液压挖掘机动臂的有限元分析
液压挖掘机工作装置有限元分析
2 . 3液压挖掘机 工作装置有限元集成模态分析 当液压挖 掘机 工作装置中的液压系统频率和外界的作用在与工 作装置 规范 要求的频 率相 接近时,那么在很大程度上都会加剧工作 装置 发生振 动的情 况。当工作装置的结构由于轻量化而引起大幅度 的振 动时,就需要对 液压 挖掘机 工作装 置利用有限元模态进行有效 的分析。建成工作装 置的有限元模 型后,要对工作装置的有限元结 构进 行动态模态分析 ,在得到 2 O阶谐调频率和 振型。当工作装置 中 的斗杆和铲 斗的刚度 相对 来说比较小时,那么各阶频率对液压挖掘 机工作 装置 产生比较明显的影响。工作装置的各阶振型在体现 出液 压系统具有 自身固有的空间特性时,主要是体现 了工作装置 的各个 部件的侧向和铲斗在扭转变形或者是系统的回转变形 。另外 ,铲斗 中的物料也会对液压系统产生重要的影响,在考虑物料对液压系统 产生的影响后,那么就可 以降低液压系统中原本固有 的频率 ,那么
油缸 。因此 ,为 了建立液压挖 掘机 工作装置 的三维几何模型,可 以 严格 的按照液压挖掘机 的主要参数 , 相应的采用 u G 软件 技术 。 在建 立液压挖掘机工作装置三 维模 型时,必须要将螺纹孔去掉 ,保证不
会对计算 结果 的倒角 以及运输 吊耳 等环节产生影响。另外 ,要按照 连续处 理的方法 对实 际模 型进 行焊 缝,同时要按照与母材相 同的材 料进行处 理,然后装置成一个几何模型 。 1 . 2液压挖掘机工作装置有限元模型 的建立 通常都是将薄钢 板进行焊接从而构建成液压挖掘机工作装置的 实际结 构。构成 有限元的几何模型一般都是非常复杂的 ,因此在划 分有 限元模型 的单元类 型时主要都是选择三维实体单元 。
2 液压挖掘机工作装置集成有限元分析 2 . 1液压挖掘机 工作装置有 限元集成强度分析 在对 液态 挖掘机工作装置有限元集成强度进行分析 时,利用现 进行的液压挖 掘机工作装置为例子 。该工作装置的动臂行业斗杆液 压缸作 用力臂最大,铲斗和斗杆铰点以及斗杆与动臂铰 以及斗杆与动臂
挖掘机动臂有限元模态分析
中 图分 类 号 :H1 ,U 2 文 献标 识码 : T 6T 6 1 A
挖掘机工作装置的传统设计多采用静力计算确定工作装置
当系统的 自由度很大时对这样一组耦合方程进行求解将非 模态分析方法就是以无阻尼的各阶主振型所对应的模态 的受力 ,依靠 安全系数的选取保证其强度及 可靠性的经验方法 , 常困难 。 1解耦 , 变成各个独立的微分方程 。 对 而未能充分考虑其工作 过程 中所受动态载荷带来 的冲击与振动 坐标来 代替物理坐标使式( ) 问题 。挖掘机作业过程中工作装置时刻处于振动之 中, 且其振动 式() 1 进行拉氏变换后得到: 怕【] ) ()_ ) () s c+ { s }( } 2 陶 x 5
r dotntos e w i r asltfens adpat a rs i i .tatte o e 5moe r i u i w t s hc ae boue rees n r i etco A s. r1 dsae e t a h c c l rtn l h f aotdadetn e.sihrn eunyadm i ir i oeirve e.h td rvdsi— dpe n xeddI n eetrqec n anv a o m d s eiw dTes y poie m— t f b tn u p r t oe p a eefr ayio m cv o, dipoiefu dt no eaa s — ot dl a m tro l sf a o e aa ra t rvds on ai t l i o d n a m r n a s r f x t n o f h n y sf y n ip r r neadot i i rcua ya i caat ii frt m o cv o dte m f a c e omac i z o o s utr dn c hr esc o ea e aa ra n p m a nf t t l m c r ts h r f x t n h
浅谈挖掘机的动臂有限元及改进设计
吴 元 峰
【 日立建机 ( 中国) 有 限公司 安徽 合肥 2 3 0 0 0 0 ]
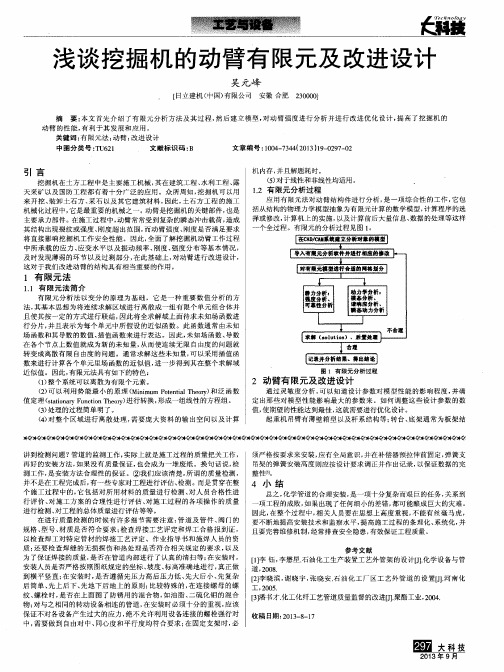
