多功能电动轮椅控制系统的研究
智能轮椅运动控制系统开发
智能轮椅运动控制系统开发
随着人口老龄化趋势的加剧,智能轮椅作为重要的辅助设备,逐渐成为解决老年人和残障人士出行难题的重要工具。
智能轮椅运动控制系统的开发,将为用户提供更舒适、安全、便捷的出行体验。
智能轮椅运动控制系统的核心是通过智能化技术实现对轮椅的自动导航和运动控制。
该系统采用传感器、摄像头、定位系统等多种技术手段,实时感知周围环境和用户的需求,从而智能地规划轮椅的运动路径和速度。
在轮椅的自动导航方面,智能轮椅运动控制系统能够通过激光雷达、红外线传感器等装置,实时监测周围障碍物的位置和距离,并基于这些信息进行路径规划。
当轮椅接近障碍物时,系统能够自动减速或停止,以确保用户的安全。
此外,智能轮椅运动控制系统还具备用户体征检测和智能识别功能。
通过心率、体温、呼吸等生理参数的监测,系统能够准确判断用户的健康状况,并根据用户的需求和能力调整轮椅的运动方式。
同时,系统还能通过人脸识别、语音识别等技术,实现与用户的智能交互,提供个性化的服务。
为了确保智能轮椅运动控制系统的稳定性和可靠性,开发团队还需要对系统进行全面的测试和优化。
在测试阶段,团队将通过模拟不同场景和情况,对系统的各项功能进行评估和验证。
同
时,团队还将持续收集用户反馈和意见,不断改进系统的性能和用户体验。
总之,智能轮椅运动控制系统的开发将为老年人和残障人士带来巨大的福利。
它不仅能够提供更加智能化的导航和运动控制功能,还能通过用户体征检测和智能识别,为用户提供个性化的服务。
未来,随着技术的进一步发展和创新,智能轮椅运动控制系统将不断完善,为用户提供更加便捷、安全、舒适的出行体验。
全方位运动电动轮椅的系统设计与研制的开题报告

全方位运动电动轮椅的系统设计与研制的开题报告1. 研究背景随着人口老龄化的加剧,越来越多的人需要依靠轮椅进行日常活动。
同时,随着科技的发展,电动轮椅已经成为很多人的首选,因为它能够提供更多的舒适性和便利性。
然而,传统的电动轮椅存在着很多局限性,如不能很好地适应不同的地形和环境,不能够满足人们良好的运动需求等。
因此,开发一款全方位运动电动轮椅,将成为未来轮椅行业的一个重要方向。
2. 研究目的本项目旨在设计和研制一款全方位运动电动轮椅系统,能够实现自主导航、多种运动模式切换、行走方向控制、触摸式界面操作等功能,以满足不同人群的需求,提供更加便利的出行方式。
3. 研究内容和方案本项目主要涉及到以下方面的内容:3.1 系统设计本项目将采用全方位轮式底盘结构,结合先进的导航技术和传感器控制系统,实现自主导航和行走方向控制;同时,集成多种运动模式,如直线行驶、曲线行驶、旋转、爬坡等,以满足不同行驶需求。
此外,还将配备触摸式界面,方便用户进行操作和交互。
3.2 控制系统设计本项目将设计一种基于ARM处理器的嵌入式控制系统,包括传感器采集和控制指令处理。
传感器部分包括超声波模块、惯性导航模块、视觉传感模块等,以实现自主导航和行走方向控制;控制指令部分则包括运动模式切换、速度控制、转向等,以实现多种运动模式和用户需求的个性化定制。
3.3 轮椅结构设计本项目将设计一个轻量化、紧凑型的轮椅结构,采用铝合金框架和优质材料,同时考虑到轮椅的稳定性和安全性,进行多次模拟实验和优化设计。
4. 预期效果和意义本项目将能够实现以下预期效果:4.1 实现全方位运动功能,具有更好的适应性和灵活性。
4.2 实现自主导航和行走方向控制功能,提高行驶的安全性和自主性。
4.3 实现多种运动模式切换,满足不同人群的需求,提供更加舒适的出行体验。
4.4 配备触摸式界面,方便用户进行操作和交互。
5. 研究计划与进度安排本项目计划于2022年1月启动,并分为以下阶段进行:1)需求分析与系统设计阶段:2022年1月至2月;2)控制系统设计与开发阶段:2022年3月至4月;3)轮椅结构设计与优化阶段:2022年5月至6月;4)系统集成与测试阶段:2022年7月至8月;5)技术报告撰写与完善阶段:2022年9月至10月。
基于电动轮椅车动力转向的智能操控系统设计
基于电动轮椅车动力转向的智能操控系统设计电动轮椅车是一种为行动不便的人士提供移动便利的工具。
为了提高电动轮椅车的操控性能和用户体验,智能操控系统的设计变得尤为关键。
本文将讨论基于电动轮椅车动力转向的智能操控系统的设计原理和功能。
一、系统设计原理1. 动力转向技术电动轮椅车动力转向指的是通过改变不同轮子上的驱动力矢量,实现转向效果。
在传统的电动轮椅车设计中,通常通过电机控制前轮的转向。
然而,这种方式可能导致转向灵活性不足和操控困难。
因此,基于电动轮椅车动力转向的智能操控系统设计应采用更加先进的技术。
2. 转向算法智能操控系统设计中的关键是开发高效、精确的转向算法。
这些算法可根据电动轮椅车的速度、转弯半径和用户输入等信息,实时计算出最佳的转向方案。
例如,可以基于模糊逻辑控制(Fuzzy Logic Control)或者模型预测控制(Model Predictive Control)等方法来实现转向算法。
二、系统设计功能1. 自适应转向基于电动轮椅车动力转向的智能操控系统设计应具备自适应转向功能。
这意味着系统能够根据不同的操控需求和环境条件,自动调整转向方案。
例如,在行驶速度较低时,系统可使电动轮椅车具备更小的转向半径,以便在狭小空间内转弯;而在高速行驶时,则可使电动轮椅车转向更加稳定。
2. 防抱死制动系统(ABS)为了提高安全性能,智能操控系统设计还应包括防抱死制动系统(ABS)。
ABS能够通过减少或控制刹车力度,防止车轮在制动时锁死,从而提高制动稳定性和操控性。
3. 曲线行驶辅助基于电动轮椅车动力转向的智能操控系统设计还应具备曲线行驶辅助功能。
该功能可以通过优化电池电量分配和转向角度控制,帮助电动轮椅车在弯道上更加平稳地行驶,并减少滑动和漂移现象。
4. 避障功能为了提高安全性和用户体验,智能操控系统设计可能还包括避障功能。
该功能利用传感器和算法来监测周围环境中的障碍物,并自动调整行驶方向,以避免碰撞。
新型多功能电动轮椅的研究和CAD设计
电 动 轮 椅 的蓄 电池 是 与一 般 蓄 电池 不 同 ,它 是 以 较 长或以大电流放 电 ( 于启动 、加 用 速或爬 坡 ) 。轮椅对 电池的基本 要求可 以归纳为 以下几点 :高
能量 密度 ;高 功率 密度 ;较长 的循环 寿命 ;较好 的充 放 电性 能 :价格较低 ;使用维护方便等等 E。综上 所述 ,将 采用 目前 6 -
展都经历 了南重型到轻型 、单一功能到 多功能 、手动到 电动的
2 材 料 与方 法
21 新 型 多 功能 电动 轮 椅 现 状 与 发 展 趋 势 .
