一种新型电机-关节位置传感器的研究
一种新型永磁同步电机高阶滑模转速观测器的研究
一种新型永磁同步电机高阶滑模转速观测器的研究纪科辉;周勇;鲁文其【摘要】针对面贴式永磁同步电机无位置传感器速度控制系统存在的速度检测延迟、检测误差较大、动态响应不够快等问题,对永磁同步电机无位置传感器速度控制系统模型和传统滑模速度观测器结构和原理进行了分析,对高阶滑模算法理论进行了推导,结合永磁同步电机数学模型,提出了一种以位置信号为滑模变量,以高阶滑模变结构算法为基础的新型滑模转速观测器,利用Simulink软件构建了基于新型滑模速度观测器永磁同步电机矢量控制系统,对电机的起动特性、速度跟踪特性、抗外界干扰性能进行了研究.研究结果表明,由于新的滑模观测器将转子位置与反电势信号的关系进行了分离,消除了反电势信号处理滤波器对速度估算的延迟,提高了速度检测精度,从而改善了系统的稳态和动态性能.【期刊名称】《机电工程》【年(卷),期】2016(033)009【总页数】5页(P1135-1139)【关键词】高阶滑模;永磁同步电机;无位置传感器控制;转速观测器【作者】纪科辉;周勇;鲁文其【作者单位】浙江理工大学机械与自动控制学院,浙江杭州310018;浙江华丰电动工具有限公司,浙江金华321037;宁波罗杰克智能科技有限公司,浙江宁波315000;浙江理工大学机械与自动控制学院,浙江杭州310018【正文语种】中文【中图分类】TM351永磁同步电机是一个多变量、强耦合的非线性系统,存在参数时变、负载扰动等不确定因素,对控制系统的要求很高,其控制性能的好坏取决于系统对未知状态量的估测精度和动态响应速度,因此研究如何快速而又准确地获取转速和转角信息是研究PMSM无位置传感器控制系统的关键所在。
滑模观测器源于滑模变结构控制方法,具有类似于滑模变结构算法的特点,因而对于系统的不确定性和外部干扰具有较强的鲁棒性和抗扰性[1-2]。
研究表明通过准确设计滑模参数,滑模观测器能够较精确地估计系统参数[3-7]。
目前,在基于滑模算法的电动机无位置传感器转速控制研究方向上,已经有了一定的研究成果。
【doc】仿人灵巧手关节的位置/力矩控制
仿人灵巧手关节的位置/力矩控制第7卷第2期2003年6月电机与控制ELECTRICMACHINESANDCONTROLVO1.7No.2June,2003仿人灵巧手关节的位置/力矩控制姜力,刘宏,蔡鹤皋(哈尔滨工业大学机器人研究所,黑龙江哈尔滨15(1001)摘要:为了使仿人灵巧手完成各种精细作业,提出了一种新的关节位置/力矩控制方法.在自由空间和约束空间中分别采用滑模位置控制和具有前馈的PD力矩控制,在过渡过程中使用系统观测器切换控制模式.这种方法可以使关节在自由空间和约束空间中分别实现良好的轨迹跟踪和力矩跟踪,在过渡过程中实现控制模式的可靠切换和系统的稳定过渡.实验证明了该方法的有效性.关键词:位置控制;力矩控制;滑模控制;灵巧手中圈分类号:1?244文献标识码:A文章编号:1007-449X(2003)02—0151—06 Position/torquecontrolforjointofhumanoiddextroushandJIANGLi,LIUHong,CAIHe—gao(HarbinInstituteofTechnology,RobotResearchInstitute,Harbin150001,China) Abstract:Inthispaper,anewjointposition/torquecontrolstrategyisproposedinorderto completevariousfinemanipulationsbyusingdextroushand.Slidingmodepositioncontrol andPDtorquecontrolwithfeedforwardareusedinfreeandconstrainedspace,respectively. Systemobserverisadoptedintransitioninordertoswitchcontrolmode.Trajectorytrackinginfreespaceandtorquetrackinginconstrainedspacearerealized,andreliabilityofmode switchandstabilityofsystemareachievedintransition.Experimentalresultsverifiesthe effectivenessofthismethod.Keywords:positioncontrol;torquecontrol;slidingmodecontrol;dextrousrobothand1引言作为机器人与环境相互作用的最后环节和执行部件,末端执行器对于机器人智能化水平和作业水平的提高具有重要的意义,多自由度多关节的仿人机器人灵巧手成为新一代智能机器人研究的重点领域,世界上有很多着名的灵巧手问世,如2O世纪8O年代美国的Utah/M1T手和Stanford/WE手,9o年代德国的DLR手和美国的NASA-JsC手等_...为了使灵巧手可靠而稳定地抓握物体并且进行灵巧操作,灵巧手具有一定的柔顺性,即对外界环境具有顺应能力.目前,阻抗控制是主动柔顺控制的一种主要方法,其优点是把力控制和位置控制纳入统一的框架中,设计简单,任务规划量小,但是难于实现精确的力跟踪.为了解决阻抗控制的力跟踪问题,学者们提出了包括自适应控制在内的许多方法【6~,但是算法复杂,执行时间较长,应用效果并不理想.为此,本文以Hrr仿人灵巧手关节为对象,研究了一种新的位置/力矩控制方法,目标是:关节在自由空间中精确地跟踪期望轨迹,在约束空间中稳定地与环境接触并且跟踪期望力矩,能够实现自由空间到约束空间和约束空间到自由运动的稳定过渡.收稿日期:2002--09-01基金项目:圈零863计划(863—512—9924-03)和黑龙江省杰出青年科学基金资助项目.作者简介:姜力(1970-),男,博士后,研究方向为机器人及灵巧手的传感,驱动和控制: 刘宏(1966一),男,.长江学者奖励计划特聘教授,博士生导师,研究方向为仿人机嚣人灵巧手,机嚣人宏/截操作嚣;蔡捣奉(1934一),男.中啊工翟院院士,研究方向为机电一体化技术,机器人学.152电机与控制第7卷本文首先简要介绍HIT灵巧手并建立关节的传递函数和状态空间数学模型,然后分位置控制,力矩控制和系统观测器三部分研究关节的位置/力矩控制方法,最后通过实验验证该控制策略的有效性.2肼手关节的数学模型具有多种感知功能的仿人灵巧手一HIT手由4个完全相同的手指组成,大拇指与其他3个手指相对放置,每个手指有4个关节,末端的两个关节存在着机械耦合.HIT手采用微型直线驱动器和腱相结合的方式进行手指的驱动,l2个直线驱动器均放置在手掌中,从而实现了驱动系统和机械本体的集成,减小了灵巧手的体积,改善了系统的性能.HIT手具有关节力矩,指尖力,力矩,温度和位置等96个传感器,共600多个机械零件,1600多个表面贴装电子元件,是一个集机构设计,微型传感器,驱动及智能控制为一体的高度集成化机电系统,如图l所示.末端的两个关节通过腱一滑轮一弹簧机构实现运动的耦合,传动比是l:l.在手指中有关节力矩传感器用来检测关节所受的力矩;在手指的末端放置微型的五维力,力矩传感器,用来检测手指尖和被抓握物体的接触力和力矩,为柔顺控制提供力感信息.关节的驱动系统包括微型直线驱动器和腱传动两部分,微型直线驱动器是驱动系统的核心.