GM700双感度陀螺仪设置
魔灯Dual ISO的理解与设置探索(原创)
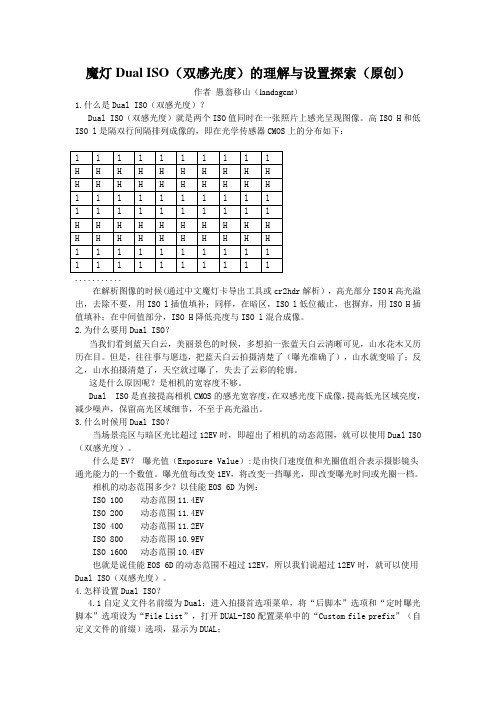
魔灯Dual ISO(双感光度)的理解与设置探索(原创)作者愚翁移山(landagent)1.什么是Dual ISO(双感光度)?Dual ISO(双感光度)就是两个ISO值同时在一张照片上感光呈现图像。
高ISO H和低ISO l是隔双行间隔排列成像的,即在光学传感器CMOS上的分布如下:l l l l l l l l l lH H H H H H H H H HH H H H H H H H H Hl l l l l l l l l ll l l l l l l l l lH H H H H H H H H HH H H H H H H H H Hl l l l l l l l l ll l l l l l l l l l...........在解析图像的时候(通过中文魔灯卡导出工具或cr2hdr解析),高光部分ISO H高光溢出,去除不要,用ISO l插值填补;同样,在暗区,ISO l低位截止,也摒弃,用ISO H插值填补;在中间值部分,ISO H降低亮度与ISO l混合成像。
2.为什么要用Dual ISO?当我们看到蓝天白云,美丽景色的时候,多想拍一张蓝天白云清晰可见,山水花木又历历在目。
但是,往往事与愿违,把蓝天白云拍摄清楚了(曝光准确了),山水就变暗了;反之,山水拍摄清楚了,天空就过曝了,失去了云彩的轮廓。
这是什么原因呢?是相机的宽容度不够。
Dual ISO是直接提高相机CMOS的感光宽容度,在双感光度下成像,提高低光区域亮度,减少噪声,保留高光区域细节,不至于高光溢出。
3.什么时候用Dual ISO?当场景亮区与暗区光比超过12EV时,即超出了相机的动态范围,就可以使用Dual ISO (双感光度)。
什么是EV?曝光值(Exposure Value):是由快门速度值和光圈值组合表示摄影镜头通光能力的一个数值。
曝光值每改变1EV,将改变一挡曝光,即改变曝光时间或光圈一档。
相机的动态范围多少?以佳能EOS 6D为例:ISO 100 动态范围11.4EVISO 200 动态范围11.4EVISO 400 动态范围11.2EVISO 800 动态范围10.9EVISO 1600 动态范围10.4EV也就是说佳能EOS 6D的动态范围不超过12EV,所以我们说超过12EV时,就可以使用Dual ISO(双感光度)。
维宏雕刻机运动控制系统

NcStudio用户手册感谢您选择了本公司的产品!本手册帮助您熟悉本公司的产品,了解系统组成配置等方面的信息,详细介绍系统安装过程及系统的各项功能。
在使用本系统之前,请您详细阅读本手册,这将有助于您更好地使用它。
由于硬件、软件的不断更新您所收到的软硬件在某些方面可能与本手册的陈述有所出入,在此谨表歉意。
注意以下事项:1) 不可带电插拔与电脑相连接的电缆;2) 不可带电插拔操纵盒电缆;3) 计算机或雕刻机外壳应接地线以保证安全并防止干扰;4) 机器不工作时请及时关掉电源;5) 长期不使用时请拔下电源插头;6) 主轴电机轴承寿命与其转速成反比;7) 雕刻刀十分锋利,运行时禁止用手触摸,以防伤害。
也不要用手帕,丝巾接触,以防卷入造成伤害或损坏设备。
目录1概述 ......................................................................................................- 1 -1.1系统特性 (2)1.2新增功能和新的改进 (4)2系统安装与连接 ..................................................................................- 5 -2.1N CSTUDIO™的系统基本配置 (6)计算机主机 ........................................................................................................................................ - 6 -操作系统 ............................................................................................................................................ - 6 -2.2N CSTUDIO™系统的安装 (6)安装Ncstudio™运动控制卡 ............................................................................................................. - 7 -安装Ncstudio™软件......................................................................................................................... - 7 -安装专用小键盘 .............................................................................................................................. - 10 -2.3卸载N CSTUDIO™系统 (10)2.4N CSTUDIO™控制卡与驱动系统的连接 (10)3NCSTUDIO™基本概念 ................................................................... - 12 -3.1操作模式与操作状态 (13)操作模式 .......................................................................................................................................... - 13 -操作状态 .......................................................................................................................................... - 13 -3.2机床坐标系 (14)机械坐标系 ...................................................................................................................................... - 15 -工件坐标系 ...................................................................................................................................... - 15 -4NCSTUDIO™操作界面 ................................................................... - 16 -4.1标题栏 (18)4.2菜单栏 (19)4.3工具栏 (20)4.4数控信息栏 (21)4.5状态栏 (22)4.6数控状态窗口 (22)时间信息 .......................................................................................................................................... - 23 -当前位置 .......................................................................................................................................... - 24 -进给速度 .......................................................................................................................................... - 25 -主轴速度 .......................................................................................................................................... - 26 -显示插补指令集 .............................................................................................................................. - 26 -4.7自动操作窗口 (26)4.8手动操作窗口 (28)4.9加工轨迹窗口 (31)三维视图模式 .................................................................................................................................. - 32 -清除功能 .......................................................................................................................................... - 32 -移动功能 .......................................................................................................................................... - 33 -缩放功能 .......................................................................................................................................... - 33 -居中功能 .......................................................................................................................................... - 34 -调整至窗口大小 .............................................................................................................................. - 35 -显示当前加工点 .............................................................................................................................. - 35 -属性 .................................................................................................................................................. - 36 -旋转功能 .......................................................................................................................................... - 37 -上下文菜单 ...................................................................................................................................... - 38 -4.10系统日志窗口 (38)日志清除功能 .................................................................................................................................. - 39 -日志信息显示选项 .......................................................................................................................... - 40 -上下文菜单 ...................................................................................................................................... - 41 -4.11程序管理窗口 (41)新建加工程序文件 .......................................................................................................................... - 42 -打开已有加工程序文件 .................................................................................................................. - 42 -编辑加工程序文件 .......................................................................................................................... - 43 -删除加工程序文件 .......................................................................................................................... - 44 -重命名加工程序文件 ...................................................................................................................... - 44 -装载加工程序文件 .......................................................................................................................... - 45 -4.12程序编辑窗口 (46)4.13输入输出状态(I/O状态)窗口 (47)5NCSTUDIO™菜单系统 ................................................................... - 48 -5.1“文件”菜单 (49)打开并装载 ...................................................................................................................................... - 49 -卸载 .................................................................................................................................................. - 51 -新建加工程序 .................................................................................................................................. - 51 -打开并编辑 ...................................................................................................................................... - 51 -编辑当前加工程序 .......................................................................................................................... - 51 -保存 .................................................................................................................................................. - 51 -另存为 .............................................................................................................................................. - 51 -保存并装载 ...................................................................................................................................... - 52 -关闭 .................................................................................................................................................. - 52 -最近装载的加工程序 ...................................................................................................................... - 52 -最近编辑的加工程序 ...................................................................................................................... - 53 -退出 .................................................................................................................................................. - 53 -5.2“编辑”菜单 (53)5.3“查看”菜单 (57)工具栏功能 ...................................................................................................................................... - 58 -状态栏功能 ...................................................................................................................................... - 58 -全屏功能 .......................................................................................................................................... - 58 -显示加工程序行号 .......................................................................................................................... - 58 -跟踪加工程序当前行 ...................................................................................................................... - 59 -加工程序信息 .................................................................................................................................. - 59 -5.4“操作”菜单. (60)单段执行 .......................................................................................................................................... - 60 -手轮引导 .......................................................................................................................................... - 61 -设置当前点为工件原点 .................................................................................................................. - 61 -设置当前点工件坐标 ...................................................................................................................... - 61 -回工件原点 ...................................................................................................................................... - 63 -保存工件原点 .................................................................................................................................. - 64 -读取工件原点 .................................................................................................................................. - 64 -开始 .................................................................................................................................................. - 64 -暂停 .................................................................................................................................................. - 65 -停止 .................................................................................................................................................. - 65 -进入仿真模式并开始仿真 .............................................................................................................. - 66 -高级开始 .......................................................................................................................................... - 66 -断点继续 .......................................................................................................................................... - 68 -执行加工指令 .................................................................................................................................. - 68 -微调 .................................................................................................................................................. - 72 -浮动对刀(可选功能) .................................................................................................................. - 73 -固定对刀(可选功能) .................................................................................................................. - 74 -回机械原点 ...................................................................................................................................... - 76 -回换刀位 .......................................................................................................................................... - 77 -限位释放 .......................................................................................................................................... - 77 -报警复位 .......................................................................................................................................... - 78 -设置参数 .......................................................................................................................................... - 78 -5.5“机床”菜单. (79)冷却开启 .......................................................................................................................................... - 79 -5.6“窗口”菜单. (79)显示自动窗口 .................................................................................................................................. - 80 -显示手动窗口 .................................................................................................................................. - 80 -显示加工轨迹窗口 .......................................................................................................................... - 80 -显示系统日志窗口 .......................................................................................................................... - 80 -显示程序管理窗口 .......................................................................................................................... - 80 -显示程序编辑窗口 .......................................................................................................................... - 80 -显示I/O状态窗口........................................................................................................................... - 80 -5.7“帮助”菜单. (80)每日提示 .......................................................................................................................................... - 81 -访问Ncstudio主页.......................................................................................................................... - 81 -6参数设置 ........................................................................................... - 82 -6.1参数修改权限 (83)6.2参数修改方法 (83)6.3操作员参数 (84)停止时停止主轴............................................................................................................................................ - 84 -工件坐标下限(X、Y、Z) ........................................................................................................................ - 