ARM7(sc44b0)外部中断笔记
学习小结--ARM7中断原理
PINSEL0 = 0x00000000; // 设置管脚连接 GPIO IO1DIR = LED1; // 设置 I/O 为输出 Time0Init(); // 初始化定时器及使能中断 while(1); // 等待定时器中断或定时器匹配输出 return(0); } B 非 IRQ
把中断服务函数地址给默认向量地址寄存器(VICDefVectAddr - 0xFFFFF034, 读/写)即可!
if( (IO1SET&LED1) == 0 ) {
IO1SET = LED1; } else {
IO1CLR = LED1; } T0IR = 0x01; // 清除中断标志
VICVectAddr = 0x00; // 通知 VIC 中断处理结束 } /**************************************************************************** * 名 称:Time0Init() * 功 能:初始化定时器,定时时间为 S,并使能中断。 * 入口参数:无 * 出口参数:无 ****************************************************************************/ void Time0Init(void) {
ARM中断实现过程的个人笔记

HandleWDT # 4
HandleBDMA1 # 4
HandleBDMA0 # 4
HandleZDMA1 # 4
HandleZDMA0 # 4
HandleTICK # 4
HandleEINT4567 # 4
HandleEINT3 # 4
难道将程序从RO拷贝到RW后,ARM的中断后,是直接跳到SDRAM的0地址吗??
RO段指的是程序文件中的只读段,RW是文件中的可读写的段,一般我们将下载代码文件至Flash中,上电复位后,除了进行配置时钟,建立中断向量表这些外,还有一个重要的步骤,进行内存重映射,说的简单电,就是将程序文件从Flash中拷贝出来并将文件中的各段放在内存中对应的位置上,至于为什么这么做,可以在网上查找“bootloader的分析”,有几个文档讲的很详细。void InitInterrupts函数中的 *((volatile unsigned *)temp)=0xEA000000+0x1FFE这句的意思是先给所有的中断一个通用的中断服务函数。至于“ARM的中断后,不是跳到flash的中断向量表中吗?在那里得到放在_ISR_STARTADDRESS 中断服务程序的地址,再跳回到SDRAM中执行吗? ”这个问题,应该在调用InitInterrupts函数后调用了MMU的初始化函数,将0xc000000映射至地址0,在启用MMU后,中断后跳转的地址是0,这个0是虚拟地址
LDMFDsp!,{r0-r7,lr}
SUBSpc,lr,#4
实现中断的返回。
我在用一ARM开发板,看它的示例程序有个问题很是奇怪,怎么想不想不通,特来请教各位。
我的开发板的FLASH的地址是0,SDRAM的地址:0x0c000000. RW的入口设置为0x0c008000.
ARM的异常处理学习笔记转贴
ARM 的异常处理学习笔记转贴ARM的异常处理这部分比较不好理解。
当异常中断发生时,系统执行完当前指令后,将跳转到相应的异常中断处理程序处执行。
当异常中断处理程序执行完成后,程序返回到发生中断指令的下条指令处执行。
在进入异常中断处理程序时,要保存被中断程序的执行现场,从异常中断处理程序退出时,要恢复被中断程序的执行现场。
1、引起异常的原因(1)、指令执行引起的异常软件中断、未定义指令(包括所要求的协处理器不存在是的协处理器指令)、预取址中止(存储器故障)、数据中止。
(2)、外部产生的中断复位、FIQ、IRQ。
2、ARM中异常中断的种类(1)、复位(RESET)a、当处理器复位引脚有效时,系统产生复位异常中断,程序跳转到复位异常中断处理程序处执行,包括系统加电和系统复位。
b、通过设置PC跳转到复位中断向量处执行称为软复位。
(2)、未定义的指令当ARM处理器或者是系统中的协处理器认为当前指令未定义时,产生未定义的指令异常中断,可以通过改异常中断机制仿真浮点向量运算。
(3)、软件中断这是一个由用户定义的中断指令(SWI)。
可用于用户模式下的程序调用特权操作指令。
在实时操作系统中可以通过该机制实现系统功能调用。
(4)、指令与取终止(Prefech Abort)如果处理器预取的指令的地址不存在,或者该地址不允许当前指令访问,当被预取的指令执行时,处理器产生指令预取终止异常中断。
(5)、数据访问终止(DATAABORT)如果数据访问指令的目标地址不存在,或者该地址不允许当前指令访问,处理器产生数据访问终止异常中断。
(6)、外部中断请求(IRQ)当处理器的外部中断请求引脚有效,而且CPSR的寄存器的I控制位被清除时,处理器产生外部中断请求异常中断。
系统中个外设通过该异常中断请求处7)、快速中断请求(FIQ) 理服务。
(当处理器的外部快速中断请求引脚有效,而且CPSR的F控制位被清除时,处理器产生外部中断请求异常中断。
44B的中断介绍_eint4567配置实例_关于中断嵌套和向量中断
44b0中断介绍一般的ARM7核是软件判断优先级,if there are 10 interrupt requests at the same time, you can determine the interrupt service priority by reading the interrupt pending register。
这会耗费44B0默认没有中断嵌套。
30个中断源,其中EINT4567是OR在同一个源上,UART0和1的ERROR中断也是。
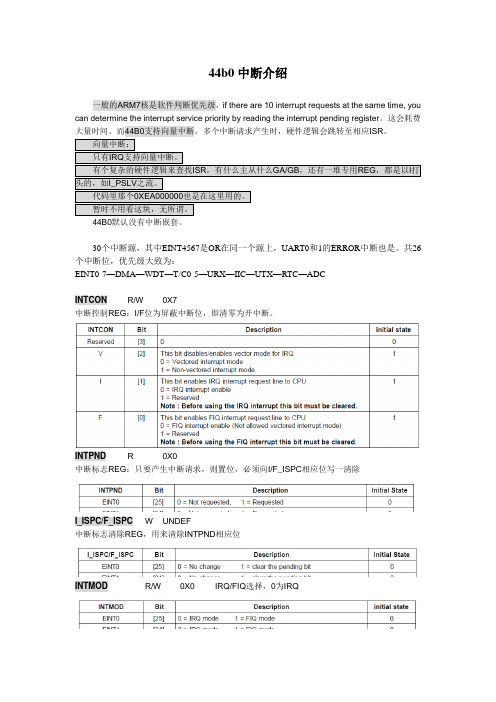
共26个中断位,优先级大致为:EINT0-7—DMA—WDT—T/C0-5—URX—IIC—UTX—RTC—ADCINTCON R/W 0X7中断控制REG:I/F位为屏蔽中断位,即清零为开中断。
INTPND R 0X0中断标志REG:只要产生中断请求,则置位,必须向I/F_ISPC相应位写一清除I_ISPC/F_ISPC W UNDEF中断标志清除REG,用来清除INTPND相应位INTMOD R/W 0X0 IRQ/FIQ选择,0为IRQINTMSK R/W 0X7FFFFFF中断屏蔽REG:1为屏蔽中断,0则中断可用,最高位为GLOBAL位当INTMSK在ISR中置位且向量中断,则INTMSK不会屏蔽已在INTPND中置位的向量。
