雷达笔记
雷达原理笔记之雷达方程推导

参数符号雷达发射机的发射功率为P t 目标距离R目标的雷达截面积发射天线增益G t 接收天线增益G r 天线的有效接受面积A e 电磁波波长接收机最小可检测功率S imin 雷达原理笔记之雷达方程的推导H1雷达作用距离跟雷达方程的各个参数关系紧密。
雷达作用距离的改善往往需要利用雷达方程的各项影响参数进行改善。
1,基本方程H2参数列表:公式推导:首先假设,发射天线为无方向性天线,即各向同性。
那么空间中任何一点的电磁波功率密度为:然后加上天线增益系数G t :空间中,被目标截获并产生二次辐射的电磁波功率:被目标二次辐射到空间的电磁波功率密度:目标二次辐射的电磁波功率,被雷达接收天线截获得到的功率:雷达接收机能检测的回波信号最小功率为S min ,因此应满足的不等式:解不等式得到:进而,最大作用距离R max :参数符号玻尔兹曼常数k 接收机噪声带宽B n /B s 环境温度(噪声温度)T 0接收机噪声系数F 0检测因子(未相参积累)D 0信号处理增益G sp 损耗衰减因子L 相参积累脉冲个数N脉冲宽度脉冲雷达发射期间的平均功率P t 信号积累有效总时宽T s 对于脉冲体制雷达,常用收发共用天线,则G t =R r ,可得R max 的其他两种形式:2,雷达方程的其他形式H22.1考虑相参积累增益H3将S imin =kT 0B n F 0D 0代入雷达基本方程,得到:s信号处理后:D 0=D 0/G sp ,信号处理后:2.2考虑各种损耗H32.3用信号能量表示的形式H3根据,得到:,式14可化简为:,最终得到能量形式的R max表达式:2.4脉冲体制雷达的雷达方程H33,雷达方程对设计的指导意义H2根据不同情况下对应的雷达方程的具体形式,可以对雷达的设计提供指导性的方案。
1. 提高接收机灵敏度2. 降低损耗3. 增大信号能量4. 降低噪声系数5. 提高天线增益6. …………。
四年级语文上册26课笔记

四年级语文上册26课笔记以下是四年级语文上册26课的笔记,供您参考:1. 课文主题:《夜间飞行的秘密》是一篇科普小品文。
文章通过实验的方式,介绍了荧光小虫在夜间飞行时会发光的原因,以及人类如何利用这种生物特性制造出雷达,让它在夜间也能探测障碍物。
2. 生字生词:重点生字:启、即、碍、蝙蝠、荧、莹、啄、漆、锐、铛、屡、规、碍。
重点词语:雷达、无线电波、荧光屏、障碍物。
3. 句子解析:(1)“蝙蝠是在夜里飞行的,即使一根极细的电线,它也能灵巧地避开。
”这句话运用了拟人的修辞手法,将蝙蝠人格化,表现出蝙蝠飞行时动作敏捷、反应迅速的特点。
(2)“难道它的眼睛特别敏锐吗?科学家试验证明:蝙蝠的眼睛视力并不好,全靠它发出和接收超声波来辨认方向。
”这句话运用了设问的修辞手法,先提出问题“难道它的眼睛特别敏锐吗?”,然后通过科学家的试验来回答问题,说明蝙蝠是靠发出和接收超声波来辨认方向的。
(3)“荧光屏上就会出现一个亮点,像一只闪着绿光的小球。
”这句话运用了比喻的修辞手法,将荧光屏上的亮点比喻成一只闪着绿光的小球,形象地表现出雷达发出的无线电波反射回来的情况。
4. 段落分析:本文共有8个自然段,可以分为三个部分。
第一部分(第1自然段):介绍蝙蝠在夜间飞行时能够灵巧地避开障碍物的特点。
第二部分(第2-6自然段):通过科学家的试验,说明蝙蝠是靠发出和接收超声波来辨认方向的。
第三部分(第7-8自然段):介绍人类利用雷达的原理,在夜间也能探测障碍物。
5. 中心思想:本文通过实验的方式,介绍了荧光小虫在夜间飞行时会发光的原因,以及人类如何利用这种生物特性制造出雷达,让它在夜间也能探测障碍物。
文章旨在激发读者对科学的好奇心和探索精神。
雷达原理笔记之恒虚警概率检测

雷达原理笔记——恒虚警概率检测H1恒虚警概率检测技术是雷达设计过程中经常涉及到的问题。
由于噪声的存在,雷达在探测目标时不可避免地会出现虚警情况。
而这种虚警概率的高低则是反应雷达探测性能的重要指标。
“恒虚警检测”顾名思义就是在保证虚警概率一定的情况下,尽可能高的提高发现概率。
上图是,雷达设计过程经常用到的一个概率分布图。
一般来说,噪声都是服从0均值的高斯分布,其包络服从瑞利分布。
目标和噪声的包络服从莱斯分布(Rice分布)或者广义瑞利分布。
横坐标是对噪声电平归一化的回波信号电平(目标和噪声的包络电压)。
图中与纵坐标平行的虚线是雷达接收机的信号检测门限值,高于门限电平接收机认为接收到的是目标信号,判为有目标存在。
因此在图中可以直观看到,在虚线右边,信号和噪声的包络电压概率分布曲线和横坐标轴所围成的面积是对应的发现概率;而在虚线右边,噪声的包络电压概率分布曲线和横坐标轴所围成的面积是对应的虚警概率。
因此,提高检测门限,发现概率P d减小;降低检测门限,虚警概率P fa 增大。
因此,在实际设计过程中,需要根据具体使用情景权衡考虑。
需要注意的是:1. 噪声电平的包络的概率密度曲线是对噪声电平归一化后的,对所有的雷达设计均适用。
2. 图像的横坐标不是实际的雷达接收机检测信号所设置的信号电平。
而是在确定虚警概率和检测信噪比门限U R/σ后,再根据雷达实际的噪声电平得到信号检测对应的实际信号电平门限。
设信噪比检测门限实际雷达的噪声电平则信号电平门限值为:实际设计中雷达接收机的噪声基底不同,造成不同的原因主要有:1. 接收机带宽不同2. 接收机内部噪声温度不同易混淆点:提高雷达的检测门限,不影响接收机前端的噪声系数。
(这两个是毫不相关的概念)。
激光雷达考试浓缩笔记