85 -工件坐标上限(X、Y、Z) ........................................................................................................................ - 85 -启用工件坐标范围检查 ................................................................................................................................ - 85 -加工前须先回工件原点 ................................................................................................................................ - 86 -旋转轴编程单位............................................................................................................................................ - 86 -旋转工件直径................................................................................................................................................ - 86 -固定对刀块位置(X、Y、Z)..................................................................................................................... - 87 -回固定点有效................................................................................................................................................ - 87 -固定点位置(X、Y、Z) ............................................................................................................................ - 87 -G73_G83退刀量.......................................................................................................................................... - 88 -G76_G87定向钻头停止方向...................................................................................................................... - 88 -检查双驱动轴同步误差 ................................................................................................................................ - 88 -双驱动轴同步误差限 .................................................................................................................................... - 89 -手动低速........................................................................................................................................................ - 89 -手动高速........................................................................................................................................................ - 90 -微调速度........................................................................................................................................................ - 90 -微调步距........................................................................................................................................................ - 90 -快速横移速度................................................................................................................................................ - 91 -默认进给速度................................................................................................................................................ - 91 -使用默认进给速度 ........................................................................................................................................ - 91 -使用默认主轴速度 ........................................................................................................................................ - 92 -使用Z向下刀速度........................................................................................................................................ - 92 -Z向下刀速度 ................................................................................................................................................ - 92 -暂停时Z轴提刀量........................................................................................................................................ - 93 -安全高度........................................................................................................................................................ - 93 -圆弧限速有效................................................................................................................................................ - 94 -圆弧IJK增量方式有效 ................................................................................................................................ - 94 -圆弧半径公差................................................................................................................................................ - 94 -文件翻译参数................................................................................................................................................ - 95 -空行程移动时抬刀高度 ................................................................................................................................ - 95 -PLT单位........................................................................................................................................................ - 95 -PLT区域加工时刀间距 ................................................................................................................................ - 95 -二维文件加工深度 ........................................................................................................................................ - 96 -DXF中使用首点作为零点 ........................................................................................................................... - 96 -换刀时暂停并提示换刀 ................................................................................................................................ - 96 -6.4厂商参数 (97)主轴最大转速................................................................................................................................................ - 98 -主轴默认转速................................................................................................................................................ - 99 -主轴启动停止延时 ........................................................................................................................................ - 99 -轴方向(X、Y、Z) .................................................................................................................................. - 100 -脉冲当量(X、Y、Z) .............................................................................................................................. - 100 -工作台行程下限(机械坐标)(X、Y、Z)............................................................................................. - 100 -工作台行程上限(机械坐标)(X、Y、Z)............................................................................................. - 101 -启用工作台行程范围检查(X、Y、Z)................................................................................................... - 101 -正向限位开关输入端口(X、Y、Z)....................................................................................................... - 101 -负向限位开关输入端口(X、Y、Z)....................................................................................................... - 102 -驱动器报警输入端口(X、Y、Z)........................................................................................................... - 102 -驱动器报警复位端口(X、Y、Z)........................................................................................................... - 102 -驱动器报警输出端口 .................................................................................................................................. - 103 -限位时禁止往限位方向运动 ...................................................................................................................... - 103 -外部轴编码器数据有效 .............................................................................................................................. - 103 -编码器方向(X、Y、Z) .......................................................................................................................... - 104 -编码器脉冲当量(X、Y、Z)................................................................................................................... - 104 -编码器最大稳态允差(X、Y、Z)........................................................................................................... - 104 -编码器最大动态允差(X、Y、Z)........................................................................................................... - 105 -检查外部轴编码器误差 .............................................................................................................................. - 105 -紧停取消回机械原点状态 .......................................................................................................................... - 105 -机械原点位置(X、Y、Z) ...................................................................................................................... - 106 -粗定位阶段方向(X、Y、Z)................................................................................................................... - 106 -粗定位阶段速度(X、Y、Z)................................................................................................................... - 106 -粗定位开关的输入端口号(X、Y、Z)................................................................................................... - 107 -精定位阶段方向(X、Y、Z)................................................................................................................... - 107 -精定位阶段速度(X、Y、Z)................................................................................................................... - 107 -精定位开关的输入端口号(X、Y、Z)................................................................................................... - 108 -回退距离(X、Y、Z) .............................................................................................................................. - 108 -丝杠误差补偿有效 ...................................................................................................................................... - 108 -仅反向间隙补偿有效 .................................................................................................................................. - 109 -反向间隙(X、Y、Z) .............................................................................................................................. - 109 -过象限补偿有效.......................................................................................................................................... - 109 -过象限补偿参数.......................................................................................................................................... - 110 -输入端口极性.............................................................................................................................................. - 111 -输出端口极性.............................................................................................................................................. - 112 -紧停状态输出端口映像 .............................................................................................................................. - 112 -复位状态输出端口映像 .............................................................................................................................. - 112 -浮动对刀块厚度.......................................................................................................................................... - 113 -浮动对刀块输入端口号 .............................................................................................................................. - 113 -固定对刀块输入端口号 .............................................................................................................................. - 113 -手动正向按钮输入端口号(X、Y、Z)................................................................................................... - 114 -手动负向按钮输入端口号(X、Y、Z)................................................................................................... - 114 -紧停按钮输入端口号 .................................................................................................................................. - 114 -限位释放按钮输入端口号 .......................................................................................................................... - 115 -其他紧停输入点端口掩码 .......................................................................................................................... - 115 -进给倍率修调开关有效 .............................................................................................................................. - 115 -主轴倍率修调开关有效 .............................................................................................................................. - 116 -键盘紧停键有效.......................................................................................................................................... - 116 -支持鼠标...................................................................................................................................................... - 116 -主轴输出端口号.......................................................................................................................................... - 117 -润滑油泵输出端口号 .................................................................................................................................. - 117 -定期自动启动润滑油泵 .............................................................................................................................. - 118 -机床运行才允许进行润滑 .......................................................................................................................... - 118 -启动润滑油泵时间间隔 .............................................................................................................................. - 118 -润滑油泵开启时间 ...................................................................................................................................... - 119 -双驱动轴轴号.............................................................................................................................................. - 119 -双驱动轴机械原点差值 .............................................................................................................................. - 119 -手轮有效...................................................................................................................................................... - 120 -严格手轮脉冲计数 ...................................................................................................................................... - 120 -手轮脉冲方向.............................................................................................................................................. - 120 -手轮倍率X1档 ........................................................................................................................................... - 121 -手轮倍率X10档......................................................................................................................................... - 121 -手轮倍率X100档....................................................................................................................................... - 121 -手轮引导乘子.............................................................................................................................................. - 122 -手轮加速度.................................................................................................................................................. - 122 -各轴最大速度(X、Y、Z) ...................................................................................................................... - 122 -起跳速度...................................................................................................................................................... - 123 -单轴加速度.................................................................................................................................................. - 123 -转弯加速度.................................................................................................................................................. - 123 -加加速度...................................................................................................................................................... - 124 -参考圆半径.................................................................................................................................................. - 124 -参考圆的最大速度 ...................................................................................................................................... - 124 -圆弧运动的最小速度 .................................................................................................................................. - 125 -准停时间...................................................................................................................................................... - 125 -刀具补偿有效.............................................................................................................................................. - 126 -减振级别...................................................................................................................................................... - 126 -平滑时间...................................................................................................................................................... - 126 -转角容差...................................................................................................................................................... - 127 -坐标基准...................................................................................................................................................... - 127 -7专用小键盘操作说明 ..................................................................... - 128 -8操作步骤 ......................................................................................... - 131 -8.1开机 (132)8.2机械复位(可选) (132)8.3载入加工程序 (132)8.4手动操作 (132)8.5确定工件原点 (133)8.6执行自动加工 (133)开始自动加工 ................................................................................................................................ - 133 -机床停止 ........................................................................................................................................ - 134 -机床暂停 ........................................................................................................................................ - 134 -程序跳段执行 ................................................................................................................................ - 134 -。
深圳显控触摸屏用户手册

深圳显控 SamDraw 组态软件
用户手册 V3.3
注意 (1) 未经同意,不得对本书的部分或全部内容进行转载、复制。 (2) 本手册的内容,包括规格会有所变动,恕不另行通知。 (3) 本书力求严谨,若您发现不明、错误之处,请与手册卷末公司地址联络,并告知手 册封面上的编号
关于商标等事项 ●Windows 是美国Microsoft 公司的注册商标。 ●可编程序控制器(PLC)名称为各公司的产品。
安全注意事项 在此将安全注意事项分为[危险]、[注意]两种。 危险:误操作会引起险情,有可能造成死亡或重伤。 注意:误操作会引起险情,有可能造成中度损伤或轻伤。 但标记为注意的事项在某种场合会造成严重事故。 请务必遵守记载事项。
警 告
● 在安装、拆卸、连接导线、保养或检测之前,请将电源关闭,否则会导致触电、误操 作或故障发生。 ● 请在触摸屏外部设置紧急停止回路、连锁装置等。否则触摸屏发生故障会引起机械损 坏或造成事故。 ● 通电时请不要触摸端子等有电部分。否则会引起触电。
注 意
● 请不要使用在开箱时发现已损坏或变形的产品,否则会导致故障或误操作。 ● 请不要使本机受到如坠落或翻倒等类似冲击,否则会造成产品损坏、故障。 ● 请在操作说明书及使用手册规定的环境下保管及使用。 在高温、多湿、结霜、灰尘、腐蚀性气体、油污、有机溶剂、润滑剂、大振动、冲击 等环境下保管及使用,有可能造成触电、火灾、误动作等故障。 ● 请在确保安全的情况下,在运行中传送画面数据。否则有可能因误操作造成机械破损 或故障。 ● 在软件工作中(与连接设备通讯)请不要关闭电源,否则会造成数据丢失、机器损坏 或故障。 ● 请在手册中规定的软件动作环境下使用及操作。否则会造成故障、误动作。 ● 确实连接通信电缆并紧固。否则有可能造成故障、误动作。
Sony Ericsson VH700 蓝牙喇叭手机耳机说明书

User guide VH700Contents1 (3)2 (4)Headset overview (4)Introduction (4)Charging (4)Turning on and off (4)Pairing the headset (5)Multipoint (5)Call handling (5)Battery (6)Resetting the headset (6)Troubleshooting (7)Industry Canada Statement (7)Declaration of Conformity for VH700 (8)Headset overviewSee illustration 1.1Microphone2Call handling key3Microphone4Volume keys5Charger connector6Clip7On/off key8Indicator lightIntroductionThe Bluetooth™ Noise Shield Handsfree VH700 can be connected to any device with Bluetooth wireless technology that supports the headset or headset profile. This User guide focuses on use with a Sony Ericsson mobile phone.ChargingBefore using the headset for the first time, you need to charge it with the supplied charger for 8 hours. See illustration 2. The normal charging time is 2.5 hours. Use Sony Ericsson chargers only.Turning on and offTo turn on the headset•Press and hold down until the indicator light shows a steady green or red light. If the light is red, the headset needs charging. After 3 seconds, the lightturns off and the headset is on.To turn off the headset•Press and hold down until the indicator light shows a green or red light. If the light is red, the headset needs charging. After 3 seconds, the light turns off andthe headset is off.Pairing the headsetPairing the headset with a phoneTo use the headset with a phone, you need to pair the headset with the phone. After successful pairing, the headset connects automatically to the phone as soon as the headset is turned on and within range.To pair the headset with a phone1Make sure the headset is turned off.2Turn on the Bluetooth function in the phone. For instructions, see the phone User guide.3Turn on Bluetooth visibility in the phone. This makes the phone visible to other Bluetooth devices.4Place the phone within 20 cm (8 inches) of the headset.5Press and hold down on the headset for about 5 seconds until the indicator light flashes green and red alternately.6Auto pairing in your phone: When asked to add the VH700, follow the instructions that appear.7Normal pairing in your phone: Search for and add a new device.8If a passcode is required, enter 0000.Pairing the headset with another phoneTo use the headset with another phone, you need to pair the headset with the phone.After successful pairing, the headset connects automatically to the phone as soon as the headset is turned on and within range.To pair the headset with another phone1Make sure the headset is turned off.2Turn on the Bluetooth function in the other phone. For instructions, see the phone User guide.3Place the other phone within 20 cm (8 inches) of the headset.4Press and hold down on the headset for about 5 seconds until the indicator light flashes green and red alternately.5In the other phone: Search for and add a new device.6If a passcode is required, enter 0000.MultipointWith this feature, you can use the headset with two different phones at the same time. Before you use this feature, you need to enable it.To enable the multipoint feature1Make sure the headset is turned off.2Press and hold down on the headset until the indicator light flashes green and red alternately.3Multipoint mode: Press and hold down the plus sign on the volume key. Two orange flashes on the indicator light shows that multipoint has been enabled.4Singlepoint mode: Press and hold down the minus sign on the volume key. One orange flash on the indicator light shows that singlepoint has been enabled.When the headset is in multipoint mode, you cannot answer a second call on the same phone.Call handlingTo make a call•Dial the number using the phone keys. The call is automatically activated in the headset.To end a call•Press the call handling key briefly.To answer a call• A beep indicates an incoming call. Press the call handling key briefly.To reject a call•Press and hold down the call handling key until you hear a short beep (after 2 seconds).To re-dial a number•Double-click the call handling key.To answer a second call•Press the call handling key. The ongoing call is put on hold.To switch between two calls•Press and hold down the call handling key until you hear a beep.To mute the microphone during a call•Press both volume keys simultaneously. A beep indicates that the microphone has been muted. To turn on the microphone again, press both volume keyssimultaneously.To change the ear speaker volume•During a call, press a volume key.Transferring soundTo transfer the sound from the headset to the phone•See Transferring sound to and from a Bluetooth handsfree in the phone User guide.To transfer the sound from the phone to the headset•During a call on the phone, press the call handling key briefly.BatteryA battery that has been infrequently used, or a new one, could have reducedcapacity. You may need to recharge it a number of times. When the battery level is low, the indicator light flashes red and you hear a low beep. If you do not charge the headset, it turns off after 10 minutes.Resetting the headsetReset the headset if it behaves unexpectedly. Resetting the headset removes all information about paired devices.To reset the headset•Press and hold down for 10 seconds.To reset the headset to factory settings•Simultaneously press and hold down and the call handling key during pairing mode.TroubleshootingRedial does not work•Make sure the call list in the phone is not empty.•Make sure the correct calling device is selected.•Make sure your phone or other device supports the Bluetooth handsfree profile.The headset is automatically turned off•The battery level is too low. You hear a beep approximately 10 minutes before the headset turns off. Charge the battery.•The headset turns off if you do not pair it with the phone within 10 minutes.Unexpected behaviour•Reset the headset.No connection to the phoneMake sure the headset is charged and within range of the phone. We recommend a maximum distance of 10 metres (33 feet) with no solid objects in between. Check or reset the Bluetooth settings in the phone. Pair the headset with the phone again.FCC StatementThis device complies with Part 15 of the FCC rules. Operation is subject to the following two conditions: (1)This device may not cause harmful interference, and (2) This device must accept any interference received,including interference that may cause undesired operation.Any change or modification not expressly approved by Sony may void the user's authority to operate theequipment.This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant toPart 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmfulinterference in a residential installation. This equipment generates, uses and can radiate radio frequency energyand, if not installed and used in accordance with the instructions, may cause harmful interference to radiocommunications. However, there is no guarantee that interference will not occur in a particular installation.If this equipment does cause harmful interference to radio or television reception, which can be determined byturning the equipment off and on, the user is encouraged to try to correct the interference by one or more ofthe following measures:•Reorient or relocate the receiving antenna.•Increase the separation between the equipment and receiver.•Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.•Consult the dealer or an experienced radio/TV technician for help.Industry Canada StatementThis device complies with RSS-210 of Industry Canada.Operation is subject to the following two conditions: (1) this device may not cause interference, and (2) this device must accept any interference, including interference that may cause undesired operation of the device.This Class B digital apparatus complies with Canadian ICES-003.Cet appareil numérique de la classe B est conforme à la norme NMB-003 du Canada.Declaration of Conformity for VH700We, Sony Ericsson Mobile Communications AB ofNya VattentornetSE-221 88 Lund, Swedendeclare under our sole responsibility that our productSony Ericsson type DDA-0002026and in combination with our accessories, to which this declaration relates is in conformity with the appropriate standards EN 300 328:V1.7.1, EN 301 489-7:V1.3.1, EN 301 489-17:V2.1.1 and EN 60 950-1:2006 following the provisions of, Radio Equipment and Telecommunication Terminal Equipment directive 1999/5/EC.Lund, January 2010Jacob Sten,Head of Product Business Unit AccessoriesWe fulfil the requirements of the R&TTE Directive (1999/5/EC).Sony EricssonVH700Prior to use, please read the Important information leaflet separately provided.This User guide is published by Sony Ericsson Mobile Communications AB or its local affiliated company,without any warranty. Improvements and changes to this User guide necessitated by typographical errors,inaccuracies of current information, or improvements to programs and/or equipment, may be made bySony Ericsson Mobile Communications AB at any time and without notice. Such changes will, however, beincorporated into new editions of this User guide.All rights reserved.©Sony Ericsson Mobile Communications AB, 2010Publication number: 1239-2763.1Bluetooth is a trademark or a registered trademark of Bluetooth SIG Inc. and any use of such mark bySony Ericsson is under license.Interoperability and compatibility among Bluetooth™ devices varies. Device generally supports productsutilizing Bluetooth spec. 1.2 or higher, and Headset or Handsfree profile.The Liquid Identity logo is a trademark or registered trademark of Sony Ericsson Mobile Communications AB.Sony and "make.believe" are trademarks or registered trademarks of Sony Corporation.Ericsson is a trademark or registered trademark of Telefonaktiebolaget LM Ericsson.。
陀螺仪
学习直升机基础知识陀螺仪陀螺仪的功用直升机飞行的基本原理是利用主旋翼(main rotor,main blade,propeller)可变角度产生反向推力而上升,但对机身会产生扭力(torque force)作用,于是需要加设一个尾旋翼(tail)来抵消扭力,平衡机身,但怎样使尾旋翼利用合适的角度,来平衡机身呢?这就用到陀螺仪(gyro)了,它可以根据机身的摆动多少,自动作出补偿讯号给伺服器(servo),去改变尾旋翼角度,产生推力平衡机身。
以前,模型直升机是没有陀螺仪的,油门、主旋翼角度和尾旋翼角度很难配合,起动后便尽快往上空飞(因为飞行时较易控制),如要悬停就要控制杆快速灵敏的动作,所以很容易撞毁,现在已有多中直升机模型使用的陀螺仪,分别有机械式、电子式、电子自动锁定式。
有下列几类:1. 机械式陀螺仪,较便宜的一种。
分一段及两段灵敏度调校的型号,耐震较弱。
2. 电子晶体震动陀螺仪(Piezzo),效能较高,需配合特别舵机。
由於输出讯号较多,故耗电率高,价钱固然高一些啦。
3. 电子定向陀螺仪(Head Lock Gyro),它的操作和平常的陀螺仪不同,方向性有极高表现。
操纵尾舵时需要小心,它需要作反向操纵才能回复直线飞行,即是一经操纵转舵,便继续转弯直至你作反向修正。
地面效应当直升机接近地面时会产生地面效应,直升机离地滞空时,旋翼把空气向下抽,因此旋翼和地面之间的空气密度变大,形成气垫效果,浮力会变佳,离地越近,效果越佳,但是因为空气被压缩,无处逸散而产生乱流,导致停悬的不稳定,所以R/C直升机在接近地面时会呈现不稳定现象而比较难控制,产生这种气垫效果的高度大约是旋翼面直径的一半左右。
反扭力高速转动的主旋翼,有一定的速度和质量,除了会产生陀螺效应外,更有反扭力的产生,尾旋翼主要的功用就是平衡反扭力使机身不自转,但现在的R/C 直升机均采用可变攻角形态,油门的加减,攻角的变化...等因素使得反扭力千变万化,尾旋翼产生的平衡力也要跟著快速变化,以保持机身的稳定,现在的R/C 直升机采用各种的措施来平衡瞬息万变的反扭力。
GM700 安装启动和调试

GM700 启动——光路准直 GM 700 – STARTUP OPTICAL ALIGNMENT
GPP探杆光路准直的初始位置 Start Position for Optical Alignment GPP only
光路准直目标点 Optical alignment target
Tips: 准直的时候,可以通过 EvU界面Maint菜单里的 Adj. Opt. Align,查n optical alignment,check the PM value through EVU menu, Maint Adj. Opt. Align。We can see the target when the value approx 1000.
