大吨位起重机履带梁焊接变形控制
起重机械结构焊接变形的因素及控制分析

起重机械结构焊接变形的因素及控制分析身份证号码:21122419870217****摘要:起重机是现代制造业实现生产机械化和自动化、提高生产率的重要设备。
广泛应用于装配、维修、加工和储物场。
本文对起重机械结构焊接变形的影响因素及控制进行了分析,以供参考。
关键词:起重机械;焊接变形;控制分析引言近年来,中国现代经济发展迅速,现代化生产不断加快,规模不断扩大,为起重机的广泛应用提供了平台。
然而,起重机事故仍然频繁发生。
为什么?通过对其运行情况的分析,发现起重机安全事故频发的主要原因是人为失误或起重机结构质量问题,尤其是主梁。
如果起重机主梁的质量不能得到控制,将严重威胁整个起重机运行的安全。
因此,有必要加强对起重机主梁焊接质量控制方法的分析。
1焊接要求对主梁焊接工艺和质量控制的研究分析表明,焊接时,(1)如果焊接距离过长,焊接应符合制动要求。
(2)焊接吊车梁的横隔板和腹板时,必须对齐并对称焊接。
(3)焊接时注意主梁根部的坡口。
如果主梁根部坡口不符合焊接质量要求,需要对主梁根部坡口进行调整和修复,使焊接满足焊接要求,从而有效降低根部焊接缺陷的可能性。
(4)焊接过程中采用埋弧焊或手工电弧焊时,应清除焊层之间的各种残留物和灰尘。
(5)焊接过程中,尽量少用线能量,保证焊接安全。
同时,如果很多人和机器需要协同工作,就要尽可能分散、对称地工作。
这样可以有效防止机器过于集中而散发热量。
2起重机械焊接常见缺陷分析焊接形状缺陷和一般焊接形状缺陷包括咬痕、焊接类型、弧坑等。
不符合形状、尺寸和形状的标准要求。
这看起来不是很严重的问题,但是对焊接质量影响很大。
首先,由于焊接参数或操作的错误选择,经常会出现母材凹槽或凹痕减小焊接横截面并导致应力集中的问题。
其次,焊接是一种由于熔融金属的流动而没有焊接意义的金属,会对焊接形状产生负面影响,导致应力集中。
第三,弧坑是由于焊接工艺不成熟、焊接填充材料不足、焊接完成不良和电弧断裂造成的焊缝末端凹陷。
大吨位起重机履带梁焊接变形的控制
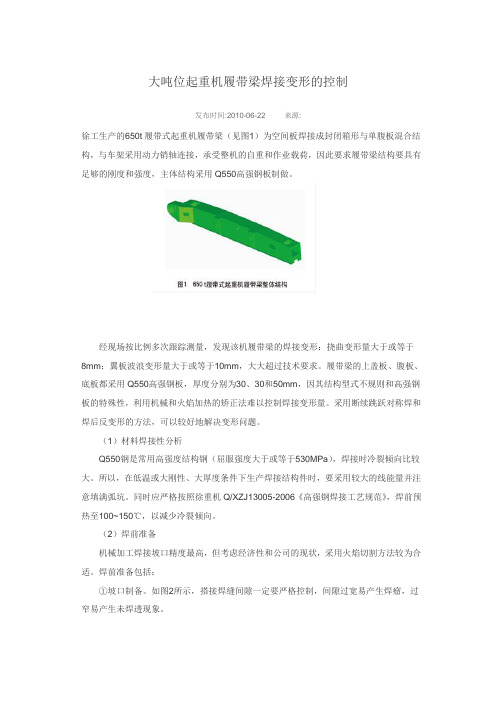
大吨位起重机履带梁焊接变形的控制发布时间:2010-06-22 来源:徐工生产的650t履带式起重机履带梁(见图1)为空间板焊接成封闭箱形与单腹板混合结构,与车架采用动力销轴连接,承受整机的自重和作业载荷,因此要求履带梁结构要具有足够的刚度和强度,主体结构采用Q550高强钢板制做。
经现场按比例多次跟踪测量,发现该机履带梁的焊接变形:挠曲变形量大于或等于8mm;翼板波浪变形量大于或等于10mm,大大超过技术要求。
履带梁的上盖板、腹板、底板都采用Q550高强钢板,厚度分别为30、30和50mm,因其结构型式不规则和高强钢板的特殊性,利用机械和火焰加热的矫正法难以控制焊接变形量。
采用断续跳跃对称焊和焊后反变形的方法,可以较好地解决变形问题。
(1)材料焊接性分析Q550钢是常用高强度结构钢(屈服强度大于或等于530MPa),焊接时冷裂倾向比较大。
所以,在低温或大刚性、大厚度条件下生产焊接结构件时,要采用较大的线能量并注意填满弧坑。
同时应严格按照徐重机Q/XZJ13005-2006《高强钢焊接工艺规范》,焊前预热至100~150℃,以减少冷裂倾向。
(2)焊前准备机械加工焊接坡口精度最高,但考虑经济性和公司的现状,采用火焰切割方法较为合适。
焊前准备包括:①坡口制备。
如图2所示,搭接焊缝间隙一定要严格控制,间隙过宽易产生焊瘤,过窄易产生未焊透现象。
②焊前清理。
采用机械方法将坡口附近10mm范围内的铁锈和油污打磨清理干净,露出金属光泽。
焊丝表面也一定要清洁,不得有铁锈和油污。
③焊接应在焊接平台上进行,并用工装夹具进行刚性固定。
(3)焊接工艺参数履带梁的实际焊接工艺参数如附表所示,实际焊接过程中焊接速度须控制在30~50cm/min。
(4)控制焊接变形的措施①履带梁的拼焊及定位焊前工件的装配及定位对焊后的结构变形有很大影响,组装履带梁时,要严格按照工艺要求拼置。
定位焊缝应该对称点固,长度一般应控制在5~10mm,以保证有一定的强度。
工程机械大型结构件焊接变形的原因及控制方法探讨_1

工程机械大型结构件焊接变形的原因及控制方法探讨发布时间:2022-09-08T05:44:29.709Z 来源:《工程建设标准化》2022年第37卷第9期作者:邓理才[导读] 在焊接过程中,由于温度场不均匀而引起的焊接工件形状和尺寸的变化称为焊接变形。
邓理才45011119900413****摘要:在焊接过程中,由于温度场不均匀而引起的焊接工件形状和尺寸的变化称为焊接变形。
随温度的变化称为焊接瞬时变形;焊件完全冷却到初始温度时的变化称为焊接残余变形。
本文中提到的工字钢和箱形梁,由于其优越的力学截面结构,在工程仪器中得到了广泛的应用,但这种焊接结构也是最容易产生焊接变形的。
本文以此类框架结构焊接为例,分析了焊接变形的原因、改善和控制方法。
关键词:工程机械;大型结构件;焊接变形;控制引言熔接过程中的不规则加热和冷却可能会导致熔接变形和剩馀应力,而过度变形可能会影响料件大小的精确度,甚至会导致组合错误,并大幅降低结构的负载能力。
因此,需要采取有效措施控制焊缝变形。
实际工程中用于减少焊缝变形的方法包括两大类:变形后修正方法和根据某些控制措施减少焊缝后变形的方法。
1.工程机械结构件焊接变形种类1.1收缩变形对于结构件的焊接施工来说,收缩变形是焊接变形的基础单元,结构件焊接施工后在焊缝的冷却过程本质上是液态向固态进行转化的一个过程,在此过程中会产生较大的焊接应力,焊缝本身也会出现体积缩小,导致焊接件外形尺寸会出现变小的现象。
简单结构件在进行焊接施工的过中经常会产生收缩变形,且大部分简单结构件的焊缝相对较少,焊缝方向基本保持一致,在焊缝冷却的过程中收缩方向也基本一致,在这种情况下,出现收缩变形会导致焊接件的外形尺寸产生较大变化。
1.2焊接工艺不合理结构件制作过程中一个重点和难点问题就是指定合理的焊接施工工艺,焊接工艺合理性不仅会对产品质量产生影响,而且也会对焊接施工效率造成影响。
结构件产生的很多焊接变形在很大程度上都与焊接工艺存在直接关联,例如,焊接工艺指定过程中的焊接设备选择、焊接参数指定、焊接顺序设计、选择焊接工装夹具等都是导致焊接变形的直接因素,因此,在针对大型结构件指定焊接工艺的过程中要对焊接施工工艺的选择进行充分考虑,对于焊接工艺设计人员来说,要想指定出合理的焊接施工工艺,不仅要具备丰富的理论知识,同时,还要具备丰富的焊接施工经验。
吊车梁焊接_H型钢焊接变形的控制与矫正