该驱动器将微型无刷直流电机(BLDCM,BrushlessDCMo. tor),旋转一直线转换机构和减速机构融为一体,具有直线位置检测,电机位置检澍和光电式极限位置检测等多种感知功能,是一种光机电一体化的集成式微型直线驱动器,又称.人工肌肉(ti6cMus. de).根据BUX=M的动力学特性,关节的动力学特性如方程(1)~(5)所示.其参数的含义为:R为电枢电阻;,I为减速比;L为电枢电感;wM为PWM常数;KT为力矩常数;为电枢电压;K为反电动势系数;f为电枢电流;J为转动惯量;为电磁转矩;B为阻尼系数;T为接触力矩;为电机位置;为重力矩;0为关节位置;为摩擦力矩.电压平衡方程为u.=Ri+L軎+P(1)反电动势P=Ke百dOm(2)电磁转矩=K4(3)转矩方程图1FlIT手.1TheFlIThandHIT手的手指结构如图2所示.图2中,利用弹减速比簧,套管和腱传动由直线驱动器对中指节进行驱动, 图2HIT手的手指结构№2喀盯structure0ftheHIThand睾=.,dr"+Bdt+++丁,I'',1—使用PWM方式调节从而实现关节的位置控制,忽略驱动电路的延时,其传递函数为GPWM(s)=—≈七PwM(6)根据上述方程,单关节的传递函数为㈣=器=(,IKPwMKT)u.(一,I(Ls+R)(Tgs)-k(s)+7)),',(n'JL)s+n2(JR+BL)s+(n2BR+KKT)s设(f)=和D(t)=卯分别为关节的期望轨迹向量和实际轨迹向量,其中,,Od第2期仿人灵巧手关节的位置,力矩控制153分别为关节的期望位置,速度和加速度;0,百,分别为关节的实际位置,速度和加速度.定义误差向量为r)=(r)一D(r)=【e.e2P3】(8)[妻]=[三1.三][圣]一[呈]+[呈.]c+++0]Ud=d30d+(号+)+n2BR+KeKrdOd.,l儿dt'一百n2BR+K,Kr._一(争+):^?一一———_—一'^:一\丁._/' 等;A4-R.3关节的位置,力矩控制本文提出的关节位置/力矩控制策略的原理是:当关节在自由空间中运动时,采用滑模位置控制使关节跟踪期望轨迹:当关节在约束空间中运动时,采用前馈的PD力矩控制使手指与环境稳定接触并且跟踪期望力矩:当关节从自由运动向接触运动过渡或从接触运动向自由运动过渡时,采用系统观测器完成控制模式的切换和系统的稳定过渡.3.1关节位置控制系统的设计关节位置控制系统包括滑模位置控制器和轨迹插补两部分.3.1.1关节的滑模位置控制l9l滑模位置控制器的设计由两部分组成:选择切换函数,使系统的滑动模态渐近稳定并且具有期望的动态品质:求解控制函数uc(e),使滑模的存在条件和到达条件得以满足.1)切换函数s(层)的选择采用线性切换函数=D(9)式中:C=【clc2】;z(t)=【ele2P3】.取=l,不失一般性.滑模运动方程为+c2+ctel=0(10)特征方程为p+c2P+cl0(11)为了使系统渐近稳定,则c.>0,c2>0:为了使系统无超调,则c~>/4cI.2)控制函数")的选择所采用的控制函数为"clel+2e2+6sgn(s)(12)式中:.和分别是el和的反馈增益;为一个小的正数,它可以保证原点处(el===0)满足滑模的存在条件,同时提高系统的抗干扰能力,消除静态误差.根据广义滑模条件可以得到s=(cl+c2+亩=(一clc2一ctA2一A31)s+(cl+A2一一c22一A32)P2s+(c2+A2)s+【A4(丁++rf)+Is—A36sgn(s)s<0于是.f1,ets>0l.<0.f2.e2s>02{,<o~2<--号+叶l这里,x(一)≤n(一),x(),n()?由于采用PWM方式驱动关节,所以在控制系统中引入饱和函数(如图3所示),即f",luI≤lU=sat(u)={1,">1(13)【一1,"<一13.1.2关节的轨迹插补为了使灵巧手关节平滑地运动,在位置控制系统中对路径上给定的参考位置点r进行轨迹插补,使轨迹上所有点的位置,速度和加速度连续.本文采用带有过渡域的插补算法,原理如图4所示m1.在过渡域中采用4次多项式描述关节的位置,0,d和0的表达式为[(△c鲁+△B)c2h~-2AB]h+B+ABc?4=[(△c鲁+△B(1.5-h)2△-1亡(15)l54电机与控制第7卷图3关节的位置,力矩控髑系统Fig.3Position/torquecontrolsystemofthejoint:AC导+AB)(1一Ih)下3h(16)大时,有利于增强系统的稳定性和减小力超调?为了.\』t/r克服力矩传感器输出信号的噪声对于控制系统性能式(14)~(16)和图4中,C和D是运动路径上的的影响,在反馈环中以关节速度代替力矩的直接微关节参考位置;是加速时间,在k内关节可以从分.当AT=0时,前馈项提供的偏置力矩可以减静止加速到最大速度;和分别是轨迹段BC和CD小系统的稳态误差并且提高系统的抗干扰能力.的时间;AC=C-=A-B,h=速运鐾或脱离接需要利用系动段,:ACh,+:AC,:o'其中,Ih,,/T,.统观测器进行控制模式的切换?有关变量的说明如图4关节的轨迹插补原理Fig.4Principleoftrajectoryinterpolation3.2关节力矩控制系统的设计关节力矩控制的目标是:使关节成为一个独立于位置的纯力矩源,能够根据作业要求输出期望的力矩.PID控制以其算法的有效性和简易性在机器人力控制领域占据着主导地位.本文采用PD控制和前馈补偿相结合的方法设计关节力矩控制系统.控制函数"的表达式为,|日".△丁一KD++(17)式中:和丁分别为关节的期望力矩和实际力矩,AT=—T表示关节力矩误差;0为关节的实际位置;KP和KD分别为力矩控制器的比例系数和微分系数;".为控制器的输出;为关节所受的重力矩. 在控制算法中,引入速度反馈项是为了增加系统的阻尼,改善力控制系统的性能,特别是当阻尼增1)任务变量Task:GRAsP表示抓握,REI恩ASE表示放开.2)系统状态变量State:FREE表示关节处于自由空间,CoNrACT表示处于约束空间.3)控制模式变量Mode:POS_CTRL和FORCE—CTRL分别表示位置控制和力矩控制.4)力矩阈值变量TI.系统观测算法如图5所示.变量初始化:State=FREEmode--POS—CTRL令NNYlYIState=FREEState=CoNTACTState.o0NTACT mode=POS—CTRLmode=POS..CTRL.mode暑F0RCE—CTRL1'LI位置薯嗣器lL二二二图5系统观测器的算法Fig.5AlgorithmofS~qlttObs圈—er3.4关节保护系统3.4.1位置保护在运动和抓取过程中,为了使关节不超过自身的运动范围,进行位置保护是十分必要的.在埘T灵第2期仿人灵巧手关节的位置/力矩控制155巧手中,采用硬件和软件两种方式实现关节的位置保护.在微直线驱动器中使用电位计检测其直线位置,使用光电开关检测其极限位置.当驱动器到达设定的极限位置时,将产生极限位置信号.逻辑电路输出的刹车命令使驱动器停止运动,从而实现关节的硬件保护.在控制算法软件中首先判断关节的参考位置or和实际位置0是否在设定的关节运动范围之内,同时结合驱动器的运动方向,确定是否输出刹车信号,从而实现关节的软件保护.3.4.2力矩保护在抓握和操作物体时,为了避免手指与物体的接触力过大或手指之间相互碰撞而损坏灵巧手的机械件,传感器和驱动器,在进行位置保护的同时必须采取力矩保护措施.