一、技术介绍1.激光雷达概念:激光探测与测量,Light Detection And Ranging,英文缩写为LiDAR,LiDAR的光源一般采用激光,原理与雷达原理相同,故都将LiDAR翻译为激光雷达,也可称为激光扫描仪。
工作原理:脉冲式和相位式,它有激光发射器、接收器、时间计数器、微电脑构成,成像为点云,并以数据为基础重建目标三维模型。
(相位式问题:相位测量仅能测出不足一周的相位差,相位差的分辨率限制测距的精度,为了保证精度而又兼顾测程,采用几个调制光波长配合测距。
)激光扫面技术分类:1D激光测距、2D激光测距、3D激光测距、多传感器的集成激光雷达和普通雷达的区别:普通雷达:射频电磁波被送到大气中,大气中的目标散射发射电磁波的一部分到普通雷达的接收器中。
激光雷达也发射和接收电磁波,但其频率相对较高,激光雷达工作在紫外光、可见光、近外红三个光谱波段激光雷达存在的问题两点同步难匹配、数据处理自动化程度低测量复杂度高、仪器昂贵、操作人员需要较高技巧、生产成本高、费时对天气、可见度等自然条件要求高很难获取较全面的信息2.三维激光扫描技术概念:三维激光扫描系统:由三维激光扫描仪、计算机、电源供应系统、支架以及系统配套软件构成、而三维激光扫描仪又由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑、CCD相机以及软件组成。
三维激光扫描技术是一种先进的全自动高精度立体扫描技术,用三维激光扫描仪获取目标物表面各点的空间坐标,然后由获得的测量数据构造出目标物的三维模型的一种全自动测量技术。
是继GPS后的又一项测绘新技术,已成为空间数据获取的重要技术手段。
原理:三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后沿几乎相同的路径反向传回到接收器,可以计算目标点P与扫描仪距离S。
激光测距技术是三维激光扫描仪的主要技术之一,激光测距的原理主要有基于脉冲测距法、干涉测距法、激光三角法三种类型。
四年级下册第十一课笔记
四年级下册第十一课笔记一、字词部分。
1. 生字。
- 蝙(biān)蝠(fú):这俩字可有点难写呢。
“蝙”是虫字旁,右边是“扁”,注意“扁”字里面一横不要落下哦。
“蝠”也是虫字旁,右边是“畐”。
这俩字都是左右结构,就像两个小伙伴紧紧挨在一起。
- 蛾(é):这个字简单些,女字旁加上“我”。
飞蛾扑火的“蛾”,它也是昆虫哦。
- 蚊(wén):虫字旁加个“文”,夏天嗡嗡叫着咬人的小坏蛋就是它啦。
- 避(bì):走之底加上“辟”。
这个字表示躲开的意思,就像我们躲猫猫一样,要避开某些东西。
- 锐(ruì):金字旁加个“兑”。
形容东西很锋利,像蝙蝠的嘴发出的超声波就很敏锐,能准确探测到障碍物。
- 铛(dāng):金字旁加个“当”,铃铛的“铛”,不过在课文里是“铛(dāng)的一声”,是一种声音的描述。
- 蝇(yíng):虫字旁加个“黾(mǐn)”,苍蝇也是昆虫,到处乱飞,可讨厌了。
- 揭(jiē):提手旁加个“曷(hé)”,这个字有把东西掀开、使隐蔽的事物显露的意思,就像科学家揭开蝙蝠飞行秘密那样。
- 碍(ài):石字旁加个“得”字的右半边。
它表示阻挡、妨碍的意思,障碍物的“碍”嘛。
2. 多音字。
- 系(jì、xì):在“系着铃铛”里读“jì”,当它表示关系等意思的时候读“xì”,就像系鞋带和数学里的关系,读音可不一样呢。
- 行(xíng、háng):“飞行”的时候读“xíng”,表示行列的时候读“háng”,像大雁排着行(háng)飞的时候,它们是在行(xíng)进。
3. 词语理解。
- 横七竖八:形容东西摆放得很杂乱,没有条理。
就像小朋友玩完玩具后,扔得横七竖八的。
- 敏锐:感觉灵敏,眼光尖锐。
蝙蝠的耳朵和嘴配合起来能敏锐地探测周围环境,就像一个超级灵敏的小雷达。
《智能交通中毫米波雷达数据处理方法与实现》读书笔记模板
1
2.1 CW体制
2
2.2 LFMCW体 制
3
2.3 Fห้องสมุดไป่ตู้K体制
4
2.4 CW-FMCW 复合体制
5
2.5本章小结
3.2测速雷达角度 自适应算法
3.1去噪算法
3.3本章小结
3.1去噪算法
3.1.1基于EMD的去噪算法 3.1.2自相关检测法
3.2测速雷达角度自适应算法
3.2.1火车测速雷达系统 3.2.2基于样本统计特性的雷达摆角自修正算法
智能交通中毫米波雷达数据处 理方法与实现
读书笔记模板
01 思维导图
03 作者介绍 05 读书笔记
目录
02 内容摘要 04 目录分析 06 精彩摘录
思维导图
本书关键字分析思维导图
车辆
系统
方法
跟踪
研究
技术
跟踪
雷达
雷达
数据 算法
数据
交通
雷达
测速雷达
目标
机器
小结
体制
内容摘要
内容摘要
多输入多输出(Multiple Input Multiple Ontput,MIMO)毫米波雷达是国内外雷达领域的研究热点, MIMO毫米波雷达克服了传统雷达单发单收的缺点,提高了能量利用率、测角精度、杂波抑制能力,降低了截获率。 与激光雷达和视频检测相比,毫米波雷达具有非常大的优势,因此MIMO毫米波雷达广泛应用于智能交通领域。本 书从智能交通系统中的车辆检测、测速、跟踪技术出发,依据真实的MIMO毫米波雷达测量数据,介绍车辆跟踪系 统架构,以及常用的交通雷达体制,并对这些体制进行比较,得出FSK是最适合应用于测速的交通雷达体制。本 书重点介绍了处理毫米波雷达探测数据的方法,包括初期对接收到的雷达信号进行去噪及利用获取的点云数据对 雷达摆角进行修正,中期的点云数据聚类处理,后期的车辆轨迹关联、跟踪技术。在介绍这些技术时,不仅应用 了经典的雷达数据处理技术,还提出了一些改进算法,并对目前热门的图像处理技术进行了介绍。