焊条抗能力强 , 焊 前 对 具有较高的抗锈能力 , 焊前对焊件 技术交流《 宁夏机械》 2007 年第 2 期吊车梁焊接、H型钢焊接变形的控制与矫正王银德( 额济纳旗银德锅炉安装服务中心 , 内蒙古 额济纳旗 735400)摘要用二氧化碳气体保护焊、手工焊焊接龙门吊车梁类的大型钢结构件,配以合理的焊接工艺和 焊接顺序 , 减少焊接变形 ; 焊接 H 型钢的矫正、反变形施焊。
1 关键词前 言吊车梁 H 型钢焊接控制 矫正影响焊接变形的主要因素与焊缝在结构构件中自制吊车梁 , 吊车梁结构形式如图 1 所示 , 截面尺 寸单根长度为 18000mm。
对于吊车梁的制 造质 量 要 求 , 焊缝为一级焊缝 , 构件长度制造允许偏差为±10mm, 高 度的 允许 偏 差为±4mm, 宽度 的允 许 偏差为±3mm 弯曲矢高的允许 偏差 为 1/1000, 且不 大于10mm, 扭曲偏差不大于 5mm, 翼缘板垂直度的允许偏差为 3mm, 腹板局部平面度的允许偏差为 2mm。
的位置、焊接结构的刚性的大小、装配顺序、焊接顺序、 焊接规范的选择与应用等有关。
一旦焊接变形超过标准要求 , 矫正将会非常困难 , 以至于不得不用气割割开重焊或不得已而使整根吊 车梁报废。
因此 , 必须采取合理的组装焊接顺序和行 之有效的工艺措施 , 控制吊车梁的焊接变形 , 确保吊 车梁的制造质量 , 达到设计要求和技术规范的要求。
H 型钢因具有优越的结构型式和良好的力学性能2.2 焊接方法选择而成为钢结构的主要结构模式。
下面以焊接吊车钢梁 为例 , 探讨焊接吊车梁和 H 型钢焊接变形的控制与矫 正方法。
( 1) 常用的焊接方法有手工电弧焊、埋弧焊和二 氧化碳气体保护焊 3 种 , 其特点见表 1。
( 2) 综上所述 , 二氧化碳气体保护焊与其它电焊2 焊接吊车主梁表 1 常用的焊接方法比较腹板翼缘板筋板手工电弧焊二氧化碳气体保护焊取决于焊丝牌号和 CO2 气体。
钢结构制造中焊接变形的控制方法

钢结构制造中焊接变形的控制方法焊接变形是焊件在焊接过程中不均匀加热引起的,是钢结构制造中所遇到的一个普遍问题。
如何控制好焊接变形是钢结构产品制造成功与否的关键之一,也是难点之一。
有的工厂因为控制不好焊接变形而报废整个产品,如行车梁、吊车梁、钢平台等,不仅造成人力、物力的浪费,而且延误工期,影响厂家声誉。
本文结合武船重工公司承建的钢结构产品,针对不同的结构形式,介绍了控制焊接变形的工艺方案。
船舶甲板及上层建筑焊接变形的控制如果船舶甲板及上层建筑焊接变形过大,则将直接影响船舶外观质量,因此众多船舶制造厂均下了很大工夫来克服焊接变形,提升产品的外观质量,但是由于船舶甲板特别是上层建筑往往板厚较薄,结构较多,局部位置焊接热输入量较大,焊接应力使薄板容易产生失稳,因此很容易出现波浪变形。
根据安庆70m趸船、400T浮吊船、双10T 浮吊船、30车/498客海上渡船的成功制造经验,可以采用的工艺方案为:所有纵缝端口要求预先装焊角钢(点固焊)以加强钢板的局部刚性,同时要求采用小线能量的CO2气体保护焊进行焊接,焊接时要求焊工分散、分段退焊,缝口装配质量应在规定范围内,不允许出现大间隙的缝口。
所有的围壁板扶强材只能点固焊,当围壁板与甲板、围壁板与围壁板间的角焊缝焊完后,再采用下行焊条(J426X)焊接扶强材与围壁板间的角焊缝,所有角焊缝都要求严格执行设计要求,不允许随意增大焊角尺寸及间断焊间距和焊缝长度。
这样一般可以较好的控制焊接变形,局部有变形的可以稍稍进行火焰矫正即可达到设计要求和《钢质内河船舶入级与建造规范》或《钢质海船入级与建造规范》的要求。
钢结构T形接头焊接变形的控制T形接头最容易产生角变形,如何控制角变形是保证T形接头制造精度的关键之一,由表可以得到一些反变形的参考数据。
根据此数据,在武汉体育场和芜湖体育场耳板焊接中(如图1)大量采用反变形来控制耳板角变形,取得了良好的效果。
钢箱梁横隔板单元件制造焊接变形的控制许多钢箱梁横隔板的加强肋只布置在一侧,横隔板一般比较薄,部分还有人孔加强圈,大量的焊缝在一侧进行焊接,容易引起横隔板的波浪变形和翘曲变形。
浅谈焊接结构件焊接变形的控制

