操纵装置设计
第5章_人机的信息界面设计(3)_安全人机工程学

5.1 人机信息界面的形成 主 要 内 容 5.2 视觉信息显示设计 5.3 听觉信息传示系统 5.4 操纵装置设计
5.5 操纵与显示相合性
5.3 听觉信息传示设计
5.3.2 言语传示装置
用语言传递人与机器的信息,使其具有一定的表达能力。传递和 显示言语信号的装置称为言语传示装置。
6
5.3.3 听觉传示装置的选择 1.音响传示装置的选择原理
在有背景噪声的场合,音响传示装置的频率选择在噪声掩蔽效应 最小的范围内。 使用断续的或音调有高低变化的声音信号,更能引起人的注意。 最好组成视、听双重报警信号。 音响信号传播距离远和穿越障碍物时,应加大声波强度,使用较 低的频率。 注意音响装置的多少,避免各信号间的相互干扰。
图5-13 常用手控操纵器的尺寸
19
5.4 操纵装置设计
5.4.3 脚控操纵器的设计
适宜的操纵力,参阅表5-21 脚控操纵器的尺寸
脚踏板:矩形,宽度>2.5cm,踏下行程6-17.5cm防滑齿纹; 脚踏按钮:取代手控,可快速操纵,直径5-8cm,行程1.2-6cm。
脚踏板结构形式的选择,见下图
效率:187
(a)操纵器与显示器方向相合性 (b)操纵习惯模式
28
5.5 操纵与显示相合性
5.5.3 操纵-显示的编码和编排相合性
重要的原则就是操纵-显示的编码应尽可能一致,见下图。
神七3名航天员心里相容性最高,见视频
29
作业与思考题
1. 2.
3.
4. 5. 6. 7. 8. 9. 10. 11. 12. 13.
位置编码 尺寸编码 颜色编码 符号编码
21
补充知识:相容性
所谓相容性(或一致性)是指刺激与反应间关系与人们预期 的一致的程度。
人机工程学-王版第5章操纵装置设计201410-student
• 脚操纵器主要有两种形式:脚踏板和脚踏钮。脚踏板的形 式又有直动式、摆动式和迥转式(包括单曲柄和双曲柄)
• 脚踏板能施加较大的操纵力,且操作也较方便,因而在无法用 手操作的场合,脚踏板得到了广泛的应用-汽车上高效利用。
– 按钮的尺寸主要按成人手指端的尺寸和操作要求而定。 一般
圆弧形按钮直径以8~18mm为宜, 矩形按钮以10X10、10X15或15X20mm为宜, 按钮应高出盘面5~12mm,行程为3—6mm,按钮间 距一般为12.5~25mm,最小不得小于6mm。
二、按键
• 节省空间、便于操作,便于记忆,使用熟练后,不用视觉也能迅速操 作。
–操纵器采用大小编码时,一般说来,大操纵 器的尺寸要比小操纵器的大20%以上,才有 准确操纵的把握,而这一点是较难保证的, 所以,大小编码形式的使用是有限的。
Size coding of controls is not as useful for coding purposes as shape, but there may be some instances where it is appropriate. When such coding is used, the different sizes should, of course, be discriminable one from the others.
和减少操作的复杂性
§4 按压式操纵器设计
• 按外形和使用情况,分为两类:按钮和 按键。
• 一般只有两种工作状态,如 “接通”、 “断开”。
• 操作方便、效率高
一、按钮
• 外形:圆形和矩形,有的还带有信号灯。用作系统的启动和关停。
–工作状态有单工位和双工位,单工位按钮是手按下按 钮后,它处于工作状态,手指一离开按钮就自动脱离 工作状态,回复原位;双工位按钮是一经手指按下就 一直处于工作状态,当手指再按一下时,它才回复到 原位。
人机工程学基础与应用-初级项目-项目2操纵装置产品设计

初级项目
项目2操纵装置产品设计
学习考评一
(1)搜集多种带有旋转式操纵装置的产品实例。
(2)对项目任务要求做好前期规划。
(3)根据活动一的学习步骤编写500字的调查分析报告,内容简明扼要,说明对“操纵装置设计”的初步认识和对本项目任务主要分析内容的理解。
学习考评二
(1)操纵装置是如何进行分类的?
(2)操纵装置都有哪些特征?
(3)根据活动二的学习步骤编写分析报告,内容简明扼要,图文并茂,说明对对本项目阶段性任务主要分析内容的理解。
学习考评三
(1)利用操纵器外观形状变化进行区分,以适应不同的用途,我们需要注意什么?(2)当操纵器数量很多,而形状又难以区分时,我们可以采用哪种形式的编码进行区分?(3)根据活动三的学习步骤编写分析报告,内容简明扼要,图文并茂,说明对对本项目阶段性任务主要分析内容的理解。
学习考评四
(1)旋钮设计按功能可以分为三种类型,每一种按传递信息的重要性可旋转的角度分别是多少?
(2)为了使操纵时手与旋钮不打滑,我们可以将旋钮做怎样的处理?
