TMS320C2812在直流伺服控制中的应用
基于TMS320F2812的永磁直线电机伺服控制研究
第3 1 卷第 1 期
2 01 4年 1月
机
电
工
程
Vo 1 . 3l No. 1
J o u r n a l o f Me c h a n i c a l& E l e c t i r c a l E n g i n e e r i n电机 ; T M S 3 2 0 F 2 8 1 2 ; 伺服控制 ; 增 量式光栅 ; 前馈补偿 ; 跟踪误 差
中 图分 类 号 : T H 3 9 ; T M 3 5 9 . 4 文献标志码 : A 文章编号 : 1 0 0 1— 4 5 5 1 ( 2 0 1 4 ) 0 1 — 0 0 7 6— 0 5
基于TMS320F2812的永磁同步直线电机伺服控制系统设计
Z ENG un, ZENG e n n,W U Yix a g H J YH — a —in
( a ut o tmain,Gu n d n iest f e h oo yGu n z o F c l fAuo t y o a g o gUnv ri o c n lg a gh u,Gu n d n 0 6,Chn ) y T a g o g5 0 1 0 ia
p o e t o o n t lpo ii n tsi g i c u ae,h ve g o y a i e f r a c n o r lp e ii n. r v he r tr i ii sto e tn s a c r t a a o d d n m c p ro m n e a d c nto r c so
第 3期 21 0 2年 3月
组 合 机 床 与 自 动 化 加 工 技 术
M o l a hi o du ar M c ne To l& Aut m atc M a f c u i g Te hn que o i nu a t r n c i
NO. 3 M ar .20 2 1
Pe m a e a ne ne r Sy hr o o o e v nt o y t m e i n Ba e n TM S3 0F2 2 r n ntM g t Li a nc on us M t r S r o Co r lS s e D sg s d o 2 81
c o e - o e v o t o y t m e i n i i h d・ x s c r n f s a o s s tt e z r n t e r t r fu - l s d-o p s r o c n r ls s e d s g n wh c ・ i ure to t t r i e o b e o i h o o l x- l a
TMS320F2812串行通信在永磁同步电机伺服系统上的应用研究
据 处 理 后 通过 S 传输 出去 。 据 由上 位 机 程 序接 收 , 进 行 相 CI 数 再
关 的处 理 和分 析 。 2 串行 通信 的 实 现
串行通讯接 口(co s 是一个两线制异步 串行接 口, 通常被称 为 U T C 模块 支 持 C U与 其 他 异 步 外设 之 间 使 用 标准 非 AR 。S l P
件 设 计 , 位机 程 序 设 计 以及 上 位 机 程序 设 计 。 下
21 通信 硬 件 设计 .
在 串 行 接 口方 面 ,本 文 采 用 R 一 3 C 标 准 ,在 电气 特 性 S 22
串行 通 信 的 实现 包 含 三 个 部 分 , 分别 是 硬 起来, 将可以解决这些问题。文献f 4介绍了关于串行通信的 ’ ] 一 归 零 码进 行数 字 通 信 。
T 3021 MS 2 F 8 2串行 通信 在 永 磁 同 步F 8 1 2串行通信在永磁同步电机伺服系统上的应用研究
谭 艺乐 ( 厦门大学信息科学与技术学院, 福建 厦 门 3 10 ) 6 0 5
摘 要