阶段 ,轮椅行业 开始 向现代高科技方向进发。
现在市场上轮椅的品牌也越来越 多 ,从 国外著名 的珠 穆琅
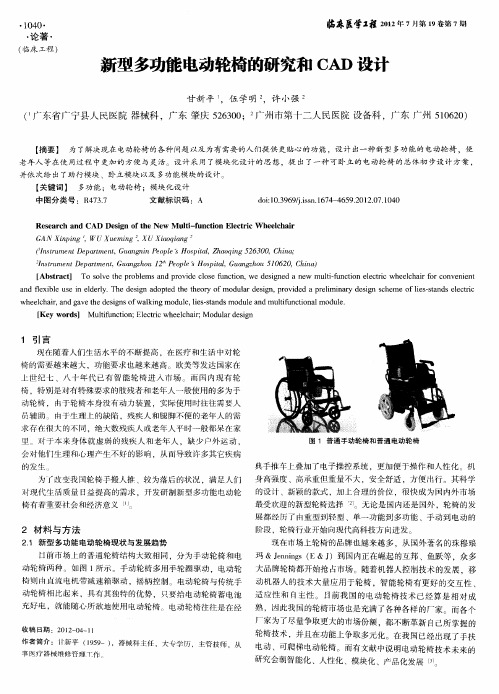
目前市 场上 的普 通轮椅结构大致相同 ,分为手动轮椅 和电 玛 &J n g E&J e i s( nn )到国内正在崛起的互邦 、 鱼跃等.众多 动 轮椅 两种 。如 图 1 所示 。手动轮椅多用手轮 圈驱动 ,电动轮 大 品牌轮椅都开 始抢 占 市场 。随着 机器 人控制技术 的发展 ,移 椅 抛 南直流 电机带减速箱驱动 ,摇柄控制 。电动轮椅 与传统手 动机 器人 的技术 大量应用 于轮椅 ,智 能轮椅有更 好的交互 性 0
【 sr c】 Tos letepo lmsa dpo ieco efn t n wed s n d an w l— n t nee t cwh ec arfrc n e in Ab ta t ov h rbe n r vd ls u ci , ei e e mut f ci lcr e lh i o o v ne t o g i u o i
、
动 轮椅 相 比 起 来 ,具 有 其 独 特 的优 势 , 只要 给 电动 轮 椅 蓄 电池 适应 性 和 自主性 。 目前我 国的 电动轮椅 技术 已经算 是 相对 成 充 好 电 ,就 能 随 心所 欲 地 使 用 电动 轮 椅 电动 轮 椅 往 往 是 在 经 熟 ,凶此我 国的轮椅市场也是充满 了各种各样 的厂家 而各 个
电动轮椅车动力转向的智能化控制系统设计
电动轮椅车动力转向的智能化控制系统设计随着人口老龄化程度不断加深,电动轮椅车作为一种重要的辅助交通工具,为行动不便的人提供了更多的自由和独立性。
为确保电动轮椅车的稳定性和操控性能,设计一个智能化的控制系统变得尤为重要。
本文将探讨电动轮椅车动力转向的智能化控制系统设计,并详细阐述其实施方案和设计要点。
一、引言电动轮椅车的动力转向控制系统的设计目标是提高操控性能,提供更好的用户体验。
该系统需要结合传感器技术、电机技术和控制算法来实现智能化控制。
本文将从这三个方面详细阐述电动轮椅车动力转向的智能化控制系统设计。
二、传感器技术在智能化控制系统设计中的应用传感器技术在电动轮椅车动力转向的智能化控制系统设计中起着关键作用。
通过安装合适的传感器,可以实时获取车辆运行的信息和环境数据,从而提供给控制系统,以实现动力转向的智能化控制。
常用的传感器包括速度传感器、角度传感器和力传感器。
速度传感器主要用于测量车辆的速度信息,可以帮助控制系统根据车速进行精准的控制。
角度传感器用于测量转向轮的转角,以便控制系统能准确判断转向的情况。
力传感器用于测量转向力的大小,从而实现动力转向的精确控制。
传感器技术不仅使得控制系统能够实时获取车辆信息,还可以通过传感器的数据判断车辆是否处于危险状态,如过度倾斜、碰撞等情况,从而及时采取相应的控制措施,保证安全性。
三、电机技术在智能化控制系统设计中的应用电动轮椅车的动力转向主要依靠电机系统实现。
为了实现精确控制和高效能的动力转向,需要选用合适的电机并配备相应的控制设备。
在电机选择方面,应考虑功率、转速、扭矩和效率等因素。
根据实际需求,选用合适的电机类型,如直流电机、无刷直流电机或步进电机,并结合控制系统,实现精确的动力转向控制。
控制设备主要包括电机控制器和电池管理系统。
电机控制器负责接收传感器的数据,并根据需要控制电机的转向和转速。
电池管理系统则负责监测电池的电量,以便及时调整电源输出,确保电动轮椅车的稳定运行。
一种多功能智能轮椅的控制系统设计

关键词
下肢康复训练 ; 智能家居 ; 语音识别 ; 多功能智能轮椅
文献标 识码 : B 文章编号 : 1 0 0 1 1 2 4 2 ( 2 0 1 6 ) 一 1 1 - 1 2 4 6 — 0 0 4
目( 1 5 Dz 1 9 4 1 9 0 2 )
1 上海理工大学 医疗器械与食品学院康复工程与技术研究所 , 上海康复器械工程技术研究 中心 , 2 0 0 0 9 3 ;2 通讯作者
作者简介 : 胡杰 , 男, 硕士研究生 ;收稿 日 期: 2 0 1 5 — 0 7 — 0 2
】 2 4 6 WWW. r e h a b i . C O m . c r t
C h i n e s e J o u r n a l o f R e h a b i l i t a t i o n Me d i c i n e ,N o v .2 0 1 6 , V o 1 . 3 1 ,N o . 1 1
・
康复 工程 ・
一
种多功能智能轮椅 的控制 系统设 计
通 电动轮椅基本的代步行驶功能 ; ②接收控制指令精确地控