(3)根据活动四的学习步骤编写分析报告,内容简明扼要,图文并茂,说明对对本项目阶段性任务主要分析内容的理解。
考核标准
首先考核学习者对这个项目知识点的掌握;其次人机分析评价能力的掌握。
根据每一个项目学习目标与学习活动总结分析报告书,以图文并茂的形式对内容进行说明。
检测点
参考指标:知识点掌握度25%;评价分析参与度25%;作品完成度25%;互动态度25%。
第5章:人机信息界面(操纵装置设计)
三.操纵装置的特征编码与识别
形 状 编 码
在(a)、(b)、(c) 三 类旋纽之间不易混 淆,而同一类之间 容易混淆;(a)和 (b) 类旋纽适合作360 度以上旋转操作; (c) 类旋纽适合360 度以内旋转操作; (d)类适合作定位指 示调节。
旋纽的形状编码
操纵装置的类型及特征分析
三.操纵装置的特征编码与识别
在控制器上标以不同的文字或图形符号以区别不同的控制器。这种编 码的优点是,可以用示意性符号对每个控制器的作用给以直观性指示,不 需要事先去记忆每个控制器的功能和用途,减少了大脑译码的过程,因此 效率和准确度都较高。在设计符号时,这些符号应力求简单、达意、明显、
符 颜 号 色 编 码
按压式操纵器
按钮的设计 1.外形:常为圆形和矩形,有的还带 有信号灯。作用:系统的启动和关停。 分类:单工位和双工位。
按 钮 的 形 体 设 计
单工位按纽是手按后,它处于工作状 态,手指一离开按纽就自动脱离工作 状态,回复原位; 双工位的按纽 是一经手指按下就一直处于工作状态, 当手指在按一下时,它才回复原位2. 按纽的尺寸主要按成人手指端的尺寸 和操作要求而定。圆弧形按纽直径: 8—18mm ,矩形按纽10*10、10*15或 15*20,按纽应高出盘面5—12mm,行 程为3—6mm,按纽间距一般为12.5— 25mm,最小不得小于6mm。
旋转式操纵器
手轮—汽车方向盘—设计 ③高级轿车在方向盘中设置了一个空气袋,平时折合在立柱 顶端的一个圆盆中,一旦汽车发生碰撞使汽车骤然停止时气 袋就会自动充气,以保护司机的面部和胸部。同时还应保证 快速排气,及时排气,以免造成司机窒息。
旋转式操纵器
手柄的设计
手 柄 的 形 体 设 计
人机工程学教案
人体系统
基本概念:系统的重要特征在于系统的整体功能高于部分之和
人体系统设计程序:是按照系统论的方法而进行的一种总体设计
人体系统的设计方法:包括自成体系的设计思想和与之相应的设计技术
人机系统检查与评价
授课时间
第6次课,第6周 星期二第7-8节
课时
2
授课方式
理论课□ 讨论课□ 习题课□ 实验课□ 上机课□ 技能课□ 其他□
授课题目
第六章工作台椅与手握工具设计
目的与要求
了解控制台的形式和工作座椅设计的主要依据;了解办公台的设计要点;掌握手握式工具的设计原则。
人的因素:人是人机系统中最活跃的环节,也是最重要的环节,同时也是最难控制的环节
机器的因素:机器的因素主要对机械及电气系统进行归纳,在一定程度上也有普遍的代表性
环境的因素:环境因素包括生产,生活,室内,室外,自然,人工环境等
人机系统的综合研究内容:人机系统的综合研究的目的是为了得到系统的最佳效果
人机系统设计的一般程序
重点与难点
重点:视听觉机能及其特征,神经系统、运动系统的机能及其特征,人的信息处理系统的模型。
难点:人的信息处理系统的模型。
教学基本内容
方法及手段
肌肉
肌肉的生理特征:肌肉的人分类,肌肉的运动特征,收缩中的生理代谢
肌肉收缩与神经控制的关系:神经控制的作用方式,反射系统
肌肉施力:肌肉施力的分类,静态施力的生理效应,静态施力极限,减少静态施力设计
人体模板的应用:需要借助人体模板进行辅助制图,辅助设计或辅助演示
宋体五号左对齐(各部分内容的时间分配、板书安排、采用的教学方法和教学手段可在此加以说明)
3、操纵装置设计

按钮
3~5
10×5
1~8
用食指按压
10
12×7
12
18×8
15
20×12
按钮
18~30
8~35
用拇指按压
工作行程/mm
<2 2~3 3~5 4~6 3~8
按钮 用手掌按压
50
10~50
5~10
第三节 常用操纵器的人机学要素
一、按压式操纵器
(一)按钮和按键
设计注意事项 ①按钮颜色的选取。 ②用作两种工作状态转换的按键,附加显示当前状态的信号灯。 ③表面形状、触感、凸起高度、间距等都影响按键的使用。
第三节 常用操纵器的人机学要素
一、按压式操纵器
(一)按钮和按键
按钮常见;多个连续排列在一起的按钮称为按键。主要人机学参量有:截面尺寸、
操纵力(按压力)和工作行程。
表5-19 按钮按键的人机学参量(摘自GB/T 14775—1993)
操纵器及
基本尺寸/mm
操纵力/N
操作方式 直径d(圆形) 边长a×b(矩形)
字符和按键的排布 “柯蒂(Qwerty)”键盘存在三方面的宜人性缺陷。 ①打英文读物左右手负担比例为 57:43,对人群多数的“右撇子”不利。 ②A、S、I、O等常用字母由不灵活的小指、无名指敲击,分配不合理。 ③ 顶行的E、U、I、O属常用字母,要移动手部才能敲击,费时,不便。 1932年就有Dvorak的改进键盘问世,由于人们的“惯性”而未能流行。
第一节 人体施力与运动输出特性
二、反应时和运动时
