基于Ansys+Workbench的起重机吊臂结构全伸臂工况的有限元分析
ANSYS分析塔式起重机吊臂步骤

ANSYS分析塔式起重机吊臂步骤塔式起重机吊臂是一种常见的起重机构。
它通常用于吊装重物,并且能够通过伸缩吊臂的长度来适应不同的工作条件。
利用ANSYS软件进行塔式起重机吊臂的分析可以帮助工程师了解吊臂结构的强度和刚度,并优化设计以满足设计要求。
下面是使用ANSYS软件进行塔式起重机吊臂分析的一般步骤:1.几何建模:首先,需要使用CAD软件或者ANSYS自带的几何建模工具创建塔式起重机吊臂的几何模型。
这个几何模型应该包括所有的主要结构组件,例如吊臂、支撑杆、立柱等。
2.材料定义和加载:在进行分析之前,需要对所使用的材料进行定义。
材料定义应包括材料的弹性模量、泊松比和密度等。
另外,还需要定义适当的加载条件,例如自重载荷、外部工况荷载等。
3.网格划分:对几何模型进行网格划分是进行分析的关键步骤。
足够准确的网格划分可以提供更精确的分析结果。
在划分网格之前,需要根据倾斜角度和吊臂的形状来确定合适的划分方式。
4.约束和边界条件:对于塔式起重机吊臂的分析,通常需要施加一些边界条件和约束。
例如,可以将塔座固定在地面上,使其不能发生任何位移。
此外,还可以施加其他约束条件来模拟实际工作条件。
5.应力分析:完成了网格划分和约束设置后,可以进行应力分析。
应力分析可以帮助工程师了解吊臂在不同工况下的应力分布情况。
可以通过绘制应力云图和边界应力图来可视化这些结果。
6.判断强度:针对应力分析的结果,可以对吊臂的强度进行评估。
可以检查吊臂是否满足强度设计要求,例如是否超过了材料的屈服强度或破坏强度。
7.刚度分析:除了强度外,刚度也是塔式起重机吊臂设计中的重要考虑因素。
可以通过刚度分析来评估吊臂在工作状态下的形变情况。
如果形变过大,可能会影响到起重机的操作性能。
8.优化设计:根据应力和刚度分析的结果,可以对塔式起重机吊臂的设计进行优化。
例如,可以增加材料厚度、增加支撑杆数量或改变结构形式等。
优化设计可以提高吊臂的强度和刚度,在满足设计要求的前提下减少结构重量。
基于Ansys Workbench的起重机吊臂结构全伸臂工况的有限元分析
基于Ansys Workbench的起重机吊臂结构全伸臂工况的有限元分析李春风;董庆华;李少杰;郝清龙;王宇飞;曹硕【摘要】通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的分析研究对于起重机的结构优化起到了大的作用.以50 t 起重机吊臂为例,借助软件Ansys Workbench对吊臂结构的全伸臂工况进行有限元分析,得到其变幅平面内各处位移和应力,为结构的改进和优化提供了一定的参考.【期刊名称】《承德石油高等专科学校学报》【年(卷),期】2016(018)002【总页数】5页(P17-21)【关键词】吊臂;Ansys Workbench;有限元【作者】李春风;董庆华;李少杰;郝清龙;王宇飞;曹硕【作者单位】承德石油高等专科学校工业技术中心,河北承德 067000;承德石油高等专科学校工业技术中心,河北承德 067000;承德石油高等专科学校工业技术中心,河北承德 067000;承德石油高等专科学校工业技术中心,河北承德 067000;承德石油高等专科学校工业技术中心,河北承德 067000;承德石油高等专科学校工业技术中心,河北承德 067000【正文语种】中文【中图分类】TH21通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的强度对于起重机承载最大起重量时的整机起重性能起到了决定性的作用,吊臂自重对于起重机整机倾覆稳定性有着最直接的影响,吊臂结构的设计将直接影响整个起重机的性能,所以对吊臂进行有限元分析是很有必要的。
1.1 吊臂工作原理起重机升降重物,是利用吊臂顶端的滑轮组支撑卷扬钢丝绳来悬挂重物,利用吊臂的长度和倾角的变化来改变工作半径和起升的高度,如图1所示。
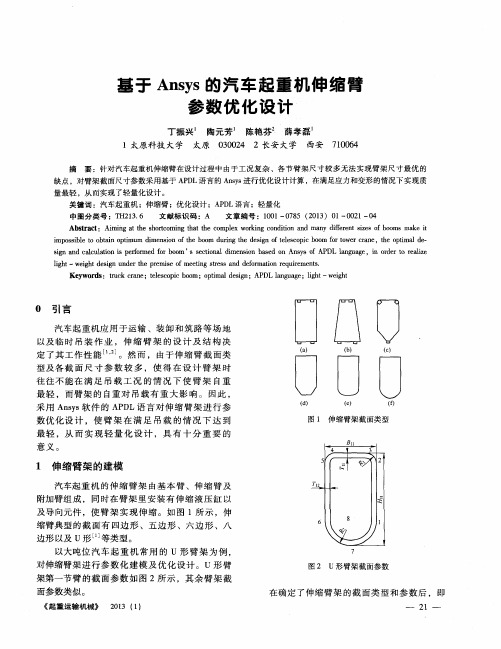
吊臂有两节、三节、四节、五节等不同形式,通过变幅机构来实现俯仰功能,如图2所示。
起重臂顶端可以加滑轮,实现吊钩单倍率工作,提高工作速度。
另外,起重臂顶端还可以同时加副臂,实现更大的起升高度。
汽车起重机伸缩臂结构有限元分析及优化

汽车起重机伸缩臂结构有限元分析及优化汽车起重机伸缩臂结构有限元分析及优化引言:汽车起重机作为一种重要的工程机械设备,在建筑、物流等行业中起着重要的作用。
而在汽车起重机的设计中,伸缩臂结构是其关键组成部分之一。
伸缩臂结构的合理设计和优化可以提高汽车起重机的工作效率和承载能力,降低其重量和成本。
因此,对汽车起重机伸缩臂结构进行有限元分析与优化具有重要的理论意义和实际应用价值。
1. 伸缩臂结构的设计和工作原理汽车起重机的伸缩臂结构由伸缩臂筒、伸缩臂滑块、伸缩臂大臂、伸缩臂小臂等组成。
其工作原理是通过液压系统控制伸缩臂筒的伸缩,从而实现伸缩臂的变化和起重高度的调节。
伸缩臂结构的设计直接影响汽车起重机的工作性能和稳定性。
2. 有限元分析的原理和方法有限元分析是一种数值分析方法,通过将结构离散化为有限个小元素,利用数学和力学原理对每个小元素进行计算,最后得到整个结构的应力、应变、位移等相关信息。
有限元分析方法可以精确计算伸缩臂结构在不同工况下的受力情况,为优化设计提供基础。
3. 初始结构的有限元分析首先,采用有限元分析方法对汽车起重机初始伸缩臂结构进行分析。
通过初始结构的有限元模型建立和边界条件的设定,计算得到伸缩臂结构在不同工况下的受力情况,包括应力、应变、变形等参数。
利用有限元分析结果,可以评估初始结构的工作性能,并确定需要改进的方向。
4. 结构优化设计与分析基于初始结构的有限元分析结果,可以进行伸缩臂结构的优化设计。
结构优化的目标是提高结构的工作效率和承载能力,降低结构的重量和成本。
通过在有限元模型中进行参数化设计和分析,可以获得不同设计方案下的结构性能指标。
综合考虑结构的强度、刚度、轻量化等因素,选择最优设计方案。
5. 优化设计的验证与验证对优化设计方案进行验证与评估是优化过程的重要环节。
通过将优化设计方案转化为实际工艺制造过程中的参数,并制作样件进行实际测试和评估,可以验证优化设计方案的有效性,并进一步优化设计方案。
基于ANSYS的挖掘机动臂吊具的有限元分析
( 卡特彼勒徐州有 限公 司, 江苏 徐州 2 10 ) 20 4
摘 要 : 臂 的 平 衡 吊具 受 力较 复杂 , 不 规 则 , 简化 成杆 或 者 粱的 模 型 计 算其 理 论 强度 和 实际 工 况 误 差 较 动 且 而
大, 文章 利 用有 限 元 通 用软 件 A YS 用 多栽 荷 步 的 方 法 校核 其 强度 。 NS 采
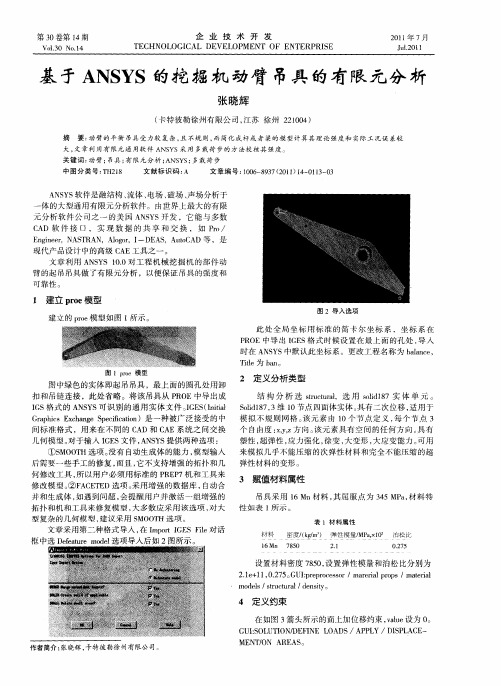
1 建立 po 模型 re
图 2 导 入 选 项
建立的 po 模 型如 图 1 r e 所示 。
