基于改进BP神经网络优化的牛头刨床动力学仿真
一种改进的BP算法及其MatLab仿真

6 =
{
E ( W) Ei = = - 6 yi wi
p
y i 是第 i 个单元的输出 ( 9 )
(i - y ) ' net ) 单元 是输出单元 l( - g'
n =l
6n wn
单元 是隐层单元, 6 n 为第 n 个输出单元
( l0 )
修正权值: W = W+1 E ( ll ) E ( W) 现在用上述拟牛顿法来优化 BP 神经网络的权值 W。 即 令( f )= E ( W) , S I = AW I , AW I = W I +l - W I , I = 对于取 ( 8 )式中的 b, 在校正 Hesse 矩阵时, b 函数的选取可 以有很多种, 但是对于不同的函数 b, 算法的收敛速度变化 很大。 因此, 这里采用 b ( ST b 函数的选取非常关键。 I BI SI ) = l -e l +e
方程的进行非线性最小二乘逼近的拟牛顿算法。 它具有全局 收敛性和局部超线性收敛性。 基于这种方法, 本文提出了一 种算法, 用于 BP 神经网络训练。 仿真研究表明采用这种算 法, 能大幅度地提高 BP 神经网络的训练速度。
2
改进的 BP 算法
在拟牛顿算法中, 不直接求解函数 f 的 Hesse 矩阵, 而是
matlab的trainbfg算法的仿真结果结论综上所述本文提出的基于新拟牛顿方程的bp神经网络算法由于具有全局收敛性和局部超线性收敛性与基于传统拟牛顿方程的bp神经网络算法相比有效地提高了网络的收敛速度
2005 全国仿真技术学术会议论文集
一种改进的 BP 算法及其 Matlab 仿真
金朝红, 吴汉松
I T I I I I T I I I T I
基于Matlab的改进BP神经网络及其应用
关键词 : BP神经网络 ; M atlab;多组分同时测定 中图分类号 : TP - 399 文献标识码 : B 人工神经网络 (A rtificial Neural Network,简称 ANN )是基于模仿生物大脑的结构和功能而构成的一种信 息处理系统 . 它具有信息的分布存储 、 并行处理以及自学习等优点 ,已经在信息处理 、 模式识别 、 智能控制及 [1 - 4] 系统建模等领域得到越来越广泛的应用 . 近年来 , 有越来越多的化学工作者开始将 ANN 应用于解决化 学问题 ,并取得了一些成果 . BP 神经网络是目前应用最多的神经网络 , 它采用多层前向网络的反向传播算 法 ,优点是只要有足够的隐层和隐结点 , BP 网络可以逼近任意的非线性映射 . 但 B P 神经网络易出现学习速 度慢和陷入局部最小区及对参数选择敏感等问题 . 为此 ,人们对 B P 算法进行了许多改进 . 改进主要有两类 : 一类采用启发式技术 ,如附加动量法 、 自适应学习率法 ; 另一类是采用数字优化技术 ,如共轭梯度法 ,拟牛顿 [5] 法、 Levenberg - M arquardt (L - M )法 . 本文讨论了几种改进的 BP 算法 , 利用 M atlab 编制了仿真程序 , 并把 它们用于多组分同时测定中 ,取得了良好的效果 .
p
Δw 1nk ( i + 1 ) = μ∑ δ pk ( i) xpn .
p = 1
( 3) ( 4) ( 5) ( 6)
Δw 2km ( i + 1 ) = μ∑ δ pm ( i) O 1pk ( i) . 而 δ pm ( i) = ( t pm - O 2pm ( i) ) O 2pm ( i) ( 1 - O 2pm ( i) ) .
基于改进BP神经网络的数控机床振动趋势预测
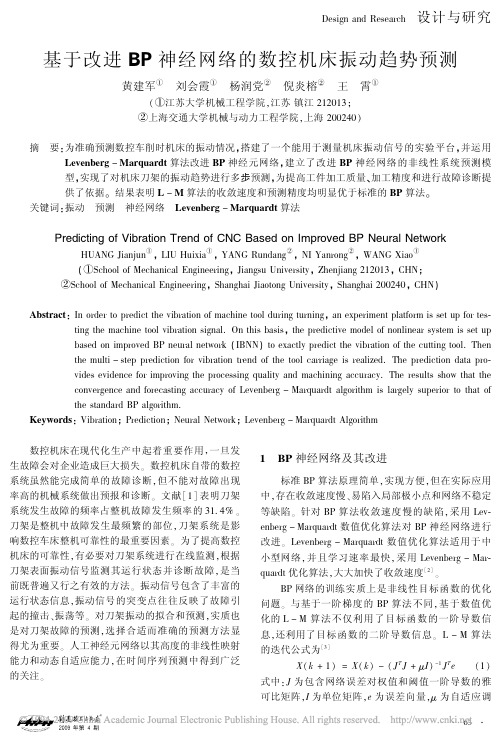
b"*18(.(>9"*".?/04设计与研究设计与研究4b "*18(.(>9"*".?/0!SJ 4!#2网络结构及其建立神经网络理论定理%!%3&%8%?%^定理-G .等已经证明#经过充分学习的三层f T 网络即只有一个隐含层的网络#能够以任意精度逼近任意非线性关系’所以#采用三层f T 网络建立刀架振动趋势预测模型’三层神经元网络由输入层%隐含层和输出层构成#每层由一个或者多个节点构成’输入层的节点数由输入向量的维数决定#输出层节点数由输出向量的维数决定’这里输入向量的维数取G #输出节点数为5’隐含层节点数可采用经验公式Z K >c !"c .作为参考#Z %"和>分别为隐含层%输入层和输出层节点数#.是常数#.)-E #5E .’然后经过反复试验最终确定G [F [5的网络模型效果较好’网络隐含层神经元变换函数采用).(*18型#输出层采用3%8*18型函数’采用("_++函数新建网络#同时确定网络结构和训练函数#在-A 2Q A f 工具箱中有Q "^"(‘"?8[-.?j;.?>优化方法的训练函数)?.1(3&’$2实验过程与趋势预测为了更加精确地采集机床振动信号#采用振动传感器进行数据采集#其示意图如图D 所示’压电式加速度传感器安装在刀架上#信号调理模块将传感器采集的电压信号进行预处理#然后传输到数据采集卡#数据采集卡将模拟信号转换为计算机能分析和处理的数字信号’对于该试验中采集振动信号的传感器采用朗斯的Q $E5GSA H 2内装=$压电加速度传感器#它将标准的压电加速度传感器与电荷放大器集于一体#简化了测试系统#其量程为p 68#灵敏度为5GEE &k H 8’传感器用磁力安装座固定在刀架上#安装位置如图6所示’信号调理模块选用美国b .).+%?)0公司的U$-Gf JP 加速度输入模块#它不仅能够为加速度传感器提供电源#还具有隔离直流电流#对信号进行放大%滤波等功能’数据采集卡采用美国,=公司的高速数据采集卡b "*18(.(>9"*".?