反应时
• 指从刺激呈现到人开始作出外部反应的时间间隔,也称反应潜伏期。 • 影响反应时的有人体主观因素,和外界刺激客观因素。
第一节 人体施力与运动输出特性
控制装置
1.结构与造型
1)外观件结构对造型的影响 2)内部传动结构对造型的影响 3)避免“危险”的造型设计
2.材料与造型
1)造型材料的特性 (1)感觉物性
所谓感觉物性是通过人的器官感觉到材料的性能。如冷暖感、重量感、 柔软感、光泽、纹理、色彩等 木材:雅致、自然、轻松、舒适、温暖 钢铁:深沉、坚硬、沉重、冷凉 塑料:细腻、致密、光滑、优雅 金银:光亮、辉煌、华贵 呢绒:柔软、温暖、亲近 铝材:白亮、轻快、明丽 有机玻璃:明澈透亮、富丽 造型设计对材质的选用是根据不同的产品特性和功用,相应的选用满 意的造型材质,运用美学的法则科学的把它们组织在一起,使其各自 的美感得以表现和深化,以求得外观造型的形、色、质的完美统一
(2)选用脚动控制器的原则 ① 用于需要连续进行操作,而用手又不方便的场合。 ②无论是连续性控制,还是间歇性控制,其操纵力都在 超过5kg~15kg的情况下。 ③手的控制工作量过大,不足以完成控制任务时。
(3)脚动控制器的位置尺寸 一般脚踏板偏离人体正中位置不得超过75mm~125mm。 在坐姿时,当操作力很大时,踏板的高度可与椅面相平或稍低, 但不得超过椅面高度,若是站立操作,则脚踏板的高度不得超 过地面250mm,最佳为200mm或稍小些。
造型与人机工程—控制装置设计
视觉显示装置起着传递信息的作用,而操纵 控制装置则起着执行信息传递的作用。设计控制 装置时,首先要考虑操作者的性别和人的生理尺 寸,使之适应人体的生理结构特点,从而达到提 高工效及使操作者能够准确、迅速、安全、连续 操作的目的。
1.控制装置的类型与选择
1)控制装置的类型: 按操作的动力区分,可分为: ①手动控制器:如按键、开关、手柄及转轮等 ②脚动控制器:如脚踏板、脚踏钮等 ③其他:如声控、光控等这些利用敏感元件的换能装 置来实现启动或关闭的机件。 2)控制装置的选择 应遵循的一般原则: ①快速、精细的操作,主要采用手动或指动控制器。 用力的操作应采用手臂及下肢控制。 ②手动控制器应安排在容易接触到和易看到的空间。 ③对于按钮,它们的间距应为15mm,各手控制器的 间距不小于50mm。 ④旋钮适用于费力小、移动幅度不大及高精度的阶梯 式或连续式调节 ⑤长臂杆、手柄、手轮、踏板则适用于费力、幅度大 和低精度的操作。
第六章 操纵系统设计

三、操纵件的造型
操纵件不仅用来完成操纵系统的任务,而且也是一种 装饰和点缀品。 1.手操纵件的造型
(1)设计手柄式操纵减少时,要重视柄部的形状和尺寸。 (2)为了便于记忆,各操纵件最好采用不同形状的柄部 或者不同颜色的按钮。 (3)采用旋转式操纵减少时,最好在按钮上的手捏部分 设计成一头尖的形状,或做上醒目的标记,用它来指明 旋转的刻度位置。
片刻视力范围是在短时间内部疲劳地看清楚物体的范围。 有效视力范围是注意力集中才看清物体的范围。 视野是指头部和眼球固定不动地观看正前方所能看 视野 见的空间范围。颜色对视野也有影响,白色的视野 最大、其次为黄色和蓝色,绿色的视野最小。 视距是指人的眼睛清晰辨认物体的正常观察距离。 视距
二、操纵件的布置
人体不动的情况下,上、下肢能舒适达到的范围。 (3)操纵灵活 (4)操纵件定位可靠 操纵件应能长时间可靠地保
持在某一操纵状态的位置,不因其他非操作力的作
用而改变其操纵状态。而且,操作件一旦因为某种 原因而偏离操作位置时,应有自动回位功能。 (5)操纵灵活、效率高 对 操纵者所发指令的反映灵敏而准确,而且能量传递 的损失小,效率高,有利于减少操纵力。 (6)操纵系统的反馈准确迅速 好 的反馈性,使操纵信号准确迅速地反馈给操纵者, 以便操作者及时判断操作的效果,并作出新的操 操纵系统应有良 操纵系统中的执行件应
操纵系统的主要参数有操纵力、操纵行程和传动比。 1.操纵力 由操纵力的计算公式可知,若操纵系统的传动机构 确定,则传动比和传动效率就既定,因此,操纵力 决定于执行件的工作阻力,工作阻力应按最经常出 现的最严重工况时的工作阻力来计算操纵力。
2.操纵行程 操纵行程是指执行件从初始位置移动到完成操纵 任务时的位置,操纵件所具有的相应位移量。操 操 纵行程的大小应使人体在不移动位置的情况下能 方便自如的达到。 方便自如的达到。 3.传动比 操纵系统的传动比为传动件的主动力臂与从动力臂 之比,其值决定于传动机构中 构件的尺寸,应按在克服最大操纵力阻力时所在的
多绳摩擦提升机钢丝绳操纵装置设计

摘要目前,多绳摩擦提升机调绳、换绳、换容器的维护检修工作大多使用悬挂夹、木绳夹、辅助绞车等辅助设备配合使用的方法。
此方法停产时间长、工作量大、危险、效率低,影响矿井的生产,所以很有必要改进方法,提高效率。
本文设计了一套多绳摩擦提升机钢丝绳操纵装置。
该装置主要是由两套由楔块组构成的夹持装置组成,一套固定,一套活动。
其中任一套夹持装置均能同时把一个容器的所有钢丝绳夹紧,并承受全部载荷。
通过负载交替传递到两套夹持装置的方法,使提升容器上提下放或移动一定的距离,从而使钢丝绳松弛下来,这样就可以方便的进行调绳、换绳、换容器等工作。