摘 要: 本文 首先介 绍 了有 限元分析 方法及其 过程 , 然后建 立模型 , 对 动臂强度 进行分析 并进行 改进优 化设计 , 提高 了挖掘机 的 动臂 的性能 , 有 利于其发 展和应用 。 关键词 : 有 限元 法 ; 动 臂; 改进设计
ቤተ መጻሕፍቲ ባይዱ
讲到检测 问题 ?管道的监测工作, 实际上就是施工过程的质量把关工作, 再好的安装方法 , 如 果没有质量保证 , 也会 成为一堆废纸 。换句 话说, 检 测工作, 是安装方法合理 性的保证 。⑦我们应 该清楚 , 所谓 的质 量检测, 并不是在工程完成后 , 有一些专家对工程进行评估 、 检 测 。而 是 贯 穿 在 整 个施工过 程中 的, 它包括对所 用材料 的质 量进行检 测、 对人 员合格 性进 行评价 、 对施工方 案的合理性 进行评估 、 对施工过程 的各项 操作 的质量 进行检测 、 对工程 的总体质量进行评估等等 。 在进行质 量检测 的时候有许 多细节需要注 意 : 管道及管件 、 阀门的 规 格、 型号 、 材质是 否符合要 求: 检查焊接 工艺评定 和焊工合格 报到证 , 以检查焊 工对 特定管 材的焊接工 艺评定 、作 业指导 书和施焊人 员 的资 质; 还要检 查焊缝 的无 损探伤和 热处理是 杏符合相关规 定的要 求, 以及 为了保 证焊接 的质量 , 是否在 管道 内部进行 了认真 的清扫等 ; 在安装 时, 安装人 员是否严格按照 图纸规 定的坐标、 坡度 、 标 高准 确地进行 , 真 正做 到横平竖 直; 在安装 时, 是否遵循 先压力 高后压力低 、 先大后小 、 先复杂 后 简单 、 先 上后下 、 先 地下后地上 的原则 ; 比较特殊 的, 在连接螺 母 的螺 纹、 螺栓 时, 是否在上 面图 了防锈 用的混合物 , 如油脂 、 二硫化钼 的混合 物: 对 与之 相同的转动设备相连 的管道 , 在安装 时必须 十分的重视 , 应该 保 证不对 各设备产生过大 的应 力, 绝不允许利用设 备连接的螺栓强行对 中, 需要做 到 自由对 中、 同心度和 平行度均符 合要求 : 在 固定支架 时 , 必
液压挖掘机动臂有限元分析方法研究
A b s t r a c t : T  ̄i n g a c e r t a i n t y p e o f h y d r a u l i c e x c a v a t o r ( 2 0 t ) t h e r e s e a r c h o b j e c t 。b a s e d o n t h e s e a ml e s s c o n n e c t i o n f o
T h e na a l y s i s me t h o d c a d q u i c k l y b u i l d e n t i t y a n d in f i t e e l e m e n t mo d e l a n d c a r t g u ra a n t e e t h e q u li a t y fg o r i d a n d c o m p u t ti a o n l a e f i f c i e n c y . A t t h e 3 O ; l  ̄ e t i m e , i t a l s o s o l v e t h e s h ri a n g o f t h e i f n i t e e l e m e n t m o d e l i n d f i f e r e n t c o n d i t i o n s nd a t h e s i m u l a t i o n
摘
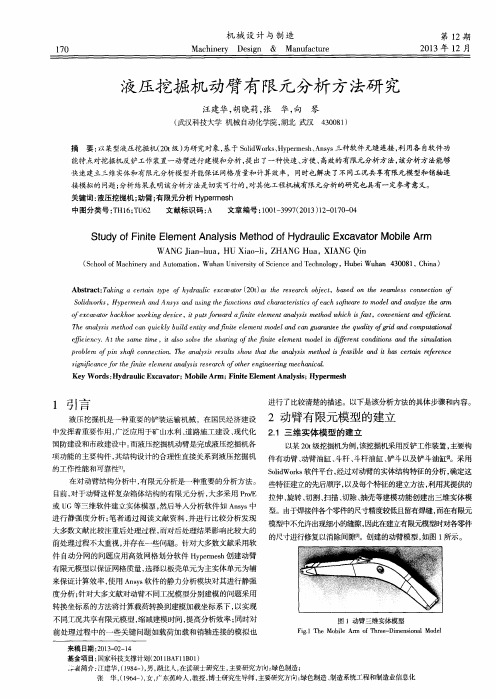
要: 以某型液压挖掘机 ( 2 0 t 级) 为研 究对 象, 基于 S o l i d Wo r k s 、 H y p e r m e s h 、 A n s y s 三种软件无缝连接 , 利 用各 自软件功
能特点对挖掘机反铲工作装置一动臂进行建模和分析 , 提 出了一种快速 、 方便 、 高效的有 限元分析 方法, 该分析方法能够 快速建立三维 实体和有限元分析模 型并能保证 网格质量和计算效率,同时也解决了不 同工况共享有限元模型和销 轴连 接模拟的问题 ; 分析结果表明该分析方法是切实可行的, 对其他工程机械有限元分析的研究也具有一定参考意义。
挖掘机动臂的有限元分析
5 . 2工 况 二