(bug)应先清除INTPND再置位INTMSK。
I_ISPR R 0X0指示正在被处理的中断,即使INTPND中多个标志位置位,I_ISPR也只有一个位会置位EXTINT R/W 0X0外部中断控制REG:决定每个EINT的触发方式和触发极性,每个EINT占三位,各5种配置方式每个EINT引脚都有数字滤波器,所以大于3时钟周期的信号会被识别。
EXTINTPND R/W 0X0外部中断4567标志REG:指示哪个EINT发生。
必须在ISR中写一清除(R/W?)外部中断4567,非向量模式的配置一、配置寄存器rINTCON = 0x5 ; //无向量中断模式rINTMOD = 0x0 ; //All=IRQ moderPCONG = rPCONG | ( 0xff << 8 ); //EINT7~4rPUPG = rPUPG & (~(0xf << 4)) ; //pull up resister is enablerEXTINT = rEXTINT & (~(0xffff << 16)) ; //EINT4567低电平触发中断pISR_EINT4567 = (unsigned)Key_Interrupt ; //将中断isr地址放入ISR区rINTMSK = ~( BIT_GLOBAL | BIT_EINT4567 ) ; //start INT//#define BIT_GLOBAL (0x1<<26)//#define BIT_EINT4567 (0x1<<21)二、ISR格式为void __irq Key_Interrupt(void)__irq的作用是自动作现场环境保护处理,而且它的处理是不支持中断嵌套的。
ARM 的异常处理学习笔记
ARM 的异常处理学习笔记和优先级。
而S3C44B0 中集成的中断控制器提供了一种更为快速有效的中断响应方式:矢量中断利用中断控制器的硬件方式直接提供对中断服务的快速响应:当多重中断请求信号发生时,由硬件优先级判定逻辑确定哪个中断请求将被响应,同时硬件逻辑还利用向量表中的跳转指令使CPU 直接跳转到相应的中断服务程序入口出。
这样在很大程度上减小了中断响应的延迟。
那么在程序设计上,就需要我们在矢量中断表中对应的地址上放置各个中断请求对应的服务程序入口地址,如:VECTOR_BRANCH: ldr pc,=HandlerEINT0 /*0x00000020*/ ldr pc,=HandlerEINT1 /*0x00000024*/ ldr pc,=HandlerEINT2 /*0x00000028*/ ldr pc,=HandlerEINT3 /*0x0000002C*/ ldr pc,=HandlerEINT4567 /*0x00000030*/ ldr pc,=HandlerTICK /*0x00000034 */ b . b . ldr pc,=HandlerZDMA0 /*0x00000040*/ ldr pc,=HandlerZDMA1 /*0x00000044*/ 6、中断向量表mcu16/embed/arm/arm593.htm a、中断向量表指定了个异常中断及其处理程序的对应关系。
他通常存放在存储地址的低端。
在ARM 体系中,异常中断向量表的大小为32 字节,其中每个异常中断占据4 个字节大小,保留了4 个字节空间。
b、每个异常中断对应的中断向量表中的4 个字节的空间中存放了一个跳转指令或者一个向PC 寄存器中赋值的数据访问指令。
通过这两种指令,程序将跳转到相应的异常中断处理程序处执行。
c、当几个异常中断同时发生时,系统并不能按照一定的次序来处理这些异常中断,例如:当FIQ、IRQ 和第三个其他中断同时发生,FIQ 比IRQ 优先级高,IRQ 会忽略,直到FIQ 返回到用户代码为止。
arm7外部中断简要分析
对《深入浅出arm7lpc》的中断例子进行修改后的运行情况外部中断唤醒功能执行中断程序(取中断程序与等待中断程序部分)为了便于观察,我把原理图中的蜂鸣器换成了led灯,源程序请查看《深入浅出arm7lpc》1。
源程序(唤醒不执行中断)while(1){PCONP = 0x00;PCON = 0x02;if((IO0SET&BEEP) == 0)IO0SET = BEEP;elseIO0CLR = BEEP;EXTINT = 0x01;}运行情况:按键按下,灯亮一下,就灭掉分析:按键后唤醒芯片,执行灯亮,然后清中断标志,然后再次掉电,灯灭注释掉EXTINT = 0x01; 运行情况一样,说明没使能中断的情况下,中断标志不影响IRQEnable();2。
原程序(唤醒+执行中断)void __irq IRQ_Eint0(void){while((EXTINT&0x01)!=0){EXTINT = 0x01;}VICVectAddr=0;}while(1){PCONP = 0x00;PCON = 0x02;if ((IO0SET & BEEP) == 0)IO0SET = BEEP;elseIO0CLR = BEEP;// EXTINT = 0x01;}运行情况:按键,led灯亮,再按键,led灯灭修改1.void __irq IRQ_Eint0(void){if ((IO0SET & BEEP) == 0)IO0SET = BEEP;elseIO0CLR = BEEP;// EXTINT = 0x01;VICVectAddr=0;}while(1){PCONP = 0x00;PCON = 0x02;}运行情况:原来灯灭,按键后灯闪烁,再按键没反应,保持闪烁分析:中断程序中没清中断标志,使一直响应中断修改2。
void __irq IRQ_Eint0(void){if ((IO0SET & BEEP) == 0)IO0SET = BEEP;elseIO0CLR = BEEP;EXTINT = 0x01;VICVectAddr=0;}while(1){PCONP = 0x00;PCON = 0x02;}运行情况:原来灯灭,按住键,灯闪烁,松手,灯保持松手前最后状态(加上按键去抖动,也许无法解决,这是根据电平变化响应中断)修改3。
单片机ARM7 第4章-6-外部中断

上升沿
VIC
注意:这里仅以EINT0为例来进行讲解,EINT1~EINT3与之类似,此处不再重复.