该操纵装置的主要特点是:①可以夹持一个容器的所有钢丝绳。
②可以承受一个容器的最大负荷。
③可以松绳进行提升机或绳轮的维护、检修。
④操纵装置由液压控制,动作准确,安全可靠。
关键词钢丝绳;操纵装置;设计AbstractCurrent,the maintance worke in multi-rope friction winder such as relieving the rope,shortening the rope or relieving the container ,was currently carried out by the combined use of suspension clamp ,rope clamp and auxiliarly winder.This tehniques not only extendes the ilding period,but also increases the amount of load and lowers the productiving ,and it is very dangerous .So it is necessarly to improve the method and to lift high-efficiency.I have designed a wirerope operation device.The device was made up of two sets of holding device(one is positioned,one is movable).Everyone of the device can clamp all the ropes and bear all the load.It can lift or lower the container or move it for a certain distance,to relax the rope by transmitting the weight to two sets of holding device alternatively .In this way we also can have some operations such as relieving the rope shortening the ropes or relieving the container.The device has the following main characteristics:1.To suspend all the wire ropes in the intervale of a shaft.2.To carry the whole or partilal load in the intervals of a shaft in condition of maximum-load.3.To maintain or repair the elevator or rope wheels by relaxing the ropes.4.The device can act accurately and safely with hydraulic control.Keywords wirerope operation device design目录1 绪论 (1)1.1 提升机的发展 (1)1.2 提升机的钢丝绳换绳 (3)2 概述 (4)2.1 设计要求 (4)2.1.1 目的 (4)2.1.2 要求 (4)2.2 操作装置的原理与结构 (5)2.3 装置的操作步骤 (6)2.4 装置的特点 (7)3 夹持装置的设计 (9)3.1 夹持装置的原理 (9)3.2 楔块的设计 (10)3.2.1 楔块的材料 (10)3.2.2 楔块斜度的确定 (10)3.2.3 楔块的形状与尺寸 (11)3.3 链传动的设计 (12)3.3.1销轴链条的设计 (12)3.3.2 链轮的设计 (14)3.4圆柱滚子的设计 (16)3.4.1 材料的选择 (16)3.4.2 滚子的作用 (16)3.4.3 形状与尺寸 (16)3.5夹紧装置的布置 (17)4 液压系统的设计 (19)4.1液压回路的设计 (19)4.2 液压元件的选择 (19)4.2.1 液压泵的选择 (19)4.2.2 电动机的选择 (21)4.2.3 电磁换向阀的选择 (21)4.2.4 减压阀的选择 (21)4.2.5溢流阀的选择 (22)4.2.7 二位二通阀的选择 (22)4.2.8滤油器的选择 (22)5 升降油缸的设计 (24)5.1 确定基本参数 (24)5.1.1 外负载 (24)5.1.2 初选工作压力 (25)5.1.3 液压缸的主要尺寸 (25)5.2缸筒的设计 (25)5.2.1 材料的选择 (25)5.2.2 技术要求 (25)5.2.3尺寸的计算 (25)5.2.4 缸筒厚度验算 (26)5.3 液压缸的结构设计 (27)5.3.1 缸盖与缸筒的联系方式 (27)5.3.2 拉杆设计 (27)5.3.3端盖的设计 (28)5.4 活塞的设计 (29)5.4.1 活塞的材料 (29)5.4.2 活塞的结构以及活塞的联接方式 (29)5.4.3 活塞的技术要求 (29)5.4.4 半环的设计 (29)5.4.5 活塞的密封 (30)5.4.6 活塞的形状和尺寸 (31)5.5活塞杆的设计 (31)5.5.1 活塞杆的材料的选择 (31)5.5.2 活塞杆的结构 (31)5.5.3 活塞杆的技术条件 (31)5.5.4 活塞杆强度的校核 (32)5.5.5 活塞杆端部结构的设计 (32)6 拉伸油缸的设计 (35)6.1 确定基本参数 (35)6.1.1 外负载 (35)6.1.2 液压缸的主要尺寸 (35)6.2缸筒壁厚和外径的计算 (36)6.2.2 缸筒厚度验算 (37)6.3 油缸的结构 (37)6.3.1 前端盖的设计 (37)6.3.2 后端盖的设计 (40)6.4 活塞杆的设计 (41)6.4.1 活塞杆材料的选择 (41)6.4.2 活塞杆的结构 (41)6.4.3 活塞杆的技术条件 (41)6.4.4 活塞杆的强度校核 (42)6.4.5 活塞杆稳定性的计算 (42)6.4.6活塞杆的密封 (43)6.4.7 杆端单耳环 (44)7 总体安装设计 (45)7.1 移动夹持装置的安装 (45)7.1.1升降油缸的安装 (45)7.1.2 活动楔块的安装 (45)7.2 固定夹持装置耳朵安装 (47)7.3 液压站的安装 (47)8 装置的控制 (48)8.1 升降油缸的控制回路 (48)8.2 移动夹持装置的拉伸油缸的控制回路 (48)8.3 静夹持装置的拉伸油缸的控制回路 (49)8.4 二位二通阀的控制 (49)8.5电机的控制 (49)结论 (50)致谢 (51)参考文献 (52)中英文翻译 (53)1 绪论1.1提升机的发展当前,煤炭科技工作以提高经济效益和技术水平为中心,重点发展综采放顶煤技术,锚杆支护技术,防治重大瓦斯和煤尘事故的可靠技术,洁净煤技术和建设高产高效矿井的综合配套技术。
显示装置与控制装置设计的原则
具体实施的可能性和方法,最后按人机系统要求的
精确度、效率、劳动强度以及可靠性等条件对该显 示—控制系统进行评价。
显示装置与控制装置系统的评价方法,目前还处
于研究阶段。美国邦尼(Bonney)和威廉斯 (WiIliams)于1977年设计了CAPABLE(显示装
使用频率、重要性及运动方向原则之外,还要考虑 各种控制器本身操作特点,将其布置在这种控制的 最佳操作区域之内。如颜色编码控制器应布置在最 佳视觉域之内;位置编码控制器应安排在习惯的操 纵位置上等,以使控制器的位置有利于其编码的识 别。此外,联系较多的控制器应尽量互相靠近,控 制器的排列和位置要符合其操作程序和逻辑关系, 还应适合人左右手及左右脚的能力。
2. 动态显示 上述对机器运行中各部分的状态,进行的检查显
示是对机器作的静态显示。而动态显示则要求描述 出机器的运行过程,为了这个目的,常常将显示机 器完成工作过程的仪表构造成模拟的形态,或组合 成一幅系统运行模型的动态图案。这种仪表群的实 例很多,如高炉控制显示仪表板,等等。
铁路信号室及调度室中的大型显示板也属于动态
①最快的反应区域在视中心上 下8o,右45o左10o的范围内, 这个区域明显地偏向右方,在 此,视中心区域也是视力最好, 最清晰,因而认读效率最高的 区域。
②随着反应速度下降,等反应
时间曲线的扩大,上述偏右的 现象逐渐减弱,但始终有一定 约有偏量,可见仪表布置靠右 比靠左有利;
③在对角线上,右下角135o方 向的视区优于其它三个(45o、 225o、315o)方向的视区。
显示仪表群。它采用各种显示器具组合成形象的站 场列车动态显示系统,这种综合显示省去了很多解 释抽象仪表的时间,同时也降低了差错率,因此大 大提高了显示效果。
第五章 操纵器设计

V
第二节 人体的施力与运动输出特性
5、坐姿的脚蹬力 图中的外围曲线就是足 蹬力的界限,箭头表示 用力方向。可知最大蹬 力一般在膝部弯曲 160°时产生(书上讲与 铅垂线成70°)。脚蹬 力也与体位有关,蹬力 的大小与下肢离开人体 中心对称线向外偏转的 角度大小有关,下肢向 外偏转10°时的蹬力最 大。
V
第三节 操纵器设计的人机学原则
手指按压——凹陷轮廓。按钮:圆形、矩形 按键:矩形 3-5mm的可做成球面或者平面形状圆柱、圆 锥、卵形、椭球 手指操作的扳钮开关、转换开关——柄部圆柱形、圆锥形 或棱柱形。
手掌按压——?
第三节 操纵器设计的人机学原则
四、操纵器的尺寸与操作行程
①操纵器上手脚握持、触压、抓捏、抠挖部位的尺寸, 应与人的手脚尺寸相适应——静态尺寸 ②操作行程,应与人的关节、肢体活动范围相适应—— 动态尺寸
图 不同角度位置上拉力与推力分布图
V
第二节 人体的施力与运动输出特性
4、握力 男子优势手的握力约为自身体重的47%~58%,女子约为 自身体重的40%~48%。所有肌力均随施力持续时间加长 而逐渐减小。例如某些肌力持续到4分钟时,就会衰减到1 /4左右,肌力衰减到1/2所持续时间,对多数人是基本 相同的。
V
第一节 手足尺寸与人体关节活动
2、人体的其他关节活动 人体全身主要关节活动范围见书表5-4。 思考:自行车设计过程中涉及到哪些人体尺寸?
