或其它国家的注册商标。 Adobe®、PostScript®、Acrobat®、PageMaker® 和 Adobe Type Manager 是 Adobe Systems Incorporated 的注 册商标。 PCL® 是 Hewlett-Packard Company 的注册商标。 Apple、AppleTalk、EtherTalk、Macintosh、Mac OS 和 TrueType 是 Apple Computer, Inc. 在美国和其他国 家注册的商标。 Rendezvous 是 Apple Computer, Inc. 的商标。 IPS-PRINTTM Printer Language Emulation© 版权所有 2000, Oak Technology, Inc. 保留所有权利。 UNIX 是在美国和其他国家的注册商标,通过 X/Open Company Limited 获得专有许可。 Bluetooth® 字标和标示属 Bluetooth SIG, Inc. 所有,Ricoh Company, Ltd. 对此类标示的使用已经过许可。 NetWare 是 Novell, Inc. 的注册商标。 本手册涉及的其它产品名称只用作识别目的, 有可能分别是相应公司的商标。我们否认对这些标记拥有 任何部分或全部权利。 Windows 操作系统的正确名称如下所示: • Windows® 95 的产品名称是 Microsoft® Windows® 95 • Windows® 98 的产品名称是 Microsoft® Windows® 98 • Windows® Me 的产品名称是 Microsoft® Windows® Millennium Edition (Windows Me) • Windows® 2000 的产品名称如下所示: Microsoft® Windows® 2000 Professional Microsoft® Windows® 2000 Server Microsoft® Windows® 2000 Advanced Server • Windows® XP 的产品名称如下所示: Microsoft® Windows® XP Home Edition Microsoft® Windows® XP Professional • Windows ServerTM 2003 的产品名称如下: Microsoft® Windows ServerTM 2003 Standard Edition Microsoft® Windows ServerTM 2003 Enterprise Edition Microsoft® Windows ServerTM 2003 Web Edition • Windows NT® 4.0 的产品名称如下: Microsoft® Windows NT® Workstation 4.0 Microsoft® Windows NT® Server 4.0 注 本手册中的一些图例可能会因机器不同而略有差异。 在某些国家出售的机型上可能没有某些选购件。更详细的信息,请您与当地的经销商联系。
数据分发服务在分布式嵌入式系统中的研究与设计

文章编号:16711742(2011)01007205数据分发服务在分布式嵌入式系统中的研究与设计苏伟,杨斌(西南交通大学信息科学与技术学院,四川成都610031)摘要:分布式系统越来越广泛地应用于嵌入式设备,尤其是在航空航天事业、交通控制等方面。
而这些应用场合嵌入式系统的体系结构呈现以网络为中心的趋势,这便对通信的实时性、动态灵活性提出更高要求,同时要求分布式嵌入式系统各参与者之间采用一种具有松散耦合特性和灵活的通信模式和交互机制。
针对此问题,介绍R TI公司推出的一套支持出版/订阅设计思想的应用程序接口;同时设计并搭建了一个解决此分布异构问题的平台,该平台为应用程序设计人员提供了一个更高层次的设计空间,允许应用程序的程序员通过即插即用组件的方式编程完成各个参与者相互间的通讯;而且整个系统的设计更满足高效和实时性的要求。
关键词:计算机应用技术;嵌入式与分布式;分布异构;数据分发服务;中间件;分布式通信;VxWorks中图分类号:TP316.4文献标识码:A 收稿日期31引言随着Internet 技术的广泛应用和计算机技术的飞速发展,嵌入式系统趋向复杂化和多样性,分布式系统越来越广泛的应用于工业中,由于工业设备本身和控制保护设备的要求更为严格和更为复杂,大多数的设备底层都使用复杂的操作系统,这样不仅使工业控制程序变得更加复杂,也使应用软件程序开发人员面对各种各样的开发环境,不能将注意力集中在自己的业务上,程序在不同系统软件上的移植做大量的重复工作,增加了技术负担。
这样不但开发过程复杂,开发周期也增大了,对系统的维护,运行和管理也要花费大量的工作,增加了大量的开发成本[1]。
另外,计算机技术的高速发展和更新换代也导致系统处理器的更新换代,以及不同处理器结构的硬件环境对通信介质的要求也是不相同的,软件开发人员不仅要面临不同硬件开发环境的烦恼,还要面对不同通信介质数据规范的不同而在软件设计时要进行复杂的重复性工作,甚至在系统需要增加新的应用时,对原来的工作就会有很大影响,甚至以前的大量工作都需要重新进行设计。
MP-Series (Series A和B)和TL-Series电动铰链器替换部件目录说明书

Installation InstructionsOriginal InstructionsMP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsCatalog Numbers MPAR-NA3210C, MPAR-NA323C, MPAR-NA4012C, MPAR-NA405C, MPAR-NA6310C, MPAR-NA6320C, MPAR-NP3210B, MPAR-NP323B, MPAR-NP4012B, MPAR-NP405B, MPAR-NP6310B, MPAR-NP6320B, TLY-A1xxx -B-X19x , TLY-A2xxx -B-X19x , TLY-A3xxx -B-X xxxMPL-x 1520F-V-X20x , MPL-x 1530F-V-X20x , MPL-x 220F-V-X2xx , MPL-x 330F-M-X21x , MPL-x 420F-M-X21x,MPAR-X1xxx B, MPAR-X1xxx E, MPAR-X2xxx C, MPAR-X2xxx F, MPAR-X3xxx E, MPAR-X3xxx HCAbout the MP-Series (Series A and B) and TL-Series Electric Cylinder Replacement PartsElectric cylinders have three replaceable parts; the motor, actuator cylinder, and the transmission component. For inline-mount electric cylinders, the transmission component is the coupler and for parallel-mount electric cylinder, it is a belt. Instructions in this manual cover the replacement of these components.TopicPage About the MP-Series (Series A and B) and TL-Series Electric Cylinder Replacement Parts 1Catalog Number Explanation 2Before You Begin4Replace Inline-mount Electric Cylinder Motor4Replace Inline-mount Electric Cylinder Coupling or Actuator Cylinder 6Replace a Parallel-mount Electric Cylinder Motor or Belt 9Additional Resources13MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsCatalog Number ExplanationReplacement CouplingsReplacement Coupling Cat. No.Electric Cylinder with InlineMotor Attributes Use with Electric CylinderCat. No.Frame SizeBall Screw Pitchmm/rev (in./rev)MPAR-NA3210C3210.0 (0.394)MPAR-x1xxx E-xx AMPAR-NA323C 3.0 (0.118)MPAR-x1xxx B-xx AMPAR-NA4012C4012.7 (0.500)MPAR-x2xxx F-xx AMPAR-NA405C 5.0 (0.197)MPAR-x2xxx C-xx AMPAR-NA6310C6310.0 (0.394)MPAR-x3xxx E-xx AMPAR-NA6320C20.0 (0.787)MPAR-x3xxx H-xx A Replacement BeltsReplacement Belt Cat. No.Electric Cylinder with Motor Mounted in Parallel AttributesUse with Electric CylinderCat. No.Frame SizeBall Screw Pitchmm/rev (in./rev)MPAR-NP3210B3210.0 (0.394)MPAR-x1xxxE-xxB/D/EMPAR-NP323B 3.0 (0.118)MPAR-x1xxxB-xxB/D/EMPAR-NP4012B4012.7 (0.500)MPAR-x2xxxF-xxB/D/EMPAR-NP405B 5.0 (0.197)MPAR-x2xxxC-xxB/D/EMPAR-NP6310B6310.0 (0.394)MPAR-x3xxxE-xxB/D/EMPAR-NP6320B20.0 (0.787)MPAR-x3xxxH-xxB/D/E Replacement Motors for TLAR-Series Electric CylindersReplacement Motor Cat. No.Electric Cylinder AttributesUse with Electric CylinderCat. No.Frame SizeBall Screw Pitchmm/rev (in./rev)BrakeTLY-A130F-B-X191323.0 (0.118)None TLAR-A1xxxB-x2xTLY-A130F-B-X19224V Brake TLAR-A1xxxB-x4xTLY-A220F-B-X19310.0 (0.394)None TLAR-A1xxxE-x2xTLY-A220F-B-X19424V Brake TLAR-A1xxxE-x4xTLY-A220F-B-X195405.0 (0.197)None TLAR-A2xxxC-x2xTLY-A220F-B-X19624V Brake TLAR-A2xxxC-x4xTLY-A230F-B-X19712.7 (0.5)None TLAR-A2xxxF-x2xTLY-A230F-B-X19824V Brake TLAR-A2xxxF-x4xTLY-A310F-B-X1996310.0 (0.394)None TLAR-A3xxxE-x2xTLY-A310F-B-X20024V Brake TLAR-A3xxxE-x4xTLY-A310F-B-X20120.0 (0.787)None TLAR-A3xxxH-x2xTLY-A310F-B-X20224V Brake TLAR-A3xxxH-x4x2Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts Replacement Motor for MPAR-Series Electric CylindersReplacement Motor Cat. No.Electric Cylinder Attributes Use with Electric CylinderCat. No.Voltage Class Frame Size Pitch mm/rev (in./rev)BrakeMPL-A1520F-V-X203200323.0 (0.118)None MPAR-A1xxxB-x2xMPL-A1520F-V-X20424V Brake MPAR-A1xxxB-x4xMPL-A1530F-V-X20510.0 (0.394)None MPAR-A1xxxE-x2xMPL-A1530F-V-X20624V Brake MPAR-A1xxxE-x4xMPL-A1530F-V-X207405.0 (0.197)None MPAR-A2xxxC-x2xMPL-A1530F-V-X20824V Brake MPAR-A2xxxC-x4xMPL-A220F-V-X20912.7 (0.50)None MPAR-A2xxxF-x2xMPL-A220F-V-X21024V Brake MPAR-A2xxxF-x4xMPL-A330F-M-X2116310.0 (0.394)None MPAR-A3xxxE-x2xMPL-A330F-M-X21224V Brake MPAR-A3xxxE-x4xMPL-A420F-M-X21320 (0.787)None MPAR-A3xxxH-x2xMPL-A420F-M-X21424V Brake MPAR-A3xxxH-x4x MPL-B1520F-V-X215400323.0 (0.118)None MPAR-B1xxxB-x2xMPL-B1520F-V-X21624V Brake MPAR-B1xxxB-x4xMPL-B1530F-V-X21710.0 (0.394)None MPARBA1xxxE-x2xMPL-B1530F-V-X21824V Brake MPAR-B1xxxE-x4xMPL-B1530F-V-X219405.0 (0.197)None MPAR-B2xxxC-x2xMPL-B1530F-V-X22024V Brake MPAR-B2xxxC-x4xMPL-B220F-V-X22112.7 (0.50)None MPAR-B2xxxF-x2xMPL-B220F-V-X22224V Brake MPAR-B2xxxF-x4xMPL-B330F-M-X2236310.0 (0.394)None MPAR-B3xxxE-x2xMPL-B330F-M-X22424V Brake MPAR-B3xxxE-x4xMPL-B420F-M-X22520.0 (0.787)None MPAR-B3xxxH-x2xMPL-B420F-M-X22624V Brake MPAR-B3xxxH-x4x Replacement ActuatorReplacement Actuator Cat. No.Electric Cylinder Attributes Use with Electric CylinderCat. No.Frame Size Pitch mm/rev (in./rev)Stroke Length mm (in.)MPAR-X1100B323.0 (0.118)100TLAR/MPAR-x1xxxB-xxxMPAR-X1200B200TLAR/MPAR-x1xxxB-xxx MPAR-X1300B300TLAR/MPAR-x1xxxB-xxx MPAR-X1400B400TLAR/MPAR-x1xxxB-xxxMPAR-X1100E10.0 (0.394)100TLAR/MPAR-x1xxxE-xxxMPAR-X1200E200TLAR/MPAR-x1xxxE-xxxMPAR-X1300E300TLAR/MPAR-x1xxxE-xxxMPAR-X1400E400TLAR/MPAR-x1xxxE-xxxRockwell Automation Publication MPAR-IN004A-EN-P - March 201834Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsBefore You BeginBefore you begin, use the Catalog Number Explanation to verify that the replacement parts match the electric cylinder that you are attempting to repair. Read through the procedure before you start a repair or replacement.Replace Inline-mount Electric Cylinder MotorThis procedure applies to Bulletin MPAR-xxxxxx-xx A and TLAR-xxxxxx-xx A electric cylinders.T o replace the motor, do the following.1.Disconnect motor and feedback cables.2.Remove the four bolts that secure the motor to the motor flange.3.Remove the bolt from the coupling hub on the motor shaft.4.Remove the coupling hub from the motor shaft.5.Clean the replacement motor shaft with a soft cloth that is damped with isopropyl alcohol.6.Position the coupling hub on the replacement motor e the dimension from the table on page 5.MPAR-X2100C 405.0 (0.197)100TLAR/MPAR-x2xxxC-xxx MPAR-X2200C 200TLAR/MPAR-x2xxxC-xxx MPAR-X2300C 300TLAR/MPAR-x2xxxC-xxx MPAR-X2400C 400TLAR/MPAR-x2xxxC-xxx MPAR-X2600C 600TLAR/MPAR-x2xxxC-xxx MPAR-X2100F 12.7 (0.50)100TLAR/MPAR-x2xxxF-xxx MPAR-X2200F 200TLAR/MPAR-x2xxxF-xxx MPAR-X2300F 300TLAR/MPAR-x2xxxF-xxx MPAR-X2400F 400TLAR/MPAR-x2xxxF-xxx MPAR-X2600F 600TLAR/MPAR-x2xxxF-xxx MPAR-X3100E 6310.0 (0.344)100TLAR/MPAR-x3xxxE-xxx MPAR-X3200E 200TLAR/MPAR-x3xxxE-xxx MPAR-X3300E 300TLAR/MPAR-x3xxxE-xxx MPAR-X3400E 400TLAR/MPAR-x3xxxE-xxx MPAR-X3600E 600TLAR/MPAR-x3xxxE-xxx MPAR-X3800E 800TLAR/MPAR-x3xxxE-xxx MPAR-X3100H 20.0 (0.787)100TLAR/MPAR-x3xxxH-xxx MPAR-X3200H 200TLAR/MPAR-x3xxxH-xxx MPAR-X3300H 300TLAR/MPAR-x3xxxH-xxx MPAR-X3400H 400TLAR/MPAR-x3xxxH-xxx MPAR-X3600H 600TLAR/MPAR-x3xxxH-xxx MPAR-X3800H800TLAR/MPAR-x3xxxH-xxxIMPORTANTApply Loctite 222 to bolts ≤ M4 and Loctite 242 for bolts ≥ M5 during assembly steps.Replacement ActuatorReplacement Actuator Cat. No.Electric Cylinder AttributesUse with Electric Cylinder Cat. No.Frame SizePitch mm/rev (in./rev)Stroke Length mm (in.)Rockwell Automation Publication MPAR-IN004A-EN-P - March 20185MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts7.T orque the coupling bolt to the value as shown in the following table.8.Align the coupling, the motor, and the actuator cylinder, then push them together.9.Attach the motor to the motor mount flange by using all four bolts.10.T orque the bolts as shown in the following table.Cat. No.X 1(1)mm (in.)(1)Tolerance is ± 0.25 mm (0.010 in.).Torque N•m (lb•in)Cat. No.X 1(1)mm (in.)Torque N•m (lb•in)MPAR-x 1xxx B-xx A 18.5 (0.73) 4.0 (35.4)TLAR-A1xxx B-B x A25.0 (0.98)0.6 (5.31)MPAR-x 1xxx E-xx A TLAR-A1xxx E-B x A 28.8 (1.13) 4.0 (35.4)MPAR-x 2xxx C-xx A 19.5 (0.77)TLAR-A2xxx C-B x A 29.8 (1.17)MPAR-x 2xxx F-xx A 22.3 (0.88)TLAR-A2xxx F-B x AMPAR-x 3xxx E-xx A 35.5 (1.40)8.0 (70.8)TLAR-A3xxx E-BxA 30.5 (1.20)8.0 (70.8)MPAR-x 3xxx H-xx A35.2 (1.38)TLAR-A3xxx H-B x ACat. No.Bolt SizeTorque N•m (lb•in)Cat. No.Bolt Size Torque N•m (lb•in)MPAR-x 1xxxx-xx A M5 x 205.9 (52.2)TLAR-A1xxx B-B x A M4 x162.9 (25.6)MPAR-x 2xxx C -xx A TLAR-A1xxx E-B x A M5 x165.9 (52.2)MPAR-x 2xxx F-xx A TLAR-A2xxx C-B x A MPAR-x 3xxx E-xx A M6 x 259.9 (87.6)TLAR-A2xxx F-B x A MPAR-x 3xxx H-xx AM8 x 2524.0 (212.4)TLAR-A3xxx E-B x A M6 x 209.9 (87.6)TLAR-A3xxx H-B xA6Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsReplace Inline-mount Electric Cylinder Coupling or Actuator CylinderThis procedure applies to Bulletin MPAR-xxxxxx-xx A and TLAR-xxxxxx-xx A electric cylinders.T o replace the coupling or an actuator cylinder, do the following.1.Disconnect the motor and feedback cables.2.Disassemble the motor, motor flange, and coupling housing, using the following diagram.Replace Only the CouplingIf you are replacing the coupling only, do following. If replacing the actuator cylinder, go to Replace Only the Actuator Cylinder on page 7.1.Remove the coupling hubs from the motor and actuator.2.Pull apart the new coupling.3.Insert the new gear ring in one of the coupling hubs.4.Position the coupling hub with diameter that matches the diameter of the motor shaft on the shaft.IMPORTANTApply Loctite 222 to bolts ≤ M4 and Loctite 242 for bolts ≥ M5 during assembly steps.Item Description Item Description 1Motor 4Coupling housing 2Coupling hub 5Gear ring 3Motor flange6Actuator cylinder1Rockwell Automation Publication MPAR-IN004A-EN-P - March 20187MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts5.Position the coupling hub with diameter that matches actuator cylinder shaft on the shaft.6.Tighten the clamping bolts on both the coupling hubs to the specified torque.Continue with Assemble the Electric Cylinder on page 8.Replace Only the Actuator Cylinder1.Remove the coupling hub from the actuator cylinder.2.Remove the bolt from the coupling hub.3.Position the coupling hub on the shaft of the actuator cylinder. Use the dimension that is shown on the table in step 6 on page 7.4.Tighten the coupling hub bolt to the torque shown on the table in step 6 on page 7.Continue with Assemble the Electric Cylinder on page 8.Cat. No.X 1 (1)mm (in.)