此 处全 局坐标 用标 准 的笛 卡尔 坐标 系 .坐标 系在 PO R E中导 出 1 E G S格式时候设置在最上面的孑 处 , L 导入
时在 A S S中默认此坐标系。更改工程名称为 bl c , NY a ne a Tt 为 bn ie l a。
4 定义约束
在如图 3 头所示 的面上加位移约束 ,al设为 0 箭 vhe 。
G I O U I N D F N OA S/A P Y /DI P AC — U : L TO /E I E L D S P L SL E
MENT/ 0N A REAS
作者简介: 张晓辉 , 卡特彼勒徐 州有限公司。
第 3 卷第 1 期 O 4
V0 |O l3 No 1 .4
企 业 技 术 开 发
TECHNOLOGI CAL DEVELOPM ENT OF ENTERPRI SE
21 年 7 01 月
J 1 0 u. l 2 l
基于A Y NS S的挖 掘机 动臂 吊具 的 有限 元 分 析
堪 M l ¨ / x0 白 5 比
02 5 .7
设置材料 密度 7 5 , 80 设置弹性模量和泊松 比分别为
基于ANSYS Workbench的挖掘机动臂有限元分析
考依据。
关 键 词 :动 臂 ;S o lid w o r k s ;A N S Y S W o r k b e n c h ;静 力 学 分 析
中 图 分 类 号 :T Q 422. 2 文 献 标 识 码 : A
文 章 编 号 :1 0 0 7 6 9 2 1 ( 2 0 1 7 ) 0 6 0 0 8 5 01
备制造业中的应用。
• 85 •
黄 鹏 ,等 • 杨 家 坪 滑 坡 稳 定 性 研 究
2017年 第 6 期
表3
稳定性计算结果
工况组合 1 2 3 4
稳定性系数 1 2029 1 2154 1 0568 1 1838
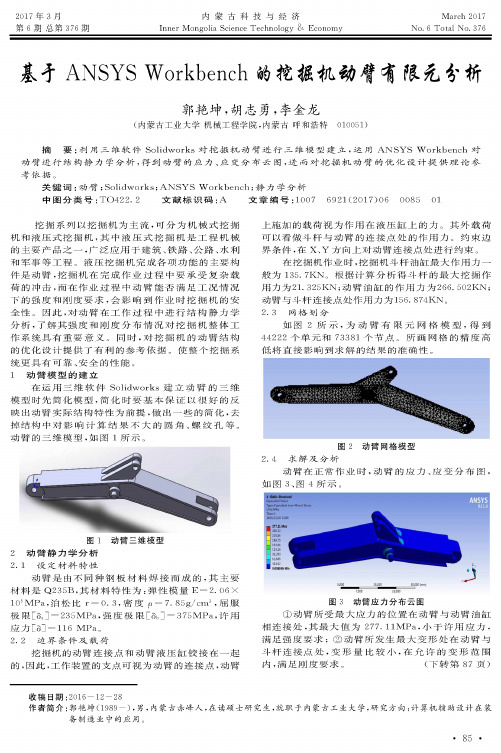
在 运 用 三 维 软 件 Solid w o rk s建 立 动 臂 的 三 维 模 型 时 先 简 化 模 型 ,简 化 时 要 基 本 保 证 以 很 好 的 反 映 出 动 臂 实 际 结 构 特 性 为 前 提 ,做 出 一 些 的 简 化 ,去 掉 结 构 中 对 影 响 计 算 结 果 不 大 的 圆 角 、螺 纹 孔 等 。 动 臂 的 三 维 模 型 ,如 图 1 所 示 。2
挖 掘 系 列 以 挖 掘 机 为 主 流 ,可 分 为 机 械 式 挖 掘 机 和 液 压 式 挖 掘 机 ,其 中 液 压 式 挖 掘 机 是 工 程 机 械 的 主 要 产 品 之 一 ,广 泛 应 用 于 建 筑 、铁 路 、公 路 、水 利 和 军 事 等 工 程 。液 压 挖 掘 机 完 成 各 项 功 能 的 主 要 构
如 图 2 所 示 ,为 动 臂 有 限 元 网 格 模 型 ,得 到 44222个 单 元 和 73381个 节 点 。所 画 网 格 的 精 度 高 低将直接影响到求解的结果的准确性。
汽车起重机吊臂的有限元分析
第27卷第3期 辽 宁 工 学 院 学 报 V ol.27,No.32007年 6 月 Journal of Liaoning Institute of Technology Jun.2007收稿日期:2006-11-08基金项目:辽宁省重大科技攻关项目(2006219008-4A ) 作者简介:杨 晶(1982-),女,山东沂水人,硕士生。
李卫民(1965-),男,辽宁朝阳人,教授,博士。
汽车起重机吊臂的有限元分析杨 晶1,李卫民1,刘玉浩2(1.辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001;2. 空军第三飞行学院, 辽宁 锦州 121000)摘 要:以ANSYS 软件为工具,详细介绍了汽车起重机吊臂的各个臂段在不同工况下的有限元分析过程,包括实体建模、网格划分、载荷和约束的处理;并对汽车起重机吊臂进行了优化设计。
得出的结论为汽车起重机吊臂的设计提供了可靠的依据。
关键词:吊臂;工况;有限元分析;优化设计中图分类号:TP391.72 文献标识码:B 文章编号:1005-1090(2007)03-0195-03Finite Element Analysis of Truck Crane BoomYANG Jing 1,LI Wei-min 1,LIU Yu-hao 2(1.Mechanical Engineering & Automation College, Liaoning University of Technology, Jinzhou 121001, China ;2.The 3rd Flight Institute of Airforce, Jinzhou 121000,China )Key words: boom; work condition; finite element analysis; optimal designAbstract: By means of ANSYS software, finite element analysis of every boom of truck crane under different work condition was described in detail. Its procedure was expatiated, which included solid modeling, meshing, applying loads ;optimal design of the boom was analyzed. Valuable conclusions in application were obtained, with a credible theory foundation for the design of the truck crane boom rendered.吊臂是汽车起重机的重要组成部分。
基于ANSYS的铁路起重机伸缩臂模态分析研究
图9 壁温历史数据
图10 特征值监控曲线
结果表明,在堵管情况,同屏管内的沿程阻力小
内圈管道)的管道流量增加幅度较大。
在管道堵管时,沿程壁温都会有不同程度的上升;设定监测单元,通过监测单元内的变化和正常值95%(或5%)分位数的数量
中国设备工程 2024.03(上)
图1 伸缩臂整体臂架有限元模型
整体伸缩臂臂架模态分析
有限元模态分析一般有两种方式:自由模态分析和约束模态分析,本文选择约束的方式对伸缩臂整体臂架进行模态分析。
在伸缩臂尾部与转台轴连接处和基本臂头部与变幅液压油缸的轴连接处施加约束,约束了三个方向上的平动自由度和两个方向上的转动自由度,仅释放伸缩臂沿连接轴的轴线方向上的转动自由度,从而更接近实际应用地模拟出伸缩臂的工作状态。
Workbench中Modal插件对伸缩臂整体臂架进行模态分析,通过分析得出伸缩臂整体臂架的前六阶固有频率和模态振型。
前六阶固有频率分别为