Date
Therefore, the zero of the GM should be known or a zero adjustment should be carried out prior to this initial gas test. 首先零点的GM数值必须获得或者零点校准在标气校准测试之前已经执行。 Connect cylinder to test gas port on GPP. 连接标气到GPP探杆的标气接口。 Open valve and monitor the analyzer readings.打开压力阀并观察仪器的数值。 Start with approx. 0.5bar / 500hPa / 7psi and increase / decrease until zero is reached for all components. 启始压力大约在0.5bar/500hpa/7psi,增加或者减小压力直至所有的组分数值到零。 Decrease cylinder pressure until the readings start to rise and increase the pressure by approx. 0.5bar. 减小表气瓶压力直到读数开始上升,这时候增加压力约0.5bar。 Read the setting on the cylinder regulator as well as the pressure inside the filter for future use with all gas tests. 读取标气瓶上的压力数值也就是过滤器内部的压力用于以后所有的标气压力设置。 Cut the gas flow off and read the pressure insdie the filter (=duct pressure). 关掉压力阀然后读取过滤器内部的压力(烟道压力) Pressure difference usually turns out between 4 ... 12 hPa(500mm), 30hPa(750mm) (flow approx. 7L/min 20L/min) 压力差一般跟滤芯长度有关系,4-12hpa(500mm),30hpa(750mm),(流量 大约 7L/min 20L/min).
G20 锁尾陀螺仪 说明书

螺仪上。
强烈建议使用附带的不锈钢减震片,可有效过滤震动保障飞行品质!旋翼长度大于300mm的直升机,以及所有油动直升机。
典型450级。
旋翼长度小于300mm的小型直升机。
典型200,250级。
强烈建议使用速度快于0.1s/60°的数码舵机。
启动状态上电后陀螺仪进入启动过程,过程中会保持机身静止,且方向舵需保持中立位置R5闪烁: 正在识别方向舵中立位置,持R4闪烁: 正在预热和校准传感器,持若R4常亮请保持机身静止。
飞行状态进入设置状态:设置状态在飞行状态的锁尾模式设置状态。
进入设置状态的方向舵进行,无需携带左侧的L ED表示设置左侧L ED闪烁表示正在选择设置项和调整参数值:菜单中前一个设置项后一个设置项设置项中前一个值/值-1后一个值/值+1进入和离开设置项:2秒将进入或离开设置即开始为某一设置项调整参数返回设置项菜单。
设置项时将保存设置。
电则放弃设置。
离开设置状态:3秒将离开设置状态并状态。
项中或在菜单中都可直接离设置状态。
设置状态时将自动保存设置。
电则放弃设置。
1.切换到非锁尾模式,保持发射机方向舵(需要重新安装舵臂固定螺丝)。
2.连接舵机与连杆。
调整连杆长度或舵机位置,使有大约有10°夹角。
简易安装也可使尾滑块3.设置陀螺的L imit以及调整舵臂长度,使尾舵故障排除飞机不受控的快速交替摆动(追尾,金鱼尾)。
尽可能减少机械虚位和松动:确保尾保尾连杆不弯曲。
尝试逐步降低发射机上的感度设置,直至飞机无规律的摆动。
尽可能减少飞机的震动:确保主轴、确保尾旋翼不缺损。
使用附带的滤震钢片和海绵胶安装。
若降低陀螺仪R sps设置项的值。
无法离地,飞机完全不受控的逆时针旋转。
调整陀螺仪Dir设置项。
飞机缓慢而持续的往一个方向转动。
确保发射机的TR IM设置为0。
确保陀螺仪启动时飞机静止不动。
海康威视用户使用手册
目录1 产品介绍 (5)1.1 产品概述 (5)1.2 产品主要功能 (5)2安装说明 (8)2.1 清点设备及其附件 (8)2.2 安装硬盘 (8)2.3 后面板物理接口说明 (9)2.3.1 HC、HT、HF后面板说明 (9)2.3.2 1/2/3/4路HC及2路HT设备的后面板说明 (10)2.3.3 HS设备的后面板说明 (11)2.4 报警线连接说明 (14)3 操作必读 (15)3.1 前面板说明 (15)3.2 遥控器说明 (19)3.3 菜单项说明 (21)3.3.1 菜单导航 (21)3.3.2 菜单操作方法 (22)3.4 输入法说明 (23)4 基本操作指南 (24)4.1 开机 (24)4.2 预览 (24)4.3 登录及修改用户名密码 (25)4.4 云台控制 (27)4.5 手动录像 (28)4.6 回放 (29)4.7 录像资料备份 (32)4.8 语音对讲 (34)4.9 辅口输出控制 (34)4.10 关机 (35)5参数设置操作指南 (36)5.1 管理员及其密码 (36)5.2 创建与删除用户 (37)5.3 修改设备名称与设备号 (40)5.4 视频输出制式与VGA设置 (40)5.5 OSD设置 (41)5.6 视频输入参数设置 (43)5.7 区域遮盖设置 (44)5.8 遮挡报警处理 (45)5.9 视频丢失处理 (46)5.10 移动侦测处理 (48)5.11 本地预览属性设置 (51)5.12 录像参数及录像计划表 (53)5.13 报警输入输出设置 (57)5.14 网络参数 (60)5.15 解码器 (61)5.16 串口参数设置 (64)5.17 异常处理 (68)5.18 交易信息 (69)6 管理工具 (71)6.1 保存设置 (71)6.2 恢复出厂设置 (72)6.3 升级 (72)6.4 硬盘管理 (72)6.5 清除报警 (72)6.6 重新启动 (72)6.7 关机 (73)6.8 日志 (73)6.8.1 按类型查询 (73)6.8.2 按时间查询 (74)6.8.3 按类型&时间查询 (74)6.9 查看系统信息 (74)7 网络硬盘录像机软件升级 (75)7.1 配置FTP服务 (75)7.2 升级方式 (76)附录1 安装硬盘总容量的参考计算方法 (77)附录2 设备连接线的制作方法 (78)1 RS-485连接线制作方法 (78)2 UTP网络连接线制作方法 (78)3 RS-232连接线制作方法 (79)附录3 技术指标 (82)附录4 常用功能速查表 (83)附录5 常见故障解答 (85)1 产品介绍1.1 产品概述本设备是专为安防领域设计的一款优秀的数字监控产品。
LG CBG-700 拍照精灵 使用说明书

服务点或经销商处以寻求帮助。 • 锂离子电池属于危险组件,可能会导致人身伤害。 • 由非合格专业人员更换电池可能会损坏设备。 • 请勿自行更换电池,否则可能会损坏电池,导致过热和
用户手册
CAM Plus
LG拍照精灵 与所有国家/地区的 G5 兼容 (韩国、加拿大和 AT&T 除外)
REV 3.0 CN
简体中文
用户手册
CAM Plus
LG拍照精灵 与所有国家/地区的 G5 兼容 (韩国、加拿大和 AT&T 除外)
保留所有权利。 LG Electronics Inc.,2016
视产品规格而定,某些功能可能无法使用。 8
连接 插入电池 1 对齐电池和模块上的箭头,将电池端子牢固连接到模块。
2 将电池与下边缘对齐,小心地将模块滑回设备内。
• 将模块插入设备中时,切勿按模块弹出键。 • 将电池插入设备中时,确保电池已连接到模块。
9
取出电池 1 按模块弹出键以将模块从设备中弹出一部分。
本产品的环保使用期限标识如图所示。 该标识的环保使用期限以本说明书中所述的正常使用 条件为基准。
17
有限保修 根据此有限保修的条件,LG Electronics 保证本产 品自消费者最初购买产品的时间起并在随后的一 (1) 年时期内在设计、材料和制造工艺上无缺陷。如果您 的产品需要保修服务,请将它退回到原来购买它时的 经销商,或者联系您本地的 LG Electronics 联系中 心以获得其它信息。
载和安装),可以执行固件升级(支持的操作系 统:Android 6.0(M 操作系统)或以上版本)。 • 也可以通过使用 LG Friends Manager 应用程序来进 行固件升级。
cgy750中文说明书(1.31)