/04设计与研究编号数值编号数值编号数值编号数值5EY 5J65E EY 5GS 5F EY 5GJ DP EY 5G6D EY 5JG 55EY 5GJ DE EY 5G6DF EY 5GF 6EY 5GF 5D EY 5GG D5EY 5G56E EY 5G6J EY 5GF 56EY 5JP DD EY 5GJ 65EY 5JN G EY 5GJ 5J EY 5GS D6EY 5GS 6D EY 5JN S EY 5GP 5G EY 5GJ DJ EY 5JP 66EY 5G6N EY 5SD 5S EY 5GG DG EY 5JS 6J EY 5GE P EY 5GF 5N EY 5JP DS EY 5S56G EY 5JF FEY 5GJ5PEY 5SEDNEY 5SD6SEY 5G6按照上述方法采用多"预测模型进行J "预测#经计算机仿真计算#预测结果如表D 所示’表"2预测结果编号实际值改进f T 网络标准f T 网络预测值误差H I 预测值误差H I 6N EY 5GF EY 5GFJ EY DG EY 5S6S DY PF 6P EY 5GD EY 5GSN 6Y EF EY 5G55EY GF 6F EY 5SD EY 5GSS 6Y 66EY 56FP 56Y S JEEY 5JNEY 5G65JY 5GEY D6DJNY JF由表D 可见#改进f T 神经网络方法的预测精度明显好于传统f T 算法#预测误差较小#满足预测精度要求’为了体现改进f T 算法的优越性#图J 和图G分别给出了相同实验条件下#利用改进f T 神经网络算法和标准fT 网络建立预测模型时的网络收敛情况’在本次实验中利用改进的f T 网络建立预测模型时平均P "就能达到要求的训练精度#而用标准fT 网络要训练上万次#采用改进的f T 算法建立网络模型#在达到相同训练精度的条件下节省了时间’:结语通过对机床刀架的振动进行监测#并预测其振动趋势#对于有效提高机床的可靠性有很重要意义’同时对改进f T 网络规模%参数的确定#以及神经网络进行多"预测的具体实现作了有益的探索’实验中发现#多"预测模型随着预测步数的增加#误差不断累积#预测精度开始下降#但在规定的要求范围内’该改进的f T 网络还有待于更进一步的完善’总之#依照上述原理建立的f T 网络多步预测模型#全局的收敛速度快#且误差较小#对于预知机床的振动情况有一定的指导意义’参考文献54肖俊#胡伟#鲁志政等Y 数控车床故障率的可靠性可分析Y 现代制造工程#DEES *5D +D4Q "?.B #T 1(]%3.*-Y,"180‘%?0%%>‘.*">Q "^"(‘"?8[-.?j;.?>).38%a?1)0&+%?(";?.3(")_%?7)?.1(1(8Y=X X X 2?.(*./)1%(*%(,";?.3,")a _%?7*Y DEED #56*G +)5DEE [5DE664-Y 2Y @.8.(#-Y-"(0.h #2?.1(1(8+"">+%?_.?>(")_%?7*_1)0)0"-.?aj;.?>).38%?1)0&#=X X X2?.(*Y ,";?.3,")_%?7*Y 5FFJ #G *S +)FPF #FF6J4杨崴崴#缪思恩#盛锴Y 基于小波神经网络的汽轮发电机组振动故障预测的研究#电站系统工程#DEEN *G +G4k Y !;?7%^.Y !%3&%8%?%^e *)0"%?"&.(>&;3)13.#"?(";?.3(")_%?7*Y ,";a?.3(")_%?7*#5FFD *G +)GE5[GES 第一作者#黄建军$男$5FP5年生$硕士研究生$主要研究方向#数控设备工况监测与故障诊断&!编辑4孙德茂"4*收稿日期)DEEP [55[DF +44文章编号%FJDE如果您想发表对本文的看法$请将文章编号填入读者意见调查表中的相应位置&。
机械原理大作业--牛头刨床仿真分析(matlab)全自动版本

牛头刨床机构运动分析一、设计小组人员构成二、设计任务1、机构结构分析2、机构运动分析建立数学模型,解析法进行运动分析;程序编写;上机调试程序;位移、速度和加速度运动曲线图与分析;三、设计参数四、设计分工五、 设计内容如右图,建立直角坐标系,并标出各杆矢量及方位角。
利用两个封闭图形ABCA 及CDEGC ,由此可得:l 6⃑⃑⃑ +l 3⃑⃑⃑ =s 3⃑⃑⃑ , l 3⃑⃑⃑ +l 4⃑⃑⃑ =l 6′⃑⃑⃑ +S E ⃑⃑⃑⃑投影方程式为:s 3 cos θ3=l 1 cos θ1 s 3sin θ3=l 6+l 1sin θ1 l 3cos θ3+l 4cos θ4−s E =0l 3sin θ3+l 4sin θ4=l 6′有以上各式即可求得s 3 、θ3 、θ4 四个运动那个变量,二滑块2的方位角θ2=θ3。
然后,分别将上式对时间去一次、二次导数,并写成矩阵形式,即得以下速度和加速度方程式:[cos θ3−s 3sin θ3sin θ3s 3cos θ30 00 00 −l 3sin θ30l 3cos θ3−l 4sin θ4−1l 4cos θ40] [s 3ω3ω4v E ]=ω1[−l 1sin θ1l 1cos θ100][cos θ3−s 3sin θ3sin θ3s 3cos θ30 00 00 −l 3sin θ30l 3cos θ3−l 4sin θ4−1l 4cos θ40] [s 3α3α4αE ] =- [−ω3sin θ3 −s 3sin θ3−s 3ω3sin θ3ω3cos θ3 s 3cos θ3−s 3ω3sin θ30 00 00 −l 3ω3cos θ30 −l 3ω3sin θ3−l 4ω4cos θ4 0−l 4ω4sin θ4 0] [s 3ω3ω4v E ]+ ω1[−l 1ω1cos θ1−l 1ω1sin θ100]而ω2=ω3 、α2=α3 。
基于MATLAB的BP神经网络建模及系统仿真 (1)
文章编号:1001—9944(2001)01—0034—03基于M AT LAB 的BP 神经网络建模及系统仿真Ξ侯北平,卢 佩(天津轻工业学院自动化系,天津 300222)摘 要:将M A TLAB 中的神经网络工具箱和Si m ulink 有机结合起来,并充分利用它们各自的优势,实现了神经网络控制系统(NN CS )的计算机仿真。
具体仿真实例表明,M A TLAB 是进行人工神经网络计算机仿真的有效工具。
关键词:神经网络;BP 网;M A TLAB ;Si m ulink ;系统仿真中图分类号:T P 391.9 文献标识码:B1 引言控制系统的模拟和仿真是进行科学研究的重要手段。
近年来,几乎所有控制系统的高品质控制均离不开系统仿真研究。
通过仿真研究可以对照比较各种控制方案,优化并确定相关控制参量。
