矩阵函数的求法
矩阵幂和矩阵指数函数的计算方法
矩阵幂和矩阵指数函数的计算方法矩阵幂和矩阵指数函数是矩阵运算中比较重要的两个概念。
在矩阵幂和矩阵指数函数的计算过程中,我们需要用到一些特殊的算法和方法。
本文将介绍矩阵幂和矩阵指数函数的概念、计算方法和应用等方面的内容,帮助读者更好地了解和掌握这两个概念。
一、矩阵幂的概念对于一个$n$阶矩阵$A$,设$k$为一个自然数,则$A^k$表示$k$次幂。
即:$A^k=\underbrace{A \times A \times \cdots \times A}_{k\text{个} A}$其中,当$k=0$时,$A^k$等于$n$阶单位矩阵$I_n$。
矩阵幂的计算过程中,我们需要用到矩阵乘法的定义。
对于两个$n$阶矩阵$A$和$B$,它们的乘积$AB$定义为:$AB=[c_{ij}]=\sum_{k=1}^na_{ik}b_{kj}$其中,$c_{ij}$表示矩阵的第$i$行第$j$列的元素,$a_{ik}$和$b_{kj}$分别表示第$i$行第$k$列的元素和第$k$行第$j$列的元素。
二、矩阵幂的计算方法矩阵幂的计算方法有两种:直接幂法和快速幂法。
1. 直接幂法直接幂法是一种比较简单的计算矩阵幂的方法。
对于一个$n$阶矩阵$A$和一个自然数$k$,我们可以通过$k-1$次连乘的方式计算出$A^k$的值。
即:$A^k=\underbrace{A \times A \times \cdots \times A}_{k-1\text{个} A} \times A$由此可见,计算矩阵幂的直接幂法需要进行$k-1$次矩阵乘法运算,时间复杂度为$O(kn^3)$。
2. 快速幂法快速幂法是计算矩阵幂的高效方法,它能够有效地减少运算次数,提高计算效率。
该方法基于指数的二进制表示,通过不断地平方和乘以相应的权值,最终计算出矩阵幂的值。
具体步骤如下:(1)将指数$k$转换成二进制数,例如,$k=13$转换成二进制数为$1101$。
矩阵函数
0 0 0 0 0 , A 0 1 0
5
(c) 对角形法 假设A可对角化,即存在非奇异矩阵P,使得 l1 , P 1 AP ln 则
f (l1 ) P 1 . f ( A) P f ( ln )
4 6 0 例3 设 A 3 5 0 , 求eA,etA和cosA。 3 6 1
6
(d) Jordan标准型法 一般的,设A的Jordan标准型为J,即存在非奇异 矩阵P,使得
J1 P 1 AP J , Js
则
f ( J1 ) 1 P . f ( A) P f ( J s )
7
f ( A) ck Ak .
例如:
1 1 k e I A A , 1! k! 1 3 1 2 sin A A A , cos A I A 3! 2A=cosA+isinA; (2) cosA=(eiA+e-iA)/2; (3) sinA=(eiA-e-iA)/(2i); (4) cos(-A)=cosA,sin(-A)=sinA; (5) eAe-A=e-AeA=I,(eA)-1=e-A; (6) (eA)m=emA; (7) 一般的,eAeB≠eA+B;如 A 1 1 , B 1 1 . 0 0 0 0
(b) 数项级数求和法 给定A后,确定首1多项式g(l),满足g(A)=0。(特 征多项式或最小多项式均可) Am b1 Am 1 bm 1 A bm I 0. 这表明Am可以用Am-1,…,I线性表出。 A的更高次幂也可以用Am-1,…,I线性表出。
用C语言求解N阶线性矩阵方程Axb的简单解法
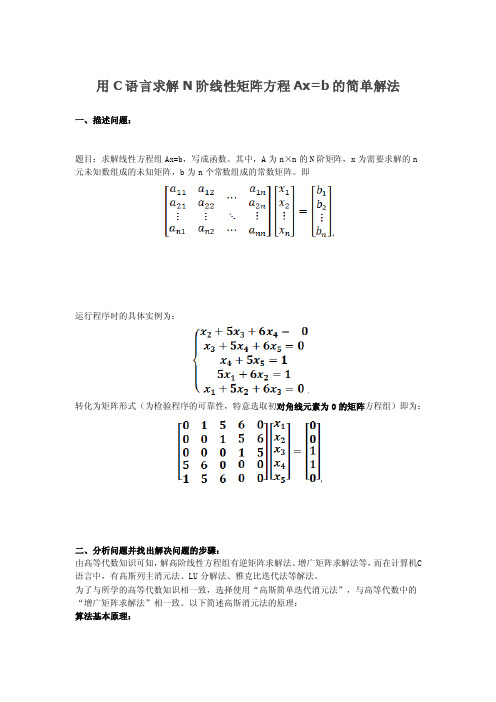
用C语言求解N阶线性矩阵方程Ax=b的简单解法一、描述问题:题目:求解线性方程组Ax=b,写成函数。
其中,A为n×n的N阶矩阵,x为需要求解的n 元未知数组成的未知矩阵,b为n个常数组成的常数矩阵。
即运行程序时的具体实例为:转化为矩阵形式(为检验程序的可靠性,特意选取初对角线元素为0的矩阵方程组)即为:二、分析问题并找出解决问题的步骤:由高等代数知识可知,解高阶线性方程组有逆矩阵求解法、增广矩阵求解法等,而在计算机C 语言中,有高斯列主消元法、LU分解法、雅克比迭代法等解法。