浅谈焊接结构件焊接变形的控制焊接是制造业中常用的一种连接工艺,但焊接过程中往往会产生焊接变形,导致焊接结构件的尺寸、外形和性能出现变化,严重影响产品的质量和使用寿命。
因此,焊接变形的控制是焊接过程中的一个重要问题。
一、焊接变形类型焊接变形的类型主要有弯曲变形、扭曲变形、角度变形和长度变形。
其中,扭曲变形是最常见的一种,通常由于焊接热量和残余应力引起,其次便是角度和长度变形,最后才是弯曲变形。
焊接变形是受多种因素影响的,例如焊接过程的热影响、焊接件的尺寸和材料等。
二、控制焊接变形的方法为保证焊件的质量,必须采取措施控制焊接变形,削减其对焊件的影响。
下面简单介绍几种常用的控制焊接变形的方法:1.使用焊接夹具焊接夹具是一种用于固定工件的装置,可将工件紧固在焊接位置上,从而减少焊接变形。
它的作用与钳工夹具类似,但它的特殊之处在于有稳定和准确的定位,可控制和调整焊接变形。
但是这种方法通常适用于小型结构件,而且夹具的制作需要一定的时间和成本。
2.使用适当的焊接序列选择适当的焊接序列是控制焊接变形的另一种常用方法。
焊接序列应该从中心位置开始,将工件的各部分焊接均匀。
从中心开始,有助于平衡焊接热量的分布,减少焊接变形产生的可能性。
当工件较大且有复杂形状时,必须选择合适的焊接顺序以确保焊接质量和减少变形。
3.控制焊接热量焊接热量的控制是控制焊接变形的一个重要因素。
热量过高或焊接时间过长,会导致焊接变形和裂纹等缺陷。
因此,在进行焊接前,必须加以考虑和控制,以避免过度加热导致变形。
4.使用预应力预应力技术是通过在结构构件中设置特定方式的应力,以抵消焊接应力并减少变形。
这种方法需要对焊接过程、组成结构和应力分布等因素进行详细的分析和计算,需要较高的技术和设备支持。
因此,它通常用于大型重载结构件的制造过程中,如谷仓、桥梁和大型船舶,以减少结构件的形变和应力。
总之,控制焊接变形是保证焊接质量和制造工艺的重要方面。
采取合适的措施可以减少焊接变形产生,确保结构件的尺寸和形状稳定和精确。
工程机械大型结构件焊接变形的原因及控制方法探讨

工程机械大型结构件焊接变形的原因及控制方法探讨摘要:在当今工程机械领域,焊接施工技术广泛应用于复杂结构的加工。
大型结构的机械加工产量约占世界钢铁产量的45%。
在世界工业发展的过程中,焊接结构起着非常重要的作用。
与其他加工方法相比,将焊接方法应用于大型结构件的加工,不仅能有效地控制材料的消耗,而且在复杂、困难的结构件上显示出较强的技术优势。
目前,结构件的焊接技术虽然取得了很大的进步,但在实际焊接过程中,由于焊接残余应力等原因,结构件经常发生变形,严重影响结构件的加工制造质量。
因此,对大型工程机械结构的焊接工艺和变形因素进行系统分析具有重要的现实意义。
关键词:工程机械;大型结构件;焊接变形;原因;控制方法1工程机械结构件焊接变形种类1.1收缩变形在结构焊接施工中,收缩变形是焊接变形的基本单位。
结构焊接施工后,焊缝的冷却过程基本上是一个由液态转变为固态的过程。
在这一过程中,会产生较大的焊接应力,减少焊缝本身的体积,从而减小焊缝的外形尺寸。
焊接施工过程中,简单结构件经常发生收缩变形,大多数简单结构件焊缝相对较少,焊缝方向基本相同,焊缝冷却时收缩方向基本相同。
在这种情况下,会发生收缩和变形,导致焊缝外形尺寸发生较大变化。
1.2弯曲变形曲屈是很多焊缝热应力和收拢变形最后的结果,多发于焊缝部位样子细微、截面左右规格相距比较大、焊缝遍布不一样、焊缝部位次序不科学的情形下。
比如挖掘机车架箱形梁和平台车架箱形梁(箱形梁是铝型材和板才焊接而成方形截面长细构造)的焊接,关键产生弯曲。
1.3扭曲变形在大型工程机械结构的焊接施工中,扭转变形是最常见的焊接变形形式,对结构的影响最大。
大型结构一般为框架结构,在焊接施工中一旦出现板料尺寸不均、焊缝排列不对称或不规则等问题,很容易造成焊缝内应力方向不一致。
内部应力不平衡问题。
在这一阶段,很难根据试验准确预测焊缝变形的位置和方向,从而导致扭转变形。
2大型结构件产生焊接变形的原因分析结构一旦发生焊接变形,不仅会影响产品的外观,还会影响产品的性能。
吊车梁焊接变形及防止措施

w rs c n gdrwln ot hp ; atnr a r od: e e;e i u o saep cuoa m se r i a r d g f r i y eus e
1 工艺分析 : 吊车梁的主要受力元件为桥架主梁 , 主梁的严格 技术要求是保证桥架技术条件得到满足的前提。主
度, 以大加筋板位置作为测量点, 如下挠度较小, 则先 焊下盖板的两条角焊缝。如上挠过大 , 则先焊上盖板 的两条角焊缝, 同时利用梁的自 重作挠度的调节, 如
图 3 示。 所
2 3
3 1
2 3
正常 图3
偏大
图2
随后装配腹板, 因为腹板有预制上挠, 装配时需 使盖板与之贴合严密后点焊, 形成没有下盖板的 I I 形梁, 侧放躺下, 焊接腹板与筋板之间的焊缝, 先集中 焊接一侧, 以造成向另一侧的有利旁弯。 装配上盖板, 在装配时注意与腹板之间的紧密贴 合, 由于加筋板规定了矩形形状公差, 较容易控制盖 板的倾斜度和腹板的垂直度, 然后点焊。控制上挠度 要考虑到卸载后的回弹变形。由于腹板预制了较大 的上挠, 点焊下盖板的压紧力使主梁上挠度减小, 从 而在腹板中造成拉应力 , 有利于防止波浪变形。
GB T 6 5一2 0 / 5 9. 0 01
Ceil ys a ea mgea l i rr t hmc aa s o mg s a an i一a mn eao a nli f n i n d s u a cr f y mtis-一F m a mc o tn coei mt d arl ea l e i aspo s tmtc h f a t o b ri p r r e o o e r
( 上接第 1 页) 9
序 号
起重机主梁焊接质量控制方式分析
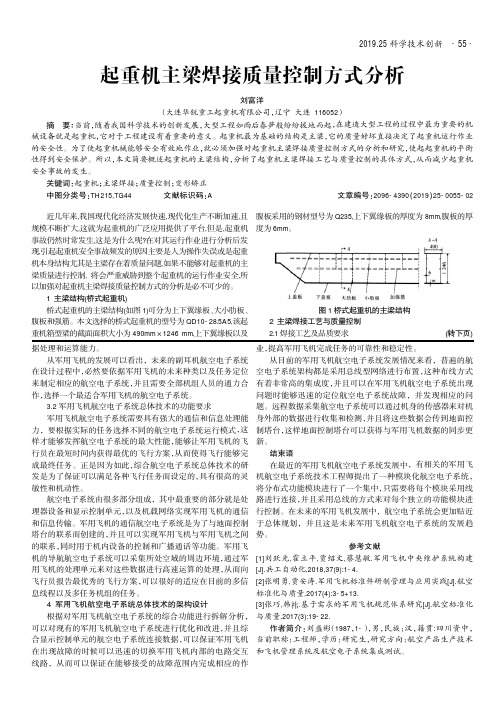
2019.25科学技术创新据处理和运算能力。
从军用飞机的发展可以看出,未来的副耳机航空电子系统在设计过程中,必然要依据军用飞机的未来种类以及任务定位来制定相应的航空电子系统,并且需要全部机组人员的通力合作,选择一个最适合军用飞机的航空电子系统。
3.2军用飞机航空电子系统总体技术的功能要求军用飞机航空电子系统需要具有强大的通信和信息处理能力,要根据实际的任务选择不同的航空电子系统运行模式,这样才能够发挥航空电子系统的最大性能,能够让军用飞机的飞行员在最短时间内获得最优的飞行方案,从而使得飞行能够完成最终任务。
正是因为如此,综合航空电子系统总体技术的研发是为了保证可以满足各种飞行任务而设定的,具有很高的灵敏性和机动性。
航空电子系统由很多部分组成,其中最重要的部分就是处理器设备和显示控制单元,以及机载网络实现军用飞机的通信和信息传输。
军用飞机的通信航空电子系统是为了与地面控制塔台的联系而创建的,并且可以实现军用飞机与军用飞机之间的联系,同时用于机内设备的控制和广播通话等功能。
军用飞机的导航航空电子系统可以采集所处空域的周边环境,通过军用飞机的处理单元来对这些数据进行高速运算的处理,从而向飞行员报告最优秀的飞行方案,可以很好的适应在目前的多信息线程以及多任务机组的任务。
4军用飞机航空电子系统总体技术的架构设计根据对军用飞机航空电子系统的综合功能进行拆解分析,可以对现有的军用飞机航空电子系统进行优化和改进,并且综合显示控制单元的航空电子系统连接数据,可以保证军用飞机在出现故障的时候可以迅速的切换军用飞机内部的电路交互线路,从而可以保证在能够接受的故障范围内完成相应的作业,提高军用飞机完成任务的可靠性和稳定性。
从目前的军用飞机航空电子系统发展情况来看,普遍的航空电子系统架构都是采用总线型网络进行布置,这种布线方式有着非常高的集成度,并且可以在军用飞机航空电子系统出现问题时能够迅速的定位航空电子系统故障,并发现相应的问题。
大吨位汽车起重机臂体焊接变形及控制