D OI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 ・ 1 2 4 2 . 2 0 l 6 . 1 1 . 0 1 4
+ 基金项 目: 上海市产学研医项 目资助 ( 1 2 D Z 1 9 4 1 0 0 3 ;1 2 D Z 1 9 4 1 0 0 4 ) ; 上海工程技术研究中心项 目资助( 1 5 D Z 2 2 5 1 7 0 0 ) ; 上海科委 产学研 医项
电动轮椅智能导航与控制系统设计与实现
电动轮椅智能导航与控制系统设计与实现近年来,随着人口老龄化的加速和残疾人群体的增加,电动轮椅成为了一种非常重要的辅助工具。
然而,传统的手动操控方式对于某些残障人士来说可能存在困难。
因此,设计一种智能导航与控制系统,为电动轮椅用户提供更加便利和安全的用户体验,已经成为了一个非常重要的问题。
本文将从需求分析、系统设计和实现三个方面,详细介绍电动轮椅智能导航与控制系统的设计与实现。
首先,在需求分析阶段,我们需要了解用户的需求和使用场景,以此为基础进行系统设计和实现。
电动轮椅的智能导航功能是本系统的核心部分。
用户需要提供目的地信息,系统则会通过内置的地图数据和导航算法,规划最佳路径并实时指导用户前往目的地。
同时,系统应当考虑到使用场景的多样性,包括室内和室外环境,具备适应不同环境的导航算法和传感器。
其次,在系统设计阶段,我们需要确定系统的整体架构和各个模块之间的接口。
为了实现智能导航功能,系统需要包括硬件和软件两个方面的设计。
在硬件设计方面,我们需要选择合适的定位传感器、导航模块以及控制器。
其中,定位传感器可以采用GPS、惯性导航传感器等来实现定位和导航功能;导航模块需要包括地图数据的存储与更新、路径规划算法和导航指令的生成等功能;控制器则负责接收用户的输入信息并控制电动轮椅的运动。
在软件设计方面,我们需要开发用户界面、路径规划算法和导航指令生成算法。
用户界面应当简单直观,方便用户提供目的地信息和接收导航指令;路径规划算法需要考虑到多种因素,如道路状况、交通流量和导航优先级等;导航指令生成算法需要将规划得到的路径转化为易于理解和执行的指令,如语音提示或屏幕显示。
最后,在系统实现阶段,我们需要将系统设计的各个模块进行具体的实现和集成。
在实现过程中,要注意观察和测试系统的性能,及时发现和解决问题,保证系统的稳定与可靠性。
在技术实现方面,可以利用现有的智能手机和互联网技术,通过连接智能手机和电动轮椅来实现导航和控制功能。
一种全新的多功能智能电动轮椅系统设计
一种全新的多功能智能电动轮椅系统设计刘薇摘要:给出了一种具有基本行走移动、健康监护、多媒体、休闲娱乐、安全避障、导航定位等多功能的全新的智能电动轮椅设计方法,可极大拓展老、伤残人士社会交流的深度和广度,对我国智慧型养老社会的实现具有重要意义。
关键词:智能;电动轮椅;智慧养老;多功能;系统设计: TP249 : A :1009-3044(2017)36-0155-02Abstract: Proposed a new design method of intelligent electric wheelchair with multifunction of basic walking movement, health monitoring, multimedia, entertainment, safe obstacle avoidance,navigation and positioning, etc. it can greatly expand the depth and scope of social communication of the old and disabled people, and ithas important significance for the realization of intelligent endowment society in our country.Key words:Intelligence; Electric wheelchairs; A wise old age;Multifunction system design智能轮椅是将智能机器人技术应用于电动轮椅,融合多种领域技术,包括机器视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,涉及机械、控制、传感器、人工智能等技术,具有自主导航、避障、人机对话以及提供特种服务等多种功能的一种服务型机器人。
智能轮椅的研究现状与趋势
,
在门
-
、
走 廊 等狭 窄 区 域
根 据使用 者
( 下 转第 3 3 页 )
2 0 0 8 12 2 0
,
作 者 简介 : 原 魁
6
研究 员
,
博士生导 师
,
高技 术 创新 中 心 副 主任
V 0 1 15 N o 1
. .