CGY7501.31版本说明书基本操作:主界面按MODE+-:查看某些信息主界面按DATA+-,各大选项之间循环切换当切换到需要进入的大选项,显示为某某Basic界面,按MODE+-,则进入大选项,在其子选项之间切换当切换到需要设定的子选项,按DATA+-,对选项值进行增减和修改当切换子选项回到Basic界面后,DATA+-重新变为切换大选项,而不是修改选项值在Basic界面长按DATA+-,会切换到此大项的Expert专家界面,次后的操作同Basic,需要返回Basic则在Expert界面长按DATA+-RUD.Gyro Basic尾巴基本菜单:ServoTyp舵机类型:Analog模拟,1520数字宽频,760数字窄频GY.Dir修正方向:注意是修正方向,不是控制方向,控制需要反向去遥控器里设置Sv.Limit舵机行程限制:配合遥控器的方向摇杆,左右行程可以分开设置FLT.Mode飞行模式:此项决定飞行手感,Sport柔和,3D暴力AIL.Gyro Basic副翼基本菜单:AIL.Dir修正方向:注意是修正方向,不是控制方向,控制需要反向去遥控器里设置AGn:100%副翼感度:如果没有使用遥控器控制感度,此处就是副翼感度;如果使用遥控器控制感度,此处感度值与遥控器的值相乘才是最终感度Wrk.Mode工作模式:CMT由感度决定速率/锁定模式,Normal仅使用速率模式,AVCS仅使用锁定模式ELE.Gyro Basic升降基本菜单:与副翼基本菜单相同SWASHset Basic斜盘基本菜单:SWASHTyp斜盘类型:一般都是用H3-120,也就是三舵机120度CCPM ServoTyp舵机类型:An:90模拟,DG:285对应旧版本的DG:1520,95、140则是为了兼容低频率的数字舵机HeliSize直升机大小:选择机型大小,此选项预置了一些细节设置,会修改到某些高级选项的参数值FLT.Mode飞行模式:数值越大越暴力,此选项预置了一些细节设置,会修改到某些高级选项的参数值Servo Dir Comb#1:决定单个舵机正反向;每个舵机有2个方向,3个舵机一起则是2x2x2=8个选项,总有一两种是正确的;如果运动正确只是舵面反向,需要在遥控器设置反向;此项取代了1.1版本三个舵机分别设置正反向,个人觉得没有1.1的好用AIL.Ntr/ELE.Ntr/PIT.Ntr:舵机中立点微调,也就是sub strim功能AIL.Rate/ELE.Rate/PIT.Rate:三个舵面的行程比例调整,也就是AFR功能,遥控器上end point行程与此处的值相乘后得到最终行程SWS.Ring斜盘修圆:功能同遥控器的修圆STK.Dir AIL.Rt:此项校准最大副翼,使提前补偿功能更好的运作;用法是副翼右打满,按DATA+-STK.Dir ELE.Up:此项校准最大升降,使提前补偿功能更好的运作;用法是升降上打满,按DATA+-Pit.Low:此项校准最小螺距,使提前补偿功能更好的运作;用法是默认螺距曲线时,油门杆最低,按DATA+-Pit.Zero:此项校准0螺距,使提前补偿功能更好的运作;用法是默认螺距曲线时,油门杆置中,按DATA+-Pit.High:此项校准最大螺距,使提前补偿功能更好的运作;用法是默认螺距曲线时,油门杆最高,按DATA+-F/F.Mix提前补偿:此选项包含10个预设值,对高级界面下的所有补偿选项都有影响;0不补偿,值越大补偿越多,1-10对应的高级界面的具体数值请见1.3版本改动说明里的对照表Phase Equ相位均衡器:具体功能不明,只知道开启此项需要先设好定速器里的旋转头RPM和旋转方向ROT.Equa:自旋优化的开关,1.2版本新加入的好东西Equa.Dir自旋优化方向:进入此项后斜盘会往后倾斜,转动机身,如果倾斜方向像指南针一样不变,则设置正确;如果不是就设置反向;如果没反应,请检查前面一项ROT.Equa是否开启ROT.Trak旋转头轨迹:此项设置难度较大,需要飞起来自旋观察,改变数值使自旋过程中旋翼头保持水平ROT.His自旋优化死区:缓慢自旋速度低于设定值时,则不启用自旋优化功能;5.5dgt对应1度/秒Governor Basic定速基本菜单:RPMSet:1转速设置:设置定速锁定的转数值,需要设置三个转速值Gear.Rt齿比:大齿齿数/马达齿齿数=齿比;正确的齿比能让定速器更准确的计算转速ServoTyp:油门舵机类型,模拟或者数字Stick.SW:是否把油门杆作为定速开关;当油门值高于设置值时开启定速On/OffSW:指定某个遥控器开关作为定速开关B/FS.Set:低压保护,当接收电压低到某个水平,油门会自动降低到设定的值p偏航补偿:此项设定旋转方向和传感器安装方向,以保证其他补偿选项正确运作Pole.Nmb无刷电机级数:如果使用无刷电感探头,请设置正确的电机级数;如果使用物理探头就设置为2PS.BUS Basic:sbus基本菜单可以对每个输入通道的功能进行自定义,需要使用遥控器设置副翼升降感度的话需要指定AGN和EGN对应的通道Gyro Expert尾巴高级菜单:RUD.Ntr:尾舵机中立点调整,相当于遥控器的sub strim选项GY.Gain陀螺基本感度:此数值与遥控器的感度值相乘才得到最终感度值EXP.AVC:功能同遥控器的EXP,需要注意的是配合遥控器上感度切换,AVC和NOR是分开设置的Dly.Mode延迟模式:fuction柔和,constant直接暴力CNT.DlIn控制启动延迟:摇杆从中立点往两边摇动控制的延迟,数值越小越直接,越大越柔和,就像摇杆增加了阻力CNT.Dout控制回中延迟:摇杆从两边回中的延迟,数值越小越直接,越大越柔和,就像摇杆增加了阻力Stop.Dly尾舵机回中的延迟:数值越大越柔和以上几项延迟就算最小也不会带来负面影响,喜欢硬的感觉就弄成最小,手法暴力的话加点点延迟能减小回弹Wrk.Mode工作模式:CMT由感度决定速率/锁定模式,NORMAL仅使用速率模式,AVCS仅使用锁定模式ANG:450D:最大自旋角速度,如果实际自旋超过此速度,将会被限制为设定的速度CG.Dlinc感度提高延迟:当3D切换普通模式后,转速下降需要一点时间,如果感度立刻变大可能导致抖动;此项调整感度由低到高的延迟G.DlyDec感度降低延迟:当普通切换3D模式后,转速上升需要一点时间,如果感度立刻变小可能锁不住;此项调整感度由高到低的延迟RUD.His方向杆死区:调整摇杆中立点附近的无控制区域;如果摇杆中立点模糊,或者总是会不经意的自己打舵,则加大死区;如果感觉碎舵不跟手,则减小死区G.Track感度跟随:具体效果不明,英文翻译为调整左右自旋时陀螺感度F/F.Mix提前补偿:总距变化导致掉转,从而影响锁尾能力;此项能够根据总距输入提前增加修正量,提高锁尾能力F/F.Rate提前补偿比例:调整提前补偿的幅度ACC.Gain提前补偿加速度:总距慢速和***变化相同幅度,需要的瞬间补偿量是不一样的;此项调整加速度比例,对突然变化的总距使用更多的补偿量Sen.Mode传感器模式:传感器反应速度,Moderate一般,Middle中,Quick快;一般来说Moderate就很好了,小飞机用中或者快可能更好,但是抗震能力会下降Ntr.Obsr中立点补偿:飞机悬停1秒后陀螺会记住此时的中立点,当完成动作后回到这个中立点一般都能锁的很好;3D暴力动作使中立点也大幅度变化,这时本功能将不能正常工作Yaw.Smth自旋平滑:打开后自旋比较平滑不会忽快忽慢,关闭后反应更灵敏StpBoost刹车强度:增大数值刹车更硬,但可能引起回弹RESET重置:恢复尾巴的出厂设置值AIL.Gyro Expert副翼高级菜单:EXP.AVCS:功能同遥控器的EXP,需要注意的是配合遥控器上感度切换,AVC和NOR是分开设置的AIL.DlIn控制启动延迟:摇杆从中立点往两边摇动控制的延迟,数值越小越直接,越大越柔和,就像摇杆增加了阻力AIL.Dout控制回中延迟:摇杆从两边回中的延迟,数值越小越直接,越大越柔和,就像摇杆增加了阻力Stop.Dly舵机回中的延迟:数值越大越柔和以上几项延迟就算最小也不会带来负面影响,喜欢硬的感觉就弄成最小,手法暴力的话加点点延迟能减小回弹AVCS.Dmp锁定衰减:此项决定整体锁定效果,影响飞行风格;具体效果不明Cnt.feel手感:减小会比较暴力跟手,增大则柔和连贯Dead Band副翼杆死区:调整摇杆中立点附近的无控制区域;如果摇杆中立点模糊,或者总是会不经意的自己打舵,则加大死区;如果感觉碎舵不跟手,则减小死区Rate.Cst速率常数:此项影响翻滚的连贯性;具体效果不明ANG.Rate:最大翻滚角速度,如果实际翻滚超过此速度,将会被限制为设定的速度I.Gain积分感度:也叫累积感度,数值过低的话,总距干涉副翼的现象会比较严重,过高则导致飞行中抖动与回弹;推荐100D.Gain微分感度:也叫瞬间感度,主要影响手感,降低则手感偏软,太高会导致操作中抖动和回弹;推荐100Stp.Gain停止感度:如果摇杆回中有回弹,则增加此值;注意是增加不是减小,推荐120;此项与D.Gain的区别是D.Gain影响整个操作过程,Stp.Gain则着重调整回中时刹车力度以上三项调好后基本就接近V8手感了,喜欢MB手感的就适当增加I.Gain和D.GainCNT.Gain控制感度:使操作幅度与运动幅度尽量接近直线性;注意有四个方向可以设置;EXP?具体效果不明Sen.Mode传感器模式:传感器反应速度,Moderate一般,Middle中,Quick快;一般来说Moderate就很好了,小飞机用中或者快可能更好,但是抗震能力会下降HeadResp舵机反应:类似单轴陀螺的delay功能,由于模拟舵机数据处理较慢,太快的控制信号可能导致舵机动作与实际需要不协调,数字舵机可以使用更低的延迟;1最快,5最慢;调快能够使锁定更加迅速、对微小角度变化更敏感,调慢则增加稳定性、抗震性,而且降低舵机负担,并能使用更高的感度;航线推荐1,3D推荐2或3 RESET重置:恢复副翼的出厂设置值ELE.Gyro Expert升降高级菜单:与副翼高级菜单相同SWASHset Expert斜盘高级菜单:PIT-AIL总距-副翼混控:PIT-ELE总距-升降混控:PIT-ELE2总距-升降2混控:H4斜盘模式时才有用AIL-PIT副翼-总距混控:AIL-ELE副翼-升降混控:AIL-ELE2副翼-升降2混控:H4斜盘模式时才有用ELE-PIT升降-总距混控:ELE-AIL升降-副翼混控:ELE-ELE2升降-升降2混控:H4斜盘模式时才有用以上跟十字盘各位置调平和各方向减小干涉相关,我还不会用,全部默认SWcp.AIL副翼连杆补偿:CpA.Dir副翼连杆补偿方向:SWcp.ELE升降连杆补偿:CpE.Dir升降连杆补偿方向:以上跟舵机圆周非均匀线性运动相关,不会用,全部默认SpeedCmp舵机速度补偿:***打舵会导致舵机运动不一致,此项补偿舵机速度一致性SWASHRot斜盘偏转:有时硬件相位不一定能精确90度偏转,此项可以软件对相位进行偏转调整,特别是飞多旋翼时会用得到FPIT-AIL总距-副翼提前补偿:FPIT-ELE总距-升降提前补偿:FELE-AIL升降-副翼提前补偿:FAIL-ELE副翼-升降提前补偿:以上跟提前补偿相关,不会用,全部默认RESET重置:恢复斜盘的出厂设置值Governor