吊篮式移栽机栽植器运动参数的研究_刘磊
吊篮式移栽机毕业设计(CAD图纸)

吊篮式移栽机毕业设计(CAD图纸)————————————————————————————————作者:————————————————————————————————日期:Qq:1269408632目录摘要 (4)abstract (4)1.移栽机械的国内外现状 (5)1。
1移栽机类型及特点 (5)1。
2 移栽机工作部件及栽植原理 (5)1. 2。
1钳夹式移栽机 (5)1。
2。
2 挠性圆盘式移栽机 (5)1. 2. 3 吊篮式移栽机 (5)1. 2. 4 导苗管式移栽机 (5)1. 2。
5 鸭嘴式移栽机 (6)1。
3移栽技术的发展现状 (6)1.4取苗机构的研究进展 (6)1。
5 送苗机构的研究进展 (7)1. 6栽植机构的研究进展 (7)1.7我国移栽机发展存在的问题及发展方向 (7)2. 吊篮式移栽机旋转杯式喂苗机构特点 (8)2。
1旋转杯式喂苗机构特点 (8)2.2 主要工作部件的结构特点及作用 (8)2。
2.1 苗杯 (9)2.2.2 槽轮机构 (10)2。
2.3 传动机构 (11)3.轴的校核 (12)3.1Ⅰ轴的设计计算 (12)3。
1.1材料的选择及轴颈的确定 (12)3.1.2确定各轴段直径 (13)3。
1.3各轴段的长度 (13)3。
1。
4 轴承的校核 (14)3.1.5与联轴器的连接轴的键的设计与校核 (14)3。
2 Ⅱ轴的设计计算 (14)3。
2.1轴径的确定 (15)3。
2.2各轴段长度的确定 (15)3。
2。
3 轴承的校核 (16)3.2.4键的选择与校核 (16)3。
3 Ⅲ轴的设计 (17)3。
3.1轴径的确定 (17) (17)3.3.2各轴段直径的确定 (17)3.3。
3各轴段长度的确定 (18)3.3。
4轴承的校核 (18)3。
3.5 联轴器的选择 (19)4。
润滑与密封的设计 (19)4。
1润滑设计 (20)4.2 密封设计 (20)5. 机架设计与说明 (20)5.1箱体的设计 (20)5.2 箱盖顶部外表面轮廓的确定 (20)5.3齿轮1处的箱盖顶部外表面轮廓的确定 (20)5.4底座凸缘厚度 (21)5。
吊篮式棉花移栽机分钵落苗装置设计与仿真分析(1)
— 110 —
图 3 活塞受力变化曲线 图 4 垂直推杆复位压缩弹簧受力曲线 (下转第 111 页)课程的教学改革与研究
淮阴工学院 于长辉
[摘 要]《面向对象程序设计》是一门专业基础课程,具有完善的系统知识结构和语法规则,与理论密切配合的实践操作等特点。因 此在教学过程中应该注重模块化教学思路和模块化教学方法,注重挖掘模块感性化知识,从学生实际情况出发设计实验内容与要 求,切实培养学生融会贯通应用知识进行创新的能力。 [关键词]面向对象程序设计 模块化教学 知识创新
— 111 —
气缸
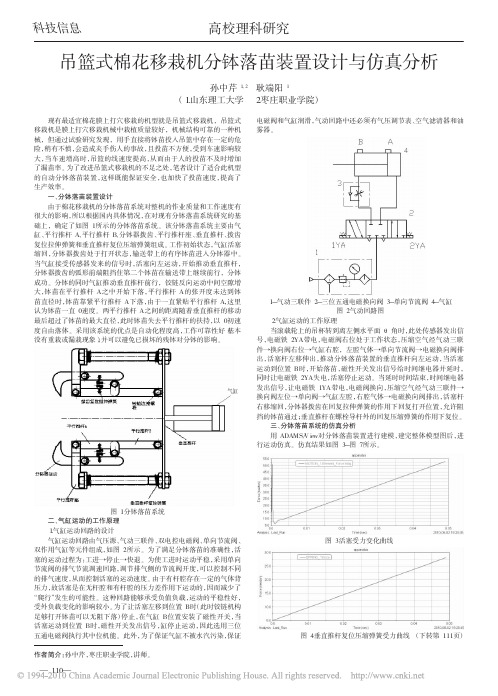
电磁阀和气缸润滑,气动回路中还必须有气压调节表、空气滤清器和油 雾器。
1- 气动三联件 2- 三位五通电磁换向阀 3- 单向节流阀 4- 气缸 图 2 气动回路图
2.气缸运动的工作原理 当滚载轮上的吊杯转到离左侧水平面 θ 角时,此处传感器发出信 号,电磁铁 2YA 带电,电磁阀右位处于工作状态,压缩空气经气动三联 件→换向阀右位→气缸右腔,左腔气体→单向节流阀→电磁换向阀排 出,活塞杆左移伸出,推动分钵落苗装置的垂直推杆向左运动,当活塞 运动到位置 B 时,开始落苗,磁性开关发出信号给时间继电器并延时, 同时让电磁铁 2YA 失电,活塞停止运动。当延时时间结束,时间继电器 发出信号,让电磁铁 1YA 带电,电磁阀换向,压缩空气经气动三联件→ 换向阀左位→单向阀→气缸左腔,右腔气体→电磁换向阀排出,活塞杆 右移缩回,分钵器拨齿在回复拉伸弹簧的作用下回复打开位置,允许阻 挡的钵苗通过;垂直推杆在螺栓导杆外的回复压缩弹簧的作用下复位。 三、分钵落苗系统的仿真分析 用 ADAMS/View 对分钵落苗装置进行建模,建完整体模型图后,进 行运动仿真。仿真结果如图 3- 图 7 所示。
基于 ADAMS 的移栽机栽植机构动力学探讨

( a )土壤模型边线划分
的D P材料 近 似 模 拟 , 基 本 可 以满 足 精 度 要 求 ¨ J 。
考虑到钵苗移栽设计 深度 6 0 a r m、 鸭嘴栽植部设计 宽
2 虚拟模型建立与仿真
栽植 器 工作 过程 中 , 除机 构 自身 运转 不 平 衡 产 生
的惯性力和惯性力矩外 , 栽植机构所受的冲击还表现
在 鸭嘴 与 土 壤 作 用 过 程 。鸭 嘴 入 土 瞬 时 受 到 来 自地
面土壤巨大的反作用力 , 其对机构性能稳定性尤其是
对 机构 拐臂 铰 接处 的 冲击 尤 为 明 显 , 频 繁 的 冲击 会 导
以使鸭 嘴 近乎 垂直 栽 苗 , 以保 证钵 苗定 植 后 具 有 较 好 直 立 度 。钵苗 定 植 过 程 中 , 鸭 嘴 的开 合 由拉 线 控 制 。 当鸭 嘴进 入栽 植地 块 土 壤后 , 设 计 适 时 控制 鸭嘴 开 合 时间 , 可 以较 好保 证秧 苗 的定 植 质量 。