中 《 国 医 疗 器 械 信 息 》2 0 0 9 年 第 1 5 卷 第 1 期
,
相 当于 使 用 普 通 的 电 动 轮椅
不 但 可 以 为 老 年 人 和 残 疾人 提 供 而 且 可 以 具 有 自主 导 航
、
种 良好 的代 步 工 具
、
,
对 于 高 性 能 智 能 轮 椅来 说
一
,
因 为其控 制系
,
自主 避 障
,
人 机 对话 等服务
统 的核心 通 常也 是
台具 有 较 高 性 能 的 计 算 机 系 统
,
安装
,
的指 令 通 过 自身 获 得 的 环 境 信 息 自主 完 成 到 目标 点 的
多种 人 机 接 口
,
从 而 能 与使 用 者 实 现 多种 途 径 的 交 互
。
路径 规 划 和 移 动
,
比如 到 卧室
,
客厅
,
厨房
,
等等
。
提供 更 加 安 全 的运 动控 制
另外
,
自主 模 式 主 要 针 对 对 电 动 轮 椅 控 制 能力 较 弱 的 老 年 人
和 残疾 人
,
针 对 残 疾 程 度 较 重 的使 用 者
,
,
电动轮椅运动控制系统设计【控制理论与控制工程专业优秀论文】

电动轮椅是一种以蓄电池为能源、电机驱动的轮椅车。具有省力、操作简便、 车速平稳、无污染和低噪音的特点。适于下肢残疾、高位截瘫或偏瘫以及年老体弱 者使用,是一种比较理想的移动或代步工具。
目前,国外对电动轮椅的研究已相对比较成熟。他们已开发出各种各样的适合 不同用户群体的电动轮椅,并逐渐向智能化的方向发展。现在高性能电动轮椅生产 厂家多集中在美国、德国、澳大利亚和西班牙,中国台湾也有电动轮椅生产厂家。 然而,国内对电动轮椅的研究技术依然远远落后于国外,绝大多数轮椅厂家都只生 产电机和座椅而不生产控制器,基本上都依赖于进口。因此,研究高性能低成本的 电动轮椅驱动器,替代进口填补国内技术空白具有重要意义。
1
能对于那些非常熟练的用户或在干燥、比较平整和在没有障碍的路面上驾驶的一般
熟练用户来说可能足够了,但是对于大多数在户外驾驶轮椅的用户而言依然存在一
定的困难,特别是在天气比较恶劣,路面不平或者上下坡的场合有更大的难度。在
家里驾驶轮椅,对于身体严重残疾或具有精神障碍的人而言依然是个挑战。所以,
研究性能更完善的电动轮椅控制器具有重要意义。
The author investigated plenty of literatures on the topic, summarized current EPWs research technology and present research status of EPWs. An all-digital EPW controller based on TMS320LF2406A digital signal processor (DSP) is developed in the thesis. Technique specification of EPW is analyzed in details. A two-motor coordinated control scheme which takes motor voltage as negative feedback with motor current compensation and unbalanced load compensation is designed in the thesis. Firmware architecture, cell circuits and parameter preferences methodology are represented. After analyzing the principle of Joystick operation, formulas of the EPW’s speed and direction given value composition are proposed. A strategy of generating S curve is designed for improving user
电动轮椅车动力转向的智能语音控制系统研究
电动轮椅车动力转向的智能语音控制系统研究电动轮椅车作为一种重要的辅助工具,为行动不便的人群带来了巨大的便利。
随着科技的不断进步和人们对智能化的需求,研究和开发电动轮椅车的智能语音控制系统已成为一个热门的领域。
本文将对电动轮椅车动力转向的智能语音控制系统进行研究,探讨其设计原理和实现方法。
首先,我们需要了解电动轮椅车动力转向的基本原理。
电动轮椅车通常由电机、电池、控制器和转向系统等组成。
其中,动力转向是使车辆能够在不改变车辆速度的情况下改变行驶方向的关键。
传统的动力转向通常依赖于手动控制或遥控器,但这些方式对于行动不便的用户来说可能并不便利。
因此,研究和开发一种基于智能语音识别的动力转向系统显得尤为重要。
在设计智能语音控制系统之前,我们需要解决两个重要的问题:语音控制的准确度和语音识别的实时性。
首先,提高语音控制的准确度是保证系统稳定运行的关键。
为了实现这一目标,我们可以采用以下几种方法。
首先,设计一个高质量的麦克风阵列以确保语音信号的清晰度和准确度。
其次,使用先进的语音识别算法来提高系统对语音指令的识别准确度。
例如,可以使用深度学习算法或者基于神经网络的语音识别技术来提高语音指令的准确度。
此外,还可以设置一些语音指令的确认机制,以防止误操作和不必要的动力转向动作。
其次,语音识别的实时性是保证系统灵活性和用户体验的关键。
为了实现实时性,我们可以采取以下几种措施。
首先,优化系统硬件和软件的结构,提高语音识别系统的处理速度和响应时间。
其次,通过运用并行计算和分布式处理等技术,提高系统的计算能力和运算速度。
此外,还可以进行系统的实时性测试和优化,以确保系统能够在最短的时间内响应用户的指令。
在实现语音控制系统的基础上,还可以对其进行扩展和改进。
例如,可以增加一些语音交互的功能,使系统能够实现更加复杂的指令和回应。
此外,还可以将系统与其他智能设备和智能家居进行集成,实现更加便捷和智能化的控制方式。
在实际应用中,电动轮椅车动力转向的智能语音控制系统将为行动不便的用户带来诸多好处。
多功能智能电动轮椅系统设计