静态:手宽、脚宽、前臂宽、臀宽、胯宽 动态:臂的功能极限尺寸、腿的机能极限尺寸
V
第二节 人体的施力与运动输出特性
一、人体的肌力及其影响因素
1、人体主要部位的肌肉力量 人体施力来源于肌肉收缩的力量,称为肌力。见书表5-5 身体主要部位肌肉能产生的力值(单位N)。 女性的肌力比男性低20%~30%。右利者右手肌力比左手 约高10%,左利者左手肌力比右手约高6%~7%。 工作的操纵力主要是臂力、握力、指力、腿力或脚力,有 时也用到腰力、背力等。操纵力与施力的人体部位、施力 方向和指向(转向),施力时人的体位姿势、施力的位臵、 施力时对速度、频率、耐久性、准确性的要求等多种因素 有关。
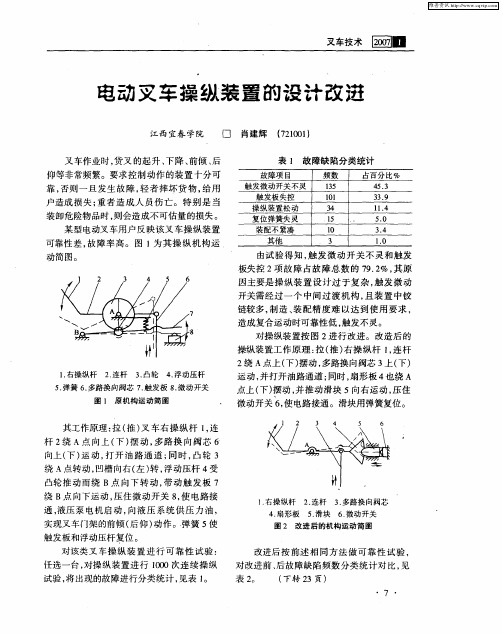
电动叉车操纵装置的设计改进
边 线
面
平 面
旋转 1四个特 征, 【 ” 选择 文件 】另存 为】 【 命 令 , 保存 为】 在【 对话柜 中选 择 【 存类型 】 保 为
5 库特 征 的使 用
() 1新建一 零件 文件 , 伸一 个 4m 拉 5 m长 、
的话 , 只修 改一下草 图的尺寸 即可。还可 以 把 V带轮槽做成三个或 四个槽 的库特征, 如
直径在 10 m以上的圆柱体。 0r a
果把它们插 入到两个槽 的 目标 文件 当中, 那 () 2 选择【 插入 】 【 一 库特征 】 命令 , 【 在 插 么在插 入后编 辑草 图把 多余 的草 图删 去 即 入库特征 】 对话框 中定位 到上一步保存 的 v 可。至于做成几个槽 的 , 这就根据 自己的使
维普资讯
电 动 叉 车 操 纵 装 置 的 设 计 改 进
江西 宜春 学 院 口 肖建辉 (20 1 7 10 ) 表 1 故 障缺 陷分 类统 计
故障项 目
触 发 微 动 开 关 不 灵 触发板失控 操 纵 装 置松 动
叉车作业时 , 货叉 的起升 、 下降 、 前倾 、 后 仰等非常频繁。要求控制动作 的装置十分可 靠 , 则 一旦 发 生 故 障 , 者 摔 坏 货 物 , 用 否 轻 给
入 到库 中 的特 征 图标 中有 一 个 绿 色 的 “ ” L 形
状。
在创建库特征 的时候 可灵活运用 , 比如在创 建 V带 轮 槽 的库 特 征 的时候 , 以把孔 及 孔 可
人机工程学4显示操纵

2011-3-22
12
显示及操纵装置设计
二、信号显示设计
1、信号灯显示的特点 特点:面积小、视距远、醒目、简单明了,但信息负荷 有限,信号太多时,形成杂乱或干扰。 作用:指示(如灯塔、交通信号灯), 显示工作状态 通常一种信号指示一种状态或情况。
2011-3-22
13
显示及操纵装置设计
2、信号灯设计 ⑴ 信号灯视距与亮度 信号灯与背景的亮度和亮度比,能见度 ⑵ 信号灯的颜色 ⑶ 稳光与闪光信号的闪频 ⑷ 信号灯布置 与仪表布置相似 ⑸ 信号灯的形状、组合与编码
2011-3-22
19
显示及操纵装置设计
各种箭头形状的比较
2011-3-22
20
显示及操纵装置设计
§3 听觉信息传示设计
一、听觉信息传示装置 二、听觉信息传示装置的设计、选用原则
2011-3-22
21
显示及操纵装置设计
一、听觉信息传示装置
特点: 反应快,可配置在任一方向,用语言通话时的应答 性好 应用场合: 信号简单、简短,要求传递迅速,传示后无须查对, 只涉及过程和时间性事件,视觉负担过重或环境不利 于采用视觉信号,人员处于巡视状态,并需要从干扰 中辨别信号。 种类: 铃、蜂鸣器、汽笛、警报器、喇叭、枪声、锣声等
2011-3-22
27
显示及操纵装置设计
二、手控操纵装置设计
1、操纵手把的设计 (1) 手把的形状应与手的生理特点相适应; (2 )手把的形状便于触觉对其进行识别; (3)尺寸应符合人手尺度的需要,
2011-3-22
28
显示及操纵装置设计
2、适宜的操纵力范围
手控操纵器的最大用力
操纵器 允许最大用力, N 5 30 4.5 20 操纵器 前后向杠杆 左右向杠杆 手轮 方向盘 允许最大用力, N 150 130 150 150
操纵装置设计的一般原则
操纵装置设计的一般原则稿子一:嗨,亲爱的小伙伴们!今天咱们来聊聊操纵装置设计的那些事儿。
你知道吗,操纵装置设计可重要啦!第一个原则就是要让人用着顺手。
就好比咱们拿筷子吃饭,要是筷子太长或者太短,是不是都不方便?操纵装置也一样,得符合咱们人手的自然动作和习惯,这样操作起来才轻松又高效。