挖掘机处 于停 机面最大挖掘半径处 , 铲 斗挖掘 , 铲斗在发挥 最 挖 掘机处于铲斗挖掘 , 铲斗在发挥最大挖掘力位置进行挖掘 。 大挖掘力位置进行挖掘。 经计算 ,工况二 中动臂 最大 变形量 为 2 . 3 1 3厘 米 ,最 大应 力 该位置 出现在斗杆油缸全缩 , 铲斗齿尖 、 斗 杆与铲斗铰 接点及 2 6 7 . 7 M P a , 与许用应力 3 4 5 MP a 相 比, 该工况位置的受力是安全 的。 斗杆与斗杆油缸铰接点这三点处 于同一直线上 , 且大臂油缸缩进使 5 - 3工 况 三 铲斗齿尖处于地面上。 工况三 中动臂最 大变形 量为 2 . 1 4 4厘米 ,最大应力 2 9 0 . 3 MP a , 1 . 2 工 况 二 与材料许用应力 3 4 5 M P a 相比, 该 工况位置 的受力安全 。 挖掘机处 于最深挖掘位置处 , 铲斗挖掘 , 铲 斗在发挥最 大挖掘 6 结 论 力位置进行挖掘。 根据 P r 0 , I Ⅵ E c H A N I A c A计算 可知 , 在三种 工况下 , 挖掘 机在工 此位置 出现在动臂油缸全缩 , 即动臂位 置最低处 , 此 时斗杆与 况三状态时, 即挖掘机处于动臂 、 斗杆最大受力位 置 , 挖掘机 动臂 的 斗杆油缸铰接点 、 斗杆与铲斗铰接点及铲斗齿尖在 同一直线上且垂 受力最大 , 这也和工程实 际相 符 , 工况 三位置挖掘机 动臂 的受 力依 直于挖掘面 。 然安全 , 由此可以得出 , 本挖掘机动臂结构完全符合结构强度要求 。 1 . 3 工 况 三 , 参考文献 大臂 、 斗杆处 于最 大受力位置处 , 铲斗在发 挥最大挖掘 力位置 【 1 1 康 海 洋. 液 压 挖 掘 机 动臂 结 构动 态分 析 [ D 1 . 进行挖掘 。 [ 2 】 杨彩红, 马永杰 . 基 于有 限元的挖掘机 动臂性 能优 化分 析[ J ] . 机械
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析
基于Pro/E5.0和ANSYSWorkbench14.5的挖掘机动臂有限元分析文章以反铲挖掘机的动臂为研究对象,对挖掘机最典型的几种工作状况进行分析,利用Pro/E和ANSYS Workbench两种CAE软件,先在Pro/E中建立了液压挖掘机动臂的三维模型,再对模型进行了强度分析和变形分析,给挖掘机动臂的设计提供了依据。
标签:挖掘机;工作装置;动臂;有限元前言挖掘机是工程建筑机械的主要机种之一,在建筑、交通、采矿、国防及城市建设等土石方施工中起着十分重要的作用。
随着应用范围的日益扩大,在设计理论和方法、分析和研究手段也有了质的飞跃。
本文利用PRO/E建立挖掘机的动臂模型,经Pro/E算出各铰点的受力情况,再利用ANSYS Workbench14.5对动臂的结构强度进行分析。
充分利用这2种CAE软件各自的特点,从而提高对问题的分析效率和计算精度。
1 动臂模型的建立反铲挖掘机的结构如图1所示,其工作装置主要有铲斗、铲斗液压缸、斗杆、斗杆液压缸、动臂以和动臂液压缸。
先对动臂实体结构特征进行分析,确定这些结构特征建立的先后顺序和每个实体特征的建立方法,保证模型所包含的参数尺寸尽量少,结构特征尽量简单。
分析和确定结构特征后,建立动臂模型。
Pro/E 提供了完整的建模功能,利用拉伸、旋转、切割、扫描、切除和抽壳等基本功能和曲面设计,建立工作装置的实体模型。
2 Pro/E与ANSYS对接3 动臂有限元分析3.1 定义单元属性、材料有关特性目前,绝大多数挖掘机的工作装置为不同厚度的16Mn钢材焊接而成,其屈服强度在275MPa附近。
Workbench实体单元类型采用默认的SOLID187,由于Workbench中没有16Mn,需添加新材料赋予新属性,设置动臂材料的基本参数如表1所示。
3.2 动臂网格划分一个好的网格非常重要,可以在求解过程中将误差降低到最小,避免引起数值发散和不正确得到不准确的结果,甚至还会导致不能求解。
单斗液压挖掘机的有限元静强度分析
对450LC单斗挖掘机的有限元静强度分析(机械工程与材料能源学部学号:***)摘要:本文使用ANSYS有限元方法对450LC液压挖掘机的动臂进行静力强度分析,包括利用中性面法进行有限元动臂模型的建模、单元和实常数的确定、网格划分、计算载荷的确定、施加约束和载荷、刚度与变形的分析等,得出动臂的应力云图与应变图,找出其受力最大的区域。