z、9.8977H z、13.673H z、17.
21.983Hz,模态振型图如图3~图8所示。
~图8可以看出:整体臂架的第一阶模态振型为整体臂架绕轴旋转弯曲;第二阶模态振型为整体臂架绕轴旋转弯曲;第三阶模态振型为整体臂架绕轴旋转,图2 伸缩臂有限元模型局部放大图
图3 整体臂架第一阶模态振型图
图4 整体臂架第二阶模态振型图
图5 整体臂架第三阶模态振型图
143
中国设备工程 2024.03(上)
图6 整体臂架第四阶模态振型图
图7 整体臂架第五阶模态振型图
图8 整体臂架第六阶模态振型图144中国设备工程 2024.03(上)。
基于ANSYS的塔式起重机臂架有限元参数化建模与分析

1
参数化
在进行系列产品设计 中, 由于其 结构形式 相
同, 而结构尺寸不同 , 如果逐个进行建模分析, 需 要花费大量的人力 和物力资源 , 造成设计周 期延 长。将参数化的思想引进到有限元的分析过程中 , 可以减少系列产品有限元分析的工作量 , 缩短设计 周期 , 提高设计效率。 参数化的概念涵盖很广, 通常指的是参数化的 造型 , 它是一种重要的几何参数快速构造和修改几 何模型的造型方法。参数化设计是实现设计自动化 的主要手段之一。参数化建模用于基本结构形状相 同但具体模型形状有较小变动的系列产品的设计。 根据如何得到参数值 , 可以将常见的参数化方法分 起重运输机械 2006 ( 9)
为如下几种 : 代数法、人工智能法、直接操作法和 语言描叙法。本文中有限元参数化模型的建立采用 的就是 ANSYS 的 APDL 语言描述法。
2
臂架结构参数化建模分析算例
采用交互式建立塔机的有限元模型, 建模的工
作量将十分巨大, 而且当臂架结构发生变化时 , 需 要重新建立模型。如果把结构模型都以参数化技术 进行有限元建模, 当需要新产品结构设计时, 只需 要输入必要的、合理的参数值, 即可自动建模。考 虑到塔机结构主要以型钢焊接结构为主, 结构具有 相似性, 为进行参数化建模分析提供了必要条件。 可以采用 VB、VC 等程序设计语言编制程序 , 用户 只要输入建立塔机结构所需的一些必要参数, 就可 以输出 ANSYS 参数化建模分析所需的参数化文件, 自动建立塔机有限元分析模型, 这样就可以减小模 型建立需要 的时间, 提 高工作效 率。利用 ANSYS 进行结构参数化建模与分析的基本流程见图 1。 2 1 臂架结构相关参数确定 塔机臂架形式多种多样 , 这里以最常见的正三 角形截面双吊点吊臂为例进行说明。要构建臂架的 有限元参数化模型 , 首先要确定与臂架相关的结构 参数, 主要包括以下数据: ( 1) 基本数据: 包括起 重量、小车轮距、臂架段数、臂架根部到回转中心 距离、小车及吊钩质量等。 ( 2) 臂架的基本数据: 包括臂架高 度、宽度、臂架 段数、每段长 度、节 11
基于ANSYSWorkbench汽车起重机副臂的性能分析
基于ANSYSWorkbench汽车起重机副臂的性能分析针对汽车起重机副臂长细比较大,在考虑自重、载重和拉力时,副臂结构易发生变形的这种情况,分别利用有限元分析软件ANSYS Workbench和力学计算方法对副臂进行位移及应力的计算,得到在不同工况下副臂所承受的最大位移和最大应力,为副臂机构的设计计算及以后的结构上的优化提供依据。
标签:副臂;ANSYS Workbench;变形;应力.引言随着现代化速度的不断增加,起重机械在生产生活中应用范围逐步增大,所起到的作用也日益增加。
又由于汽车起重机作业性能高、使用灵活、价格相对便宜的特点,使得其在工程施工和城市建设中扮演着重要的角色。
但是由于伸缩主臂结构布置紧凑,并且自身质量很大,而且回转工作时对机动性能有一定的要求,使得主臂的伸长范围受到一定的限制。
又由于起重机工作时要求幅度很大、扬程较高,副臂为了满足这些要求,渐渐成为主臂结构和性能的补充和延伸。
但是副臂工作时受力大、工作条件恶劣并且结构复杂,人们便提出其自身工作重量轻,工作可靠的要求,因此对副臂进行准确的结构分析也显得十分重要。
ANSYS Workbench是一款大型CAE分析软件和应用平台,它综合了建模工具、分析工具、优化分析等多种功能于一身,其中的概念建模使副臂这种悬臂梁结构创建与修改变得简便。
1 材料属性的建立副臂弦杆材料采用Q345B,屈服极限?滓s=345Mpa。
其安全系数n=1.34,弹性模量E=210000MPa,泊松比?滋=0.28,密度?籽=7.9g/cm3。
Q345B属于普通低合金钢,其塑形及焊接性能十分良好,并且有一定的强度,实用性能好而且价格也比较便宜,性价比较高,适用于副臂这种悬臂梁结构。
2 概念建模概念建模对于创建和修改线体或面体非常便利,并最终将这些体生成有限元中的梁模型或板壳模型,在Design Modeler 使用概念建模中对副臂的桁架结构进行建模时,系统将自动连接梁单元组成的桁架结构,和一般CAD 软件建立的三维模型相比更加适合桁架结构的有限元分析,并且还可以对模型尺寸进行随时的修改,计算结果也可以快速更新,也比普通的CAD 软件模型修改再导入计算的模式更加的方便快捷。
基于ANSYS WORKBENCH的六自由度机械臂有限元分析及结构优化

1 六 自由度机械臂有 限元分析
1 . 1 有限元模型的建立
臂构 件 较 多且 等 效 简化 后造 型 简单 , 因此 可 以选 用Me c h a n i c a l , 网格 大 小 为 2 0 , 自动 网格 划 分 ,如 图1 所 示 ,节 点数 量 为4 7 4 4 2 ,单 元数 为2 2 8 1 2 。后
下 点 :
行 的可 靠 性 ,需 要 对 其 进 行 机 械 结 构 分 析 。近 年
来 对 机 械 结 构 的 分 析 已 经 从 结 构 静 力 学 延 伸 到 了
动 力 特 性 领 域 ,特 别 是 对 振 动 分 析 的 模 态 仿 真 已
1 )简 化 各种 连 接 ,将 齿轮 啮 合 简化 为 轴 和孔
姜振 廷 ,郑忠 才 ,董 旭
J l ANG Zh e n . t i n g,ZHENG Z h o n g . c a i , DO NG Xu
( 山东建筑大学 ,济南 2 5 0 1 0 1 )
摘 要 : 六 自由度机械臂作为机器人的 主要执 行机构 ,其机械性能决定 了工作的可靠性 。论文针对机械 臂的整体结 构进行 静力学特性和 振动特 性研究 ,基于A N S Y S WO R K B E N C H 的有 限元分析功 能 ,得到 了静 力学仿真和 模态仿 真的结果 ,并对 结果进行 了分析 ,在此基础 上对机械 臂进行 了减重优化 ,通过模态分析 ,验证 了优 化结果的可靠性。 关键 词 :机械臂 ;有限元 ;A N S Y S WO R K B E N C H
限 元分 析 。
软 件 中完 成 材 料 属性 的加 载 ,接 触 面 的 约 束 , 网