致机构工作稳定性降低和理论寿命缩短。因此 , 有必 要 对机 构 的 这 一 动 不 平 衡 冲击 特 性 进 行 分 析 。 。 。
为此 , 分别建立土壤与栽植机 构的虚拟模 型 , 通 过 虚
拟 仿 真重 点 分 析 探 讨 栽 植 机 构 在 钵 苗 定 植 过 程 中 的
动力 学 特性 。 2 . 1 土壤 模型 建立
图2 ( b ) 所示 。
表 1 土壤 模 型参 数
Ta b l e 1 Pa r a me t e r s o f s o i l mo d e l
2YZS烟草移栽机移栽装置的设计
2 0 1 4年 2月
农 机 化 研 究
第 2期
2 Y Z S 烟 草 移 栽 机 移 栽 装 置 的 设 计
楚 宜 民 ,燕 亚 民
(许 昌职 业 技 术 学 院 ,河 南 许 昌 4 6 1 0 0 0 )
摘
要 : 阐 述 了 吊 篮式 烟 草 移 栽 机 移栽 机构 的工 作 原 理 和 结 构 , 通过分析计算及 1 : 1的建 模 , 验 证 了 吊篮 式 烟
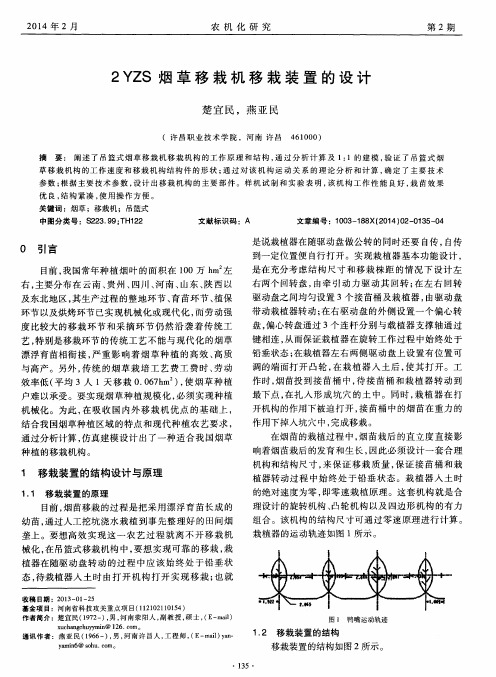
是说栽植器在随驱动盘做公转 的同时还要 自传 , 自传 到一定位置便 自行打开 。实现栽植 器基本功能设计 ,
是 在充 分 考 虑 结 构 尺 寸 和 移 栽 株 距 的情 况 下 设 计 左
右, 主要分布在 云南 、 贵州 、 四川 、 河南 、 山东 、 陕西以 及东北地区 , 其生产过程 的整地 环节 、 育苗环节 、 植保 环节 以及烘烤环节 已实现机械化或现代化 , 而劳动强 度 比较大的移栽 环节和采摘 环节仍 然沿 袭着传 统工 艺, 特别是移栽环节的传统 工艺不能与现代化 的烟草
9 . 鸭嘴 1 0 . 驱动转轴
7 . 连杆
8 . 偏心转盘
机械化 。为此 , 在 吸收 国内外移栽机 优 点的基础 上 , 结合我国烟草种植 区域 的特点 和现代种植农 艺要求 , 通过分析计算 , 仿真建模设计 出了一种适合我 国烟草
吊篮式移栽机栽植器的研究
1 吊篮 式移栽 机 的工作原 理及 主要 技术 参数
收 稿 日期 :2009—09—13 基金项 目:大学重大科技攻关项 目( s2006一zdgg03) 作者简 介 :武 科 (1983一),男 ,安 徽 宿 州 人 ,硕 士 ,(E —mail)
wuke830612@ 163.tom。
1.2 主 要 特点 1)吊篮对 秧 苗 不施 加 强 制夹 持 力 ,因此适 宜 于 柔
嫩 秧苗 、大钵 及钵 体 易 碎秧 苗 的 移栽 ; 2)吊篮在投放秧苗的过程中对苗体起扶持作 用 ,
有 利 于秧 苗 直立 ; 3)可进 行膜 上 移 栽 ; 4)易于 实 现 窄行 距移 栽 。
在 国 内外 得 到 了广 泛 的 应 用 。 目前 ,国 内对 吊篮 式 移 栽 机 的 研 究 尚 不 够 深 入 ,基 本 参 数 之 间 的 关 系 和设 计 计 算
仍 然 是 一 个 需 要 解 决 的 关 键 问 题 。 为此 ,初 步 进 行 了 吊篮 式 移 栽 机 栽 植 器 的 运 动 参 数 的 研 究 ,由 吊篮 式 移 栽 机
2010年 6月
农 机 化 研 究
第 6期
吊 篮 式 移 栽 机 栽 植 器 的 研 究
武 科 ,毕 新 胜 ,陈永 成
(石河 子 大学 机械 电气 工 程 学 院 ,新 疆 石河 子 832000)
摘 要 :随 着 我 国 经 济 作 物 生 产 规模 的迅 速 扩 大 ,广 大 农 区迫 切 需 要 移 栽 机 械 。 吊 篮 式 移 栽 机 以其 独 特 的 优 点
的运 动 轨 迹 建 立 了Fra bibliotek 植 器 的 运 动 方 程 ,推 导 出特 征 系 数 入 的值 ;根 据 “特 征 参 数 A≥ 1是 栽 植 器 正 常 工 作 的 必 要
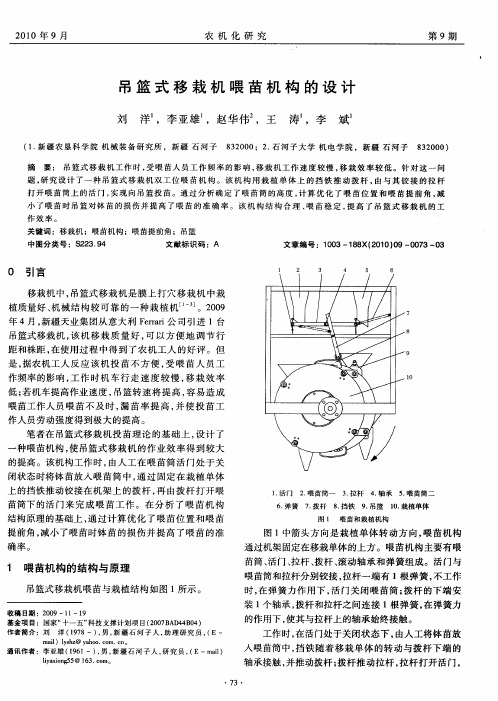
吊篮式移栽机喂苗机构的设计
摘
要 : 吊篮式 移栽 机 工 作 时 , 喂 苗人 员 工 作 频 率 的影 响 , 栽 机 工 作速 度 较 慢 , 栽 效 率 较 低 。针 对 这 一 问 受 移 移
题 , 究 设计 了一 种 吊 篮式 移 栽 机 双 工位 喂 苗 机 构 。 该 机 构 用 栽 植 单 体 上 的 挡 铁 推 动 拨 杆 , 与 其 铰 接 的 拉 杆 研 由
ma )l h @ y h o c m. n i y z ao. o c 。 l s
工作时 , 在活门处于关闭状态下 , 由人工将钵苗放 人喂苗筒 中, 挡铁随着移栽单体 的转动与拨杆下端 的
轴承 接触 , 推动 拨杆 ; 并 拨杆 推 动 拉 杆 , 杆打 开 活 门 , 拉
通讯作者 :李亚雄 ( 9 1一) 男 , 疆 石 河 子人 , 究员 , E—ma ) 16 , 新 研 ( i l
1活 门 . 2喂茁筒一 . 3拉杆 . 4 轴承 . 5 喂 茁 简 二 .