本文根据具体的作业任务设定关节力矩的允许范围,在保护系统中判断关节力矩是否在该范围之内,同时结合驱动器的运动状态确定是否输出"刹车信号,从而实现手指的力矩保护.4实验4.1控制系统硬件本文基于DSl103控制板建立HIT手的关节位置/力矩控制系统.DSl103板上的主处理器是摩托罗拉公司的PowerPC604e,辅处理器是德州仪器公司生产的数字信号处理器TMS32OF24o.该控制板还提供了A/O,D/A,I/O,PWM,RS232和RS422等多种功能模块.本文应用DSl103板上的l6位A,D转换模块采集电位计式直线位置传感器和两路霍尔传感器的输出信号,利用PWM模块输出电机的PWM驱动信号,利用BITI/O模块向驱动电路输出方向信号和刹车信号.本文采用直线电位计信号计算关节的角度,采用霍尔传感器信号计算关节的速度和加速度,利用关节力矩传感器感知手指在约束空间所受到的力矩.4.2控制实验4.2.1位置控制对关节的动力学模型参数进行测量和最dx--乘估计,结果为:R=5.7Q,L=0.44mH,KT=7.4×10(N?m)/A,K.=7.5×10一V/(rad?S一'),-,=7.7×lOkg?m2,B=5.2×10(N?m)/(rad?S),,I=1/2l8,KPwM=22.根据关节参数和3.1.1节给出的滑模控制参数计算公式,通过仿真和实验反复调整,最后确定滑模控制器的参数为cl9000,200,c3l;=0.03,rel=l3,卢l=8,re2=2,卢2=一2.由于控制量的有限性,机械系统的惯性和电气系统的延时等原因,抖振是实际滑模系统中必然存在的现象.本文采用符号函数连续化的方法抑制抖振.在式(12)的控制函数中,开关控制量"可以表述为"r-6sgn(s)=寺(18)lal将式(18)稍加修改,使之变为"赤(19)式中:△表示边界层的厚度,是很小的正常数.式(19) 将符号函数变为的光滑连续非线性函数,系统成为一种具有准滑动模态的变结构控制系统.在滑模超平面s=0的△邻域内,系统具有很高的增益,这对于.抖振的抑制是有利的.因为系统的状态稍偏离切换面时,会产生很大的控制力将其拉回到切换面上.但是如果系统的状态测量存在较大的误差,则切换函数在s=0附近的符号可能有误,由此造成控制量符号的错误,此时大的控制力反而会引起更强的抖振.较大的△有利于削弱抖振,但会严重地降低滑模系统固有的不变性,同时影响系统的稳态精度.许多学者研究了边界层厚度的选取原则,并且提出了在线调整△以适应系统动力学不确定性的各种自适应控制算法.本文通过实验的方法对△进行调整,原则是:在系统不发生明显抖振的前提下,最大限度地保持系统的鲁棒性,因为这是滑模系统的优势所在.关节滑模位置控制系统的阶跃响应如图6所示.图6中,x是驱动关节的直线驱动器的位置.实验中,期望位置是2.5turn,驱动器经过50Ills左右到达期望位置,响应速度快,并且无超调,无振荡,这对于机器人及其灵巧手的抓握和操作是非常重要的.:============0,Ol0ot/ms图6关节位置控嗣系统的阶跃响应曲线Fig.6Stepresponseofjointpoat~eotaroll56电机与控制第7卷结合3.1.2节的轨迹插补算法,在自由空间中进行轨迹跟踪实验,结果如图7所示.由图7可以看出, 驱动器很好地跟踪了期望轨迹.g3'052OO一≥0.O5O.1O0.150.2Dn25t圈7关节位置控镧系统的轨迹跟踪曲线Fig.7Ihject0ryIcl【ingofjmtpositioncontrol4.2.2力矩控制实验图8是抓握过程中关节从自由空间到约束空间的力矩曲线.根据具体的操作任务和关节力矩传感器信号的噪声,选定力矩阈值为----7.5N?mm.当关节力矩达到瓦以后,设定期望力矩为:15N?衄一20N?衄一25N?衄一20N?mm-*15N?ram;阶跃变化的时间间隔是0.5s.结果显示,关节力矩控制系统可以实现快速而准确的力矩跟踪,切换算法可以保证控制模式的可靠切换和过渡过程的稳定.,-,g●t,s圈8抓握过程的关节力矩.8Jointtorqueresponseingraspingphase5结论为了使仿人灵巧手能够可靠而精确地抓握物体并进行精细作业,本文提出了一种新的关节位l/力矩控制方法:在自由空间和约束空间中分别采用滑模位置控制和具有前馈的PD力矩控制,在过渡过程中使用系统观测器进行控制模式的切换.这种方法可以使关节在自由空间和约束空间中分别实现良好的轨迹跟踪和力矩跟踪,在过渡过程中实现控制模式的可靠切换和系统的稳定过渡.以瑚rr灵巧手关节为对象进行的实验证明了该方法的有效性.{_|考文献:Il】JAo0BSENSC,WOODJE,KNU,rTIDF,eta1.TheUTAH/MITdextroushand:workinpmgreu【J】.TheInter? nationalJournalofRoboticsResearch.1984,3(4):21-50.【2】2SALISBURYJK,CRAIGJJ.Articulatedhands:fclroecon? tmlandkinematicissues【J】.InternationalJournalofRob? oticsResearch.1982,l(1):4—17.【3】BUTTERFASSJ,HIRZINGERG,KN0CHS,eta1.DLR'Smultisensoryarticulatedhand.partI:hard?andsoftwarearchitecture[A】.ProceedingsoftheIEEEInterna? tionalConferenceonRoboticsandAutomation[C].Leuven, nelgium,1998.2081—2086.【4】LIUH,BUTTERFASSJ,KNoCHS,cta1.Anewcontrol strategyforDLR'Smultisensoryarticulatedhand【J】.IEEE ControlSystems.1999,19(2):47—54.【5】LOVCHIKCS,DIFLERMA.TheRobonautHand:A dextrousrobotichandforspaceIA1.ProceedingsoftheIEEE InternationalConferenceonRobotics彻dAutomation.Detroit【q.Michigan,1999.907—912.【6】H0MAY0UNS.NonlinearandAdaptiveControlofForce andComplianceinManipulaton【J】.TheInternationalJour? nalofRoboticsResearch,l998,l7(5):467—484.用HOMAYOUNS,RICHARDC.Forcetrackinginimpedance control【J】.TheInternationalJournalofRoboticsResearch, 1997.16(1):97一ll7.【8】8SEULJ,HSIATC.Adaptiveforcetrackingimpedance controlofrobotforcuttingnonhomoganeousworkpiece[A】. ProceedingsoftheIEEEInternationalConferenceonRobo? ticsandAutomation[C].Detroit,Michigan.l99I9.1800一l805.【9】姜力.蔡鹤皋.刘宏.基于滑模位置控制的机器人灵巧手模糊自适应阻抗控制【J】.控制与决策,2001,l6(5):612—616.【lq理查德.P.保罗着.机器人操作手:数学,编程和控锚【M1.郑时雄,谢存禧译.北京:机械工业出版社.1991.13o—l(编辑:徐兴华)。
