电流型PWM控制斜波补偿原理与系统的稳定
峰值电流控制模式中斜坡补偿的分析
峰值电流控制模式中斜坡补偿的分析
电流控制模式的斜坡补偿是一种重要的电力系统电流控制策略。
其主要目的是在瞬时负载变化的情况下,在预定的稳定时间内将负载的瞬时变化转换为一个平滑的频率变化,从而稳定系统电流。
斜坡补偿的任务实际上是确定合适的斜坡值,以确保系统电流在预定的时间内达到稳定状态,使系统峰值电流控制变得更加有效。
斜坡补偿对峰值电流控制的重要性可以从两个方面划分:
1. 斜坡补偿可以有效地减少系统电流的瞬时峰值,从而减少过载。
当控制斜坡来减少有载负载的瞬时电流峰值时,这种技术将大大有助于防止过载严重影响电力系统的安全和可靠性。
2. 斜坡补偿可以有效地减少发电机之间的不对称负载,从而消除失控和谐波等其他问题,从而维持电力系统的正常运行。
另外,使用斜坡补偿的另一个优点是可以减少静态补偿器的成本和复杂度,而静态补偿器的成本大大超出了它所带来的控制有效性和额外的谐波抑制能力。
因此,斜坡补偿是电力系统峰值电流控制的一个重要组成部分,可以有效地消除系统的过载、失控及其他负载问题。
峰值电流模控制中的斜坡补偿技术
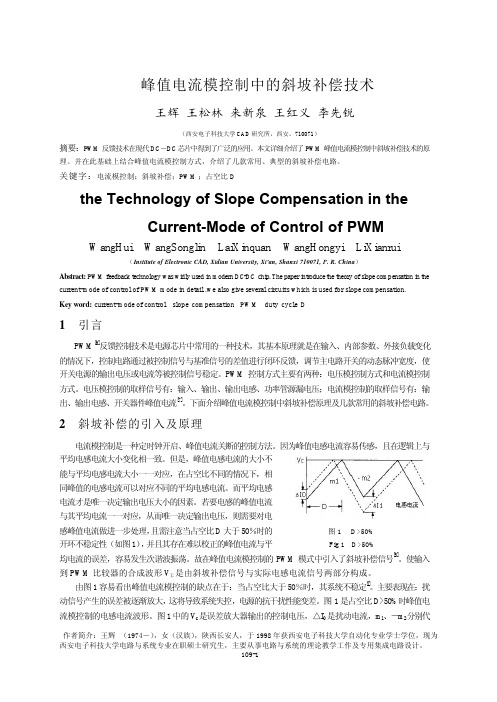
图 4 n 阶线性斜坡产生原理图 Fig 4 Functional Diagram for N Rank Linear Slope Generator
空比的增大, 斜率补偿信号的幅度也会增大, 图 5 三阶线性斜坡
Fig 5 3 Rank Linear Slope
109-3
时序图可以看到,斜坡的产生与外部时钟 同步,并随其改变[3] [4]。 3. 5 非线性斜坡产生电路 以上的几种斜坡均是由振荡器先产生 一个三角锯齿波,然后再经过电路处理而 得出补偿信号。这样所波由功率管的控制信号产生,并且其 与经过电路网络处理后的电感电流做比较
图3 线性斜坡产生电路 Fig 3 the Linear Slope Generator Circuit
109-2
坡信号加在三个晶体管的基极,随着斜坡幅 值的增加,Q1、Q2、Q3、依次导通,从而形 成三阶线性斜波(如图 5 所示)islope [3]。 3.3 带箝位的斜坡补偿电路 加斜率补偿后随着占空比的增大,实际 的电感电流峰值被降低了。这是因为随着占 从而导致峰值电流门限在主开关导通的后期 显著下降。当占空比达到 90%时,补偿信号 将电感峰值电流减小了 30%。解决途径之一 便是当发生斜坡补偿时提高控制门限电平。 但是仅仅提高门限并不是个可靠的办法,一 是误差放大器输出的控制信号会经过一个 RC 滤波网络再反馈到 PWM 比较器中,该 滤波网络的时常数一般都很大,那么门限控 制电平将无法跟上补偿斜坡的快速变化。二 是单纯的提高门限则会将斜坡补偿化为乌 有。但是,若在斜坡部分加一个箝位电路, 该箝位电路的箝位电压可以根据斜坡信号的幅度加以调 节, 进而保证在大占空比下电感峰值电流实质上不变 (如 图 6 示) 。 并且斜坡补偿信号的引入使得箝位电路的箝位 阈值随着斜坡补偿信号幅度的增减而增减,最后将其经 过处理的斜坡补偿信号箝位在 V1 和 V2 上经 ERR4 输出。 3. 4 可外同步的斜坡补偿电路 以上的斜坡产生电路均是内同步的,但在有些通信 系统应用中,系统同步是很重要的,整个系统需要在统 一的时钟下同步运行,因此需要斜坡补偿部分随外部电 路时钟进行变化。如图 7 所示可外同步的斜坡补偿电路 框图。下面介绍一下该电路中的各模块功能: 时钟检测及脉冲触发电路:检测到有时钟输入时, 将计数器预置一个数,并在每个周期内产生一个脉冲。 窗口比较器: 限定三角波的峰值在 Vref1<V<Vref2 之间。 电容 C1 :在 φ A 控制下充放电产生三角波。 计数器:外部时钟变化或三角波峰值电压 V 不在 Vref1 和 Vref2 时,触发其进行计数。当 V 低于 Vref1 时上计数,每 计一个数则打开一个电流源, 加大对 C1 的充电电流以提高 斜坡峰值; 当 V 高于 Vref2 时, 在外时钟同步下进行下计数, 每减一个数则关闭一个电流源,降低下一个时钟周期的三角波峰值;当 Vref1<V<Vref2 时,逻辑控制模块将计 数时钟屏蔽,则打开固定的电流源,此时斜坡峰值将不再变化。其整个工作过程的大概波形如图 8 所示。由
pwm 负斜率斜坡补偿
pwm 负斜率斜坡补偿
PWM负斜率斜坡补偿是指在PWM输出信号中使用负斜率斜坡进行补偿,以达到减小输出电流的目的。
在PWM控制中,PWM信号的占空比决定了输出电流的大小。
正常情况下,PWM信号的上升沿和下降沿应该是垂直的,以保证输出电流平稳。
然而,由于电路元件的非线性特性,电流在上升沿和下降沿之间可能存在瞬时的过大或过小的情况,从而影响系统的稳定性。
为了解决这个问题,可以使用负斜率斜坡补偿。
所谓负斜率斜坡补偿,就是在PWM信号的下降沿上添加一个负斜率的斜坡信号。
具体的方法是在下降沿期间,将PWM信号的占空比逐渐减小,使得输出电流逐渐减小,从而达到补偿的目的。
使用负斜率斜坡补偿可以有效地减小输出电流瞬时过大或过小的情况,提高系统的稳定性和性能。
峰值电流控制中的斜坡补偿研究
本科毕业设计(论文)峰值电流控制中的斜坡补偿研究***燕山大学2012年 6 月本科毕业设计(论文)峰值电流控制中的斜坡补偿研究学院(系):***专业:08级应用电子学生姓名:***学号:***指导教师:***答辩日期:2012年6月17日燕山大学毕业设计(论文)任务书摘要摘要相比传统的线性电源,DC-DC开关电源由于具有高效率、高可靠性、体积小等优点,使其成为国内外研究的热点。