(1)Tolerance is ± 0.25 mm (0.010 in.).Y 1 (1)mm (in.)Torque N•m (lb•in)Cat. No.X 1 (1)mm (in.)Y 1 (1)mm (in.)Torque N•m (lb•in)MPAR-x 1xxx B 18.5 (0.73)19.3 (0.76)4.0 (35.4)TLAR-x 1xxx B25.0 (0.98)16.8 (0.66)0.6 (5.31)MPAR-x 1xxx E TLAR-x 1xxx E 28.8 (1.13)19.3 (0.76) 4.0 (35.4)MPAR-x 2xxx C 19.5 (0.77)18.3 (0.72)TLAR-x 2xxx C 29.8 (1.17)18.3 (0.72)MPAR-x 2xxx F 22.3 (0.88)TLAR-x 2xxxFMPAR-x 3xxx E 35.5 (1.4)27.0 (1.06)8.0 (70.8)TLAR-x 3xxx E 30.5 (1.20)27.0 (1.06)8.0 (70.8)MPAR-x 3xxx H35.2 (1.38)TLAR-x 3xxxHUse the dimension from the table.MotorActuator Cylinder8Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsAssemble the Electric Cylinder1.2.T orque the bolts as shown in the following table.3.Attach the motor flange by using the required number of bolts.See table in following the step for the bolt quantity.4.T orque the bolts as shown in the following table.Cat. No.Bolt SizeTorque N•m (lb•in)Cat. No.Bolt SizeTorque N•m (lb•in)MPAR-x1xxxx-xxA M6 x 304.2 (37.17)TLAR-A1xxxB-BxA M6 x 204.2 (37.17)MPAR-x2xxxC-xxA TLAR-A1xxxE-BxA MPAR-x2xxxF-xxA TLAR-A2xxxC-BxA MPAR-x3xxxE-xxA M8 x 407.8 (69)TLAR-A2xxxF-BxA MPAR-x3xxxH-xxATLAR-A3xxxE-BxA M8 x 407.8 (69)TLAR-A3xxxH-BxACat. No.Bolt QuantityBolt SizeTorque N•m (lb•in)Cat. No.Bolt QuantityBolt Size Torque N•m (lb•in)MPAR-x1xxxx-xxA 4M4 x 122.9 (25.6)TLAR-A1xxxB-BxA 4M3 x 121.2 (10.6)MPAR-x2xxxC-xxA TLAR-A1xxxE-BxA M4 x 162.9 (25.6)MPAR-x2xxxF-xxA TLAR-A2xxxC-BxA MPAR-x3xxxE-xxA M6 x 209.9 (87.6)TLAR-A2xxxF-BxA MPAR-x3xxxH-xxA3TLAR-A3xxxE-BxA M6 x 169.9 (87.6)TLAR-A3xxxH-BxARockwell Automation Publication MPAR-IN004A-EN-P - March 20189MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts5.Align the coupling, the motor, and the actuator cylinder and push them together.6.Attach the motor to the motor mount flange by using all four bolts.7.T orque bolts as follows.Replace a Parallel-mount Electric Cylinder Motor or BeltThis procedure is for Bulletin MPAR-xxxxxx-xx B/D/E and TLAR-xxxxxx-xx B/D/E electric cylinders. These steps can be used to change the motor or the actuator cylinder orientation.Follow these steps to replace the belt, motor, or actuator cylinder.1.Disconnect the motor and feedback cables.2.If the motor has brake, release the brake on motor so that the rod moves freely.3.Position the rod to the center of travel.Cat. No.Bolt SizeTorque N•m (lb•in)Cat. No.Bolt Size Torque N•m (lb•in)MPAR-x 1xxxx-xx A M5 x 205.9 (52.2)TLAR-A1xxx B-B x A M4 x 162.9 (25.6)MPAR-x 2xxx C -xx A TLAR-A1xxx E-B x A M5 x 165.9 (52.2)MPAR-x 2xxx F-xx A TLAR-A2xxx C-B x A MPAR-x 3xxx E-xx A M6 x 259.9 (87.6)TLAR-A2xxx F-B x A MPAR-x 3xxx H-xx AM8 x 2524.0 (212.42)TLAR-A3xxx E-B x A M6 x 209.9 (87.6)TLAR-A3xxx H-B x AIMPORTANTApply Loctite 222 to bolts ≤ M4 and Loctite 242 for bolts ≥M5 during assembly steps.10Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts4.Remove the cover from belt housing.5.Loosen, but do not remove the four blots that hold the motor to the belt housing. The tension is relieved on the belt.6.Remove the pulleys and the belt.Use a wrench to hold the pulley in place while turning the collar clockwise with a hex driver.The pulley has a left-hand thread.ATTENTION: Exposed parts that move can cause severe injury. Do not operate the electric cylinder without the cover in place. Follow the lock-out procedures before servicing the machine.Rockwell Automation Publication MPAR-IN004A-EN-P - March 201811MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement Parts7.If you are changing the motor or actuator cylinder orientation, follow steps 7a through 7e; if not, go to step 8.a.Remove the bolts from the motor or actuator cylinder. Be sure to collect the square nuts if you are removing the motor.b.Reposition the motor and or actuator cylinder.c.Attach the actuator cylinder with four bolts.d.T orque the actuator cylinder bolts to values shown in the following table.e.Attach the motor by using four bolts and four square nuts.Do not tighten bolts now.8.Place the spacer rings, belt, and pulleys on the shafts.Bottom out the pulleys to make them parallel.9.Hold the pulleys with a wrench and tighten the collar by turning the hex key counter-clockwise to the torque shown in the following table.10.Apply pressure to the base of the motor to tension the belt.IMPORTANTIf you are mounting the motor with the connectors between the actuator cylinder and the motor, rotate the motor connectors so they exit 180° away from the shaft.Cat. No.Bolt SizeTorque N•m (lb•in)Cat. No.Bolt SizeTorque N•m (lb•in)MPAR-x 1xxx B -xx B/D/E M6 x 184.2 (37.17TLAR-A1xxx B-B x B/D/E M6 x 184.2 (37.17)MPAR-x 1xxx E -xx B/D/E TLAR-A1xxx E-B x B/D/E MPAR-x 2xxx C -xx B/D/E TLAR-A2xxx C-B x B/D/E MPAR-x 2xxx F-xx B/D/E TLAR-A2xxx F-B x B/D/E MPAR-x 3xxx E-xx B/D/E M8 x 207.8 (69)TLAR-A3xxx E-B x B/D/E M8 x 207.8 (69)MPAR-x 3xxx H-xx B/D/ETLAR-A3xxx H-B x B/D/ECat. No.Torque N•m (lb•ft)Cat. No.Torque N•m (lb•ft) MPAR-x 1xxx B -xx B/D/E 16.95 (13)TLAR-A1xxx B-B x B/D/E 13.56 (10)MPAR-x 1xxx E -xx B/D/E TLAR-A1xxx E-B x B/D/E 16.95 (13)MPAR-x 2xxx C-xx B/D/E TLAR-A2xxx C-B x B/D/E MPAR-x 2xxx F-xx B/D/E 67.79 (50) TLAR-A2xxx F-B x B/D/E MPAR-x 3xxx E-xx B/D/E TLAR-A3xxx E-B x B/D/E 67.79 (50)MPAR-x 3xxx H-xx B/D/ETLAR-A3xxx H-B xB/D/E12Rockwell Automation Publication MPAR-IN004A-EN-P - March 2018MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsObserve the distances of X and Y and determine this transition precisely.The following table shows the recommend belt tension values.11.While a maintaining tension on the belt, torque the motor bolts to value specified in following table.12.Secure the cover to the belt housing with five bolts.Cat. No.Tension N (lb)Cat. No.Tension N (lb)MPAR-x 1xxx B -xx B/D/E 30 (6.75)TLAR-A1xxx B-B x B/D/E 35 (7.9)MPAR-x 1xxx E -xx B/D/E 61 (13.73)TLAR-A1xxx E-B x B/D/E 61 (13.7)MPAR-x 2xxx C-xx B/D/E 67 (15.10)TLAR-A2xxx C-B x B/D/E 67 (15.1)MPAR-x 2xxx F-xx B/D/E 90 (20.23)TLAR-A2xxx F-B x B/D/E 149 (33.5)MPAR-x 3xxx E-xx B/D/E 162 (36.4)TLAR-A3xxx E-B x B/D/E 162 (36.4)MPAR-x 3xxx H-xx B/D/E224 (50.4)TLAR-A3xxx H-B x B/D/E216 (48.5)IMPORTANT A low pretension force is better than a high pretension force.Excessive pretension on the belt results in:•impermissible radial loads causing shaft to break •increased wear in the axis and motor gearings •reduction of the service life of the beltCat. No.Bolt SizeTorque N•m (lb•in)Cat. No.Bolt Size Torque N•m (lb•in)MPAR-x 1xxx B -xx B/D/E M5 x 165.9 (52.2)TLAR-A1xxx B-B x B/D/E M4 x 122.9 (25.6)MPAR-x 1xxx E -xx B/D/E TLAR-A1xxx E-B x B/D/E M5 x 355.9 (52.2)MPAR-x 2xxx C-xx B/D/E TLAR-A2xxx C-B x B/D/E MPAR-x 2xxx F-xx B/D/E M5 x 20TLAR-A2xxx F-B x B/D/E MPAR-x 3xxx E-xx B/D/E M6 x 189.8 (87.6)TLAR-A3xxx E-B x B/D/E M6 x 189.9 (87.6)MPAR-x 3xxx H-xx B/D/EM8 x 2024.0 (212.0)TLAR-A3xxx H-B xB/D/ENot tensioned: X <YTensioned: X = YRockwell Automation Publication MPAR-IN004A-EN-P - March 201813MP-Series (Series A and B) and TL-Series Electric Cylinders Replacement PartsAdditional ResourcesThese documents contain additional information concerning related products from Rockwell Automation.Y ou can view or download publications at /literature . T o order paper copies of technical documentation, contact your local Allen-Bradley distributor or Rockwell Automation sales representative.ResourceDescriptionTL-Series™ Electric Cylinders Installation Instructions,publication