还有啊,它得容易被咱们看明白。
不能搞得太复杂,一堆按钮和标识,让人眼花缭乱,都不知道该按哪个。
简单清晰,一目了然,这才是王道。
另外,反馈也很关键哦!当咱们操作的时候,装置得给咱们一个明确的反馈,让咱们知道自己的操作有没有起作用。
就像手机按键,按下去有震动或者声音提示,心里就踏实多啦。
再说说舒适性,要是操作个装置把咱们的手弄疼了或者累着了,那可不行。
得考虑人的手部受力情况,材料也要选好,不能太硬太粗糙。
安全更是重中之重!不能有那种容易误操作导致危险的设计。
操纵装置设计得处处为咱们使用者着想,这样咱们用起来才开心又放心!稿子二:亲人们,今天咱们来唠唠操纵装置设计的一般原则。
你想啊,要是一个操纵装置设计得不好,那用起来得多闹心!比如说,尺寸不合适。
如果太小,手都握不住;太大,又拿不稳,这可咋整?所以得刚刚好,就像给自己量身定做的衣服一样。
还有操作力度也有讲究哦。
太轻了吧,容易不小心就碰到;太重了呢,操作几次手就酸了。
得找到那个让人感觉不累又不会误碰的力度。
标识也特别重要哟!得清楚明白,不能模模糊糊的。
比如说,红色的按钮可能表示危险,绿色的表示安全,一看就懂,不用费劲去猜。
而且呀,操纵装置得放在顺手的地方。
如果要伸长了胳膊,或者弯着腰才能碰到,那多麻烦。
另外,操作的流程也要简单。
别弄一堆步骤,绕来绕去,把人都绕晕了。
能一步到位的,就别搞三步。
还有哦,稳定性也不能忽略。
不能说操作着操作着就出故障了,那可不行。
反正呢,操纵装置设计得贴心,咱们用起来才顺心,是不是这个理儿?。
操纵装置设计》ppt课件讲义

• 讨论一个问题
1】选择什 么操纵装置 控制大门? 2】为什么?
6.2操纵装置的选择
如何选择操纵装置?
主要是按使用功能和操作要求进行选择,这对于安 全生产、提高工作效率非常重要。一般应遵循如下几 个原则:
使用功能【执行信息特征】:
• 启动制动
2】按功能分 • 开关控制器:用简单的开或关实现起动或停止的纵控
制。如按钮、踏板、手柄等。 • 转换控制器:把系统从一个工作状态转到另一个。
如手柄、选择旋钮、操纵盘等。 • 调整控制器:系统的工作参数稳定地增加或减少。
如手柄、按钮、旋钮、操纵盘等。 • 紧急停车控制器:用于最短时间内产生制动效果,
1.手动控制器设计考虑的因素 • 设计手的接触物时应避免将受力集中于
掌心和指骨肌,防止受压受震而引起难 于治愈的痉挛,至少也减少了手的疲劳 和操作不准。 • 形状应便于触觉对它进行识别。 • 尺寸应符合人手尺度的需要。
手动控制器设计中,有旋钮、按键、操纵手把等。
2.旋钮设计
• 旋钮种类:其形状可分为圆形、多边、指针旋钮和手动转盘 等。 (a)适于微调,(b)力量可大些,(c)旋钮上带有指 示刻度线。
• 不连续调节
• 定量调节 • 连续调节
操纵装置类型
• 数据输入
每一类操纵装置的特点 描述的角度:使用功能、使用情况
觉
6.2操纵装置的选择
如何选择操纵装置? 操作要求,一般应遵循如下几个原则: • 快速、精细的操作,主要采用手动或指动控制器。用力 的操作应采用手臂及下肢控制。 • 手动控制器应安排在容易接触到和易看到的空间。 • 按钮的间距应为15mm,各手控制器的间距不小于50mm。 • 手揿按钮、旋钮适用于费力小、移动幅度不大及高精度 的阶梯式或连续式调节。 • 长臂杆、手柄、手轮、踏板则适用于费力、幅度大和低 精度的操作。
4人机工程学-操纵装置设计
4.2 人体的施力与运动输出特性
4.2.1 人体的肌力及其影响因素
(一)人体主要部位的肌肉力量
一般女性的肌力比男性低20%-30%。 右利者右手肌力比左手约高10%; 左利者左手肌力比右手约高6%-7%。 操纵力:人们使用器械、操纵机器所使用的力。 主要指机体的臂力、握力、指力、腿力或脚力,有时也用 到腰力、背力等
4.4.1手控操纵器的设计
(二)操纵手把的设计 讨论:在这些手柄中,哪种最好,简述理由。
4.4 常用操纵器的设计
4.4.1手控操纵器的设计
(二)操纵手把的设计
4.4 常用操纵器的设计
4.4.1手控操纵器的设计
(二)操纵手把的设计 讨论小结:a、b两种好。 理由:手掌上肌肉最厚的是大小鱼际肌、其次是指骨 间肌和指球肌,是天然避震器。 掌心肌肉最薄,神经、血管集中,要避免此处受压。
第4章 操纵装置设计
4.1 4.2 4.3 4.4 4.5 人的手足尺寸与人体关节活动 人体的施力与运动输出特性 操纵器的类型与选用 常用操纵器的设计 操纵与显示相合性
