路斯特伺服调试过程指导
SERVO GUIDE调试步骤

伺服调试软件(SERVO GUIDE)调试步骤一.设定:1.打开伺服调整软件后,出现以下菜单画面:图1:主菜单2.点击图1的“通信设定”,出现以下菜单。
NC的IP地址检查如下:图3:CNC的IP地址设定电脑的IP地址检查:图4:PC的IP地址设定如果以上设定正确,在测试后还没有显示OK,请检查网线连接是否正确。
图5:NC-PC正确连接对于现在的新笔记本电脑,内置网卡可能自动识别网络信号,如果是这样的,则图5中的耦合器和交叉网线不需要,直接连接就可以了。
二.参数画面:1.点击主菜单(图1)上面的“参数”,如下:图6:参数初始画面点击“在线”,如果正确(NC出于MDI方式,POS画面),则出现下述参数画面,注意,图6下方的CNC型号选择,必须和你正在调试的系统一致,否则所显示的参数号可能和实际的有差别。
2.参数初始画面及系统设定图7:参数系统设定画面参数画面打开后进入“系统设定”画面,该画面的内容不能改动,可以检查该系统的高速高精度功能和加减速功能都有哪些,后面的调整可以针对这些功能修改。
3.轴设定图8:轴设定画面检查一下几项:电机代码是否按HRV3初始化(电机代码大于250)。
电机型号与实际安装的电机是否一致。
放大器(安培数)是否与实际的一致。
检查系统的诊断700#1是否为1(HRV3 OK),如果不为1,则重新初始化伺服参数并检查2013#0=1(所有轴)注:图8的右边的“分离型检测器”对于全闭环系统时候需要设定。
4.加减速一般控制设定如下图所示,设定各个轴在一般控制时候的加减速时间常数和快速移动时间常数。
图9:一般控制的时间常数注意:各个轴的时间常数要设定为相同的数值,使用直线型。
而快速时间常数为铃型,(即图9的T1,T2都需要设定,如果只设定了直线部分T1,则在快速移动时候会产生较大的冲击)。
相关参数(表1) :参数号意义标准值调整方法1610 插补后直线型加减速 1走直线1622 插补后时间常数 50-100走直线1620 快速移动时间常数T1 100-500走直线1621 快速移动时间常数T2 50-2005.AICC/AIAPC控制的时间常数:如果系统有AICC功能(可通过图2检查是否具备)则按照AICC的菜单调整,如果没有AICC功能,则可以通过“AI先行控制”菜单项来调整,参数号及画面基本相同,在这里合在一起介绍(蓝色字体表示AIAPC没有),在实际调试过程中需要注意区别。
伺服调试步骤及注意点
伺服调试步骤和注意点用途:介绍FANUC系统伺服调试的方法及步骤文件使用的限制以及注意事项等文件版本更新的纪录修订日期版本号文件名称修订内容修订人2009年11月 1.0 伺服调试步骤和注意点首次发布徐少华目录1、伺服调试概述 (2)1.1伺服优化的对象 (2)1.2伺服优化的方法 (2)2、手动一键设定one shot (3)2.1、one shot功能介绍 (3)2.2、参数设定支持画面的调用 (3)2.3手动加入滤波器的方法 (5)2.4伺服增益的自动调整 (5)2.5典型加工形状的测试 (7)3、伺服软件自动调整导航器 (8)3.1自动调整导航器介绍 (8)3.2导航器调整具体步骤: (9)4、servo guide手动调整 (14)4.1伺服三个环(电流环、速度环、位置环)调整 (14)4.1.1、电流环的调整:设定HRV控制模式 (14)4.1.2、速度环的调整:合理提高速度环增益(100%~600%) (16)4.1.3、位置环的调整:一步到位设定位置环增益为4000~8000 (27)4.2加减速时间常数的调整 (28)4.2.1加减速时间常数的分类 (28)4.2.2一般控制(不使用高速高精度功能)加减速时间常数的调整 (30)4.2.3高速高精度模式下时间常数的确认 (34)5、典型加工形状调整、检测 (38)5.1圆的调整 (38)5.1.1圆度的调整 (38)5.1.2圆大小调整 (39)5.1.3圆象限的调整 (39)5.2方的调整 (50)5.3、1/4圆弧的调整 (52)1、伺服调试概述1.1伺服优化的对象先来看一下FANUC系统的伺服控制原理框图,从上图,我们可以看出:系统从里至外分为“电流控制(电流环)”、“速度控制(速度环)”、“位置控制(位置环)”。
那么伺服调试的第一重要方面就是三个环在高响应、高刚性下的“和谐”工作,即为:合理提高伺服的增益,又必须保证伺服系统不出现振荡。
德国 LUST IDD操作手册

0-1
IDD3000操作手册
0-2
IDD3000操作手册
1-1
IDD3000操作手册
1-2
IDD3000操作手册
2-1
IDD3000操作手册
2-5
IDD3000操作手册
X1-2
2-9
IDD3000操作手册
3-1
IDD3000 操作手册
3-3
IDD3000操作手册
acc.dec. acc.dec.