4.10 外部中断输入
电平中断设置
LPC2000系列ARM的电平中断可以设置为高电平触发和 低电平触发. 当EXTPOLAR[0] = 0时,外部中断0设置为低电平触发. 当EXTPOLAR[0] = 1时,外部中断0设置为高电平触发.
VICVectAddr0 VICIntEnable[14] EINT0 通道14 VICIntSelect[14] IRQ FIQ VICVectCntl0 IRQ 通道 VICVectAddr15 分配 VICVectCntl15 VICDefVectAddr 向量IRQ通道15 非向量IRQ通道 向量IRQ通道0
VICVectAddr0 VICIntEnable[14] EINT0 通道14 VICIntSelect[14] IRQ FIQ VICVectCntl0 IRQ 通道 VICVectAddr15 分配 VICVectCntl15 VICDefVectAddr 向量IRQ通道15 非向量IRQ通道 向量IRQ通道0
VIC
注意:这里仅以EINT0为例来进行讲解,EINT1~EINT3与之类似,此处不再重复.
4.10 外部中断输入
边沿中断设置
LPC2000系列ARM的边沿中断可以设置为上升沿触发和 下降沿触发. 当EXTPOLAR[0] = 0时,外部中断0设置为下降沿触发. 当EXTPOLAR[0] = 1时,外部中断0设置为上升沿触发.
外部中断 方式控制
EXTMODE
掉电 唤醒控制 4 中断标志
EXTINT
CPU 其它部件
寄存器汇总
中断信号波形与设置方式 外部中断标志寄存器(EXTINT): 外部中断唤醒寄存器(EXTWAKE): 外部中断极性控制寄存器(EXTPOLAR): 外部中断方式控制寄存器(EXTMODE):
学习小结--ARM7中断原理
2
3 向量地址寄存器 0-15(VICVectAddr0-15 - 0xFFFFF100-13C,读/写)
一般(以 Slot0 为例):VICVectAddr0 = (uint32)IRQ_TIME0 ;
4 向量地址寄存器(VICVectAddr - 0xFFFFF030,读/写) VICVectAddr = 0x00; // 通知 VIC 中断处理结束
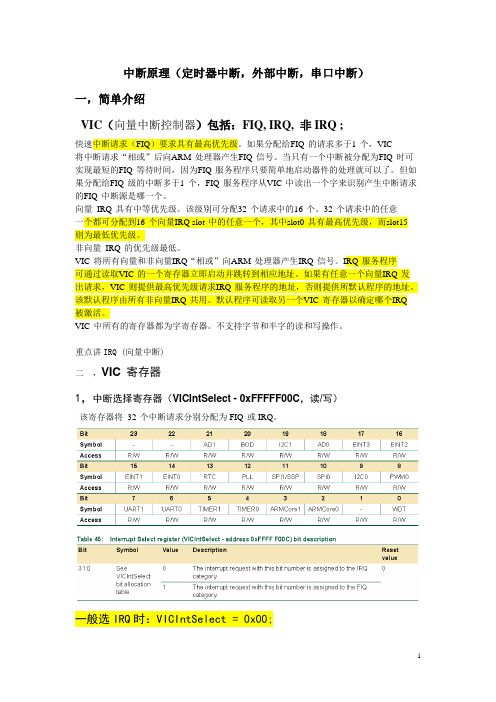
二 ,VIC 寄存器 1,中断选择寄存器(VICIntSelect - 0xFFFFF00C,读/写)
该寄存器将 32 个中断请求分别分配为 FIQ 或 IRQ。
一般选 IRQ 时:VICIntSelect = 0x00;
1
2,向量控制寄存器 0-15(VICVectCnt l0-15 - 0xFFFFF200-23C,读/写)
PINSEL0 = 0x00000000; // 设置管脚连接 GPIO IO1DIR = LED1|LED2; // 设置 I/O 为输出 IO1SET = LED1|LED2; Time1Init(); // 初始化定时器及使能中断 Time0Init(); VICIntSelect = 0x00; // 所有中断通道设置为 IRQ 中断 VICDefVectAddr = (uint32)nIRQ_TIME; VICIntEnable = time0|time1; while(1); // 等待定时器中断或定时器匹配输出 return(0); }
}
} /**************************************************************************** * 名 称:Time0Init() * 功 能:初始化定时器,定时时间为 S,并使能中断。 * 入口参数:无 * 出口参数:无 ****************************************************************************/ void Time1Init(void) {
ARM7中断

AREA vectors,CODE,READONLY
ENTRY
;interrupt vectors
;中断向量表
Vector_Init_Block
LDR PC, Reset_Addr
LDR PC, Undefined_Addr
IO0SET = BEEPCON;
}
else
{
IO0CLR = BEEPCON;
}
T0IR = 0x01; // 清除中断标志
VICVectAddr = 0x00; // 通知VIC中断处理结束
向量IRQ(Vector IRQ)是指向量中断请求(Vector Interrupt ReQuest)。具有次高优先级。
非向量IRQ(NO_Vector IRQ)是指非向量中断请求。具有最低优先级。
5.2.1 向量中断与非向量中断的区别
向量,即指有方向的量。这里所说的方向就是向量地址。
VICVectAddr0 = (uint32)IRQ_Time0; // 设置中断服务程序地址向量
VICIntEnable = 0x00000010; // 使能定时器中断
}
/****************************************************************************
/****************************************************************************