Expert定速高级菜单:Wrk.Mode工作模式:Governor定速;Rev.Lmt转速限制,当实际转速大于设定值,则限制为设定转速Rv.Disp转速显示:Rotor旋翼头转速,Engine发动机/马达转速Response反应速度:定速传感器反应速度,Moderate一般,Middle 中,Quick快,Silent安静;一般来说汽油机Moderate,甲醇机Middle,电机Quick,无刷电机探头SilentGv.Gain定速感度:原理类似锁尾感度,感度太小油门补偿会跟不上掉转,感度太大会导致过度补偿,悬停时上下跳动THR.Mode油门模式:Optimize优化模式,接近不用定速的线性手感,但比不定速稳定性好些;Fixed定速模式;Tx.Curve使用遥控油门曲线直接控制,定速器不参与补偿,如果之前的Wrk.Mode选择限制模式,此处就必须使用Tx.CurveRv.UpDly转速升高延迟:急推油门容易扫齿,也影响锁尾效果,此项加延迟让油门上升更缓和Rv.DnDly转速降低延迟:急降油门影响锁尾效果,此项加延迟让油门下降更缓和StartDly定速启动延迟:定速油门与当前油门可能相差较大,此项加延迟在启用定速时让油门变化更缓和LLmt_Hov低油门限制:此项限制最低油门,防止飞机空中熄火LLmtIdup怠速低油门限制:此项限制3D模式最低油门,防止飞机空中熄火BFS.Volt低压保护电压:设置接收电低压保护的电压值,此项影响到定速Basic里面的低压降速功能On.Revo根据转速启用定速:当实际转速达到定速值x设定比例,则开启定速Low.Revo低转速限制:当实际转速低于设定值时,自动加油使飞机保持最低转速RESET重置:恢复定速器的出厂设置值。
GM8802F说明书
GM8802F使用说明书G M8802F-V E R051000目录1.概述----------------------------------------------------------------------11.1功能及特点----------------------------------------------------------------11.2前面板说明----------------------------------------------------------------11.3 后面板说明------------------------------------------------------21.4 技术规格---------------------------------------------------------21.4.1一般规格-------------------------------------21.4.2模拟部分-------------------------------------31.4.3数字部分-------------------------------------32.安装-------------------------------------------------------------------------------- 42.1 一般原则---------------------------------------------------42.2 传感器的连接--------------------------------------42.3电源连接-------------------------------------------52.4串行口的连接------------------------------------53.数据输入操作------------------------------------------74.标定------------------------------------------------------84.1标定方法-------------------------------------------84.1.1进入功能设置------------------------------------84.1.2小数点位置设置----------------------------------84.1.3最小分度设置------------------------------------84.1.4最大量程设置------------------------------------94.1.5毫伏数显示--------------------------------------94.1.6零位标定1---------------------------------------94.1.7 零点标定2-------------------------------------------------104.1.8 增益标定1--------------------------------------------104.1.9 增益标定2--------------------------------------------114.1.10 增益标定3-------------------------------------------114.2 标定参数表---------------------------------------115.工作参数设置--------------------------------------------125.1 工作参数的设置方法----------------------------------125.2 工作参数说明----------------------------------------126.操作--------------------------------------------------------146.1清零操作------------------------------------------147.串行口---------------------------------------------------157.1 串行口模式-----------------------------------------------157.2数据格式-------------------------------------------157.2.1 RS通讯格式下的连续方式--------------------------157.2.2 RS通讯格式下的命令方式--------------------------167.2.3 READ通讯格式下的连续方式----------------------267.2.4 READ通讯格式下的命令方式----------------------267.2.5 MODBUS通讯方式-----------------------------------278.常见问题---------------------------------------------------------299.仪表尺寸-----------------------------------------------309.1仪表外形尺寸------------------------------------309.2开孔尺寸-----------------------------------------301.概述GM8802F重量显示器是针对工业现场,需要进行重量显示与控制的场合而开发生产的一种小型仪表。
《APM调试步骤》整理版
《APM调试步骤》整理版最近一直在研究APM,现在对APM不能说完全懂但也是略知7 8了,(所以说没有什么是学不会的,只要你肯学)因为我也要入多轴坑啦,欢迎我吧,之前一直玩固定翼、飞翼FPV,但是这种飞机场地要求性比较高,没有多轴好随时随地起飞,而且天气越来越冷了风也大了飞的话肯定没有多轴稳定在此把我自己在网上搜索的一些APM知识整理了以下在此跟大家分享,一些常见的重要的问题已经在内容中加粗希望对大家有所帮助当一个全新的固件下载进APM板以后,你首先需要做的是三件事:一是遥控输入校准,二是加速度校准,三是罗盘校准,如果这三件事不做,后续的解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示:PreArm: RC not calibrated(解锁准备:遥控器没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image004.jpgPreArm: INS not calibrated(加速度没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image006.jpgPreArm: Compass not calibrated(罗盘没有校准)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/Temp/mso html1/02/clip_image008.jpg遥控校准遥控校准需要连接你的接收机,具体连接请查看APM连接安装图,连接好后连接APM的USB数据线(也可以通过数传进行连接),然后打开遥控器发射端电源,运行MP,按下图步骤选择好波特率与端口后点击connect连接APM,接着点击Install setup(初始设置)——MandatoryHardware——Radio Calibrated(遥控校准)——点击窗口右边的校准遥控按钮file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/T emp/msohtm l1/02/clip_image010.jpg点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开and接收机已经通电连接,确认你的电机没有通电(这点非常重要,做这步工作的时候建议你的APM只连接USB和接收机两个设备)file:///C:/DOCUME~1/ADMINI~1/LOCALS~1/T emp/msohtm l1/02/clip_image012.jpgfile:///C:/DOCUME~1/ADMINI~1/LOCA LS~1/Temp/msohtml1/02/clip_image014.jpg然后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置最后点击CLICK WHEN DONE 保存当每个通道的红色指示条移动到上下限位置的时候,点击Click when Done保存校准时候,弹出两个OK窗口后完成遥控器的校准。