设计机械臂实验报告

设计机械臂实验报告引言机械臂是一种能够模拟人类手臂动作的机器设备。
它由一系列的关节、驱动器和传感器组成,可以执行各种需要高度精确和大力度的工作任务。
机械臂在工业生产、医疗手术、军事领域等具有广泛的应用前景。
本实验旨在设计一个基于Arduino控制板的机械臂,并在实际操作中验证其运动控制和抓取能力。
设计与材料我们设计的机械臂由四个关节组成,分别是基座、肩部、肘部和手部。
每个关节都使用了舵机和位置传感器,以实现位置控制和反馈。
整体结构材料采用了铝合金,轻量且坚固。
Arduino控制板用于接收指令并控制舵机的运动。
实验中的关键材料与器件如下所示:- Arduino控制板- 4个舵机- 4个位置传感器- 铝合金框架- 连接器和螺栓- 电源和电线实验步骤1. 设计机械臂结构根据我们对机械臂运动和功能的需求,我们设计了一个合适的机械臂结构。
基座固定在平面上,肩部和肘部通过舵机连接,并能够绕各自的轴旋转。
手部可以通过舵机打开和关闭,以模拟抓取动作。
2. 搭建机械臂按照设计图纸,将铝合金框架连接起来,同时将舵机和位置传感器安装在各个关节上。
确保关节可以自由运动,并且传感器能够准确测量位置。
3. 编写控制程序利用Arduino开发环境,编写控制程序。
程序中包括了舵机运动控制的算法,以及位置传感器的读取与反馈。
我们使用了PID控制算法,通过对位置误差的调整,使得舵机能够准确地到达指定的位置。
4. 测试运动控制将机械臂连接到电源和Arduino控制板,上传编写好的程序。
通过输入指令,控制机械臂的运动。
观察机械臂是否按照预定的轨迹运动,并且关节的位置是否准确。
5. 测试抓取能力在设计的机械臂手部上,放置不同大小和形状的物体。
通过控制舵机的运动,模拟机械臂的抓取行为。
测试机械臂是否能够稳定地抓取物体,并将其移动到指定位置。
实验结果经过一系列测试,我们的机械臂成功地实现了运动控制和抓取的功能。
机械臂能够按照设定的轨迹准确运动,并且关节的位置控制非常精确。
EPS用永磁同步电动机转子位置传感器的一种新型设计
体积 和重量 的前 提下 , 依靠 电机本体 , 仅仅 无法满 足
在如此大 转速范 围 内提 供相 应扭 矩 要 求 , 只有 通 过
控 制器 弱磁 控制 来满 足 电机 在 l 5 / i 后 的 0rmn之 0
性 能需要 。
6
冒
善 i
】
O
55 0
1 0 0 1" 0 2 B 5 / o0 5
pi和捷太格特(t t等的 E S产品中, h) J k) e P 永磁 同步 电 动机得到 了广泛 应 用 , 多采用 表 面磁铁 式结 构 。 且 虽然工业控制技术对于无位置传感器永磁同步 电动 机没有 太多 的技 术 障碍 , 同时 有 学者 对 无 位 置 传感器 应用 于 E S 行 了研究 和 报道 』 P进 。但 是 为
不 适宜 应用 于 E S电机进 行位 置检测 。 P
; ;
j
从早 期 的直 流有 刷结 构 向无 刷结 构转 变 。 目前 广泛
使用 的有异 步 电机 、 刷直 流 电机 和 永磁 同步 电动 无
机 。永磁 同步 电动机 由于具 有效 率高 、 功率 密度 大 、 体积 小 、 制 性 能 好 等诸 多 优 势 , E S系 统 中得 控 在 P
2. . s a c n tt t d r Elc r n c e hn l g o p Cop r to S a g a 0 2 N0 21 Re e r h I siu e Un e e to is T c oo y Gr u r o ain, h n h i2 0 33, n Chi a;
然 不同型式 的 E S对 电机 的功率 要求 不 同 , 是 曲 P 但
线形 状 和趋 势是 相 同 的 。由 图 1可 见 , P E S电机具 有 以下特点 : 1 电机 工作 转速 范 围宽 , 0— 0 () 从 28 0 rm n ( ) / i ;2 电机在 较宽 的 转速 范 围 内要求 保 持 接近 恒力 矩输 出 ( 0~10 0 rri) 且转矩 较 大 , 1 如 5 / n , a 图 的扭 矩在 10 0rm n时达到 5 2 N ・ 5 i / . m。( ) 3 电机
外骨骼助行器的设计与控制技术研究
外骨骼助行器的设计与控制技术研究随着人口老龄化的加速,需要助步器和手杖等辅助器具的人数也在逐年增加,这也让外骨骼助行器成为了另一个备受关注的市场。
外骨骼助行器是一种通过机械、传感器等技术实现的特殊辅助器具,它可以帮助步履不便的人重新获取行动能力。
在外骨骼助行器的设计和控制技术上,已经得到了很大的进展。
一、外骨骼助行器的组成外骨骼助行器的基本构造一般包括腿部外壳、电机、控制系统等。
其实整个系统的基本组成和常见的电动轮椅等辅助器具非常类似,只是在外观和运作上做了更细致的改进,增强了辅助的功能和可用性。
像许多其他机器人一样,外骨骼也可以分为传统的关节执行机和电机辅助机。
其中,关节执行机是由电机和位置传感器组成的联动系统,通过在关节处安装电机,传达控制信号,将外骨骼调整到所需的位置和角度。
而电机辅助机则是一种将电机与传感器配对使用的外骨骼。
在这种外骨骼中,电机控制外骨骼在一定的速度和力度下与人体运动进行协调,以帮助人体进行正常的日常活动。
二、外骨骼助行器的控制技术外骨骼的控制技术是整个助行器系统中非常重要的一项,只有在控制技术方面得到足够的进展,才能完善整个外骨骼的技术实现,确保安全性和效率的提高。
在外骨骼的控制技术方面,有一项非常重要的新技术的发展——神经反馈控制技术。
该技术利用人体的自我调节能力,通过对神经元和肌肉的反馈控制来实现更为精细化、灵活性更高的控制效果。
这种技术的应用可以使外骨骼的控制更加自然,更加符合人体的自然走路方式。
此外,在控制技术上,应用手势识别技术可以进一步帮助实现更加精准的控制方式。
手势识别技术可以通过短距离的无线电磁波或者红外线传递手指的动作信号,从而实现对外骨骼进行精细化的控制。
三、外骨骼助行器技术的应用前景外骨骼助行器的技术现在已经比较成熟,已经可以将其应用于医疗护理、残疾人辅助和老年人辅助等多个领域。
在医疗护理方面,外骨骼的应用可以帮助一些四肢受伤的病人恢复部分运动能力,有助于增强身体的自愈能力,同时也可以减轻护理人员的负担。
人形机器人多关节的电机伺服控制系统
本月初上海国际机器人展示会,展出的几乎都是进口设备,国产的机器人演示的速度与精度远低于进口的,在上海电视台的采访中,国产厂家(机器人与伺服电机厂家)也坦言关键技术受制于人,尤其是精密伺服电机减速箱,基本都被日本公司控制,其实这跟我们的发展是在学日本人有关,伺服电机的编码器的使用都是装在了电机尾部,这种安装形式优点是增量脉冲信号对于速度贡献的精度高,动态响应好,同时输出的UVW信号提供电机换相信号,我也经常被问到有没有国产的绝对值编码器可以替换现在装在伺服电机尾部的增量编码器, 伺服电机要选用绝对值编码器,如果还是装在电机尾部,那样的编码器要求分辨率很高(为满足伺服电机的动态特性要求,最少17位以上)、信号输出响应要求快(比如EnDat等专用信号),这对于绝对值编码器国产化以及成本要求带来了很大的难度。
但是这种安装对于最终的机械输出的精度还是要取决于精密减速箱与机械传动上的精度,而这个恰恰又是日本及德国的加工强项。
如果照样学习日本的(德国的成本更贵,我们国内较少有人去学的),那就必然钻进了日本精密机械加工的圈了。