3-5
IDD3000操作手册
相应的功能显示在左边按纽上方
1 2
3
45
6
7
8
3-10
IDD3000操作手册
3-11
IDD3000操作手册
3-12
IDD3000操作手册
处于手动控制模式中,门可以手动控制。
只要按下 (关门)和 (开门)两个按纽中
现在可以通过按 (关门)或者 (开门)按纽来控制门了。
门以
如果需要切换回电梯控制模式,则同时按下 , 和 三个按纽。
按下按纽 (模式)两秒钟,即可以手动慢速控制门的运动。
因此
现在可以通过按 (关门)或者 (开门)按纽来控制门了。
如果需要切换回电梯控制模式,则同时按下 , 和 三个按纽。
3-17
IDD3000操作手册
(a)
(b)
(b)
(c)(a)
(d)
A-1IDD3000操作手册。
路斯特DriveManager基本操作PPT教案

CDE驱动器的电机识别
1:软件界面 2:下载和上传驱动器配置文件 3:CDD驱动器的电机识别
4:CDE驱动器的电机识别
5:示波器的应用 6:返回出厂设置 7:下载Firmware
1:软件界面 2:下载和上传驱动器配置文件
3:CDD驱动器的电机识别
4:CDE驱动器的电机识别 5:示波器的应用 6:返回出厂设置 7:下载Firmware
CDD驱动器的电机识别
3.1:驱动器的安装
驱动器需要安装在电气柜里面,背板需要与一个大面积的金属板紧密接 触,这样能够减低干扰,对于大功率的驱动器对抗干扰很有帮助.最好采 用镀锌板(如果确实没有镀锌板,电柜底部是油漆板,要把驱动器的 安装孔附近的油漆刮掉).安装完毕以后,需要保证电气柜里面的温度 不超过60度,通风良好.
电气柜需要接地良好,最好有地桩良好的接地.接地的线要粗,保障机器 的抗干扰能力.
CDD驱动器的电机识别
3.2:电机的动力线
伺服电机到驱动器的动力线有U,V,W和GND四根线.在上电之前,需要 确认电机的外观是否有破损,动力线的连接是否正确,特别是相间对地 是否短路.
需要特别注意的是,1:电机U,V,W三根线必须与驱动器的U,V,W三根线一 一对应.2:GND线必须一头接到电机的接地端子上,一头接到驱动器 的接地端子上(靠近U,V,W接线端子).而且动力线采用屏蔽电缆, 这样会很好的改善现场的EMC环境.LUST配置的电缆均为良好屏蔽.
CDD驱动器的电机识别
3.3:编码器的电缆
编码器的电缆必须采用屏蔽,而且电缆屏蔽层需要接到接头的外壳上 (电机编码器如果是旋变,接A+,A-,B+,B-,Z+,Z-即可.),标准的编码器电缆 是双层屏蔽的,即双绞屏蔽,然后再几股线的外部再加屏蔽.这样能够在 比较恶劣的环境里面增强编码器的抗干扰性.对于需要脉冲给定的场合, 也需要对于对于脉冲线进行屏蔽保护.