苗筒 下 的 活 门来 完 成 喂 苗 工 作 。在 分 析 了 喂 苗 机 构
结构 原理 的基 础 上 , 过 计 算 优 化 了喂 苗 位 置 和 喂苗 通
6 弹簧 .
7 拨杆 .
8 挡铁 .
9 吊篮 .
1. 0 栽植 单体
图 1 喂 苗 和 栽 植 机 构
提前 角 , 减小 了喂苗 时 钵 苗 的损 伤 并 提 高 了 喂苗 的准
确率。
图1 中箭头方 向是栽植单体转 动方 向, 喂苗机 构 通过机架固定在移栽单体的上方。喂苗机构 主要有喂
苗筒、 门、 活 拉杆 、 杆 、 拨 滚动 轴 承 和 弹簧 组 成 。活 门 与 喂苗筒 和拉 杆分 别 铰接 , 拉杆 一 端 有 1 弹 簧 , 工作 根 不 时 , 弹 簧 力作 用 下 , 门 关 闭 喂苗 筒 ; 杆 的下 端 安 在 活 拨 装 1个轴 承 , 拨杆 和拉 杆之 间连 接 1 弹 簧 , 弹 簧力 根 在 的作 用下 , 其 与拉杆 上 的轴 承始 终接 触 。 使
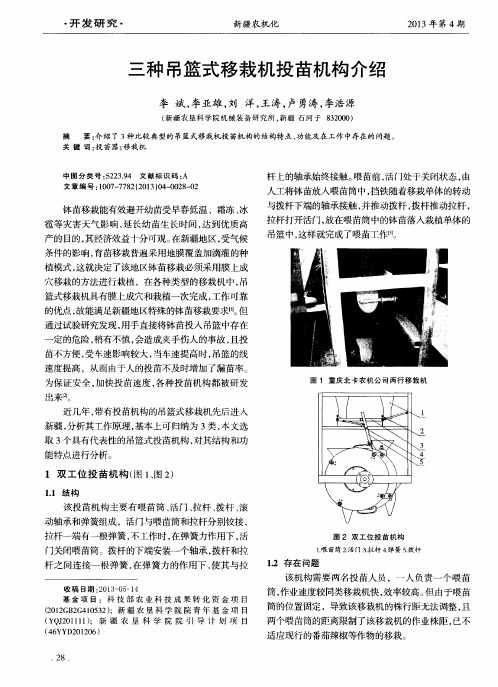
三种吊篮式移栽机投苗机构介绍
新疆农机化
・ 开发 研 究 ・
换 为水 平转 动 , 从而带 动 喂苗筒 转 动 , 支 架 固定在 投
苗位置 , 喂苗筒转动到投苗位置时 , 重锤沿支架平面 运动 , 在投苗点位置 , 重锤上升 , 使喂苗筒鸭嘴张开 , 钵苗掉人下方移栽 吊杯中, 完成一次投苗。
图 4 意 大利 F er r a r i 公 司移 栽 机
( 4 6 YYD2 0 1 2 O 6)
筒, 作业速度较同类移栽机陕, 效率较高。 但由于喂苗
筒 的位置 固定 ,导致该 移栽机 的株行距 无法调整 , 且 两个喂苗筒 的距 离限制 了该移 栽机 的作 业株距 , 已不
适应现行的番茄辣椒等作物的移栽。
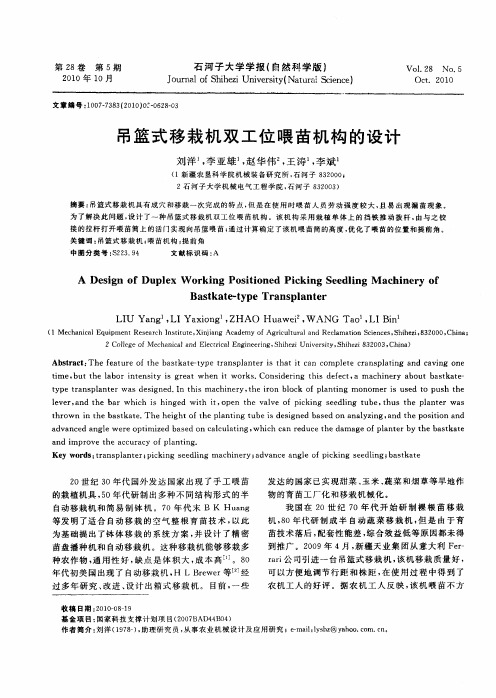
2 0 1 3 年第 4 期 2 链 排 式投 苗 机构 ( 图3 )
钵苗移栽 能有效避开幼 苗受早春低温 、霜冻 、 冰 雹 等灾 害天气 影 响 , 延长 幼苗 生长 时间 , 达到优 质 高
与拨杆下端的轴承接触 , 并推动拨杆 , 拨杆推动拉杆,
拉 杆打开活 门 , 放在 喂苗筒 中的钵苗落入 栽植单体 的 吊篮 中, 这样就完成 了喂苗工作 。
图 3 链 排式 投 苗机 构
1 . 链轮组 2 . 苗盘 固定 架 3 . 取 苗器 4 . 喂 苗 盒
图 5 轮 盈 式 投 苗 机 构
2 . 1 结 构
1 转盘 2 . 喂苗筒 3 . 重锤 4 . 支架 5 . 齿轮换向装置
该投苗机构主要由苗盘固定架、 取苗器、 喂苗盒 、
链轮组 等组成 , 一组 喂苗盒 与链条 相连 , 工作 时 , 链 条
1 . 喂苗筒 2活门3 拉杆 4 . 弹簧 5 l 拨杆
吊篮式移栽机双工位喂苗机构的设计
t o n t s ka e The heg ft l ntng t e i e i e s d on a a y i g, n hepo ii n a hr wn i heba t t . i hto he p a i ub sd sgn d ba e n l z n a d t sto nd
Ab ta t Th e t r ft e b s k t — y e t a s l n e s t a tc n c mp e e c a s l tn n a i g o e s r c : e f a u e o h a t a e t p r n p a t r i h ti a o lt r n p a i g a d c v n n tme b t t e l b r i t n i s g e t wh n i wo k . n i e i g t i e e t a ma h n r b u a t a e i , u h a o n e st i r a e t y r s Co s d rn h s d f c , c i e y a o t b s k t — t p r n p a t r wa e i n d I h s ma h n r , h r n b o k o l n i g m o o r i u e o p s h y e t a s ln e s d sg e . n t i c i e y t eio l c fp a tn n me s s d t u h t e lv r a d t e b r wh c s h n e t t o e h a v f p c i g s e l g t b , h s t e p a t r wa e e , n h a ih i i g d wih i , p n t e v l e o ik n e d i u e t u h l n e s n
吊篮式移栽机栽植机构的设计与研究
吊篮式移栽机栽植机构的设计与研究吊篮式移栽机栽植机构的设计与研究引言:吊篮式移栽机是一种用于农田作业的机械设备,该设备能够实现栽植作物的自动化过程,提高农田作业效率,减轻劳动强度。
本文将对吊篮式移栽机的栽植机构进行设计与研究,探讨如何进一步提高其效率和稳定性。
一、运动学分析吊篮式移栽机的栽植机构主要包括栽植刀、传送装置、旋转装置等。
根据植物生长习性和机械运动学原理,栽植刀应具备一定的切削能力,并能准确插入土壤深度。
传送装置需要具备稳定的运动性能,使栽植刀能够准确地取出植物,并将其移动到正确的位置。
旋转装置则能使栽植刀在运动过程中保持稳定。
二、栽植刀设计栽植刀是吊篮式移栽机最重要的工作部件之一,其设计直接关系到栽植的效果。
栽植刀的形状应能够轻松地穿过土壤,并且具备一定的切削能力。
在栽植刀的前端可以设置一些锯齿,增加切削面积,减小插入土壤时的阻力。
同时,栽植刀的刀尖应设计为尖锐的形状,方便插入土壤。
三、传送装置设计传送装置是将取出的植物移动到正确位置的重要组成部分。
为了减小栽植过程中的振动和冲击,传送装置可以采用液压驱动,使得植物的运动更加平稳。
此外,传送装置应具有可调节的功能,以适应不同大小和高度的植物。
四、旋转装置设计旋转装置是为了保持栽植刀在运动过程中的稳定性。
通过设置旋转装置,栽植刀能够实现360度的旋转,方便栽植。
旋转装置的设计需要考虑安全性和稳定性,以避免在栽植过程中出现意外情况。
五、栽植机构的优化在吊篮式移栽机的栽植机构设计中,除了栽植刀、传送装置和旋转装置之外,还可以考虑其他的优化措施。
例如,可以对吊篮式移栽机进行智能化改造,通过图像识别技术自动判断植物的生长状态和栽植位置,从而提高栽植的效率和准确性。