在 简要 介 绍基 于 T 3 0 2 1 MS 2 F 8 2数 字信 号 处 理 器 ( S ) 永磁 同步 电机 伺 服 系统 的基 础 上 , 点 介 绍 DS D P的 重 P与 P 的 串 C 行 通 信 原理 , 结合 实 际 系统给 出异 步 串行 通 信 的软 硬 件 解 决方 案 。 并 实验 结 果表 明 , 串行 通 信 结 构 简单 、 面友 好 、 信 距 离 界 通
K y r sT 3 0 2 1 ,e o s se s r l o e wo d : MS 2 F 8 s r y tm,e i mmu ia in 2 v a c nc t o
基于TMS320F2812的无刷直流电机控制
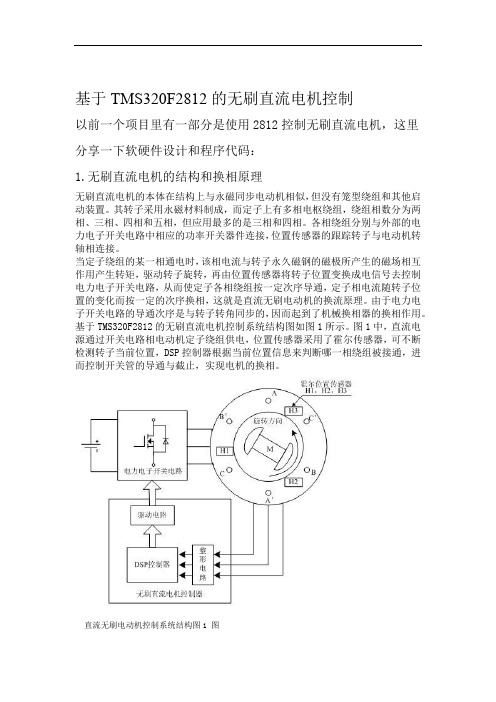
基于TMS320F2812的无刷直流电机控制以前一个项目里有一部分是使用2812控制无刷直流电机,这里分享一下软硬件设计和程序代码:1.无刷直流电机的结构和换相原理无刷直流电机的本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他启动装置。
其转子采用永磁材料制成,而定子上有多相电枢绕组,绕组相数分为两相、三相、四相和五相,但应用最多的是三相和四相。
各相绕组分别与外部的电力电子开关电路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。
当定子绕组的某一相通电时,该相电流与转子永久磁钢的磁极所产生的磁场相互作用产生转矩,驱动转子旋转,再由位置传感器将转子位置变换成电信号去控制电力电子开关电路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相,这就是直流无刷电动机的换流原理。
由于电力电子开关电路的导通次序是与转子转角同步的,因而起到了机械换相器的换相作用。
基于TMS320F2812的无刷直流电机控制系统结构图如图1所示。
图1中,直流电源通过开关电路相电动机定子绕组供电,位置传感器采用了霍尔传感器,可不断检测转子当前位置,DSP控制器根据当前位置信息来判断哪一相绕组被接通,进而控制开关管的导通与截止,实现电机的换相。
直流无刷电动机控制系统结构图1 图2 电子换相器的工作原理图图图2给出了一个三相无刷直流电机电子换相原理图。
图中符号H1、H2和H3表示三个霍尔位置传感器,它们输出电平信号。
当电机的转子运行到x-u平面的正半周(图中虚线标出的区间),则H1传感器输出高电平。
同理,当电机的转子分别运行到y-v和z-w,平面的正半周(图中虚线标出的区间),则对应的H2和H3分别输出高电平。
由图可见,H1、H2和H3输出高电平的区间是互有重叠的,如果将H1、H2和H3的输出电平组合成一个向量[H1 H2 H3],则可以得到6种有效组合:[001]、[010]、[011]、[100]、[110]和[101],每种组合覆盖整个圆周的1/6(即60°)。
基于TMS320F2812无刷直流电机控制系统设计
基于TMS320F2812无刷直流电机控制系统设计众所周期,无刷直流电机既具有沟通电机容易,运行牢靠,维护便利等优点,又具有直流电机运行效率高,不受机械换向限制,调速性能好,易于做到大容量、高转速等特点。
TI公司的TMS320F2812数字信号处理器()既具有高速信号处理和数字功能所需的体系结构。
还具有专为电机控制应用提供单片解决计划所需的外围设备。
以TMS320F2812为核心的全数字电机控制系统极大地简化了硬件设计,提高了系统的牢靠性,降低了成本,并对无刷直流电机的普及应用具有良好的前景。
为此,提出了一种基于TMS320F2812的全数字永磁无刷直流电机控制计划。
2 系统设计计划该系统设计采纳三相Y型永磁方波无刷电机控制计划,通电方式为两两通电。
图1给出控制系统原理框图。
它采纳全数字三闭环控制。
其中,环采纳PI调整器,速度环采纳遇限减弱积分的积分分别PID控制算法,它的输出极性打算了正反转方向,从而可实现电机的四象限运行。
位置环采纳PI调整器。
采纳全桥型PWM调制。
3 系统硬件设计图2给出基于TMS320F2812的无刷直流电机控制系统。
采纳TMS320F2812作为控制器,用于处理采集到的数据和发送控制指令。