TLAR-IN001Information on how to install TL-Series electric cylinders and product and performance specifications.MP-Series™ Brushless Servo Motor Installation Instructions, publication MP-IN001Information on how to install, medium frame (100…165mm) MP-Series low-inertia motors.MP-Series Brushless Servo Motor Installation Instructions, publication MP-IN006Information on how to install small frame (<75 mm) MP-Series low-inertia motors.Product Certifications website,/global/certification/overview.pageProvides declarations of conformity, certificates, and other certification details.Allen-Bradley, MP-Series, Rockwell Automation, Rockwell Software, and TL-Series are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Rockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, T el: +90 (216) 5698400Rockwell Automation maintains current product environmental information on its website at/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page .Publication MPAR-IN004A-EN-P - March 2018Copyright © 2018 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.Rockwell Automation SupportUse the following resources to access support information.Documentation FeedbackY our comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete the How Are W e Doing? form at /idc/groups/literature/documents/du/ra-du002_-en-e.pdf .Technical Support CenterKnowledgebase Articles, How-to Videos, FAQs, Chat, User Forums, and Product Notification Updates.https:///Local Technical Support Phone Numbers Locate the phone number for your country./global/support/get-support-now.page Direct Dial Codes Find the Direct Dial Code for your product. Use the code to route your call directly to a technical support engineer./global/support/direct-dial.page Literature LibraryInstallation Instructions, Manuals, Brochures, and Technical Data./global/literature-library/overview.page Product Compatibility and Download Center (PCDC)Get help determining how products interact, check features and capabilities, and find associated firmware./global/support/pcdc.page。
CDS V Command Series DC伺服馬達驅動器使用說明書说明书

CDS V Command SeriesMADE IN TAIWAN(一) 安裝說明.................................................P1.P2(二) 規格說明.................................................P3.P4(三) PC板零件配置圖............................................P5(四) 系統流程圖...................................................P6(五) 電源供應說明................................................P7(六) 驅動器與馬達的選配說明.................................P8(七) 速度迴授電壓規格的選配說明...........................P9(八) 信號及配線說明....................................P10~P20(九) 保護功能及狀態說明...............................P21.P22(十) 調整說明.............................................P23~P27 (十一) 選項功能說明....................................P28~P34 (十二) 運轉異常排除說明..............................P35~P36註:此說明書內容若遇有修改或增列項目時,新設內容會以增頁方式 貼於最後頁的Memo欄內,敬請留意。
謝謝您的惠顧如您所知粗糙的驅動裝置,不僅會降低系統的伺服性能,更會損傷伺服馬達卻常被忽略;因此我們嚴謹的設計了CDS系列伺服驅動器,它俱有高效率的驅動裝置及周全的系統保護功能,對於驅動品質及人、機操作安全上均能提供優異的表現,同時對於DC有刷馬達常被垢病的電刷磨耗問題;更設計許多獨到的維護措施,大幅提升電刷的維護及使用時限,在某些應用場合比起時下許多AC無刷伺服系統,常有更耐久的表現,尤其對於低轉速,高扭力及動作線性要求較高的場合,CDS系列伺服驅動器,相信是您最可靠而實惠的選擇。
GE Fanuc Automation Inc. Series 90 以太网驱动程序 GP-Pro

GE Fanuc Automation Inc.Series 90 Ethernet驱动程序1系统配置 (3)2选择外接控制器 (6)3通讯设置示例 (7)4设置项目 (13)5支持的寄存器 (17)6寄存器和地址代码 (18)7错误消息 (19)简介本手册介绍如何连接人机界面和外接控制器(目标PLC)。
在本手册中,将按以下章节顺序介绍连接步骤:1系统配置)“1 系统配置” (第3页)本节介绍可连接的外接控制器和串口的类型。
2选择外接控制器)“2 选择外接控制器” (第6页)选择要连接的外接控制器的机型(系列)以及连接方式。
3通讯设置示例)“3 通讯设置示例” (第7页)本节给出连接人机界面和外接控制器的设置示例。
4设置项目)“4 设置项目” (第13页)本节介绍人机界面上的通讯设置项目。
请使用GP-Pro EX或在离线模式下进行人机界面的通讯设置。
操作1系统配置给出GE Fanuc Automation的外接控制器和人机界面连接时的系统配置。
系列名称CPU通讯接口串口类型设置示例Series 90-30 CPU311CPU313CPU323CPU331CPU340CPU341CPU350CPU351CPU352CPU360CPU363CSE311CSE313CSE323CSE331CSE340IC693CMM321以太网(TCP)“设置示例1”(第7页)CPU364CPU374CPU上的以太网接口 “设置示例2”(第9页)Series 90-70 CPU731CPU771CPU772CPU780CPU781CPU782CPU788CPU789CPM790CPM915CPM925CSE784CSE924CSE925CPX772CPX782CPX928CPX935CGR772CGR935IC697CMM742(Type2)“设置示例1”(第7页)PACSystems RX7i CPE010CPE020CRE020CPU上的以太网接口“设置示例3”(第11页)连接配置•1:1连接•1:n连接本。
PowerFlex 753 驱动程序紧急更新 (修订版 6.003)说明书

Release NotesPowerFlex 753 Drives (revision 6.003)These release notes correspond to major revision 6, minor revision 3 of firmwarefor PowerFlex® 753 drives.Introduction The following information is included in this document:For information about:See page:Determining Firmware Revision Level2Using the Drive LCD HIM2Using DriveExplorer Lite/Full3Using DriveExecutive3Firmware Flashing4Installing the Flash Kit4Using DriveExplorer Lite/Full to Flash Update5Using DriveExecutive to Flash Update6Using ControlFLASH to Flash Update8Using HyperTerminal to Flash Update10Enhancements15Corrected Anomalies15Known Anomalies15Rockwell Automation Support16PowerFlex 753 Drives (revision 6.003)Determining Firmware Revision Level This section describes procedures to determine the firmware revision of your PowerFlex 753 drive.Using the Drive LCD HIM1.Access the Status screen, which is displayed on HIM power up. Figure 1 - Status Screene the or key to scroll to Port 00 for the Host Drive.3.e the or key to scroll to the DIAGNOSTIC folder.5.Device V ersion.6.FW Revision is listed under –Main Control Board; see Figure 2. Figure 2 - Device Version Information Screen00Stopped0.00 HzAUTOHost Drive480V 2.1A20F...D2P1ESC REF TEXTFPAR#Stopped0.00 HzAUTOESCFPowerFlex 753Product Revision 1.007Product Ser Num 00000000–Main Control BoardFW Revision 5.001TOP END PGUP PGDN2Rockwell Automation Publication 750-RN024A-EN-P - June 2012Rockwell Automation Publication 750-RN024A-EN-P - June 20123PowerFlex 753 Drives (revision 6.003)Using DriveExplorer Lite/Fullunch DriveExplorer and go online with the PowerFlex 753 drive. T o connect to the drive, use a 1203-USB converter, a 1203-SSS converter, or an EtherNet/IP network connection.2.In the Devices hardware view, select the PowerFlex 753 drive.Once selected, information regarding the PowerFlex 753 drive is shown in the right panel including the current firmware revision number.Using DriveExecutiveunch DriveExecutive and go online with the PowerFlex 753 drive. T o connect to the drive, use a 1203-USB converter, a 1203-SSS converter, or an EtherNet/IP network connection.2.In the Drives hardware view, select the PowerFlex 753 drive (X in Figure 3 on page 4).3.Click the information icon (Y in Figure 3) to display the drive’s Properties dialog box.In the Properties dialog box, the “Revision:” field (Z in Figure 3) will show the drive’s current firmware revision number.IMPORTANT You need DriveExplorer