此外,还可以对栽植刀进行材料和结构的优化,提高其寿命和使用稳定性。
结论:吊篮式移栽机的设计与研究对于农田作业的自动化提供了重要支持。
在栽植机构的设计中,栽植刀、传送装置和旋转装置是关键的部件,其稳定性和效率直接影响到栽植的效果。
吊篮式移栽机核心机构的设计制造
吊篮式移栽机核心机构的设计制造吊篮式移栽机核心机构的设计制造引言:随着农业生产技术的进步和劳动力成本的上升,机械化农业设备在农田种植和收割等环节中得到了广泛应用。
作为农业机械化领域的重要一环,吊篮式移栽机在大面积规模的种植中起着至关重要的作用。
本文将对吊篮式移栽机核心机构的设计制造进行探讨,并提出一种新颖的设计方案。
一、吊篮式移栽机的工作原理吊篮式移栽机是一种通过吊篮机构进行种植物移栽的机械设备。
其主要工作原理是通过一个具有一定倾角的吊篮,将移栽苗木从苗床上抓取,并将其准确地移栽到农田中的指定位置。
吊篮机构通常由液压系统、电控系统、吊篮结构和牵引装置等几个部分组成。
其中,液压系统负责提供动力,电控系统用于控制操作,吊篮结构承载作用,牵引装置实现移动。
二、吊篮式移栽机核心机构的设计要点1. 吊篮结构设计:吊篮结构的设计直接影响到移栽机的工作稳定性和抓取准确性。
合理的吊篮结构应具有足够的承载能力,同时保证良好的机动性和转动灵活度,使得机器能够适应不同地形和作业需求。
2. 液压系统设计:液压系统是移栽机的动力源,其设计应充分考虑动力传输的平稳性和可靠性。
系统中应采用高质量的液压元件,确保系统的稳定运行。
同时,应设置合理的液压阀门和调节装置,保证系统的灵活性和调控性。
3. 电控系统设计:电控系统是移栽机的智能化控制核心,其设计要考虑到工作流程的自动化和智能化。
系统应具备对各个部件的集中控制和监测功能,以便实现高效的操作和安全运行。
4. 牵引装置设计:牵引装置是移栽机在农田中移动的重要组成部分。
合理设计牵引装置可以保证机器的稳定性和可靠性,同时提高机器的工作效率。
三、一种新颖的设计方案基于现有吊篮式移栽机的工作原理和结构特点,我们提出一种新颖的设计方案,旨在进一步提升移栽机的性能和使用效果。
该设计方案主要包括以下创新点:1. 引入自动化控制技术,使得移栽机在工作过程中能够实现全自动抓取和移栽,减轻人工操作的负担,提高工作效率;2. 采用轻质材料与高强度合金材料相结合的新型吊篮结构,增加吊篮的承载力和使用寿命;3. 引入变速传动装置,提高移栽机的机动性和灵活性,使其能适应多样化的地形条件;4. 使用智能感应技术和遥控操作技术,使得移栽机在复杂的作业环境中能够实现精确定位和高效工作。
吊篮式移栽机双工位喂苗机构的设计
吊篮式移栽机双工位喂苗机构的设计刘洋;李亚雄;赵华伟;王涛;李斌【摘要】吊篮式移栽机具有成穴和移栽一次完成的特点,但是在使用时喂苗人员劳动强度较大,且易出现漏苗现象.为了解决此问题,设计了一种吊篮式移栽机双工位喂苗机构.该机构采用栽植单体上的挡铁推动拨杆,由与之铰接的拉杆打开喂苗筒上的活门实现向吊篮喂苗;通过计算确定了该机喂苗筒的高度,优化了喂苗的位置和提前角.【期刊名称】《石河子大学学报(自然科学版)》【年(卷),期】2010(028)005【总页数】3页(P628-630)【关键词】吊篮式移栽机;喂苗机构;提前角【作者】刘洋;李亚雄;赵华伟;王涛;李斌【作者单位】新疆农垦科学院机械装备研究所,石河子,832000;新疆农垦科学院机械装备研究所,石河子,832000;石河子大学机械电气工程学院,石河子,832003;新疆农垦科学院机械装备研究所,石河子,832000;新疆农垦科学院机械装备研究所,石河子,832000【正文语种】中文【中图分类】S223.94Abstract:The feature of the bastkate-type transplanter is that it can complete cransplating and caving one time,but the labor intensity is greatwhen it works.Considering this defect,a machinery about bastkatetype transplanter was designed.In this machinery,the iron block of planting monomer is used to push the lever,and the bar which is hinged withit,open the valve of picking seedling tube,thus the planter was thrown in the bastkate.The height of the planting tube is designed based on analyzing,and the position and advanced angle were optimized based on calculating,which can reduce the damage of planter by the bastkate and improve the accuracy of planting.Key words:transplanter;picking seedling machinery;advance angle of picking seedling;bastkate20世纪30年代国外发达国家出现了手工喂苗的栽植机具,50年代研制出多种不同结构形式的半自动移栽机和简易制钵机。
国内外移栽机及移栽技术现状分析

(上接第20页)(2)松土齿和挑膜齿把棉秆根挑起来和残膜混合在一起,使残膜回收后无法再利用,而且导致膜箱充满太快,增加卸膜次数,降低机具生产率。
(3)成本高,耗油多、油耗8~10元/667hm 2。
(4)整机仿形不是很理想,容易损坏其它部件(如传动链条易损坏)。
(5)潮湿秸秆被粉碎后易堵塞出风口。
国内外移栽机及移栽技术现状分析卢勇涛,李亚雄,刘洋,李斌,王涛(新疆农垦科学院机械装备研究所,新疆石河子832000)中图分类号:S223文献标识码:A 文章编号:1007-7782(2011)03-0029-04移栽技术作为一种栽培技术,具有直播难以比拟的优越性。
移栽可以将作物的生育期提前15天左右,有效地避开作物受早春低温、倒春寒、霜冻、冰雹等灾害性气候的影响,提高幼苗的成活率,保证单位作物株数达到农艺要求,并能延长作物生育期,有效地提高单产和作物的品质,具有显著的节本、增产、增收效果。