一般来说,对控制系统进行计算机仿真首先应建立系统模型,然后依据模型编制仿真程序,充分利用计算机对其进行动态模拟并显示结果。
对于一个闭环控制系统,我们的控制目标是它的输出曲线是一条从0开始,无限接近于给定值,且超调量极小的上升曲线,这主要是由控制器的输出决定的。
在输入偏差不断变化的情况下,设计什么样的控制器才能达到所需的控制精度和要求呢?在本文中,我们将B P 算法引入控制策略,并建立一个B P 网络模型,利用M A TLAB 中的神经网络工具箱对其进行学习和训练,根据训练出的参量构造一网络控制器,并在Si m u link 环境下组成闭环控制系统,进行系统仿真和动态模拟,观察其品质。
2 BP 网络分析及模型建立B P 网络是目前应用最广泛的神经网络模型。
它的学习规则就是通过反向传播(B P )来调整网络的权值和阈值使网络误差的平方和最小,这是通过在最速下降方向上不断调整网络的权值和阈值来实现的。
B P 网络具有强大的非线性映射能力和泛化功能,任一连续函数或映射均可采用三层网络加以实现。
这样,把它作为控制器就找到了很好的答案。
牛头刨床MATLAB运动仿真
牛头刨床机构简图二、运动方程的求解(1)对如右图所示的矢量三角形矢量方程为: .321R R R =+(*)将上述矢量方程分别向水平、竖直方向投影,得:⎩⎨⎧=+=.sin sin ;cos cos 332213322θθθθr r r r r (1-1)上式分别对时间 t 求导,得:⎪⎩⎪⎨⎧+=-=-••.cos sin cos ;sin cos sin 3333322233333222θωθθωθωθθωr r r r r r(1-2)上式写成关于3ω 、•3r 的矩阵方程,为:.cos sin sin cos cos sin 22222233333333⎪⎪⎭⎫⎝⎛-=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-•θωθωωθθθθr r r r r (1-3)将(2)式分别对时间 t 求导,得:⎪⎩⎪⎨⎧-++=----=--••••••••.sin cos cos 2sin sin cos ;cos sin sin 2cos cos sin 33233333333322222223323333333332222222θωθαθωθθωθαθωθαθωθθωθαr r r r r r r r r r r r (1-4) 上式写成关于3α 、••3r 的矩阵方程,为:一、牛头刨床机构简介:牛头刨床是一种常用的平面切削加工机床。
电动机经皮带传动、齿轮传动最后带动曲柄1(见右图)转动。
刨床工作时,是由导杆机构1-2-3-4-5带动刨头和刨刀做往复直线运动刨头5右行时,刨头切断,称为工作行程,此时要求速度较低且均匀;刨头左行时,不进行切削,称为空行程,此时速度较高,以节省时间提高生产率。
为此刨床采用有急回作用的导杆机构。
这里给出各构件的长度,以供下面的仿真使用。
.88.210,92.702,72315102.133===DE CD AB l l l.sin cos 2sin cos cos sin 2cos sin sin cos cos sin 332333322222223323333222222233333333⎪⎪⎭⎫ ⎝⎛+--++--=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-••••••θωθωθωθαθωθωθωθααθθθθr r r r r r r r r r r (1-5)(2)对如右图所示的矢量三角形矢量方程为: .7654R R R R +=+(**)将上述矢量方程分别向水平、竖直方向投影,得:⎩⎨⎧=+=+.sin sin ;cos cos 6554475544r r r r r r θθθθ (2-1)上式分别对时间 t 求导,得:⎪⎩⎪⎨⎧=+=--•.0sin cos ;sin sin 5554447555444θωθωθωθωr r r r r (2-2)将(2)式分别对时间 t 求导,得:⎪⎩⎪⎨⎧=-+-=----••.0sin cos sin cos ;cos sin cos sin 55255554424444755255554424444θωθαθωθαθωθαθωθαr r r r r r r r r (2-3)上式写成关于5α 、••7r 的矩阵方程,为:.sin sin cos cos sin 0cos 1sin 552544244444424444755555⎪⎪⎭⎫ ⎝⎛--+=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛--••θωθωθαθωθααθθr r r r r r r r (2-4)三、构建SIMULINK 方框图a) 构建速度方框图并仿真1. 首先对方程(1-3)的常变量分析:已知常量有:2ω,2r ;变量有:2θ,3θ,3ω,3r ,3•r 。
基于Matlab的牛头刨床运动学分析及通用仿真软件开发(精)
参数名称L 1L 3L 5H G 准 3P 准 5S n 1准 1转向参数含义原动件 AB 的长度从动件 DE 的长度从动件 EF 的长度 AD 的长度刨头距离底座的竖直高度从动件 DE 的转角滑块 2到底座的距离从动件 EF 的转角滑块 6的位移原动件 AB 的转速原动件 AB 的转角原动件 AB 的转向表 1模型参数含义基于 Matlab 的牛头刨床运动学分析及通用仿真软件开发吴国祥(兰州交通大学教务处, 兰州 7300701引言机构运动分析的任务是在已知机构尺寸及原动件运动规律的情况下, 确定机构中其他构件上某些点的轨迹、位移、速度、加速度和构件的角位移、角速度及角加速度。
上述这些内容, 不论是设计新的机器, 还是为了了解现有机械的运动性能, 都是十分必要的, 而且它还是研究机械动力性能的必要基础和前提 [1]。
对于牛头刨床来说,其刨刀在有效工作行程中应该接近等速运动, 而回程速度却应高于前者速度, 从而提高效率。
为了确定牛头刨床的设计是否满足要求, 就必须对其进行运动分析 [2]。
本文建立了牛头刨床的力学模型,并推导了其运动微分方程,通过数值方法求得了牛头刨床的运动学规律并开发了一款用于牛头刨床的通用运动学分析软件 [3]。