电流模式DC-DC开关电源具有响应速度快、稳定性高、内在限流保护等特点在电源管理芯片中得到了广泛的运用。
在这一背景下,本文以Boost变换器为例,设计峰值电流控制的斜坡补偿电路;输入电压48V,输出电压200V。
本文主要研究电流模式DC-DC开关电源中斜坡补偿理论,分析了电感电流扰动导致控制环路产生不稳定的原因,给出抑制这种不稳定因素的处理办法即斜坡补偿方法。
针对此问题提出斜坡补偿设计思想,在此理论基础上完成了相应的斜坡补偿控制电路路设计。
本文中完成了DC-DC开关电源系统的各个单元电路设计与分析,重点分析斜坡补偿控制电路的设计。
最后采用MATLAB软件进行仿真。
通过整体仿真,实现稳定电压,系统具有良好的负载调整特性和快速的稳态恢复时间和优良的电源调整率。
关键词开关电源,峰值电流模式,斜坡补偿AbstractAbstractThe switch power possesses the advantages of high efficiency, high reliability and compact size compared with conventional linear power which becomes a pop research object home and abroad. Due to its characteristics of fast response, good stability, inherent current limiting, current-mode controller has been widely applied in power management circuits. In this background, this paper to Boost converter as an example, the design of peak current control slope compensation circuit; the input voltage 48V, output voltage 200V.This paper mainly studies the current mode switching power supply DC-DC slope compensation in theory, analysis of inductor current disturbance causes the control loop to generate unstable reason given, inhibition of the unstable factors approach that slope compensation method. The slope compensation design, on the basis of the theory to accomplish the corresponding slope compensation control circuit design. This paper completed the DC-DC switching power supply system each unit circuit design and analysis, focusing on the analysis of the slope compensation control circuit design. Finally using the MATLAB software simulation. Through the simulation, to achieve stable voltage, the system has a good load regulation characteristics and rapid steady state recovery time and excellent power adjustment rate.Keywords Switch power supply, peak current mode, slope compensation目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.2开关电源的发展阶段 (2)1.3开关电源的发展趋势 (4)1.4论文的主要内容和设计目标 (4)1.5本章小结 (5)第2章电流峰值控制 (6)2.1开关电源基础知识 (6)2.2升压型(BOOST)变换器电路 (7)2.2.1工作原理和工作过程 (7)2.2.2稳态波形和主要参数计算 (8)2.3电流峰值控制 (11)2.3.1 电流峰值控制的概念 (13)2.3.2 电流控制的稳定性问题 (15)2.4本章小结 (20)第3章斜坡补偿电路设计 (21)3.1锯齿波补偿稳定电流控制的稳定性分析 (21)3.2常见的几种斜坡产生电路 (25)3.2.1线性斜坡 (25)3.2.2 n阶线性斜坡 (27)3.2.3带箝位的斜坡补偿电路 (31)3.2.4可外同步的斜坡补偿电路 (32)3.2.5非线性斜坡产生电路 (32)3.2.6总结这几种斜坡补偿电路 (33)3.3本章小结 (34)第4章仿真结果 (35)4.1仿真 (35)4.2本章小结 (40)结论 (41)参考文献 (42)致谢 (43)附录1 (44)附录2 (47)附录3 (50)附录4 (54)附录5 (60)第1章绪论第1章绪论1.1 课题背景随着电子技术的飞速发展和不断创新,电子电力设备与人们工作和生活的关系日益密切,其性能的优劣直接关系到电子设备的技术指标及能否安全可靠地工作,由此也带来了电源管理技术的腾飞。