作物移栽主要分为人工移栽和机械移栽,由于人工移栽成本高、效率低、劳动强度大,并且难以保证栽植质量,逐步被移栽机械所替代。
机械移栽过程中,改善移栽苗栽植状态是很多研究设计部门研究的重点和难点,栽植状态主要包括苗直立度、埋苗率、露苗率、栽植深度变化率、伤苗率等指标[1,2]。
1移栽机的分类近些年,育苗移栽技术成为科研和生产部门关注的热点之一,但对移栽机并没有统一的分类标准,根据不同的分类方式主要分为[5-7]:(1)按移栽机的工作环境分为:旱地移栽机和水田移栽机。
(2)按适应栽植作物的种类分为:棉花移栽机、玉米移栽机、甜菜移栽机等,分类直接与相适应的栽植作物相关。
(3)按秧苗特征分为:裸根苗移栽机和土钵或营养钵苗移栽机。
(4)按自动化程度分为:手动移栽机、半自动移栽机和全自动移栽机。
(5)按栽植器结构特点分为:钳夹式、导苗管式、吊篮式、挠性圆盘式移栽机等。
2国外移栽技术及移栽机研究现状[3-14]世界上移栽技术发展较早的发达国家和地区主要是欧美和日本等国,该技术在早期主要应用于蔬菜和经济作物的移栽,随后逐步用于玉米等粮食作物的移栽。
吊杯式移栽机栽植器运动学分析与试验

吊杯式移栽机栽植器运动学分析与试验崔巍;赵亮;宋建农;林金天【期刊名称】《农业机械学报》【年(卷),期】2012(043)0z1【摘要】Based on the movement trajectory formula of dibble-type planting device, the zero-velocity planting and the least damage of mulch-film was analyzed. The main parameters for transplanter were discussed. The proposed machine was designed and the experiment was carried out. The analysis and experiment showed that it's better to plant seedlings during rising stage of the planting devices. Spacing can be changed by changing the transmission ratio or the number of planting devices.%以吊杯式移栽机栽植器的运动轨迹方程为基础,结合农艺要求,对移栽机进行了零速栽苗和最小破膜条件的理论分析,得出移栽机主要设计参数的计算公式,并进行了机具设计及田间试验.理论分析与田间试验表明,栽植器最佳投苗位置为过最低点后的上升段;株距调整时,应根据实际调整大小决定通过改变传动比还是栽植器个数来实现.【总页数】5页(P35-38,34)【作者】崔巍;赵亮;宋建农;林金天【作者单位】中国农业大学工学院,北京100083;中国农业机械化科学研究院士壤植物机器系统技术国家重点实验室,北京100083;中国农业机械化科学研究院士壤植物机器系统技术国家重点实验室,北京100083;中国农业大学工学院,北京100083;中国农业机械化科学研究院士壤植物机器系统技术国家重点实验室,北京100083【正文语种】中文【中图分类】S233.2【相关文献】1.2 ZB-2型吊杯式移栽机栽植深度数据采集系统的设计 [J], 杨媛;李旭英;何生根;王璐;赵士杰2.吊杯式移栽机栽植株距调节的研究 [J], 迟明路;李旭英;田阳;张小志3.吊杯式栽植器的优化设计及试验 [J], 李旭英;王玉伟;鲁国成;张波;张海军4.蔬菜钵苗高速移栽机吊杯式栽植器参数优化 [J], 王永维;唐燕海;王俊;程绍明5.吊杯式栽植器运动轨迹优化与试验 [J], LIU Yang;WANG Shi-guo;MAO Han-ping;LI Bin;WANG Tao;LI Ya-xiong;HANG Lü-hua因版权原因,仅展示原文概要,查看原文内容请购买。
吊篮式移栽机旋转杯式喂苗机构设计
吊篮式移栽机旋转杯式喂苗机构设计贺益龙;温浩军;刘洋;李斌;王涛【期刊名称】《农机化研究》【年(卷),期】2014(36)2【摘要】针对新疆番茄、线辣椒铺膜加滴灌种植模式的要求,研制了一种膜上移栽机。
该机一次作业可完成辅助喂苗、栽植器破膜成穴移栽和膜面覆土等工序,但是由于结构复杂,喂苗速度受到很大限制。
为此,设计了一套旋转杯式喂苗机构。
其利用外销多槽轮机构带动苗杯进行间歇式转动,可以给工作人员充足的时间进行投苗;通过改变链轮齿数,来调整移栽株距。
该机构使用简单方便,能大大提高整机的工作效率。
%A membrane transplanting machine is designed to improve laying film and drip irrigation planting pattern of Xinjiang tomato and line pepper .By the machine , the feed seedlings device assisted to vote seedlings , the inseminating implement breaking membranes to transplant in holes , membrane surface to earth up and other process can be completed at one time , but the speed is considerably limited duo to the complex structure of the machine .To solve this problem , a rotating cup-type feed seedlings equipment is designed , the use of multi-sheave sector-led investment contributing to seedlings intermittent , by which the staff can have sufficient time to vote seedlings .To change the transplanting spacing in the rows by changing the sprocket tooth number .Furthermore , it is easy to use and can be greatly improve the efficien-cy of the machine .【总页数】3页(P139-141)【作者】贺益龙;温浩军;刘洋;李斌;王涛【作者单位】石河子大学机械电气工程学院,新疆石河子 832000;新疆农垦科学院机械装备研究所,新疆石河子 832000;新疆农垦科学院机械装备研究所,新疆石河子 832000;新疆农垦科学院机械装备研究所,新疆石河子 832000;新疆农垦科学院机械装备研究所,新疆石河子 832000【正文语种】中文【中图分类】S223.92【相关文献】1.吊篮式移栽机间歇式喂苗机构设计分析 [J], 温浩军;贺益龙;颜利民2.吊篮式移栽机双工位喂苗机构的设计 [J], 刘洋;李亚雄;赵华伟;王涛;李斌3.吊篮式移栽机喂苗机构的设计 [J], 刘洋;李亚雄;赵华伟;王涛;李斌4.旋转式水稻钵苗移栽机构移栽臂设计与试验 [J], 叶秉良;吴国环;俞高红;李丽5.吊杯式移栽机喂苗机构改进设计 [J], 郭建业;张艳红;潘张磊因版权原因,仅展示原文概要,查看原文内容请购买。