2牛头刨床的数学模型图 1所示为牛头刨床的机构简图, 模型中各参数的物理意义如表 1所示。
设已知结构参数为 :L 1、 L 3、 L 5、 G H , 原动件的转角φ1和转速 n 1。
解:如图 1, 先建立一个直角坐标系, 并标出各杆矢及其方位角。
其中有四个未知变量φ3、φ5, P 及 S 。
为求解需建立两个封闭矢量方程,为此需利用两个封闭图形 ABDA 及 DEFD 。
为求这些未知量可以通过两种方法求解。
2.1用分析力学基础知识求解(1 求准 3、ω3及α3由封闭形 ABDA 可得L 1+H =P(1分别用 i 和 j 点积上式两端, 有L 1cos 准 1=P cos 准 3H +L 1sin 准 1=P sin 准 3联解上面两式可得:准3=arctan[(H +L 1sin 准 1 /L 1cos 准 1]H =L 1cos 准 1/cos准 3式 (1 对时间 t 求导数, 注意 P 为变量, 有准觶 1L 1e t 1=准 3Pe t 3+Pe3(2可用 e 3点积上式两端以消去准觶 3,并利用矢量方程解析法, 有P 觶 =V B 2B 3=-ω1L 1sin (准 1-准 3用 e t 3点积式 (2 两端可消去 P 觶 , 并注意到 e n 1·e t 3=-e 1·e t 3,则准觶3=ω3=ω1L 1cos (准 1-准 3 /P再将式 (2 对时间 t 求导, 则有准觶 21L 1e n 1=准咬 23Pe t 3+准觶 3Pe n 3+2准觶 3P 觶 e t 3+P 咬 e t3可分别用 e 3和 e t 3点积上式两端, 以消去准咬 3和 P 咬 , 注意e n 1·e t 3=-e 1·e t3,则 -准觶 1L 1cos (准 1-准 3 =-准觶 3P +P 咬准觶 21L 1sin(准 3-准 1 =准咬 3P +2准觶 3摘要:文中建立了牛头刨床的力学模型, 基于分析力学原理推导了牛头刨床的运动微分方程。
改进的BP神经网络在机械故障诊断中的应用
(总第99期)广西轻工业GUANGXIJOURNALOFLIGHTINDUSTRY2007年2月第2期【摘要】介绍了BP神经网络的结构和学习方法,针对BP网络存在局部极小值和收敛速度慢等问题,提出采用一种基于Levenberg-Marquardt算法(LM算法)的改进BP网络,最后通过汽轮机故障诊断实例的仿真研究,结果表明改进算法的性能明显优于常规BP算法,经改进算法训练的网络能大大提高故障的在线诊断能力,具有广泛的应用前景和应用价值。
【关键词】BP神经网络;改进算法;故障诊断;Levenberg-Marquardtalgorithm;汽轮机【中图分类号】TP183【文献标识码】B【文章编号】1003-2673(2007)02-0054-03引言人工神经网络是在现代神经学研究成果的基础上发展起来的,是一种模仿人脑信息处理机制的网络系统,它是由多个具有非线性输入、输出特性的人工神经元,以某种拓扑相互连接而成的动力学系统。
它能够并行处理多种模式,具有较强的学习能力和容错性强、自适应性强以及进行联想、推测和记忆、类比等能力,广泛应用于信号处理、自动控制、故障诊断等许多领域[1,2]。
其中多层前向神经网络及其误差后传播学习算法(即BP算法)是目前在机械故障诊断领域中的特征提取和模式分类等方面应用得最成功、研究得最广泛的一种神经网络。
采用BP学习算法的人工神经网络又简称BP神经网络。
1BP神经网络简介图1是一个典型的3层BP神经网络结构图,它由输入层、隐层和输出层组成。
理论研究及实践证明:具有足够多隐层单元的三层前向网络能以任意精度逼近任何连续的映射。
BP算法的基本思想是:学习的过程由信号的正向传播与误差的逆向传播两个过程组成。
正向传播时,模式作用于输入层,经隐层处理后传向输出层。
若未能得到期望的输出,则转入误差的逆向传播将输出误差按照某种形式通过隐含层向输入层逐层返回,从而获得各层单元的参考误差(也称误差信号),作为修改各单元权值的依据。
基于Matlab的牛头刨床运动学分析及通用仿真软件开发(精)
参数名称L 1L 3L 5H G 准 3P 准 5S n 1准 1转向参数含义原动件 AB 的长度从动件 DE 的长度从动件 EF 的长度 AD 的长度刨头距离底座的竖直高度从动件 DE 的转角滑块 2到底座的距离从动件 EF 的转角滑块 6的位移原动件 AB 的转速原动件 AB 的转角原动件 AB 的转向表 1模型参数含义基于 Matlab 的牛头刨床运动学分析及通用仿真软件开发吴国祥(兰州交通大学教务处, 兰州 7300701引言机构运动分析的任务是在已知机构尺寸及原动件运动规律的情况下, 确定机构中其他构件上某些点的轨迹、位移、速度、加速度和构件的角位移、角速度及角加速度。
上述这些内容, 不论是设计新的机器, 还是为了了解现有机械的运动性能, 都是十分必要的, 而且它还是研究机械动力性能的必要基础和前提 [1]。
对于牛头刨床来说,其刨刀在有效工作行程中应该接近等速运动, 而回程速度却应高于前者速度, 从而提高效率。
为了确定牛头刨床的设计是否满足要求, 就必须对其进行运动分析 [2]。
本文建立了牛头刨床的力学模型,并推导了其运动微分方程,通过数值方法求得了牛头刨床的运动学规律并开发了一款用于牛头刨床的通用运动学分析软件 [3]。
2牛头刨床的数学模型图 1所示为牛头刨床的机构简图, 模型中各参数的物理意义如表 1所示。
设已知结构参数为 :L 1、 L 3、 L 5、 G H , 原动件的转角φ1和转速 n 1。
解:如图 1, 先建立一个直角坐标系, 并标出各杆矢及其方位角。
其中有四个未知变量φ3、φ5, P 及 S 。
为求解需建立两个封闭矢量方程,为此需利用两个封闭图形 ABDA 及 DEFD 。
为求这些未知量可以通过两种方法求解。