* 名 称:IRQ_Time0()
* 功 能:定时器中断服务程序,取反BEEPCON控制口。
单片机外部中断讲解
单片机外部中断讲解在单片机的世界里,外部中断就像是一位“紧急事务专员”,能够在关键时刻打断单片机正在进行的工作,让其优先处理更为重要和紧急的任务。
这一特性使得单片机在应对复杂多变的外部环境时变得更加灵活和高效。
首先,咱们来理解一下什么是外部中断。
简单来说,外部中断就是单片机从外部接收的一种信号,这个信号告诉单片机:“嘿,有重要的事情发生啦,你得马上停下来处理!”这个信号可以来自各种各样的外部设备,比如按键、传感器等等。
那么,单片机是如何感知到这些外部中断信号的呢?这就涉及到单片机的引脚配置。
通常,单片机都会有专门的引脚用于接收外部中断信号。
当外部设备产生中断信号并通过这些引脚输入到单片机时,单片机会立即响应。
外部中断有它自己的触发方式,常见的有边沿触发和电平触发。
边沿触发就像是一个瞬间的“脉冲”,可以是上升沿触发(也就是从低电平变为高电平的那一瞬间),也可以是下降沿触发(从高电平变为低电平的瞬间)。
而电平触发呢,则是根据引脚的高电平或者低电平状态来触发中断。
比如说,设置为高电平触发,那么只要引脚保持高电平,就会一直触发中断。
为了更好地管理外部中断,单片机一般都会有相应的中断控制寄存器。
通过对这些寄存器的配置,我们可以决定是否允许某个外部中断、选择触发方式、设置中断的优先级等等。
接下来,咱们说说外部中断的优先级。
想象一下,如果同时有多个外部中断信号来了,单片机该先处理谁呢?这就需要靠优先级来决定。
优先级高的中断会先得到处理,处理完后再去处理优先级低的中断。
在实际编程中,使用外部中断需要经过一系列的步骤。
首先,要对单片机进行初始化,包括设置中断相关的寄存器。
然后,编写中断服务函数。
这个函数就是单片机在响应中断后要执行的具体任务。
比如说,我们有一个基于单片机的温度监测系统,使用了一个温度传感器。
当温度超过设定的阈值时,传感器会给单片机发送一个外部中断信号。
在中断服务函数里,单片机可能会执行报警操作,比如点亮一个指示灯或者发出声音警报。
S3C44B0X 调试笔记
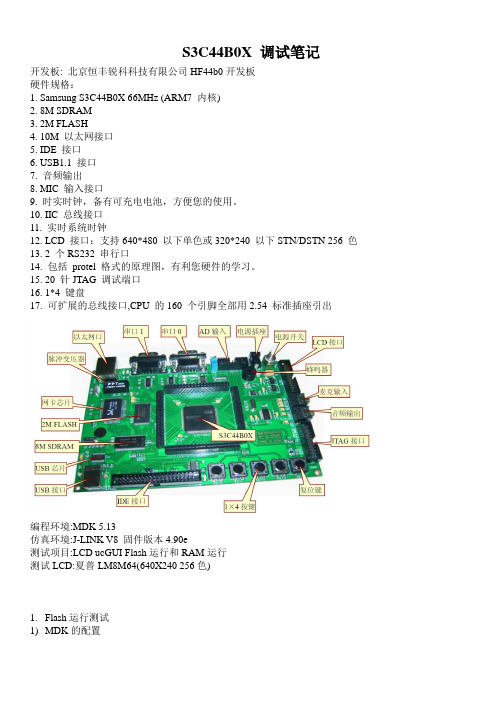
S3C44B0X 调试笔记开发板:北京恒丰锐科科技有限公司HF44b0开发板硬件规格:1. Samsung S3C44B0X 66MHz (ARM7 内核)2. 8M SDRAM3. 2M FLASH4. 10M 以太网接口5. IDE 接口6. USB1.1 接口7. 音频输出8. MIC 输入接口9. 时实时钟,备有可充电电池,方便您的使用。
10. IIC 总线接口11. 实时系统时钟12. LCD 接口:支持640*480 以下单色或320*240 以下STN/DSTN 256 色13. 2 个RS232 串行口14. 包括protel 格式的原理图,有利您硬件的学习。
15. 20 针JTAG 调试端口16. 1*4 键盘17. 可扩展的总线接口,CPU 的160 个引脚全部用2.54 标准插座引出编程环境:MDK 5.13仿真环境:J-LINK V8 固件版本4.90e测试项目:LCD ucGUI Flash运行和RAM运行测试LCD:夏普LM8M64(640X240 256色)1.Flash运行测试1)MDK的配置/******************************************************************************/ /* FLASH.INI: Flash Initialization File *//******************************************************************************/ /* This file is part of the uVision/ARM development tools. *//* Copyright (c) 2005-2006 Keil Software. All rights reserved. *//* This software may only be used under the terms of a valid, current, *//* end user licence from KEIL for a compatible version of KEIL software *//* development tools. Nothing else gives you the right to use this software. *//******************************************************************************/_WDWORD(0x01D30000, 0x00000000); // WTCON: Disable Watchdog_WDWORD(0x01C00000, 0x00000001); // SYSCFG: Disable Cache这里选择Flash的型号是AM29F160DB,实际型号是AM29LV160DB,但实际也好用.2.Flash运行测试1)MDK的配置//*** <<< Use