关键词:挖掘机单斗反铲工作装置动臂中性面法单元实常数映射网格1 挖掘机挖掘机是用来开挖土壤的施工机械。
它是用铲斗上的斗齿切削土壤并装入斗中,装满土后提升铲斗并回转到工作地点卸土,然后再使转台回转、铲斗下降到挖掘面,进行下一次挖掘。
单斗挖掘机是只有一个铲斗的挖掘机。
挖掘机是铲装运输机械中的重要一种,在国民经济建设中发挥着重要的作用,广泛的应用于矿山水利、道路施工建设、现代化国防建设和市政建设中。
图1 单斗反铲挖掘机图2反铲工作装置和动臂反铲装置主要由动臂、斗杆,铲斗、动臂液压缸、斗杆液压缸、铲斗液压缸和四杆机构等组成。
反铲主要用于挖掘停机面以下的土壤、基坑和沟壕等。
是中小型挖掘机的主要工作装置。
挖掘机工作装置在工作过程中其受力与运动的情况都比较复杂,主要体现在:(1)作业对象千变万化,在多种土质条件与复杂的建筑工地现场使用,受力情况比较复杂;(2)在工作过程中,每一个运动都是有2个或2个以上的部件参与工作;(3)在挖掘的过程中,受拉压、扭转与振动冲击等多种载荷的作用,且随着挖掘机姿态的不同,挖掘力的大小于方向都在不断发生着变化,因而实际的挖掘力是不确定的。
动臂是由左右侧板、上下盖板、前插板及其它辅助结构件等,动臂是挖掘机的关键件,也是主要承力部件。
3动臂的有限元分析XYZ 45boom图2 挖掘机动臂实体模型图通常情况下需要首先建立几何模型,然后根据几何模型生成有限元模型。
在几何模型建立之前,需要先分析实体的结构特征,确定这些特征建立的先后顺序,以及每个模型的建模方法,使所建立的几何模型尽量准确接近物体的几何结构,但对于结构形式非常复杂,而对于要分析的问题来讲又不是很关键的部位,应根据实际情况进行简化,使特征尽可能的简单,参数尺寸尽可能的少,以便降低建模难度,节约工作时间。
液压挖掘机动臂应力应变有限元分析
统给 出的一系列要求后就可以进行求解 。 求解是 自动完成
输入信息进行调整 , 输入后重新求解 。
F铰点 : 内侧 施加 Y 方向的约束 , 施加 X 、 Y、 Z方向 的 载荷 ; 外侧不加约束 , 但施加 x 、 Y、 Z方向的载荷。
7 动臂有 限元分析结果
弹性 模 E = 2 . 1 2 x 1 0 M p a 。 6 求解
通过对动臂有 限元模型施加 设计载 荷及约束 , 完成 系
的。 在 系统 处 理 求 解 过 程 中 , 若 要 详 细 了解 求解 过 程 的信 C铰点 : 内侧施加 X 、 Y 方向的约束 ; 外侧施加 X、 Y 、 Z 息, 通 常把 o u t p u t 窗 口放 到桌面 的最前面 。在 求解过程 中 方向的约束 , 均 不加 载 荷 。 如 果出现求解过程 中断现象 , 对 中断原 因进行 分析 、 研 究 B铰 点 : 施加载荷不加约束。 D铰 点 : 施加 载 荷 不 加 约 束 。 和 判断 ; 中断 不 能排 除 时 可 以 尝试 返 回 开 始 界 面 , 通 过 对
B外 侧 D 内侧 D外 侧 F内侧
F外 侧
— 1 1 1 7 0 0 - 2 6 2 3 4 — 2 6 2 3 4 6 5 4 8 0
4 3 4
— . 1 6 5 9 0 — 4 2 2 6 — 4 2 2 6 - 1 8 2 1 6
2 6 9 5 2
压 缸 作 用 力 作 为载 荷 依 据 动 臂 的 结 构 特 点 和 受 力 状 况 施
图 4 动臂各铰点载荷图
加在 动臂上 ,将动臂与斗杆 的连 接铰点作 为外载荷处理。 时受到 Z向力的作用。另一种 结构如 图 5 ( b ) 所示 , 动臂头 在有 限元分析时对动臂的各铰 点进行 约束和 施加 载荷 , 处 部 的轴固定在侧板上 ,动臂头部的一侧受力 ,另一侧不受
基于ANSYS液压挖掘机动臂的有限元分析_李丹

G J’3 K +H’3 K + I 方 向 进 行 约 束% 释 放 J 方 向 的旋转 ! % 用以模拟铰接运动 $ 3 K + J"
9 6 7! 铰点处载荷的处理 工作装 置 各 构 件 通 过 销 轴 连 接 % 在 计 算 工 况 中不考虑偏载的影响 % 可以认为其只承受 H’ I方 向的力 % 整个 结 构 为 静 定 结 构 % 可 计 算 出 动 臂 各 铰点的反力 $ 在 实 际 结 构 中 % 铰 点 处 的 受 力 并 非 集中力 % 为模拟实际情况 % 作如下假定 ! 见图 & " & ! *" 载 荷 在 H >I 平 面 * # " d范 围 内 按 余 弦 分布 # ! " 分布力的方向为沿销孔表面的法向 # !