2.1用分析力学基础知识求解(1 求准 3、ω3及α3由封闭形 ABDA 可得L 1+H =P(1分别用 i 和 j 点积上式两端, 有L 1cos 准 1=P cos 准 3H +L 1sin 准 1=P sin 准 3联解上面两式可得:准3=arctan[(H +L 1sin 准 1 /L 1cos 准 1]H =L 1cos 准 1/cos准 3式 (1 对时间 t 求导数, 注意 P 为变量, 有准觶 1L 1e t 1=准 3Pe t 3+Pe3(2可用 e 3点积上式两端以消去准觶 3,并利用矢量方程解析法, 有P 觶 =V B 2B 3=-ω1L 1sin (准 1-准 3用 e t 3点积式 (2 两端可消去 P 觶 , 并注意到 e n 1·e t 3=-e 1·e t 3,则准觶3=ω3=ω1L 1cos (准 1-准 3 /P再将式 (2 对时间 t 求导, 则有准觶 21L 1e n 1=准咬 23Pe t 3+准觶 3Pe n 3+2准觶 3P 觶 e t 3+P 咬 e t3可分别用 e 3和 e t 3点积上式两端, 以消去准咬 3和 P 咬 , 注意e n 1·e t 3=-e 1·e t3,则 -准觶 1L 1cos (准 1-准 3 =-准觶 3P +P 咬准觶 21L 1sin(准 3-准 1 =准咬 3P +2准觶 3摘要:文中建立了牛头刨床的力学模型, 基于分析力学原理推导了牛头刨床的运动微分方程。
牛头刨床的遗传优化设计
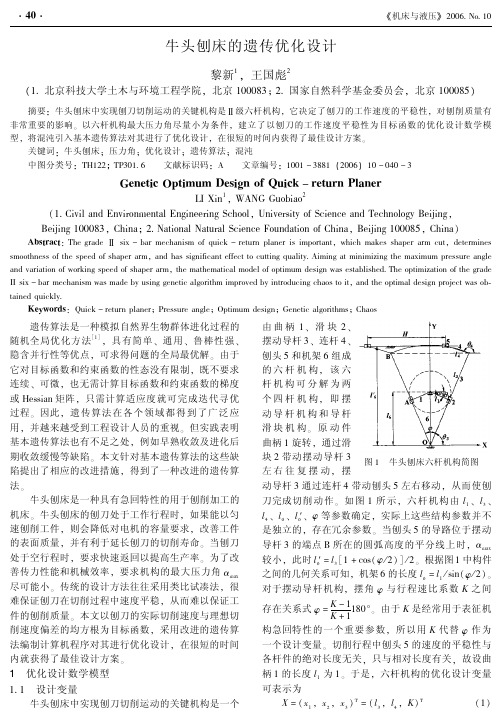
动导杆 ) 通过连杆 % 带动刨头 Z 左右移动 ! 从而使刨 刀完成切削动作" 如图 " 所示! 六杆机构由 O "% O )% O < % ’等参数确定 ! 实际上这些结构参数并不 %% O /% O / 是独立的! 存在冗余参数 " 当刨头 Z 的导路位于摆动 导杆 ) 的端点 ]所在的圆弧高度的平分线上时! % S < V 较小! 此时 O < \ O * " h A C J ’ " ! ( + " ! " 根据图 " 中构件 ’ / ) 之间的几何关系可知! 机架 / 的长度 O J 3 4’ ’ O " ! (" / \ " " 对于摆动导杆机构! 摆角 ’与行程速比系数 W之间 " W. 存在关系式 ’\ "*# A " 由于 W是经常用于表征机 " Wh 构急回特性的一个重要参数 ! 所以用 W代替 ’作为 一个设计变量 " 切削行程中刨头 Z 的速度的平稳性与 各杆件的绝对长度无关 ! 只与相对长度有关! 故设曲 柄 " 的长度 O " 为 " " 于是 ! 六杆机构的优化设计变量 可表示为
! < ) 5 &, 5 B75 H < L7; J 3 V.R< H S 7 A B< 43 J SC E TN3 A W .H 7 K NH 4 QD < 47 H 3 J3 S QC H K < 4K B3 A B S < W7 JJ B< Q7 H < H SA NK K 7 H S 3 47 J )M ! P ! L7 J S C C K B47 J J C E K B7J Q7 7 LC E J B< Q7 H < H S 4L B< J J 3 5 43 E 3 A < 4K 7 E E 7 A K K C A NK K 3 45 TN< D 3 K ; + 3 S 3 45 < K S 3 43 S 3 ‘ 3 45 K B7 S < V 3 S NSQH 7 J J NH 7 < 45 D 7 !< < 4L I < H 3 < K 3 C 4C E P C H W3 45 J Q7 7 LC E J B< Q7 H < H S B7 S < K B7 S < K 3 A < D S C L7 D C E C QK 3 S NSL7 J 3 5 4P < J 7 J K < RD 3 J B7 L+ M B7 C QK 3 S 3 ‘ < K 3 C 4C E K B7 5 H < L7 !K g g J 3 V . R< H S 7 A B< 43 J SP < J S < L7 R; NJ 3 45 5 7 47 K 3 A < D 5 C H 3 K BS3 S QH C I 7 L R; 3 4K H C LNA 3 45 A B< C J K C 3 4L K B7 C QK 3 S < D L7 J 3 5 4 QH C 6 7 A K P < J C RU K !< K < 3 47 L TN3 A WD ; + ) & &a &8 &O = # ;$ .3 ) N3 A W. H 7 K NH 4 QD < 47 H H 7 J J NH 7< 45 D 7 QK 3 S NSL7 J 3 5 4& ? 7 47 K 3 A< D 5 C H 3 K BS J B< C J
基于改进自适应遗传算法的BP神经网络模型研究
其中, t 为 0 到 1 之间的一个随机数。 模拟退火算子: 若 f(x)≥f(xl), 即父代种群中某个体 x 的适应 度值不小于子代种群中某个体 xl 的适应度值, 则 xl 替 代 当 前 种 群中的 x; 否则设定 △ = f(xl )- f(x ) T= T0 ( 0 . 99g - 1 ) prob=min(1,e-△/T)( g 为遗传代数, T 为温度, T0 为初始温度) 如 果 prob>z( z∈random(0,1) ) , 则 xl 取 代 当 前 代 中 的 x, 种 群中各个体用相同处理方法。
92
福建电脑
2007 年第 1 期
基于改进自适应遗传算法的 BP 神经网络模型研究
章义来, 冯旖旎
( 景德镇陶瓷学院 信息工程学院 江西 景德镇 333403)
【摘 要】: 针对自适应遗传算法容易陷入局部最优值的问题, 提出了改进的自适应遗传算法, 并将改进的自适应遗传算 法应用于神经网络权值学习和训练中, 提高网络的处理能力。
作为一个染色体, 每个染色体用一个浮点向量表示, 也就是说采
用 实 数 编 码 的 方 式 来 表 示 染 色 体 。实 数 编 码 方 式 具 有 微 调 功 能 ,
不存在编码和解码的过程。
3.2 参数确定及适应度函数的选择
设 定 进 化 代 数 ( g) 、种 群 规 模 、交 叉 概 率 、变 异 概 率 、网 络 层
这种实现方式基本上能够明确的反映出我们对于问题领域
的理解, 正确的揭示我们的设计意图。其实 abstract class 表示的 是"is a"关系, interface 表示的是"like a"关系, 这在选择时可以作 为一个依据, 当然这是建立在对问题领域的理解上的, 比如: 如 果我们认为 AlarmWindow 在概念本质上是报警器, 同时又具有 Window 的功能, 那么上述的定义方式就要反过来了。