接应 力有纵 向和 横 向两种 。根据 实践经 验 , 产生变形的因素有 以下几种 。
2 . 1 焊前材料 内应力 组成 臂筒 的高强 钢钢 板钢板 内部存 在有 米释 放的 内 力 ,祥切 剖下料 过程 中钢板 内 部又 会产生 切割 残余 内应 力,如果 不进行 内 应力 消除直 接折 弯 ,弯板 l ^ ] 将 会产 生更为复
通 过抛 丸和 轧制校 平可 以消 除材 料本 身 的氧化 皮 、铁 锈和 轧制 内应力 。冈此 原材 料
杂的内应力 ,导致变形。
部件 的位 、焊接顺 序直 接影 响起重 臂的成
美观 。因此 。 因此 , 研究分析并控制焊接变形 、
焊后矫形迫存眉 睫。
图 1 臂 筒截 面 图 1 臂体焊后 变形类型
我司 的 5 0 T起 重 机 臂体 结 构截 面如 图 1 所示 ,焊后 出现主 要变 形有 波浪 变形 和扭 曲 变形 同时还 带有 小 的角变 形和弯 曲变 形。这 些 变形 会 导致焊 缝周 围 凸凹不平 、臂体 整体 _ 卜 下或 左右 弯 曲以及 臂体 两端相 对于 中轴线 扭斜。 现 以上种 种变 形均 会导致 起重 臂 的 安 装 、伸缩 困难 ,以及载重 时的稳定性 。
为 了减轻 臂体重 跫 ,上 下弯 板采 用的不
同厚 度钢板 .这样就 会造 成焊缝 距离 简体截 面形 心有 一定距 离 ,这样 会残 生弯 曲和扭 曲
变形。
生焊 接麻 力导致 不 同发生 变形 。常见 的焊
2 . 3 臂筒 内空 在机 械手 焊接过 程 中, 由于 臂筒 内空无
焊 接 变形 进 行 控 制 的 几种 方 法 。
关键 词 : 汽 车 起 重 机 ;焊 接 变 形 ;控 制 ;矫 形
吊车梁焊接变形矫正【精品】

我不应把我的作品全归功于自己的智慧,还应归功于我以外向我提供素材的成千成万的事情和人物!——采于网,整于己,用于民2021年5月12日吊车梁焊接变形矫正摘要:本文通过对吊车梁焊接变形的矫正,介绍火焰矫正的几个关键特点。
【关键词】吊车梁制作质量控制焊接变形火焰矫正1 .工程概述江苏徐矿综合利用发电有限公司一期2×330MW(CFB)机组工程的汽机房吊车梁为华东电力设计院设计,形式为焊接H型钢,截面高度H=1600mm。
其上下翼缘板厚δ=25mm,腹板厚δ=18mm,上翼缘板宽度B=600mm,下翼缘板宽度B=400mm,上翼缘两侧加δ=25mm挂板。
本项目中所有使用的钢板材质均为Q235B。
合计32根钢梁,共165T,所有行车梁均在徐矿BOP铆工场现场制作加工!2.施工要求高质量为在预算内按时完成提交满足要求的产品!吊车梁制作安装完是汽机房屋架安装及封顶的前提条件,同时也是下一步汽机房设备安装的前提条件,需按时完成行车梁制作,而整个吊车梁制作工期只有1个月,考虑到运输等方面原因无法放置到钢结构加工厂施工,只能在施工现场加工。
因行车梁为承重行车梁制作要求比较高。
采用埋弧自动焊施工,腹板与上翼板的T型焊缝为全熔透焊缝,等级为二级。
外形尺寸要求见下表:3.现场施工3.1现状调查在行车梁开工前,我专业公司组织了成员进行了行车梁制作焊接的检查,结合以前工程的经验进行了认真的讨论,认为行车梁制作最大的难点在于如何处理焊接变形问题。
我们在行车梁焊接的过程中采取一定的措施控制其变形量,但变形依然存在。
如果焊接变形不予以矫正,则不仅影响结构整体安装,还会降低工程的安全可靠性。
焊接变形超过技术设计允许变形范围,应设法进行矫正,使其达到符合产品质量要求。
矫正的方法都是设法造成新的变形来达到抵消已经发生的变形。
通过调查发现,一共有以下几个方面会造成焊接变形或者矫正不好:1火焰矫正的方法不正确2火焰矫正的温度不当3焊接工艺不对4单面连续焊接5割刀下料,单边受热而我们在吊车梁制作过程中将存在的主要问题是:火焰矫正的方法不正确。
焊接变形与控制措施
科技论坛焊接变形与控制措施李海涛(天津电力机车有限公司,天津300452)我们在焊接的过程中,焊件的局部温度会急剧上升。
构件由此会遭到损坏。
这是导致焊件变形的一个重要原因。
所以,我们可以从这里下手,来修护这种变形。
为了提高焊接的质量,可以通过观察焊接结构和焊接艺术进行修改还有焊接的技术等等。
1焊接变形与焊接应力产生的原因从实践观察中,我们观察到,导致焊接变形最主要的原因是焊缝里产生了变形应力。
焊接应力是什么呢?它就是焊接构件由于焊接而产生的应力。
前文我们也提到过,是因为焊接的时候产生不一样的温度,会引起局部发生塑性变形,而且比容不一样的组织也会使焊件发生焊接应力和变形。
焊接构件在焊接过程中会产生形状和尺寸的变化,导致这种变化的原因是在焊接的过程产生内应力。
焊接变形会对焊件产生极大的外观影响。
所以,我们要想改善这种现象,就要从焊接的过程和焊件的设计下手!以下介绍一些变形的原因。
1.1焊缝金属的收缩产生的变形我们焊接金属相当于给金属加热,金属之后会冷却,冷却的时候,金属会由液态转换为固态,体积会有,大的变化。
但是处于焊缝里的金属因为地方比较狭窄,自由伸缩性比较差,所以会导致变形。
就是这个原因会引起整个焊件的变形。
焊缝局部形成堵塞,会导致焊缝中的结晶部分会产生先后的收缩,先结晶的部分会阻止后结晶的部分,这个原因也会导致焊接应力与变形。
1.2焊件不均匀受热产生变形1.2.1焊件在加热过程中,会受到不均匀加热,如果温度达到构件的屈服点,构件就会产生变形。
等到冷却后,焊件就可能会有残留变形。
1.2.2加热的时候,焊缝和他的周围区域会产生压缩性收缩。
冷却的时候,压缩塑性变形区会产生相应的收缩。
1.2.3焊接过程中及焊接结束后,焊件的应力分布是不均匀的。
在焊接过程中和焊接结束的时候,应力不均匀的分布在焊件上,这个时候的残余应力是拉应力,一般会作用于焊缝和他的附近的地方。
1.3焊缝的刚性和拘束我们还发现了,对焊件应力与变形有较大的影响还有焊缝的刚性和拘束。
起重机械结构焊接变形的因素及控制分析