教你设置伺服驱动器参数(附故障排查技巧)

教你设置伺服驱动器参数(附故障排查技巧)在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考。
然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
(1)位置比例增益设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
(2)位置前馈增益设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%(3)速度比例增益设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
(4)速度积分时间常数设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
(5)速度反馈滤波因子设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
如果需要较高的速度响应,可以适当减小设定值。
(6)最大输出转矩设置设置伺服驱动器的内部转矩限制值。
设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。
伺服调试步骤(课程200910)讲义

述以外的情况时使用 #0=1: 在全闭环上,使用位置反馈脉冲
数超过”32767”的检测器
设定#0=1时, 用1/10的值进行设定
2020/7/24
BJFANUC LZW
21
初始设定位
43 Model α12/3000i
47 Model α22/3000i
53 Model α30/3000i
57 Model α40/3000i
2020/7/24
BJFANUC LZW
24
i系列伺服电机代码表
BEIJING-FANUC
电机型号 β4/4000is β8/3000is β12/3000is β22/2000is αc4/3000i 电机代码 156(256) 158(258) 172(272) 174(274) 171(271) 电机型号 αc8/2000i αc12/2000i αc22/2000i αc30/1500i α2/5000i 电机代码 176(276) 191(291) 196(296) 201(301) 155(255) 电机型号 α4/4000i α8/3000i α12/3000i α22/3000i α30/3000i 电机代码 173(273) 177(277) 193(293) 197(297) 203(303) 电机型号 α40/3000i α4/5000is α8/4000is α12/4000is α22/4000is 电机代码 207(307) 165(265) 185(285) 188(288) 215(315) 电机型号 α30/4000is α40/4000is α50/3000is α50/3000is α100/2500is 电机代码 218(318) 222(322) 224(324) 225(325)FAN 235(335)
伺服驱动操作与调试

参数组选定后,通过切换 “UP/DOWN”改变参数号
“SET”显示参数内容
1.参数显示
4.1.2 参数的显示与设定
• 防止参数被错误的操作所设定与修改 • 通过PA19设定予以保护
2.参数保护
4.1.2 参数的显示与设定
• PA19设定为000C,操作 “SET”“UP/DOWN”可 修改参数,设定实例见下图
3.偏移的自动调整
在诊断模式下,通过H1的设定生效 偏移自动调整功能。
自动生成
4.转矩控制的快速调整
4.4 驱动器调整
调整模式与功能
手动调整
4.4.1
4.4.2
4.4.3
4.4.4
在线自动调整
自适应调整
4.4.1 调整模式与功能 1.调整模式
通过驱动器自动调整来设定位置、速度调节器及滤波器、陷波器等动态调节参数。 三种调整方式
测试前,先检查,具体见书
4.1.3 驱动器测试
2.点动试运行
驱动器点动试运行:用于驱动器、电机、编码器等基本部件的检 查
MR-J3:可在诊断模式下,选择“TEST1”后进行。
4.1.3 驱动器测试
3.DO强制
DO强制运行:用于外部控制电路连接、动作或PLC程序检查
MR-J3:可在诊断模式下进行。
5-通过PLC/CNC使工作机械在 全程范围内作快速循环运动,进 行负载惯量动态测试与调节器参 数实时更新