基于改进BP神经网络的结构可靠度计算方法
Manuscript received 20200724ꎬ in revised form 20200925.
效果具有一定的局限性ꎮ
到充分的训练ꎬ导致代理模型的拟合精度不足、计算效
进行优化ꎮ
MEA 是在 GA 群体进化思想的基础上ꎬ模仿人类
化” ꎬ从而有效的解决 GA 早熟和收敛较慢等问题 [14] ꎮ
根据 BP 神经网络的拓扑结构ꎬ将解空间映射到
基于此ꎬ本文引入思维进化算法( MEA) 优化 BP
编码空间ꎬ每个编码对应优化的一个解ꎬ选取训练误差
为权值衰减项ꎻ w i 为神经网络连接权值ꎮ
BR 算法以式( 5) 作为性能函数ꎬ在训练过程中
将 α、β 作为随机变量ꎬ自适应的调节 α、β 的大小ꎬ在
保证训练误 差 收 敛 于 目 标 误 差 的 条 件 下ꎬ输 出 最 终
的权值和阈值ꎬ并以此建立 MEA ̄BR ̄BP 神经网络代
理模型ꎮ
1 3 结构可靠性分析
型ꎬ其中 BP 神经网络因具有强大的非线性拟合能力
和广泛 的 适 用 性ꎬ 得 到 了 大 量 的 工 程 应 用ꎮ Zou H
等 [7] 分别用线性 BP 神经网络与非线性 BP 神经网络
拟合转向架构架的载荷 ̄应力关系ꎬ建立了构架载荷 ̄
应力系数优化模型ꎮ Lv H 等 [8] 运用 BP 神经网络代理
最优初始值的网络进行训练ꎬ提出一种基于 MEA ̄BR ̄
趋同和异化操作不断迭代ꎬ输出最优的个体ꎬ以此作为
神经网络的初始权值和阈值ꎬ并利用 BR 算法对获取
基于改进BP神经网络的机床基础部件可再制造性评价模型
基于改进BP神经网络的机床基础部件可再制造性评价模型潘尚峰;卢超;彭一波【摘要】To utilize sample data to accomplish the remanufacturability evaluation of the machine tool basic parts,and to improve the prediction accuracy of remanufacturability evaluation of the ma-chine tool basic parts,a BP neural network remanufacturability evaluation model optimized by the simulated annealing algorithm and genetic algorithm was proposed.A BP neural network remanufac-turability evaluation prediction model of the machine tool basic parts was built according to the evalua-tion results of typical remanufacturability evaluation model.The BP neural network evaluation model optimized by the simulated annealing algorithm and genetic algorithm has better initial weights and thresholds to increase the convergence rate and avoid the local convergence.Remanufacturability eval-uation of a machine tool basic parts was taken as an example to demonstrate that the remanufactur-ability evaluation model optimized by simulated annealing algorithm and genetic algorithm has higher prediction accuracy.%为了利用样本数据准确完成机床基础部件可再制造性评价,提高机床基础部件可再制造性评价预测精度,提出一种采用模拟退火遗传算法优化BP神经网络的机床基础部件可再制造性评价模型。
基于matlab实现BP神经网络模型仿真

基于BP神经网络模型及改进模型对全国历年车祸次数预测一、背景我国今年来随着经济的发展,汽车需求量不断地增加,所以全国每年的车祸次数也被越来越被关注,本文首先搜集全国历年车祸次数,接着通过这些数据利用BP神经网络模型和改进的径向基函数网络进行预测,最后根据预测结果,分析模型的优劣,从而达到深刻理解BP神经网络和径向基函数网络的原理及应用。
所用到的数据即全国历年车祸次数来自中国汽车工业信息网,网址如下:/autoinfo_cn/cszh/gljt/qt/webinfo/2006/05/124650 1820021204.htm制作历年全国道路交通事故统计表如下所示:二、问题研究(一)研究方向(1)通过数据利用BP神经网络模型预测历年全国交通事故次数并与实际值进行比较。
(2)分析BP神经网络模型改变训练函数再进行仿真与之前结果进行对比。
(3)从泛化能力和稳定性等方面分析BP神经网络模型的优劣。
(4)利用径向基函数网络模型进行仿真,得到结果与采用BP神经网络模型得到的结果进行比较。
(二)相关知识(1)人工神经网络人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。
在工程与学术界也常直接简称为神经网络或类神经网络。
神经网络是一种运算模型,由大量的节点(或称神经元)和之间相互联接构成。
每个节点代表一种特定的输出函数,称为激励函数(activation function)。
每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。
网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。
而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达。