四年级上册第6课笔记
四年级上册第6课笔记一、生字词。
1. 认读生字。
- “蝙”(biān):蝙蝠的“蝙”,是个形声字,左边的“虫”表示和昆虫有关,右边的“扁”表示读音。
可别读错啦,想象一下蝙蝠那小小的身子。
- “蝠”(fú):和“蝙”字组成“蝙蝠”这个词。
这两个字就像一对好兄弟,总是一起出现呢。
- “启”(qǐ):开启的“启”。
它的甲骨文就像用手打开一扇门,多形象啊。
比如“启发”,就像是打开了思维的大门。
- “即”(jí):即使的“即”。
这个字有点容易和“既”搞混哦。
“即”更有一种当下、靠近的感觉,就像“即将”,事情马上就要发生了。
- “锐”(ruì):锐利的“锐”。
左边的“钅”表示金属,金属做的东西往往很锋利,像锐利的刀啊。
右边的“兑”读音相近。
- “系”(xì、jì):在这课里读“jì”,系鞋带的“系”。
它还有个读音“xì”,像关系。
系鞋带的时候,就像把鞋带和鞋子紧紧联系在一起。
- “铛”(dāng):铃铛的“铛”,是个形声字,左边的“钅”表示金属,右边的“当”表示读音。
铃铛响起来的时候,铛铛铛的,可好听了。
- “蝇”(yíng):苍蝇的“蝇”,也是个形声字,左边的“虫”表示昆虫,右边的“黾”(mǐn)表示读音的一部分。
苍蝇可是很讨厌的小昆虫呢。
- “证”(zhèng):证明的“证”。
有证据才能证明一件事情的真假呀。
- “障”(zhàng):障碍的“障”。
就像一堵墙一样,挡住了我们前进的路,是一种阻碍。
- “荧”(yíng):荧光的“荧”。
荧光就像那种暗暗的、有点神秘的光,像萤火虫的光。
2. 多音字。
- 系:jì(系鞋带、系扣子),xì(关系、联系)。
可以这样记,当你要做把东西绑起来这个动作的时候,就读jì;当表示事物之间的关联时,就读xì。
- 行:xíng(飞行、行走),háng(银行、行列)。
雷达说明书--笔记

同频干扰的抑制:PICTURE MENU--INT REJECT OFF/1/2/3 选择抑制程度打开关闭距离圈:MENU--MARK--RING ON/OFF,设置固定距离圈。
雷达防卫警报:设置报警区域:右上图设置报警属性轨迹跟踪时间:TRAIL--OFF/15S/30S/1MIN/3MIN/6MIN/15MIN/30MIN轨迹色调:TRAIL--TRAIL GRAD轨迹色调--SINGLE单色调/MULTI多色调清除屏幕轨迹:长按CANCLE TRAIL、刻度线:INDEX LINE选择刻度线的数量:MENE--MARK--INDEX LINE--1/2/3/6选择刻度线的模式:MENE--MARK--INDEX LINE MODE--VERTICAL/HORIZONTAL在到达报警时间之前 ALARM ACK,则重新开始倒计时。
探测SART:MENU--ECHO--SART ON设置ARPA物标的尾迹颜色:MENE--AIS/ARPA--ARP SYMBOL--PAST POSITION COLORARPA 捕捉物标:ACQ 手动捕捉ARP警戒区--GZ 1/2设置多边形警戒区:MENU--ARP/AIS--GUARD POL YGON多边形警戒区--OFF/STAB GND/STAB HDG/STAB NORTHARP 性能测试:MENU--CUSTOMIZE/TEST--TEST--ARP TEST按TX STBY终止测试航行设置:导航状态、ETA、目的地、吃水和船员。
AIS DISP--AIS TARGET--VOY AGE DATA设置AIS路径尾迹颜色:MENU--ARP/AIS--AIS SYMBOL--PAST POSN COLOR 本船数据:AIS DISP--AIS TARGET--STA TIC DATA--标注雷达地图标记和线条:光标移动到MARK方框,右键选择MAP MARK地图标记MARK DELETE删除点和线删除所有的地图标记和线条:MENU--PLOTTER--DATA ERASE--MARK ALL ERASE 测绘本船轨迹:设置轨迹频率:MENU--PLOTTER--OWN TRACK INTERV AL在本菜单下也可以设置本船轨迹的颜色,他船轨迹的间隔时间、颜色。
激光雷达笔记
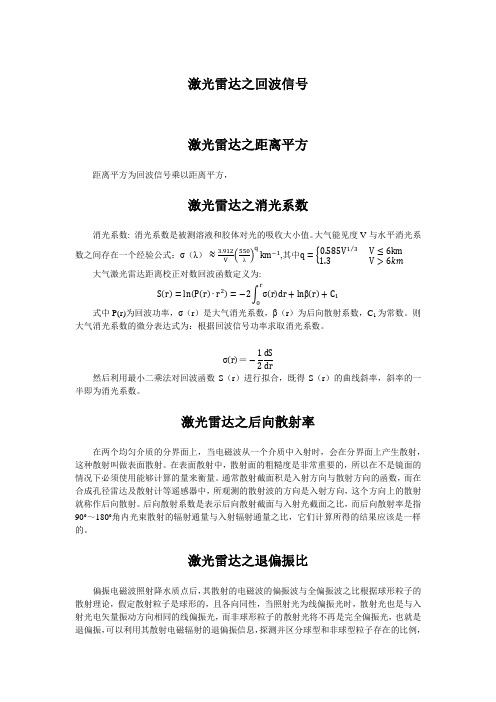
激光雷达之回波信号激光雷达之距离平方距离平方为回波信号乘以距离平方,激光雷达之消光系数消光系数: 消光系数是被测溶液和胶体对光的吸收大小值。
大气能见度V与水平消光系数之间存在一个经验公式:σ(λ)≈3.912V (550λ)qkm−1,其中q={0.585V13⁄ V≤6km1.3 V>6km大气激光雷达距离校正对数回波函数定义为:S(r)=ln(P(r)∙r2)=−2∫σ(r)dr+lnβ(r)+C1r式中P(r)为回波功率,σ(r)是大气消光系数,β(r)为后向散射系数,C1为常数。
则大气消光系数的微分表达式为:根据回波信号功率求取消光系数。
σ(r)=−12 dS dr然后利用最小二乘法对回波函数S(r)进行拟合,既得S(r)的曲线斜率,斜率的一半即为消光系数。
激光雷达之后向散射率在两个均匀介质的分界面上,当电磁波从一个介质中入射时,会在分界面上产生散射,这种散射叫做表面散射。
在表面散射中,散射面的粗糙度是非常重要的,所以在不是镜面的情况下必须使用能够计算的量来衡量。
