拱架机器人的变增益H∞鲁棒控制
机器人LFT变增益H_控制
L F T gai n sc h e d ul e d H ∞ c o nt r ol f or a r o b otic m a nip ul a t or
YU Zhong- wei , CHEN Hui- tang
(Department of Information and Control Engineering , Tongji University ,Shanghai 200092 , China)
1 0 0 0
0 1 0 0
θ ^1 θ ^2 θ ^1 θ ^2
0 0
- bcos (θ 2e - θ 1 e) ・ Me a Me ( 2)
・ ・
0 1
a
0 0 0
+
0
0
设 z r = u , w r = rz r , 则式 ( 3) 的 L PV 系统可表示为 关于变参数 r ( t ) 的 L FT 结构 :
收稿日期 : 2000 - 04 - 03 ; 收修改稿日期 :2001 - 10 - 22 .
[3 ] [4 ]
tional transformation ) 技术 , 将机器人系统转化为以关
节位置的函数为变参数的 L PV ( linear parameter vary2 ing) 模型并表示为关于变参数的 L FT 结构 , 从减少 控制器设计的保守性出发 , 利用变参数设计一种具 有同样 L FT 结构的 L PV H ∞控制器 , 其动态随着变 参数测量值平滑地变化 , 从而克服了传统变增益控 制的缺点 , 具有处理快速变化系统的能力 , 同时它的 自适应特性使控制器又具有很高的动态性能 . 本文 将用到 L FT 的两种形式 : 对于适当维矩阵 R 和 S =
鲁棒控制在机器人技术中的应用

鲁棒控制在机器人技术中的应用随着人工智能和机器人技术的发展,机器人正在变得越来越普遍。
它们被广泛应用于生产和服务等各个领域。
然而,机器人系统的鲁棒性问题是一个仍未解决的难题。
鲁棒控制是一种有效的解决方案,对于机器人来说,鲁棒控制具有重要的应用价值。
什么是鲁棒控制?在机器人控制中,鲁棒控制是一种有效的控制方法,能够处理控制系统中的各种不确定性问题,包括测量误差、外部扰动、系统失效等等。
鲁棒控制在控制系统中的作用是在保持控制系统稳定性的同时,也具有一定的容错能力。
鲁棒控制与PD控制之间的区别与传统的控制方法(PD,PID等)相比,鲁棒控制更加适用于机器人控制系统中的鲁棒性问题,并且能够满足系统的实时性和精度要求。
PD控制器的主要缺点是需要完全了解机器人系统的动态特性以及环境变化,而这些信息往往是不确定的。
鲁棒控制可以处理系统中不确定性问题,并且与环境的变化无关。
鲁棒控制在机器人技术中的应用大多数机器人控制系统都需要实现鲁棒控制方法,以确保系统的高效性和稳定性。
以下是几种机器人系统中鲁棒控制的应用:1. 机器人运动控制在机器人运动控制中,鲁棒控制可提供较好的反应性能,以适应机器人系统中的不确定性问题。
例如,在某些情况下,机器人臂可能会遭遇外部扰动或不确定的物体移动,而这些问题可能会导致机器人系统不稳定。
鲁棒控制器能够在这些条件下保持机器人系统的稳定性。
2. 机器人视觉控制机器人视觉控制是机器人技术的重要应用之一,它可以使机器人具有更高的准确度和自适应性。
鲁棒控制技术可以在机器人视觉控制中提供更加稳定的控制,以适应不同的物体和环境变化。
3. 机器人自适应控制机器人自适应控制是机器人技术中的另一个重要应用,它可以使机器人系统具有更高的灵活性和适应性。
鲁棒控制技术可以在机器人自适应控制中提供更加高效的控制方法,以适应不同的环境变化和系统故障。
未来的发展随着人工智能和机器人技术的发展,机器人系统的鲁棒控制问题将会得到进一步解决和改善。
鲁棒控制方法
鲁棒控制方法鲁棒控制是一种能够在不确定因素存在的情况下保持系统稳定性和高性能的控制方法,能够有效地应对干扰、模型不确定性、测量误差等问题。
在工业自动化、航空航天、电力电子、汽车控制等众多领域都得到了广泛应用。
下面将介绍几种常见的鲁棒控制方法。
一、H∞控制方法H∞控制是一种基于H∞范数的优化设计方法,在保证系统稳定的前提下,同时最小化输出误差对系统控制的敏感性。
在应对不确定因素和干扰时,H∞控制具有良好的性能。
其基本思想是将控制系统中的不确定因素和干扰转化为一个被授权的、有界的、外部加入控制系统的信号,从而获得一个与系统扰动和不确定因素有关的李亚普诺夫函数,通过最小化该函数构建H∞控制器。
H2控制是一种线性鲁棒控制方法,通过最小化系统输出误差的均方值来保证系统控制的鲁棒性。
对于有利于系统稳定的外部干扰和参数扰动,可以采用H2控制增强系统鲁棒性。
该方法常用于工业自动化、电力电子、通信网络等领域。
三、μ-合成方法μ-合成方法是一种基于μ分析技术的鲁棒控制方法。
利用复杂的控制算法来确保系统的鲁棒性较强。
μ-合成方法的基本思想是将控制器的参数综合考虑到控制系统的所有可能变化,以及控制系统的不确定性和干扰,从而建立一个更加鲁棒的系统。