格 的 划 分 。 其 中 机 械 臂 连 接 部 分 及 夹 持 手 材 料 为 不 锈钢 , 弹性 模 量 l 9 3 G P a ,泊 松 比0 . 3 1 , 密度 7 7 5 0 k g / m。 ,其 他 部 分 等效 为硬 铝 合 金 ,弹 性模 量 7 1 GP a ,泊松 比0 . 3 3 ,密度 2 7 7 0 k g / m 。接 触面 选用 Bo n d e d 和N o S e p a r a t i o n 两种 面约 束 定义 , 由于 机械
基于ANSYS的高空作业车臂架有限元分析
基于ANSYS的高空作业车臂架有限元分析发表时间:2017-10-23T12:14:26.840Z 来源:《电力设备》2017年第17期作者:张幸幸[导读] 摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
(徐州徐工环境技术有限公司江苏徐州 221135)摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
关键词:高空作业车;臂架;有限元高空作业车主要由底盘、副车架、转台、臂架系统、控制系统、工作平台组成。
其中,臂架是高空作业车最主要的关键部件之一,其安全性、可靠性和先进性是决定高空作业车核心竞争力的关键。
臂架作为将工作平台送至指定工作位置的主要部件,其可靠性对作业安全性的影响至关重要,因此,对臂架结构进行优化及提高可靠性的研究和攻关具有重要意义。
本文以30m高空作业车臂架为研究对象,充分利用有限元多种单元类型的特点,对臂架实现了建模,得到了臂架静态计算的变形与应力,为臂架结构优化及其可靠性的提升奠定了理论与实践数据相统一的基础。
1 臂架所受载荷的确定对于静强度分析,传统观点认为,臂架水平全伸时的工况是最危险工况,但是对于某些部件,从经验可以判断最大应力发生在其他作业工况。
为了更好的了解臂架的整体应力分布情况,对其各个作业工况都进行有限元计算是非常必要的。
作用在臂架上的载荷分为基本载荷和附加载荷,基本载荷是始终或经常作用在高空作业车臂架结构上的载荷,包括自重载荷、工作载荷;附加载荷是高空作业车在正常工作状态下,结构件所受的非经常性作用的载荷,包括风载荷和冲击载荷。
对于不同的载荷,在计算过程中需要乘上不同的载荷系数。
起重机吊臂结构有限元

起重机吊臂结构有限元【摘要】本文基于ANSYS软件对起重机吊臂结构有限元进行了阐述。
【关键词】起重机;吊臂;有限元一、前言随着我国起重机行业的不断壮大,起重机吊臂结构有限元的问题引起了人们的重视。
我国在此方面取得成绩的同时,也存在一些问题需要改进。
在科技不断发展的新时期,需要我们加强对起重机吊臂结构有限元的研究。
二、起重机吊臂结构有限元的概述吊臂在汽车起重机上是最重要的金属结构部件,也是主要受力构件,吊臂的结构设计直接决定着整个起重机的外观和性能。
吊臂结构设计的质量是起重机作业性能和安全的保证,因此在吊臂设计时对吊臂进行受力计算和结构分析计算是十分必要的。
纵观这几年的起重机吊臂的发展,从吊臂截面形式的变化,以及伸缩系统单缸插销装置伸缩形式的出现,都记录了起重机吊臂发展的历程.同时也是广大工程技术人员对吊臂不断改进创新的见证。
汽车起重机最主要的性能是用来起吊和转运货物的,因此汽车起重机的起重能力是汽车起重机的最主要性能,如何在保证吊臂不被破坏的基础上起吊更大的重量,那就要尽量优化吊臂结构,减轻吊臂的重量。
随着有限元分析技术的发展,这种技术也被应用在吊臂的结构设计上,像吊臂的结构强度分析,吊臂简体的稳定性分析等,有限元计算是一种仿真计算,这种计算的准确程度已得到了广泛的证明。
有限元分析方法的应用,不但准确,而且比传统的解析法计算有着更好的直观性,从而也为企业缩短了新产品的研发周期,增加了产品质量的可靠性,赢得了市场。
三、吊臂有限元模型的建立1、实体建模鉴于ANSYS软件实体造型的局限性和吊臂自身结构的复杂性,文中采用通用三维造型软件SolidWorks对吊臂进行实体建模,之后以Parasolid(x-t)格式将实体模型导人ANSYS进行有限元分析。
2、单元类型的选择基于软件对吊臂进行有限元分析的通常方法均是将吊臂结构视为线模型,后赋予梁单元属性进行强度和刚度等方面的有限元计算,但是梁单元是用线来代替三维实体结构,并不能反映结构几何上的细节,且伸缩式吊臂是由钢板焊接而成的箱型结构,应该选用二维板壳单元和三维实体单元混合分网,或全部选用三维实体单元划分网格。
基于ANSYS的挖掘机动臂吊具的有限元分析

基于ANSYS的挖掘机动臂吊具的有限元分析摘要:动臂的平衡吊具受力较复杂,且不规则,而简化成杆或者梁的模型计算其理论强度和实际工况误差较大,文章利用有限元通用软件ANSYS采用多载荷步的方法校核其强度。
关键词:动臂;吊具;有限元分析;ANSYS;多载荷步ANSYS软件是融结构、流体、电场、磁场、声场分析于一体的大型通用有限元分析软件。
由世界上最大的有限元分析软件公司之一的美国ANSYS开发,它能与多数CAD软件接口,实现数据的共享和交换,如Pro/Engineer, NASTRAN, Alogor, I-DEAS, AutoCAD等,是现代产品设计中的高级CAE工具之一。
文章利用ANSYS 10.0对工程机械挖掘机的部件动臂的起吊吊具做了有限元分析,以便保证吊具的强度和可靠性。
1建立proe模型建立的proe模型如图1所示。
图中绿色的实体即起吊吊具,最上面的圆孔处用卸扣和吊链连接,此处省略。
将该吊具从PROE中导出成IGS格式的ANSYS可识别的通用实体文件。
IGES (Initial Graphics Exchange Specification)是一种被广泛接受的中间标准格式,用来在不同的CAD和CAE系统之间交换几何模型。
对于输入IGES文件,ANSYS 提供两种选项:①SMOOTH选项。
没有自动生成体的能力,模型输入后需要一些手工的修复,而且,它不支持增强的拓扑和几何修改工具,所以用户必须用标准的PREP7机和工具来修改模型。
②FACETED选项。
采用增强的数据库,自动合并和生成体,如遇到问题,会提醒用户并激活一组增强的拓扑和机和工具来修复模型,大多数应采用该选项,对大型复杂的几何模型,建议采用SMOOTH选项。
文章采用第二种格式导入,在Import IGES File对话框中选Defeature model 选项导入后如2图所示。
此处全局坐标用标准的笛卡尔坐标系,坐标系在PROE中导出IGES格式时候设置在最上面的孔处,导入时在ANSYS中默认此坐标系。
基于ANSYS的全地面起重机吊臂有限元参数化建模与分析
察 吊臂工作时的危险区域 。整个分析过程方便 、易 操作 ,大大减 少 了设 计人 员 的工作 量 ,提高设 计 质
量 ,缩 短 了起 重机 的研 发周期 。
1 程序 简 介
程序内部框架如图1 所示 。LOADC E 件 AS 文
囤 , Mt ̄  ̄tt Yi Sb S 固 菇 : 盘 鼗 围Z B s R  ̄ J "
a l ss na y i ba e o ANSYS s d n
J ANG a —we I Zh o n, CHENG i Ka