活学活用PWM控制器之斜坡补偿方法科普
活学活用PWM控制器之斜坡补偿方法科普
PWM控制器作为一种非常常见的重要电子元件,在中小功率开关电源
及消费类电子产品的电路系统设计中应用广泛。
本文将会针对PWM控制器
的斜坡补偿方法进行简单介绍和科普,希望能够对正在进行电子技术学习的
爱好者和初学者带来一定的帮助。
在一些中小功率开关电源模块的研制过程中,很多工程师都需要面对一个
问题,那就是在采用了电流型PWM控制器的电路系统中,会出现输出电压
正比于输出电流平均值而不是正比于峰值电流的情况。
众所周知,功率开关
管的峰值电流由PWM控制器保持恒定控制,当输入电压减小时,为了使电
流恒定,占空比将调节为D2,这时平均电流将上升为I2,输出电压也将上升。
在电流型控制器件的调节下,仅有输出电压能够得到控制。
那幺,采用斜坡补偿的方式可以解决电流型PWM控制器的这一应用弊端吗?答案是肯定的。
首先来看斜坡补偿的技术原理。
为了维持一个恒定的平
均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当(NsPNp)Rs(m2P2)=m成立时,输出电感平均电流与Ton无关,则保持
了输出电压恒定。
电流型PWM控制器的平均电流曲线如下图图1所示。
图1 电流型PWM控制器平均电流曲线
在实际的电路系统设计过程中,采用斜坡补偿的技术是比较容易实现的,
一般可以直接用图2所展示的电路来实现。
在图2所展示的斜坡补偿原理图中,一般R1的阻值预先设定,再计算R2的阻值,需要特别注意的一个问题
是R2的阻值必须足够高,以避免使振荡器产生振荡频率漂移。
PWM控制基本原理详解
PWM控制基本原理详解PWM控制基本原理详解PWM控制基本原理详解: PWM脉宽调制,是靠改变脉冲宽度来控制输出电压,通过改变周期来控制其输出频率。
而输出频率的变化可通过改变此脉冲的调制周期来实现。
这样,使调压和调频两个作用配合一致,且于中间直流环节无关,因而加快了调节速度,改善了动态性能。
由于输出等幅脉冲只需恒定直流电源供电,可用不可控整流器取代相控整流器,使电网侧的功率因数大大改善。
利用PWM逆变器能够抑制或消除低次谐波。
加上使用自关断器件,开关频率大幅度提高,输出波形可以非常接近正弦波。
PWM变频电路具有以下特点:1. 可以得到相当接近正弦波的输出电压2. 整流电路采用二极管,可获得接近1的功率因数3. 电路结构简单4. 通过对输出脉冲宽度的控制可改变输出电压,加快了变频过程的动态响应现在通用变频器基本都再用PWM控制方式,所以介绍一下PWM 控制的原理PWM基本原理脉宽调制(PWM)。
控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。
也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次斜波谐波少。
按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。
在采样控制理论中有一个重要的结论,即冲量相等而形状不同的窄脉冲加在具有惯性的环节上,其效果基本相同。
冲量既指窄脉冲的面积。
这里所说的效果基本相同。
是指该环节的输出响应波形基本相同。
如把各输出波形用傅里叶变换分析,则它们的低频段特性非常接近,仅在高频段略有差异。
根据上面理论我们就可以用不同宽度的矩形波来代替正弦波,通过对矩形波的控制来模拟输出不同频率的正弦波。
例如,把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。
这些脉冲宽度相等,都等于∏/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,各脉冲的幅值按正弦规律变化。
电流型变换器工作原理和斜坡补偿
电流型变换器工作原理和斜坡补偿电流型变换器工作原理和斜坡补偿1引言由于电流型控制较电压型控制方法有许多优点,所以得到了广泛使用,这已是不争的事实。
但在恒频峰值电流检测控制方法中还存在如下问题:——占空比大于50%时系统的开环不稳定性;——由于峰值电流而非平均电感电流的原因而产生的系统开环不稳定性;——次谐波振荡;——抗干扰能力差,特别当电感中的纹波电流成分很小时,这种情况更为严重。
采用图1所示的在电流波形上加斜坡补偿的方法,可使电流型控制法在占空比大于50%的情况下,使系统稳定工作。
实际上,只要电流型变换器采用了斜坡补偿,它的性能能得到很大的改善。
2峰值电流型控制存在的问题下面主要讨论峰值电流型控制存在的问题及利用斜坡补偿克服所存在问题的方法,并给出斜坡补偿的实施方案。
2.1开环不稳定性在不考虑外环电压环的情况下,当恒频电流型变换器的占空比大于50%时,就存在内环电流环工作不稳定的问题。
然而有些变换器(如双管正激变换器)它本身工作的脉冲占空比就不能大于50%,因此不存在问题。
而有些变换器的脉冲占空比不大于50%时,它的输入将会受到许多限制,如果在内环加一个斜坡补偿信号,则变换器可以在任何脉冲占空比情况下正常工作。
下面介绍斜坡补偿工作原理。
图2表示了由误差电压Ve控制的电流型变换器的波形,通过一个拢动电流△I加至电感电流IL,当占空比<0.5时,从图2(a)所示可以看出这个拢动ΔI将随时间的变化而减小;但当占空比>0.5时,这个拢动将随时间增加而增加,。
这可用数学表达式表示:ΔI1=-ΔI0(m2/m1)(1)进一步可引入斜率为-m的斜坡信号,。
这个斜坡电压既可加至电流波形上,也可以从误差电压中减去。