Configuration !disalbe! Wizard in Context Menu >>> ***FUNC void Setup (void){_WWORD (0x1c00000, 0x00000008); //System Configuration SYSCFG_WWORD (0x01C80000, 0x11119102); //Bus Width & Wait Status Control BWSCON_WWORD (0x01C80004, 0x00000600);_WWORD (0x01C80008, 0x00007FFC);_WWORD (0x01C8000C, 0x00007FFC);_WWORD (0x01C80010, 0x00007FFC);_WWORD (0x01C80014, 0x00007FFC);_WWORD (0x01C80018, 0x00007FFC);_WWORD (0x01C8001C, 0x00018000);_WWORD (0x01C80020, 0x00018000);_WWORD (0x01C80024, 0x00860459);_WWORD (0x01C80028, 0x00000010);_WWORD (0x01C8002C, 0x00000020);_WWORD (0x01C80030, 0x00000020);// <o> Program Entry Pointpc = 0x0C001000;}//map 0x01c00000, 0x02000000 read writeLOAD ./RAM/Hello.axf INCREMENTALSetup(); // Setup for Running帮用户解决空间不够时候看的一个资料,【转】过来整理一下供大家参考:RealView MDK具有强大的编译、链接功能。
44B0 中断分析

44B0 中断分析(一)首先ARM 芯片要中断设置要使能中断向量,然后当有IRQ 中断来之后,CPU自动的到0x18地址处取指。
0x18处的指令呢是CPU 根据中断源算好的(比如:中断EINT4567 来了,那么0x18 处的指令就是跳转到地址0x30 处)。
然后就执行“ldr pc,=HandlerEINT4567”这条指令。
这条指令的执行结果就是跳转到“HandlerEINT4567 HANDLER HandleEINT4567”处执行。
这条是宏指令,你可以看一下宏定义。
执行结果就是跳转到HandleEINT4567 处执行。
那么HandleEINT4567 处又是什么指令呢?这就要联系44b.h 文件的#define pISR_EINT4567 (*(unsigned *)(_ISR_STARTADDRESS+0x74)) 定义看了。
HandleEINT4567 处的地址就是“_ISR_STARTADDRESS+0x74”。
到此还不知道这个地址对应的指令是什么。
这时候就要去看Target.c文件的中断初始化了,其中pISR_EINT4567= (unsigned) OSEINT4567ISR;这条语句就解释了中断去向何处。
OSEINT4567ISR 就是在OS_CPU_A.s 里面定义的中断处理程序了。
一、关于44B0中断系统44B0 中断系统中有两张中断转移表,经过二重转移才跳到中断处理程序。
第一张中断向量表由硬件决定,所在区域为ROM(flash),地址空间从0X00开始,其中0X00-0X1C为异常向量入口地址,0X20-0XC0为中断向量入口地址。
另一张中断向量表在RAM 中,可以随便改,其位置在程序连接后才定。
二、如何从第一张中断向量表跳到第二张中断向量表由于RAM 放在地址空间的高端(距离中断向量超过了32M),故在第一张中断向量表对应位置上写上ldr PC,# interrupt_service如:ldr PC,=HandlerEINT4567三、如何在启动程序中设置异常向量,中断向量表如何把C 语言中的一个中断函数对应到汇编的中断向量表中,示意图及举例如下:#define _ISR_STARTADDRESS 0xc7fff00 //GCS6:16M bit DRAM/SDRAM#define pISR_EINT4567 (*(unsigned *)(_ISR_STARTADDRESS+0x74)).macro HANDLER HandleLabelsub sp, sp, #4stmfd sp!, {r0}ldr r0,=\HandleLabelldr r0, [r0]str r0, [sp,# 4]ldmfd sp!, {r0,pc}.endm.textENTRY:b ResetHandler ……VECTOR_BRANCH:ldr pc,=HandlerEINT0 ……ldr pc,=HandlerEINT4567 /* 0x30 */HandlerEINT4567:HANDLER HandleEINT4567.equ HandleEINT4567, _ISR_STARTADDRESS+4*29把C语言中的一个中断函数对应到汇编的中断向量表中pISR_EINT4567 = (int)Eint4567Isr;其实异常向量就是中断向量,ARM7的内核实际上只有8个(1个保留)异常向量,对于众多的中断源,ARM7 的内核是通过IRQ、FRQ 的软件查询中断状态寄存器的位来获得ISR 的起始地址。