4.在线自动调整操作
4.4.3 手动调整
手动调整:对结构特殊、负载变化频繁、无法通过自动调整获得理想响应特性 手动调整与控制方式有关,操作步骤4部分。
1.位置控制方式
需设定参数:PB06、PB07、PB08、PB09、PB10 手动操作步骤见书
伺服驱动器参数设置方法
伺服驱动器参数设置方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
伺服装置的功能调试要点

伺服装置的功能调试要点学习伺服装置的功能调试这么久,今天来说说关键要点。
首先呢,我理解在调试之前得对伺服装置有个基本的了解,就像你要去修一辆车,你得先知道车有哪些零件是干啥的吧。
伺服装置它是用来精确地控制位置、速度啥的。
那这时候就有个困惑了,怎么才算精确呢?我觉得这个精确就是要达到设定的数值,误差特别小。
比如说,就像你让一个机器人手臂去拿东西,你设定它伸到某个坐标位置,那它就得正好到那儿,不能差太多。
在调试功能的时候,参数设置是个大头。
像增益这个参数我总结是很关键的。
但是刚开始我就很迷糊,这个增益到底该设多大呢?如果设得太大,系统可能就不稳定,就好像你走路,步子迈太大容易扯着蛋一样。
要是设得太小呢,又达不到预期的控制效果。
我感觉只能通过不断地尝试去找到一个合适的值。
这时候有个小技巧,可以从小值开始慢慢增加,同时观察系统的响应情况。
对了还有个要点是反馈系统。
伺服装置得知道自己实际运行得咋样,就得靠反馈。
我理解反馈就像你做一件事,得有人告诉你做得对不对。
好比是你投篮,你得看着球有没有进,这就类似反馈。
要是反馈有问题,那整个伺服装置就不可能很好地完成功能调试。
另外,接线绝对不能出错。
这是个很低级但又很容易疏忽的点。
我曾经以为接对线很简单,结果就因为一根线接错了,搞了半天调试出不来结果。
这使得我明白每一步都不能大意。
在学习过程中我也会找一些参考资料,比如相关的专业书籍,《伺服系统原理与实践》这本书就很不错,里面有很多实际的案例可以帮你理解一些概念。
还有就是网上一些技术论坛,你能看到别人遇到的问题和解决方案。
我觉得要记住这些要点呢,就可以自己做个小笔记,把调试的每一步可能遇到的问题,每个参数的作用简单写下来。
等下次调试的时候就先看看这个笔记,这样就更有把握。
总之呢,伺服装置的功能调试需要耐心细致地去对待每一个环节。
est伺服调试
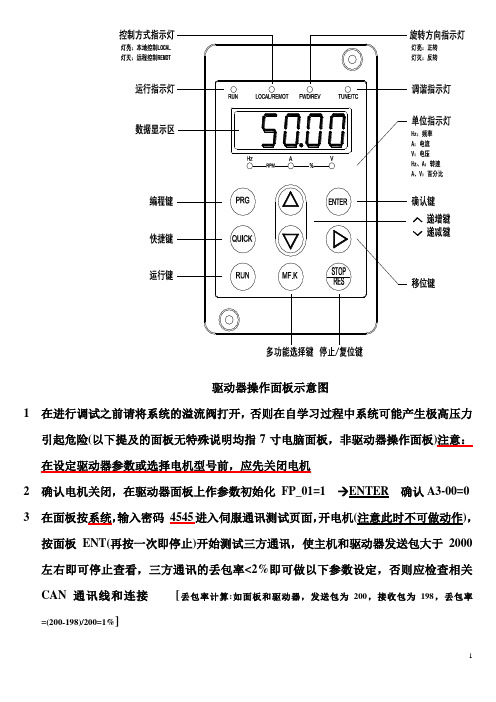
驱动器操作面板示意图1在进行调试之前请将系统的溢流阀打开,否则在自学习过程中系统可能产生极高压力引起危险(以下提及的面板无特殊说明均指7寸电脑面板,非驱动器操作面板)注意:在设定驱动器参数或选择电机型号前,应先关闭电机2确认电机关闭,在驱动器面板上作参数初始化FP_01=1 ENTER 确认A3-00=0 3在面板按系统,输入密码4545进入伺服通讯测试页面,开电机(注意此时不可做动作),按面板ENT(再按一次即停止)开始测试三方通讯,使主机和驱动器发送包大于2000左右即可停止查看,三方通讯的丢包率<2%即可做以下参数设定,否则应检查相关CAN通讯线和连接[丢包率计算:如面板和驱动器,发送包为200,接收包为198,丢包率=(200-198)/200=1%]关闭电机,选择相应电机型号(型号请查看电机铭牌),将伺服页面加速时间和减速时间设为0如电机参数与所选电机型号不一致或者无此电机型号,可确认电机参数后用自定义方式输入4打开电机,在驱动器面板上开始进行电机参数辨识(自学习)F1-16=2 ENTER RUN 如果返回主页面表明辨识成功,关闭电机。
如果显示ERR错误信息,请检查下列项目a)在驱动器面板上核对以下参数是否正确(以电脑面板伺服页面参数为准)F1-00=2F1-01 电机功率F1-04 电机额定频率F1-02 电机额定电压F1-05 电机额定转速F1-03 电机额定电流(输入)F0-10 最大频率F0-12频率上限(F0-10>= F0-12)b)检查以下硬件: 1 PG卡(驱动器编码器线接口板) 2 编码器电缆和电机动力电缆的连接情况 3 电机是否卡住5自学习成功后,在面板上设定转矩上限为50 ,驱动器面板上设定F0-08=10 设定试运转频率(先设定10%)设定完毕后开启电机,按驱动器面板的运行,随时监视驱动器面板的电流,驱动器面板电流显示值可以通过按驱动器面板上的按键来切换到电流项。
路斯特伺服调试过程指导

路斯特伺服调试过程指导伺服系统是一种能够将电机转动动作和位置信息精确控制在要求范围内的系统。