为了与所学的高等代数知识相一致,选择使用“高斯简单迭代消元法”,与高等代数中的“增广矩阵求解法”相一致。
以下简述高斯消元法的原理:算法基本原理:首先,为了能够求解N阶线性方程组(N由用户输入),所以需要定义一个大于N维的数组a[dim+1][dim+1](dim为设定的最大维数,防止计算量溢出),当用户输入的阶数N超过设定值时提示重启程序重新输入。
进而,要判断方程组是否有解,无解提示重启程序重新输入,有解的话要判断是有无数不定解还是只有唯一一组解,在计算中,只有当原方程组有且只有一组解时算法才有意义,而运用高等代数的知识,只有当系数矩阵对应的行列式|A|≠0 时,原方程组才有唯一解,所以输入系数矩阵后要计算该系数矩阵的行列式 |A|(定义了get resul t(n)函数计算),当行列式 |A|=0 时同样应提示重启程序重新输入,|A|≠0 时原方程组必然有且仅有唯一一组解。
判断出方程组有且仅有唯一一组解后,开始将系数矩阵和常数矩阵(合并即为增广矩阵)进行初等行变换(以a11 为基元开始,将第j列上j行以下的所有元素化为0),使系数矩阵转化为上三角矩阵。
现代控制理论 矩阵指数函数的计算方法PDF版
《现代控制理论》MOOC课程第二章系统状态空间表达式的解三. 矩阵指数函数的计算方法根据矩阵指数函数的定义:方法一e At=I+At+12!A2t2+⋯=k=0∞1k!A k t k直接计算。
方法二将A阵化为对角标准型或约当标准型求解1. A的特征值不存在重根若A的n个特征值不存在重根,则在求出使A阵实现对角化λ1,λ2,⋯,λnT−1AT=λ1λ2⋱λn的变换阵后,即有指数函数矩阵:T−1、T e At=T eλ1teλ2t⋱eλn tT−1证明:T −1AT=λ1λ2⋱λn 由可得A =Tλ1λ2⋱λnT −1eAt=k=0∞1k!A k t k =k=0∞1k!Tλ1λ2⋱λnT−1kt k=k=0∞1k!Tλ1λ2⋱λnkT −1t k=Tk=0∞1k!λ1k tk k=0∞1k!λ2k tk ⋱k=0∞1k!λn k tk T −1=Te λ1te λ2t⋱e λn tT −1得证2. A的特征值存在重根若A的l组不同特征值为:λ1,λ2,⋯,λl,代数重数分别为σ1,σ2,⋯,σl(σ1+σ2+⋯+σl=n)且几何重数均为1,则在求出使A阵为约当标准型:J=T−1AT=J1J2⋱J l其中J i=λi1λi⋱⋱1λi为维矩阵σi×σi的变换阵后,即有指数函数矩阵:T−1、Te At=T e J1te J2t⋱e J l tT−1其中e J i t=eλi t1t12!t2⋯1(σi−1)!tσi−101t⋯1(σi−2)!tσi−2⋮⋮⋮⋯⋯⋯⋮t1证明:证明的思路与1相同,略去。
拉氏变换法:方法三e At =L −1(sI −A)−1证明:由矩阵指数函数的定义:e At=I +At +12!A 2t 2+⋯=k=0∞1k!A k tk取拉氏变换L(e At )=1s I +1s 2A +1s 3A 2+⋯=k=0∞1s(k+1)A k =s −1k=0∞s −1Ak =s −1I −s −1A−1=sI −A−1取拉氏反变换e At =L −1(sI −A)−1得证L t k k!=1sk+11+x +x 2+⋯+x k+⋯=k=0∞x k=11−x =(1−x)−1方法四应用凯莱-哈迷尔顿定理将表示为一个多项式e At e At =a 0t I +a 1t A +a 2t A 2+⋯+a n−1t A n−1若A 的特征值两两互异,则多项式的系数可按下式计算:a 0t a 1t ⋮a n−1t=1λ1λ12⋯λ1n−11λ2λ22⋯λ2n−1⋮1⋮λn⋮λn2⋮⋯⋮λnn−1−1e λ1te λ2t ⋮e λn tλ1,λ2,⋯,λl 若A 的n 个特征值为:,代数重数分别为,几何重数均为1,σ1,σ2,⋯,σl a 0t ⋮a σ1t ⋮a (σk=1l−1σk )+1t⋮a n−1t=p 1σ1⋮p 11⋮p lσl ⋮p l1−11σ1−1!t