中国科技信息 2019 年第 12 期·CHINA SCIENCE AND TECHNOLOGY INFORMATION Jun.2019 DOI:10.3969/j.issn.1001- 8972.2019.12.028
可实现度
可替代度
行业曲线
link
appraisement
5. 出行管理功能:该功能主要指的是定位和导航功能,如 果使用者需要导航的时候,就可以通过专用 App 进行导航。并 且,触屏上配备了专用的 GPS 定位器,家属可以通过 APP 查 看轮椅的实际位置,尽可能保障轮椅使用者的出行安全。
新型智能轮椅主要机构介绍
1. 在设计智能轮椅结构的时候,主要对以下几点加强了 重视:
3. 安全管理功能:在轮椅前后都安装了机械防撞杆,确 保使用轮椅的时候不会受到碰撞。而且,轮椅采取安全避障 的措施,还能够有效规避前方的障碍物。在设计电池的时候, 充分考虑到了过流保护、短路保护以及过充保护,使供电安 全大大提升。如果轮椅出现异常为的时候,就会第一时间发 出警报,从而采取针对性的措施进行处理,同时也会利用无 线信号把危险信号发送给轮椅使用者家人或附近社区医院。
indu:内蒙古工业大学科学研究项目(ZY201819)
影响力
真实度
行业关联度
李冬梅 多功能智能电动轮椅系统设计
随着科学技术的进步,对人们的生产生活带来了极大的便利,尤其 是对于医疗行业来说,具有非常重要的实践意义。在目前的医疗领域中, 移动机器人是非常重要的组成部分,而智能电动轮椅的应用对于学术行 业及社会来说都具有非常重要的意义。随着我国老龄化进程的加快以及 意外情况发生率的提升,每年发生的致残人数呈现递增的趋势,这对整 个社会的稳定发展有很大的影响。而智能电动轮椅属于目前一款运行可 靠、功能完善的重要工具,能够帮助残疾人士及老年人的生活质量得以 提高,具有重要的实践意义。并且,智能电动轮椅融入了材料科学、机 械科学、信息科学、计算机、人工智能等多门学科,综合了当下非常先 进的技术,深层次多角度的研究多功能智能轮椅,不但可以使学科的纵 向深度得到加深,而且还能够融合多学科,具有重要的学术意义。
多功能智能轮椅设计-运动控制系统的设计与实现

多功能智能轮椅设计-运动控制系统的设计与实现多功能智能轮椅设计-运动控制系统的设计与实现v>多功能智能轮椅设计—运动控制系统的设计与实现多功能智能轮椅设计-运动控制系统的设计与实现摘要在现如今智能化高速发展的时代,智能、科技已然成为时代的主题之一,智能产品也被越来越多运用到各行业中。
而正是由于不断发展的科技,人们也越来越追求高智能化的产品。
基于为残障人士与老年人服务,本着操作简单,方便使用者的观念,这次的设计在现有轮椅的基础上优化了轮椅原有的设计,实现了轮椅的自主导航以及避障的功能,极大的方便了使用者的使用,同时也解决了这些人中大多数人都由于出行问题而无法体验到生活的乐趣,领略祖国美好河山的问题。
本设计采用 arduino 单片机 MEGA2560 作为控制的核心,通过摇杆模块、电机驱动模块、推杆模块、继电器模块等,实现了电机的正反转以及调速,同时利用电机的正反转实现轮椅整体的行进方向,以及对推杆电机的控制进而实现轮椅背部与脚架的角度控制,最终实现可让使用者根据自己需求选择自己舒服的角度。
全文讲述了个人设计智能轮椅的软件方案与硬件的电路设计控制实现的全部过程,包含各元器件选择、电气原理图设计、程序编写,硬件调试以及控制实现过程心得体会等。
关键词:智能轮椅;arduino 单片机;程序设计;Multi-functional intelligent wheelchair design - design and implementation of motion control system Abstract In today's era of rapid development of intelligence, intelligence, technology has become one of the themes of The Times, intelligent products have been increasingly used in various industries. And just because of the constant development of science and technology, people are also more and more in pursuit of high intelligent products. Based on the service for the disabled and the elderly, in line with simple operation, convenient user's concept, Based on the original design, the existing wheelchair was optimized, realized the wheelchair autonomous navigation and obstacle avoidance function, greatly convenient for the user's use, but also solved the problems of most of these people are due to travel to experience the fun of the life, appreciate the problem of the motherland beautiful country side. This design makes the arduino microcontroller MEGA2560 as control core,through the rocker arm module, motor driver module, a push rod module, relay module, realize the positive &negative and speed of the motor, at the same time using of the motor and reversing the wheelchair overall direction, and the push rod motor to realize the control of the wheelchair