version 6.02 or later to interface with thePowerFlex 753 drive. To obtain the latest version, visit the Allen-Bradley Web Updates site located at/support/abdrives/webupdate .IMPORTANT You need DriveExecutive version 5.02 or later to interface with thePowerFlex 753 drive. To obtain the latest version, visit the Allen-Bradley Web Updates site located at/support/abdrives/webupdate .4Rockwell Automation Publication 750-RN024A-EN-P - June 2012PowerFlex 753 Drives (revision 6.003)Figure 3 - Accessing the PowerFlex 753 Drive Firmware Revision Number Firmware FlashingThis section describes procedures to flash upgrade your drive firmware. Flash kits for drives are provided on the Allen-Bradley W eb Updates site located at /support/abdrives/webupdate .Flashing can be performed using a 1203-USB or 1203-SSS converter. For information on connecting either converter to your drive, refer to the 1203-USB USB Converter User Manual, publication DRIVES-UM001 or the 1203-SSS Smart Self-powered Serial Converter User Manual, publication 20COMM-UM001.Installing the Flash Kit 1.Install the flash kit utility from the Allen-Bradley Web Updates site for the PowerFlex 753 drive, which includes the latest version of the ControlFLASH utility and deploys firmware files for using HyperT erminal on your computer.2.Y ou are now ready to use DriveExplorer, DriveExecutive, ControlFLASH or HyperT erminal to update the drive. Refer to the respective section and follow the instructions.Z X YPowerFlex 753 Drives (revision 6.003) Using DriveExplorer Lite/Full to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit), launchDriveExplorer and go online (via a 1203-USB or 1203-SSS converter)with the PowerFlex 753 drive.2.In the Drives hardware view, select the PowerFlex 753 drive (X in Figure3on page4).3.Click the information icon (Y in Figure 3) to display the drive’s Propertiesdialog box.4.In the Properties dialog box, click the Details tab.5.With the Main Control Board selected, click Flash Update. Array IMPORTANT Flash updating the device firmware may cause the device to loaddefaults. It is recommended that you save the setting to your PC beforeproceeding.Rockwell Automation Publication 750-RN024A-EN-P - June 201256Rockwell Automation Publication 750-RN024A-EN-P - June 2012PowerFlex 753 Drives (revision 6.003)6.From the list of available updates, select “v6.003.xxx ” and click Next >.7.Follow the remaining prompts until the flash update procedure completes and displays the new firmware ing DriveExecutive to Flash Update 1.With the Flash Kit installed (see Installing the Flash Kit ), launch DriveExecutive and go online (via a 1203-USB or 1203-SSS converter) with the PowerFlex 753 drive.2.In the Drives hardware view, select the PowerFlex 753 drive (Y in Figure 3 on page 4).3.Click the information icon (Z in Figure 3) to display the drive’s Properties dialog box.4.In the Properties dialog box, click the Component Details tab.5.With the PowerFlex 753 drive selected, click Flash Update .PowerFlex 753 Drives (revision 6.003)6.From the list of available devices, select the PowerFlex 753 drive and clickNext >.IMPORTANT Flash updating the device firmware may cause the device to loaddefaults. It is recommended that you save the setting to your PC beforeproceeding.7.From the list of available updates, select “v6.003.xxx” and click Next >.8.Follow the remaining prompts until the flash update procedure completesand displays the new firmware revision.Rockwell Automation Publication 750-RN024A-EN-P - June 20127PowerFlex 753 Drives (revision 6.003)Using ControlFLASH to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit on page4), launchControlFLASH by selecting Start > (All) Programs > FlashProgramming T ools > ControlFLASH.2.On the ControlFLASH Welcome dialog box, click Next >.3.The Catalog Number dialog box appears. From the list, choose thecommunication device you will use to update the PowerFlex 753 drive. Inthe figure below, the embedded EtherNet device is selected.Once the appropriate communication device is selected, click Next >.8Rockwell Automation Publication 750-RN024A-EN-P - June 2012Rockwell Automation Publication 750-RN024A-EN-P - June 20129PowerFlex 753 Drives (revision 6.003)4.Now that the correct communication device has been selected, you mustselect which device is being updated. With the Select the PowerFlex… dialog box displayed, follow these steps.a.Expand the hardware view for the communication path you are using (X in Figure 4).b.Select the drive icon that represents the PowerFlex 753 drive you are updating (Y in Figure 4).c.Click OK (Z in Figure 4).Figure 4 - Selecting the Correct Drive to Flash 5.In the Multiple Assemblies Found display box, select“Port x -PowerFlex 753” from the list and click OK.ZXY10Rockwell Automation Publication 750-RN024A-EN-P - June 2012PowerFlex 753 Drives (revision 6.003)6.In the Firmware Revision dialog box, select “v6.003…” from the list of available updates and click Next >.7.Follow the remaining prompts until the flash procedure completes and displays the new firmware revision ing HyperTerminal to Flash Update1.With the Flash Kit installed (see Installing the Flash Kit on page 4), access and launch HyperT erminal as shown below.IMPORTANT The HyperTerminal process takes at least one hour to complete.PowerFlex 753 Drives (revision 6.003)2.A New Connection dialog box appears.a.Enter the connection device name in the Name field or select an iconfrom the library.b.Click OK once you have finished.3.A Connect T o dialog box appears,e the “Connect using:” drop-down menu to select the appropriateconnection device.b.Click OKonce you have finished.Rockwell Automation Publication 750-RN024A-EN-P - June 20121112Rockwell Automation Publication 750-RN024A-EN-P - June 2012PowerFlex 753 Drives (revision 6.003)4.A Properties dialog box will appear for the selected connection e any of the drop-down menus to change the various port settings.b.Click OK once you have finished.5.After you click OK, you will get a blank screen. Press Enter on your computer keyboard so the following test screen appears.6.From the Main Menu, select the flash upgrade (X in Figure 5 on page 13) by pressing the number 3 key on your computer keyboard.7.Additional text appears. From the Flash Upgrade menu, select the PowerFlex 753 drive (Y in Figure 5) by pressing the number 0 key on your computer keyboard.8.Additional text appears. After reading the conditions, select Yes (Z in Figure 5) to proceed by pressing