有下列方程式成立:ΔI1=-ΔI0(m2+m)/(m1+m)(2)图1采用斜坡补偿的BUCK电流型控制图2电流型变换器的开环不稳定性(a)D<0.5(b)D>0.5(c)D>0.5并加斜坡补偿图3没有斜坡补偿的峰值电流检测与占空比关系图图4斜坡补偿m=-(1/2)m2时的平均电感电流将和占空比D、输入电压无关在100%占空比下求解这个方程有:m>(-1/2)/m2(3)为了保证电流环路稳定工作,应使斜坡补偿信号的斜率大于电流波形下降斜率m2的1/2。
电流控制技术和斜坡补偿
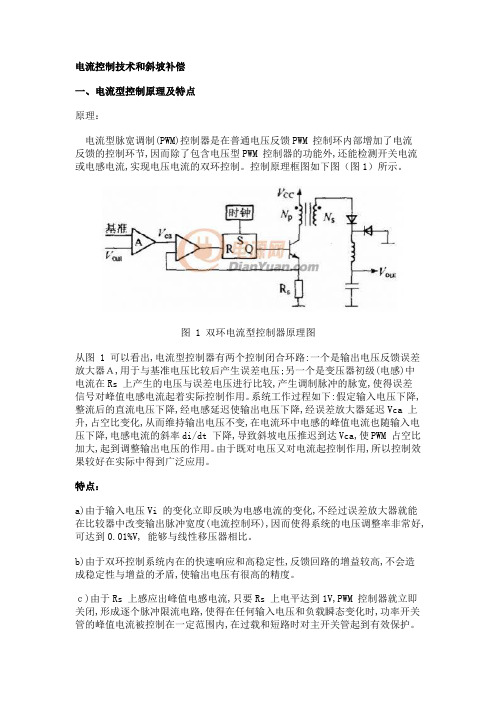
电流控制技术和斜坡补偿叶泽刚时间:2010-11-29 594次阅读【网友评论0条我要评论】收藏电源网讯一、电流型控制原理及特点原理:电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
控制原理框图如下图(图1)所示。
图 1 双环电流型控制器原理图从图 1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
特点:a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%V, 能够与线性移压器相比。
b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
JT3027 高性能电流模式PWM开关电源控制器说明书
概述:特点:JT3027是一款高集成度、高性能的电流模式PWM控制器芯片。
适用于电源适配器等中小功率的开关电源设备。
为了降低待机功耗,满足更高的绿色环保标准,芯片提供了脉冲模式功能。
即在轻载或者无负载情况下,JT3027可以线性地降低芯片的开关频率,减少开关的损耗,提高电源系统的转化效率。
通过优化设计,JT3027具有极低的启动电流和工作电流,不仅有利于启动电路设计,而且可以使用大阻值的启动电阻,以降低待机功耗,提高转换效率。
JT3027内置同步斜坡补偿电路,改善了系统的大信号稳定性,避免了PWM在高占空比输出的时候可能产生的谐波振荡。
JT3027在反馈输入引脚端内置了前沿消隐电路,能有效去除反馈信号中的尖峰。
有助于减少开关电源系统的外部元器件数量,降低系统的整体成本。
JT3027提供了多种全面的可恢复保护模式,其中包括:逐周期电流限制保护(OCP)、过载保护(OLP)、VDD嵌位保护、以及低压关闭(UVLO)。
其中,为了更好的保护外部MOSFET功率管,栅极驱动输出电压被钳位在18V。
JT3027内部采用了频率抖动技术同时在图腾柱栅极驱动输出端使用了软开关控制技术,可以很好的改善开关电源系统的EMI性能。
通过优化设计,当芯片的工作频率低于20KHz的情况下,音频能量可以降低到最小值。
因此,音频噪声性能可以获得很大程度的改善。
JT3027芯片可以作为线性电源或者RCC模式电源的最佳替代产品,从而提高开关电源系统的整体性能,并有效地降低系统成本。
JT3027提供8-PIN的SOP8与DIP8的封装以及6-PIN的SOT23-6封装。
■ Burst Mode功能;■ 低启动电流(4.5uA)和低工作电流(1.75mA);■ 内置前沿消隐;■ 内置同步斜坡补偿;■ 电流模式工作;■ 频率抖动功能;■ 外部可编程的PWM开关频率;■ 逐周期电流限制保护(OCP);■ 内建系统VDD嵌位保护;■ 低电压关闭功能(UVLO);■ 栅驱动输出电压钳位(18.5V);■ 恒定输出功率限制;■ 过载保护(OLP);■ 工作时不产生音频噪声应用:通用的开关电源设备以及离线AC/DC反激式电源转换器:■ 笔记本电源适配器;框图: ■ 机顶盒电源;■ 开放式开关电源;■ 电池充电器典型应用图:引脚功能说明:符号引脚类型功能说明GATE 驱动输出图腾柱栅极驱动输出引脚。
电流模式控制PWM原理和电路图
电流模式控制PWM原理和电路图电流模式控制PWM原理和电路图作者:微叶科技时间:2015-06-20 17:23以电流作为采样控制信号的PWM称为电流模式控制PWM。
下面分别介绍峰值电流模式控制PWM和平均电流模式控制 PWM。
1.峰值电流模式控制PWM峰值电流模式控制PWM(Peak Current-mode Control PWM)是一种固定时钟开启、峰值电流关断的控制方法。
其典型电路如图1所示。
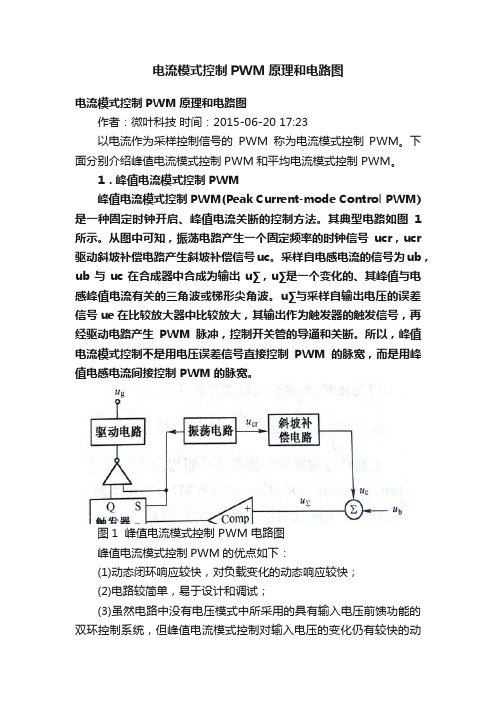
从图中可知,振荡电路产生一个固定频率的时钟信号ucr,ucr 驱动斜坡补偿电路产生斜坡补偿信号uc。
采样自电感电流的信号为ub,ub与uc在合成器中合成为输出u∑,u∑是一个变化的、其峰值与电感峰值电流有关的三角波或梯形尖角波。
u∑与采样自输出电压的误差信号ue在比较放大器中比较放大,其输出作为触发器的触发信号,再经驱动电路产生PWM脉冲,控制开关管的导通和关断。
所以,峰值电流模式控制不是用电压误差信号直接控制PWM的脉宽,而是用峰值电感电流间接控制 PWM的脉宽。
图1 峰值电流模式控制 PWM 电路图峰值电流模式控制PWM的优点如下:(1)动态闭环响应较快,对负载变化的动态响应较快;(2)电路较简单,易于设计和调试;(3)虽然电路中没有电压模式中所采用的具有输入电压前馈功能的双环控制系统,但峰值电流模式控制对输入电压的变化仍有较快的动态响应。
虽然峰值电感电流容易采样,而且逻辑上与平均电感电流大小的变化相一致。
但是在不同占空比的情况下,同一峰值电感电流值却对应不同的平均电感电流值,即峰值电感电流与平均电感电流之间不存在唯一的对应性。
而在电流模式控制中,平均电感电流的变化是决定输出电压变化的唯一因素,所以在占空比较大的情况下,由于开环控制的不稳定性,难以精确校正峰值电感电流与平均电感电流之间的对应关系。