吊篮式山地移栽机的设计
吊篮式山地移栽机的设计
韩阿丽;燕亚民
【期刊名称】《南方农机》
【年(卷),期】2024(55)5
【摘要】【目的】保证丘陵地区秧苗实时移栽,提高秧苗移栽效率与移栽质量,实现移栽机械化。
【方法】课题组结合我国现代种植农艺要求和不同种植区域的特点,开发设计了一种吊篮式山地移栽机,详细阐述了该吊篮式山地移栽机整机工作原理及移栽变速箱机构、株距调节机构、曲柄连杆机构、鸭嘴移栽器、自动喂料机构等主要部件的结构设计,并通过1∶1的建模及样机试制,在许昌烟草分公司进行了实地实验。
【结果】该机具可一次性完成秧苗预装、垄打孔、秧苗移栽、覆土镇压等多道工序,且移栽深度、漏栽率、株距变异系数都在标准要求范围内,移栽质量完全满足烟草移栽的农艺要求。
【结论】该机具具有作业效率高、移栽深度一致性好、转弯半径小、操作方便等优势,适合于多种小角度倾斜地形和多种类型不同株距作物的移栽,可满足丘陵地块规模化烟草移栽工序的农艺要求。
【总页数】4页(P19-22)
【作者】韩阿丽;燕亚民
【作者单位】许昌市建安区农业机械推广中心;许昌职业技术学院机电与汽车工程学院
【正文语种】中文
【中图分类】S223.92
【相关文献】
1.吊篮式移栽机间歇式喂苗机构设计分析
2.吊篮式膜上移栽机的设计
3.吊篮式移栽机双工位喂苗机构的设计
4.吊篮式移栽机旋转杯式喂苗机构设计
5.吊篮式移栽机喂苗机构的设计
因版权原因,仅展示原文概要,查看原文内容请购买。
吊篮式自动移栽机动态喂苗影响因素分析
吊篮式自动移栽机动态喂苗影响因素分析韩长杰;赵晓伟;郭辉;赵占军;张静;杨宛章【期刊名称】《农机化研究》【年(卷),期】2016(0)7【摘要】A new-style automatic transplanter that is composed of automatic feeding system and nacelle -type planting ap-paratus is designed.Artificial to pick seedling and feed seedling is replaced by automatic feeding system.Because of the seedlings that leave automatic feeding system will move to nacelle in horizontal projectile motion, decreasing of dropping seedling accuracy from field unevenness or speed changeable of automatic transplanter.In order to solve the low dropping seedling accuracy, the dropping seedling of the automatic transplanter is analyzed, and a scheme that changes dropping seedling location of guiding tube is proposed.The mathematics model of the shutter plate length is established, and the model is simulated by Matlab R2011b.when the change of planting apparatus traction frame angle and speed in the course of transplanting, the length variation of the shutter plate length is analyzed in this paper.According to the auto-matic transplanter which is composed of automatic feeding system and planting apparatus with nacelle, some parameters of the model is determined.The results show that when the traction frame of planting apparatus gradually more than -arctan (0.073vm), the dropping seedling edge of guiding tube shift to the speeddirection;when the traction frame of planting apparatus gradually less than -arctan(0.073vm), the dropping seedling edge of guiding tube shift to the speed direction, and then moves at the speed direction;when the tilt angle of traction frame don ' t change, as the speed increases, the dropping seedling location of the guiding tube moves at the reverse speed direction, and as the speed slowly, the dropping seedling location of guiding tube moves at the speed direction, and the best dropping seedling position will not change as only the speed changes.The movement mechanism analysis will provide theoretical foundation for improving the dropping seedling reliability of the nacelle-type automatic transplanter.