本 文将 参数 化思想 引入 有限元 分析 过程 J ,
以ANS 的二 次 开 发 工 具 AP 语 言 为基 础 ,以 YS DL
便 于 分 析 观 察 的 E CL 件 ;S XE 文 OUC 文 件 夹 E 中存 放 ANS 建模 过 程 中生 成 的各 节 吊臂 的有 限 YS
同组合 方式以及不 同工况 时的有 限元参数化模型 Bln C rahb t 及 Z — UN.AT ak upt.a/ 2  ̄ BR B 为利 用DOS 批 。在 对 起重 机 建立与分析计算 。避免了大量重复工作 ,设计人员 处理 语 言 编写 的启 动 和调 用 程序 J
只需 在 吊臂结 构文本 中输 入各 节 吊臂 的结 构尺 寸 , 在工 况文 本 中输 入需 要分 析计算 的工况 ,该程 序就 能 自动进 行参 数化 建模 、分析 计算 ,最 后得 到相应
图1 程序 内部框架示意 图
[ 收稿 日期 ] 0 2 0 — 6 2 1— 3 2 [ 通讯地 址 ]姜兆 文 ,吉林省长 春市人 民大街5 8 号 吉林 98
大学南岭校 区机械材 料馆7 9 4 室
C N T U TO C IE Y 2 1 89 O S R C INMA HN R 0 7 2
基于ANSYS高空作业车吊臂结构的有限元分析
内容摘要城市化建设的飞速发展,城市的高层建筑群越来越多,对适合于此类建筑物施工的高空作业车设备需求量与日俱增。
作业臂是高空作业平台的重要承载部件之一,也是整机结构强度相对薄弱的部分,其力学性能对机械的正常运转有直接影响,为了保证工作人员高空作业时的人身安全,其作业臂有着严格的设计要求。
针对此问题,在对其结构进行详细分析的基础上,可以利用ANSYS软件与CAD软件的数据交换功能,将AutoCAD软件中建立的作业臂的三维几何模型导入ANSYS中, 选择solid92实体单元,利用ANSYS强大的网格划分功能,分析作业臂的结构和受载特点,建立有限元模型进行作业臂结构的强度和刚度分析,确定危险截面或危险点得应力分布及变形,找出结构设计中的不合理因素,对作业臂模型的截面尺寸形式进行了合理的优化设计,以达到节约材料,节省成本,并保证作业臂的安全系数。
关键词: 高空作业车作业臂有限元分析截面ANSYSAbstractWith the rapid development of urbanization, The urban architecture is to be more and more, which demand more and more the appropriate equipment for the construction of such buildings. Telescopic boom is one of an important bearing component in Aerial Work Platform, and also is relatively weak machine parts, whose mechanical properties has a direct impact on the normal operation of the machine. It is necessary and important to research the mechanical properties of the working arm in the design field of aerial working platform for ensuring the person safety in aerial working.In this situation, based on the detailed analysis of working arm structure, and then the 3D geometry model has been made in the platform of AutoCAD, the model was imported into the ANSYS. Making use of the solid element solid92 and powerful gridding partition ability of ANSYS and then using the function to analyze the structure of the working arm and the load characteristics of the operating arm. To establish the finite element model of the structure is to analyze strength and stiffness, which will determine the dangerous section or dangerous point and deformation to identify the unreasonable factors of the structural design. The overall performance will be improved. The plate thickness is optimized to reduce the material and the cost and to ensure the safety factor of the operating arm.Key words: Aerial working platform Working arm Finite analysis Section Ansys第1章绪论1.1课题的研究背景与意义工程机械广泛应用于经济建设的各部门,在整个经济发展中占有十分重要的地位。
ansys分析报告平头式塔机起重臂

平头式塔式起重机起重臂的有限元分析一、实验目的:综合训练和培养学生利用有限元技术进行机械系统分析和设计的能力,独立解决本专业方向实际问题的能力;训练学生对机械结构问题分析规划的能力,能正确利用有限元分析软件ANSYS建立结构的有限元模型,合理定义单元、分析系统约束环境,正确加载求解,能够提取系统分析结果。
通过实验分析使学生了解和掌握有限元技术辅助机械系统设计和分析的特点,推动学生进行创新设计,进一步提高动手操作能力,为将来所从事的机械设计打下坚实的基础。
二、实验任务:本专题实验借用上一学期现代机械工程基础实验1-金属结构部分的参数和设计成果,采用有限元方法进行设计分析,用ANSYS软件对塔机的起重臂、平衡臂和塔身结构进行模型构建和强度、刚度分析,并与手工计算结果进行对比讨论。
掌握有限元法进行工程实例计算的基本方法和步骤。
三、实验内容和步骤:(一)问题分析:塔机工作时产生的冲击和振动易造成钢结构的破坏,起重臂作为塔机的主要受力部件,其结构强度和刚度关系着工作的可靠性和安全性。