C?D 6 C?% 6 O >^ > C* < 6 +
% %C?D 对动臂下铰点( 的力臂 & 6 ! >% % %C?% 对铰点( 的力臂 & 6 e ! >%
! " 0
式中 ! % % 动臂液压缸推力 ቤተ መጻሕፍቲ ባይዱ 6 +% * 对铰点 ( 的力臂 &
% % 挖掘阻力的法向分力$取C " $ ! C !C ? %% ? %< ? D# = 6 7! 铲斗挖掘阻力 铲斗挖 掘 时 土 壤 切 削 阻 力 随 挖 掘 深 度 的 改 变 而有明显 变 化 $ 切 削 阻 力 与 切 削 深 度 基 本 上 成 正 比 $ 前半过程 切 削 阻 力 较 后 半 过 程 高 $ 因 前 半 过 程的切削角 不 利 $ 产 生 了 较 大 的 切 削 阻 力 $ 其 切
挖掘机动臂的有限元分析
挖掘机动臂的有限元分析挖掘机是一种广泛应用的工程机械。
尽管如此, 也往往是仿制, 缺乏建立在科学分析基础上的设计方法。
由于挖掘机作业的外载荷复杂多变, 难以采用传统的方法分析其结构特性。
我采用有限元方法对某挖掘机动臂的工作状态进行了分析, 对各国类似工作装置的设计有一定的借鉴意义。
该挖掘机的工作装置为反铲工作装置, 主要由动臂、斗杆、铲斗以及动臂油缸、斗杆油缸、铲斗油缸组成。
动臂、斗杆和铲斗均由高强度钢板焊接而成的箱形结构, 动臂根部用一根销轴铰接在平台前端中部, 由两只铰接在转台前部的动力油缸支撑。
油缸作伸缩运动, 动臂作升降运动, 其结构如图 所示。
1. 动臂有限元模型的建立及分析模型的简化动臂的整体式弯臂采用大圆弧过度以减小该处的应力集中, 结构简单, 重量轻。
其主体框架由上盖板、下盖板、左侧板、右侧板焊接而成。
在建立有限元 模型时, 由于一些小构件对整体刚度影响很小, 如焊接上的限位板、吊耳等, 均予以忽略。
载荷的分析:根据国内几种反铲装置的构件近似重量表2-7]7[查出:满斗处于最大半径时,整个的工作装置的总重量为: 5.37654321≈+++++++=T G G G G G G G G G 总t 即:力F ≈3500kg ×0.98=.3430N其中,q G T )8.16.1(~=, 在这里取1.6q由于载荷种类多, 分布复杂, 许多载荷要等效成节点力。
动臂模型应该是边界上全部给定载荷的平衡结构。
铰销外载荷的处理: 在挖掘机的铰接装置中, 铰销是铲斗与斗杆、斗杆与动臂、动臂与油缸之间的传力体, 受力情况比较复杂。
以往对销与销孔之间接触应力的研究缺乏理论依据, 都是按余弦分布等假想分布形式进行等效处理。
实际其间的接触应力的分布与材质、接触方式、配合公差等诸多因素有关。
其中,动臂应力分析图的研究属性和应力结果为:1).零件属性2).材料属性3).载荷和约束信息载荷集约束4).研究属性5).应力结果位移结果).67).安全系数8).结论通过对模型的有限元计算及试验分析可看出,用板壳单元建立的该有限元模型是可靠、合理的, 并且说明用有限元方法对液压挖掘机的动臂进行分析是一种行之有效的方法, 它可以全面掌握动臂的强度和刚度, 从而指导结构的设计。
液压挖掘机动臂有限元分析研究
运 用 H p r eh软件 创 建 动 臂 的 有 限元 模 型 , 危 险 工 况 下 , 用 A S S软件 对 其 进 行 静 强度 分 析 , 出动 臂 的应 力 和 y em s 在 使 NY 得 变 形 云 图 . 而为 挖 掘 机 的 设 计提 供 参 考 。 从
关键 词 : 压 挖 掘 机 液 动臂 有 限元 分 析
道 路 、 利 、 矿 以 及 建 筑 等 工 程 中 , 国 民 经 济 与 国 水 采 在 家 建 设 中 起 着 十 分 重 要 的作 用 由 于 产 品 更 新 换 代 的
速 度 加 快 , 短 新 产 品 的 研 发 周 期 变 得 非 常 重 要 。 挖 缩 对 掘 机 工作 装置 进行 有 限元分 析 . 高 研 发效率 . 符合 提 正
斗 油 缸 的 主 动 推 力 、 、 对 C 点 的 力 臂 e 、 r 影 G,及 ,Z 3
响 . : 得
=
( l + 3 3/3 Gr 3 Fe )r c
() 3
4 )整 机 稳 定 性 所 限 制 的 切 向 挖 掘 力 . 挖 掘 机 有 当
前 倾 趋 势 时 的 切 向 挖 掘 力
液 压 挖 掘 机 动 臂 有 限 元 分 析 研 究
口 冯显松 口 杨 为 口 魏攀科
重庆
口 段成财
重 庆 大 学 机 械传 动 国家 重 点 实 验 室 摘
404 o04
要 : 某 液 压 挖掘 机 为研 究 对 象 , 其 工作 装 置进 行 受 力 分 析 。 使 用 Po nier 件 对 其 动 臂 进 行 三 维 建 模 , 以 对 rE g e软 / n
这 样 的 发 展 趋 势 [-3 1 l ] ]
液压机械臂连杆有限元分析

液压机械臂连杆有限元分析液压机械臂连杆是机械臂中的重要部件之一,其主要功能是将液压力转化为机械运动力,实现机械臂的运动。
为了确保液压机械臂连杆在工作中的稳定性和可靠性,需要进行有限元分析,并对分析结果进行优化。
本文将从有限元分析的基本原理、分析方法和优化方式等方面进行探讨。
一、有限元分析的基本原理有限元法是一种数值分析方法,其中将连续的物理现象离散化为有限数量的元素,并通过求解元素之间的方程来解决整个问题。
有限元法应用广泛,尤其是在工程领域的结构力学问题中。
对于液压机械臂连杆的有限元分析,需要首先将其模型离散为有限数量的元素。
接着建立节点和单元的坐标系,并确定每个元素的节点编号和连接方式。
然后建立有限元节点的位移方程和约束方程,通过有限元法求解所有节点的位移和应力值。
最后,根据分析结果对加强结构和优化设计进行指导。