the letter Y key on your computer keyboard.Rockwell Automation Publication 750-RN024A-EN-P - June 201213PowerFlex 753 Drives (revision 6.003)Figure 5 - HyperTerminal Test Screen DialogueThe terminal program will start displaying the letter “C”. This signals theXMODEM protocol that the download may proceed. You then have oneminute to start the transfer.9.Select T ransfer > Send File to display the Send File screen.10.Click Browse and navigate toC: > Program Files > ControlFLASH > 0001 > 0086 > 049011.Search through the subfolder until the “PF753_LP_App_v6_003_xxx .dpi”file appears in the Select File to Send list. IMPORTANT You have one minute to complete steps 9…14 or HyperTerminal will return to step 5, where you must repeat steps 5…8.TIPTo cancel the flash update at any time, press CTRL-X.Z XY14Rockwell Automation Publication 750-RN024A-EN-P - June 2012PowerFlex 753 Drives (revision 6.003)12.With the file name highlighted, click Open so it appears in the Filename data field in the Send File dialog box.13.In the Protocol box, select “Xmodem.”14.Click Send .A dialog box appears and reports the progress of the update. This process takes at least one hour for HyperT erminal to complete. When it is complete, the message “Flash Complete” appears.15.Press any key to continue.16.Press the Enter key to return to the main menu.PowerFlex 753 Drives (revision 6.003) Enhancements This revision of drive firmware does not contain any enhancements. Corrected Anomalies This section describes the anomalies corrected in this revision.New FPGA DesignThis revision of firmware includes a new Field Programmable Gate Aray (FPGA)design.The FPGA design contained in firmware revision 6.002 contained an anomalythat affected low power (frame 1…7) PowerFlex 755 drives. It did not affectPowerFlex 753 drives. However, the new FPGA design is deployed in firmwarerevision 6.003 for both PowerFlex 755 and 753 drives.Known Anomalies This section describes the known anomalies that are present in this revision.Feedback SelectionThe HIM startup on the PowerFlex 753 drive includes a feedback deviceselection step. Depending on the option modules installed, that step may first askthe user to choose a port, then a parameter. In some situations, the list of portsincorrectly shows multiple copies of “Port 0 - PowerFlex 753” followed by thefeedback port/module.The incorrect behavior happens only under the following conditions:•It is the first time that startup feedback selection has been run sinceflashing the drive.•The feedback module is a dual encoder and no other option modules areinstalled.• A reset to defaults of the drive NVS parameters has not been performedsince the drive was last flashed.When the incorrect port list appears, it is still possible to successfully select thefeedback module port by following one of these methods.•Scroll past the multiple copies of Port 0 to reach the desired feedbackmodule.•Press the Esc soft key to back up one screen, then select “Feedback” andpress the Enter soft key to display the port selection screen a second time.This time the correct list will be shown.Rockwell Automation Publication 750-RN024A-EN-P - June 201215Publication 750-RN024A-EN-P – June 2012Copyright © 2012 Rockwell Automation, Inc. All rights reserved. Printed in USA.U.S.Allen-BradleyDrivesTechnicalSupport-Tel:(1)262.512.8176,Fax:(1)262.512.2222,E-mail:*****************,Online: /support/abdrivesDiagnostic Item and Parameter Values Affected by Flash fromVersion 1 to Version 6The following internal diagnostic items may contain incorrect data afterupgrading a PowerFlex 753 from revision 1 to revision 6 firmware: 2 [PBLTPwrup Time], 3 [PBLT GatesOn Time], 4 [PBLT Mtr MW Hrs], 5 [PBLT RgnMW Hrs] and 67 [PwrBd Pwr Cycles].The following parameters may contain incorrect data after upgrading aPowerFlex 753 from revision 1 to revision 6 firmware: 13 [Elapsed MWH], 14[Elapsed kWH], 15 [Elapsed Run Time], 16 [Elpsd Mtr MWHrs], 17 [ElpsdRgn MWHrs], 18 [Elpsd Mtr kWHrs], 19 [Elpsd Rgn kWHrs], 490 [HSFanElpsdLife], 497 [InFan ElpsdLife], 503 [MtrBrngElpsdLife], 508[MtrLubeElpsdHrs], 512 [MchBrngElpsdLife] and 517 [MchLubeElpsdHrs].These values will affect the associated calculated “remaining life” parametervalues and predictive maintenance events.Rockwell AutomationSupport T o assist you, Rockwell Automation provides technical information on the web.At /support , you can find technicalmanuals, a knowledge base of Frequently Asked Questions (FAQs), technical and application notes, sample code and links to software service packs, and aMySupport feature you can customize to make the best use of these tools.Rockwell Automation also provides complimentary phone support for drives,option modules, and peripherals. If you experience a problem with an optionmodule, please review its documentation. For further help, contact a CustomerSupport representative:For an additional level of technical phone support for installation, configuration, and troubleshooting, we offer T echConnect Support programs. For moreinformation, contact your local distributor or Rockwell Automationrepresentative, or visit /support .United States(1) 262.512.8176Monday – Friday, 7am – 6pm CST Outside United States Please contact your local Rockwell Automation representative for any technical support issues.。
M-Series操作手册说明书
M108 - Enable Override ControlsM108 re-enables the feedrate override and/or spindle speed override controls if they were disabled with M109. A parameter of “1” indicates the feedrate override; “2” indicates the spindle speed override.Example:M109/1/2 ; disables feedrate and spindle speed overridesM108/1 ; re-enables feedrate overrideM108/2 ; re-enables spindle speed overrideM109 - Disable Override ControlsM109 disables the feedrate override and/or spindle speed override controls. It may be used before tapping with G85 to assure that the machine runs at the programmed feedrate and spindle speed. It is not necessary to specify M109 with G74 or G84; those cycles automatically disable and re-enable the override controls. M109 cannot be used in MDI mode.Example:M3 S500 ; start spindle in clockwise direction, at 500 rpmF27.78 ; set feedrate for 18 pitch tapM109/1/2 ; disable feedrate and spindle speed overridesG85 X0 Y0 R.1 Z-.5 ; tap a holeM108/1/2 ; re-enable overridesM115/M116/M125/M126* – Protected Move Probing Functions The protected move probing functions provide the capability to program customized probing routines.The structure for these