TMS320F2812控制器首先通过3个I/0端口捕获直流电机上霍尔元件H1,H2,H3的高速脉冲信号,检测转子的转动位置,并按照转子的位置发出相应的控制字,以转变PWM信号的当前值,进而转变直流电机驱动(全桥控制电路)中功率管的导通挨次,实现对电机转速和转动方向的控制。
电机的码盘信号A,B通过TMS320F2812 DSP控制器的CAP1,CAP2端口捕获的。
捕获到的数据存储在寄存器中,通过比较捕获到A,B两相脉冲值,以确定当前电机的正反转状态和转速。
在系统运行中,驱动庇护电路检测当前系统的运行状态,假如系统中浮现过流或欠压情况,PWM信号驱动器(IR2131)启动内部庇护电路,锁存后继PWM信第1页共4页。
基于TMS320F2812的通用伺服电机控制系统的设计与实现
Sci ence and Techn Ogy OI Con suli g Her l tn ad
工 程 技 术
基于 T 3 0 2 MS 2 F 8 1 2的通用伺服 电机控制系统的设计与实现
李想 ( 中国电子科技集 团公 司第 5 研 究所 河北石家庄 4
1引言
目前 ,随 着 电 力 电子 技 术 ,微 电子 技 术 , 代控制理论 的发展 , 现 交流伺 服系统逐渐 成 为工业 伺服 系统 的主流 ,但在一 些特 定的 领域 内直 流伺服 系统 仍 占据着 主要地 位 。本 系统利用 T 3 0 2 l 实现 了直流 /交流伺 MS 2 F 8 2 服控制 系统的设计 。T 3 0 2 l 是 T 公 MS 2 F 8 2 I 司设计 的面 向工 业控制 领域 的数 字信号 处理 器, 适用于卫星天 线伺服系统 、工业控制、机 床控 制等高精度应用 。T 3 0 2 1 的最 高 M¥ 2 F 8 2 运行 频率可达 l 0 , 内有 l 8 r 5M 片 2 K wo d的 F A H程序 存储器 , 8 r L S l K wo d的数据 /程 序R AM。 包括 两个 8 通道或一 个 l 通 道的 l 6 2 位 A/ D转 换 器。两 个 串行 通讯接 口( C ) S I, 控制 器局 域 网络 ( CAN) 线 , 个独 立 的 总 两 SP V wM 发 生器 ;具有复 合 I E l4 . 标 准 E E 19 1 的在线仿真 接 K。采 用该 D P可 使本系统的 I S 硬 件 结 构 简单 ,控 制 精 度 高 ,实 时 性 强 。
一
_ -( 2 _ s x i - n O
电压 方程可表 示为
U = R i +缸 d+e o
高性能DSP芯片TMS320F2812在电机控制器中的应用

(7) 16个信道的12位A/D接口可灵 实现FLASH ROM引导加载。硬件电路
算法,并且其代码与以前各个型号的 活设置采样方式。
如图2,JP15为SPI或SCI引导加载器选
DSP 兼 容 , 故 TMS320F2812 DSP 有 着
(8) 可使用多达56个可编程且可 择,1- 2时选择SPI,2- 3时选择SCI;
电机控制系统结构原理图及 各组成部分的简单介绍
电机控制系统的结构原理图如图
1所示,下面将就各个组成部分依次 进行介绍。
◇ 高 性 能 DS P 芯 片 TMS 320F2812简介
TMS320F2812是 TI 公 司 2003 年 正 式推出的32位定点DSP芯片,是目前 工业控制和机器人控制等领域中最高 档的DSP之一。该芯片性能优越,比 起TMS320LF2407A来讲,各项性能指 标都有了显着的提高。该芯片资源非 常丰富,可大大简化外围电路设计。 其主要资源和性能指标如下:
本软件设计采用模块化编程的思
一个运放比较器,比较器有一个参考 有转速反馈的闭环系统。系统参数由 想,利用电机的状态方程构造了三相
电压,当信号低于这个参考电压时, 信号经过运算放大后输出;当信号超 过这个参考电压时,说明逆变器发生 过流情况,比较器输出低电平将DSP 的 PDPINT 引 脚 拉 低 , 此 时 所 有 的 PWM输出立即被置为高阻态。
始化定时器等,同时将程序中所要用 中断服务程序是DTC控制程序的核心 弥补了之前使用的TMS320LF2407A在