5_4_ARM7的中断介绍

保留
000
操作模式
0=Round Robin 1
1=Fix Mode
从操作模式
0=Round Robin 111
1=Fix Mode
确定4个主单元的 优先级
0x1B
当前IRQ主群优先级寄存器I_CMST
表示从群中各中断源当前的优先级
位 位名称
描述
初始值
[15:14] reserved 保留
0
对应分支机 [13:8] VECTOR 器代码的低6 不确定
[ 10 ]
外部中断3
[ 22 ] 定时器4中断
[9]
外部中断4/5/6/7
[ 21 ] 定时器5中断
[8]
RTC时间片中断
[ 20 ] UART0接收中断
[7]
ZDMA0中断
[ 19 ] UART1接收中断
[6]
ZDMA1中断
[ 18 ] IIC-中断
[5]
BDMA0中断
[ 17 ] SIO-中断
-------中断优先级产生模块
中断优先级产生模块包含5 个单元:1个主单元和4个辅单元。 每个辅单元管理6个中断源。主 单元管理4个辅单元和2个中断源。
中断优先级
FIQ>IRQ 若处于不同主群,主群的优先级高的则高 若处于相同主群,优先级高的则高 sGA,sGB,sGC,sGD的优先级高于mGKA,mGKB sGA,sGB,sGC,sGD的优先级是可编程的,
中断管理寄存器
INTCON Reserved
位
3
-------中断控制寄存器
V
I
F
2
1
0
中断管理寄存器
INTCON Reserved
蓝桥杯单片机外部中断的基本操作
一、引言在单片机的学习和应用中,外部中断是一个非常重要的功能。
蓝桥杯单片机外部中断的基本操作,对于单片机编程的初学者来说是一个重要的知识点。
本文将从蓝桥杯单片机外部中断的定义、原理、具体操作以及个人观点等方面进行全面的介绍和讨论。
二、蓝桥杯单片机外部中断的定义和原理蓝桥杯单片机外部中断是指当单片机在执行程序时,外部的某个事件(比如按键触发、传感器检测等)发生时,可以通过中断的方式及时通知单片机,使单片机停止当前的工作,转而去处理这个事件,处理完成后再返回原来的工作。
外部中断的原理是通过单片机的外部中断引脚,当引脚的电平变化时,让单片机执行相应的中断服务程序。
三、蓝桥杯单片机外部中断的具体操作1. 设置外部中断引脚:首先需要配置单片机的外部中断引脚,使其能够检测到外部事件的变化。
2. 初始化外部中断:在程序中需要对外部中断进行初始化,包括中断触发方式(上升沿触发、下降沿触发等)、中断服务程序的位置区域等。
3. 编写中断服务程序:针对不同的外部事件,编写相应的中断服务程序,确保可以及时响应外部中断。
4. 开启外部中断:在程序运行过程中,需要开启外部中断功能,以便单片机能够正常地接收外部中断请求。
四、个人观点和理解对于蓝桥杯单片机外部中断的基本操作,我认为非常重要且实用。
通过外部中断,单片机可以更加灵活地响应外部事件,提高系统的实时性和可靠性。
在实际的项目开发中,合理地运用外部中断能够有效地简化系统的设计,并提高系统的整体性能。
五、总结蓝桥杯单片机外部中断的基本操作对于单片机编程的学习和应用具有重要的意义。
通过本文的介绍,我们对外部中断的定义、原理、具体操作以及个人观点有了更深入的了解。
希望能够在今后的学习和实践中,充分利用外部中断这一功能,提高单片机系统的性能和可靠性。
六、结语通过本文的介绍,相信读者对蓝桥杯单片机外部中断的基本操作有了更深入的了解。
希望读者在今后的学习和实践中,能够充分利用这一功能,提高单片机系统的性能和可靠性。
44B0中断分析(二)
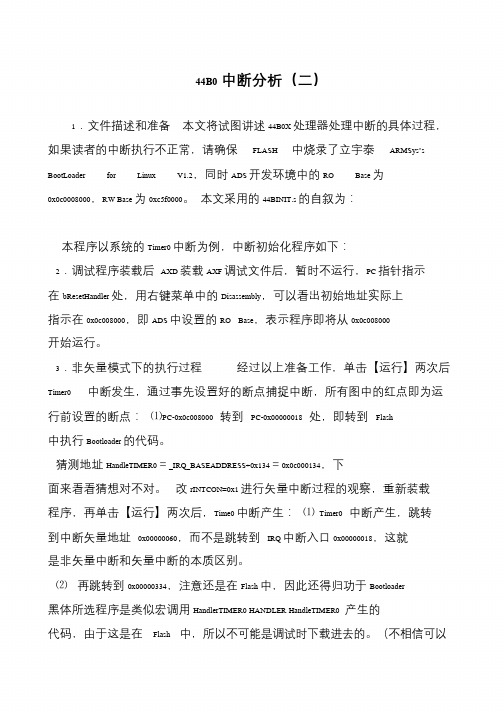
44B0中断分析(二)1.文件描述和准备本文将试图讲述44B0X 处理器处理中断的具体过程,如果读者的中断执行不正常,请确保FLASH 中烧录了立宇泰ARMSys’s BootLoader for Linux V1.2,同时ADS 开发环境中的RO Base 为0x0c0008000,RW Base 为0xc5f0000。
本文采用的44BINIT.s 的自叙为:本程序以系统的Timer0 中断为例,中断初始化程序如下:2.调试程序装载后AXD 装载AXF 调试文件后,暂时不运行,PC 指针指示在bResetHandler 处,用右键菜单中的Disassembly,可以看出初始地址实际上指示在0x0c008000,即ADS 中设置的RO Base,表示程序即将从0x0c008000 开始运行。
3.非矢量模式下的执行过程经过以上准备工作,单击【运行】两次后Timer0 中断发生,通过事先设置好的断点捕捉中断,所有图中的红点即为运行前设置的断点:⑴PC-0x0c008000 转到PC-0x00000018 处,即转到Flash 中执行Bootloader 的代码。
猜测地址HandleTIMER0=_IRQ_BASEADDRESS+0x134=0x0c000134,下面来看看猜想对不对。
改rINTCON=0x1 进行矢量中断过程的观察,重新装载程序,再单击【运行】两次后,Time0 中断产生:⑴Timer0 中断产生,跳转到中断矢量地址0x00000060,而不是跳转到IRQ 中断入口0x00000018,这就是非矢量中断和矢量中断的本质区别。