利用有限元分析软件ANSYS 分析起重机臂架在典型工况下的应力分布规律及模态特性,可在虚拟阶段对其进行强度及稳定性校核,降低了生产成本,缩短了开发周期,提高了产品质量,本次实验周对平头塔机起重臂进行分析。
塔机起重臂主要载荷包括:起重臂自重、风载荷、吊重、吊重风载、惯性力或其他水平力。
臂架自重:参考同类型产品结构按比例初步估计为4T小车及吊钩:重量初步估计为0.625T风载荷:按照塔式起重机设计规范F w=C w P w AC w为风力系数,臂架为三角形结构,查表得C w=1.3P w为计算风压,工作状态取Pw=250MPA为迎风面积A=A1+ηA2A1—前片结构迎风面积A2--后片结构迎风面积A1=w1×A l1w1为结构充实率对于桁架取0.4A2=w2×A l2w2为结构充实率对于桁架取0.4 根据前后片外形轮廓尺寸计算出前后片迎风面积η—前片对后片的挡风折减系数,根据前片充实率及桁架隔比查表定位0.28计算可得:A=30.72㎡F w=9984N其他水平力:回转惯性力T=0.1×Q(Q为吊重)T=0.1×34.54KN=3.454KN起重臂根据上学期金属结构课程设计得,截面呈三角形结构上主肢采用∅121×32(外径121mm壁厚32m),下主肢采用两根18b扣方。
基于Ansys的汽车起重机伸缩臂参数优化设计
型 及 各 截 面 尺 寸 参 数 较 多 ,使 得 在 设 计 臂 架 时 往 往 不 能 在 满 足 吊 载 工 况 的 情 况 下 使 臂 架 自重 最 轻 ,而 臂 架 的 自重 对 吊载 有 重 大 影 响 。 因 此 ,
解 决 滑 块 与臂 架 之 间 的 接 触 问题 。采 用 A n s y s的
接 触 单 元可 以很 好 的实 现 ,但 因模 型规 模 大 ,且 接 触 问 题属 于 非线 性 问题 ,求 解 时 的反 复 迭 代 计
Ke y wo r d s :t r u c k c r a n e ;t e l e s c o p i c b o o m ;o p t i ma l d e s i g n;AP DL l a n g u a g e;l i g h t —w e i g h t
0 引 言
缺点 ,对 臂架截面尺寸参数采用基 于 A P D L语 言的 A n s y s 进行优化设计 计算 ,在满足应力 和变形的情况下实现质
量最 轻 ,从而实现 了轻量化设计 。 关键词 :汽车起重机 ;伸缩臂 ;优化设计 ;A P D L语 言 ;轻量化
中图 分 类 号 :T H 2 1 3 . 6 文 献 标 识 码 :A 文 章 编 号 :1 0 0 1— 0 7 8 5( 2 0 1 3 )0 1 — 0 0 2 1— 0 4
基 于 An s y s的汽 车 起 重 机 伸 缩 臂 参 数 优 化 设 计
浅析起重机吊臂结构的有限元分析与优化
浅析起重机吊臂结构的有限元分析与优化摘要:以起重机吊臂为分析对象,采用CERO软件建模,以有限元分析软件ANSYSWorkbench为平台,在各种典型的工作条件下对起重机臂进行有限元分析,并利用ansys软件对基础臂的截面参数进行优化。
将目标函数设置为起重机臂的重量,并对其进行优化,以满足强度和刚度作为约束的要求。
计算最合理的结构以节约成本。
关键词:CERO 软件建模 ANSYS Workbench 有限元分析结构优化引言:随着我国起重机行业的不断壮大,起重机吊臂结构有限元的问题引起了人们的重视。
市场反馈的信息及客户需求,制定了 2013—2014 年度随车起重机吊臂结构优化设计指标及措施:1.吊臂采用HG70高强度结构钢,强度提高10%。
相比HG60钢重量降低6%。
2.吊臂最大工作幅度同比国内同型号产品增加8%,10 t机型基本臂达到4500 mm,工作范围增加 8%。
3.吊臂优化设计,筒体焊缝减少到道焊缝,焊缝长度降低到同类型号的1/4 ~ 1 /2(其他机型有的多达8条焊缝,对焊接要求很高),且大大减少焊后校正的工作量。
4.吊臂增加了滑块接触点与接触面积,提高了吊臂的可靠性。
采用4点支撑,加大滑块面积。
5.吊臂内置伸缩机构,设计上采用了具有部分带载伸缩的结构,整个吊臂整洁美观,保护伸缩机构效果好,内部采用全钢滑轮及重载轴承,且具有一定的带载伸缩能力。
吊臂的结构形式主要由吊臂本体结构:即各吊臂的截面形状,吊臂工作长度,加强结构,伸缩机构设计决定。
对吊臂本体结构和伸缩机构进行了优化设计。
1 吊臂本体结构设计吊臂大都采用以高强度钢板为主的箱形截面,国内起重机吊臂的截面形式主要有四边形、五边形、六边形、八边形等,而中小吨位的起重机吊臂截面形式以五边形居多。
国外的起重机发展时间较长,吊臂的截面形式主要是优化设计过的圆角化多边形、椭圆形、U 形等,如德国和意大利的起重机吊臂截面主要以椭圆形居多,而国内只有徐工的大型全路面起重机才使用这样的截面形式。
基于Ansys workbench的鞍座举升摇臂有限元分析及结构优化
基于Ansys workbench的鞍座举升摇臂有限元分析及结构优化摘要:本文主要通过使用Ansys Workbench对鞍座举升摇臂进行有限元分析和结构优化来探究其在使用过程中的可靠性和稳定性。
文章首先对鞍座举升摇臂进行了三维建模,并对鞍座举升摇臂进行了应力、变形、疲劳寿命等方面的有限元分析。
然后,在结合优化设计的原则下,对鞍座举升摇臂的结构进行了优化,使其在保证强度、刚度和减小重量的前提下,达到更好的性能表现。
最后,本文通过实验验证和演示,证明了优化后的鞍座举升摇臂拥有更好的可靠性和稳定性,可以满足其设计和使用的要求。
关键词:Ansys Workbench、鞍座举升摇臂、有限元分析、结构优化、可靠性、稳定性。
正文:1.引言随着工业生产的不断发展,越来越多的机械设备需要承受更高的工作负荷和更复杂的工况环境,这就要求设备在设计过程中需要考虑更多的因素,如强度、刚度、稳定性等。
其中,有限元分析和结构优化技术的出现和发展,为机械设计师提供了更好的工具和手段。
本文主要针对鞍座举升摇臂进行有限元分析和结构优化研究,旨在探究其在使用过程中的可靠性和稳定性。
本文首先对鞍座举升摇臂进行了三维建模和有限元分析,并结合优化设计的原则进行了结构优化,最后通过实验验证,证明了优化后的鞍座举升摇臂拥有更好的性能表现。
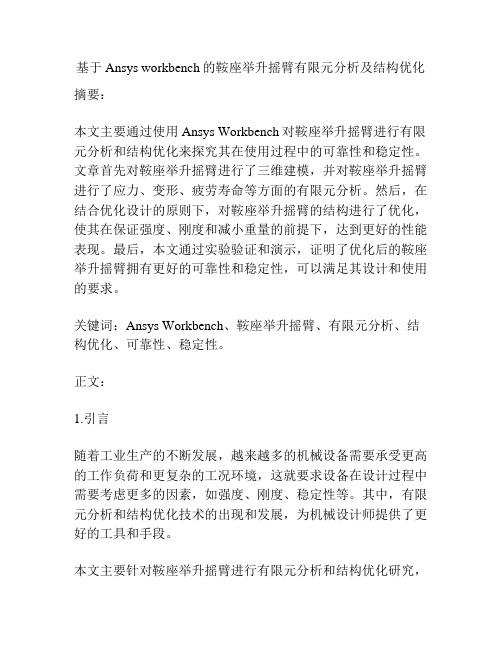
2.鞍座举升摇臂的三维建模与有限元分析鞍座举升摇臂是一种常见的机械设备,其主要作用是用于支撑举升机构的作用力,以保证机构平稳工作。
本文使用Ansys Workbench软件对鞍座举升摇臂进行三维建模,并对其进行了应力、变形、疲劳寿命等方面的有限元分析。
具体步骤如下:- 鞍座举升摇臂的三维建模。
通过使用Ansys Workbench软件,使用三维建模工具对鞍座举升摇臂进行建模,得到了鞍座举升摇臂的三维模型。
- 分析鞍座举升摇臂的应力、变形等情况。
在完成建模后,使用Ansys Workbench软件对鞍座举升摇臂进行应力、变形分析,根据分析结果,得到了鞍座举升摇臂在工作负荷下的应力、变形情况。