通常散射截面积是入射方向与散射方向的函数,而在合成孔径雷达及散射计等遥感器中,所观测的散射波的方向是入射方向,这个方向上的散射就称作后向散射。
后向散射系数是表示后向散射截面与入射光截面之比,而后向散射率是指90°~180°角内光束散射的辐射通量与入射辐射通量之比,它们计算所得的结果应该是一样的。
激光雷达之退偏振比偏振电磁波照射降水质点后,其散射的电磁波的偏振波与全偏振波之比根据球形粒子的散射理论,假定散射粒子是球形的,且各向同性,当照射光为线偏振光时,散射光也是与入射光电矢量振动方向相同的线偏振光,而非球形粒子的散射光将不再是完全偏振光,也就是退偏振,可以利用其散射电磁辐射的退偏振信息,探测并区分球型和非球型粒子存在的比例,退偏振度定义为:垂直分量的散射波强度与平行分量的散射波强度之比。
偏振特性可以使用退偏振比(Depolarization Ratio)来衡量,比值应该小于1。
蝙蝠和雷达课文笔记

蝙蝠和雷达课文笔记《蝙蝠和雷达》是一篇科普文章,介绍了科学家们通过研究蝙蝠的夜间飞行,发现了蝙蝠能够在夜间飞行的秘密,并从中获得启示,发明了雷达,为飞机的夜间飞行提供了安全保障。
文章首先提出了一个问题:飞机如何在漆黑的夜晚安全行驶?这个问题引起了读者的兴趣,激发了我们对蝙蝠和雷达的好奇心。
接着,文章通过叙述蝙蝠在夜间飞行的特点和科学家们对蝙蝠的研究,揭示了蝙蝠能够在夜间飞行的秘密。
最后,文章介绍了雷达的发明和应用,以及雷达与蝙蝠之间的联系。
在阅读这篇文章时,我们可以从中学到很多有趣的知识。
例如,我们了解到蝙蝠能够在夜间飞行,是因为它们可以利用超声波来感知周围的环境。
我们还了解到,科学家们通过研究蝙蝠的飞行方式,发明了雷达这种能够探测目标的电子设备。
这些知识不仅让我们对蝙蝠和雷达有了更深入的了解,也让我们对自然界的奇妙之处感到惊叹。
在阅读这篇文章时,我们还应该注意文章中的重点内容和中心思想。
文章的中心思想是:科学家们通过研究蝙蝠的飞行方式,发明了雷达这种能够探测目标的电子设备,解决了飞机在夜间飞行的安全问题。
这个中心思想贯穿了整个文章,让我们深刻认识到科学发明的巨大作用和重要性。
在总结这篇文章时,我们可以得出以下结论:第一,科学发明的力量是无穷的,科学家们通过研究蝙蝠的飞行方式,发明了雷达这种能够探测目标的电子设备,解决了飞机在夜间飞行的安全问题。
第二,自然界中存在着许多奇妙的现象和生物,我们需要不断地去探索和研究它们,才能更好地了解和利用它们。
第三,科学知识对我们的生活和学习都有很大的帮助,我们应该积极学习和掌握科学知识,为未来的发展打下坚实的基础。
总之,《蝙蝠和雷达》这篇文章不仅让我们了解了蝙蝠和雷达的相关知识,更重要的是让我们认识到了科学发明的巨大作用和重要性。
在未来的学习和生活中,我们应该积极探索和研究自然界中的各种现象和生物,掌握科学知识,为人类的未来发展做出更大的贡献。
《雷达导引头概论》读书笔记思维导图PPT模板下载
5.3 指令形成
0 1
5.1.1 常 规检测
0 2
5.1.2 恒 虚警检测
0 3
5.1.3 预 定检测
0 4
5.1.4 高 分辨检测
0 6
5.1.6 积 累检测
0 5
5.1.5 识 别检测
5.2.1 速度信息 5.2.2 距离信息
5.2.3 角度信息 5.2.4 仿形处理
5.3.2 制导指令
5.3.1 管理指令
06 第6章 主动导引头
目录
07 第7章 半主动导引头
08 第8章 被动导引头
09 第9章 复合导引头
010 第10章 系统设计
011 第11章 分系统技术
012 第12章 试验技术
目录
013 附录A 缩略术语汇总 表
015 参考文献
014
附录B 物理量符号汇 总表
本书介绍雷达导引头的基本体制和相关技术,全书共12章,内容包括概述、目标、环境、信号与噪声、导引 头基本功能、主动导引头、半主动导引头、被动导引头、复合导引头、系统设计、分系统技术和试验技术。本书 可作为从事雷达导引头研制工作的工程技术人员和高等院校相应专业师生的参考书。
11.3.6 信道化 接收机
11.3.5 锁相接 收机
11.3.7数字化接 收机
11.4.1 功能与技 术要求
11.4.2 硬件结构
11.4.3 软件流程
11.4.4 主要子程 序
11.5.1 功能 1
与技术要求
11.5.2 原理 2
框图与主要部 件
3 11.5.3 角预
定回路
4 11.5.4 角稳
10.5.2 可靠 2
性模型
3 10.5.3 可靠
雷达原理笔记之精度与分辨力
1 雷达原理笔记之精度与分辨力1 雷达原理笔记之精度与分辨力1.1 测距精度与分辨力1.1.1 精度1.1.1.1 电磁波传播速度变化产生的测距误差1.1.1.2 回波延时测量误差产生的测距误差1.1.1.3 测度方法产生的测距误差1.1.1.4 大气折射引起测距误差1.1.2 分辨力1.2 测角精度与分辨力1.2.1 精度1.2.1.1 相位法测角的精度问题1.2.1.2 振幅法测角的精度问题1.2.2 分辨力1.3 测速精度与分辨力1.3.1 精度1.3.2 分辨力1.1 测距精度与分辨力1.1.1 精度根据距离测量的计算公式,通过将其全微分可以分析影响测距精度的因素。
即:由此可知,距离测量的精度主要受回波延时误差以及电磁波在空间传播速度的变化影响。
1.1.1.1 电磁波传播速度变化产生的测距误差真空中电磁波的传播速度等于光速,保持不变。
但是在实际的大气中,电磁波的传播速度并不是一个固定值。
随大气密度、温度、湿度等因素影响,大气传播的介电常数,磁导率发生改变。