σ1−1e λ1t⋮e λ1t ⋮1σl −1!t σl −1e λl t⋮e λl t式中p i1=1λi λi 2⋯λin−1p i2=dp i1dλi ⋮p iσi =1σi −1!d σi −1p i1dλiσi −1凯莱-哈迷尔顿定理A∈R n×n设, 其特征多项式为:Dλ=λI−A=λn+a n−1λn−1+⋯+a1λ+a0=0则矩阵A必满足其特征多项式,即A n+a n−1A n−1+⋯+a1A+a0I=0证明:由凯莱-哈迷尔顿定理可表示为的线性组合,即A n−1、A n−2、⋯、A 、I A n A n =−a n−1A n−1−⋯−a 1A −a 0I进而有:A n+1=AA n =A(−a n−1A n−1−⋯−a 1A −a 0I)=−a n−1A n −a n−2A n−1−⋯−a 1A 2−a 0A=−a n−1(−a n−1A n−1−⋯−a 1A −a 0I)−a n−2A n−1−⋯−a 1A 2−a 0A=(a n−12−a n−2)A n−1+(a n−1a n−2−a n−3)A n−3+⋯+a n−1a 1−a 0A +a n−1a 0I这样均可表示为的线性组合。
矩阵微分(变分)法
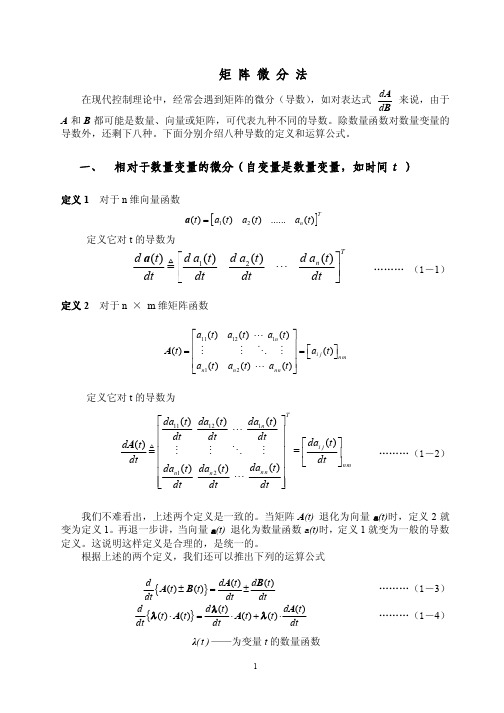
a12 (t) M
L a1n (t) OM
ù ú ú
=
éëai j (t)ùûnm
an2 (t) L ann (t)úû
定义它对 t 的导数为
dA(t)
é ê ê
da11 (t dt
)
dt
@ê M
ê ê
dan1
(t
)
êë dt
da12 (t) dt
L
da1n (t) dt
ùT ú ú
M O Mú
dan2 (t) dt
( ) X = AT AAT -1 b
7
( ) 再由
d dX T
é dF ( X
ê ë
dX
)ù
ú û
=
d dX T
2 X + AT l
= 2I > 0
可知所得的解是最小范数解。
=
éêa1T ê
(t )b1 (t ) M
L O
a1T
(t
)bl M
(t
)
ù ú ú
=
éëaiT
(t) × bj (t)ùûnl
êëanT (t)b1(t) L anT (t)bl (t)úû
从而根据矩阵导数定义 2,有
d dt
[
A(t) ×
B(t)]
=
d dt
éëaiT
(t) × bj
(t ) ùû n l
(t M
)
ù ú ú
êëan1(t) an2 (t) L anm (t)úû
êëanT (t)úû
B(t) = éêêb11M(t)
b12 (t) M
L O
b1l (t) M
矩阵微积分规则
矩阵微积分规则摘要:1.矩阵微积分的概念与基本原理2.矩阵微积分的运算方法3.矩阵微积分在实际问题中的应用正文:矩阵微积分是一种应用于多元函数微分和线性变换的数学工具,它是微积分学在向量空间和矩阵运算中的拓展。
矩阵微积分不仅具有传统微积分的基本原理,还具有独特的运算方法和应用领域。
一、矩阵微积分的概念与基本原理矩阵微积分的概念来源于矩阵运算与多元函数微分的结合。
矩阵微积分的基本原理包括以下几个方面:1.矩阵的导数:设A 是一个m×n 矩阵,其元素为aij,那么A 的导数是一个同样大小的矩阵,记作A"。
A"的元素为a"ij=aij/xk,其中k 为变量。
2.矩阵的梯度:矩阵的梯度是矩阵导数的特例,表示一个标量函数在向量空间中的梯度。
设f(A) 为矩阵A 的某个函数,那么矩阵A 的梯度是一个列向量,其元素为f"(A)·A",其中f"(A) 表示函数f(A) 的梯度。
3.矩阵的链式法则:矩阵微积分的链式法则与传统微积分的链式法则类似,表示复合函数的导数。
设f(A) 和g(A) 是两个矩阵函数,那么(f(g(A)))"=f"(g(A))·g"(A)。
二、矩阵微积分的运算方法矩阵微积分的运算方法主要包括以下几个方面:1.矩阵乘法:矩阵乘法是矩阵微积分的基础运算,表示两个矩阵之间的乘积。
设A 和B 是两个m×n 矩阵,那么AB 是一个m×n 矩阵,其元素为(AB)ij=aik·bkj。
2.矩阵求导:矩阵求导是矩阵微积分的关键运算,表示矩阵元素的导数。