一般情况下,占空比的取值要小于50%。
但是,即使占空比小于50%,也极易产生次谐波振荡。
为了克服这种不稳定性,必须采用斜坡补偿。
斜率补偿
“斜率补偿”是指用电流控制方式时,将一部分锯齿波电压加到控制信号上,以改进控制特性,包括消除谐波振荡。
开关电源以其高效率、小体积等优点获得了广泛的应用。
近年电流型PWM技术得到了飞速发展。
相比电压型PWM,电流型PWM具有更好的电压调整率和负载调整率,系统的稳定性和动态特性也得到明显的改善。
与电压型PWM比较,电流型PWM控制在保留了输出电压反馈控制外,又增加了一个电流反馈环节,给环路调试带来了一定困难。
这种困难不仅仅是由双环反馈带来的,还要考虑通过电流环引入的谐波干扰。
另外,电流采样信号通常来自于变压器原边,有比较大的开关噪声,特别是对于大功率模块会对环路的稳定性有很大的影响。
电流模式变换器工作在占空比大于50%和连续电感电流的条件下,会产生谐波振荡,这种不稳定性与稳压器的闭环特性无关。
既然是独立于系统环路之外的扰动信号,就可以在保证系统环路稳定并具有一定的系统裕量的前提下,对电流环扰动单独处理。
斜率补偿是比较常用的方法,现将其基本的补偿原理以及实际工作中使用的几种典型电路加以分析整理。
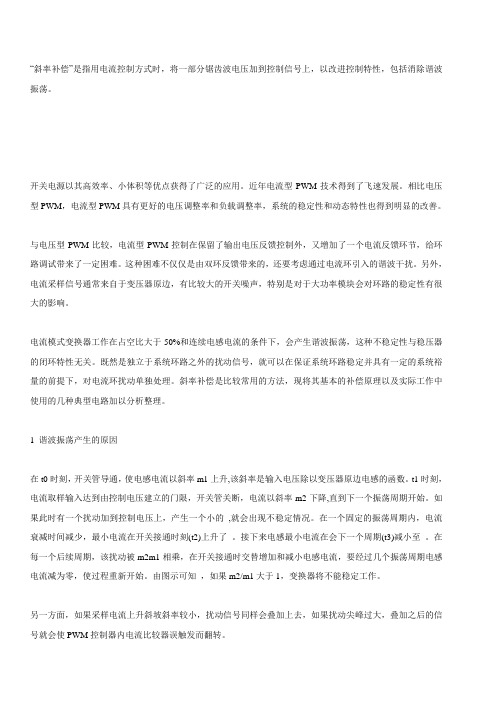
1 谐波振荡产生的原因在t0时刻,开关管导通,使电感电流以斜率m1上升,该斜率是输入电压除以变压器原边电感的函数。
t1时刻,电流取样输入达到由控制电压建立的门限,开关管关断,电流以斜率m2下降,直到下一个振荡周期开始。
如果此时有一个扰动加到控制电压上,产生一个小的,就会出现不稳定情况。
在一个固定的振荡周期内,电流衰减时间减少,最小电流在开关接通时刻(t2)上升了。
接下来电感最小电流在会下一个周期(t3)减小至。
在每一个后续周期,该扰动被m2m1相乘,在开关接通时交替增加和减小电感电流,要经过几个振荡周期电感电流减为零,使过程重新开始。
由图示可知,如果m2/m1大于1,变换器将不能稳定工作。
另一方面,如果采样电流上升斜坡斜率较小,扰动信号同样会叠加上去,如果扰动尖峰过大,叠加之后的信号就会使PWM控制器内电流比较器误触发而翻转。
电流控制技术和斜坡补偿
电流控制技术和斜坡补偿一、电流型控制原理及特点原理:电流型脉宽调制(PWM)控制器是在普通电压反馈PWM 控制环内部增加了电流反馈的控制环节,因而除了包含电压型PWM 控制器的功能外,还能检测开关电流或电感电流,实现电压电流的双环控制。
控制原理框图如下图(图1)所示。
图 1 双环电流型控制器原理图从图 1 可以看出,电流型控制器有两个控制闭合环路:一个是输出电压反馈误差放大器A,用于与基准电压比较后产生误差电压;另一个是变压器初级(电感)中电流在Rs 上产生的电压与误差电压进行比较,产生调制脉冲的脉宽,使得误差信号对峰值电感电流起着实际控制作用。
系统工作过程如下:假定输入电压下降,整流后的直流电压下降,经电感延迟使输出电压下降,经误差放大器延迟Vca 上升,占空比变化,从而维持输出电压不变,在电流环中电感的峰值电流也随输入电压下降,电感电流的斜率di/dt 下降,导致斜坡电压推迟到达Vca,使PWM 占空比加大,起到调整输出电压的作用。
由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
特点:a)由于输入电压Vi 的变化立即反映为电感电流的变化,不经过误差放大器就能在比较器中改变输出脉冲宽度(电流控制环),因而使得系统的电压调整率非常好,可达到0.01%V, 能够与线性移压器相比。
b)由于双环控制系统内在的快速响应和高稳定性,反馈回路的增益较高,不会造成稳定性与增益的矛盾,使输出电压有很高的精度。
c)由于Rs 上感应出峰值电感电流,只要Rs 上电平达到1V,PWM 控制器就立即关闭,形成逐个脉冲限流电路,使得在任何输入电压和负载瞬态变化时,功率开关管的峰值电流被控制在一定范围内,在过载和短路时对主开关管起到有效保护。
d)误差放大器用于控制,由于负载变化造成的输出电压变化,使得当负载减小时电压升高的幅度大大减小,明显改善了负载调整率。
e)由于系统的内环是一个良好的受控电流放大器,所以把电流取样信号转变成的电压信号和一个公共电压误差放大器的输出信号相比较,就可以实现并联均流,因而系统并联较易实现。
峰值电流控制变换器斜坡补偿电路的优化设计
峰值电流控制变换器斜坡补偿电路的优化设计在现代电力电子领域,峰值电流控制变换器因其诸多优点而得到了广泛应用。
然而,在其工作过程中,存在着一些潜在的不稳定因素,其中一个关键问题就是需要进行斜坡补偿。
斜坡补偿电路的设计对于保证峰值电流控制变换器的稳定运行和性能优化至关重要。
本文将深入探讨峰值电流控制变换器斜坡补偿电路的优化设计,以满足日益复杂的电力电子应用需求。
一、峰值电流控制变换器的工作原理在深入研究斜坡补偿电路之前,我们首先需要了解峰值电流控制变换器的基本工作原理。
峰值电流控制模式是通过检测电感电流的峰值,并将其与控制信号进行比较来调节输出。
这种控制方式响应速度快,能够有效地提高系统的动态性能。
然而,峰值电流控制模式存在一个固有的问题,即在占空比大于 50%时,系统容易出现不稳定现象。
这是由于电感电流的峰值和平均值之间存在误差,导致控制环路的增益发生变化,从而影响系统的稳定性。
二、斜坡补偿的必要性为了解决峰值电流控制变换器在占空比大于 50%时的不稳定问题,引入斜坡补偿是必要的。
斜坡补偿的基本思想是在电感电流的检测信号上叠加一个适当的斜坡信号,以修正电感电流峰值和平均值之间的误差,从而保证系统在整个占空比范围内的稳定性。