是一个随机变量。
且这种误差属于随机误差无法弥补。
依据雷达测距的基本原理,测距误差与真实距离,电波传播速度误差与真空电波传播速度有如下关系:进而:由此可以看出,由电磁波传播速度误差带来的测距误差,随着目标距离增大也会增大。
1.1.1.2 回波延时测量误差产生的测距误差回波信号叠加有加性噪声信号,接收机的输入信号可以看作是一个随机信号。
经过最大似然分析,回波信号经过匹配滤波处理后的延时的估值方差为:其中,,(信号的均方根带宽)由最后的结果可看出时间延时估值方差反比与回波信号的信噪比以及信号的均方根带宽。
1.1.1.3 测度方法产生的测距误差1.1.2 分辨力定义:距离分辨力是指,同一方向上两个大小相等点目标之间的最小可分辨距离。
计算公式:相位法测角原理公式:将上式全微分分析影响测角精度的因素:。
雷达原理笔记之线性调频连续波雷达测距测速原理

1 雷达原理笔记之LFMCW雷达测距测速
1 雷达原理笔记之LFMCW雷达测距测速
1.1 单边扫频锯齿波
1.1.1 静止目标回波分析
1.1.2 运动目标回波分析
1.1.3 优缺点分析
1.2 双边扫频三角波
1.2.1 运动目标回波分析
调频连续波雷达在当今的雷达行业仍占有较高的地位。
由于其无盲区测距的巨大优势,现在人们更多地将其应用在车载雷达行业。
调频连续波雷达现在主要有单边扫频(锯齿波)和双边扫频(三角波)两种调制形式。
1.1 单边扫频锯齿波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.1.1 静止目标回波分析
静止目标(或者径向速度为0)的目标没有多普勒频移,因此回波信号在频率轴没有频移而只是在时间上延后时间。
雷达接收机前端将发射信号和回波信号进行混频得到差拍频率。
有如下关系式:
由此可以解得:
由此便可求出距离目标的距离。
而静止目标(或者径向速度为0)。
与脉冲体制雷达一样,单边扫频锯齿波雷达同样存在蹴鞠模糊问题:
当回波信号的时间延迟大于单边扫频锯齿波雷达的周期时会出现距离测量的模糊现象。
真实目标距离与测量值相差整数个最大不模糊距离()。
1.1.2 运动目标回波分析
由上图可以清楚地看出,目标的多普勒频移、差拍频率以及回波延时,满足如下关系:
进一步整理,得到:
1.2 双边扫频三角波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.2.1 运动目标回波分析
根据上图可以清楚的看出、、、有如下关系:。
雷达原理笔记之目标RCS
上图是(远距离搜索型)雷达截面积与波长的关系曲线,横坐标是对波长归一化的目标的尺寸。
下面简要分析各个区域形成的原因:
瑞利区:入射电磁波波长大于理想球体的尺寸,电磁波主要以绕射方式传
播。
光学区:当电磁波波长远小于理想球体的尺寸时,电磁波主要以散射为主。
因此渐趋于稳定,极限是理想球体的截面积。
1.2 RCS与波长的特性对雷达设计的指导意义
首先明确这是一个远距离搜索型雷达,因此其光学区的目标RCS=
题目要求最大作用距离尽量远,因此一般取,
因此,。
雷达应选择工作在X波段。
注意:虽然振荡区的某些区间可以取得高于光学区RCS的效益,但是由于其探测的不稳定性,单基地一般不选用。
但是对于组网雷达来说却是一个值得尝试的想法。
部编版 语文四年级上册 词语+课堂笔记 - 第一、二、三单元

【第一课《观潮》的词语】观潮[ guān cháo ] 据说[ jùshuō] 大堤[ dàdī] 宽阔[ kuān kuò] 盼望[ pàn wàng ]闷雷滚动[ mèn léi gǔn dòng ] 顿时[ dùn shí]逐渐[ zhújiàn ] 堵塞[ dǔsè] 犹如[ yóu rú]山崩地裂[ shān bēng dìliè] 地震[ dìzhèn ]霎时[ shàshí] 余波[ yúbō]【第一课《观潮》的笔记】1.《观潮》一课是按照时间顺序进行描写,过程分为潮来前,潮来时,潮头过后。
2.“浪潮越来越近,犹如千万匹白色战马齐头并进(比喻),浩浩荡荡地飞奔而来;那声音如同山崩地裂(夸张),好像大地都被震得颤动起来”,这里运用了比喻和夸张的修辞手法来描写大潮的形态和声音。
3.默写抽查:《观潮》的第3段、第4段和《浪淘沙》。
【拼音簿的抄写内容】1.观潮cháo cháo jùjù潮(潮水)潮(观潮)据(据说)据(根据)dīdīkuòkuò堤(大堤)堤(堤岸)阔(宽阔)阔(广阔)pàn pàn gǔn gǔn盼(盼望)盼(期盼)滚(滚动)滚(滚落)dùn dùn zhúzhú顿(顿时)顿(安顿)逐(逐渐)逐(逐步)jiàn jiàn dǔdǔ渐(渐渐)渐(渐变)堵(一堵)堵(堵塞)yóu yóu bēng bēng犹(犹如)犹(犹豫)崩(山崩)崩(崩塌)zhèn zhèn shà shà震(地震)震(震动)霎(霎时)霎(霎那)yú yú余(余波)余(多余)【第二课《走月亮》的词语】【作者:吴然】淘洗[ táo xǐ]牵着[ qiān zhe ] 牵手[ qiān shǒu ]鹅卵石[ éluǎn shí]坑坑洼洼[ kēng keng wāwā]填上[ tián shàng ] 填空[ tián kòng ]庄稼[ zhuāng jia ]风俗[ fēng sú]跳出[ tiào chū] 跳跃[ tiào yuè]葡萄[ pútáo ] 水稻[ shuǐdào ]成熟[ chéng shú]【第二课《走月亮》的笔记】1.《走月亮》这是一篇充满诗情画意的散文(体裁),本文的作者是吴然,本文以“走”为线索,写了途中看到的景物及联想,表达了我和阿妈浓浓的亲情。