根据矩阵导数的定义,可以求得任意矩阵A 的导数A"。
3.矩阵求梯度:矩阵求梯度是矩阵微积分的另一个重要运算,表示标量函数在向量空间中的梯度。
根据矩阵梯度的定义,可以求得任意矩阵A 的梯度。
三、矩阵微积分在实际问题中的应用矩阵微积分在实际问题中有广泛的应用,例如在线性代数、优化理论、机器学习等领域。
矩阵exp(at)的扑策计算公式及其应用
矩阵exp(at)的扑策计算公式及其应用
矩阵exp(at)表示将矩阵at求指数函数,即
exp(at)=∑n=0∞(at)n/n!。
但是直接使用该公式计算往往需要大量时间和计算资源。
为了更高效地计算矩阵指数函数,可以采用扑策计算公式。
扑策(Pade)方法是一种常见的有理逼近技术,它通过选取合适的函数,用有理函数最小二乘逼近原函数,从而减少计算量。
扑策逼近公式可以表示为f(x)≈R(x)=P(x)/Q(x),其中P(x)和Q(x)为两个多项式,且P(x)和Q(x)的次数不超过k。
扑策计算矩阵指数函数的公式为Rm,n(tA)=Pm,n(tA)[Qm,n(tA)]^-1,其中A表示待求矩阵,t为实数,m和n为多项式次数,Pm,n(x)和Qm,n(x)分别为多项式序列。
当m=n时,该公式被称为扑策逼近阶数为m的矩阵指数函数。
扑策方法的优点在于,随着逼近次数的增加,逼近精度可以显著提高,同时也可以将计算复杂度降低到O(k^3)。
扑策计算矩阵指数函数的应用很广泛,例如可以用于求解常微分方程组、线性系统的解、以及量子力学中的时间演化算符等问题。
总之,扑策计算矩阵指数函数是一种高效、精确的计算方法,具有广泛的应用前景。
使用矩阵函数方法求解矩阵方程
要使用矩阵函数方法求解矩阵方程,您需要首先确定所给方程的形式,然后选择适当的矩阵函数来解决它。
以下是一些常见的矩阵方程以及相应的解决方法:
1. **线性方程Ax = b**,其中A 和b 是已知的矩阵和向量。
要求解x,可以使用逆矩阵方法:
```
x = A^(-1) * b
```
其中A^(-1) 表示A 的逆矩阵。
请注意,前提是A 必须是可逆的。
2. **特征值方程A*x = λ*x**,其中A 是已知的矩阵,λ是特征值,x 是特征向量。
要找到特征值和特征向量,可以使用矩阵的特征值分解。
3. **矩阵微分方程dX/dt = A*X**,其中X 是未知的矩阵函数,A 是已知的矩阵。
要解这个方程,可以使用矩阵指数函数。
```
X(t) = e^(A*t) * X(0)
```
其中e^(A*t) 是矩阵A 的指数函数,X(0) 是初始条件。
4. **矩阵常微分方程组**:对于包含多个未知矩阵函数的矩阵常微分方程组,可以使用类似的方法来求解,通常涉及到矩阵指数函数和矩阵常数。
这只是一些基本的例子,实际问题可能会更复杂。
对于具体的矩阵方程,您需要了解所涉及的矩阵性质和相关数学方法,以选择合适的解决方法。
如果您面临特定问题,可以提供更多的上下文信息,我可以提供更具体的帮助。
用矩阵函数方法求微分方程
用矩阵函数方法求微分方程微分方程是自然科学和工程学科中经常遇到的问题,求解微分方程的方法有很多种,其中一种是使用矩阵函数的方法。
在这篇文章中,我们将介绍如何使用矩阵函数来求解微分方程,并通过一个具体的例子来说明此方法的应用。
矩阵函数的方法是一种求解常微分方程组的有效方法,它将微分方程组转化为矩阵的形式,然后通过对矩阵求解其特征值和特征向量来得到微分方程组的解。
首先,让我们考虑一个一阶线性微分方程组的例子:(1) dx/dt = Ax其中x是一个n维向量,A是一个n×n矩阵。
我们可以将该微分方程组表示为矩阵形式:(2) dX/dt = AX其中X是一个n×n矩阵,A是一个n×n矩阵。
为了求解这个微分方程组,我们首先将X和A分解为特征值和特征向量的形式:(3)A=PDP^-1其中D是一个对角矩阵,其对角线上的元素是矩阵A的特征值,P是一个矩阵,其列向量是矩阵A的特征向量。