基于Ansys_Workbench_的平头塔式起重机臂架结构优化分析

基于Ansys Workbench的平头塔式起重机臂架结构优化分析黄江涛 高崇仁 王国涛 田星宇 周芳宇太原科技大学 太原 030024摘要:由于臂架是平头塔式起重机质量占比较大的结构,对整机的性能影响至关重要,故对臂架结构进行优化设计可大大提高整机的工作性能。
为此,文中采用许用应力法完成对平头塔式起重机臂架结构的初步设计计算,并对整机工作环境进行分析,了解起重臂架的工况,并使用Ansys Workbench软件对臂架进行静力学分析,以通过求解得到的应力云图和形变云图验证臂架结构设计计算的强度和刚度。
另外,对起重臂架进行模态分析,获取结构自身前六阶的固有频率和振型,为结的故障诊断和预警提供了可靠的理论依据。
在保证结构强度和刚度的前提下,通过对起重臂架各弦杆截面进行优化,从而降低臂架自重,提升材料的利用率,为起重臂架的轻量化设计提供参考思路。
关键词:平头塔式起重机;臂架结构;有限元;优化分析;模型中图分类号:TH.213.3 文献标识码:A 文章编号:1001-0785(2023)16-0037-06Abstract: Boom occupies a large proportion in the mass of flat-top tower crane, which has a great influence on the performance of the whole machine. Therefore, the optimization design of boom structure can greatly improve the performance of the whole machine. Therefore, the authors completed the preliminary design and calculation of the boom structure of the flat-top tower crane by using the allowable stress method, and analyzed the working environment in order to understand the working conditions of the boom. The static analysis of the boom was carried out by Ansys Workbench software, and the strength and stiffness in the design and calculation of the boom structure were verified by the stress nephogram and deformation nephogram obtained by solving. In addition, the modal analysis of the boom was carried out in order to obtain the first six natural frequencies and vibration modes, which provides a reliable theoretical basis for fault diagnosis and early warning. Under the condition of ensuring the structural strength and stiffness, the cross section of each chord of the boom is optimized, so as to reduce the self-weight of the boom and improve the utilization rate of materials, which provides a reference for the lightweight design of the boom.Keywords:flat-top tower crane;boom structure;finite element method;optimization analysis;model0 引言近年来,随着国家绿色发展政策的推进和回收体系的完善,作为占比20%的再生资源废纸的回收量持续增长,使纸品公司对存储环境的空间利用率提出了更高要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全伸臂工况的有限元分析
李春风,董庆华,李少杰,郝清龙 ,王宇飞,曹
(承德石油高等专科学校工业技术中心,河北
硕
承德067000)
摘要:通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的 分析研究对于起重机的结构优化起到了大的作用。以50 t起重机吊臂为例,借助软件Ansy。w。,kbench对吊 臂结构的全伸臂工况进行有限元分析,得到其变幅平面内各处位移和应力,为结构的改进和优化提供了一定
的参考。
关键词:吊臂;Ansys Workbench;有限元
中图分类号:TH21 文献标识码:A 文章编号:1008.9446(2016)02-0017-05
Finite Element Analysis of Crane Boom Device in Full Arm Condition Based
吊臂工作原理、结构尺寸及其受力分析
1.1吊臂工作原理 起重机升降重物,是利用吊臂顶端的滑轮组支撑卷扬钢丝绳来悬挂重物,利用吊臂的长度和倾角的 变化来改变工作半径和起升的高度,如图1所示。吊臂有两节、三节、四节、五节等不同形式,通过变幅
机构来实现俯仰功能,如图2所示。起重臂顶端可以加滑轮,实现吊钩单倍率工作,提高工作速度。另
位移。 2.3后处理
Ansys
Workbench的后处理中Geometry按钮控制云图的显示方法,共有四个可用选项:Exterior是默
认的显示方式并且是常用的方式,IsoSuffaces对于显示相同的值域是非常有用的,Capped IsoSurfaces是 指删除了模型的一部分后的显示结果,删除的部分是可变的,高于或者低于某个指定值的部分被删除,
uY、Uz
3个方向平移自由度进行约束,释放绕销轴中心回转的转动自由度ROTX。同时为保证臂的刚
度和强度,设定应力Stressm和位移Deflm为状态变量,通过控制应力和位移来保证臂满足刚度和强度 要求。 约束条件包括强度条件和刚度条件,强度条件为盯≤[盯],式中or为危险点最大应力;[or]为材料
许用应力;刚度条件为DEFLM<。[f],式中DE儿w一变幅平面内最大位移;[门一变幅平面内允许最大
a
reference for subsequent structure developing and optimization.