雷达说明书--笔记

同频干扰的抑制:PICTURE MENU--INT REJECT OFF/1/2/3 选择抑制程度打开关闭距离圈:MENU--MARK--RING ON/OFF,设置固定距离圈。
雷达防卫警报:设置报警区域:右上图设置报警属性轨迹跟踪时间:TRAIL--OFF/15S/30S/1MIN/3MIN/6MIN/15MIN/30MIN轨迹色调:TRAIL--TRAIL GRAD轨迹色调--SINGLE单色调/MULTI多色调清除屏幕轨迹:长按CANCLE TRAIL、刻度线:INDEX LINE选择刻度线的数量:MENE--MARK--INDEX LINE--1/2/3/6选择刻度线的模式:MENE--MARK--INDEX LINE MODE--VERTICAL/HORIZONTAL在到达报警时间之前 ALARM ACK,则重新开始倒计时。
探测SART:MENU--ECHO--SART ON设置ARPA物标的尾迹颜色:MENE--AIS/ARPA--ARP SYMBOL--PAST POSITION COLOR ARPA 捕捉物标:ACQ 手动捕捉ARP警戒区--GZ 1/2设置多边形警戒区:MENU--ARP/AIS--GUARD POL YGON多边形警戒区--OFF/STAB GND/STAB HDG/STAB NORTHARP 性能测试:MENU--CUSTOMIZE/TEST--TEST--ARP TEST按TX STBY终止测试航行设置:导航状态、ETA、目的地、吃水和船员。
AIS DISP--AIS TARGET--VOY AGE DATA设置AIS路径尾迹颜色:MENU--ARP/AIS--AIS SYMBOL--PAST POSN COLOR 本船数据:AIS DISP--AIS TARGET--STA TIC DATA--标注雷达地图标记和线条:光标移动到MARK方框,右键选择MAP MARK地图标记MARK DELETE删除点和线删除所有的地图标记和线条:MENU--PLOTTER--DATA ERASE--MARK ALL ERASE 测绘本船轨迹:设置轨迹频率:MENU--PLOTTER--OWN TRACK INTERV AL在本菜单下也可以设置本船轨迹的颜色,他船轨迹的间隔时间、颜色。
小学语文四年级上册《蝙蝠和雷达》课堂笔记
小学语文四年级上册《蝙蝠和雷达》课堂笔记
蝙蝠和雷达是我们生活中常见的一些事物,但是很多小朋友可能并不知道它们之间的联系和原理。
在这堂语文课上,老师为我们详细讲解了蝙蝠和雷达的相关知识,让我们加深了对其的认识和理解。
首先,老师向我们介绍了蝙蝠的特点和习性。
蝙蝠是夜行性动物,善于在黑暗中飞行,并且它们不能看到任何的光线。
蝙蝠采用“定位声”来判断周围环境并寻找食物。
在飞行时,蝙蝠会发出一系列高频的声音,这些声音会反弹回来,蝙蝠依据这些反弹回来的声音来确定周围环境的情况。
这个过程就叫做蝙蝠定位。
接下来,老师向我们介绍了雷达的原理和应用。
雷达是一种能够发送高频电波,然后接收这些电波的反射信号来探测目标物体的设备。
雷达广泛应用于军事、民用航空、气象等方面。
早期,雷达主要用于军事侦察和导航,后来发展到了民用领域,如航空监测、无人机探测等。
最后,老师通过一个实验向我们演示了蝙蝠定位和雷达探测的原理。
老师用一个小球通过绳索悬挂在教室中央,让我们在黑暗中使用小手电来找到它。
结果证明,小手电无法在黑暗中找到小球。
接着,老师使用一个超声波探测仪向小球发出声波,然后对发射回来的信号进行分析,最终找到了小球。
这个实验生动形象地展现了蝙蝠和雷达的原理。
在今天的课程中,我们不仅学到了有关蝙蝠和雷达的知识,还
通过实验加深了对它们的理解和掌握。
通过这样的教学方式,我们可以更加生动地了解到各种自然现象和科学原理,从而更好地认识和探索这个世界。
人教版八年级下册英语第十单元笔记。

人教版八年级下册英语第十单元笔记。
《人教版八年级下册英语第十单元笔记》Unit 10 A mystery in the computer game【词汇】1. mysterious adj. 神秘的;不可思议的2. doorbell n. 门铃3. replied v. 回答;答复4. radar n. 雷达5. solve v. 解决;解答6. message n. 消息;信息7. pass n. 路过;通过8. code n. 密码;代码9. teenager n. 青少年;十几岁的人10. wonder v. 想知道;想弄明白11. scanner n. 扫描仪;扫描设备12. disappear v. 消失;不见13. suspect v. 怀疑;猜想14. kidnapper n. 绑架者;拐子15. rescue v. 营救;解救【重点短语】1. open the door 打开门2. ring the doorbell 按门铃3. solve the mystery 解开谜团4. check the radar 检查雷达5. receive a message 收到一条消息6. walk past 路过7. scan the code 扫描代码8. disappear from 从...消失9. suspect of 怀疑...犯罪10. carry out 执行;实施【重点句型】1. What a mysterious computer game! 多么神秘的电脑游戏啊!2. He replied to my message.他回复了我的消息。