back and legs Angle control, finally realize can make users according to their own needs to choose their own comfortable angle. This paper describes the entire process of personal design of intelligent wheelchair software scheme and hardware circuit designand control, including the selection of components, electrical schematic design, programming, hardware debugging and control of the realization process experience. .Keywords: Intelligent wheelchair; Arduino microcontroller; Program design; 目录 1 绪论 1 1.1 研究的意义1 1.2 现今智能轮椅研究的现状 1 1.3 研究的基本思路与设计方案 2 2 安全性能要求以及电气控制原理 4 2.1 轮椅设计安全性能要求 4 2.2 智能轮椅的电气控制设计原理 5 3 硬件设计 8 3.1 直流电机模块 8 3.2 继电器模块 13 3.3 推杆电机模块 16 3.4 摇杆模块 18 4 软件设计 21 4.1 程序流程图 21 4.2 继电器模块程序设计 22 4.3 摇杆程序设计 23 4.4 直流电机控制程序设计 24 4.5推杆程序设计 28 5 软硬件的联合调试及效果验证 31 5.1 软硬件的联合调试31 5.2 软硬件的效果验证 33 6 结论与展望 37 参考文献 38 致谢 39 附录 40 附录 1 40 附录 2 41 附录 3 44 1 绪论 1.1 研究的意义智能轮椅的产生,是为了服务与行动不便的老年人和残障人士这一类群体。
动力轮椅车的智能化控制系统开发与应用

动力轮椅车的智能化控制系统开发与应用随着科技的不断进步,智能化控制系统的应用越来越广泛,包括了很多领域,其中之一就是动力轮椅车。
动力轮椅车的智能化控制系统的开发与应用,旨在为残疾人提供更加便捷、舒适和安全的交通工具。
本文将介绍该系统的开发原理、主要功能以及应用场景。
智能化控制系统的开发是一个复杂而严谨的过程,需要结合机器人技术、传感器技术和嵌入式系统等多个领域的知识。
首先,开发团队需要设计一个可靠的控制算法,以确保动力轮椅车的运动稳定性和安全性。
这需要对车辆动力系统进行建模,通过数学模型来描述车辆的运动特性,并利用传感器获取实时数据进行反馈控制。
另外,系统还需要具备自主避障和自动导航功能,以提供更加智能化的使用体验。
动力轮椅车的智能化控制系统具备多项主要功能。
首先,它可以根据用户的指令实现自主导航。
通过搭载GPS导航模块和惯性导航系统,系统可以获取当前位置和目标位置信息,进而规划最佳路径,并自动引导车辆前往目的地。
其次,该系统还可以实现智能避障功能。
通过激光雷达和摄像头等传感器,系统能够检测到前方的障碍物,并及时采取避让或刹车等措施,确保用户的安全。
此外,智能化控制系统还可以根据用户的需求,实现自动调节车辆速度和座椅角度等功能,以确保用户的舒适性和便捷性。
智能化控制系统的应用场景多种多样。
首先,它可以广泛应用于医疗机构和康复中心,为行动不便的患者提供便捷的交通工具。
通过智能化控制系统的帮助,患者可以自主前往医院或康复中心,减轻家庭成员的照顾压力。
另外,智能化控制系统也适用于老年人群体。
随着老龄化社会的到来,越来越多的老年人出行需求增加。
智能化控制系统可以根据老年人的健康状况和需求,提供个性化的交通解决方案,增加他们的生活质量。
此外,智能化的轮椅车还可以在公共场所和商业中心等场景中应用,提供给临时需要的人们快捷的出行方式。
当然,动力轮椅车的智能化控制系统的开发和应用也面临一些挑战。
首先,技术层面上存在一些难点,比如控制算法的设计和优化、传感器的准确性和可靠性等。
电动轮椅车动力转向的智能控制与自主导航技术
电动轮椅车动力转向的智能控制与自主导航技术随着科技的不断进步和人们对智能化生活的追求,电动轮椅车的智能控制和自主导航技术成为了研究的热点之一。
无论是为了提高老年人和残障人士的生活质量,还是为了满足日常生活中的便利性需求,电动轮椅车的动力转向的智能控制和自主导航技术都具有积极的意义。
电动轮椅车动力转向的智能控制是指通过电子系统和传感器实现对电动轮椅车的动力转向控制。
传统的手动轮椅车需要依靠使用者的手动操作来改变车辆的行进方向,但对于一些行动不便或残障的人来说,这种操作可能变得困难甚至不可能实施。
智能控制技术的发展给电动轮椅车的动力转向带来了新的可能性。
通过设计合理的动力转向系统,可以实现电动轮椅车的智能控制,从而使得行驶过程更加安全和便捷。
例如,可以采用电动助力转向系统,通过电机的工作来辅助转向,减轻使用者的操作力度。
同时,通过加装传感器和智能控制系统,可以实现对转向力度的精准调节,以适应不同使用者的需求。
自主导航技术是指电动轮椅车具备自主识别和规划行驶路径的能力。
传统的电动轮椅车需要由使用者操作来确定行驶的方向和路径,但在某些情况下,使用者可能无法清晰地判断,或无法给出明确的指令。
在这种情况下,自主导航技术可以发挥重要作用。
自主导航技术的核心是感知、决策和控制三个环节。
感知环节通过激光雷达、摄像头和超声波等传感器,实时获取周围环境的信息,并进行处理分析。
决策环节根据感知信息,采用算法确定最佳行进策略和路径规划。
控制环节通过对电动轮椅车的动力系统和转向系统进行控制,使其按照决策结果进行行驶。
为了实现电动轮椅车的自主导航,还需要结合地图数据和定位系统。
地图数据可以提供详细的道路和周边环境信息,作为自主导航的基础。
定位系统可以通过GPS、惯性传感器和编码器等技术来确定电动轮椅车的当前位置,从而进行准确的路径规划和行车控制。
动力转向的智能控制和自主导航技术的发展,不仅可以提升电动轮椅车的驾驶体验,还可以增加其安全性。
智能轮椅控制系统综述