二、有限元分析的方法液压机械臂连杆的有限元分析方法主要包括以下几个步骤:1.建立几何模型液压机械臂连杆的几何模型可以使用CAD软件建立。
建立几何模型时需要考虑连杆的尺寸、形状、连接方式等因素,以确保几何模型与实际情况尽可能符合。
2.网格划分在建立几何模型之后,需要对连杆进行网格划分,将其离散为有限数量的元素,这些元素包括三角形、四边形、六边形等,其中以四边形和六边形为主。
3.材料参数的确定在进行有限元分析之前,还需要确定液压机械臂连杆的材料参数,包括弹性模量、泊松比和密度等。
根据这些参数,可以建立有限元的材料模型,对连杆进行静力学分析。
4.应用约束条件在建立完几何模型、确定元素类型和材料参数之后,还需要施加约束条件,以模拟实际工作情况。
特别是对于液压机械臂连杆来说,还需要考虑液压作用力的影响,因此需要将液压作用点模拟为连接点,进而将施加在该点上的力和力矩作为边界条件施加到有限元模型上。
5.求解方程通过有限元分析软件对有限元方程进行求解,并计算有限元的位移、应力和应变分布情况。
分析结果可以用于指导结构的加强和优化设计。
液压挖掘机动臂有限元分析研究

图 2 动臂有限元模型 Fig.2 3-D FE model
动臂的材料选用 Q235,参数见表 1
表 1 工作装置的材料类型及参数 Tab.1 Types and parameters of manipulator’s material 弹性模量 E/GPa 泊松比 210 0.3
材料 Q235
密度/(t·m-3) 7.85
Study on finite element analysis of arm of hydraulic excavator
Feng Xiansong, Yang Wei, Wei Panke, Duan Chengcai
(State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044) Abstract: In this paper, take the hydraulic excavator for example, the force analysis of manipulator is done. Its arm’s 3_D model is established based on Pro/E. Using Hypermesh build arm’s finite element model, then static structural analysis about the arm is carried on via Ansys under dangerous conditions. Afterwards,the stress and displacement deformation contour diagrams are obtained. Therefore,this approach will provide theory basis for design of hydraulic excavators. Key words: hydraulic excavator;arm; finite element analysis
液压挖掘机动臂应力应变有限元分析
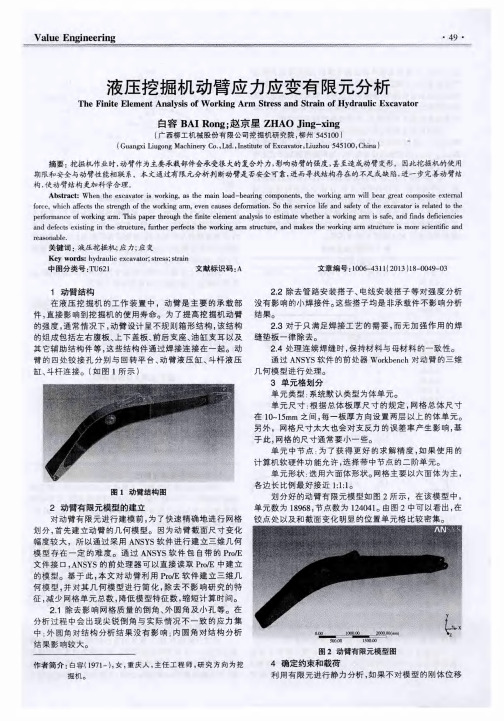
液压挖掘机动臂应力应变有限元分析作者:白容赵京星来源:《价值工程》2013年第18期摘要:挖掘机作业时,动臂作为主要承载部件会承受很大的复合外力,影响动臂的强度,甚至造成动臂变形。
因此挖掘机的使用期限和安全与动臂性能相联系。
本文通过有限元分析判断动臂是否安全可靠,进而寻找结构存在的不足或缺陷,进一步完善动臂结构,使动臂结构更加科学合理。
Abstract: When the excavator is working, as the main load-bearing components, the working arm will bear great composite external force, which affects the strength of the working arm, even causes deformation. So the service life and safety of the excavator is related to the performance of working arm. This paper through the finite element analysis to estimate whether a working arm is safe, and finds deficiencies and defects existing in the structure, further perfects the working arm structure, and makes the working arm structure is more scientific and reasonable.关键词:液压挖掘机;应力;应变Key words: hydraulic excavator;stress;strain中图分类号:TU621 文献标识码:A 文章编号:1006-4311(2013)18-0049-031 动臂结构在液压挖掘机的工作装置中,动臂是主要的承载部件,直接影响到挖掘机的使用寿命。
液压挖掘机动臂结构优化分析

6.动臂油缸座 7.加强贴板 8.后腹板 9.后支撑
图1 现有动臂结构图
应 力集中的手段 主 要 依 靠长期 积 累的 设 计 经 验, 面 对
以上设计的动臂结构在使用过程中出现两处开裂现