3. I wonder how he solved the mystery. 我想知道他是如何解开谜团的。
4. The car disappeared from the road.那辆车从路上消失了。
5. The police suspect him of kidnapping. 警察怀疑他绑架了人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天气雷达是探测降水系统的主要手段,是对强对流天气(冰雹、大风、龙卷和暴洪)进行监测和预警的主要工具之一。
多普勒雷达除测量反射率因子、还可测量径向速度和速度谱宽。
S频段(10cm)、C频段(5cm)、X频段(3cm)。
我国新一代天气雷达的布局原则:1、在我国沿海和多强降水的地区,布设S频段;2、在我国强对流天气发生和活动较频繁、经济比较发达的中部地区,布设C频段;3、其他地区暂不布设全国组网的站点;4、在天气、气候相近的地区,组网新一代天气雷达在频段和规格上要尽可能统一;5、组网雷达站距密度应保证雷达探测能有效覆盖布网区域。
计划在全国共布臵158部新一代天气雷达。
新一代天气雷达的应用领域新一代天气雷达系统的应用主要在于对灾害性天气,特别是与风灾和冰雹相伴随的灾害性天气的监测和预警。
它还可以进行较大范围降水的定量估测,获取降水和降水云体的风场结构。
1、对灾害性天气的监测和预警;2、定量估测大范围降水;3、风场信息;4、改善高分辨率数值天气预报模式的初值场。
雷达估测降水除了雷达本身的精度的限制外,还受到降水类型(影响Z-R关系)、雷达探测高度、地面降水的差异和风等多种因素的影响。
新一代天气雷达由:雷达数据采集子系统(RDA)、雷达产品生成子系统(RPG)和主用户终端子系统(PUP)以及连接它们的通讯线路。
RDA由四部分构成:发射机、天线、接收机和信号处理器。
扫描方式:扫描方式#1:5分钟完成14个不同仰角上的扫描(14/5)扫描方式#2:6分钟完成9个不同仰角上的扫描(9/6)扫描方式#3:10分钟完成5个不同仰角上的扫描(5/10)体扫模式:VCP11:规定5分钟内对14个具体仰角的扫描VCP21:规定6分钟内对9个具体仰角的扫描VCP31:规定10分钟内对5个具体仰角的扫描VCP32:规定10分钟完成5个具体仰角与VCP31相同。
不同之处在于VCP31使用长脉冲而VCP32使用短脉冲。
VCP11通常在强对流风暴出现的情况下使用,而VCP21在没有强对流但有显著降水的情况下使用,其它情况下使用VCP31。
天气模式:天气模式A:降水模式,使用VCP11或VCP21;天气模式B:晴空模式,使用VCP31或VCP32;信号处理器完成三个重要功能:地物杂物波消除、模拟信号向数字化的基本数据的转换、退多普勒数据的距离折叠。
RDA内的数据记录第一级数据:指原始的由接收机输出的模拟数据;第二级数据:由信号处理器产生的最高时空精度的高分辨率基数据;第三级数据:由RPG生成基本产品:基本反射率因子、基本径向速度和基本谱宽产品;导出产品:由数字化的基数据经过使用特定的算法而得到的。
(合成反射率因子、垂直剖面、风暴路径信息STI、垂直累积液态含水量VIL、回波顶ET、冰雹指数HI、VAD风廓线VWP、中气旋M、龙卷特征TVS 等33种)。
主用户处理器PUP的主要功能是获取、存储和显示产品。
主要包括:1、产品请求(获取);2、产品数据存储和管理;3、产品显示;4、状态监视;5、产品编辑注释。
所有数据、算法和产品的范围可达230km。
超过230km将没有速度数据。
新一代天气雷达的平均径向速度产品可以用来探测切变区、辐合、辐散以及与局地强风暴相关的中气旋。
天气雷达的主要局限性有三个:1、一是波速中心的高度随距离的增加而增加;2、二是波束宽度随距离的增加而展宽;3、静锥区的存在。
前两点使雷达对于远距离的目标的探测能力降低,而第三点使得雷达对于非常近的目标物的控测能力受限。
粒子对电磁波作用的两种基本形式是散射和吸收。
后向散射截面的定义是:设有一个理想的散射体,其截面面积为σ,它能全部接收发射到其上的电磁波能量,并全部均匀地向四周散射,若该理想散射体返回雷达天线处的电磁波能流密度,恰好等于同距离上实际散射体返回雷达天线的电磁波能流密度,则该理想散射体的截面面积σ就称为实际散射体的后向散射截面。
当雷达波长确定后,球形粒子的散射情况在很大程度上依赖于粒子直径D和入射波波长λ之比。
对于D远小于λ情况下的球形粒子散射称为瑞利散射;而D与λ尺度相当情况下的球形粒子散射称为米(Mie)散射。
在瑞利散射情况下球形粒子的后向散射截面与粒子直径的6次方成正比,与波长的4次方成反比。
瑞利散射情况下冰球的后向散射截面大约只有同样大小水球的1/5。
冰水混合球可以分为两种:一种是水包冰球;另一种是冰水均匀混合球。
粒子群时间平均回波功率等于构成粒子群的各个单个粒子产生的回波功率的总和。
电磁波能量沿传播路径减弱的现象,称为衰减。
由雷达波速传播路径相对于地球表面的曲率导出的曲率半径,称为等效地球半径(Rm)。
在标准大气情况下,Rm=8500公里,为实际地球半径的4/3倍。
此时,K=4x10-5/km,波束路径向下弯曲,这种折射称为标准大气折射。
超折射:当波速路径的曲率大于地球表面的曲率时,即雷达波速在传播过程中将碰到地面,经地面反射后继续向前传播,然后,再弯曲到地面,再弯曲到地面,再经地面反射,重复多次,雷达波速在地面和某层大气之间,依靠地面的反射向前传播。