一、机械结构金属焊接变形理论1.金属焊接变形的基本原理金属材料处在高温的环境中,当温度达到材料的熔点,材料会熔化并发生热膨胀,材料发生挤压变形,产生弹性热应力,当热应力大于材料此时的屈服极限,材料的弹性变形会转化成塑性变形,导致冷却后的材料无法恢复产生残余应力,因此,材料的“热胀冷缩”是使材料发生变形的基本原因。
起重机械结构的焊接过程一般利用熔化焊,将需要焊接的区域进行加热,并加入焊接材料,带熔池形成后进行冷却硬化,因此,在焊接加热冷却过程中,焊接区域发生冷缩,非焊接区域发生热膨胀,产生残余应变导致材料的塑性变形。
尤其对于焊接零部件,微观的塑性变形,在宏观的表现为尺寸变形并带有弹性应变能。
对于单一构件,材料发生塑性应变的区域很少,因此,针对影响材料的焊接变形,考虑残余应变和弹性应变能,进而研究材料变形。
2.金属焊接变形的影响因素(1)材料属性对金属焊接变形的影响。
焊接区域的变形同时受到焊材和母材的影响,其力热属性决定了材料的膨胀和收缩程度,热传导系数小,温度变化的梯度大,温差大导致材料更容易变形。
热膨胀系数对材料的变形正相关,而且材料的力学属性会随着温度的变化而改变,通常情况下,较大的弹性模量会储存较大的变形能,所累积的残余应力更容易引起焊接变形。
(2)焊接结构对金属焊接变形的影响。
在焊接过程中,控制工件的拘束度可有效改善焊接变形。
工件本身的拘束度起主要影响,在设计时,焊接结构越复杂,拘束度越大。
因此,需要对为了增加结构刚性而添加的筋板或加强筋的数量和位置进行优化处理,可适当减小焊接过程中的工作量,同时,也能对焊接变形有削弱的作用。
(3)焊接工艺对金属焊接变形的影响。
焊接工艺可改变残余应力的位置和大小以减缓焊接变形,例如,改变焊接顺序、采用新的焊接工艺方法、调整合适的焊接工艺参数,同时,根据工作人员的累积经验,也可以采用特殊的加工工艺来改善残余应力,降低焊接变形。
二、机械结构焊接变形种类及产生原因在起重机械结构焊接过程中,其结构件的焊接变形种类有收缩变形、弯曲变形和扭曲变形。
工程机械大型结构件焊接变形控制方法

工程机械大型结构件焊接变形控制方法【摘要】本文就结合工程机械中的一些典型零部件的生产,对大型结构件的焊接变形种类与原因进行分析,并提出一些有效的控制变形的方法。
【关键词】大型结构件:焊接变形:控制方法1 焊接变形的种类在实际生产过程中,结构件的焊接变形主要有收缩变形、弯曲变形和扭曲变形。
具体焊接件会出现哪种变形,与焊接件的结构、焊缝布置、焊接工艺及应力分布等因素有关。
(1)收缩变形收缩变形是焊接变形的基本单元,焊缝的冷却过程是焊缝由液态转化为固态的过程,转化的过程中将产生焊接应力和焊缝体积缩小的现象,从而导致焊后焊接件外形尺寸减小。
收缩变形主要发生在简单结构的焊接件焊接中,由于焊缝少、焊缝的方向基本一致,使得各条焊缝收缩的方向一致,焊后仅出现收缩变形,使得焊件外形尺寸减小。
(2)弯曲变形弯曲变形是由多条焊缝的内应力和收缩变形结合的最终结果,多发生在焊接件外形细长且横截面的上下尺寸相差较大或焊缝分布不对称,以及焊接次序不合理的焊接件的生产中。
如工程机械的履带架、挖掘机斗杆的焊接,主要出现的是弯曲变形。
(3)扭曲变形扭曲变形是大型结构件焊接中最突出的焊接变形,由于大型结构件多数是框架式结构,焊缝布置不对称、板件尺寸不均匀、焊缝布置无规律,致使焊缝内应力的方向不一致、大小不均匀。
焊件变形的位置与方向难以预测,最终呈现扭曲变形。
如挖掘机的铲斗、摊铺机的熨平板,其焊后主要产生的是扭曲变形。
2 焊接变形产生的原因焊接变形不仅影响产品的外观和使用,过大的变形量还会导致焊件的报废,而造成直接的经济损失,这种现象在大型结构件的焊接中更为突出。
要想有效地控制焊接变形,前提是必须要找到焊接变形的原因所在,然后才能采取相应的控制方法。
焊接变形的原因比较复杂,主要有焊接应力影响、结构设计不合理、工艺制定不合理等因素。
(1)焊接应力:焊接应力是焊接变形的根源,每条焊缝都会产生一定大小和方向的焊接应力,焊缝结构越复杂,结构件焊接时产生的焊接应力大小、方向就越难以预测。
大型焊接结构件应力及变形控制工艺