智能轮椅控制系统综述智能轮椅控制系统综述战仁奎1,吴伟1,程桂娟2,于成龙1(1.沈阳工业大学电气工程学院运动控制研究所 110870;2.沈阳自动控制研究设计院 110016;)摘要:智能轮椅是将智能机器人技术应用于电动轮椅,融合多种领域的研究,包括机器人视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,涉及机械、控制、传感器、人工智能等技术。
本文将对智能轮椅控制系统的国内外研究现状进行总结,还对控制系统关键技术进行分析,并简单叙述未来的发展趋势。
关键词:智能轮椅;导航;定位;人机接口;0 引言联合国发表报告指出,在21世纪上半叶,老年人口将增加2.3倍,老年人口占总人口的比例将达到20%,全世界人口老龄化进程正在加快。
按照国际标准,沈阳市在上世纪90年代已经步入老龄化社会。
近年的统计资料表明,沈阳市全市常住总人口760万,其中,老年人口约123万,比重为15.8%,并且人口老龄化有日益加剧的趋势。
由于各种灾难和疾病造成的残障人士也逐年增加,他们存在不同程度的能力丧失,如行走、视力、动手及语言等。
为了给老年人和残障人士提供性能优越的代步工具,帮助他们提高行动自由度,让他们能加入到健全人的生活中去,重新融入社会,目前许多国家对智能轮椅进行了研究[1]。
1 智能轮椅控制系统国内外研究现状1.1国外研究现状世界上最早研究智能轮椅要追溯到1986年的英国,随后许多国家都投入重金研究智能轮椅,如法国V AHM项目、美国麻省理工学院Wheelesley项目、西班牙SIAMO项目、德国乌尔姆大学MAID项目等等。
由于各个实验室的目标及研究方法不同,每一种智能轮椅要解决的问题和实现的能力不同[2]。
智能轮椅初期的研究赋予的功能一般都是较低级控制,如简单的行进、速度控制及避障等。
随着机器人控制技术的发展,移动机器人技术大量应用于轮椅,智能轮椅在现实的基础上,具有更好的适应性、自主性、交互性。
麻省理工学院的智能轮椅WHEELESLEY,见图1,具有两种工作模式,手动模式和半自动模式。
电动轮椅操控技术的试验研究
Science &Technology Vision 科技视界0引言随着国民生活水平的提高,老年人的健康机械逐步由简易初级向人性化,机电一体化方向发展。
电动轮椅就是这样一个产物。
它在传统手动轮椅的基础上,增加动力驱动装置、操控装置、电池等部件组成。
电动轮椅非常适合行动不便的老年人和残疾人,电动轮椅因其操作简单方便正在逐步被广泛使用。
由于操控杆式控制方法非常符合使用者的主观感觉,大部分电动轮椅采用操控杆进行控制[1-2]。
然而,作为一个利用手臂进行操控的控制方式,对于手臂不够灵活的使用者,或者利用手臂实现其他操作的场合,操控杆就显得并不实用。
这就需要其他方式来代替操控杆,实现电动轮椅的控制。
目前较为常见的方式有声控、面部方向识别、脑电波以及身体动作方式[3]。
声控方式[4-6]需要用语言来控制设备,对发音的精准度有很高要求,操控系统需要熟悉使用者的发音习惯,对语言的精确识别和及时控制目前还有一定的困难。
面部识别方式[7-8]是以面部的方位进行识别,为配合传感器,使用者需要保持某种面部方向,对使用者形成心理负担。
脑电波方式[9-10]是未来控制领域的先进发展方向。
但是,由于技术尚处于起步阶段,很多内在规律的研究尚不完善,达到常规应用还需要较长的时间。
身体动作进行控制的方式[11-13]是,利用使用者身体的某种动作,针对轮椅进行移动方向和速度的控制。
该方式针对行动不便,手臂的控制能力不足,身体的整体尚可以进行重心移动的患者,或者身体健康,但是不方便使用手臂的用户实现短距离移动。
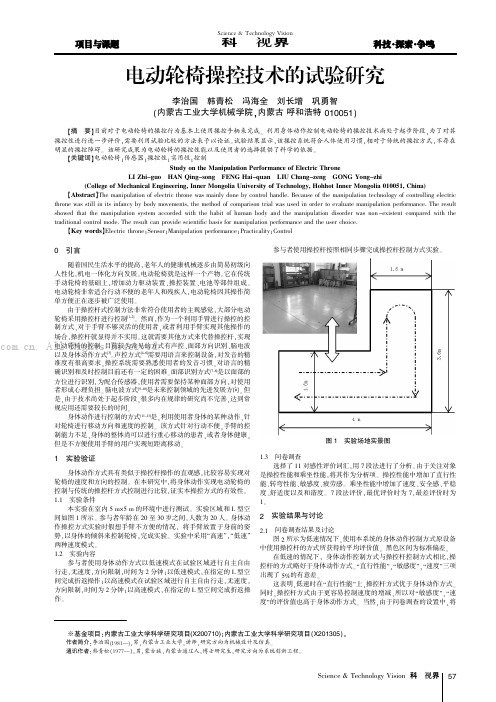
1实验验证身体动作方式具有类似于操控杆操作的直观感,比较容易实现对轮椅的速度和方向的控制。
在本研究中,将身体动作实现电动轮椅的控制与传统的操控杆方式控制进行比较,证实本操控方式的有效性。
1.1实验条件本实验在室内5m×5m 的环境中进行测试。
实验区域和L 型空间如图1所示。
参与者年龄在20至30岁之间,人数为20人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.2.
东北大学硕士学位论文
第二章电动轮椅的机械系统设计
第二章 电动轮椅的机械系统设计简介
现在市场上大多是手推轮椅,如图2.1所示。本文所设计的电动轮椅正是通过这种 轮椅改装而成。由于要增加动力驱动系统,故需对轮椅的机械结构进行重新设计。本章 将对轮椅的机械设计进行简要介绍。
2.1方案设计
图2.1手推轮椅 Fi晷2.1 The ordinary wheelchair
关键词:电动轮椅;单片机:遥控;语膏控制;肌电控制
ห้องสมุดไป่ตู้.Ⅱ-
东北是学硕士学位论文
Abstract
Research for the Control System of
Multifunctional Electric Wheelchair
Abstract
Nowadays,there are almost 200 million old people and other 80 million handicapped in our country.And among the old people,about 1 0 million of them have troubles in walking. besides that.500 thousand mof_e are injured by accident each year.There are so many people as mentioned,they need the a:ttention ofthe whole society,and especially,they need a kind o{- vehicle which could be really fit for them.Because the ordinary wheelchairs are not very convenient,you have to ask another person to help you ifyou want to use them,SO the electric wheelchairs are becoming more and more popular.