%吊篮式自动移栽机在移栽过程中遇到移栽地面不平整或车速波动,易造成吊篮式自动移栽机平抛喂苗准确率降低. 为此,通过对吊篮式自动移栽机平抛喂苗运动进行分析,提出了改变苗筒喂苗位置来解决此问题的方法. 通过分析得出:当栽植器机架倾角逐渐大于-arctan(0.073vm )时,苗筒喂苗位置沿车速方向移动. 当栽植器机架倾角逐渐小于-arctan(0.073vm)时,苗筒喂苗位置沿车速方向移动. 当栽植器机架倾角恒定时,车速增大,苗筒喂苗位置需要沿车速的相反方向移动;车速度减小时,苗筒喂苗位置需要沿车速方向移动;最佳吊篮接苗位置不随车速的波动而发生改变. 本研究结论为提高吊篮式自动移栽机喂苗准确性奠定理论基础.【总页数】4页(P110-113)【作者】韩长杰;赵晓伟;郭辉;赵占军;张静;杨宛章【作者单位】新疆农业大学机械交通学院,乌鲁木齐 830052;新疆农业大学机械交通学院,乌鲁木齐 830052;新疆农业大学机械交通学院,乌鲁木齐 830052;新疆农业大学机械交通学院,乌鲁木齐 830052;新疆农业大学机械交通学院,乌鲁木齐830052;新疆农业大学机械交通学院,乌鲁木齐 830052【正文语种】中文【中图分类】S223.92【相关文献】1.吊篮式棉花移栽机分钵落苗装置设计与仿真分析 [J], 孙中芹;耿端阳2.吊篮式移栽机间歇式喂苗机构设计分析 [J], 温浩军;贺益龙;颜利民3.吊篮式移栽机双工位喂苗机构的设计 [J], 刘洋;李亚雄;赵华伟;王涛;李斌4.吊篮式移栽机旋转杯式喂苗机构设计 [J], 贺益龙;温浩军;刘洋;李斌;王涛5.三种吊篮式移栽机投苗机构介绍 [J], 李斌;李亚雄;刘洋;王涛;卢勇涛;李浩源因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2007-12-18基金项目:新疆兵团科技服务资助项目(kjk fyzh2007-kjfw03)作者简介:刘 磊(1981-),男,工学硕士研究生,专业方向为农机化工程;e -mail:liuleixiaox iaohu@.通讯作者:陈永成(1957-),男,教授,从事农业机械化研究;e -mail:yongchengchen@.第26卷 第4期2008年8月石河子大学学报(自然科学版)Journal of Shihezi University(Natural Science)Vol.26 No.4Aug.2008文章编号:1007-7383(2008)04-0504-03吊篮式移栽机栽植器运动参数的研究刘 磊,陈永成,毕新胜,张 茜(石河子大学机械电气工程学院,新疆石河子832003)摘要:为了给栽植器结构设计的改进提供理论依据,本文对吊篮式移栽机栽植器的运动参数进行了研究,由吊篮式移栽机的运动轨迹建立了栽植器的运动方程,根据 特征参数 >1时是栽植器正常工作的必要条件 这一经典理论,确立了移栽机在栽植过程中的技术要求和结构参数,建立了二者之间的内在联系,以更好地满足移栽机的农艺要求。
关键词:移栽机;栽植器;运动特征;物理参数中图分类号:S223.92 文献标识码:A20世纪30年代,国外发达国家就出现手工喂苗的栽植机具,50年代研制出多种不同结构形式的半自动移栽机和简易制钵机。
70年代末,B K Huang 等发明了适合自动移栽的空气整根育苗技术,并以此为基础提出了钵苗移栽的系统方案,并设计了精密苗盘播种机和自动移栽机。
这种移栽机能移栽多种农作物,通用性好,缺点是体积大,成本高[1]。
到80年代,半自动移栽机已在生产中广泛使用,制钵机已形成系列。
80年代初美国出现了自动移栽机,H L Bre wer 等经过多年研究、改进,设计出箱式移栽机。
目前,一些发达的国家已实现甜菜、玉米、蔬菜和烟草等旱地作物的育苗工厂化和移栽机械化。
我国在20世纪70年代开始研制裸根苗移栽机,80年代研制成半自动蔬菜移栽机,但由于育苗技术落后,配套性能差,综合效益低等原因都未得到应用推广。
近几年来,随着育苗技术的发展以及劳动力成本的上升,推动了栽植机械的研制开发工作,又出现了新的栽植机械。
我国研制和正在使用的半自动移栽机主要有:钳夹式移栽机、链夹式移栽机、吊蓝式移栽机、导苗管式移栽机、带式移栽机等。
近几年,在引进美国、法国、日本、意大利等国移栽机的试验基础上,先后研制出一批钵苗移栽和制钵机具,在内地一些省区试验和使用。
从总体上讲,目前我国研制使用的移栽机械尚存在品种单一,规格不全,结果复杂,成本高,农机农艺脱节,不能满足多种栽植作业等问题,尤其是移栽质量不稳定,没有扶苗装置的移栽机,秧苗的直立度、株距、深度等都不能完全达到农业技术要求。
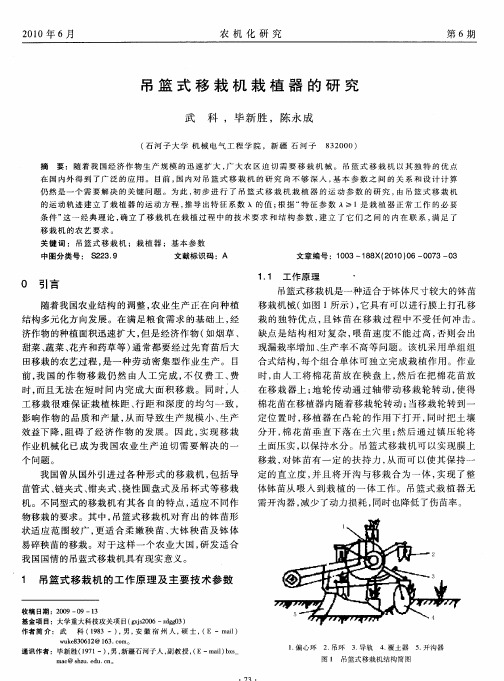
1 吊篮式移栽机栽植器的工作原理及技术参数1.1 工作原理吊蓝式移栽机是一种适合于钵体尺寸较大的钵苗移栽机械,它具有可以进行膜上打孔移栽的独特优点,其工作过程如图1所示。
该机作业时,人工将棉花苗放在秧盘上,然后再把棉花苗放在移栽器吊篮上,栽植器的结构如图2、图3所示。
地轮传动通过轴带动移栽轮转动,使棉花苗在移植器内随着移栽轮转动,当移栽轮转到一定位置时,栽植器在凸轮的作用下打开,同时把土壤分开,棉花苗垂直下落在土穴里。
然后通过镇压轮将土面压实,以保持水分。
吊篮式移栽机可以实现膜上移栽,对钵苗有一定的扶持力,从而可以使其保持一定的直力度,并且将开沟与移栽合为一体,实现了整体钵苗从喂入到栽植的一体工作。
吊篮式栽植器未设计开沟器,这样既减少动力损耗,又降低了伤苗率。
栽植器的主要部件包括吊杯、套筒、圆盘等。
吊杯要求表面光滑,以减小其与土壤的粘着力;其下端成圆锥形,便与入土;吊杯外壳铰接在吊杯上,并可绕其交接轴转动。
当吊杯旋转到一定的角度时,与凸轮接触,并在凸轮的推动下绕其交接点转动,同时吊杯张开。
当吊杯绕过最下点的时候,吊杯与凸轮分离,此时吊杯在弹簧的作用下闭合。
凸轮主要有二个作用:第一,在圆盘的转动过程中控制吊杯外壳的张合;第二,将各个套筒固定在原盘上,起固定作用。