该方法的优点是具有较高的控制精度和鲁棒性,同时也适合于复杂的多变量系统。
四、经验模态分解鲁棒控制方法经验模态分解(EMD)是一种对非线性、非平稳数据进行处理的信号分析方法。
EMD鲁棒控制方法利用EMD分析信号的自适应性和鲁棒性,将系统的状态之间的相互作用显式地考虑在内,使控制器在不断改善的系统控制下不断优化控制效果,从而达到较好的控制效果和较高的鲁棒性。
综上所述,鲁棒控制方法可以有效地通过考虑控制系统中的不确定因素和干扰来提高系统的控制精度和鲁棒性。
选择合适的鲁棒控制方法取决于具体情况,需要根据控制目标、系统模型、预期性能和鲁棒性需求等因素进行选择。
控制系统中的鲁棒控制与自适应控制

控制系统中的鲁棒控制与自适应控制鲁棒控制与自适应控制是控制系统中两种重要的控制策略。
本文将对这两种控制方法进行详细介绍,并探讨它们在控制系统中的应用。
一、鲁棒控制鲁棒控制是一种控制方法,旨在使系统对于参数变化、外部干扰和建模误差具有较好的鲁棒性。
它通过设计控制器,使得系统能够在不确定性条件下保持稳定性和性能。
鲁棒控制通常用于应对实际系统中存在的模型不准确、参数变化和干扰等不确定因素。
鲁棒控制的一个重要工具是H∞控制理论。
H∞控制通过优化系统的H∞范数,将鲁棒性能与控制性能相结合。
它可以通过鲁棒性设计方法来有效地解决不确定性和干扰问题,提高系统的稳定性和鲁棒性。
鲁棒控制广泛应用于工业控制、飞行器控制和机器人控制等领域。
例如,在工业控制中,鲁棒控制可以帮助系统应对参数变化、负载扰动和模型不确定性。
在飞行器控制中,鲁棒控制可以提高系统对于风速变化和姿态扰动的鲁棒性。
在机器人控制中,鲁棒控制可以应对不确定的环境和任务需求变化。
二、自适应控制自适应控制是一种控制方法,通过实时地调整控制算法和参数来适应系统的变化。
自适应控制具有较强的适应性和鲁棒性,在面对系统参数变化和模型不准确时表现出良好的控制性能。
自适应控制基于模型参考自适应原理,通过参考模型来实现期望输出与实际输出的一致性。
它根据误差和系统状态,自适应地调整控制器参数,以达到期望的控制效果。
同时,自适应控制器还可以实时地对系统参数进行估计和补偿,提高系统的鲁棒性和性能。
自适应控制在很多领域都有广泛的应用。
例如,在机电系统中,自适应控制可用于解决系统刚性和非线性问题。
在信号处理中,自适应滤波器可用于实时地调整滤波器参数,提高滤波性能。
在网络控制系统中,自适应控制可用于应对网络延迟和通信丢包等问题。
三、鲁棒控制与自适应控制的比较与应用鲁棒控制与自适应控制是两种不同的控制方法,各自具有不同的优势和适用范围。
鲁棒控制适用于系统模型不准确、参数变化和干扰等不确定性较大的情况。
《鲁棒控制》-3-H无穷控制理论
考虑不确定系统
x (t ) = Ax (t ) + Bu (t )
其中: A = A0 + ΔA ; B = B0 + ΔB
[ΔA ΔB] = DΩ[E1 E2 ] = DΩE
ΩT Ω ≤ I
问题:求状态反馈 u = Kx, s.t.
( E1 + E2 K ) ( sI − A0 − ) B0 K −1 D ∞ < 1
⎤ ⎥ ⎥ ⎥ ⎥⎦
r
=
Tzr r
性能指标等价为:
∫ min ∞ zT z dt = min z 2
0
2
设
{ } r ∈
r
r = Wd, d ∈ H2 ,
d
≤1
2
《鲁棒控制》课堂笔记 清华大学自动化系 钟宜生
-- H∞ 次优问题
问题:求 C1 和 C2 使系统内稳定,且:
⎡
min ⎢ sup ⎣ C1 ,C2 d∈H2 , d 2 ≤1
1 min
K 1+ PK ∞
-- H∞ 最优问题
(3) 频域鲁棒镇定问题
Δ
+
−
P0
K
} G = {P P = P0 + Δ, Δ 稳定,且 Δ ( jω ) ≤ r ( jω ) ,∀ω ∈ R
其中: P0 为标称对象; r ( s) 是已知的稳定的实有理函数。
• 鲁棒镇定: K 镇定 G ,即对 ∀P ∈G, K 使闭环系统内稳定。
问题:
( ) min
K内稳G
Tzw
∞
= min K内稳 P
1+ PK −1
∞
2、鲁棒镇定问题 ⇒ 标准问题
Δ
机器人手臂轨迹跟踪的变增益LPV鲁棒H∞控制器设计

机器人手臂轨迹跟踪的变增益LPV鲁棒H∞控制器设计郭海峰;窦福谈;鲁宁波【摘要】According to the dynamic uncertainties and external disturbance uncertainties of robot manipulator model,a kind of robust H∞ controller design method with the variable gain linear parameter varying is introduced,and Robot manipulators trajectory tracking con-trollers are designed. Dynamic equations of the Robot manipulators