将方程(3)代入方程(2)中,得到:(4) dX/dt = PDP^-1X我们令Y=P^-1X,那么方程(4)可以进一步转化为:(5) dY/dt = DY这是一个非常简单的微分方程组(6)Y(t)=e^(Dt)Y(0)其中e^(Dt)是一个对角矩阵,其对角线上的元素是特征值e^λt,Y(0)是初始条件。
最后,我们将Y(t)代入方程(5)得到X(t):(7)X(t)=Pe^(Dt)Y(0)综上所述,我们使用矩阵函数的方法求解微分方程组的步骤如下:首先,将微分方程组表示为矩阵形式;然后,求解矩阵的特征值和特征向量;最后,将特征值和特征向量代入矩阵函数公式中求解微分方程组的解。
通过以上的介绍,我们可以看出矩阵函数的方法是一种求解微分方程组的非常有效的方法,它利用了矩阵的特征值和特征向量的性质来简化微分方程组的求解过程。
在实际应用中,我们可以通过计算机编程来实现矩阵函数的方法,以求解复杂的微分方程组。
总之,矩阵函数的方法是一种求解微分方程组的重要方法,它可以简化求解过程并得到准确的解。
待定系数法求矩阵函数
待定系数法求矩阵函数
待定系数法是一种求解矩阵函数的方法。
它的基本思路是假设矩阵函数为一个待定系数矩阵的线性组合,通过将该矩阵函数代入特定的方程或条件中,再通过求解待定系数来确定矩阵函数的具体形式。
下面以一个具体的例子来说明待定系数法的运用。
假设我们要求解矩阵函数f(A),其中A是一个n×n的矩阵。
我们假设f(A)的形式为f(A) = c₁A + c₂A² + c₃A³ + ... + cₖAᵏ。
为了确定待定系数c₁、c₂、c₃、...、cₖ的具体值,我们可以通过以下步骤进行求解:
1. 选择合适的线性独立的矩阵A₁、A₂、A₃、...、Aₖ作为基,这些矩阵的阶数可能与A相同,也可能比A低。
这些基矩阵
的选择一般可以根据问题的具体要求来确定。
2. 代入基矩阵到矩阵函数f(A)中,得到一个由待定系数c₁、
c₂、c₃、...、cₖ组成的线性方程组。
例如,对于每个基矩阵
Aᵢ,我们可以得到一个方程f(Aᵢ) = c₁Aᵢ + c₂Aᵢ² + c₃Aᵢ³ + ... + cₖAᵢᵏ = Bᵢ,其中Bᵢ是已知的。
3. 解线性方程组,求解待定系数c₁、c₂、c₃、...、cₖ的值。
这可以通过矩阵的求逆、高斯消元等方法来实现。
4. 将求解得到的待定系数c₁、c₂、c₃、...、cₖ代入矩阵函数
f(A)的表达式中,得到矩阵函数的具体形式。
需要注意的是,待定系数法只是一种求解矩阵函数的方法之一,它的适用范围有限。
在实际问题中,我们需要根据具体的条件和要求选择合适的求解方法。
函数矩阵e^(ax)公式求法
函数矩阵e^(ax)公式求法函数求和公式有一、区域求和sum函数公式:=sum()sum函数适合用于区域求和,在需要求和的单元格中输入:=sum(b2:e2)二、快速求和公式:alt+=alt+=可以实现快速求和,方法也非常的简单,选中要求和的区域,直接单击“alt+=”就可以了(记得预留一行一列来获取求和的结果)三、合并单元格求和公式:=sum(c2:c11)-sum(d3:d11)四、条件求和公式:=sumif(b2:b11,"\ue60")求出销量大于60的总和五、指定区域求和公式:sum(区域1,区域2)补足内容:函数议和公式存有于excel表,excel就是一款免费的办公软件。
microsoftexcel是microsoft为使用windows和applemacintosh操作系统的电脑编写的一款电子表格软件。
直观的界面、出色的计算功能和图表工具,再加上成功的市场营销,使excel成为最流行的个人计算机数据处理软件。
在年,作为office的组件发布了5.0版之后,excel就开始成为所适用操作平台上的电子制表软件的霸主。
microsoftoffice是一套由微软公司开发的办公软件套装,它可以在microsoftwindows、windowsphone、mac系列、ios和android等系统上运行。
与其他办公室应用程序一样,它包括联合的服务器和基于互联网的服务。
从版的office被称为“officesystem”而不叫“officesuite”,反映出它们包括服务器的事实。
office最初是一个推广名称,出现于年代早期,指一些以前曾单独发售的软件的合集。