Key words:boom;Ansys Workbench;finite element
通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂 的强度对于起重机承载最大起重量时的整机起重性能起到了决定性的作用,吊臂自重对于起重机整机 倾覆稳定性有着最直接的影响,吊臂结构的设计将直接影响整个起重机的性能,所以对吊臂进行有限元 分析是很有必要的。
x
m,
480、385×540、420×600、
455×660(mm);起重举升臂的主体材料为合金结构钢,适当的选取16Mn进行加固,截面形状采用如 图4所示的“U”型截面。
吲f一,
u
一tI
U
—
◆
’、—J
j 一
.审l
r】■■■■■■-r一
.1’・o叫■・_o’II
L一…一~了
图3吊臂结构图
…一
图4吊臂截面图
外,起重臂顶端还可以同时加副臂,实现更大的起升高度。
收稿日期:2015.10—28
作者简介:李春风(1981一),男,河北石家庄人,承德石油高等专科学校工业技术中心讲师,硕士,主要从事机械设 计、有限元、可靠性等方面研究。
万方数据
承德石油高等专科学校学报
2016年第18卷
第2期
图1起重机示意图
图2吊臂示意图
Slice
Planes允许用户去真实的去切模型。本文采用第一个选项。得到后处理云图结果:如图5所示的
LI Chun-feng,DONG HAO
on
ANSYS
Workbench
Qing—hua,LI Shao-jie,
Yu—fei,CAO Shuo
Qing—long,WANG
(Industrial
Technology Center,Chengde Petroleum College,Chengde 067000,Hebei,China)
万方数据
・20・
承德石油高等专科学校学报
2016年第18卷第2期
结构特征的情况下,不在模型中建立吊臂的伸缩机构H1。由于各节臂的筒体是由薄板构成的,因此建模 时取中面尺寸进行造型,而基本臂的尾部及四节臂的头部结构复杂且刚性大,故建模时将其简化成了实 体。利用ANSYS Workbench强大的造型功能,建立了吊臂简化结构的几何模型。 2.1.2各节臂与滑块间的连接简化 吊臂共有四节,各节臂相互之间可以滑动,每节之间有3个滑块,通过各节臂搭接处滑块的接触和 挤压来实现力的传递。有两个思路,可以实现建模。思路1是建立接触单元,思路2是利用节点处的自 由度耦合来实现,本文采用后者。添加约束使得吊臂和各个滑块之间保持接触,沿着接触面可以相对滑 动,相应的节点(Coincident Node)间沿着接触面的法线方向自由度是耦合的,切线方向自由度是释放 的。利用各节臂和相应的滑块在同一个节点位置的耦合,实现滑块和吊臂对应各个节点的耦合模拟。 2.1.3单元选取和网格划分 输入材料属性:查阅机械设计手册,选取相应的材料系数为:弹性模量E=2×105 MPa,泊松比肛= 0.3,密度p=7
Abstract:As the main load bearing component of the crane,boom is used chieve great height and range operations.A research
structure
on
to
elevate load.and
boom device in full arm condition is researched.and the displace.
ment and stress in different positions in the variable amplitude plane is obtained,which will provide
T.=Tcos/3
(2)
在旋转平面,伸缩臂的侧向载荷为货物的偏摆载荷,侧向力Is,如公式(3)所示: Sy=(Qo+Go)gtgcY 其中a为旋转平面摆角。 没有安装副臂时,力矩M“=0,此时侧向力S,中的货物偏摆载荷S作用于臂端定滑轮的轴心处,吊 臂受到扭矩肘。作用,如公式(4)所示: MⅣ=(Qo+Go)geltga 带入实际工况数据,得到吊臂受力汇总见表1。
1.2吊臂结构尺寸 本文涉及到起重机基本参数为:回转速度:2 r/min,行走速度:70 km/h,最大起重量50 t,最大起重 力矩721.3 kNm,最大起升高度38.5 m,基本臂(第1节臂)举升高度为10.4 m;举升臂的总长为38 基本臂长10.2 m。举升臂为四节,结构见图3,四节的尺寸依次为:350
to
a.
boom plays
an
important role in bettering the
of
a
crane.Taking the 50
crane
ton
crane
boom for example,with the help of Ansvs Workbench.
finite element analysis of
850
kg/m3。根据材料系数定义相应的材料参数。
实体选用8节点的6面体单元Solid45,板采用Shell63板壳单元。Shell63为4节点的线弹性单元, 遵循基尔霍夫假设,即变形前垂直中面的法线且变形后仍然与中面相垂直,且该单元能够同时考虑中面 内的膜力以及弯曲变形,与吊臂的实际受载情况比较符合。 进行网格划分时,对吊臂的各个节臂筒体采用映射(mapped)和自由(free)的方式;滑块处为保证其 形状为六面体,本文采用扫掠(sweep)的方式进行划分。整个网格的划分,为避免形状畸形,应保证控制 单元形状尽可能规则。 由于每个节臂之间都有搭接部分,而且大部分节臂的板厚都不一样,不易选中,若是每块板逐个进 行网格划分,不仅效率低下,计算繁琐,而且很容易出现错误,为此在建模前应先在实体模型上指定对应 的属性,即将需要划分的单元、材料特性、实常数等赋予所有的实体,然后再对所有块、板等单元进行网 格划分,最终得到吊臂所对应的有限元模型。 2.2边界条件 2.2.1施加载荷 吊臂所受的载荷包括侧载、吊重、钢丝绳在臂头的拉力;风载、液压缸的作用力以及伸缩机构钢丝绳 的拉力。其中风载载荷作用在吊臂侧面上,而其它的载荷则需要加到各载荷相应位置的节点上或关键 点上,为了使这些载荷加载点能成为节点,需在相应节点的位置处创建硬点(Hard points)。此外,由于 钢丝绳在臂头的拉力及伸缩机构钢丝绳拉力的方向与整体坐标系方向不一致,为了便于加载荷,在建模 时还需要旋转这些节的点坐标系。 2.2.2施加约束 在基本臂尾部与转台铰接处,变幅液压缸铰点处,对ROTY、ROTZ 2个方向的转动自由度和UX、
咒=Tsi邶;将垂直载荷Q分解,垂直于吊臂轴线方向的分力为Q。=Qcos卢,平行于吊臂轴线方向的分力
为R=Qsirq3。其中J|B为伸缩臂在变幅平面倾角,Q为由起升载荷以及吊臂重量引起的垂直载荷。 伸缩臂有两个支点,分别是臂根车架之间的铰接点以及吊臂与变幅油缸之间的铰接点,因此可把吊
万方数据
李春风,等:基于Ansys Workbench的起重机吊臂结构全伸臂工况的有限元分析
表1 吊臂受力汇总
(3)
(4)
2
应用Ansys Workbench对吊臂结构进行有限元分析