频繁承受交变载荷的复杂结构时难免存在判定失误的 象 :(1)折弯耳板与加强贴板之间焊缝开裂 ;(2)上盖
情况,而有限元法的出现,则可快速识别结构受力状况, 板与中腹板之间焊缝开裂。两处焊缝均出现在焊缝与母
(2)现有动臂结构抬升工况应力云图
(3)现有动臂结构回转工况应力云图 图5 现有动臂结构Mises应力云图
现有动臂结构有限元仿真的 Mises 应力结果如图 5 所示。在挖掘工况下,存在三处明显应力集中或应力较 大点 :耳板的折弯处、折弯耳板与贴板焊接处、上盖板
建立如图 4 所示有限元分析模型。为获取更精确 与中腹板焊接处。斗杆油缸力作用于耳板,本应将力快 计算结果,将整个工作装置均进行网格划分并提交有 速传递至上盖板,但耳板上有明显折弯,力传递不顺 限元仿真计算。网格划分时主要采用尺寸为 20mm 的四 畅,因而出现应力集中;折弯耳板力传递至上盖板边缘, 边形壳单元,板与板之间的焊缝连接采用网格节点重合 该处有上盖板与中腹板、贴板焊接,刚度较大,折弯耳 进行处理实现无缝对接,整体网格数量约为 30.41 万个。 板的刚度与该处刚度过渡不够平缓,导致应力集中。有
关键词 :液压挖掘机 动臂 有限元分析 疲劳寿命
以动臂、斗杆、铲斗以及驱动油缸等部件组成的工 位周边的应力分布情况,对其进行针对性优化设计,并
作装置是液压挖掘机的关键承结构件。作为液压挖 对优化后动臂结构的疲劳寿命进行评估。
掘机完成挖掘、回转、卸料等一系列动作的直接实施者,
工作装置在实际使用过程中,作业对象包含对土方、石 1 动臂结构开裂问题
液压起重机吊臂结构建模及有限元分析1

液压起重机吊臂结构建模及有限元分析1毕业设计(论文)开题报告学生姓名:专业:设计(论文)题目:指导教师:月学号:机械设计制造及其自动化液压起重机吊臂结构建模及有限元分析年日设计论()文题开报告1.结合毕业设(论计)课题情文,况据根所阅查的献文料资每,撰人写2 000字左的右文献述综文献综1述.课题背景1课.题背液压起重机景本文(指液压特用起重机) 船,船是的一上种大板机甲械,是它一船舶装卸货物的种设备,船舶是普遍上使用一种装的卸设备货。
臂在吊用船起机上是重最重要金属结构的部件也是,主要受构力,吊件臂的构设结计接决定着整个直重起机外观的和性能。
吊结构设臂的质量是计起机作重性能和安业全的证保,因此在吊设计臂时对吊臂进行受力算和结计分析构算计是分必要十。
的在起重吊臂机设的中计,其尤中吨小位吊臂设的计通,常用采传的统学方法力计,复算杂,投需较多的人入及力间,时计且精算较低度,算时仅计虑考个几危截面险的强度有一定的局限,。
因性本此文将入引以ASNSY软件为工具的有限元分析方法。
2.限有元分析 .2限元有析分.1 2. 1 发2展历史在02世纪40 代初年首次期提出。
1941年兰赫尼可夫A(.H enikorff)出用隔提栅的集体合表二示维与三的结构体维19。
34年库兰特R(.C oranut也)应了用单“元”法则的。
了到02 世纪0 5代年,由工于上程的需要特,别高是电速计子机算的现与应出,用限元法得以有迅速发展并得,愈来愈到泛的应广用。
916 0年拉克(夫R .. CWloguh)首先提“有出元限法” 。
年来,近计在机程序的算制方面编也有了非,大的常发。
展于有限元由法的用通性,已经成它解决各为种问题的强力和灵有活用的通具。
因工不少国家编制了大型通此的计算机程序用如,:AP、ADINA、SANSYS、BAAQS、UCSMOO S等。
2. 基本2思首先,将表示想构结的连续离体散若为个干子域(单) 元,单之间元通过其界边上的结点相接成连组体。
液压挖掘机伸缩臂CAD设计与有限元分析

液压挖掘机伸缩臂CAD设计与有限元分析作者:乔春蓉液压挖掘机是交通运输、能源开发以及城镇建设等各项工程建设的重要施工装备,它的使用也反映了这些部门的施工机械化水平。
因此,重视和加速挖掘机改进创新,稳定提高产品质量,满足用户需求,对加速现代化工程建设有着重大的意义。
在液压挖掘机的设计中反铲装置结构设计的合理性将直接影响到液压挖掘机的工作性能和可靠性。
因此现在面临的问题就是开发研究伸缩挖掘臂形式的新型液压挖掘机。
本文将挖掘机的斗杆设计为伸缩臂一斗杆结构,并对其进行受力分析和有限元分析。
1 SolidWorks在挖掘机设计中的应用在挖掘机工作装置设计中,最困难的工作就是运动机构的设计与运动轨迹校核,目前多采用轨迹图法或根据几何约束条件建立方程组进行求解,但对于运动部件多于三个的机构,设计起来就要麻烦得多,并且设计工作不直观,设计结果也不尽人意。
三维设计软件SoildWorks是集设计、运动轨迹校核及有限元分析于一体的强大应用软件,其建模速度快,直观,能充分显示出各部件运动中相互之间的协调关系。
2伸缩臂——斗杆设计2.1伸缩臂——斗杆结构伸缩臂与斗杆都采用由钢板焊接而成的箱型结构,内部安装有执行伸缩任务的油缸,油缸行程为1300mm。
伸缩臂与斗杆相对滑动,靠其中的支撑滑块来支撑并传递力的作用。
伸缩臂一斗杆简图见图1。
2. 2伸缩臂—斗杆受力分析反铲装置的伸缩臂与斗杆强度计算一般根据反铲工作中挖掘力对伸缩臂可能产生的最大弯矩来确定。
伸缩臂危险断面最大应力发生在采用转斗挖掘的工况下。
计算时,一般取两个位置。
计算位置I:①动臂位于最低;②斗杆液压缸作用力臂最大;③斗齿尖位于铲斗与伸缩臂铰点和斗杆与动臂铰点连线的延长线上;④侧齿有横向力。
取铲斗为隔离体,对铰点C(铲斗与伸缩臂铰点)写力矩平衡方程ΣMo= 0,求得:取工作装置为隔离体,对动臂底部铰点A写力矩平衡方程ΣMA = 0,求得:取伸缩臂为隔离体,对斗杆与动臂铰点B写力矩平衡方程ΣMB= 0,求得斗杆液压缸作用力:铲斗侧齿遇到障碍时,横向挖掘阻力Wk由回转机构的制动器承受,其值为:MT为回转平台制动器可承受的最大力矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