实际上装绝对值编码器与原来已经使用的增量编码器并没有对立,而一定要替换掉,其实这次展会,就算是日本的尼康公司,也提出了仅仅在伺服电机高速端装编码器不够的弊端,欧洲早有在低速端加装绝对值编码器补充信号提高精度,电机高速端用增量编码器确保电机动态特性的使用方法。
这样可以避开减速箱精密性问题,实现用绝对值编码器的确定绝对位置的重复精度,但那样机械设计与电气增加绝对值编码器信号接口就要重新考虑设计了,在国内普遍只会照样子学国外而不愿冒险创新,或者嫌麻烦不愿重新设计机械结构,这种想法恐怕也就一闪而过了。
于是,明年的展会上我们国产的厂家可能还是在抱怨精密减速箱。
仿人机器人关节的电机伺服系统摘要:本文围绕电机伺服系统在仿人机器人上的应用,简要介绍了电机伺服系统各部件的发展现状和几款适用于仿人机器人的电机伺服系统,并在此基础上分析了系统选型时须要重点考虑的因素。
一种新型无位置传感器开关磁阻电机控制方法
第4 1卷 第 2期
20 0 7年 2月
电 力 电 子 技 术
P we ecr n c o rEl to i s
V 1 1 No2 o . , . 4 Fbur,0 7 e ray 2 0
一
种新型无位置传感器开关磁阻电机控制方法
1 引 言
开关磁 阻 电机 (wt e eutneMoo, 称 S ihdR lc c t 简 c a r S M) R 引入位 置传 感器 增加 了 电机 结构 的复 杂性 。 为 此, 出现 了多种 取 消传感器 位置 测量 的方 案 , 些 方 这 案都 有 自己适用 的速 度 范围 。 在此 , 出了一种 采 的新 型控 制 方 案 。
e p r n , w—p e x e i n n i h s e d e p r n r d . h x e i n e u ti d c ts ta e s e d o x e me t l s e d e p r i o me ta d h g — p e x e me t i we e ma eT e e p r me tr s l n ia e h t p e f h t
其 结 果 表 明 , 方 案 可 以 实现 S M 整 个 速度 范 围 内 的无 位 置 控 制 。 该 R
关键词 : 开关 : 磁阻 电机 : 控制/ 数字信号处理器 中图分类号 :M3 2 T 5 文献标识码 : A 文章编号 :0 0 1o 2 o )2 0 5 — 3 10 — o x(o 7 0 — 0 4 0
在 低 速 时 由于 ∞很 小 , 因此 可 以忽 略 最 后 一
项, 即
∞, 得 到 : 而
U= ili0 i sR + (, ) d () 2
机器人关节近10年国内外研究现状综述
机器人关节近10年国内外研究现状综述1. 简介在近10年的时间里,机器人关节的研究取得了许多重要的进展。
本文将综述国内外在机器人关节领域的研究现状,包括关节驱动技术、关节控制算法、关节传感器等方面的内容。
2. 关节驱动技术2.1 电动机驱动•直流电机•步进电机•无刷电机2.2 液压驱动•液压缸•液压伺服阀2.3 气动驱动•气缸•气动伺服阀3. 关节控制算法3.1 PID控制算法1.比例控制2.积分控制3.微分控制3.2 模糊控制算法1.模糊逻辑推理2.模糊控制规则3.模糊推理引擎3.3 自适应控制算法1.自适应参数调整2.自适应控制策略3.自适应控制器设计4. 关节传感器4.1 位置传感器•光电编码器•磁编码器•位移传感器4.2 力传感器•压力传感器•扭矩传感器•加速度传感器4.3 角度传感器•陀螺仪•加速度计•磁力计5. 国内研究现状5.1 机器人关节驱动技术研究•国内研究机构•关节驱动技术的创新点5.2 机器人关节控制算法研究•PID控制算法在国内研究中的应用•模糊控制算法在国内研究中的应用•自适应控制算法在国内研究中的应用5.3 机器人关节传感器研究•国内研究机构•关节传感器技术的创新点6. 国外研究现状6.1 机器人关节驱动技术研究•国外研究机构•关节驱动技术的创新点6.2 机器人关节控制算法研究•PID控制算法在国外研究中的应用•模糊控制算法在国外研究中的应用•自适应控制算法在国外研究中的应用6.3 机器人关节传感器研究•国外研究机构•关节传感器技术的创新点7. 总结本文综述了近10年来国内外机器人关节研究的现状。
从关节驱动技术、关节控制算法和关节传感器等方面进行了全面的分析和总结。
这些研究成果为机器人关节的发展和应用提供了重要的支持和指导,也为未来的研究提出了新的挑战和方向。
希望通过本文的综述,能够进一步推动机器人关节领域的研究和发展。
水下机器人新型关节伺服系统研究

1.2 水下机器人技术综述
水下机器人 也称作潜水器
underwater vehicles ,准确地说 它不是人们
通常想象的具有人形的机器 而是一种可以在水下代替人完成某种任务的装置 水 下机器人技术是集运动学与动力学理论 机械设计与制造技术 计算机硬件与软件 技术 控制理论 电动伺服随动技术 传感器技术 人工智能理论等科学技术为一 体的综合技术 它的研究与开发标志着一个国家科学技术的发展水平,也显示出这 个国家的经济和科技发展的实力 同时其技术的应用具有重要的国防战略意义 海 洋作为人类生存和发展的新领域,海洋的开发与利用已经成为决定一个国家兴衰的 基本因素之一 世界上许多发达国家为了海洋事业,不惜投入巨大的人力 财力来 推动水下机器人技术的发展, 从而使水下机器人具有更加广阔的应用前景 水下机 器人设计是一项综合性的复杂工程,技术密集度高,是公认的高科技,它的研制水平 体现了一个国家的综合技术力量
强系统性能 引进数字位置环 速度环双环控制方案 通过对系统各个环 详细介绍以 PIC16F876 为核心的数字位置伺服控制器的硬件电路设计 并 给出软件设计流程图 4. Magnetic Compatibility-EMC 念
通过对制约水下机器人发展的能源瓶颈问题的分析 并且针对本文研究的伺服系统
最后简要总结了水下机器人伺服控制的全数字控制系统 作为实验室的预研课 题 为解决系统小型化和低功耗问题提供较好的思路 本文还提出系统中存在的一 些问题 对以后的改进和完善提出建议 水下机器人 PIC 控制仿真 电源管理 关键词
Key Words:
Autonomous Underwater Vehicle PIC Power Management
II
Simulationห้องสมุดไป่ตู้
永磁同步电机无位置传感器控制技术研究综述

永磁同步电机无位置传感器控制技术研究综述【摘要】永磁同步电机无位置传感器控制技术是近年来的研究热点之一,本文对该技术进行了综述。
在介绍了研究动机、研究目的和研究意义。
在详细阐述了永磁同步电机的基本原理、无位置传感器控制技术的发展历程、研究现状、关键技术以及应用领域。
在展望了该技术的发展前景,提出了研究的不足之处和未来研究方向。
通过本文的综述,读者可以全面了解永磁同步电机无位置传感器控制技术的最新进展和未来发展趋势。
【关键词】永磁同步电机、无位置传感器、控制技术、研究动机、研究目的、研究意义、基本原理、发展历程、研究现状、关键技术、应用领域、发展前景、不足之处、未来研究方向1. 引言1.1 研究动机无位置传感器控制技术能够实现永磁同步电机的高性能运行,减少系统成本和提高可靠性。
深入研究永磁同步电机无位置传感器控制技术,对于推动永磁同步电机技术的发展,提高系统的性能表现具有重要的意义。
在实际应用中,永磁同步电机无位置传感器控制技术的发展也将对工业自动化、电动汽车、风力发电等领域产生深远的影响。
本文旨在系统总结永磁同步电机无位置传感器控制技术的研究现状和关键技术,为这一领域的进一步研究和应用提供参考和指导。