当时主要的推广重点是:购买合集比单独购买要省很多钱。
最初的office版本包含word、excel和powerpoint。
“专业版”包含microsoftaccess,microsoftoutlook当时不存在。
随着时间的改变,office应用程序逐渐集成,共享特性,例如:拼写和语法检查、ole数据集成和vba脚本语言。
矩阵函数的计算方法
矩阵函数的计算方法
矩阵函数是数学和物理学中的重要方面,它的用途涉及广泛,其中包括电路设计、信号处理、数值分析、控制理论等方面。
矩阵函数是一种重要的数学概念,它可以被用来对更复杂的问题进行求解。
它能为我们提供准确的结果,它涉及到许多领域,以解决这些难题。
矩阵函数主要涉及矩阵的表示,以及这些矩阵相互之间的数学关系,例如逆、伴随矩阵,还可以进行一些复杂的计算,例如行列式展开、特征值计算以及两个或更多的矩阵的乘积,等等。
矩阵的使用极其广泛,不仅涉及数学,在工程科学等领域中也有着非常重要的作用。
矩阵函数的计算方法具有很高的复杂性,可以分为离散和连续,离散可以使用向量和矩阵之间的关系来求解,而连续可以使用矩阵微积分以及矩阵的可延性等来完成求解。
此外,也可以使用求解矩阵函数的软件工具来完成计算,常见的矩阵函数计算软件有MATLAB、Scilab等。
矩阵函数的计算方法目前应用在电子设计自动化技术(EDA)中,其技术应用范围遍布电路、信号处理、系统集成、数据分析、计算机程序设计,数学建模等领域,从而改善整个EDA系统的效率和可靠性。
综合以上,矩阵函数在当今科技领域扮演着至关重要的角色。
它为电子行业和快速发展的IT行业提供了一种成熟的复杂的计算方法,以解决许多复杂的问题。
它的广泛应用为科技进步和社会发展提供了可行性解决方案。
矩阵函数待定系数法的关键点
矩阵函数待定系数法的关键点
矩阵函数的待定系数法是一种新型的数值方法,旨在求解矩阵函数的解决方案。
它与传统
的快速函数求解方案不同,因为它使用强大的矩阵表示形式来求解未知系数。
矩阵函数的待定系数法是一种灵活、自适应的技术,它允许输入矩阵的形状可以相互改变,从而允许更大的可扩展性和可兼容性,并可以有效地解决大量复杂的矩阵函数问题。
一般而言,矩阵函数的待定系数法以未知系数替换输入矩阵元素,然后在输出矩阵中恢复
所得到的替换项,从而求出解决方案。
通常,在此过程中,一些算法会被调用来实现,这
些算法可以在未知系数空间中搜索最佳解决方案。
使用矩阵函数的待定系数法,可以以无变量的形式处理多个和更复杂的矩阵函数问题,具
有更高的速度和更大的精度。
此外,它可以明显简化非线性函数和迭代过程,并能有效地
处理多项式函数系统,而无需任何调整或改善。
最后,它具有很强的可扩展性,可以针对
不同的函数形式量化,甚至可以处理离散系统的建模问题。
由于其強大的矩阵函数求解功能,矩阵函数的待定系数法已经成为众多数值计算领域中非
常流行的技术,在一些计算中仍然可以以更低的计算成本实现优异的结果。
当前,矩阵函
数的待定系数法已经被广泛应用于金融、生物医学和画质等领域,并被用于优化计算模型、求解混合系统和社会网络等复杂系统的处理问题,以及加快图像处理的过程等多项方面。
矩阵的拉格朗日乘数法
矩阵的拉格朗日乘数法矩阵的拉格朗日乘数法是一种优化问题的求解方法,它可以用于求解约束条件下的最优解。
在这种方法中,我们使用拉格朗日乘数来将约束条件转化为目标函数的一部分,从而将原问题转化为一个无约束的优化问题。
具体来说,假设我们要最小化一个函数f(x)的值,同时满足一些约束条件g(x)=0。
那么我们可以构造一个拉格朗日函数L(x,λ)=f(x)+λg(x),其中λ是拉格朗日乘数。
这个函数的极小值点满足以下两个条件:1. L对x的偏导数为0:∂L/∂x=02. L对λ的偏导数为0:∂L/∂λ=0第一个条件告诉我们,极小值点必须满足原函数f(x)的梯度与约束条件g(x)的梯度方向相反。
第二个条件告诉我们,拉格朗日乘数λ必须满足约束条件g(x)=0。
将上述条件带入拉格朗日函数中,我们可以得到一个关于x和λ的方程组。
通过求解这个方程组,我们可以得到最优解x*和对应的拉格朗日乘数λ*。