trajectory tracking are established by Lagrange method,which adopts the variable gain linear parameter varying and convex decomposition technique,and the variable parameter models of dynamic models are transformed,the variable parameter models of the dynamic models are transformed into the linear parameter varying models with the convex polyhedron structure. Based on robust control theory and linear matrix inequality theory,the feedback controller at each vertex of the convex polyhedron is designed. Then,linear parameter varying controller is obtained by using each vertex controller. Simulation results show that robot manipulators have good tracking performance for the joint position change.%针对机器人手臂模型中存在动态不确定性和外部干扰的不确定性,引入变增益线性变参数的鲁棒H∞控制方法,设计了手臂轨迹跟踪控制器.采用拉格朗日法建立机器人手臂轨迹跟踪动态方程;利用变增益线性变参数凸分解技术,将这一动态模型转化为具有凸多面体结构的线性变参数模型;根据鲁棒控制理论和线性矩阵不等式理论,在凸多面体的各个顶点设计反馈控制器,然后利用各个顶点控制器综合得到线性变参数控制器.仿真结果表明,机器人手臂对于关节位置的变化始终具有良好的跟踪性能.【期刊名称】《沈阳理工大学学报》【年(卷),期】2017(036)006【总页数】5页(P56-60)【关键词】机器人手臂轨迹跟踪;鲁棒H∞控制;变增益;线性变参数;线性矩阵不等式【作者】郭海峰;窦福谈;鲁宁波【作者单位】沈阳理工大学自动化与电气工程学院,沈阳110159;沈阳理工大学自动化与电气工程学院,沈阳110159;沈阳理工大学自动化与电气工程学院,沈阳110159【正文语种】中文【中图分类】TP273机器人手臂轨迹指的是机器人操作过程中目标执行器的位置、速度、加速度等概念。
控制系统中的鲁棒控制方法与应用
控制系统中的鲁棒控制方法与应用随着科技的发展,控制系统在工业生产、机器人、交通运输等领域中扮演着至关重要的角色。
然而,由于环境条件的不确定性和系统参数的变化,控制系统往往面临着挑战。
为了在不确定的环境下依然能保持良好的控制性能,鲁棒控制方法应运而生。
一、鲁棒控制的概念和特点鲁棒控制是指在控制系统中,在环境不确定或者系统参数发生变化的情况下,仍然能够保持良好的控制性能。
其特点主要有以下几点:1. 对参数变化和干扰具有一定的容忍度;2. 能够在控制系统的整个工作范围内保持稳定性;3. 具有自适应能力,可以根据环境变化自动调整控制方法。
二、鲁棒控制的方法鲁棒控制的方法有很多种,其中比较常用的包括:1. H∞控制:H∞控制方法通过优化控制器的参数来最小化系统的灵敏度函数,从而增强控制系统的鲁棒性。
2. μ合成控制:μ合成控制是一种综合设计方法,通过有效地引入不确定性模型来设计鲁棒控制器,并考虑系统的性能指标。
3. 小范数控制:小范数控制是一种基于无穷小范数理论的方法,通过控制系统的特征值或者特征向量来实现鲁棒控制。
三、鲁棒控制的应用鲁棒控制方法广泛应用于各个领域的控制系统中,以下为几个典型的应用场景:1. 工业生产控制:在工业生产中,鲁棒控制可以提高生产线的稳定性和效率,确保产品质量和产量的稳定。
2. 机器人控制:在机器人控制系统中,鲁棒控制可以提高机器人的运动精度和抗干扰能力,保证其在不确定环境下的稳定性。
3. 交通运输系统:在交通运输系统中,鲁棒控制方法可以应用于车辆的稳定性控制和路径规划,提高交通流的效率和安全性。
总结控制系统中的鲁棒控制方法是应对环境不确定性和系统参数变化的一种有效手段。
通过合理选择和设计控制方法,可以提高控制系统的鲁棒性和稳定性,保证系统在不确定的环境下依然能够达到预期的控制目标。
随着科技的不断进步,鲁棒控制方法在各个领域将发挥越来越重要的作用,为提高生产效率和保证安全性提供有力支持。
机器人非线性连续变增益H∞控制器设计
误差 因此 Β
Χ
Δ
Δ
在状态反馈控制 υ Κ ξ
机器人
年月
下 从干扰 ω τ 到输出 Ζ τ 的传函设为 Τ ωζ σ 对 于一给定的闭环 Η ] 性能 Χ 我们的目标是设计 状态反馈 Κ 使得