大型焊接结构件应力及变形控制工艺摘要:为有效控制钢结构因焊件的不均匀膨胀和收缩而造成的焊接变形,对大型结构件焊接变形的种类和变形原因,焊接变形和焊接应力的各种影响因素进行分析,为了有效控制大型焊接结构件的焊接应力及变形、提高产品质量和合格率,提出了相应的控制措施。
关键词:大型结构件;焊接应力;焊接变形;控制工艺序言大型结构件在实际生产中是指体积庞大、自身质量大、由结构钢焊接而成的零部件,随着机械工业的发展,大型结构件在工业生产中被广泛应用。
在工程机械产品中,大型结构件是产品的骨骼.如挖掘机的中间架、履带架、斗杆、伸长臂和铲斗等都是由大量尺寸与规格不等的钢板焊接一起而成的结构件。
大多数结构件在焊后需经机加工才能使用.所以对焊接后的部分尺寸精度和位置精度的要求比较高。
但是由于生产时焊缝比较多,且结构复杂、焊接量较大,容易发生扭曲变形,如果变形量不能控制在一定的范围内,则3组销轴孔在镗削加工时就会因没有余量而无法加工,造成产品报废。
因而,急需采用合理的方法予以控制。
1焊接应力与变形产生的原因影响焊接应力与变形的因素很多,如焊件受热不均匀焊缝金属的收缩金相组织的变化及焊件刚性与拘束的影响,其最根本原因是焊件受热不均匀。
在焊接过程中,对焊件进行局部不均匀加热,焊后金属冷却沿焊缝收缩时,受到焊件低温部分的阻碍,因此整个工件纵、横向尺寸有一定量缩短。
如果在焊接过程中,焊件能够较自由的伸缩,则焊后焊件的变形较大,而焊接应力较小;反之,如果焊件厚度或刚性较大不能自由伸缩,则焊后变形较小而焊接应力较大。
圆筒形工件环焊缝焊接以后产生切向焊接应力,其应力大小与圆简直径D、工件厚度6有关,直径越大,厚度越厚则焊接应力也越大。
1.1 加热时引起应力与变形的原因1.1.1 均匀加热时的应力与变形受约束的杆件,如果加热温度较低,材料的变形在弹性范围内,则在加热过程中杆件的变形全部为弹性变形,杆件存在压应力的作用。
受约束杆件的变形属于非自由变形,既存在外观变形,也存在内部变形。
浅谈斗轮挖掘机履带车架制作工艺方法及焊接变形控制
浅谈斗轮挖掘机履带车架制作工艺方法及焊接变形控制【摘要】本文主要介绍了履带车架即Q390D、Q460D和G42CrMo4+QT 这种铸焊结构和高强度异种合金钢之间焊接通过焊接工艺评定,选用合理工艺参数,获得满意的焊接接头的工艺方法及焊接过程中的变形控制措施。
【关键词】工艺评定;异种钢焊接;工艺参数;变形控制主要研究内容:研究探索一整套大型斗轮挖掘机履带架部分的焊接典型工艺,其中主要难点为1、焊接性分析试验,根据工艺评定报告制定出合理的焊接工艺规程;2由于材质和板材厚度的特殊性,研究焊接变形特点,焊接收缩量预留;3主轴套,轴承体等孔距的尺寸保证。
焊接性分析:履带架板厚多为30mm、40mm两种,材料分别为Q390D,Q460D为低合金高强度结构钢。
Q390DC当量=C+Mn/6+(Cr+Mo+V)/5+(Ni+Cu)/15=0.2+1.6/6+(0.3+0.2)/5+0.7/15=0.61Q460DC当量=C+Mn/6+(Cr+Mo+V)/5+(Ni+Cu)/15=0.2+1.7/6+(0.7+0.2)/5+0.7/15=0.71履带架主轴套为铸钢件材质为G42CrMo4+QT,为德国牌号低合金铸钢。
其化学成份为:C当量=C+Mn/6+(Cr+Mo+V)/5+(Ni+Cu)/15=0.45+1/6+(1.2+0.3)/15 =0.72根据对Q390D、Q460D和G42CrMo4+QT碳当量计算分析,二者的碳当量都大于0.60,说明二者的可焊性较差。
1.下料各种板材按图纸尺寸下料。
下料采用数控与气割方法。
气割下料后应打磨剪切面的飞边、毛刺对需要曲型的零件边缘应打磨掉0.5mm,以防弯曲时产生裂纹。
由于板很厚,焊枪无法操作,经焊接性分析,应该将坡口改为30°,另外在切割坡口过程中一定要注意坡口的方向,尤其是对称制作的坡口。
根据车架结构特点,结构复杂,焊接量大,焊接后收缩量相当大,因此在履带车架长度方向上给予一定的补偿量,将补偿量均匀分布在各加强筋板之间,并要求预留2.5~3mm/m的补偿量。
梁焊接变形的控制

梁焊接变形的控制一、箱型梁焊接变形的控制焊接变形的控制,要从下料开始,对下料、组装、焊接等一系列工艺过程加以控制。
1、板件下料控制:⑴、下料前抛丸、矫平,接板后再一次矫平,以便消除应力。
⑵、通过梁的焊接变形计算,预算出梁在制造过程中每道工序的变形量。
根据计算或经验,确定合理的腹板下料拱度值。
⑶、保证筋板的直角,其偏差不大于H/1000。
2、组装焊接控制:⑴、水平弯曲的控制对于正轨箱型梁,根据JB1036-82《通用桥式起重机技术条件》的规定,其水平弯曲要向有走台的一侧弯曲。
为此,上盖板要预制水平弯,筋板与上盖板的焊缝应采取同方向、从无走台的一侧向有走台的方向焊接,并有规律地分散进行。
⑵、盖板水平偏斜度、腹板垂直倾斜度及主梁上拱度的控制根据JB1036-82《通用桥式起重机技术条件》的规定,箱型主梁上盖板水平偏斜的允许偏差b≤B/200,腹板垂直倾斜的允许偏差≤H/200,桥架组装后主梁上拱度为:F = 0.9L/1000~1.4L/1000将下盖板组装在п形梁上组成箱型梁后应进行检测,如果超差,应进行矫正,矫正时可利用螺栓拉紧器或千斤顶配合。
矫正的幅度必须考虑到后续焊接的变形方向及大小,避免过量、不足、甚至反向。
为了给后续的焊接和桥架组装留有余地,单根主梁的精度应严格控制。
例如上盖板水平偏斜度应按b≤B/250交检,腹板垂直倾斜度应按h≤H/250交检。
⑶、箱型梁焊接顺序的选择组装好的箱型梁经过矫正,应力释放后,焊接四条长焊缝。
如果主梁上拱度不足,可焊接下盖板与腹板连接的两条焊缝,然后再焊上盖板与腹板连接的焊缝。
否则相反。
另外,左右两条焊缝要同时、同方向、同规范进行施焊。
如果两侧不能同时焊,要先焊无走台侧,后焊有走台侧。
焊接变形量的大小与焊接方法也有关系,埋弧焊的变形量大,气体保护焊的变形量小。
二、桥架组装时变形的控制桥架组装焊接工序,包括主梁与端梁的组装焊接、走台的组装焊接、轨道及轨道压板的组装焊接等。
防止大型焊接件吊运时变形的措施

防止大型焊接件吊运时变形的措施摘要:近年来, 公司生产制造的大型、重型焊接件越来越多, 这些焊接件具有体积庞大、壁薄、外形不规则、重量大和挠性大等特点。
在起重吊运作业时, 吊运钢丝绳捆扎夹角大, 易造成工件捆勒变形。
重型、大型焊接件的翻转作业, 瞬间冲击力大, 也会造成工件变形。
薄壁和边沿有坡口的工件易勒伤, 额外增加校正和修复费用, 增加生产成本, 严重的质量事故还会导致工件报废, 影响产品出厂周期和生产计划的正常推进。
本文分析了防止大型焊接件吊运时变形的措施。
关键词:大型焊接件;吊运;变形措施;大型、重型焊接件吊运时, 工件易勒伤和变形。
采用新的吊运方法, 大幅降低工件的变形率, 杜绝勒伤等质量事故。
大型焊接件的焊接过程直接影响着焊接质量,也影响着焊接夹具装夹系统的合理布局,还影响着大型焊接件的焊接变形预测及控制。
一、原因分析在吊运作业时, 薄壁工件的边沿保护措施不恰当、吊索的选择不合理和作业工艺保守等导致工件质量事故频繁发生。
根据焊接件的特点和作业环境状态, 我们对传统吊装工艺作了完善和补充。
采用增加吊挂点, 使用辅具吊梁, 加固支撑, 调整吊绳夹角等方式, 确保薄壁细长工件不变形。
采用双钩接放, 工件不离支撑点的方式进行大型、重型工件的翻转,消除工件翻转过程中的冲击载荷。
二、防止大型焊接件吊运时变形的措施1.大型焊接件的外形不规则, 且体积庞大。
在进行此类工件的翻转吊运时, 我们编制较长的钢丝绳, 选择工件强度高、刚性好的部位系挂。
在钢丝绳的捆勒点经过的薄壁或强度低处加焊支撑, 并使用双钩多点支撑的作业方式进行吊运作业, 这样能很好的保护工件。
在翻转吊运以160 MN水压机翻转臂为代表的特大型焊接件时, 我们选用强度足够的废弃工件加焊挡板,制作成吊具用以作业, 有效降低了因钢丝绳水平分力对工件的勒压变形。
在吊运5 m轧机侧板等细长壁薄且挠性大的工件时, 使用多对吊索, 结合手拉葫芦有效控制工件的变形。
起重机械结构焊接变形分析及对策研究