4.1 手足尺寸与人体关节活动
4.1.1 人体手足尺寸
(一)人体手足尺寸
4.1 手足尺寸与人体关节活动
4.1.1 人体手足尺寸
(一)人体手足尺寸
4.4 常用操纵器的设计
4.4.1手控操纵器的设计
(二)操纵手把的设计 1、设计合理的操纵手把,主要考虑以下几个方面: 手把形状应与手的生理特点适应 手把形状应便于触觉对它进行识别。
4.4 常用操纵器的设计
4.4.1手控操纵器的设计
(二)操纵手把的设计 手把应符合人手尺寸的需要。
4.4 常用操纵器的设计
4.4 常用操纵器的设计
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脚动操纵器
脚控操纵装置有两种类型:脚踏板和脚踏钮 脚踏板又分直动式、摆动式和回转式(包括单 脚踏板 曲柄式和双曲柄式) 直动式中,有以脚跟为支点的脚踏板,如汽车 的加速踏板;有脚悬空的脚踏板,如汽车的制 动踏板。
脚控操纵的尺寸
操纵装置设计
大纲
概述 ●操纵器类型与选用 ●常用操纵设置 ●操纵器的形状与式样 ●适宜的操纵力范围和尺寸 ●脚控操纵器的设计 适宜的操纵力 脚控操纵器的尺寸 脚踏板结构形式的选择
●
概述
操纵装置又称操纵器、控制器、控制装置。 。 操纵装置 是将人的信息输送给机器,用以调整、改 变及其状态的装置。操纵装置将操作者输 出的信号转换成机器的输入信号。因此, 操纵装置的设计首先要充分考虑操作者的 体型、生理、心理、体力和能力。操纵装 置的大小、形态等要适应人的手或脚的运 动特征。用力范围应当处在人体最佳用力 范围之结构形式的脚踏板,其操纵 效率是不同的。下图表示不同类型脚踏板的对比 试验结果。图中按编号(a)-(e)顺序,在相同 条件下,相应的踏板每分钟脚踏次数分别为187、 178、176、140、171.实验结果表明,每踏一次, 图(a)所示踏板所需时间最少。图(b)(c)(e)所 示踏板所需的时间一次增多,而图(d)所示踏板 所需的时间最多,比图(a)所示踏板多用34%的 时间。 脚控操纵装置的空间位置直接影响脚的施力和 操纵效率
操纵装置的选用原则
1 手控操纵器适用于精细、快速调节,也 可用于分级和连续调节。 2 脚控操纵装置适用于动作简单、快速、 需要较大操纵力的调节。脚控操纵器一般 在坐姿有靠背条件下选用
常用操纵装置设置
操纵器的形状与式样
操纵器的选择 根据操纵器的功能特点和使用操纵器的具 体条件(如使用要求、空间位置、环境因 素等)初步选择工作效率较高的几种形式, 然后考虑经济因素进行筛选确定。
脚踏板一般设计成矩形,其宽度与脚掌等宽为 脚踏板 佳,一般大于2.5cm;脚踏时间较短时最小长度 为-7.5cm;脚踏时间较长时为28-30cm;脚踏行 程应为6-17.5cm,脚踏表面应有防滑齿纹。 脚踏按钮是取代手控按钮的一种脚控操纵器, 脚踏按钮 可以快速操作。其直径为5-8cm,行程为1.26cm.
不同类型脚踏板操纵效率的比较
对于蹬力要求较小的脚控操纵装置,为了使坐姿 操作时脚的施力方便,大、小腿间的夹角以 105°-110°为宜。
THE END
谢谢观赏
操纵器的类型与选用
类型 1.按操控方式分 可分为手动操纵器、脚动操纵器、声控操纵器等操控类 型。 也可分为自动操纵器、遥控操纵器等操控方式。 2.按操控运动轨迹分 手动操纵器按操控运动的轨迹可分为: 旋转式操纵器:如旋钮、摇柄、十字把手、手轮等。 移动式操纵器:如操纵杆、手柄、推板开关等。 按压式操纵器:如按钮、按键等。 3.按操控功能分 一般分为开关式操纵器、转换式操纵器、调节式操纵器、 紧急停车操纵器等类型。
适宜的操纵力范围
操纵器所需的操纵里要适中,不仅要使其用力不 超过人的最大用力限度,而且还应使其用力保持 在人最合适的用力水平上,使操作者感到舒适而 又不易引起疲劳。由于人在操纵时需依靠操纵力 的大小来控制纵量,并由此来调节器操纵活动。 因此,操纵力过小则不易控制,操纵力过大则易 引起疲劳。
操纵器的适宜尺寸
操纵器设计的一般原则
1.要适应于人的生理特点,便于大多数人使用 操作。 2.运动方向要同机器的运动状态相协调‘ 3.操纵器要容易辨认 4.尽量利用自然的操纵动作或者借助操作者身 体部位的重力进行操作 5.在条件许可的情况下,尽量设计多功能的操 纵器 6.操纵器的造型设计,要求尺寸大小适当、形 状美观大方、式样新颖、结构简单,并且给操 作者以舒适的感觉