统闭环极点配置在 α ρ Η Π 的区域内 利
用×
≤
×
¬ 经优化算法 得
到最优 Χ
可以验证 在各平衡点处 系统闭
环极点均在要求范围内 所以在各平衡点求得的控
制器不仅满足极点配置要求 同时因优化的 Χ 值很 小而具有很好的 Η ] 性能 限于篇幅 我们以 Κ 为例 加以说明 在各平衡点处求得的 Κ 的值如表
能够通过有效的内点优化算法来求解 因此 我们可
以通过求解一组
来设计即满足 Η ] 性能指标
又通过极点配置获得良好的动态性能的多目标控制
器≈ 本文满足 Η ] 性能和极点配置 的
×
≤
×
¬ 求解≈
通过
2 机器人模型及其线性化 Ρ οβοτιχ μ οδελ
ανδ ιτσ λινεαριζατιον
考虑具有 ν 个关节的刚性机器人 其动力学方
ς αλυε Κ12 ατ εθυιλιβριυμ ποιντσ
Η
Π
Π
Π
Π
Π
Π
Η
Π Π Π Π Π
机器人
年月
由! 和
我们利用多项式拟合技术
来拟合满足要求的泰勒级数 从而得到一连续增益
函数 其最大拟合误差为 ◊
式中的 Μ 自动增
系数 χιϕ如表
最优控制问题的鲁棒H∞控制设计
最优控制问题的鲁棒H∞控制设计最优控制理论在工程系统控制中具有重要的应用价值。
然而,传统的最优控制方法在系统模型存在不确定性或外部干扰的情况下可能无法有效应对。
为了克服这一问题,鲁棒控制方法被引入到最优控制中,并且在实际应用中取得了显著的成果。
本文将探讨最优控制问题的鲁棒H∞控制设计方法及其应用领域。
一、鲁棒控制概述鲁棒控制是一种针对不确定性或外部干扰具有克服能力的控制方法。
其目标是在不确定性环境中实现系统稳定性和性能要求。
最常见的鲁棒控制方法之一是H∞控制,该方法通过优化问题来设计控制器,以抑制系统中不确定性的影响。
二、最优控制问题最优控制问题旨在通过选择最佳控制策略来实现系统的最优性能。
在没有不确定性时,可以使用动态规划、变分法等方法求解最优控制问题。
然而,在实际应用中,系统往往存在参数不确定性或外部干扰,导致最优控制问题变得更加复杂。
因此,需要引入鲁棒控制方法来解决这些问题。
三、鲁棒H∞控制设计方法鲁棒H∞控制方法是一种常用的鲁棒控制方法,其基本思想是在保证系统稳定性的前提下,优化系统对外部干扰的抑制能力。
鲁棒H∞控制设计问题可以被描述为一个优化问题,目标是最大化系统的H∞性能指标,并且确保控制器对系统模型不确定性具有鲁棒性。
为了实现鲁棒H∞控制设计,可以采用两种常用的方法:线性矩阵不等式(LMI)方法和基于频域分析的方法。
LMI方法通过求解一组线性矩阵不等式来得到控制器参数,从而实现系统的鲁棒H∞控制设计。
基于频域分析的方法则通过频域特性分析来设计控制器,以实现系统对不确定性的鲁棒性。
四、鲁棒H∞控制设计的应用领域鲁棒H∞控制设计方法在工程领域有广泛的应用。
它可以应用于飞行器姿态控制、机器人控制、智能电网控制等多个领域。
以飞行器姿态控制为例,鲁棒H∞控制设计可以有效提高飞行器对外部干扰的鲁棒性,并且保证姿态跟踪性能。
在机器人控制领域,鲁棒H∞控制设计可以提高机器人对环境不确定性的抑制能力,以实现精确的轨迹跟踪。
驱动电机负载模型Hinf(H无穷)鲁棒控制器设计
驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
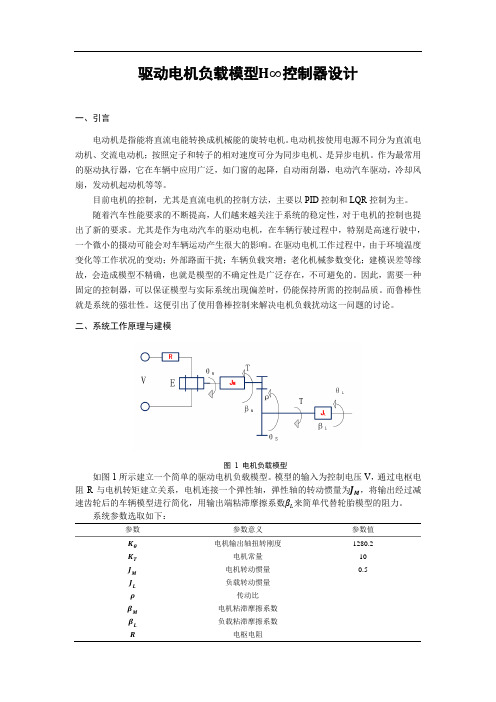
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
具有鲁棒性的控制设计方法

具有鲁棒性的控制设计方法控制系统的设计和实现通常面临着各种不确定性和外部扰动的挑战。
为了克服这些问题并确保系统能够稳定和可靠地运行,具有鲁棒性的控制设计方法变得至关重要。
在本文中,将介绍一些常用的鲁棒控制设计方法,并探讨它们的优点和适用范围。
一、H∞控制方法H∞控制方法是一种广泛应用于工业控制系统中的鲁棒控制方法。
它的核心思想是通过优化控制器的H∞范数性能指标,使得控制系统对不确定性和扰动具有一定的鲁棒性。
H∞控制方法可以通过对控制器设计的性能要求进行权衡,从而实现系统的稳定性和鲁棒性。
H∞控制方法的主要优点是能够有效地处理各种不确定性和扰动,并具有较好的鲁棒性。
然而,它也存在一些局限性,例如需要对系统模型的不确定性进行较为准确的描述,以及对系统的结构进行一定的约束。
二、μ合成控制方法μ合成控制方法是一种基于现代控制理论的鲁棒控制方法。
它通过优化控制器的μ性能指标,实现系统的鲁棒性和性能要求之间的权衡。
μ合成控制方法能够有效地处理不确定性和扰动,并在实际应用中取得了良好的效果。
μ合成控制方法的主要优点是能够在控制器设计过程中兼顾系统的性能和鲁棒性要求,并具有较好的数学理论基础。
然而,μ合成控制方法也存在一些技术难题,例如需要进行复杂的计算和优化,并对系统的结构和参数进行一定的限制。
三、鲁棒PID控制方法鲁棒PID控制方法是一种基于传统PID控制算法的鲁棒控制方法。