commands is: Mnnn /Axis pos P p F f L1Where:nnn is either 115, 116, 125, or 126.Axis is a valid axis label, i.e., X, Y, Z, etc.pos is an optional positionP is a PLC bit number, which can be negative.F* is a feedrate (in units per minute.)L1* options for the M115/M116 commands that prevents an error if the probe does not detect a surfaceQ1 is an option for M115/M116 that forces the DSP probe to move a “Recovery Distance” on retries. (See Machine Parameter 13 for “Recovery Distance”)Note: the Q1 option only applies for DSP ProbesFor M115 and M116 functions, the indicated axis will move to pos (if specified) until the corresponding PLC bit p state is 1, unless p is negative, in which case movement is until the PLC bit state is 0(closed). A “p value” of 1 to80 (or -1 to -80) specifies PLC bits INP1-INP80. Warnings are generated in the CNC software message window for"Missing P value" and "Invalid P value." If “pos” is not specified, M115 will move the axis in the negative direction, and M116 will move the axis in the positive direction. Note if “pos” is specified, then if does not matter whether M115 or M116 is used. Regardless of whether or not pos is specified, movement is bound by the settings in the software travel limits as well the maximum probing distance (Machine Parameter 16).For M125 and M126 protected move functions, the behavior is identical to that of the M115 and M116 commands, except in regards to the PLC bit state. The M115 and M116 commands are to be used when one expects contact to be made and M125 and M126 commands are to be used when one does not expect any contact to be made.Example:Finding the center of a vertical slot. In this example, it is assumed that there is a probe connected to INP15 andthat the probe tip is positioned somewhere in the slot, such that movement along the X-axis will cause a probetrigger.M115/X P-15 F20 ; Move X minus at 20 ipm until probe tripM116/X P15 F5 ; Move X plus at 5 ipm until probe clears#100 = #5041 ; Record the point in user variable #100M116/X P-15 F20 ; Move X plus at 20 ipm until probe tripM115/X P15 F5 ; Move X minus at 5 ipm until probe clearsX[[#100+#5041]/2] ; Move X to center of slot*Usage is slightly different when using a DSP type probe. Please see below for dissimilarities between a standard DP4 probe and the DSP type probe.*M115/M116/M125/M126 - DSP Probe specific informationBefore attempting to use the protected move probing functions with a DSP type probe, please be sure to familiarize yourself with the DSP probe configuration in Chapter 9 of this manual. Using the protected probing moves with a DSP type probe may yield unexpected results if you do not fully understand the concepts and guidelines discussed in the DSP probe configuration section.If the control is configured to use a DSP type probe, all M115/M116 moves will perform window checking andrepeat on a failed window. On a failed window, a repeat attempt is made by returning to the starting point of the move.Protected move probing functions follow the same command format as that of a standard probe (Mnnn /Axis pos P pF f L1) with the following exceptions:f This will be ignored if “Force DSP Feedrate in M115/M116” has been set to yes.L1 Still prevents a fault from occurring. Stores last DSP position on failed window.L2 Like L1, prevents a fault from occurring but instead stores last mechanical pos. on failed window.Q1 On a failed window, force a pull back distance equal to the Probing Recovery Distance(Parameter 13), instead of moving back to the starting point.DSP position vs. mechanical position:Protected probing moves that are performed using a standard DP4 probe can collect only the point at which motion has stopped after detecting contact. This position is referred to as the “mechanical position”. When using the DSP type probe, it detects and stores the contact position “on the fly”. This position is in machine position (not a local WCS position) and is referred to as the DSP position.Example from above – Modified to use a DSP type probe:Finding the center of a vertical slot.M115/X P-15 ; Move X minus at DSP rate until probe trip (no feedrate needed)#100 =[[#24301]-[#2500]] ; Convert point to current WCS position, Store point in variable #100M116/X P15 ; Move X minus at 5 ipm until probe clearsM116/X P-15 ; Move X plus at DSP rate until probe tripX[[#100+[[#24301]-[#2500]]]/2] ; Move X to center of slotRetrieving the DSP position:The last stored DSP position for axes 1-5 can be retrieved from system variables #24301-#24305 unless theL2 switch was used in which case #24301-#24305 will contain the mechanical position after a failed window.M120 - Open data file (overwrite existing file)This M function will open the requested data file for writing. If no drive or directory is specified with the file name, then the file will be opened in the same directory as the CNC program. If the file cannot be successfully opened, then an error will be returned, ultimately terminating the job. If a data file is already open when M120 is called, that file will first be closed, then the new file opened.Example:M120 "probetst.dat" ; Opens probetst.dat file to write data tooNote: M120 and M121 also allow use of the string user variables #300 - #399 to specify a filename. As anexample, given that #300 = “myfile” and #301 = “cnc”M120 “#300.#301” ;Opens the file “c” for data recording.Keep in mind however that there is a quirk in the way that the M120/M121 operates that requires the '.' to be present so assigning #301 = “.cnc” and executing M120 “#300#301” does not work and generates a “Could not open file” error message.M121 - Open data file (append to existing file)This M function will open the requested file for writing at the end of the file. If no drive or directory is specified with the file name, then the file will be opened in the same directory as the CNC program. If the file does not already exist, it will be created. This is not an error. If the file cannot be successfully opened, then an error will be returned, ultimately terminating the job. If a data file is already open when M121 is called, that file will first be closed, then the new file opened.Example:M121 "c:\probetst.dat" ; Opens probetst.dat file to add data to itString variables #300-#399 may also be used to specify a file name. Please see M120 above for details.M122 - Record local position(s) and optional comment in data file This M function will write the current expected position value to the data