这个最优解满足原函数f(x)的梯度与约束条件g(x)的梯度方向相反,并且满足约束条件g(x)=0。
在矩阵的拉格朗日乘数法中,我们将x和λ都看作向量,将函数f(x)和约束条件g(x)都看作向量函数。
这样,我们就可以将拉格朗日函数写成一个向量形式的表达式。
通过对这个表达式求偏导数,我们可以得到一个关于向量x和λ的方程组。
这个方程组可以通过矩阵运算来求解,从而得到最优解x*和对应的拉格朗日乘数λ*。
总之,矩阵的拉格朗日乘数法是一种非常有效的优化问题求解方法。
它可以用于求解约束条件下的最优解,而且可以通过矩阵运算来实现。
在实际应用中,我们可以将这种方法应用于各种不同的优化问题,从而得到最优解。
矩阵求函数值域
矩阵求函数值域
矩阵的函数值域是指将矩阵中的元素带入函数后所得到的结果的集合。
设函数为f,矩阵为A,则矩阵的函数值域可以表示为
f(A)={f(a) | a∈A}。
要求矩阵的函数值域,需要将矩阵中的每个元素带入函数,计算对应的函数值,并将所有函数值组成集合。
具体步骤如下:
1. 初始化结果集合R为空集。
2. 遍历矩阵A中的每个元素a。
3. 计算函数值f(a)。
4. 将计算得到的函数值f(a)添加到结果集合R中。
5. 遍历完所有的元素后,将集合R作为函数的值域。
需要注意的是,函数的定义域也要考虑,只有当矩阵中的元素在函数定义域内时,才能计算得到函数值,并将其添加到值域中。
如果定义域与矩阵的元素不匹配,那么对应的函数值就无法计算,也就不会出现在值域中。
求矩阵指数函数
求矩阵指数函数
求矩阵指数函数是矩阵算数的一个重要分支,它是研究向量空间、线性空间、正定空间及其非正定子空间的指数函数问题的途径。
求矩阵指数函数的思想是,给定一个n阶实对称矩阵A,可以将求矩阵指数函数转化为求解特定线性方程组的问题,从而得到指数函数的值。
矩阵指数函数由实对称矩阵A(n阶)和一个实向量b(n维)给出,可以形式化描述为
expA(b)=exp(At-1/2)b
其中,A-1/2表示矩阵A的幂,也就是矩阵的平方根。
因此,在求解求矩阵指数函数的问题时,需要先求出该矩阵的反平方根,然后求解特定线性方程组,最后得到指数函数的值。
矩阵指数函数的计算具有重要的应用价值,在很多领域都有实际意义。
例如,在机器学习、模式识别和统计分析中,为了表达数据样本之间的相互关系,需要对数据进行矩阵分析,而矩阵指数函数可以帮助我们准确识别数据中的模式,从而实现对数据的有效挖掘和利用。
此外,矩阵指数函数的求解还可以应用在图像处理、分类学习、毁伤性脑病的模拟诊断以及生物信息学相关领域。
其发挥作用无处不在,在互联网领域中,它对增强智能技术、数据分析等应用特别关键,可以帮助网络企业更准确、更快速地收集、处理和分析信息,从而更好地应对客户需求、提升产品服务质量,提高企业核心竞争力。
总而言之,求矩阵指数函数是一个重要的矩阵算数方面的理论及实践的研究领域,在计算技术中有非常重要的应用价值,在互联网领域有着更广泛的用处。
矩阵求导公式最常用公式
矩阵求导公式最常用公式
求矩阵求导是以矩阵表示函数的偏导数为重点的求导,主要用于研究机器学习中复杂函数的最优化问题,从而求出最佳参数。
求导时,可以使用最常用的求导公式,因此,本文将介绍一种最常用的矩阵求导公式——梯度矩阵求导公式。
梯度矩阵求导,主要是对于可导函数,利用偏导数的概念,求出梯度。
具体算法步骤为:
1.确定函数及其可导性。
函数为f(x),其中x是矩阵;
2.求出函数的偏导数;
3.将偏导数的值加起来,形成矩阵的梯度;
4.最终梯度矩阵即为得出的梯度矩阵求导结果。
梯度矩阵求导公式的使用一般情况,可以用来求解复杂函数最优化问题,也可以用来求解机器学习和智能控制系统中的统计学习方法。
此外,它还可以使用复合函数进行求导,提高了求导的精确性,从而解决了一系列问题。
综上所述,梯度矩阵求导公式是最常用的矩阵求导方法,具有解决复杂函数最优化问题和机器学习中统计学习方法等优点,因而得以被广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、利用零化多项式求解矩阵函数.