在工业自动化领域,伺服系统被广泛应用于各种精密运动控制的场景中。
然而,在实际应用中,伺服系统往往需要经过调试过程才能达到预期的性能水平。
本文将以路斯特伺服为例,详细介绍伺服调试的过程和步骤。
1.确定系统结构和参数在开始调试之前,需要对伺服系统的结构和参数进行详细了解和确认。
包括了解伺服驱动器和伺服电机的型号和技术参数,选择合适的控制器和编码器等。
2.连接硬件设备将伺服驱动器和控制器等硬件设备按照要求正确连接,确保电源供应和信号传输正常。
3.设置控制器参数根据实际的应用需求和系统特点,设置控制器的相关参数。
这些参数包括速度环和位置环的比例、积分和微分增益等。
4.进行手动模式调试在手动模式下,通过操作控制器的手柄或按键等方式,使电机转动,观察其实际运动情况,逐步调整参数以使其达到预期的效果。
可以通过增大或减小比例增益和积分增益来调节伺服系统的速度和位置响应。
5.进行自动模式调试在自动模式下,通过输入特定的控制命令,观察伺服系统的响应。
可以通过调整速度环和位置环的参数来优化系统的动态性能,并确保伺服系统在不同工况下具有良好的稳定性和快速响应性。
6.系统稳定性测试在调试完成后,进行系统稳定性测试。
通过不同的工况下的控制命令对伺服系统进行测试,观察系统的稳定性和响应时间,以确保系统在实际工作中的可靠性和稳定性。
7.整理调试文档在调试过程中,需要详细记录各个参数的设置和调整过程,以及系统的性能测试结果和问题解决方案。
这些调试文档可以用于系统维护和后续优化工作。
总结起来,伺服调试的过程需要按照系统的特点和要求进行参数设置、手动模式调试、自动模式调试和系统稳定性测试等步骤,并及时记录调试过程和结果。
通过合理的调试过程和方法,可以确保伺服系统达到预期的控制精度、响应速度和稳定性,提高系统的性能和可靠性。
SIEMENS 伺服软件调试
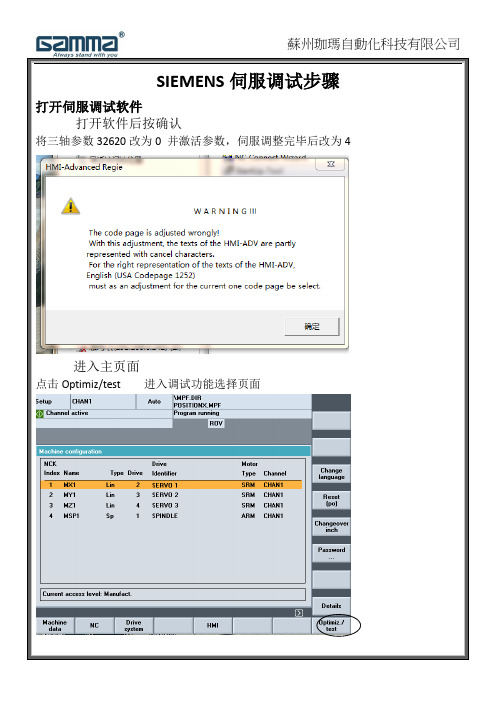
SIEMENS伺服调试步骤打开伺服调试软件打开软件后按确认将三轴参数32620改为0 并激活参数,伺服调整完毕后改为4进入主页面点击Optimiz/test 进入调试功能选择页面点击Speed contr.loop进入速度环调试页面双击active 改成InactiveStart 开始测量按面板循环启动Display查看图形可通过选择X marker 或者Y marker 移动光标查看响应波形数值如有波形较高的点可调整P1460位置环调整双击active 改变为Inactive 点击Measuring parametersStart下方提示Please press NC START按面板循环启动键进入Display电机震动后出现位置环波形波形出现振幅调整参数32200调整位置环增益时需注意X轴[0]、[1]、Y轴[0]、[1] 、Z轴[0]需设相同该参数为插补三轴增益(需依三轴的最小增益值设定该参数)Z轴[1]、主轴[0]、[1] 需设相同此参数为攻丝参数也可从X、Y、Z及主轴选择最小值将四轴均设为相同值调整Trace创建程序Trace_XAA:G53D0;FFWONFFWOF;SOFTBRISKG01X400F10000; 轴的坐标值为各轴常用工作区域G4F0.5X450G4F0.5GOTO AAM30编辑好后运行程序进入Trace选择与程序对应的轴号Start 进入Display进入Scale双击Auto改为fixed选择测量点一般为移动位置的俩个端点之一MAX值为端点值加0.01 MIN值为端点值减0.01 每个值输入后按回车键确认进入Graph1绿线为实际移动波形蓝线为理论波形观察是否有过切震动等过切可在程序中打开FFWON ,SOFT调整参数32810加大时间常数32420设为“1”激活轴向突变限制32431 调整JERK速度自动优化参数调整:自动优化后参数匹配:MD32200[0] 位置环增益参考值MD32800[0] FFW等效时间参考值0.0015刚性攻丝调整:SP MD32200[1] MD32800[1] 参考值0.0015 位置环增益FFW等效时间Z MD32200[1] MD32800[1] 参考值0.0015 位置环增益FFW等效时间SP MD35210[1]位置环模式加速度MD32431[0-4] MD32432[0-4] 两个参数相同最大轴向突变值最大轨迹运动轴向突变值[0] 100 [0] 100 普通加工[1] 100 [1] 100 普通(定位)[2] 100 [2] 100 粗加工CYCLE832[3] 20 [3] 20 半精加工CYCLE832[4] 20 [4] 20 精加工CYCLE83232431 进给轴设置20-100主軸轉矩利用率不高於85%蘇州珈瑪自動化科技有限公司圆弧调整:32500 :“1”摩擦补偿生效32520最大摩擦补偿值32540摩擦补偿时间常数32630 3:速度控制前馈4:转矩控制前馈前馈控制类型。