起重机械结构焊接变形分析及对策研究发布时间:2023-01-12T05:41:31.175Z 来源:《中国科技信息》2022年第33卷第16期作者:兰立晓[导读] 起重机械结构焊接时,受到应力分布以及温度变化影响,可能会产生变形问题。
如果变形问题比较严重,兰立晓中广核新能源港口投资(陆丰)有限公司 516545摘要:起重机械结构焊接时,受到应力分布以及温度变化影响,可能会产生变形问题。
如果变形问题比较严重,就会对结构完整性能和使用可靠性能产生不良影响。
对机械结构焊接变形问题发生原因分析时,需从各方面影响因素全面控制,降低变形问题发生几率。
企业应提高对这项工作重视程度,采取有效措施,从根源上对变形问题进行全面防控,确保焊接作业在开展时能够发挥更大作用。
本文就起重机械结构焊接变形分析及对策进行相关研究。
关键词:起重机械结构;焊接变形分析;对策;研究起重机械结构是由多种零部件焊接形成,在焊接时如果出现变形问题,就会导致构件应用精度不断降低,还会引发焊接误差等问题,制作出来的起重机械产品整体结构性能比较差,无法满足市场及客户质量要求,且产品外形不够美观。
处理起重机械结构焊接变形问题时,需要投入较多的人力、物力资源,而且修补难度大,工作量也不小,给企业带来额外经济损失。
如果变形问题比较严重,结构无法全面修复,只能将产品进行报废处理,因此企业必须做好起重机械结构焊接变形预防[1]。
一、起重机械结构焊接变形分析(一)原因对起重机械结构焊接处理时,金属焊接构件容易出现变形问题,由于材料在高温作用影响下,温度达到材料熔点时,材料会出现熔化并发生热膨胀等问题,会导致材料形状发生一定改变,当产生的弹性热应力大于材料承受限值,就会引发变形问题,冷却之后材料无法恢复原有形状,在焊接区域还会受到压力影响,导致材料变形问题更加严重。
在对起重机械结构焊接作业前,一般选用融化焊技术,需要对焊接区域加热处理,再加入焊接材料之后,需要对材料冷却。
浅析起重机械焊接质量的控制策略