1.2 研究目的本研究的目的在于系统地总结永磁同步电机无位置传感器控制技术的发展历程、研究现状和关键技术,探讨该技术在不同应用领域中的实际应用情况,并展望未来的发展趋势。
通过深入研究和分析,我们旨在为永磁同步电机无位置传感器控制技术的进一步发展提供参考和指导,为工业应用和科研领域提供有力支撑。
通过本研究,我们希望能够为提高永磁同步电机的控制性能和降低系统成本做出贡献,促进我国永磁同步电机无位置传感器控制技术的创新与发展。
1.3 研究意义永磁同步电机无位置传感器控制技术的研究意义在于推动电机控制技术的发展和应用。
随着科技的不断进步,对电机系统的性能要求越来越高,传统的位置传感器在一些特殊环境下会受到限制,而无位置传感器控制技术可以有效地解决这一问题。
机器人基础原理_东北大学中国大学mooc课后章节答案期末考试题库2023年

机器人基础原理_东北大学中国大学mooc课后章节答案期末考试题库2023年1.在应用拉格朗日方程方法建立机器人的动力学方程时,尽管所建立的动力学方程比较复杂,但是并没有考虑机器人的形变,即认为机器人的所有连杆都是()。
答案:刚体2.从机器人动力学方程可以看出关节之间存在耦合作用关系。
例如,在水平面上运动的两连杆转动关节机械臂中,关节2的力矩与关节1的()有关。
答案:角加速度##%_YZPRLFH_%##加速度3.机器人关节传动系统中一般都包含减速机,添加减速机后增大了关节的驱动扭矩和旋转速度。
答案:错误4.与机床进给系统相类似,机器人关节的伺服控制包括()控制、速度控制及电流控制。
答案:位置##%_YZPRLFH_%##角度5.光电编码器包括绝对式及增量式两种,增量编码器一般包括A、B、C三相脉冲信号,A相和B相脉冲信号的相位差为()度。
答案:906.笛卡尔空间的轨迹规划是对机械臂末端坐标系原点位置的规划,通过规划使得机械臂末端坐标系的运动满足希望的运动轨迹。
答案:错误7.在()空间对机械臂末端的运动姿态进行规划时,基本方法是寻找等效的姿态变化旋转轴,然后规划机械臂末端绕相应的旋转轴按时间序列转动,得到期望的姿态运动过程。
答案:笛卡尔,任务8.在笛卡尔空间或关节空间对机械臂进行轨迹规划后,将得到的轨迹数据输入给机械臂关节的()系统,即可使机械臂按规划的轨迹进行运动。
答案:控制,伺服9.力控制与位置控制存在明显的不同。
当物体运动的位置受到外部限制时,系统将无法完成期望的力控制。
答案:错误10.机器人关节的控制可以包括()控制、速度控制、电流控制及力控制等。
答案:位置##%_YZPRLFH_%##角度11.下⾯购物篮能够提取的3-项集的最⾯数量是多少?ID 购买项1 ⾯奶,啤酒,尿布2 ⾯包,⾯油,⾯奶3 ⾯奶,尿布,饼⾯4 ⾯包,⾯油,饼⾯5 啤酒,饼⾯,尿布6 ⾯奶,尿布,⾯包,⾯油7 ⾯包,⾯油,尿布8 啤酒,尿布9 ⾯奶,尿布,⾯包,⾯油10 啤酒,饼⾯答案:312.哪个不是KNN的优点?答案:可以解决回归问题13.无监督学习的常见类型是()和()。
永磁同步电机新型滑模观测器无传感器矢量控制调速系统
永磁同步电机新型滑模观测器无传感器矢量控制调速系统一、本文概述随着现代电力电子技术和控制理论的不断发展,永磁同步电机(PMSM)因其高效率、高功率密度和优良的控制性能在诸多领域,如电动汽车、风力发电、工业自动化等,得到了广泛应用。
然而,传统的PMSM控制系统通常依赖于位置传感器来获取电机的转速和位置信息,这不仅增加了系统的复杂性,还降低了系统的可靠性和稳定性。
因此,研究并开发无传感器矢量控制调速系统对于提高PMSM的性能和适用范围具有重要意义。
本文旨在研究一种新型的滑模观测器无传感器矢量控制调速系统,旨在解决传统PMSM控制系统对位置传感器的依赖问题。
文章将介绍永磁同步电机的基本工作原理和控制策略,为后续研究奠定理论基础。
接着,将详细阐述滑模观测器的设计原理及其在PMSM无传感器控制中的应用,包括滑模观测器的数学模型、稳定性分析和优化方法。
在此基础上,将探讨基于滑模观测器的无传感器矢量控制调速系统的实现方法,包括转速估计、矢量控制和调速策略等。
通过仿真和实验验证所提系统的有效性和优越性,为PMSM无传感器控制技术的发展提供新的思路和解决方案。
本文的研究不仅对于提高PMSM的性能和稳定性具有重要意义,也为其他类型电机的无传感器控制提供了有益的参考和借鉴。
本文的研究成果有望为相关领域的技术创新和应用推广提供理论支持和实践指导。
二、永磁同步电机及其控制系统概述永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电动机,其设计基于同步电机的原理,并采用永磁体作为其磁场源,从而省去了传统电机中的励磁绕组和相应的励磁电流。
由于其高功率密度、高效率以及优良的调速性能,PMSM在电动汽车、风电、工业自动化等领域得到了广泛应用。
PMSM的控制系统是实现其高性能运行的关键。
传统的PMSM控制系统通常依赖于高精度的位置传感器(如光电编码器或霍尔传感器)来获取电机的转子位置信息,进而实现准确的矢量控制。
机器人关节的驱动元件

机器人关节的驱动元件机器人关节的驱动元件是机器人运动的核心部件之一,它负责提供力和扭矩,使机器人能够进行各种复杂的动作和任务。
在机器人系统中,常见的驱动元件包括电机、减速器和传感器等。
1. 电机:电机是机器人关节驱动的主要元件之一。
常见的电机类型有直流电机、交流电机和步进电机等。
直流电机通常使用在需要高速和高扭矩输出的场合,交流电机适用于需要变速调节的场合,而步进电机则适用于需要精确位置控制的场合。
电机通过供电,将电能转化为机械能,驱动机器人关节实现运动。
2. 减速器:减速器是机器人关节驱动系统中的重要组成部分。
由于电机的转速较高,为了满足机器人运动的需求,需要通过减速器将电机的高速转动转换为低速高扭矩输出。
减速器通过齿轮传动或其他机械结构,将电机的转速降低,同时提高输出的扭矩。
减速器的选择要根据机器人的负载要求和运动速度等因素进行匹配。
3. 传感器:传感器在机器人关节驱动系统中起到监测和反馈作用。
传感器可以感知机器人关节的位置、速度、力和力矩等信息,并将这些信息反馈给控制系统。
控制系统根据传感器的反馈,调整电机的输出,实现对关节运动的精确控制。
常见的传感器包括位置传感器、力传感器和编码器等。
4. 控制器:控制器是机器人关节驱动系统的核心部分。
控制器接收传感器的反馈信号,根据预设的控制算法,计算出电机的控制指令,并将控制指令发送给电机驱动器,实现对机器人关节的精确控制。
控制器的设计要考虑到机器人的动态特性、运动要求和安全性等因素。
5. 电源:电源是机器人关节驱动系统的能量来源,为电机和控制器提供稳定的电能。
电源的选择要根据机器人系统的功率需求和电压要求进行匹配,确保系统正常运行。
6. 机械结构:机械结构是机器人关节驱动系统的物理支撑,它包括机器人关节的连杆、连接件和轴承等。
机械结构的设计要考虑到机器人的运动范围、负载要求和刚度等因素,以确保机器人关节的运动平稳和精确。
总结起来,机器人关节的驱动元件包括电机、减速器、传感器、控制器、电源和机械结构等。
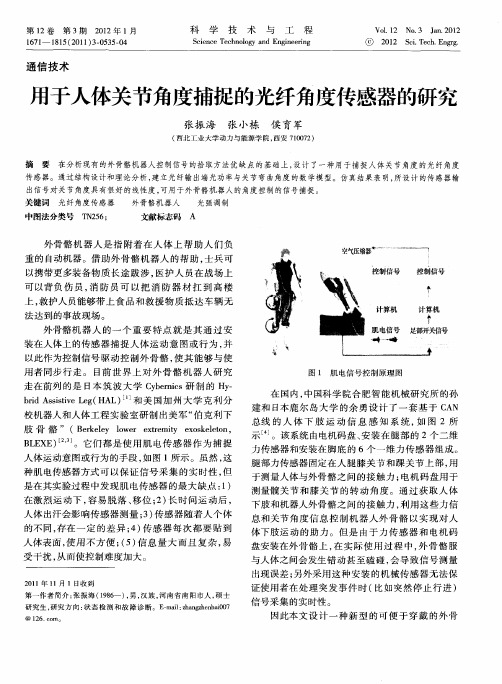
用于人体关节角度捕捉的光纤角度传感器的研究
第一作者简 介 : 张振 海 (9 6 ) 男 , 18 一 , 汉族 , 南省南 阳市人 , 河 硕士 研究生 , 研究方 向 : 状态 检测 和故 障诊 断。E— i:hn zehi 7 ma zagh n a 0 l O