file, in the usual format (i.e. axis label before number, 4 decimal places in inch mode, 3 decimal places in millimeter mode. Any comment that appeared on the line with M122 will be outputted after the position(s). With no axis arguments, M122 will write thepositions of all installed axes. With axis arguments, it will write the positions only of the requested axes. Positions will be written in local (not machine) coordinates, in native machine units. If no data file has been opened with M120 or M121 before M122 is called, then M122 will return an error and terminate the job. The parameter L1 may be used to suppress the new line character normally outputted after the last position. Furthermore, the output of axis labels, comma separators, and spaces can be enabled or suppressed via machine parameter 72 (see Parameter 72 in Chapter 14). If the control has been configured to use a DSP probe type, using parameter Q1 will write the values stored in #24301-#24305 to the file.Examples (M function and sample output):M122 ;comment -> X1.2345 Y-3.2109 Z-0.5678 ;commentM122 /X L1 -> X-1.5000M122 /X -> X-1.5000 X-2.0000M123 - Record value and/or comment in data fileThis M function will write the specified parameter value (if any) to the data file, followed by any comment that appeared on the line with M123. If a P value is specified, M123 will record the numeric value (4 decimal places in inches, 3 in millimeters). If neither a P value nor a comment was specified, M123 does nothing. This is not an error. If no data file has been opened with M120 or M121 before M123 is called, then M123 will return an error and terminate the job. The parameter L1 may be used to suppress the new line character normally outputted after the last value. The R and Q parameters can be used to specify the field width and precision, respectively.Furthermore, the output of axis labels, comma separators, and spaces can be enabled or suppressed via machine parameter 72 (see Parameter 72 in Chapter 14).Examples (M function and sample output):M123 ;1.2345 ->1.2345M123 P#A ; first macro argument ->1.2345 first macro argumentM123 Q0 P1.23 ->1M124 - Record machine position(s) and optional comment in data file Identical to M122 above except that the m124 reports machine position instead of a local WCS position.M127 - Record Date and Time in a data fileThis M function is used to write the date, time, and year to the specified data file called out by the M120 or M121.Examples (M function and sample output):M121 “testdata.dat”M127If you opened testdata.dat you would see: Day of week, Month, day, time, and year.(i.e. Wed Aug 29 11:56:57 2007)M128 – Move Axis by Encoder CountsM128 moves the requested axis by L which specifies an encoder count position or quantity. The L parameter is subject to the current G90/G91 mode (absolute/incremental).Example:G91 M128/X L-5000 ; move the X axis incrementally by -5000 countsM129 - Record Current Job file path to data fileThis M function is used to write the current job’s file path to the specified data file called out by the M120 or M121.Example:Run a job named c which contains the following 2 lines:M121 “output.txt”M129If you opened the output.txt file you would see:c:\cncm\ncfiles\c。
Canon PS 打印机驱动程序可以在下列系统环境中使用

Canon PS 打印机驱动程序可以在下列系统环境中使用:* 操作系统软件Microsoft Windows 2000Microsoft Windows XPMicrosoft Windows Server 2003Microsoft Windows VistaMicrosoft Windows Server 2008Microsoft Windows 7* 计算机任何正确运行上述操作系统软件的计算机。
但是,至少需要下列输出端口之一:- 并行打印机端口(LPT1、LPT2 等)- USB 端口- 网络接口为获得最高质量的打印输出效果,推荐使用网络接口。
安装打印机驱动程序=============================要在Microsoft Windows 2000/XP/Server 2003/Vista/Server 2008/7软件应用程序中使用该打印机驱动程序,请使用下列安装过程。
注意建议使用安装程序升级或添加打印机驱动程序。
如果使用“添加打印机向导”安装新的打印机驱动程序,必须通过单击“打印机属性”对话框中的“新驱动程序”按钮升级所有现有打印机驱动程序。
* 如果您使用 SMB(NetBIOS 网络)打印机作为服务器计算机上的共享打印机,请使用“添加打印机向导”,并在安装打印机驱动程序时选择“网络打印机”。
* 如果以“标准用户”身份登录到 Windows 2000/XP/Server 2003 并运行安装程序,那么安装可能无法正确完成。
在这种情况下,请以“管理员”身份登录,然后重试安装。
* 如果使用安装程序时显示消息提示您重新启动计算机,请确保重新启动计算机。
如果不重新启动计算机,现有驱动程序可能无法正常运作。
* 如果已经为 Windows 2000/XP/Server 2003 安装了下列Canon 驱动程序,那么安装后必须重新启动计算机。
- PS v1.00 打印机驱动程序- PCL5e v4.70 或更早版本的打印机驱动程序- PCL6 v2.40 或更早版本的打印机驱动程序- Fax v1.40 或更早版本的驱动程序* 如果您在 Windows 2000/XP/Server 2003 中使用 Canon PS 打印机驱动程序 V1.00,首先将驱动程序更新为V1.2x 或V1.3x,然后安装V2.21 打印机驱动程序。
MEG Ai1300P PCIE5 MEG Ai1000P PCIE5 电源供应器使用手冊说明书

MEG Ai1300P PCIE5 MEG Ai1000P PCIE5 Power Supply UnitUser Guide전원 공급 장치 사용 설명서電源供應器使用手冊PC電源使用手册Блок питания Руководство пользователя12VHPWR (PCIe 5.0 16 Pin) Cable Installation 12VHPWR (PCIe 5.0 16 Pin) 線材安裝Please fully insert the cable before use.Specifications/ 사양/ 規格/ 规格/* Please refer to “Software Control and Monitoring” section to download and install MSI Center to activate 12V multi-rail output.* MSI Center를 다운로드 및 설치하여 12V 멀티 레일 출력을 활성화하려면 “소프트웨어 제어 및 모니터링” 섹션을참조하십시오.* 請參考 「軟體控制及監測」 章節,下載並安裝 MSI Center,以啟動12V 多路輸出。
* 请参阅 「软件控制和监控」 部分下载并安装 MSI Center 以激活 12V 多路输出。
* Пожалуйста, обратитесь к разделу «Программное управление и мониторинг», чтобы загрузить и установить MSI Center для активации режима Multi-rail (12В).Dimensions/ 치수/ 外型尺寸/ Размеры150 mm160m m86m mNumber of Power Connectors/ 전원 커넥터 수량/電源接頭數量/ 电源接头数量/Detachable Connectors/ 분리 가능한 커넥터/ 可拆卸接頭/ 可拆卸接头/ Кабельные интерфейсыPCI-E CPU ATX 24PSATA & MOLEXPCI-E+12VHPWR*G.I.*G.I. : Please refer to “G.I. Port ” section for more information.*G.I. : 자세한 내용은 “G.I. 포트” 섹션을 참조하십시오.*G.I. : 請參考 「G.I. 連接埠」章節以獲取更多資訊。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E500 series MP 驱动程序v. 1.00 (Windows 7/7 x64/Vista/Vista64/XP)
最近更新: 22-Sep-2011
发行编号: 010*******
操作系统
∙Windows 7
∙Windows 7 (x64)
∙Windows Vista
∙Windows Vista (x64)
∙Windows XP
要点
本产品为用于Canon IJ 多功能打印机的驱动程序。
更新历史记录
系统要求
Windows 7(32bit)
Windows 7(64bit)
Windows Vista(32bit)
Windows Vista(64bit)
Windows XP SP2 或更新的版本
安装说明
下载/安装步骤
1. 单击链接,选择[ 保存],指定" 另存为",然后单击[ 保存] 下载文件。
备注:
如果选择[ 运行] ( 或[ 打开] ) 而不是[ 保存],文件被保存后会被自动安装。
2. 下载的文件以自解压形式( .exe 格式) 保存在指定的位置。
3. 双击下载的EXE 文件进行解压,然后开始自动安装。
文件信息
∙文件名: mp68-win-e500-1_00-ea24.exe
∙文件版本: 1.00
∙文件语言: 阿拉伯文, 捷克文, 德文, 丹麦文, 英文, 西班牙文, 芬兰文, 法文, 希腊文, 匈牙利文, ID, 意大利文, 日文, 韩文, 荷兰文, 挪威文, 波兰文, 葡萄牙文, 俄文, 瑞典文, 繁体中文, 泰文, 土耳其文, 简体中文
∙文件大小: 20,947KB
免责
佳能(中国)有限公司对任何载体上的,或从这里下载的,或从其他佳能公司网站上下载的任何程序(包括但不限于:驱动程序。
以下简称:软件)、文件、或其他资料,佳能(中国)有限公司不提供任何保证。
所有的软件、文件、和其他材料,都是以“既成形式”提供的,佳能公司不提供任何保证,包括明示的或暗示的,包括但不限于,商用性隐含保证,特殊目的下的适用性和无损害性。
佳能(中国)有限公司对这里包含的错误,或引起的利润的损失,机会的丧失,或由于使用本软件,包括本网站下载的其他软件,而造成的直接或间接的损失,佳能(中国)有限公司不承担责任。
未获得中国政府或者相应国家政府的必要许可、授权等的,不得以直接或者间接方式出口本软件的全部或者部分。
产品规格及外观等如有变化,恕不另行通知。
我已经阅读过和完全明白以上所提到的内容,并愿意下载已选定的程序或驱动。