伺服工程师必备的伺服调试指南
伺服工程师必备的伺服调试指南1 伺服系统的参数调整理论基础伺服系统包括三个反馈回路(位置回路、速度回路以及电流回路)。
最内环回路的反应速度最快,中间环节的反应速度必须高于最外环。
假使未遵守此原则,将会造成震动或反应不良。
伺服驱动器的设计可确保电流回路具备良好的反应效能。
用户只需调整位置回路与速度回路增益。
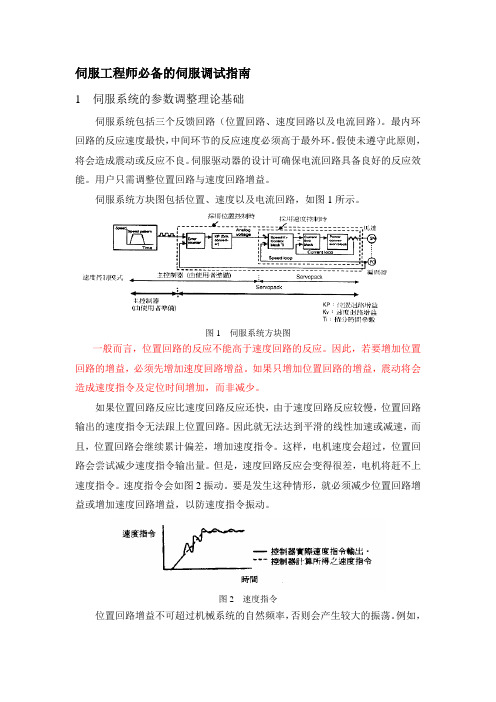
伺服系统方块图包括位置、速度以及电流回路,如图1所示。
图1 伺服系统方块图一般而言,位置回路的反应不能高于速度回路的反应。
因此,若要增加位置回路的增益,必须先增加速度回路增益。
如果只增加位置回路的增益,震动将会造成速度指令及定位时间增加,而非减少。
如果位置回路反应比速度回路反应还快,由于速度回路反应较慢,位置回路输出的速度指令无法跟上位置回路。
因此就无法达到平滑的线性加速或减速,而且,位置回路会继续累计偏差,增加速度指令。
这样,电机速度会超过,位置回路会尝试减少速度指令输出量。
但是,速度回路反应会变得很差,电机将赶不上速度指令。
速度指令会如图2振动。
要是发生这种情形,就必须减少位置回路增益或增加速度回路增益,以防速度指令振动。
图2 速度指令位置回路增益不可超过机械系统的自然频率,否则会产生较大的振荡。
例如,机械系统若是连接机器人,由于机器的机械构造采用减低波动的齿轮,而机械系统的自然频率为10~20Hz ,因此其刚性很低。
此时可将位置回路增益设定为10至20(1/s)。
如果机械构造系统是晶片安装机、IC 黏合机或高精度工具机械,系统的自然频率为70Hz 以上。
因此,可将位置回路增益设定为70(1/s)或更高。
需要很快的反应时,不只是要确保采用的伺服系统(控制器、伺服驱动器、电机以及编码器)的反应,而且也必须确保机械系统具备高刚性。
1.1交流伺服系统相关参数的设定速度回路增益主要用以决定速度回路的反应速度。
在机械系统不震动的前提下,参数设定的值愈大,反应速度就会增加。
如果负载惯量比设定的正确,速度回路增益的值就可以达到预想数值。
现场调试步骤及方法(路斯特变频器)

路斯特变频器尊敬的用户:您好!首先感谢您选择我们路斯特伺服驱动系统!为了方便您的安装、调试和维护工作,使您迅速启动驱动器,投入运行。
我们特依托路斯特专用操作面板KP300编写此手册,具体如下:一.KP300和驱动器的连接a)CDD3000伺服驱动器上(接口X4)b)控制柜的门上。
二.KP300外形及按钮介绍三.操作步骤3.1 操作权限3.3 曳引机参数区域(向曳引机厂家询问)将曳引机的几个参数输入之后,电机自学习之前必须确保以下几个方面:a.曳引机电机接入的三相线的相序是否正确。
b.确认编码器的接线是否正确,严格按照驱动器编码器接线定义连接,编码器接线错误,在进行编码器以及电机学习会造成失败。
c.自学习之前,变频器的使能信号必须有效,抱闸不用打开。
d.确认输入的电机的参数完全正确。
对于同步电机需要输入的参数为:MOVGR(161)、MOCNM(158)、MOMNM(852)、MOSNM(157)、MOFN、MOR_S(842)、MOL_S(851)、MOJNM(160)3.4编码器参数编码器的线数自动保存在驱动器中。
编码器的学习的前提是变频器的使能信号有效,抱闸不用打开。
需要设置的参数是CFENC、ECLNC、ECNPP。
使用KP300可以对编码器OFFSET进行识别,操作方法如附录。
3.5 编码器反馈输出(黑体为需要设置的参数)3.6输入与电梯运行有关的参数关于多段速的说明(详细说明参考CDD用户手册)以下参数在_SRAM目录下以检修速度运行,进行各个参数的调整之后再以正常速度运行。
五.性能优化5.1 启动时轿厢有下坠感可能与此性能相关的情况:电梯机械部分的参数,包括轿厢的重量、绳纶摩擦系数、导靴摩擦系数与电梯设计值差别过大。