利用Jordan 标准型求解矩阵函数的方法比较复杂,它需要求J 和P 。
下面我们介绍根据零化多项式求解矩阵函数的一种方法。
定律:n 阶方阵A 的最小多项式等于它的特征矩阵的第n 个(也就
是最后一个)不变因子n d ()λ。
(可参见张远达《线性代数原理》P215)
设n 阶方阵A 的不变因子反向依次为n d (),λn 11d (),,d ()-λλ ,由它们给出的初等因子分别为
12r m m m 12r (),(),,()λ-λλ-λλ-λ ;s r 1m m r 1s (),,()++λ-λλ-λ ;
,s
i
i 1
m
n ==∑
由于1223n 1n d ()|d (),d ()|d (),,d ()|d ()-λλλλλλ ,故 1o r 1s ~+λλ必定出现在1r ~λλ中; 2o 若i j (i r)(j r)λ>=λ≤则i j m m ≤ 根据上述定理,A 的最小多项式
12r m m m 012r ()()()()ϕλ=λ-λλ-λλ-λ
即 12r m m m 12r (I A)(I A)(I A)O λ-λ-λ-=
令r
i i 1m m ==∑,则可见m A 可以由02m 1A I,A,A ,,A -= 线性表示,从
而m i A (0)+λ>亦可由02m 1A I,A,A ,,A -= 线性表示。
所以,矩阵函数f(A)若存在,也必定可由0m 1A ~A -线性表示。
因此,我们定义一个系数待定的(m -1)次多项式m 1
i i i 0g()c -=λ=λ∑,根据
以上论述,适当选择系数0m 1c ~c -,就可以使f (A )=g (A )
又,假设J 、P 分别为A 的Jordan 标准形及相应变换矩阵:1A PJP -= 则 1f(A)Pf(J)P -=,1g(A)Pg(J)P -=→ f(J)=g(J) →i i f(J )g(J )=
⇒i i (m 1)(m 1)i i i i i i f()g(),f ()g (),,f ()g ()--''λ=λλ=λλ=λ (i 1,2,,r)=
由于g(A)为待定系数的多项式,上面就成为关于0m 1c ~c -的线性方程组。
且方程的个数为r
i i 1m m ==∑等于未知数个数,正好可以确定
0m 1c ~c -
由此给出根据最小多项式求矩阵函数的一般方法。
1o 求出最小多项式
1
2
r
r
m m m 0n 12r i i 1()d ()()()(),m m =ϕλ=λ=λ-λλ-λλ-λ=∑ ;
(或者特征多项式1
2
r r
n n n 12r i i 1
()()()(),n n =ϕλ=λ-λλ-λλ-λ=∑ )
2o 形式上写出待定多项式
m 1
i 2m 1i 012m 1i 0g()c c c c c ---=λ=λ=+λ+λ++λ∑
(或者n 1
i 2n 1i 012n 1i 0
g()c c c c c ---=λ=λ=+λ+λ++λ∑ )
3o 求解关于0m 1c ~c -的线性方程组
(k)(k)i i g ()f ()λ=λ i
(k 1,2,
,m ;i 1,2,,r )
== (或者i k 1,2,,n ;i 1,2,,r == )
4o 求出g(A),即可得f(A)=g(A).
从推导的过程看,似乎不仅最小多项式可用于矩阵函数的计算,一般零化多项式也可以,其中以特征多项式最为方便。
(但i k 1,2,,n = 的根据仍需充分作证)
例2、采用新方法计算1234123A 121⎡⎤⎢⎥
⎢
⎥=⎢
⎥⎢⎥
⎣⎦
的函数
(f ()λ=
[解] 1o 40()()(1).ϕλ=ϕλ=λ- 11m 4m n,1===λ=;
2o 230123g()c c c c λ=+λ+λ+λ 3o 方程组为
0123g(1)f(1)1c c c c ===+++ 1231
g (1)f (1)c 2c 3c 2
''==
=++ 231g (1)f (1)2c 6c 4''''==-=+ 33
g (1)f (1)6c 8''''''===
→ 321015155
c ,c ,c ,c 16161616
=
=-==
4o
231
g(A)(5I 15A 5A A )16
=+-+
14102014102A 141⎡⎤⎢⎥⎢
⎥=⎢⎥⎢⎥⎣⎦,16215616213A 161⎡⎤⎢⎥⎢⎥=⎢
⎥⎢⎥
⎣⎦
∴
500015304560520501001621565001530455205016211f(A)165015305201651551⎧⎫
⎡⎤⎡⎤⎡⎤⎡⎤⎪⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎪⎢⎥⎢⎥⎢⎥⎢⎥=+-+⎨⎬⎢⎥⎢⎥⎢⎥⎢⎥⎪⎪
⎢⎥⎢⎥⎢⎥⎢⎥⎪⎪⎣
⎦⎣⎦⎣⎦⎣⎦⎩⎭ =1111111111⎡⎤⎢⎥
⎢
⎥⎢
⎥⎢⎥
⎣⎦
与Jordan 标准形方法完全一致。