超折射形成的气象条件:是因为大气中的折射系数随高度迅速减小而造成的。
气温向上递增,同时水汽压向上迅速递减,也就是常说的暖干盖的大气层结。
负折射产生的气象条件:湿度随高度增加,温度向上迅速递减。
在盛夏大陆的中午,大气底层温度递减率有可能大于干绝热递减,从而出现负折射。
冷空气移到暖水域上空时,也有可能产生负折射现象。
波长是决定雷达性能的一个最重要的参数。
我国新一代天气雷达使用两种脉冲宽度:短脉冲和长脉冲,对应的空间长度分别约为500m和1500m。
每秒产生的触发脉冲的数目,称为脉冲重复频率,用PRF表示。
两个相邻脉冲之间的间隔时间,称为脉冲重复周期,用PRT表示。
天气雷达的天线,由辐射体和反射体两部分组成。
天线方向图中在最大发射方向上的称为主波瓣,侧面的称为旁瓣,相反方向的称为尾瓣。
在天线方向图上,两个半功率点方向的夹角,称为波束宽度。
通常所说的波束宽度,指的是天线主瓣的宽度。
我国S波段新一代天气雷达的天线直径9m,波束宽度约为1度。
辐射总功率相同时,定向天线在最大辐射方向的能流密度与各向均匀辐射的天线的能流密度之比,称为天线增益。
能流密度是指圆形横截面单位面积上的能量。
随着距离的增大,能流密度迅速减小。
雷达回波的强度,除了取决于雷达的参数之外,还取决于云雨的物理特性,以及它们离开雷达的距离。
反射率:单位体积中云雨粒子后向散射截面的总和,称为气象目标的反射率,用η表示。
降水粒子的后向散射截面不仅取决于降水粒子本身,还取决于雷达的波长,不过与其他的雷达参数无关。
所以相同波长的雷达测得的反射率可以相互比较。
反射率因子:单位体积中降水粒子直径6次方的总和称为反射率因子,用Z表示。
反映了气象目标内部降水粒子的尺度和数密度,用来表示气象目标的强度。
Z只取决于气象目标本身而与雷达参数和距离无关。
所以不同参数的雷达测得的Z值可以相互比较。
雷达气象方程中的C只决定于雷达参数和降水相态。
Ze称等效反射率因子:dB和dBZ是完全不同的概念,前者只是回波功率的一种相对表示,后者是反射率因子的对数表示。
dBZ=20lgr+dB-A,右端第一项为距离订正项;第二项是接收功率(也可称为回波功率)与雷达最小可测功率之比的分贝数;第三项是只与雷达性能有关的常数。
最大不模糊距离:r max=C×T/2=C/2PRF距离折叠:当目标位于最大不模糊距离以外时,雷达却把目标物显示在最大不模糊距离以内的某个位臵,称之为距离折叠。
多普勒效应定义为当接收者或接收器与能量源处于相对运动状态时,能量到达接收者(器)时频率的变化。
通常约定:如果目标移向雷达,则其速度为负;如果目标远离雷达,则其速度为正。
f dop=-2V r/λ,这里V r是目标沿雷达波束经向的速度,f dop是由于目标做向着雷达或是离开雷达的运动而产生的多普勒频移,λ是电磁波的波长。
多普勒天气雷达不直接测量多普勒频移以确定目标的径向速度,而是利用相继返回的两个脉冲对之间的位相变化,这种脉冲对位相变化可以比较容易并且比较准确地测量。
这种测速技术叫做脉冲对处理。
雷达最终给出的径向速度是从多个(几十个)脉冲对得到的径向速度的平均值,称为平均径向速度,而相应的标准差称为谱宽。
与180度脉冲对相移所对应的目标物径向速度值称为最大不模糊速度Vmax=λ×PRF/4。
一些典型的气象特征和条件可导致相对高的谱宽:1、气团的界面附近,如锋面边界和雷暴的出流边界等;2、雷暴;3、切变区域;4、湍流;5、风切变;6、降落速度不同的尺度不同的雨和雪。
一些非气象条件也可使谱宽增加:1、天线转速;2、距离;3、雷达的信噪比。
由于最大不模糊距离与脉冲重复频率PRF成反比,而最大不模糊速度与脉冲重复频率PRF成正比,因此不存在一个单一的脉冲重复频率PRF能够同时使最大不模糊距离与最大不模糊速度都比较大,这通常称为多普勒两难。
两种基本取样模态:连续监测模态;连续多普勒模态。
三种取样方式:分离扫描方式(通常在低仰角使用);交替扫描方式;不考虑距离折叠的连续多普勒方式。
在降水粒子不太大时,水球的后向散射能力大于同尺寸的冰球,而在降水粒子很大时,水球的后向散射能力小于同尺寸的冰球。
PUP上所标注的回波所在高度是假定大气为标准大气情况下计算得的高度,与实际的回波高度之间是有差别的。
基数据中的反射率因子是通过对沿着雷达径向的四个取样体积平均得到的,其径向分辨率相当于4个取样体积的长度,方位角方向的分辨率与取样体积在方位角的分辨率相同。
平均径向速度与谱宽的分辨率与雷达取样体积的大小一致。
对于SA和SB型雷达,基数据中反射率因子的分辨率为1公里×1度,而径向速度和谱宽的分辨率为0.25公里×1度。
降水的反射率因子回波大致可分为三种类型:积云降水回波、层状云降水回波、积云层状云混合降水回波。
零度层亮度:在0度层以上,较大的水凝物大多为冰晶和雪花,过冷却水滴因为尺度较小对反射率因子的贡献不大。
当下降过程中经过0度层开始融化时,表面上出现一层水膜,而尺寸变化不大,此时反射率因子会因为水膜的出现而迅速增加。
当冰晶和雪花在进一步下降中完全融化为水滴时,其尺度会减小,同时大水滴的下落末速度增大,使单位体积内水滴个数减少,这两个因素会使反射率因子降低。
这样,在0度层附近,反射率因子回波突然增加,形成“零度层亮带”。
通常在比较高的仰角上比较明显。
降水区前沿呈线状的强反射率因子区为线状对流降水区,称为飑线。
“弓形回波”是地面大风的一很好的指示。
超级单体低层反射率因子最明显的特征钩状回波。
非降水回波包括:地物回波、海浪回波、昆虫和鸟的回波、大气折射指数脉动引起的回波、云的回波等。