它通过在PID控制器中引入补偿器,实现对系统不确定性和扰动的补偿,从而提高系统的稳定性和鲁棒性。
鲁棒PID控制方法的主要优点是简单易用,适用于各种不确定性和扰动情况,并且不需要对系统模型进行精确的描述。
然而,鲁棒PID 控制方法也存在一些问题,例如控制器的性能受限于PID结构的局限性,并且对不确定性和扰动的补偿能力有一定的限制。
四、自适应控制方法自适应控制方法是一种通过在线估计和补偿系统的不确定性和扰动的鲁棒控制方法。
它通过不断更新控制器的参数,使系统能够自适应地应对不确定性和扰动的变化,从而实现系统的鲁棒稳定性。
控制系统中的鲁棒控制技术研究

控制系统中的鲁棒控制技术研究一、引言鲁棒控制技术是指针对不确定性系统的稳定控制和性能优化技术。
随着工业过程的复杂化,控制系统中的不确定性因素越来越多,因此鲁棒控制技术的应用也越来越重要。
本文将从理论和应用两方面探讨控制系统中的鲁棒控制技术。
二、鲁棒控制理论1.鲁棒控制的定义鲁棒控制是一种针对含不确定性因素的控制系统的控制方法,其目的是稳定系统,并保证控制性能鲁棒不变。
2. 鲁棒性分析的方法鲁棒性分析是评估控制系统鲁棒稳定性的方法,其分为两类:基于频域的方法和基于时域的方法。
在基于频域的方法中,常用的有极点配置法和导数限制法;在基于时域的方法中,常用的有插补技术和Lyapunov方法。
3. 鲁棒控制的设计针对含不确定性因素的控制系统,鲁棒控制设计有多种方法,常见的有:H_∞控制、μ合成控制、基于小增益的鲁棒控制和基于人工神经网络的鲁棒控制。
三、鲁棒控制应用1. 工业过程中的应用鲁棒控制广泛应用于工业过程中,提高系统鲁棒稳定性和控制性能,达到更好的经济效益与生产品质。
工业过程中常用的鲁棒控制方法有:模糊控制、PID控制、智能控制等。
2. 无人系统中的应用无人系统中的鲁棒控制主要是针对飞行器和机器人等自主系统的控制。
在应对无人系统的不确定性和外部扰动时,鲁棒控制成为有效的控制方法。
3. 军事系统中的应用在军事系统中,鲁棒控制主要应用于武器装备的控制和导航系统的控制。
经过鲁棒控制的武器装备能够更好地适应敌人的威胁和各种环境的变化,提高装备的战斗效能。
四、总结与展望随着人工智能和机器学习等技术的不断发展,鲁棒控制技术在工业、通信、军事等领域的应用将会更加广泛。
同时,鲁棒控制理论也将不断完善和更新,为各种控制系统的高效、精准、安全提供更好的技术支持。
鲁棒控制算法
鲁棒控制算法1. 引言鲁棒控制算法是一种应用于控制系统中的方法,旨在保证系统在不确定、多变的环境中的稳定性和性能。
鲁棒控制算法可以有效应对各种干扰和参数变化,使系统能够在不确定性条件下保持良好的控制性能。
2. 什么是鲁棒控制算法2.1 定义鲁棒控制算法是指那些能够对系统的模型参数不确定性和外部干扰有很强适应能力的控制算法。
它能够保证系统在参数不确定或者受到干扰时仍能够保持稳定运行、较好的控制品质。
2.2 特点鲁棒控制算法具有以下几个特点: 1. 对于系统模型参数的不确定性能够有一定的容忍度。
2. 对于来自外部干扰的抑制能力较强。
3. 对于传感器误差和测量噪声具有较好的适应能力。
3. 鲁棒控制算法的应用3.1 工业控制系统鲁棒控制算法广泛应用于各类工业控制系统中,例如化工过程控制、机械设备控制、电力系统控制等。
在这些系统中,常常存在着工作环境的不确定性和参数变化,鲁棒控制算法能够保证系统在这些不确定性条件下依然能够保持良好的控制性能。
3.2 机器人控制鲁棒控制算法在机器人控制中也得到了广泛的应用。
机器人在执行任务的过程中,常常会面临环境的不确定性和干扰,例如摩擦力的变化、外部控制输入的变化等。
鲁棒控制算法能够保证机器人的运动稳定性和精度,提高机器人执行任务的效果。
3.3 自动驾驶在自动驾驶领域,鲁棒控制算法也是不可或缺的一部分。
自动驾驶系统中的控制算法需要具有很高的适应性,能够应对各种不确定性和干扰,例如天气条件的变化、道路状况的变化等。
鲁棒控制算法可以使自动驾驶系统在这些不确定性条件下依然能够保持稳定、安全的行驶。
4. 鲁棒控制算法的实现4.1 H∞ 控制H∞ 控制是一种常用的鲁棒控制算法,它通过设计一个保证系统从输入到输出的最大幅度稳定裕度(Maximal Stability Margin)的控制器来实现系统的鲁棒性能。
4.2 μ合成μ合成是一种基于奈奎斯特稳定裕度(Nyquist Stability Margin)的鲁棒控制算法。
鲁棒控制算法在机器人运动控制中的应用研究
鲁棒控制算法在机器人运动控制中的应用研究机器人家族在不断壮大,无论是工业,还是家庭服务,都离不开它们快速和精确的动作控制。
然而,由于环境因素的影响,机器人的运动控制面临的是极具挑战性的问题。
鲁棒控制算法是近年来兴起的一种技术,它通过自适应和强鲁棒性等特性,为机器人的运动控制提供了一种可靠和高效的解决方案。
本文将从鲁棒控制算法的基本概念入手,探究它在机器人运动控制中的应用研究,分析鲁棒控制算法的优势与不足,并展望其未来的发展方向。
一、鲁棒控制算法的基本概念鲁棒控制算法是在给定不确定性模型时,通过自适应调节,保持系统的良好运行的一种技术。