redesigned,double electromotor is applied in the individual control of the two rear wheels to achieve advance,reverse,swen,e and brake of the wheelchair.Secondly,in terms of the control system.the LMDl 8200 is applied to drive the motor and the speed could be regulated freely,besides that,the AT89C2051 is applied in keyboard control,remote apparatuses ia remote control,and LingYang 16-bit MCU in sound control,and at last the intramuscular
东北大学硕士荦位论文
多功能电动轮椅控制系统的研究
摘要
摘要
随着时代的发展,我国已经开始步入老龄化社会,现有老年人近2亿人,而残疾人 也超过8千万人。在老年人当中,将近有l千万人下肢行动不便,另外,每年新增因4:、 祸、工伤和其他意外下肢伤残者约50万人。这是一个宠大而特殊的群体,该群体是社 会的弱者,需要全社会的关爱,尤其需要一种适合他们心理和生理特征的交通:工具。由 于普通的轮椅需要他人从旁协助,势必给轮椅使用者造成诸多的不便,于是,电动轮椅 的发展越来越适合轮椅使用者在日常生活中的需要。
同时随着科学技术的进步和医疗条件的改善,人口老龄化趋势越来越严熏,中国老 年人口数量已超过1.3亿人,预计2044年将达到4亿人。老年人行走不便,也需要用 轮椅作为代步工具。
现在比较常见的代步工具一般是手推轮椅,这种轮椅需要他人紧随其后,随时照顾 和推动轮椅前进,这必然造成了诸多不便。很显然传统的手推轮椅已经满足不了人们的 需求。
因此,如何将电子和控制技术应用到轮椅的设计中,来扩大和提高广大残疾人的生 活空间和自由度已引起社会的广泛关注[1-2]。如今电动轮椅己进入了市场,它为几百万 下肢不便者提供了出行便利的选择。
在国外,电动轮椅的发展速度比较快,比如日本、美国等发达国家,已经出现了各 种功能的电动轮椅。
在国内,也已经有很多厂家生产电动轮椅,比如:深圳市健天逸电动轮椅制造公司、
1.2目标和任务
为了解决电动轮椅的上述不足,作者开始研究多功能电动轮椅。其中遥控足…大创 新点,它与手推轮椅相比较,可以适当解放他人的活动范围,如今遥控轮椅在市两上尚 未出现。
语音识别技术,已被公认为是2l世纪最有开发潜力和应用前景的高科技技术。现 在语音识别与控制技术已经在生活中有一定的应用,并且有不断扩大的趋势,但是在电 动轮椅产品中尚不多见。将语音识别技术融入电动轮椅中体现了轮椅的智能性,符合人
.1.
东北大学硕士学位论文
第一章绪论
工智能的发展方向。鉴于这种现状,本文在电动轮椅的语音控制上进行了…些尝试。 肌电控制技术,通过人体的肌肉电信号来做控制应该说在当前的控制领域还是比较
有发展潜力的。本文也尝试了将这一技术应用到电动轮椅上,并取得了初步成功。通过 手臂的弯曲动作或者手指的弯曲动作即可达到对轮椅的两个轮子的控制,进而完成轮椅 的各种动作。
然而目前市场上销售的电动轮椅大多都是价格不菲,最低档次的价格在人民币2-3 万元,高价的可达到12万元。并且这些轮椅都是以摇控杆控制,虽然这种控制方式比 较简单,但是却存在着弊病,手部功能以及上肢功能障碍者都无法顺利操纵使用。
因此,基于以上电动轮椅的诸多不足,本文设计了一套能够适合广大老年人及残疾 人使用的电动轮椅,使用者既可以通过用手按动键盘按键或遥控器按钮来控制轮椅,叉 可以通过使用语音或身体某一部分的肌肉电信号来控制轮椅。
虽然本文的研究还只是处于初级阶段。但作者相信将语音识别与肌电控制技术引入 到电动轮椅的控制上,不仅提高了电动轮椅的智能性,更重要的是通过电动轮椅这个高 科技平台来不断完善语音识别与肌电控制技术,尽可能地发挥出它们的潜力,为生产和 生活服务。
多功能电动轮椅的设计分为两个部分。首先是机械结构设计部分,这部分主要完成 的是对传统的手推轮椅的改造,包括车轮大小的确定、电机的选择、减速器的选择以及 对轴的设计等。其次是控制部分设计,在这一部分中主要完成的是轮椅的控制系统的设 计,包括按键控制和遥控这两项基本控制功能以及调速、按摩、语音控制和肌电控制这 些辅助功能的设计。在这里,作者的工作主要集中在电动轮椅的控制部分设计。
1.3本文结构
全文共由七章组成,其中: 第一章介绍了本文的工作背景和起因、电动轮椅的研究现状以及工作的主要内容。 第二章简要介绍了电动轮椅的机械结构组成,以及一些技术参数。 第三章详细介绍了该轮椅的控制系统设计。 第四章介绍了控制轮椅运动所需要的童流电机和H桥。 第五章介绍了电动轮椅的两项最为基本的功能,键盘控制和遥控。 第六章介绍了轮椅的一些辅助功能。如实现语音控制、肌电控制、调速和按摩功能。 第七章对本文作了详细的总结。
electric signal sampling and amplifying circuit could also be used to control the wheelchair.
Key words:Electric wheelchair;,MCU;Remote control;Voice control;
学位论文作者签名:加1矸 签字日期:o柙哆率7a舻曰
学位论文版权使用授权书
本学位论文作者和指导教师完全了解东北大学有关保留、使用学位论文的规定:即 学校有权保留并向国家有关部门或机构送交论文的复印件和磁盘,允许论文被查阅和借 阅。本人同意东北大学可以将学位论文的全部或郝分内容编入有关数据库进行检索、交 流。
Intramuscular electric signal contr01
.m.
独创性声明
本人声明所里交的学位论文是在导师的指导下完成的。论文中取得的研究成果除加 以标注和致谢的地方外,不包含其他人已经发表或撰写过的研究成果,也不包括本人为 获得其他学位而使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论 文中作了明确的说明并表示诚挚的谢意。
However,most ofthose electric wheelchairs on sale are very expensive.the price can be
ranked from 20-30 thousand minjmunl to 120 thousand ma)(imBln,and they are always controlled by rockers.But such kind of manipulation is really uncomfortable for the handicapped with injured hands or arms.
To settle the problems above,this thesis researches and develops a set of electric wheelchair system which could be controlled by keyboards,remote devices,human voice,and intramuscular electric signal.
图2.2基本架构
Fig.2.2 Basic structure ofthe wheelchair
-3。
东北大学硕士学位论文
第二章 电动轮椅的机械系统设计
根据手推轮椅的结构以及设计题目的要求,现有的手推轮椅结构以及轮椅的期望工 作场所、期望性能等前提,决定采用双电机后轮驱动,即由两个直流电动机分别驱动两 个后轮。这样使得轮椅的前进、后退、转弯控制方便灵活,当两个电机转向相反时,能 够实现极小的转弯半径,从而使得轮椅能够在狭小的室内灵活移动。这样,基于以上方 案的选择,设计的电动轮椅的基本框架如图2.2所示。