@ 1 6. o 。 2 cr n
证使 用 者在 处 理 突 发 事 件 时 ( 比如 突 然停 止 行 进 )
信号 采 集 的实 时性 。 因此本 文 设 计 一 种 新 型 的 可 便 于 穿 戴 的外 骨
56 3
科
学
技
术
与
工
程
1 2卷
可得 光强 与人体关 节 角度 的特 性 曲线 。 为 了增 强传感 器 的灵 敏度 , 使敏 感 区泄 露 出来 的光 能完 全 被 吸 收 不 再 反 射 或 散射 回到 光 纤 的 内
第 1 2卷
第 3期
21 02年 1月
科
学
技
术
与
工
程
@
V0. 2 N . J n 2 1 11 o 3 a. 02
171 1 1 ( 0 1 3 0 3 —4 6 — 8 5 2 1 ) -5 50
S inc c noo y a d Engn e i ce e Te h lg n ie rng
法 达 到 的事 故现 场 。 外 骨骼 机 器 人 的 一个 重 要 特 点 就 是 其 通 过 安
装 在人 体上 的传 感 器捕 捉 人 体 运 动 意 图 或行 为 , 并
以此 作 为控 制信 号 驱动 控 制 外 骨 骼 , 其 能 够 与使 使 用者 同步 行 走 。 目前 世 界 上 对 外 骨 骼 机 器 人 研 究 走 在 前列 的是 日本 筑 波 大 学 C b mi 研 制 的 H — ye c s y
关节电机的特点_概述说明以及解释
关节电机的特点概述说明以及解释1. 引言1.1 概述关节电机作为一种近年来快速发展的智能驱动装置,在机械工程、自动化领域和机器人应用中广泛应用。
它的出现极大地改善了传统传动装置的局限性,具备了更高精度、更高效率、更稳定可靠和更灵活多变的特点。
本文将对关节电机的特点进行全面概述和解释。
1.2 文章结构本文分为五个主要部分进行讲述。
首先在引言中,对关节电机的背景与意义进行概述,并介绍文章的目录结构。
接下来,在第二部分中,将详细介绍关节电机的定义与分类,以及其各种功能与应用领域。
在第三部分中,我们将探讨关节电机的工作原理、结构组成和控制方式等方面进行说明。
然后,在第四部分中,将着重解释关节电机所具备的高精度运动控制能力、可靠性和稳定性以及灵活多变的运动模式选择能力。
最后,在结论部分总结关节电机的特点和应用领域,并展望其未来发展方向和前景。
1.3 目的本文的目的是全面概述和解释关节电机的特点,帮助读者更好地了解这一驱动装置的工作原理、应用领域以及其所具备的优势和不足之处。
同时,通过对其特点的分析和展望,为未来关节电机技术发展提供参考和启示。
本文适用于从事相关领域研究或对关节电机感兴趣的读者阅读参考。
接下来我们将进入第二部分,详细介绍关节电机的特点。
2. 关节电机的特点:2.1 定义与分类:关节电机是一种能够模拟人体关节运动的执行器。
它由驱动装置、传感器和控制系统组成。
根据其结构和使用方式的不同,关节电机可以分为直线型、旋转型和仿生型等多种类型。
2.2 功能与应用:关节电机具有精确的位置控制和灵活的运动模式选择能力。
它广泛应用于工业自动化、航空航天、医疗设备以及服务机器人等领域。
在工业自动化中,关节电机可以实现高速准确定位,提高生产效率;在航空航天领域,关节电机被广泛应用于飞行控制系统和导航系统中;在医疗设备上,关节电机可用于支持和辅助患者运动、进行手术操作等;而在服务机器人领域,关节电机则起到驱动机器人执行各类复杂任务的作用。
电机转子位置传感器的评述与发展趋势
Re v i e ws a n d De v e l o p me nt Tr e nd o f Ro t o r Pos i t i on Se ns o r s f or Mo t o r s WANG Ch e n g , DENG Zhi — q u a n。 C A I J u n 一, HU R o n g — g u a n g
2 . U n i v e r s i t y o f S h e f i e l d , S h e f f i e l d S 1 3 J D, U K)
Ab s t r a c t : A s a c o mmo n e l e c t i r c a l d r i v e d e v i c e s , mo t o r s a r e w i d e l y u s e d i n a e r o s p a c e ,i n d u s t r i a l a u t o ma t i o n,h o me a p — p l i a n c e s a n d o t h e r o c c a s i o n s .W i t h t h e e x p a n s i o n o f r e s e a r c h,s wi t c h e d r e l u c t a n c e mo t o r s ,p e r ma n e n t ma g n e t s y n c h r o n o u s mo t o r s ,b r u s h l e s s DC mo t o r s a n d o t h e r n e w t y p e s o f mo t o r s h a v e b e e n p r o p o s e d .T h e s e mo t o r s c a n n o t w o r k wi t h o u t r o t o r p o — s i t i o n s i g n a 1 .Ro t o r p o s i t i o n s e n s o r i s t h e mo s t c o mmo n l y u s e d d e v i c e t o d e t e c t r o t o r p o s i t i o n,a n d t h e a c c u r a c y a n d e n v i r o n — me n t a l a d a p t a b i l i t y w i l l d i r e c t l y a f f e c t t h e p e r f o r ma n c e o f s y s t e m.T h i s p a p e r s u mma r i z e s s e v e r a l t y p e s o f s e n s o r s a n d e l a b o —
基于MRAS的永磁超环面电机无位置传感器控制
型 。 基 于 无 位 置 传 感 器 控 制 的 优 点 , 设 计 了 基 于 模 型 参 考 自 适 应 (MRAS) 的 永 磁 超 环 面 电 机 无 位 置 传 感 器 控 制 系 统 ,
并 进 行 了 该 控 制 系 统 的 仿 真 。 仿 真 结 果 表 明 , 基 于 MRAS 的 永 磁 超 环 面 电 机 转 速 估 计 误 差 较 小 , 模 型 参 考 自 适 应 控
永磁超环面电机是一种新型的特种电机,目前国内 外对该电机的研究主要集中在电机结构设计优化、工作 原 理 分 析 和 动 力 学 研 究 [3-4]。 永 磁 超 环 面 电 机 控 制 方 法 的研究是该电机研究的重要环节,设计合适的控制方法 对永磁超环面电机进行调速以达到良好的控制效果,而
* 基 金 项 目 : 国 家 自 然 科 学 基 金 ( 51207107 )