它包括四个基本环节:建模、控制器设计、鲁棒性分析、控制器实现。
这四环节的目的都是为了实现对不确定性因素的鲁棒性处理。
其中,建模环节是控制系统中最重要的环节之一,它用于描述控制目标和系统需要控制的属性,通常在此环节中,利用物理学的原理建立数学模型。
控制器的设计环节是为了确定一种或多种可行的控制器,并将其应用于系统中。
鲁棒性分析环节是为了确定控制方案的鲁棒性,即在不同情况下可以保持足够的性能。
控制器实现环节是为了将控制器应用到实际的系统中。
二、机器人运动控制中的应用研究机器人运动控制的目标是控制机器人的位置、速度、加速度和姿态等动作特性。
机器人的运动控制和非机器人对象的运动控制不同之处在于,机器人需要将运动控制的结果传递给机器人内部的运动控制系统,而非外部的运动控制器。
因此,在机器人运动控制中,需要考虑机器人内部的控制部分的动作特性。
针对机器人运动控制中的这种特殊性质,鲁棒控制算法提供了一种新的解决方案。
这种新解决方案中包含了模型不确定性、感知不确定性和控制器不确定性,通过鲁棒控制算法,可以保证机器人的位置、速度和姿态控制更为准确和稳定。
三、鲁棒控制算法的优势与不足在实际应用中,鲁棒控制算法具有一些明显的优势。
首先,它的强鲁棒性能可以处理控制系统中的不确定性,有效地抵消了外部环境和内部干扰等不确定因素的影响;其次,它具有自适应特性,能够动态调节控制参数和优化控制方法,以适应不同工作环境下的控制需求;最后,该算法能够从多个角度对系统的不确定性进行分析,使得控制器能够在不同条件下保证控制性能。
机器人的鲁棒控制
+
xT
x
+
u0T
u0
]dt
取得极小值。
定理 2.1 求解鲁棒控制问题(1)可以转化为求解最优控制问题(2):如果存在反馈控制率
∫ u = u0 (x) 使得性能指标泛函
∞ 0
[
f max
2
(
x)+
||
x
||2
+ || u ||2 ]dt 达到极小,那么满足条件的最优
控制问题(1)的解 u = u0 (x) 就是鲁棒控制问题(2)的解。
② G(x1) − G0 ≤ Gmax (x) , Gmax (0) = 0 。 这两点保证了 x = 0 是系统的一个平衡点。为了使系统方程中加入控制项,我们令 u = τ − G0 , f (x) = −(V (x1, x2 ) + (G(x1) − G0 )) ,
-1-
寻求反馈控制率 u = u0 (x) 使闭环系统 x = Ax + Bu + Bf 的零解渐近稳定。
为了求解这个鲁棒控制问题,我们构造下面的最优控制问题。
(2) 最优控制问题:对辅助系统 x = Ax + Bu ,寻找一个反馈控制率 u = u0 (x) 使得性能
∫ 指标泛函 J =
∞ 0
[
xT
Px
所以我们只需求解一个代数的 Riccati 方程
I + P + AT Q + QA − QBBTQ = 0
(6)
其中 P 是构造的正定矩阵, Q 正定。解出 Q 即可求出控制 u0 = −BT Qx 。
我们证明了这个最优控制器也是所求的鲁棒控制器:此时只要取 Liapunov 函数
鲁棒控制理论与方法
鲁棒控制理论与方法鲁棒控制是现代控制理论中的一个重要分支,它致力于设计出对系统参数变化、外部扰动和建模误差具有鲁棒性的控制器,以保证系统在不确定性环境下的稳定性和性能。
本文将介绍鲁棒控制的基本理论和常用方法,以及其在工业控制、机器人控制等领域中的应用。
一、鲁棒控制基础理论鲁棒性是指控制系统对不确定性的一种抵抗能力,它可以通过针对系统模型的不确定性建立数学模型,以保证系统稳定性和性能。
鲁棒控制的基础理论包括:1. H∞ 控制理论:H∞ 控制是一种用于处理线性时不变系统鲁棒控制问题的数学工具。
该方法通过定义一个性能指标,以最小化系统输出的最坏情况下的波动来设计控制器。
2. μ合成控制理论:μ合成是一种基于描述函数的鲁棒控制方法,它将系统不确定性建模为复杂函数,并通过求解非线性最优化问题来设计控制器。
3. 鲁棒控制的小参数理论:该理论主要研究在参数扰动很小时,系统性能的鲁棒稳定性和鲁棒性问题。
二、常用的鲁棒控制方法鲁棒控制方法多种多样,下面列举几种常用的方法:1. H∞ 控制方法:H∞ 控制方法通过在系统输出和控制器输入之间引入鲁棒性加权函数来设计鲁棒控制器。
该方法适用于线性时不变系统和线性时变系统。
2. μ合成控制方法:μ合成控制方法通过优化复杂描述函数来设计鲁棒控制器。
该方法适用于线性和非线性系统,并且具有较强的泛化能力。
3. 自适应控制方法:自适应控制方法将未知参数作为反馈调整的对象,通过在线估计参数的方式设计鲁棒控制器。
该方法适用于需要适应不确定性参数的系统。
4. 鲁棒滑模控制方法:鲁棒滑模控制方法通过引入滑模面的概念,以实现对系统模型误差和扰动的高度鲁棒性。
该方法适用于非线性和时变系统。
三、鲁棒控制在工业与机器人控制中的应用鲁棒控制在工业控制和机器人控制领域具有广泛的应用,以下列举几个实际应用案例:1. 工业过程控制:鲁棒控制可以用于工业过程中对温度、压力、流量等参数的控制。