人工神经网络有以下几个特征:(1)非线性非线性关系是自然界的普遍特性。
大脑的智慧就是一种非线性现象。
人工神经元处于激活或抑制二种不同的状态,这种行为在数学上表现为一种非线性网络关系。
具有阈值的神经元构成的网络具有更好的性能,可以提高容错性和存储容量。
一种改进的BP神经网络入侵检测方法的设计与实现
一种基于改进BP神经网络的入侵检测算法的设计与实现李勤朴何立夫国网湖南省电力公司防灾减灾中心,湖南长沙,410129,摘要:针对传统BP神经网络入侵检测算法学习效率低、收敛速度慢的缺点,本文提出了一种改进型的BP神经网络入侵检测算法,并进行了系统原型的设计。
仿真实验结果表明:改进型的算法比传统型的算法具有更快的学习速度和更准确的报警率,实验结果令人满意。
关键词:网络安全;入侵检测;神经网络;BP算法The Design and Implementation of an Intrusion Detection Algorithm Based on Improved BP Neural NetworkLi Qinpu He LifuState Grid Hunan Electric power corporation disaster prevention & reduction center,changsha, 410129, ChinaAbstract:Aiming at the shortcomings of low learning efficiency and slow convergence speed of intrusion detection algorithm based on traditional BP neural network, this paper presents an improved intrusion detection algorithm based on improved BP neural network, and designs the system prototype. The simulation results show that the improved algorithm has faster learning speed and more accurate alarm rate than the traditional algorithm. And the results of the experiment were satisfactory.Key words:Network security; Intrusion detection; Neural network; BP algorithm随着互联网技术的快速发展,因特网应用的广泛普及,随之而来的信息泄漏、信息窃取、数据篡改、数据删添、计算机病毒等黑客事件不断出现,网络安全问题日显突出。
面向加工中心床身的改进BP神经网络优化系统
面向加工中心床身的改进BP神经网络优化系统刘斯妤;史安娜;曹富荣;马晓波【摘要】针对加工中心的动态特性直接影响整机的加工精度等问题,面向i5系列M4.5智能机床的动态特性需求,采用动态优化的原理,对机床的基础部件床身建立一种优化系统;该系统由需求分析、系统设计和智能优化模块组成.在传统的系统设计基础上,采用灵敏度分析,结合改进神经网络和遗传算法(BP-GA法)对床身进行多目标结构优化,从而提高加工中心的智能水平.结果表明,优化后的床身动态特性得到提高,为机床的优化提供了有效的理论依据.【期刊名称】《沈阳理工大学学报》【年(卷),期】2018(037)003【总页数】5页(P59-62,94)【关键词】加工中心;动态优化;灵敏度分析;BP-GA算法【作者】刘斯妤;史安娜;曹富荣;马晓波【作者单位】沈阳理工大学机械工程学院,沈阳110159;沈阳理工大学机械工程学院,沈阳110159;沈阳理工大学机械工程学院,沈阳110159;沈阳机床集团,沈阳110142【正文语种】中文【中图分类】TH122;TG65智能机床的高速发展对机床提出了越来越高的要求,机床床身的进给系统为工件加工提供往复移动的作用,因此其动态特性对整机的加工精度影响很大[1-3]。
采用有效的方法对机床的进给系统进行优化,对智能机床加工精度的提高有重要意义。
结构的优化设计可以归结为一个轻量化问题,通常以结构的质量为目标,结构的动静态特性为约束条件,对质量的最小化进行寻优。
文献[4]建立了机床的动态模型并基于结合面进行了拓扑优化。
文献[5]对机床进行了轻量化设计,并通过改变筋板的布局进行尺寸优化。
文献[6]对加工中心的横梁进行了优化设计,在分析出薄弱部位的同时,对进给机构中重力、外力的作用以及轴承部位热的作用进行考虑。
当今学者对机床进给机构的研究,通常没有考虑进给机构结合面的刚度作用,难以准确获得性能最优的结构优化方案。
本文以智能机床i5系列M4.5机床的床身进给系统为研究对象,在充分考虑其结合面特性的基础上,建立多软件的协同优化平台,形成一个智能机床进给系统的遗传算法和神经网络优化系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!!牛头刨床在运动过程中&刨头作直线往复运动 是主要运动*!+)此运动行程分为两个阶段$& 刨头切 削工件的进给运动!' 刨头切完工件的回程运动)牛 头刨床的刨头速度若控制不当&不仅影响工件的质 量&而且会降低工作效率*#+)因此&必须对牛头刨床 六杆机构进行优化&尽可能保证刨头速度平稳切削
和快速返程&从而提高工件产品的质量和效率)
为了改善牛头刨床刨头的切削速度&以往许多
研究人员对其进行了大量研究)文献*3+采用 G9C(9-. ]Oa优化牛头刨床运动参数尺寸&并且对优化结果 进行了仿真)以提高工作效率为目标函数&建立了牛 头刨床机构行程比的数学模型&采用 G9C(9-.]Oa和 Q语言程序对优化结果进行仿真验证)仿真结果显 示&牛头刨床空行程时间减少了3#[)文献*E+采用
基金项目$河南省自然科学基金资助项目"#$!3/E"$$#E# 作者简介$王!莹"!4%3%#&女&硕士)6789:($U<JJ#$!5$.!!"3)>'8
!第!期
王!莹&等$基于改进 /T神经网络优化的牛头刨床动力学仿真
!3!!