如果没有斜坡补偿,当占空比增大时,电感电流的峰值和平均值之间的差异会逐渐增大,导致控制环路的增益不稳定,可能引发系统的振荡或不稳定运行。
因此,斜坡补偿对于维持峰值电流控制变换器的稳定工作具有重要意义。
三、常见的斜坡补偿电路类型在实际应用中,常见的斜坡补偿电路有多种类型。
其中,基于电阻电容(RC)网络的斜坡补偿电路是较为简单和常用的一种。
这种电路通过在检测电阻上并联一个 RC 网络,产生一个与电感电流斜率相反的斜坡信号,从而实现补偿。
另外,基于电流源的斜坡补偿电路也是一种有效的方式。
电流源通过对电容进行充电或放电,产生所需的斜坡信号。
这种电路具有较高的精度和稳定性,但设计相对复杂,成本也较高。
TC2263(电流模式PWM控制IC)中文技术资料
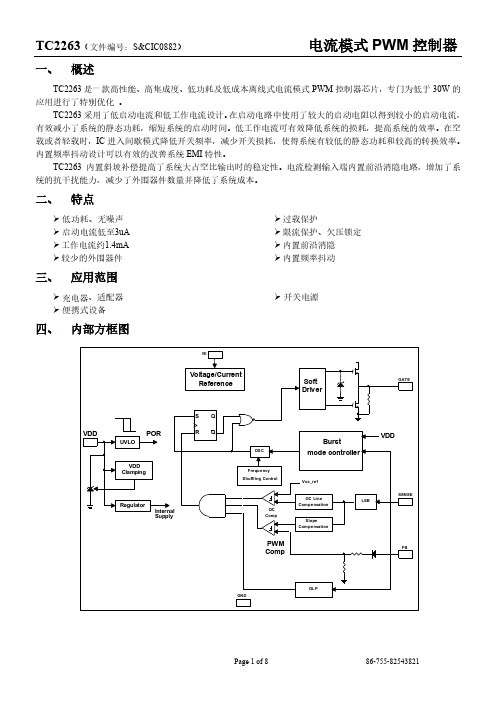
一、概述TC2263是一款高性能、高集成度、低功耗及低成本离线式电流模式PWM控制器芯片,专门为低于30W的应用进行了特别优化。
TC2263采用了低启动电流和低工作电流设计。
在启动电路中使用了较大的启动电阻以得到较小的启动电流,有效减小了系统的静态功耗,缩短系统的启动时间。
低工作电流可有效降低系统的损耗,提高系统的效率。
在空载或者轻载时,IC进入间歇模式降低开关频率,减少开关损耗,使得系统有较低的静态功耗和较高的转换效率。
内置频率抖动设计可以有效的改善系统EMI特性。
TC2263 内置斜坡补偿提高了系统大占空比输出时的稳定性。
电流检测输入端内置前沿消隐电路,增加了系统的抗干扰能力,减少了外围器件数量并降低了系统成本。
二、特点低功耗、无噪声 启动电流低至3uA 工作电流约1.4mA 较少的外围器件 过载保护限流保护、欠压锁定 内置前沿消隐内置频率抖动三、应用范围充电器、适配器 开关电源五、 典型应用1234DCBAVDD GATERI SENSE FBGND1234+ACINEMI Filter++DC OUT六、 管脚图及管脚说明CBA1234567812345678GATEVDD NC SENSERINC FB GNDGATE VDD NCSENSERINC FB GND 123456GNDFBRISENSE VDD GATESOT-26SOP-8DIP-8TC2263MP TC2263CP TC2263AP管脚名称 I/O 功能说明GND P 芯片地 FB I 反馈输入端RI I 振荡频率设置端。
改变连接到地的电阻设置PWM 频率。
SENSE I 电流检测输入端。
连接到电流采样电阻。
VDD P 电源输入端GA TEOPWM 输出端。
连接开关管栅级。
七、最大额定值注:最大允许额定值是指超过这些值可能会损坏器件,在这些条件式之下是不利于的器件工作的。
器件连续工作在最大允许额定值下可能影响器件可靠性。
电流控制技术和斜坡补偿
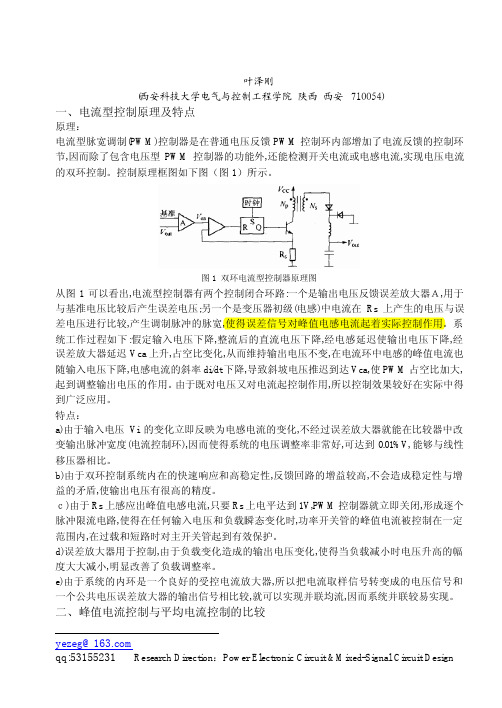
图 8 次谐波振荡时的电感电流波形
4.振铃电感电流 每个周期的电感电流误差关系如下:
m + m2 ∆I n = − ∆I n−1 m + m1
由此可以绘出每个周期等效电感电流的瞬时值、电感电流误差和周期T的关系曲线如图 9 所 示。由图 9 可以看出, 电感电流是一个按二分之一开关频率衰减的正弦波, 类似于一个RLC 响应电路。这种电流有两个不利之处: ① 电感电流对电源或负载的瞬态变化产生振铃响应; ② 在开关频率附近控制环路增益达到最高, 从而产生不稳定趋向。 通过斜坡补偿可以抑制这种振铃电感电流, 例如当补偿坡度为电感电流下降沿的斜率时 (即m=-m2), 振铃电流在一个周期内就完全得到了抑制。
图 6 尖峰电流控制模式中不带斜坡补偿的平均电流和尖峰电流波形图
另外图 7 所示的电感电流平均值和峰值间也存在差值, 在BUCK电路中由于电感电流 的纹波相对电感电流的平均值很小, 并且存在电压外环的校正作用, 所以峰值和平均值的这种 误差可以忽略;在BOOST电路中, 峰值要跟随输入电网的正弦波, 所以和平均值间的误差很 大。这种误差最大, 需要一个大电感来使电感电流的纹波变小, 减小抗干扰能力。这也是在B OOST中采用平均值电流模式的原因。
图 7 尖峰电流控制模式中带斜坡补偿的平均电流和尖峰电流波形图
3.抑制次谐波振荡 内部电流环的增益尖峰是电流模式控制的一个重要问题。这种增益尖峰发生在二分之一开关 频率处, 使相移超出范围, 导致不稳定, 并使电压环进入次谐波振荡。这时在连续固定的驱动脉 冲下, 输出占空比却在变化, 如图 8 所示。采用斜坡被偿也能很好地抑制次谐波振荡。
图 10 斜坡补偿电路
图 11 简化的斜坡补偿电路
斜坡补偿设计步骤:
斜坡补偿电路原理
斜坡补偿电路原理你看啊,在电源电路里呢,有个叫电流模式控制的方法。
这就像是一个小管家,要管着电路里电流的事儿。
可是呢,这个小管家有时候也会遇到麻烦。
比如说,当占空比(这就像是电流工作的时间比例啦)变得比较大的时候,电路就会开始捣乱,它会出现一种不稳定的情况,就像小朋友闹脾气一样。
那怎么办呢?这时候斜坡补偿电路就闪亮登场啦。
斜坡补偿电路就像是一个超级英雄,来拯救这个不稳定的局面。
想象一下,电路里的电流或者电压信号就像一座座小山包。
正常情况下呢,这些小山包按照一定的规律排列着,电路就稳稳当当的。
但是当占空比变大的时候,这些小山包就开始变得歪歪扭扭,电路就跟着不稳定啦。
斜坡补偿电路呢,它会给这些小山包添加一些特殊的“泥土”,让小山包重新变得规规矩矩的。
具体来说哦,斜坡补偿电路会产生一个斜坡信号。
这个斜坡信号就像是一把神奇的小铲子,把那些不整齐的小山包重新塑形。
这个斜坡信号会和原来电路里的信号混合在一起。