⑵再跳转到0x00000334,注意还是在Flash 中,因此还得归功于Bootloader 黑体所选程序是类似宏调用HandlerTIMER0 HANDLER HandleTIMER0 产生的代码,由于这是在Flash 中,所以不可能是调试时下载进去的。
(不相信可以。
arm外部中断笔记
1、ARM中断有两种类型FIQ和IRQ
FIQ---快速中断
IRQ---一般中断
我们是可以将一个中断源设置为FIQ也可以设置成IRQ,一般我们都是使用IRQ,在嵌入式linux是不支持FIQ。中断源默认的也是IRQ。
2、IRQ总的开关
通过CPSR中的I位控制IRQ的开关。
一般我们只能将一个中断源设置成FIQ,这个中断源是最紧急需要处理的。
VIC0VECTADDR16=(unsigned int )eint16_31_isr;
2、当EINT16有效,则开始响应EINT16,这时硬件会自动将VIC0VECTADDR16的内容copy到VIC0ADDRESS寄存器中。
3、在将VIC0ADDRESS的值给PC,这样就跳到eint16_31_isr()处理该中断。
if(EXT_INT_2_PEND & (1<<1))//EINT17
{
GPJ2DAT ^= (1<<1);//toggle
// clear pending bit
EXT_INT_2_PEND = 1<<1;
// clear VIC0ADDRESS
intc_clearvectaddr();
}
#endif
intc_setvectaddr(NUM_EINT16_31, isr_key);
//unmasked EINT16
EXT_INT_2_MASK &= ~(1<<0);
//enable EINT16_31
intc_enable(NUM_EINT16_31);
while (1);
}
2、中断处理程序
05实验五 ARM的中断实验
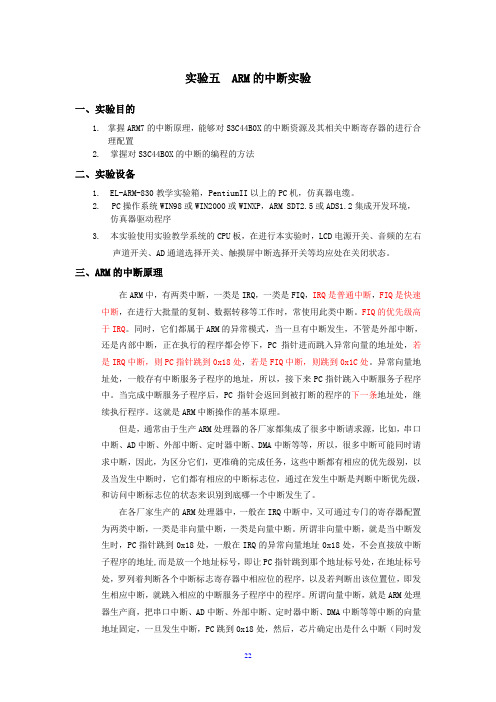
实验五 ARM的中断实验一、实验目的1.掌握ARM7的中断原理,能够对S3C44B0X的中断资源及其相关中断寄存器的进行合理配置2. 掌握对S3C44B0X的中断的编程的方法二、实验设备1. EL-ARM-830教学实验箱,PentiumII以上的PC机,仿真器电缆。
2. PC操作系统WIN98或WIN2000或WINXP,ARM SDT2.5或ADS1.2集成开发环境,仿真器驱动程序3. 本实验使用实验教学系统的CPU板,在进行本实验时,LCD电源开关、音频的左右声道开关、AD通道选择开关、触摸屏中断选择开关等均应处在关闭状态。
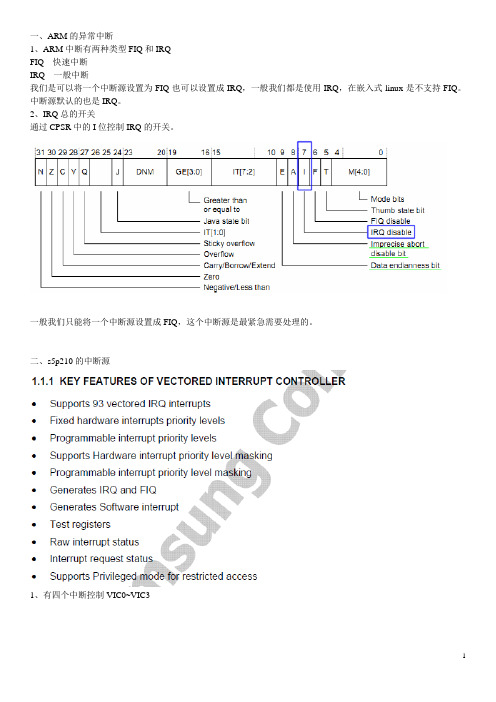
三、ARM的中断原理在ARM中,有两类中断,一类是IRQ,一类是FIQ,IRQ是普通中断,FIQ是快速中断,在进行大批量的复制、数据转移等工作时,常使用此类中断。
FIQ的优先级高于IRQ。
同时,它们都属于ARM的异常模式,当一旦有中断发生,不管是外部中断,还是内部中断,正在执行的程序都会停下,PC指针进而跳入异常向量的地址处,若是IRQ中断,则PC指针跳到0x18处,若是FIQ中断,则跳到0x1C处。
异常向量地址处,一般存有中断服务子程序的地址,所以,接下来PC指针跳入中断服务子程序中。
当完成中断服务子程序后,PC指针会返回到被打断的程序的下一条地址处,继续执行程序。
这就是ARM中断操作的基本原理。
但是,通常由于生产ARM处理器的各厂家都集成了很多中断请求源,比如,串口中断、AD中断、外部中断、定时器中断、DMA中断等等,所以,很多中断可能同时请求中断,因此,为区分它们,更准确的完成任务,这些中断都有相应的优先级别,以及当发生中断时,它们都有相应的中断标志位,通过在发生中断是判断中断优先级,和访问中断标志位的状态来识别到底哪一个中断发生了。
在各厂家生产的ARM处理器中,一般在IRQ中断中,又可通过专门的寄存器配置为两类中断,一类是非向量中断,一类是向量中断。
所谓非向量中断,就是当中断发生时,PC指针跳到0x18处,一般在IRQ的异常向量地址0x18处,不会直接放中断子程序的地址,而是放一个地址标号,即让PC指针跳到那个地址标号处,在地址标号处,罗列着判断各个中断标志寄存器中相应位的程序,以及若判断出该位置位,即发生相应中断,就跳入相应的中断服务子程序中的程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ARM7(sc44b0)外部中断笔记
对于sc44b0它也是一种单片机,一种比较高级的单片机而已,所以他也跟51单片机一样有外部中断,不同51单片机的是,他有8个外部中断源,对应的是8个管脚,(51只有两个,int0和int1,P3.3和P3.4),分别是Port G八个管脚。
而对于外部中断4 \5\6\7很多都是共用寄存器,他们是通过或逻辑公用一个中断请求线。
下面就具体来说说使用外部中断的一些必要的配置。
一,对管脚的配置,因为Port G有三种功能用法,要通过对rPCONG(端口G
配置寄存器)的配置来选用Port G
的外部中断的功能。
其配置表如下
所以应该将其配置为11(设置为中断功能状态);
二,中断模式的选择,中断模式有两种,FIQ(快速中断模式)和 IRQ(中断模式)两种,一般没有特殊要求都用IRQ模式即可。