Abstract : Based on the analysis of the structure and driving mechanism of the permanent magnet toroidal motor, the inductance of the motor was analyzed and calculated, the mathematical model was established. Based on the advantages of position sensorless control, the position sensorless control model based on model reference adaptive system ( MRAS ) applied for permanent magnet toroidal motor was designed, the simulation of control system was established. The simulation results show that the motor speed and the position angular of the planet carrier rotor error based on MRAS are small, the control system based on MRAS can estimate the planet carrier rotor angular speed accurately, and the control method is effective. Key words : permanent magnet toroidal motor ; mathematical model ; position sensorless control ; MRAS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 图分 类 号 :H1 9T 2 2 1 T 3 ; P 1. 3
文 献标 识 码 : A
文 章 编 号 :0 0 9 8 2 1 )2—07 0 10 —4 9 (0 0 1 0 5— 3 成 反 比 。 在 这 里 我 们 选 取 特 定 霍 尔 器 件 , 以 认 为 Rn 可 和 d是 霍 尔 器 件 的 固 有 特 性 , 为 定 值 ; 由霍 尔 器 件 提 供 , 是 一 个 定 值 ; 以 , 尔 元 件 的输 出 电 压 ¨ 仅 也 所 霍 和 磁 感 应 强 度 B 有 关 ,随 磁 感 应 强 度 的 变 化 而 线 性 变
前 霍 尔 器 件 检 测 磁 场 的 极 限 为 1 T 。 0 E
9 。 这 两 个 信 号 求 反 正 切 ,即 可 得 磁 钢 对 应 角 度 。 即 0。
0=aca / ) 利 用 这 一 原 理 , 计 了 电 机 一关 节 rtn( 。 设
位 置 传 感 器 电路 。 原 理 如 图 2 。 图 2中 ,霍 尔 芯 片 输 出 4个 模 拟 信 号 ,经 过 I N. A3 7差 模 放 大 、RC 滤 波 ,成 为 具 有 相 位 差 9 。 一 对 3 0的
检 测 单 元 得 以 集 成 在 一 个 位 置 传 感 器 电路 板 上 。
利 用 霍 尔 元 件 这 一 特 点 , 采 用 2 —VH 一 1 D 1芯 片 作 为 角 度 传 感 器 。 2 —vH 一 1 D 1芯 片 具 有 两 组 霍 尔 传 感 器 , 直 布 置 , 大 角 度 误 差 小 于 1。 磁 钢 旋 转 时 , 垂 最 。当
RH= 1 n ) /( e
1 霍 尔 传 感 器
1 .1 霍 尔 传 感 器 原 理
芯 片 会 感 应 出 两 组 信 号
和 , 两 个 信 号 相 位 差
1 7 年 霍 尔 ( l) 研 究 电 流 通 过 有 磁 场 垂 直 其 89 Ha1 在 平 面 的 长 方 形 金 属 片 所 发 生 的 现 象 时 ,发 现 了 在 金 属 片 的 侧 面 产 生 了 微 弱 的 电 位 差 ,这 种 物 理 现 象 被 人 们 称 为 霍 尔 效 应 。2 0世 纪 5 年 代 后 半 期 , 化 合 物 半 导 0 对 体 的研 究 ,导 致 了 对 高 迁 移 率 的 新 型 半 导 体 材 料 的 开 发 , 一 进 步 促 进 了霍 尔 器 件 的 研 究 、 发 和 应 用 。 目 这 开
随 着 机 器 人 技 术 的 发 展 ,需 要 有 更 / b更 轻 的 机 器
人 工 作 在 诸 如 太 空 等 特 殊 环 境 ,这 对 机 器 人 关 节 的 检 测 反馈 系统 提 出 了更高 的要 求 。然 而普 通工 业 机器 人 关 节 通 常 装 备 的 位 置 传 感 器 ( 码 盘 ) 积 大 、 成 度 如 体 集
。
绝 对 位 置 的 特 点 ,将 其 用 于 关 节 位 置 和 电 机 位 置 测
量 。 是 由 于 受 尺 寸 限制 , 尔 传 感 器 芯 片 只 能 检 测 处 但 霍 于 回转 中 心 磁 钢 的磁 场 强 度 , 图 1 限 制 了 磁 钢 霍 尔 如 ,
感应 强度 的是磁 钢 。 钢是 一个 磁 圆 柱 体 , 径 1 5 mm , 度 0 5 直 . 厚 . mn , S极 如 图 1 当 磁 钢 在 霍 lN、 。 尔芯 片上 方旋 转 , 感 应强 度 B 磁 会 随 着旋 转发 生周 期性 变 化 , 霍
步 的 两枚 磁 钢 旋 转 时产 生 变换 的磁 感应 强度 , 霍 尔输 出电 压 产 生 变 化 , 使 经过 处理 可得 到 关节 和 电机 角度 。 测 试证 实 , 传
感器满足精
关 键 词 : 尔 芯 片 关 节 角 度 电 机 角 度 霍 位 置 传 感 器
传感 器 的使用 范 围。
我 们 研 制 的 基 于 磁 钢 霍 尔 元 件 的 高 集 成 度 的 位 置 传 感 器 , 得 分 别 和 电机 、 节 转 动 同 步 的 磁 钢 布 置 在 使 关
尔 输 出 电 压
变化 。
也 因 此 发 生 周 期
具 有 平 行 轴 线 的 同 一 平 面 上 , 电 机 一关 节 位 置 传 感 器
低 , 难满 足要 求 。 很 为 了满 足 位 置 传 感 器 体 积 小 、 成 度 高 的 要 求 , 集 可
以 利 用 磁 钢 霍 尔 元 件 体 积 小 、 量 轻 、 接 触 、 检 测 重 非 可
化 , 以 用 作 检 测 磁 感 应 强 度 的 传 感 器 可
1 2 霍 尔芯 片 及 处 理 电路 . 与 霍 尔 传 感 器 配 合 产 生磁
一
种 新 型 电机 一关节 位 置 传 感 器 的研 究 六
口 张彦 鹏 口 朱 映远 口 刘 宏
哈 尔 滨 工 业 大 学 机 器 人 技 术 与 系 统 国家 重 点 实 验 室 哈 尔 滨 1 00 50 1
摘
要 : 用磁 钢 霍 尔元 件 体 积 小 非接 触 的 特 点 , 其 作 为机 器人 关 节与 电机 角度 的检 测 单 元 。与 电机 和 关 节 转 动 同 利 将
模 拟 信 号 , 过 A/ 转 换 成 数 字 信 号 传 送 到 F G 通 通 D P A
信 控 制 器 , F GA 将 每 个 关 节 模 块 的 4个 信 号 传 递 到 P
可 以知道 , 尔元件 的输 出 电压为 : 霍
= R。 . /d 一 B ( ) 1
DS 由 DS 进 行 反 正 切 计 算 , 到 关 节 和 电 机 角 度 。 P, P 得