通过对系统模型的不确定性建模和鲁棒控制器的设计,可以保证工业过程的稳定性和性能。
鲁棒H∞控制在林业机器人中的应用研究

鲁棒 H 控 制具有 以下特点 :
①确立 了系统在 频域 内进行 回路 成形的技术 和手 段 , 服了经典控制理论 和现代控制理论各 自的不足 , 克 使经典的频域概念与现代 的状态空 间方法融合在一起 。
②可以把控制 系统设计转换成 H 控制 , 它更 接近 于实际情况 , 并能满 足实 际需要 。
出发 , 究开发高性能 的轻 型林 业机器人 ; 研 ②采用 人工
智 能技术 , 究开发 自主作业 机器人 ; 研 ③研 究开 发林产 品精深加工机 器人 。 倒立摆系统是一个典 型的非线性 、 强耦 合 、 多变 量
F x 为负定 的, () 即对所有 非零的 向量 v “v x v 0 ∈R ,下( )< ,
③给出 了鲁棒控制系统的设计方法 , 以通过求解 可 两个 R ca 方程来获得 H 控制器 , i t ci 充分考虑 了系统不
确定性带来 的影 响,不仅 能保证控 制系统 的鲁棒稳 定 性, 而且还 能优化一些性 能指标 。 ④它 是频域 内的最优 控制理论 , 控制器 的参数 H 设 计比最 优调节器更加直接。
或者 F x 的最大特征值小于零 。 () 系统 与控制 中的许 多 问题初看起 来不是一个 线性 矩 阵 不等式 , 或不 具有 式 ( ) 1 的形式 , 但可 以通 过适 当 的处理 将 问题 转换 成具 有式 ( ) 1形式 的 一个线 性矩 阵 不等式 。 三类标 准的线性不 等式如 下 : ①可行性 问题 ( M P : L I )对给定的线性矩阵不等式 F
林业生产作业 环境 比较恶 劣 , 工人 劳动强度大 , 现 有作业机 械的使 用性能受 到很 大限制 , 为此 , 世界 上许 多林业发 达 国家 正大力 开展林 业机 器人 的研究 工作 。 目前 , 日本 、 国和瑞典等 国家 已经或正在 开发 多种林 美 业 机器人 。林业机器人 的研究 , 对提 高生 产效率 和减轻 工人劳动强度 , 提高人身安全等方 面都有很重要的作用 。 我 国森林 地形和作业环境 十分复杂 ,林业 作业 的 机 械化 和 自动化 水平还很低 ,与林业 发达 国家的差距
高压巡检机器人H∞鲁棒控制器设计

高压巡检机器人H∞鲁棒控制器设计邵嶽【摘要】针对巡检机器人易受恶劣作业环境及各种扰动影响难以控制的问题,基于机器人的动力学方程,通过设计合理的控制力矩,推导出机器人在有扰动情况下系统误差的状态空间模型,基于此模型利用线性矩阵不等式(LMI)和H∞理论对机器人进行了鲁棒控制分析,设计了机器人鲁棒H∞控制器,给出了H∞控制器存在的条件和求取方法,求出了机器人的状态反馈控制器,最后在Matlab/Simulink环境下对机器人的机械臂进行了轨迹跟踪仿真,结果表明本文所设计的鲁棒控制器能够满足巡检机器人机械臂响应快速、跟踪准确、系统稳定、抗扰动效果好的设计要求.【期刊名称】《电气技术》【年(卷),期】2016(000)001【总页数】6页(P66-71)【关键词】巡检机器人;误差状态空间模型;H∞理论;鲁棒控制【作者】邵嶽【作者单位】沈阳工业大学电气工程学院,沈阳 110870【正文语种】中文检机器人是一种沿高压架空输电线路行驶并代替或辅助人工巡检的特种机器人,在国民生产和日常生活中占有重要地位,是保证电力部门的正常供电的关键,具有广阔的应用前景[1]。
巡检机器人的有效控制是保证正常巡检的前提,机器人机械臂轨迹跟踪的响应速度和跟踪精度是实现机器人自主作业的关键,若响应速度过慢、跟踪误差过大或稳定性不好等都会导致一系列的问题,更严重的情况甚至会导致巡检机器人高空坠落的重大事故。
因此研究巡检机器人的鲁棒控制具有重大实际意义。
从控制的角度看,获取巡检机器人的控制模型是实施有效控制的第一步,但在实际工程应用中要想得到巡检机器人的精确模型是很困难的,在建模时通常需要做一些合理的近似处理,甚至忽略了一些不确定因素;此外巡检机器人高压强电磁干扰的作业环境等使得机器人的控制存在诸多不确定性的扰动,总之巡检机器人在作业过程中会受到来自自身和外界的多种干扰。
这些不确定因素和扰动可能会引起系统控制品质的下降,甚至导致系统的不稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
援 、
移 。本文 主要针对拱架机器人的 Y向动力学进行 分 析 和研究 。为了避 免了双边驱动 的高精度 同步控 制 和复杂的结构 ,拱架机 器人采用了单边驱动的形式 ,
但 是 单 边 驱 动 也 存 在 不 足 , 由于 质 心 偏 置 而 驱 动 力 不 通 过 质 心 ,工 作 中将 产 生 不 对 称 的 惯 性 力 ,而 工
工
图 】 拱 架机 器人 简化 模 型
业 中经常使 用的滚珠 线性滑轨 的刚度有 限 ,因此 , 会使工作 台出现振 动加剧 、变形和倾斜等不利情况 。
使 系统依然获得 良好的性能 。 这一更现代的设计策 略显然需要精确 的建模技巧和模态分析方法 。