GY550陀螺仪设置说明

参数设置模式的进入:遥控器模式开关(FUTABA-CH5)切换到非锁尾模式(指示灯变绿色),然后方向舵满舵5秒钟便可进入设置模式(此时指示灯变成红色,同时尾舵回到中位)。
参数设置模式退出:在参数设置模式时,只要切换到锁尾模式就可以退出参数设置模式,同时自动保存最后一次设置的参数,指示灯闪烁1秒钟。
1、舵机类型设置:陀螺仪进入参数状态后的第一个参数项就是“舵机类型”。
需要改变该参数项的内容,请在指示灯变成红色时,立即让方向舵回中。
通过观察指示灯的闪烁次数来了解当前参数项的值。
闪烁1次表示“舵机类型”为:模拟舵机1520uS/70Hz;闪烁2次表示“舵机类型”为:数字舵机1520uS/280Hz;闪烁3次表示舵机类型为:数字舵机760uS/560Hz;如果你需要改变“舵机类型”,只需打“半舵约0.3秒”一次,陀螺仪的“舵机类型”参数将会自动增加或减少一档,同时指示灯闪烁次数也随之增加或减少一次。
2:补偿方向设置:进入下一级参数项“补偿方向”,可打方向舵“满舵”约2秒钟后,陀螺仪指示灯变成绿色,说明陀螺仪已经进入“补偿方向”参数项,立即让方向舵回中。
A:此时可以通过观察指示灯的闪烁次数来了解当前参数项的值。
闪烁1次表示“补偿方向”为:正向;闪烁2次表示“补偿方向”为:反向;B:如果你需要改变“补偿方向”,只需打“半舵0.3秒”一次,陀螺仪的“补偿方向”参数将会自动增加或减少“1”,同时指示灯闪烁次数也随之增加或减少一次C:如果您需要“退出设置状态”,可直接将遥控器的感度开关切换到“锁尾模式”,此时,指示灯快速闪烁1秒钟后变成红色。
说明成功退回到正常工作状态的锁尾模式。
3:转向速度设置打方向“满舵”约2秒钟后,进入“转向速度”参数项后,指示灯变成蓝色,通过观察指示灯的闪烁次数来了解当前参数项的值。
闪烁1次表示“转向速度”为:最慢;闪烁10次表示“转向速度”为:最快;如果需要改变“转向速度”,只需打“半舵0.3秒钟”一次,陀螺仪的“转向速度”参数将会自动增加或减少“1”,同时指示灯闪烁次数也随之增加或减少一次。
陀螺仪设置使用技巧

陀螺仪设置使用技巧陀螺仪是一种用于测量角速度和角度的装置,广泛应用于飞行器、汽车、手机等领域。
正确设置和使用陀螺仪可以提高其测量精度和可靠性,以下是一些陀螺仪设置使用技巧。
首先,正确安装陀螺仪非常重要。
陀螺仪通常有三个轴,分别是俯仰轴、滚转轴和偏航轴。
安装时,必须确保陀螺仪的轴与被测量对象的轴保持一致,这样才能获得准确的测量结果。
同时,陀螺仪应尽量远离干扰源,例如电磁场和振动物体,避免测量误差的产生。
其次,注意校准陀螺仪。
陀螺仪在使用前需要进行校准,以调整其零位和灵敏度。
通常可以通过软件或硬件来进行校准。
在校准时,需要让陀螺仪处于稳定的状态下,以获得准确的校准结果。
同时,还需要根据具体使用场景进行调整,例如对于飞行器来说,可以校准陀螺仪的角速度和加速度,以提高飞行稳定性。
此外,要合理选择陀螺仪的采样率和输出频率。
采样率是指每秒钟陀螺仪获取数据的次数,它决定了陀螺仪的测量精度和响应速度。
较高的采样率可以获得更准确的测量结果,但也会增加数据处理的负担。
输出频率是指陀螺仪向外部设备输出数据的频率,通常通过串口或I2C总线进行数据传输。
合理选择采样率和输出频率可以根据具体应用需求来确定,以平衡精度和性能。
最后,使用陀螺仪时要注意对数据进行滤波和处理。
陀螺仪的测量数据常常会受到噪声的干扰,因此需要使用数字滤波器或卡尔曼滤波器对数据进行处理,以提高测量精度。
此外,还可以使用陀螺仪数据与其他传感器(例如加速度计)的数据进行融合,以获取更准确和可靠的姿态信息。
总之,正确设置和使用陀螺仪是确保其测量精度和可靠性的关键。
安装陀螺仪时要注意轴向一致和避免干扰源,校准时要稳定且根据具体场景调整,选择合理的采样率和输出频率,对数据进行滤波和处理。
只有在综合考虑这些因素的情况下,我们才能充分发挥陀螺仪的优势,并有效应用于不同领域。
陀螺仪操作规程
陀螺仪操作规程
《陀螺仪操作规程》
一、使用前准备
1. 确保陀螺仪处于稳定水平状态,接入电源并等待稳定。
2. 检查陀螺仪周围环境,确保安全无障碍物。
二、启动和校准
1. 启动陀螺仪,等待其自检完成。
2. 进行校准操作,确保陀螺仪的准确性和精度。
三、操作流程
1. 根据需要选择陀螺仪的工作模式。
2. 根据实际情况设置陀螺仪的参数。
3. 启动陀螺仪,并监控其工作状态。
4. 在操作过程中,随时注意陀螺仪的指示状态,确保其正常工作。
四、关机和维护
1. 在使用完毕后,及时关闭陀螺仪并断开电源。
2. 定期对陀螺仪进行维护保养,确保其长时间稳定运行。
五、注意事项
1. 陀螺仪工作时需避免受到外部振动和冲击。
2. 避免陀螺仪受到高温、高湿或腐蚀物质的影响。
3. 严格按照操作规程操作,避免误操作导致陀螺仪损坏。
通过严格遵守《陀螺仪操作规程》,能够确保陀螺仪的正常、稳定运行,提高操作效率和数据准确性。
和平灵敏度怎么调的技巧

和平灵敏度怎么调的技巧和平灵敏度是指游戏操作中鼠标或手柄的灵敏度设置。
它决定了玩家移动鼠标或摇杆时在游戏中的视角旋转速度。
灵敏度的调整对于游戏操作的准确性和舒适度有很大影响,因此了解和平灵敏度的调整技巧很重要。
首先,灵敏度的调整应该根据个人喜好和适应能力来进行。
每个人的手部协调性和反应能力不同,所以并不存在一种通用的最佳设置。
所以,以下是一些调整和平灵敏度的技巧,帮助玩家找到自己最适合的设置:1. 逐渐调整:一开始,不要过于追求快速的灵敏度设置,而应该从较低的设置开始,然后逐渐增加。
这样可以给自己适应的时间,避免突然调高导致手感不适应。
2. 考虑游戏类型:不同类型的游戏对灵敏度的要求不同。
例如,射击游戏通常需要较高的灵敏度来快速瞄准敌人,而冒险游戏则更偏向于较低的灵敏度以保证准确度。
根据你玩的游戏类型来调整灵敏度是很重要的。
3. 综合考虑:除了自己的偏好和游戏类型,还应该考虑到鼠标或手柄硬件的特性。
有些鼠标或手柄可能具有更高的灵敏度,所以你可能需要相对较低的游戏灵敏度来平衡。
另外,如果你的鼠标有自定义的软件,你可以在那里进行一些设置来进一步调整灵敏度。
4. 实际测试:最准确的方式是通过实际测试来找到适合自己的灵敏度。
在游戏中,找一个相对较宽的区域,使用各种灵敏度设置进行移动和瞄准,观察自己的感觉和准确度。
如果感觉太慢,增加灵敏度,如果感觉太快,减小灵敏度。
依靠自己的感觉来做出调整。
5. 远离极端:避免将灵敏度设置过高或过低,因为这会导致控制不稳定或不准确。
最好是在一个相对中等的范围内进行调整,然后再根据自己的实际感受微调。
6. 适应新设置:调整完灵敏度后,给自己一些时间来适应新的设置。
有时候你会觉得不习惯,但不要立即放弃,多练习一段时间来适应。
只有经过一段时间的实践,你才能真正评估新的设置是否适合自己。
总而言之,和平灵敏度的调整需要根据个人偏好、游戏类型和硬件特性等因素进行综合考虑。
通过逐渐调整、实际测试和适应新设置等技巧,可以帮助玩家找到最适合自己的和平灵敏度设置,提升游戏操作的准确性和舒适度。
GM700双感度陀螺仪设置

GM700 是专门为直升机设计的双感度锁尾陀螺仪采用AVCS(Angular Vector Control System) 角度向量控制系统,锁尾性能更加稳定。
可自动消除风力等天候因素,以及直升机的各种姿态所引起之尾舵偏移,使操控更容易,适合3D飞行。
--------------------------------------------------------------------------------------------------------------------------控制系统:数字PI(proportional integration)比例积分控制陀螺仪传感器:压电式角速度传感器工作电压:4V~6V(DC)工作温度:-10度~+45度外形尺寸:28X28X20mm重量:18克功能:具备DS模式开关(支持数码舵机和普通舵机)正逆切换开关、延时调整旋钮、尾舵机行程调节旋钮、可由遥控器调节陀螺仪的灵敏度(双感度)以及切换普通模式和锁定模式(AVCS)-----------------------------------------------------------------------------------------------------------------------------指示灯说明:快速闪烁:表示开启电源后,陀螺仪正在初始化。
恒亮:表示陀螺仪处于锁定(AVCS)模式。
熄灭:表示电源关闭,或陀螺仪处一般模式。
慢速闪烁:表示陀螺仪没有收到遥控器送出的尾舵控制讯号,此时尾舵舵机无法操作。
间歇闪烁:1.表示一般模式下开启电源,陀螺仪无法正确执行初始化程序。
(请切换到锁定模式,关闭电源再重新开启)2.表示在锁定模式时,目前接收到的尾舵控制讯号与陀螺仪的中立点讯号不同。
闪烁二次:(二种情况会出现此灯号)1.正在拨动尾舵摇杆2.尾舵的中立点已经偏移,必须重新调整设定中立点。
陀螺仪的安装以及设定

陀螺仪的安装以及设定陀螺仪在模型直升机上扮演着相当重要的角色,尾舵的安定与否,就全看它的表现。
随着科技的进步,从机械式陀螺仪、压电式陀螺仪,一直演进到目前最流行的机头锁定(Heading Lock)压电式陀螺仪。
虽然设定的方法,因品牌及型号的不同而有所差异,但其基本的观念都是一样的。
所以只要观念正确,无论是使用哪一种陀螺仪,应该都可轻松上手。