浅析起重机械焊接质量的控制策略良好的焊接质量控制以及管理的举措对于整个焊接操作来讲有着非同小可的作用,在机械制造活动中,焊接质量的提升更是不容小觑,它关系到机械制造行业的发展以及机械结构的稳定性,因此需要不断强化焊接件的质量管理与控制工作,为焊接件质量的提高奠定坚实基础。
标签:起重机械;焊接质量;控制策略目前我国的工程机械焊接件的外观质量没有达到最高目标,还或多或少地存在质量问题。
为了扩大焊接件的市场,对焊接技术提出了更高的要求,必须对外观质量方面进行严格的控制,提高焊接件的使用功能。
1、起重机械焊接中的常见缺陷分析1.1气孔气孔是起重机械焊接中的常见问题,是指由于焊接不平整而导致的表面凸起,而这些凸起中的气体在冷却过程中没有及时排出,因此形成了内部中空结构,这种结构脆性较强,一旦受到外力冲击,就容易发生断裂,会给起重设备的正常使用带来一定的问题。
焊接气孔大小不一,形状各异,按照其分布的位置不同,可以分为内部气孔、表面气孔以及焊接接头气孔,形状主要呈球形、条虫形等。
焊接气孔主要是因为焊接过程中电流太大、电弧太长或者焊接位置有锈、水或油污等杂质、焊接材料受潮等原因形成的。
1.2焊接程序流程所制定出的焊接程序其实对整个机械焊接过程都有了对应的固定形式,无论是哪一道程序不合格,都会影响到最终的焊接质量,一个质量符合出厂标准的零件或者设备一定是在严格的工件制作流程标准下产生的。
焊接程序的标准性是保证最终焊接质量的前提条件,这对于每一个产品制造企业来说都是极为重要的。
但是在部分小型企业中,判决程序的完善性并不符合质量管理标准,甚至为了节约成本,砍掉了一些可能在他们看来无关紧要的焊接程序,从而影响了最终的焊接质量。
1.3裂纹裂纹是焊接结构中最致命的缺陷,它是由于焊接应力过大、焊接温度差瞬间过大或者元素反应等原因造成的机械部件上出现的纵向或者毛状微细裂纹。
裂纹具有延伸性,所以起重机械的结构破坏很多都是从裂纹部位产生的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大吨位起重机履带梁焊接变形控制繆士超(徐工机械建设机械分公司,徐州221000)摘要:本文以Q U Y650T起重机为例,对其履带梁主体结构的焊接变形种类及控制方法进行研究,成功总 结出一套大吨位履带式起重机履带梁焊接变形的控制方法,对生产制造具有极强的实用意义。
关键词:履带起重机焊接变形控制引言履带式起重机是徐工机械建设机械分公司生产的主打产 品。
为抢占市场先机,适应企业发展,满足市场需求,公司立 足自主研发,向世界先进水平看齐,斥巨资研制开发了系列大 吨位履带式起重机。
在生产制造过程中出现的履带梁焊接变形 问题,一直是提高生产能力的一大瓶颈。
为解决这一难题,经 过不断摸索、试验,终于寻找到行之有效的反变形控制方法。
1焊接变形种类及影响常见的焊接变形有纵向收缩变形、横向收缩变形、角变 形、弯曲变形、波浪变形、扭曲变形、错变变形等。
QUY650 履带梁主体结构在制造过程中,由于焊接热源和焊接热循环 的特点以及装配质量不好、焊接顺序和焊接工艺参数选择不 当等因素,容易使其产生不同程度的、不同种类的变形。
焊件的焊接变形会造成尺寸及形状的技术指标超差,给 随后的装配带来困难,降低焊接结构的装配质量及承载能力。
发生焊接变形的构件需要矫正,因此浪费了大量的人力、物 力。
当焊件变形过大且难以矫正时,会导致产品报废,造成 经济损失。
经现场按比例多次跟踪测量发现,QUY650起重机 履带梁焊接变形,其立板挠曲变形大于或等于8mm;翼板波 浪变形,变形量大于或等于l〇mm,超出技术要求。
2焊接变形原因分析QUY650履带梁与车架采用动力销轴联接,用来承受整机自 重和作业载荷,这就要求履带梁结构要具有足够的刚度和强度。
履带梁为空间板焊接成封闭箱形与单腹板混合结构,上盖板、腹板、底板分别采用厚度为30_、30ram和50m m的Q550钢板。
影响焊接变形的因素主要有以下几点:(1)焊道在焊件中所处位置不对称;(2)装配及焊接顺序;(3)焊接热输入量的大小;(4)焊缝长度和坡口形式;(5)焊接操作方法。
3焊接工艺参数的选择合理的焊接工艺参数是保证焊缝质量的关键。
焊接工艺 参数主要包括焊接电流、电弧电压、焊接速度以及其他因素。
QUY650履带式起重机履带梁的主要焊接工艺参数如表1所示。
表1QUY650履带式起重机履带梁的焊接工艺参数焊接层数焊接电流I/A电弧电压U/V送丝速度ni/min 1210 〜22018 〜207〜92250 〜27520 〜257〜93260 〜28030 〜357〜9影响焊接变形的其他因素主要表现为拼点时对接间隙的 大小、焊接方法和焊接顺序。
铆工拼点时的焊缝间隙一定要严格控制。
间隙过大,容易产生焊瘤;过小,则易产生未焊透的现象。
4焊接变形的控制4.1履带梁的拼焊及定位焊前工件的装配及定位,对焊后的结构变形有很大的影响。
履带梁拼点时,要严格按照图纸和工艺要求进行。
以圆钢做工艺支撑,在两边立板与盖板之间每隔一米,点焊一个工艺支撑,防止翼板焊接角变形。
定位焊缝应对称点固,间隔40cm,长度一般控制在20mm,以保证有一定的强度。
为了尽量减少拼点误差,履带梁的拼点应该在平台上进行,并用工装夹具进行刚性固定,施焊过程也在焊接平台上进行。
这样既有利于工件的翻转,又能保持焊缝始终处于水平或最佳焊接位置。
4.2不同的焊接方法和顺序对变形的影响(1)对于相同板厚焊接结构,单道焊由于焊接热输入 量大,容易变生较大的焊接变形;而多层多道焊则相反,由于焊接热输入量小,产生较大的焊接变形就小。
(2)不同的焊接顺序对角变形的影响。
可以看出,多 层多道焊时,若焊接顺序不合理,同样会产生角变形。
因此,只有采取交替控制焊法,才能使角变形相互抵消。
(3)采用不同的焊接方向和顺序,可使每^小段焊缝产生的变形尽量减小或相互抵消,最终可达到减少总体变形的目的^由以上三点分析总结可知,合理的焊接方法和焊接顺序对控制焊接变形非常重要。
正确的焊接顺序,能够大大减小焊后的焊接变形。
4.3履带梁的焊接方法和顺序履带梁焊接时,可由两人从中间向两边同时施焊。
焊接过程中分层施焊。
第一层施焊焊缝I,焊缝从中间向两边交替跳跃对称焊接。
焊缝长约200〜250cm,不允许产生连续焊缝。
然后,翻转工件施焊对角线III,焊接方法同I。
同样的方法,依次焊接焊缝II和代。
第二道焊缝在第一道未焊接的地方施焊,同样采取从中间向两边交替跳跃对称焊接,焊缝长约200〜250cm。
第二层同样采用第一层的焊接方法,对角线交替跳跃对称焊接,从中间向两边焊接。
第三层属于外观焊缝焊接,为连续焊缝,焊接速度比前两次的焊接速度慢。
焊接参数可以稍大一些,但要严格控制热输入量,尽量减小对焊缝机械性能的影响。
焊接变形控制过程及成效见表2。
4.4运用反变形手段采用反变形的方法控制焊接变形,即根据焊接收缩余量补偿的经验及实验数据,适当预留收缩量,并(下转第162页)成损伤。
这时可以采用热继电器对其进行保护,或者使用过 流继电器,或者安装熔断器,以起到辅助配合作用。
第三,过电流保护。
机电设备过载运行或启动错误,容易产生较大 的过电流,进而损坏电动机换向器。
通常,采用过电流继电 器对电路实施保护,如图2所示。
备状况、生产工艺,简化线路,提高电控线路可靠性与安全 性等。
任何一项内容控制,都要竖持一定原则,不仅要保证 线路正常工作,还要对出现故障及故障产生的效果充分考虑,预先安排好线路,以做到“防患于未然”。
只有把各项工作 做好,才可确保机电设备电气控制顺利运行。
图2采用过电流继电器对电路实施保护第五,利于维修与操作。
实际配线与安装机电设备电气控 制过程中,要在每个电器元件留有一定的触点,特定条件下留 有备用元件;通过设置电气隔离,以免出现带电检修,确保控 制简单,以便调试。
通过设置多点控制,以做到生产机械旁调试。
当操作回路较多时,要将按钮用主命令控制器取代。
4总结机电设备电气控制涉及内容较为广泛,包括充分了解设参考文献[1] 李刚,雷肖伟.对机电设备电气控制注意事项的研宄[J].工程技术:文摘版,2015, (36) : 109.[2] 沈玉春.机电设备电气控制的注意事项探究[J].中国机械,2013, (11) <25.[3] 姜雅静.浅析机电设备电气控制的相关问题[J].中国科技博览,2015, (41) : 35.Matters Needing Attention in Electrical Control of Mechanical and Electrical EquipmentDUAN Junqiang(Zhengzhou Nissan Motor Co, Zhengzhou 451450)Abstract:Electrical mechanical and electrical equipment control in modem equipment design and production plays a vital role, this electrical mechanical and electrical equipment control concept, the basic principle is expounded, electrical line smooth effect analysis, proposes relevant attentions of electromechanical equipment and elecstric control.Key words:electrical control, mechanical and electrical equipment, matters needing attention(上接第160页)加上隔套,再做刚性固定,焊接完成冷却 后取下即可。
运用这种方法时,由于个人经验不一,需选择 不同的焊接方法以及合适的焊接工艺参数,从而将变形量控 制在技术文件允许的范围内。
这里不一一而述。
表2焊接变形控制结果对比表批次台套立板扭曲变形(麵)翼板波浪变形(圆>2/4281015122/62861082/8245665总结及推广应用生产实践表明,对于QUY650履带式起重机履带梁的焊接,在选取正确的焊接方法、采用正确的工艺参数的前提下,通 过运用交替跳跃对称焊和焊前反变形的手段,可以使其焊接 变形得以有效控制,很好地解决了其焊接变形问题。
既保证 了产品质量,又大大节省了生产制造过程中投入的人力、物 力和工时成本。
经过对QUY650履带梁挠曲变形和翼板波浪变形控制跟 踪总结,既解决了生产流程中的难题,又掌握了履带梁的焊接 要点•同时,通过举一反三,对大吨位履带式起重机其他产品 的履带梁焊接工艺及流程进行改进,大大提高了生产质量和生 产效率,为徐工建机履带式起重机的发展做出了积极贡献。
参考文献[1] 文银莲.GB/T16270-1996高强度结构钢热处理和空扎钢板、钢 带[S]. 1996.[2] 王晓澜,徐健.焊接工实用手册[M] •南昌:江西科学技术出版社,2005.[3] 周震.焊工[M].北京:中国标准出版社,2004.[4] 王云膜•焊接结构生产(焊接专业)[M]. 2版.北京:机械工业出版社,2007.[5] 张文明,焦万才.焊工实用技术[M].沈阳:辽宁科学技术出版社,2004.Welding Deformation Control of Track Beam of Large Tonnage CraneMIU Shichao(Xugong construction machinery branch, Xuzhou 221000)Abstract:This paper takes QUY650T crane as an example, the type and the control method of welding deformation of the track beam of the main structure, summed up the success of the method of controlling welding deformation of a large tonnage crawler crane track beam, it has a strong practical significance to the manufacturing.Key words:crawler crane, welding defonnation, control。