线 导轨
拱 架机器 人广泛地 应用于 各种精密 制造领域 , 例 如 表面 贴 装 设 “ 、半 导 体 封 装 设 备 等 。 架 机 器 拱
人的 简化模 型如图 l所示 ,接头和贴装头 由两个不
研究。 拱 架机 器 人两 运 动轴 由于 轴 的 位置 影 响 Y轴 的
通 过在整个变参数集内寻找一个单一 的 L a uo yp nv函 数来保证 L V系统对所有可 能轨迹都具有 H 性能 , P 但这 种方 法对变参数变化 率没有限制 ,由此得到的 稳定性 条件具 有很大的保 守性 ,且在 实际系统 中难
对 半 导 体 封 装 设 备 ,要 求 拱 架 机 器 人 能 驱 动 贴 装 头
快速地 从一 个位置 移动到 另一个位置 ,并使 贴装头
处 的 稳 态 调 节 时 间最 短 。
Y n 和 T yo[ 1 出了 两 自 由 度 拱 架 机 器 人 ag alr,提 3 4 的 建 模 和 控 制 问题 ,在 文 献 中 两 轴 耦 合 的 含 义 是 指
动力学而相互耦合 , 这一耦合的产生是 由于贴装头在 梁上的位置Байду номын сангаас决定了 Y轴的质量分布 ,也即 Y轴运动 的 振 动特 性 ,此 为一 典 型 的线 性 变 参数 系 统(ier Lna p a t a i , P ) 对这类系统设计控制器有两 r a me r r n L V , ev y g 类方法 , 一类为固定增益设计法 , 这类方法的特 点是 :
此控制器设计方法有 效地降低 了控制器设计 的保守性。
关键词 :拱 架机器人 ;线性矩阵不等式 ;H 性能覆盖 ;变增 益 H 控 制 ;严格 的系统等价
中图分类号 :T 0 1 Q 5. 9
0 引 言
文献标识码 :A
文章编号 :17 —7 8 (0 70 —0 6 —1 6 3 102 0 )3 1 1 4
为 了克服拱架 机器人 由单边驱 动所引起 的振动
问 题 ,一 个 很 自 然 的 思 路 是 增 加 系 统 刚 性 , 使 系 统
负载在 方 向的位置影 响 Y方向的动力学特性 ,文
献 【,】 定 接 头 、 工 作 台 与 导 轨 1 连 接 为 刚 性 连 3 假 4 司的 接 ,这 一 假 设 并 不 适 用 于 本 文 所 研 究 的 系 统 。本 文
第0 午3期 22 第 3 0卷 7 月
中国 科 技 论 文 在 线 S E CE AP RON I E ClN P E LN
Vl N . o_ O 2 3
M a .0 7 r 0 2
拱架机 器人的变增益 H 鲁棒控制 ∞
吴金 波 ,尹周 平 , 熊有 伦
( 中科技 大 学机械 学院,武汉 华
设计 一 个时 不 变 的控 制 器 ,使 在 参数 的 变 化范 围 内 ,
以实现。文献[,3虽然考虑了变参数 变化率的有界 61]
性 ,但 它只适合一类特殊的具有仿射形式 的 L V系 P 统 ,同时需利 用变参数 的变化率反馈 ,这 给实 际系 统 的实现带来 困难 。而 且 ,上述方法的共 同弱点是 无法保证 一定能找到满足要 求的变增益控制器 。虞
摘
407 ) 30 4
要: 本文研 究 了由同步带驱动的拱 架机器人 的建模 与变增益 H 鲁棒控制 问题。此拱架机器人提供两个相 互
垂直方 向的运 动 ,即沿梁运 动的贴装 头 ( 向)和沿基座运 动的梁 ( 向) 方 Y方 ,其 中Y向动力学建模为一线性 变参数系统,而贴装 头在 向的位 置作为系统的变参数 。模 型考虑 了同步 带驱 动系统 的动力学特性 ,贴装头与 导轨 间连接的横 向柔性 ,梁 与导轨 间连接 的扭转柔性。为使梁在 Y方 向得 到快速精确 的定位 ,本文研究 了线性 变参数系统的定位 控制方法 ;首先采用严格 的等价变换 ,将一类通用 的线性变参数系统描述模型变换为一简化
象刚体一 样运动 ,但这势 必s Dl  ̄i : 了系统质量 ,需要
大 功 率 的 驱 动 器 才 能 获 得 良 好 的 控 制 性 能 。 另 一 种 思 路 是 限 制 系统 运 动 部 件 的 质 量 , 允 许 具 有 一 定 的
所 研究 的拱架机 器人采用 单滑块支撑 形式 ,当梁 足 够 长时 ,柔性梁与 导轨间 的扭 转柔性 不能忽略 ,而
模型 ,在 引入 “ H 变 性能”的概 念后 ,将控制器 的设计问题 转换 为满足线性矩 阵不 等式 约束 的参数矩阵的求解 问题 ,并给出 了无需变参数变化率反馈 的变增 益全 阶输 出反馈 H 控制器设计方法 ;然后基于 “ H 性能覆盖 ”
的概念 给出了保 H 性 能的插值方法 ;最后将所提算法应用于拱架机器人 Y向动力学模型上。仿真结果表 明:
且 , 当工 作 台 与 柔 性 梁 1 连 接 为 非 刚 性 连 接 时 , 司的
柔性 ,通 过选择 适 当的传感器 、驱动器和控制算法 ,
12 6
拱 架机 器人的变增益 H 鲁棒控制
第2 第3 卷 期
2 0 年 3月 07
工作台的移动对 系统振 动模态的影响还需进 一步的