比如说,原来的信号是往上冲得太猛了,斜坡信号就像一个温柔的力量,拉着它,让它慢慢上升,而不是一下子就冲到天上去。
你可以把原来的电路信号想象成一个调皮的小猴子,总是上蹿下跳的。
斜坡补偿电路产生的信号呢,就像是小猴子的妈妈,牵着它,让它稳稳地走路。
这样一来,电路就不会因为电流或者电压信号的乱跳而不稳定啦。
再从数学的角度看一丢丢哈。
在没有斜坡补偿的时候,电路的一些计算就像是在走钢丝,很容易出错。
一旦加上了斜坡补偿,就像是给走钢丝的人加上了安全绳。
它改变了电路的一些数学关系,让那些原本可能会导致电路混乱的计算变得合理起来。
而且哦,斜坡补偿电路的这个斜坡信号可不是随便乱加的。
它的斜率是经过精心设计的。
就像裁缝做衣服,每一针每一线都得恰到好处。
如果斜率太大了,就像给小猴子的妈妈太大的力气,会把小猴子拉得太狠,电路又会出现新的问题。
要是斜率太小呢,就像妈妈根本拉不住小猴子,电路还是不稳定。
在实际的电路中,斜坡补偿电路的实现方式也是多种多样的。
斜坡补偿原理
斜坡补偿原理斜坡补偿原理是一种应用于矢量控制器的高级控制技术,它可以提高控制器的精确性和响应速度。
相比于传统的伺服控制,斜坡补偿原理可以使矢量控制的运行更加稳健、精确,并且可以提高系统的转矩和加速度性能。
斜坡补偿原理是一种可以改善矢量控制器性能的有效技术。
斜坡补偿原理根据变频器输出频率和电机转矩反馈的参数,以补偿电机实际运行状态中的不稳定现象,从而提高电机运转精度。
斜坡补偿原理一般应用于高精度控制系统中,如同步电机、换流器控制等。
斜坡补偿原理的基本原理是使变频器的输出对转矩的反应更加迅速,以更好地补偿电机负载的变化。
斜坡补偿原理通过连续监测变频器输出频率与电机转矩反馈的参数,当出现不稳定现象时,通过增加变频器的输出值来使负载加大,以形成一个斜坡模式。
这种模式可以有效地改善电机的转矩和加速度性能,使电机的性能达到最佳。
斜坡补偿原理的典型应用是调节电机转速和方向,以及调节矢量控制系统的电流比例和频率。
斜坡补偿原理可以有效改善电机的运转性能,减少电流抖动现象。
同时,斜坡补偿原理可以降低电机的工作温度,改善电机的寿命和可靠性。
斜坡补偿原理是现在矢量控制器中应用比较广泛的一种技术,它可以有效改善控制器的精确性、响应速度和电机的转矩和加速度性能,为用户提供更加优质的产品。
斜坡补偿原理的实施需要充分的理论研究和实验来证明它的作用,因此,研究和熟练应用斜坡补偿原理是控制工程师必备的技能之一。
总之,斜坡补偿原理是一种可以改善矢量控制器性能的有效技术,它可以使矢量控制的运行更加稳健、精确,并且可以提高系统的转矩和加速度性能,为用户提供更加优质的产品,因此,研究和熟练应用斜坡补偿原理是控制工程师必备的技能之一。
电流型PWM控制斜波补偿原理与系统的稳定
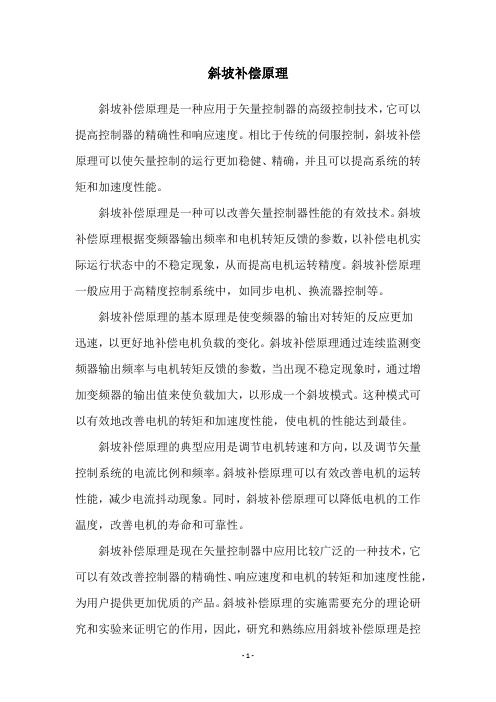
斜波补偿原理与系统的稳定电流型PWM控制系统的电流斜率补偿对于理想的系统,分析比较容易,但实际上,电解电容的ESR和开关管的最小死区,都会影响系统的稳定性。
电流内环的控制过程及电流斜坡如图1所示。
图中,m1为开关管导通期间电感电流iL上升率的等效折算值,m2为开关管关断期间电感电流iL下降率的等效折算值,他们又下式给出:m1=Vs/Tm2=VoR/LMN (1.1)图1所画的是稳定工作的情况下,当负载或输入电压变化时都会造成电流的变化。
当产生扰动时,系统能否稳定工作取决于其对扰动的相应是否收敛的。
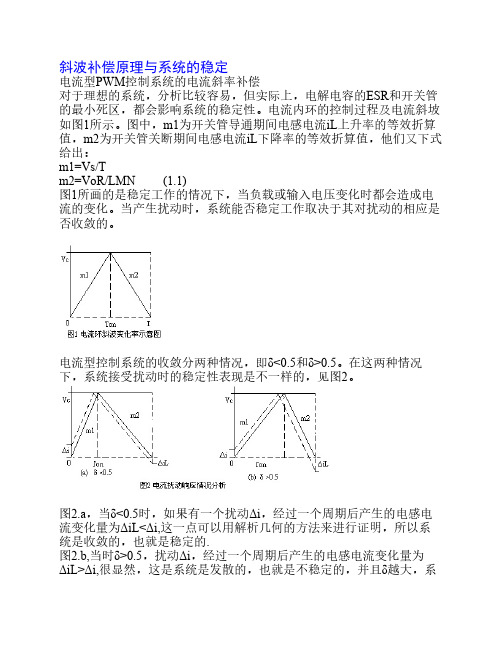
电流型控制系统的收敛分两种情况,即δ<0.5和δ>0.5。
在这两种情况下,系统接受扰动时的稳定性表现是不一样的,见图2。
图2.a,当δ<0.5时,如果有一个扰动Δi,经过一个周期后产生的电感电流变化量为ΔiL<Δi,这一点可以用解析几何的方法来进行证明,所以系统是收敛的,也就是稳定的.图2.b,当时δ>0.5,扰动Δi,经过一个周期后产生的电感电流变化量为ΔiL>Δi,很显然,这是系统是发散的,也就是不稳定的,并且δ越大,系统也就越不稳定。
为了解决δ>0.5时系统不稳定的问题,我们可以对电感电流Δi上升的斜率进行补偿,也就是加大等效的m1,实际上也就是人为地减小占空比δ,使其等效成δ<0.5时的稳定的情况。
增加Δi也就是增加Vs(最大Ton对应的电压值),实际上和减小Vc是等效的。
所以在分析补偿作用的时,我们来看减小Vc的情况。
但是在实际应用过程中,增加Vs和减小Vc都是可以的,有时增加Vs反而比减小Vc更方便。
减小Vc进行补偿的情况见图3所示。
图中,-m为减小Vc的斜率。
用解析几何的方法可以求出:ΔiL=-Δi(m+m2)/(m+m1) (1.2)由于δ越大,系统越不稳定,需要补偿的幅度也就越大,所以我们要考虑δ≈1时的情况。
当m1≈0时,即稳态时的iL≈TL,基本不变。
电流型控制模式的斜坡补偿
电流型控制模式的斜坡补偿杨仕伟【摘要】在传统的电压形式的调控之下, PWM控制器又新添了一个电流反馈环路,该种控制器是由电流模式控制的,添加了新的东西以后动能性明显有了很大的提高,这种模式,已经成为PWM 控制器的首先款式。
【期刊名称】《电子制作》【年(卷),期】2014(000)022【总页数】1页(P1-1)【关键词】电流模式控制;PWM控制器;电流反馈环路【作者】杨仕伟【作者单位】贵州师范学院 550025【正文语种】中文电流模式控制;PWM控制器;电流反馈环路在电压调控下的开关电源控制体系不但有一个单一的控制环路,同时又有个Q值的共同控制点,在开环倍率特征的线条上表现为一个振峰比较大的数值,使体系的震动频率大增。