1:栽植圆盘;2:偏心圆盘;3:偏心圆盘导轨;4:吊篮;5:曲柄;6:凸轮图1 田间工作的吊篮移栽机图2 栽植器结构示意图图3 吊篮1.2 主要的技术参数型号:2ZM -2;工作方式:单独独立式;挂接方式:拖拉机后悬挂;配套动力:铁牛55;传动装置的形式:地轮传动,链轮+链传动;作业行数:2行;株距20cm 左右,可调;行距60cm 左右,可调;移栽深度10c m,可调;株距变异系数<1%,漏播率<2%,移栽合格率>98%,伤苗率<3%。
2 吊篮式移栽机栽植器的运动特征2.1 移栽机传动其传动示意图见图4。
地轮在地面上向前行走时,通过连轴器将其转动传到链轮上,再经过传动链传到方轴上,方轴上的链轮又经过传动链把地轮的动力传给栽植器上,驱动栽植器转动进行工作。
1:地轮;2:链轮;3:栽植器;4:传动链;5:连轴器;6:传动链;7:方轴图4 传动示意图2.2 栽植器的运动方程吊杯的运动轨迹如图5所示。
图5 吊杯的运动轨迹示意图吊杯的绝对运动是由机组的前进运动和圆盘相对于机组的圆周运动的的复合运动,所以吊杯的运动轨迹方程[2]为:x =v t +R cos( t),(1)y =H -R sin ( t)。
(2)将式(1)、(2)对时间进行一阶求导,即可得到吊杯的运动方程:v x =v -R sin ( t),(3)v y =-R sin ( t)。
(4)式(1)~(4)中,v 为机组的前进速度; 为吊篮的转动角速度;H 为吊篮的转轴距沟底的距离;R 为吊篮的转动半径。
令 =R v ,则吊篮的运动轨迹取决于 值的大小,吊篮的运动轨迹图6所示[3],曲线上点的切线方向就是吊篮绝对速度的方向。
图6 吊篮的运动轨迹示意图505第4期 刘 磊,等:吊篮式移栽机栽植器运动参数的研究按照 零速投苗[4] 原理,只有 1时,余摆线形成扣环才能实现零速投苗。
3 主要特征参数的选择及其关系3.1 吊篮式移栽机的特征参数设计中选取的主要特征参数[5,6]为:1)栽植频率f ;2)栽植株距S ;3)机组速度v;4)吊篮数量N;5)吊篮转动速度n;6)吊篮转动半径R;7)驱动轮半径R 动;8)驱动轮转动速度n 动;9)传动比i;10)滑移率 。
3.2 主要特征参数之间的关系1)吊篮转动速度、吊篮转动半径、驱动轮半径、动驱动轮转动速度和传动比与滑移率的关系:N =i R 动 n 动R (1- )。
试验结果表明[7],转速为12.52r/min~13.09r/min 时可以满足零速投苗,并且钵苗直立度良好,栽植器转速过高或过低将导致钵苗后倾,倒伏率上升。
2)栽植频率f 、栽植株距S 与机组前进速度v的关系为:v =60 f S 。
一般只有1个或2个吊篮能同时喂苗,因此栽植频率f 一般不超过30株/min 。
3)吊篮数量N 、吊篮转动半径R 、栽植株距S 的关系。
栽植株距要大于2个吊篮之间的弧线,则S >2 R N ,即N <2 R S ;或者把 = f 30N,v =60 fS 代入 =Rv >1得R f 30N f60S >1;故吊篮的数量应满足:N <2 RS 。
当吊篮转动半径不变时,吊篮数量与株距成反比。
由于结构的限制,吊篮数量不能太多,一般不超过6个。
吊篮转动半径也不能太大,因此通过改变吊篮数量来调节株距存在一定困难,必须结合改变传动比来调节株距。
4)吊篮数量与吊篮转速的关系为:f =N n =N30 ,即 = f30N。
在栽植频率一定的情况下吊篮数量与吊篮转速成反比。
5)驱动轮半径R 动、栽植株距S 、传动比i 的关系为:i =盘 动=2 R 动NS ,即S =2 R 动Ni。
此式表明改变传动比可以调节株距。
4 小结目前,国内的吊篮式移栽机主要以人工喂苗为主,在田间作业时不能很好满足农艺的要求。
通过对吊篮式移栽机栽植器运动参数的研究,能使吊篮式移栽机从结构参数和技术要求的设计上都满足移栽的要求。
参考文献:[1]李其昀.机械化育苗移栽的现状与展望[J].农机化研究,2006,(3):26-27.[2]哈尔滨工业大学理论力学教研室.理论力学[M ].北京:高等教育出版社,2002.[3]李其均,鲁善文,杨宪武.吊篮式棉花移栽机的研究[J].农机化研究,2006,(4):164-166.[4]安凤平.2ZY -40型吊篮式钵苗栽植机的研究[J].现代化农业,1999,(2):31-32.[5]李宝筏.农业机械学[M].北京:中国农业出版社,2003.[6]中国农业机械化科学研究院.农业机械设计手册(上册)[M ].北京:机械工业出版社,1988.[7]封 俊,秦 贵,宋卫堂,等.移栽机的吊杯运动分析与设计准则[J].农业机械学报,2002,(5):48-50.Reserch on the 2ZM -2Transplanting Machine with the NacelleLIU Lei,CHEN Yong -cheng,BI Xins -heng,Z HANG Qian(College of Mechanical and Electronic Engineeri ng ,Shihezi University,Shihezi,Xinjiang 832003,China)Abstract:To improve the design of the structure and provide theoretical requirements,this paper initialiy studies the pa -rameters of planting movement.The equations of planting motion is based on baske-t transplanting machine teajec tory.Ac -cording to the classical theory the characteristic parameter >1planting is necessary for the normal working conditions ,it establishea the technical requirements and structural para meters and founds the intrinsic link in them to meet the re -quirements of the agronomic require ments.Key words:transplanting machine;mction sports feature;physical parameters506石河子大学学报(自然科学版) 第26卷。