5.2整个电梯运行过程振荡5.3高速时有振荡,低速、中速时效果好5.4 低速时有振荡,中速、高速时效果好可能与此相关的参数主要有:5.5 无法达到高速可能与此性能相关的情况:电机学习不准确5.6 随着运行时间的增加,轿厢振荡加剧可能与此性能相关的情况:编码器的机械安装没有固定;编码器定子与曳引机主轴的安装同轴度不好匹配过的曳引机有蓝光、欣达、孚信、阿尔法、梦特纳利、威特(不断完善)附录:同步电机磁场定位步骤1、进入Subject\SCD\MSM\ECOID菜单;2、只给上ENPO(使能)信号,然后按SAVE键进行电机编码器偏置识别;3、请等待编码器识别值识别值在Subject\SCD\ENC\434-ECOFF建议:识别编码器偏置最好识别2~3次,以保证识别正确。
路斯特ServoC系列伺服驱动器简易安装手册

请务必注意,本简要说明书仅作为电子版《ServoC 操作手册》的一个补充,而不是替代。
我们的目的是为了操作者和使用者快速掌握ServoC 伺服系统的安装和第一次投入运行的要点及注意事项。
该说明书仅适用于ServoC 驱动器及LSM 伺服电机,如用户选用第三方电机则必须参考《ServoC 操作手册》。
2重要提示)).主电源(底部)3AC 230 V 或 3AC 400 V外接控制电源1AC 230 V (3AC 230 V 系列 DC 24 V (3AC 400 V 系列电机与制动电阻接线端子操作面板6位7段 LED 显示屏4个调试按键RS485CANOpen 通讯端口(选件)USB 端口用于连接 PC I/O 端子2路模拟输入±10 V 输入(14位A/D 转换)1路模拟输出0-10 V 输出(8位A/D 转换)最大输出电流2 mA 7路数字输入光电隔离正负逻辑可选5路数字输出光电隔离最大输出电流40 mA24 V DC 供电输出(给I/O 端口最大输出电流200 mA )参考电压输出(10.5 V )电机温度传感器接口(PTC )编码器反馈接口标配:既可接旋转变压器,16位分辨率;也可接SinCos 单圈绝对值编码器(SEK ),18位分辨率脉冲输入/编码器仿真输出集电极开路或差分信号输入差分信号输出,Z 相集电极 开路输出允许三种类型的指令脉冲输入, 电子齿轮比:1/50<A/B <50硬件滤波,滤除干扰脉冲X1X5X4X6X7X8伺服驱动器接口示意图安装调试简要说明书1 安装接线说明41633 DriveManager调试说明附录A 总观所有的错误信息2 操作面板及其使用介绍3542总观所有的错误信息 (42)目录1.1 动力接线.......................................................................................41.2 编码器接线.......................................................................................51.3 通讯接口X5....................................................................................71.4 连接PC 和安装调试软件DriveManager ...................................................71.5 主令脉冲接线.................................................................................101.6 控制信号接线.................................................................................131.7 抱闸接线 (15)2.1 使用操作面板手动测试电机步骤.........................................................162.2 控制逻辑流程图..............................................................................192.3 操作面板参数详解 (20)3.1 DriveManager 调试说明 (35)安装调试简要说明书41.1 动力接线X1:电机动力电缆接线,使用菲尼克斯插头(随驱动器附赠)图1.1.1 LSML 电机动力插头X1U 、V 、W 分别对应颜色为:黄橙红(电机尾部甩线),或红棕蓝(路斯特传动制作的延长电缆);应使用带屏蔽动力电缆,屏蔽层双端接地(即接驱动器及电机的PE 端或外壳)并保证最大的接触面积; 为接地:黄绿线图1.1.2 LSMM电机动力插头管脚定义中惯量电机动力插头管脚定义12543中惯量电机动力插头管脚图安装调试简要说明书5X2、X3:驱动器电源接线,使用菲尼克斯插头(随驱动器附赠)图1.1.3 电源接线X2、X31.2 编码器接线图1.2.1 编码器接线(旋转变压器/Resolver )X4:编码器线,插头为15针D 形公头应使用双绞带屏蔽层编码器电缆,Sin-/Sin+为一对双绞线,Cos-/Cos+为一对双绞线,Ref-/Ref+为一对双绞线。