"""""""""""""""""""""""""""""""""#
关键词:动臂 有限元 静力分析
取得了良好的效果。
" 计算工况选择
分析与实验表明,危险断面最大应力发生在采 用铲斗挖掘的工况下, 因此计算位置按以下条件确定: ( 动臂位于动臂缸作用力臂最大处; !) 斗杆位于斗杆缸作用力臂最大处; ( ") ( 铲斗位于发挥最大挖掘力位置。 #) 按上述条件得到工作装置的计算位置如图 ! 所 示。 根据其 在计算工况中, 铲斗缸 !" 产生主动力, 最大推力可确定最大挖掘力 # $%&。
( #)
修改前的结构模型对比
另外, 在此计算模型中没有考虑焊缝的影响。 在 ( ") 实际情况中, 良好质量的焊缝能够减小应力集中, 即 实际结构中的最大应力应低于计算值。
参 考 文 献
’ &
曹善华 / 单斗挖掘机 / 北京: 机械工业出版社, ’:7:
— $& —
工程机械
!""! ( #$ )
!"#$%&’(%)"# *+(,)#-&. +#/ 01’)23-#% 4"5677 8"699
! "#$%&’$# () *)+,(#!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
*"/-5 :;9<=> ?’55 @./&+’5)( !&+A5-& :.2- B’55/"C-& !"#$%& ’()*+,& -.%%/ 01234.%56/ 6347%$3/ 819$/ :.%%2";$3/ 5</ 235=$>& 01#3"<8?856?%%1@& A8& 42"98<& B4>1& -"3$5C>& 42=4>6$2& 8$60D >"%"C5$<E& B45>& 9438<& 4>2& 6"B9">$>8<& 43$& -3"B& 4:3"42@& ,%%& 8048& $><.3$<& 58<& F.4%581/ 4>2/ 3$%54:5%581@/ G83.68.3$/ -$48.3$</ 4>2/ 9$3-"3B4>6$/ 9434B$8$3</ 43$/ %5<8$2/ 5>/ 80$/ 43856%$<@ D-.A"&/$:@./&"$%+%)( /&)E- !&+A5-& %.2- F’55/"C-& G%&’(%’&?)#)%- 05-3-#% >#+5.$)$ "# @./&+’5)( 0H(+E+%"&I$ B""3 G84856/ 4>4%1<5</ ">/ $H64=48"3I<& :""B& 7580& -5>58$& $%$B$>8& B$80"2& 5<& 2$<635:$2& 5>& 80$& 43856%$@& J0$& <$%$685">& "-& 7"3K& 6">2585"><E& <$885>C& "-& 3$<8345><& 4>2& %"42<E& B$80"2& "-& B$<05>C& 43$& 25<6.<<$2& 5>& 2$845%<E& 4>2& ">& 80$& :4<5<& "-& 80$& 4>4%1<5<E& :""B& <83.68.3$& 5<& 5B93"=$2@& G485<-468"31& 3$<.%8& 5<& ":845>$2@ D-.A"&/$J B""3 ?)#)%- -5-3-#% G%+%)( +#+5.$)$ K-%-&3)#+%)"# +#/ >#+5.$)$ "L !’%%-& M)%(, "# N"(O :’##-55-& J0$& 4334>C$B$>8& "-& 25<K& 6.88$3<& ">& 80$& 0"%2$3& "-& -.%%& <$6D 85">& 3"6K& 8.>>$%%$3& 5<& 80$& K$1& 8$60>5F.$& 5>& 80$& 2$<5C>& "-& -.%%& <$685">& 3"6K& 8.>>$%%$3@& J4K5>C& 80$& 4>4%1<5<& "-& 752$%1& .<$2& $D F.54%& 95860& 4334>C$B$>8& "-& 25<K& 6.88$3<& ">& 4& -%48& 0"%2$3& 4<& 4>& $H4B9%$E& 80$& 2$8$3B5>485">& 935>659%$& "-& 6.88$3& 95860$<E& 80$& 64%6.%485">& "-& 3"6K& 63.<05>C& ="%.B$& 4>2& 80$& "80$3& 93":%$B<& 43$& 25<6.<<$2@& A8& 5<& 5>& 80$& 0"9$& 8"& :$>$-58& 80$& 2$<5C>& "-& 2"D B$<856& -.%%& <$685">& 3"6K& 8.>>$%%$3& 4>2& 8.>>$%& 6"><83.685">& B4>4C$B$>8@ D-.A"&/$J ?’55 $-(%)"# &"(O %’##-55-& K)$O (’%%-& !’%%-& 2)%(, P2%)3+5 K-$)Q# "L G,"E-5 B’(O-% >%%+(,3-#% "# R6S37 @./&+’5)( 0H(+E+%"& J0$& "985B4%& 2$<5C>& "-& 6"BB">& <0"=$%& :.6K$8& 488460B$>8<& ">& %43C$& <5;$2& 01234.%56& $H64=48"3<& 5<& <8.25$2& 5>& 80$& 43856%$@& J0$& 2$8$3B5>485">& B$80"2& "-& 843C$8& -.>685">