㈠陀螺仪的种类1.由构造来区分机械式:感测器采用马达高速运转来产生陀螺效应,再利用电磁感应器来侦测偏向速度。
优点是价格低廉,缺点是反应慢、准确度低、耗电、寿命短、重量大、怕振动。
(例如Futaba 153 BB)压电式:感测器采用压电晶体。
优点是反应快、准确度高、耗电小、寿命长、重量轻,缺点是价格贵。
但近年来价格有愈来愈低廉的趋势。
温度是压电式陀螺仪的致命伤,会导致中立点偏移,所幸压电式陀螺仪内部都有温度自动修正的设计。
(例如JR NEJ-900、JR NEJ-3000、Futaba G-301、Futaba G-501) 锁定式:最新式的陀螺仪。
强调能使尾舵保持稳定不会偏向,没有"风标效应"(Weathercock Effect)。
适合3D花式特技使用,但却不适合F3C的飞行动作。
(例如JR 550T、JR 5000T、Futaba GY-501、CSM 360、CSM 540)2.由感度来区分单段式:只能设定一种感度,由控制盒上的旋纽来调整感度值。
优点是价格低廉,缺点是只有一种感度、无法同时适合静态飞行及上空飞行。
(例如JR G-400、GWS PG-01、CSM 180)二段式:能设定二种感度,您的遥控器必须具备切换感度的功能。
依调整感度值的方式不同,又可分为以下二种。
由控制盒上的旋纽来调整感度值。
H(high)旋纽控制高感度值,L(low)旋纽控制低感度值。
(例如Futaba G-501)控制盒无调整感度的旋纽,必须由遥控器来调整感度值,所以您的遥控器必须具备设定感度的功能。
CMI700简要操作说明书
CMI700操作说明书1、仪器说明CMI700系列产品是非破坏性的表面覆盖层厚度测量仪器。
本仪器是为精确测量不同基材上的各种涂镀层而设计。
CMI700可以同时配置3种测量模块:微电阻模块(MRX),贝它射线模块(BMX),涡流及磁感应模块(EMX)。
EMX模块可配置导磁,涡流化合物及镍的测量。
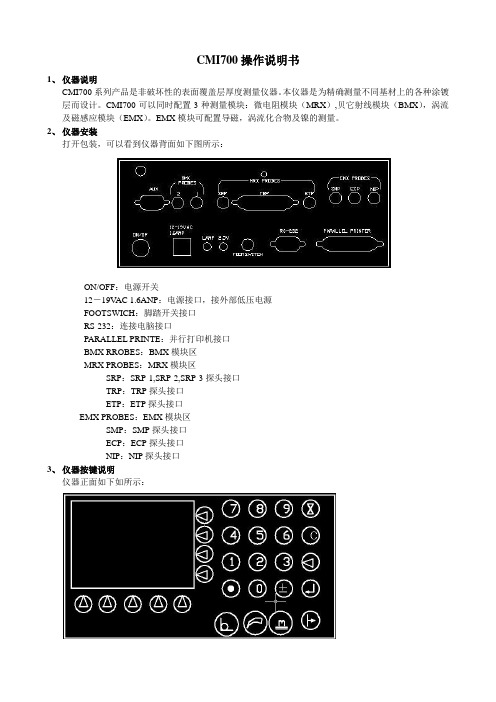
2、仪器安装打开包装,可以看到仪器背面如下图所示:ON/OFF:电源开关12-19V AC 1.6ANP:电源接口,接外部低压电源FOOTSWICH:脚踏开关接口RS-232:连接电脑接口PARALLEL PRINTE:并行打印机接口BMX RROBES:BMX模块区MRX PROBES:MRX模块区SRP:SRP-1,SRP-2,SRP-3探头接口TRP:TRP探头接口ETP:ETP探头接口EMX PROBES:EMX模块区SMP:SMP探头接口ECP:ECP探头接口NIP:NIP探头接口3、仪器按键说明仪器正面如下如所示:主要按键说明如下::软件画面选择键,显示屏在对应键的位置显示功能,按键选择该功能:在测量界面下按此键进入程序编辑菜单:进入现有程序的再校准菜单。
测量界面下进入再校准菜单:进入所选程序的测量界面。
该按键只能在程序清单界面下才可使用:在手动测量模式下按此键进行一次测量,在扫描模式下把最后一个读数读入仪器内。
在程序清单界面下按此键可进入测量模式:在操作过程中取消该操作并返回到前次操作界面:清除本次输入或在测量界面下清除最后一个读数:并清除前一个字符使光标回到上次字符位:保存当前输入或接受当前选择。
在测量清单界面下按两次进入所选程序的测量界面:时钟设定时改变时间/日期的增加、减少方向。
在扫描测量模式下改变扫描读数显示的间隔时间——:数据输入或功能设置时输入数值:输入数值时小数点的输入4、ETP探头的使用及程序建立1、程序的建立打开电源,跳过预热,进入MRX模块1.选择NEW,建立一个新的程序2.选择MRX ETP,建立一个ETP探头测量程序,按数字键选择3.输入程序编号,编号可从1-100,不能与以前编号重复,按数字键输入编号4.输入程序名称5.输入程序标识6.单位选择,直接按数值键选择7.精度选择,小数点后面小数个数8.测量次数选择,即测量多少次出来一个读数9.极限最大值设定(选OFF关闭,选ON需输入最大值)10.极限最小值设定(选OFF关闭,选ON需输入最小值)11.板厚设定,设定所要测量板的板厚12.基材铜设定,设定板材极板铜是多少盎司13.蚀刻设定,设定所要测量的孔是否蚀刻14.最多存储读数个数设定,设定该程序可存储的读数15.X&R特性曲线组的大小16.设定在下次进入该程序时是否清除上次测量说得的统计量即特性曲线17.偏移量设定,设定该值后,测量时显示的读数为测量值加上该偏移量18.传导率系数设定,设定该值后,测量时显示值为测量值乘以该值19.程序建立完成,按任意键保存并推出2、ETP探头校准建立ETP程序完成后,一般情况下需要进行校准,校准方法为:1.返回主页面,按Setup键2.进入安装界面,按Turning&CAL键3.进入校准界面,按CAL ETP键,进行ETP探头校准4.提示把探头放在空气中,按键,把探头放于空气中,按键5.选择校准时测量标准片的次数6.把探头放在标准片上,按键7.输入单位8.输入标准片孔铜的厚度,按回车确认9.校准完毕,选择Back键返回到主页面3、ETP探头测量孔铜校准完毕后,就可以进行测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GM700 是专门为直升机设计的双感度锁尾陀螺仪
采用AVCS(Angular Vector Control System) 角度向量控制系统,锁尾性能更加稳定。
可自动消除风力等天候因素,以及直升机的各种姿态所引起之尾舵偏移,使操控更容易,适合3D飞行。
--------------------------------------------------------------------------------------------------------------------------
控制系统:数字PI(proportional integration)比例积分控制
陀螺仪传感器:压电式角速度传感器
工作电压:4V~6V(DC)
工作温度:-10度~+45度
外形尺寸:28X28X20mm
重量:18克
功能:具备DS模式开关(支持数码舵机和普通舵机)
正逆切换开关、延时调整旋钮、尾舵机行程调节旋钮、
可由遥控器调节陀螺仪的灵敏度(双感度)以及切换普通模式和锁定模式(AVCS)-----------------------------------------------------------------------------------------------------------------------------
指示灯说明:
快速闪烁:表示开启电源后,陀螺仪正在初始化。
恒亮:表示陀螺仪处于锁定(AVCS)模式。
熄灭:表示电源关闭,或陀螺仪处一般模式。
慢速闪烁:表示陀螺仪没有收到遥控器送出的尾舵控制讯号,此时尾舵舵机无法操作。
间歇闪烁:
1.表示一般模式下开启电源,陀螺仪无法正确执行初始化程序。
(请切换到锁定模式,关闭电源再重新开启)
2.表示在锁定模式时,目前接收到的尾舵控制讯号与陀螺仪的中立点讯号不同。
闪烁二次:(二种情况会出现此灯号)
1.正在拨动尾舵摇杆
2.尾舵的中立点已经偏移,必须重新调整设定中立点。
----------------------------------------------------------------------------------------------------------------------------
开关功能说明:
★DS模式开关(数字舵机模式开关)
使用数字舵机时,请将DS模式开关切到ON的位置;
使用模拟舵机时,请切到OFF的位置,否则将会导致舵机烧毁。
★DIR反转开关(切换陀螺仪的控制方向)
请再三确ren陀螺仪的动作方向是否正确:
将机头朝左转动,此时尾变距滑套应该往内走(与遥控器打右舵的方向相同)如果方向不正确,请切换陀螺仪上的正逆开关,否则直升机在起飞时将产生高速自旋的危险。
★DELAY延迟控制旋钮(调整尾舵控制讯号的运作速度)
使用高速数码舵机时,请将旋钮逆时针调整至0的位置。
使用速度较慢的普通舵机时,请根据实际需要调整延时量。
发现直升机产生追踪现象时,顺时针转动旋钮,增加延迟时间,可消除追踪现象。
★LIMIT舵机最大行程量(设定尾舵机的最大行程量)
调整LIMIT旋纽,使尾舵摇杆向左及向右打满舵时,
尾舵机的行程量不会超出尾变距滑套的最大活动范围。
顺时针旋动旋钮为增加行程量。
请勿将行程量调整得太小,以免降低舵机的性能. ★尾舵频道接头
至接收机的尾舵通道(CH4)
★感度频道接头
至接收机的感度通道(CH5),可同时做为切换陀螺仪的灵敏度及模式(锁定模式或一般模式)
因接头是单根的讯号线,请勿用力拉扯以免断线。
★尾舵机接头,接至尾舵机。
-----------------------------------------------------------------------------------------------------------------------------
将陀螺仪安装到直升机上:
安装时请使用套件盒内附之双面胶,底部平面必须与主轴成90°垂直,
否则会影响左右侧滚及前后滚翻的方向,距离马达4cm以上,以免产生干扰。
选择舵机:
陀螺仪的锁尾性能与所选尾舵机的性能有密切关系,建议使用高速数码舵机,如Futaba9257、9650等,并将DS模式开关切至ON的位置。
----------------------------------------------------------------------------------------------------------------------------
个人感觉GM700性能偏低,锁尾模式不太稳定,多少有点漂
航线飞行建议用比率模式,感度建议70~90%,调试得当的话,也不需要设上下跟轴,
无论是悬停或航线飞行,尾舵基本不会偏移。
动作会很自然,很漂亮......
但是有侧风时会出现“风标效应”,随时需要手动修正。