fanuc伺服调试步骤

SERVO GUIDE -1伺服调试的步骤伺服调试的步骤连接设定连接设定1.打开伺服调整软件后,出现以下菜单画面:图1 :主菜单2.点击图1 的“通信设定”,出现以下菜单。
连接设定连接设定图2:通讯设定连接设定连接设定NC 的IP 地址检查如下:图3:CNC的IP地址设定连接设定连接设定电脑的IP 地址检查:图4:PC 的IP 地址设定连接设定连接设定如果以上设定正确,在测试后还没有显示OK,请检查网线连接是否正确。
图5:NC-PC 正确连接连接设定连接设定注意:对于现在的新笔记本电脑,内置网卡可能自动识别网络信号,如果是这样的,则耦合器和交叉网线不需要,直接连接就可以了。
下拉参数页面下拉参数页面1,点击主菜单(图)上面的“参数”,如下:图6:参数初始画面下拉参数页面下拉参数页面点击“在线”,如果正确(NC 出于MDI 方式,POS 画面),则出现下述参数画面。
注意:CNC 型号选择,必须和你正在调试的系统一致,否则所显示的参数号可能和实际的有差别。
下拉参数页面下拉参数页面2,参数初始画面及系统设定图7:参数系统设定画面下拉参数页面下拉参数页面参数画面打开后进入“系统设定”画面,该画面的内容不能改动,可以检查该系统的高速高精度功能和加减速功能都有哪些,后面的调整可以针对这些功能修改。
频率响应测定频率响应测定通过频率响应测量各轴的共振点,并用滤波器参数来抑制共振。
在满足波形要求,保证共振点被抑制的情况下,提高速度环路增益。
图8:频率响应频率响应测定频率响应测定在图形画面,按“工具”-〉“频率响应”,然后按“测量”,选择需要测量的轴(X,Y,Z 等),然后按“开始”就可以自动侧量了。
通过观察上述图形,可以看到共振点的中心频率等,在参数画面上设定。
如下:图9:滤波器设定频率响应测定频率响应测定注意:设定参数时一定要选择相应的轴。
设定完后一定要再测一遍。
图10 加滤波器后的频率响应曲线如果有两个或以上共振点,可以使用多个滤波器来抑制(每个轴有四个滤波器)。
伺服驱动器和变频器调试参数设置
伺服驱动器和变频器调试参数设置随着现代工业自动化的发展,伺服驱动器和变频器在工业生产中的应用越来越广泛。
为了实现稳定的运行和准确的控制,调试参数的设置非常重要。
本文将详细介绍伺服驱动器和变频器的调试参数设置方法。
一、伺服驱动器的参数设置1.加速时间和减速时间:伺服系统的加速和减速时间是影响运动平稳性和控制精度的重要参数。
根据实际情况设置合适的加速和减速时间,避免过快或过慢造成的不稳定性和误差。
2.比例增益和积分时间:伺服系统的比例增益和积分时间决定了位置控制的精度和响应速度。
比例增益越高,控制精度越高,但也容易产生振荡和震荡。
积分时间越长,能够对静差进行补偿,但也可能导致响应速度降低。
根据具体的应用要求和运动特性,合理设置比例增益和积分时间。
3.编码器分辨率和控制频率:编码器分辨率是指伺服驱动器能够识别的最小位置变化量,控制频率是指伺服驱动器的运行速率。
编码器分辨率和控制频率决定了系统的定位精度和响应速度。
一般来说,分辨率越高,定位精度越高,但对驱动器的运行速度和计算资源要求也越高。
控制频率越高,响应速度越快,但也会增加系统资源的消耗。
根据具体的应用需求,选择合适的编码器分辨率和控制频率。
4.过流保护和过热保护:伺服驱动器的过流保护和过热保护是保证系统安全稳定运行的重要参数。
通过设置适当的过流保护和过热保护参数,可以避免驱动器和电机的过载和损坏。
一般来说,过流保护和过热保护的阈值应根据电机的额定功率和允许的工作温度范围来设置。
二、变频器的参数设置变频器是通过调节电机的转速和频率来实现速度控制的装置,参数设置的正确与否直接影响到变频器工作效果。
以下是一些常见的变频器参数设置方法:1.加速时间和减速时间:加速时间和减速时间是影响变频器运行平稳性和控制精度的重要参数。
根据实际情况设置合适的加速和减速时间,避免过快或过慢造成的不稳定性和误差。
2.输出频率和输出电压:输出频率和输出电压决定了变频器的控制范围和输出功率。