为了将这种震动对整个体系产生不良的影响,通过电压控制仪器设备,利用PI或PID对整体体系进行震动频率的调整,而这种调控措施降低了整个体系低频段的震动损坏,使整个体系的反应速度降低,影响了震动的特性。
电流模式的调控系统,对电流正常使用产生不利的影响,对整个体系的开环效率产生好的影响,使其变得比较容易调整。
一般情况下,采用电流调控方式后,电压环的电流传递速率将会发生巨大变化,其频率特征线条也会受到谐振峰的影响,所以对电压环进行恰当的调整将变得十分容易,可以提高电流的运转效率,使得整个电流运转体系的动态性加强,为其提供一个更加稳定的运转环境,不过电流模式的调控也具有明显的不足之处,正如下面提到的:(1)所占用的空间面积超过一半还多的时候,整个体系就会出现不稳定的问题,特别容易引起次谐波振荡的出现。
此外,在选择电路拓扑结构的过程中还会受到不同程度的限制,在升压型电路和降压—升压型电路中,因为距离电流输出端的距离过远,所以在峰值电流与平均电流之间从在这很大的不足之处。
(2)对杂音很敏感,而且对这些声音的抵抗能力比较弱小。
由于电感处于连续储能电流之中,所以电流在经过斜坡的过程中其输送效率也会明显地降低,电流信号中一旦产生一些杂音就会对整个控制系统产生不良的影响,在关闭的时候将会对共振谐波产生很大的影响,使系统进入次谐波振荡。
电流型变换器斜率补偿_新南威尔士大学
新南威尔士大学 阿客东 译
确定斜率补偿 从数学公式上看,补偿斜率必须等于输出电感下降斜率的50%。关于这个论点可 以 看 文 章 “ Modelling, Analysis and Compensating of the Current Mode Controller,” (Unitrode publication U-97 and its references)。当占空比 大于50%时,开环工作电流就存在不稳定的问题。如果在开环上加一个斜率补偿 信号,则变换器可以在任何占空比情况下正常工作。从经验上说,75%的斜率补 偿是比较常用的。
新南威尔士大学 阿客东 译
图 4 简化电路图
这些计算适用于电流型变换器用一个类似斜率补偿电路图。 第一步:计算电感下降斜率 S(L) = di/dt = VSEC/ LSEC 第二步:计算对初级的反射下降斜率 S(L) ’= S(L)/N 第三步:计算测试下降斜率斜坡电压 V S(L)’= S(L)’ * Rsense 第四步:计算振荡器充电斜率 V S(OSC) = d (vosc) / Ton 第五步:产生斜坡电压等式 利用叠加原理,电路简化为图 5。
注:本文是U-111中斜率补偿的翻译(PRACTICAL CONSIDERATIONS IN CURRENT MODE POWER SUPPLIES)。译文的后半部非本人翻译(译者不详)。由于本人是 电源新手,因此许多地方翻译生硬。不足之处,希望各位同行能及时指出,以便 本人及时改正。
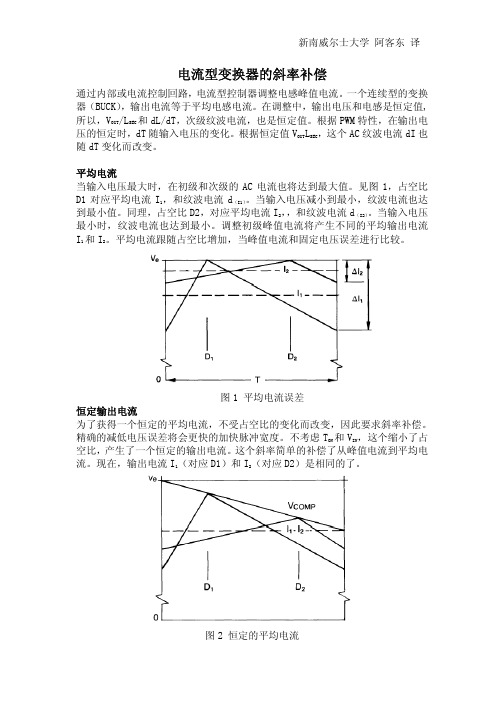
图 1 平均电流误差 恒定输出电流 为了获得一个恒定的平均电流,不受占空比的变化而改变,因此要求斜率补偿。 精确的减低电压误差将会更快的加快脉冲宽度。不考虑 TON 和 VIN,这个缩小了占 空比,产生了一个恒定的输出电流。这个斜率简单的补偿了从峰值电流到平均电 流。现在,输出电流 I1(对应 D1)和 I2(对应 D2)是相同的了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
斜波补偿原理与系统的稳定
电流型PWM控制系统的电流斜率补偿
对于理想的系统,分析比较容易,但实际上,电解电容的ESR和开关管的最小死区,都会影响系统的稳定性。
电流内环的控制过程及电流斜坡如图1所示。
图中,m1为开关管导通期间电感电流iL上升率的等效折算值,m2为开关管关断期间电感电流iL下降率的等效折算值,他们又下式给出:
m1=Vs/T
m2=VoR/LMN (1.1)
图1所画的是稳定工作的情况下,当负载或输入电压变化时都会造成电流的变化。
当产生扰动时,系统能否稳定工作取决于其对扰动的相应是否收敛的。
电流型控制系统的收敛分两种情况,即δ<0.5和δ>0.5。
在这两种情况下,系统接受扰动时的稳定性表现是不一样的,见图2。
图2.a,当δ<0.5时,如果有一个扰动Δi,经过一个周期后产生的电感电流变化量为ΔiL<Δi,这一点可以用解析几何的方法来进行证明,所以系统是收敛的,也就是稳定的.
图2.b,当时δ>0.5,扰动Δi,经过一个周期后产生的电感电流变化量为
ΔiL>Δi,很显然,这是系统是发散的,也就是不稳定的,并且δ越大,系
统也就越不稳定。
为了解决δ>0.5时系统不稳定的问题,我们可以对电感电流Δi上升的斜率进行补偿,也就是加大等效的m1,实际上也就是人为地减小占空比δ,使其等效成δ<0.5时的稳定的情况。
增加Δi也就是增加Vs(最大Ton对应的电压值),实际上和减小Vc是等效的。
所以在分析补偿作用的时,我们来看减小Vc的情况。
但是在实际应用过程中,增加Vs和减小Vc都是可以的,有时增加Vs反而比减小Vc更方便。
减小Vc进行补偿的情况见图3所示。
图中,-m为减小Vc的斜率。
用解析几何的方法可以求出:
ΔiL=-Δi(m+m2)/(m+m1) (1.2)
由于δ越大,系统越不稳定,需要补偿的幅度也就越大,所以我们要考虑δ≈1时的情况。
当m1≈0时,即稳态时的iL≈TL,基本不变。
这时,如果不进行补偿,系统肯定是不稳定的。
由式(1.2)可知,如果m能满足式:
m > -0.5m2 (1.3)
系统是收敛稳定的。
在实际应用中,我们一般取m≈0.75,以使得在Vo变化时,也即m2变化时,始终满足式(1.3),以保证系统的稳定。