可以通过对中断模式寄存器rINTMOD配置获得。
如表下
三,是否允许中断,即中断使能位。
通过对中断控制寄存器INTCON的配置即可,如表下通过对中断控制寄存器的配置即可,
可以看出只要让intcon的【1】位置零即可使中断使能。
四,外部中断方式的选择,低电平或上升沿触发呢,还是别的,这就要对外部中断方式寄存器(EXTINT)的配置,其表如下
由上表可知,如果要用下降沿触发,就可将EXTINT 的值给0x22222222;
将所有的外部中断都设置为下降沿触发。
五,当中断捕抓到以后,要引起什么变化呢?或者说用什么来捕抓呢?在sc44b0中用了两个寄存器来捕抓,一个中断挂起寄存器(INTPND),和外部中断挂起寄存器(EXINTPND),一开始不明白挂起是什么意思,后来才懂,差不多就相当与51单片机的标志位一样,当中断发生后,就将挂起寄存器的对应的某一位置一或置零,外部中断挂起寄存器如表下
中断挂起寄存器:当中断产生后,是将INTPND的【21】位置一的;
所以,判断有无外部中断,就可以通过读取挂起寄存器对应的为,即可知道是否有无中断。
六,当中断发生后,挂起寄存器的对应位(即中断标志位)也发生了置位,那如果要检测下一个中断,就得将挂起寄存器的对应为复原,那怎么复原呢?在51单片机中是将中断标志位软件置零就可,在44b0中也是同样的道理,它是通过将对应的中断挂起寄存器的位置一就行了,对于EXTINTPND,他是直接将对应的位置一,对于EXTINTPND是通过将rI_ISPC的对应位置一(EXTINTPND和I_ISP的位数是一样的,两个是相互对应的)
附上程序;
#define EXTINT4 0
#define EXTINT5 1
#define EXTINT6 2
#define EXTINT7 3
#define EXTINT4567 21
#define INTTRIG_LOW 0x00
#define INTTRIG_HIGH 0x01
#define INTTRIG_FALLING 0x02
#define INTTRIG_RISING 0x04
#define INTTRIG_BOTHEDGE 0x05
void KeyLedTest (void)
{
U32 dwVal;
//设置IO 口PORT G
rPCONG |= 0xff00;//设置GP4--GP7为中断输入脚配置11的时候为中断输入脚
//设置中断
rINTMOD &= ~MASK_BIT(21);//中断模式寄存器即设置为快速中断或普通中断mo
//rINTMOD &= ~MASK_BIT(21)作用是让rINTCON的21位置零
//0是IRQ是指中断模式,1是FIR是指快速中断模式 rINTCON &= ~MASK_BIT(1);//INTCON第一位为0表示允许所有中断
//设置EXTINT4,5,6,7中断模式,我们这里使用低电平触发
// rEXTINT &= 0xffff; //先清除EXTINT4,5,6,7的相应设置bit位
// 外部中断寄存器,设置为双边沿触发
for (;;)
{
dwVal = rINTPND;
if ((dwVal & MASK_BIT(21)) == 0)
{
continue;
}
//EXTINTPND 寄存器,判断是哪个外部中断触发
dwVal = rEXTINTPND;//仿真的时候实际上是到这里的时候读取
// rEXTINTPND外部中断挂起寄存器
if ((dwVal & MASK_BIT(EXTINT4)) != 0)//判断rINTPND对应的挂起中断 //寄存器是否为0或1
{
rEXTINTPND |= MASK_BIT(EXTINT4);//絩EXTINTPND 的EXTINT4位置一清 除EXTINTPND 是通过对EXTINTPND 对应的位写1来清除的
//外部中断4 产生了,点亮LED1
sysUtilsLightLed (LED1, TRUE);
printf("LED1 is on;\n");
}
if ((dwVal & MASK_BIT(EXTINT5)) != 0)
{
rEXTINTPND |= MASK_BIT(EXTINT5);
//外部中断4 产生了,点亮LED2
sysUtilsLightLed (LED2, TRUE);
printf("LED2 is on;\n");
}
if ((dwVal & MASK_BIT(EXTINT6)) != 0)
{
rEXTINTPND |= MASK_BIT(EXTINT6);
//外部中断4 产生了,点亮LED3
sysUtilsLightLed (LED3, TRUE);
printf("LED3 is on;\n");
}
if ((dwVal & MASK_BIT(EXTINT7)) != 0)
{
rEXTINTPND |= MASK_BIT(EXTINT7);
//外部中断4 产生了,点亮LED1,2,3
sysUtilsLightLed (LED_ALL, FALSE);
printf("all leds灯 is off;\n");
}
//最后清除中断位
//rI_ISPC |= MASK_BIT(21);
rI_ISPC = dwVal;//对I_ISPC/ F_ISPC写入1,INTPND 将被自动清除 }
}。