动力学软件 010GN对优化后的牛头刨床进行动力 学仿真研究&建立了刨头速度目标函数&添加了约束 条件&采用 G9C(9-软件对其进行优化&得出最优杆
关键词$牛头刨床!六杆机构!改进 /T神经网络!优化!仿真 中图分类号$KL!!3!!!!文献标志码$0!!!!文章编号$!"5#M..%!"#$!%#$!M$$3$M$.
I0,"(#.+#(%$"/#),)-+2"3'&6"+'*),#(3&)>'* FB,'%&"$,'/8)&H
T6#7$-'/!&,"$&'/D&'/!&,"O8)'/;-'#
56+/&"./$0:8:=B9CC@,RF'-(,8C@9CC@,><CC:=B;R,,H:;='C;8''C@&C@,:8RF'P,H/T=,<F9(=,CW'FS:; <;,HC''RC:8:?,C@,;:U-9F8,>@9=:;8)K@,S:=,89C:>;S,C>@8'H,('I;:U-9F8,>@9=:;8:;,;C9-(:;@,H& 9=HC@,HJ=98:>,A<9C:'='IC@,@,9H:;H,F:P,H)K@,'-D,>C:P,I<=>C:'='IC@,;:U-9F 8,>@9=:;8:; >'=;CF<>C,H&9=HC@,R9F98,C,F;'IC@,;:U-9F 8,>@9=:;8 9F,'RC:8:?,H-JC@,:8RF'P,H /T =,<F9( =,CW'FS)K@,'RC:8:?,HR9F98,C,F;W,F,:8R'FC,H:=C'C@,N'(:HW'FS;;'ICW9F,C',;C9-(:;@C@,C@F,,7 H:8,=;:'=9(8'H,(&9=HC@,HJ=98:>;:8<(9C:'=W9;>9FF:,H'<C)K@,;:8<(9C:'=F,;<(C;;@'WC@9C>'8R9F,H W:C@-,I'F,'RC:8:?9C:'=&9IC,F'RC:8:?9C:'='IC@,;@9R,F&='C'=(J,UC,=HC@,R('<B@W'FS:=BC:8,&9=H C@,P,('>:CJ9=H9>>,(,F9C:'=:=C@,RF'>,;;'IW'FS:=B;CF'S,"$)37$)%;#8'P,8,=C:;F,(9C:P,(J;C9-(,&C@, 98R(:C<H,'IC@,P:-F9C:'=;@9R,FH,>F,9;,H)K@,:8RF'P,H/T=,<F9(=,CW'FS:;<;,HC''RC:8:?,C@,;:U -9F8,>@9=:;8&W@:>@>9=:8RF'P,C@,,II:>:,=>J9=H;C9-:(:CJ'IC@,><CC:=B@,9H) 7'08)&*+$;@9R,F!;:U-9F8,>@9=:;8!:8RF'P,H/T=,<F9(=,CW'FS!'RC:8:?9C:'=!;:8<(9C:'=
长度!.I8为摆动杆I8 的长度!.IA为连杆I8 的长 度!.AO 为刨头运动的位移)
$# 和$3 的关系式如下$
长)优化后的牛头刨床刨头切削速度更加平稳&加速 度峰值得到了降低)文献*.+研究了牛头刨床刨头的
(9F>C9=.28=;:=$!& >';$!
H
% #
3$!
3
% #
运动精度&探讨了不完全概率信息牛头刨床刨头稳 健设计问题)分析了六杆机构运动的几何约束条件&
"!)N>@''('IG,>@9=:>9(9=H6(,>CF:>9(6=B:=,,F:=B&2@,=B?@'<O=:P,F;:CJ'Ia=H<;CF:9(K,>@='('BJ&2@,=B?@'<E.!!.$&Q@:=9! #)N>@''('IG,>@9=:>9(9=H6(,>CF:>9(6=B:=,,F:=B&L,==O=:P,F;:CJ'IK,>@='('BJ&2@,=B?@'<E.$$$5&Q@:=9#
第!"卷第!期 #$!%年#月
中!国!工!程!机!械!学!报 !"#$%&%'()*$+,(-!($&.*)!.#($ /+!"#$%*0
&'()!"*')! !+,-)#$!%
基于改进 FB 神经网络优化的牛头刨床动力学仿真
王!莹!许洋洋!薛东彬#
"!)郑州工业应用技术学院 机电工程学院&郑州 E.!!.$!#)河南工业大学 机电工程学院&郑州 E.$$$5#
摘要$针对牛头刨床刨头切削速度不平稳问题&采取改进 /T神经网络对六杆机构进行优化)建立牛头刨床六杆 机构运动简图模型&推导出刨头动力学方程式)构造六杆机构运动参数优化目标函数&采用改进 /T神经网络对 六杆机构约束参数进行优化)将优化后的参数导入到N'(:HW'FS;软件中建立三维模型&并且进行动力学仿真)仿 真结果显示&与优化前相比&优化后的牛头刨床&不仅延长了刨头的工作时间&而且在工作行程过程中&速度和加 速度"$)3"$)%;#运动较为平稳&牛头刨床振动幅度降低)采用改进 /T神经网络优化牛头刨床六杆机构&可以 提高刨头工作效率和切削的稳定性)