到的各种子模块一一定义,并将各模 部分,其作用是在每个周期内选择正 计算能力上的不足,使其能够满足更
块的初始值进行设置。⑵接收初始值 确的空间电压矢量并转换为PWM开关 为复杂的实时性要求和更为复杂的控
基于TMS320F2812伺服矢量控制系统的研究
摘
201) 10 6
要 :对 以 T 30 2 1 核 心 芯 片 的伺 服 矢量 控 制 系统 硬 件 、软 件 的设 计 方 法 进 行 阐述 与 论 证 。实 践 表 明 ,利 MS2 F 8 2为
用3 2位 D P芯片 T S 2 F 8 2 S M 30 2 1 进行伺 服矢量控制 ,运算速度快 、精度高 ,而且高编译 效率 的 C语 言编程使复 杂系 统 的数字化实现简单。 关键词 :T 3 0 2 1 ;矢量控制 ;伺服系统 MS 2 F 82
通 汛 接¨
高 ,力矩惯 量 比大 ,定 子 电流 和定 子 电阻损 耗 减小 , 且转 子参数 可 测 、控 制 性 能 好 ;和 普 通 同 步 电 动机
模拟 信号
E, OM PR
相比,它省去了励磁装置 ,简化 了结构 ,提高了效 率 ¨ 。永磁 同步 电机 伺 服矢 量 控 制 系 统 能 够 实现 高 J 精度 、高 动态 性 能 、大 范 围 的调 速 或定 位 控 制 。另 外 ,微 控制 器 的发 展 ,使 得 矢 量 控 制 系 统 的 实现 越 来越方 便 ,尤其 是随着 D P控 制芯 片 的进 一步发 展 , S 其运算 速度 越来 越 快 ,精度 越来 越 高 ,而且 高 编 译 效 率 的 c语 言编 程 使 复杂 系 统 的数 字 化 实 现越 来 越
分为 控制 电路 和 逆变 器 两 大 部 分 。永 磁 同步 电机 矢
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第21卷第2期2008年6月
江西电力职业技术学院学报Journa l of J i a ngx i Voca ti ona l and Techn i ca l College of Electr i c ity
Vol 121,No .2
Jun .2008T MS320C2812在直流伺服控制中的应用
康 杰1
,宁艳花
2
(1.广东火电工程总公司,广东 广州 510700; 2.江西电力职业技术学院,江西 南昌 330032)
摘 要:阐述P WM 调速的原理及电路知识,介绍T MS320C2812在直流伺服控制中的应用。
关键词:T MS320C2812;伺服控制;直流电机中图分类号:TP273 文献标识码:A 文章编号:1673-0097(2008)02-0043-03
收稿日期:2008-03-04作者简介:康 杰(1979-),男,江西赣州人,助理工程师.
0 引言
直流伺服控制技术广泛应用于军工、精密机床、机器人等领域。
随着电力电子技术、数字信号处理技术的进步,使得直流伺服系统向着数字化、集成化、小型化、智能化的方向发展,为了获得调速范围宽、位置控制精度高、体积小、集成度高的直流伺服系统,该文提出了一种基于T M S320C2812的全数字直流伺服驱动控制系统。
该系统充分利用DSP 周边接口丰富、运算速度快的特点,使得系统的体积小、集成度高、可实现较复杂的算法。
T M S320C2812主要特点如下:
(1)运算速度快,工作时钟频率达150MHz,指令周期可以达
到6167ns 以内;功耗低;(2)采用哈佛总线结构,具有强大的操作能力,迅速中断响应和处理能力;(3)片内存储器包括
8K ×16位的Flash 存储器,有多达1M 存储器的扩展;(4)外
部扩展模块(P I E )可支持96个外部中断;(5)两个增强的事件管理器模块(E VA,E VB ),提供了一整套用于运动控制和电机控制应用的功能和特性,每个事件管理模块包括通用定时器(GP ),比较单元,捕获单元以及正交编码脉冲电路;(6)有改进的局域网络(e2CAN ),多通道缓冲串行接口(M c BSP )和串行外围接口模式;(7)其代码能与24X /240X 数字信号处理器完全兼容。
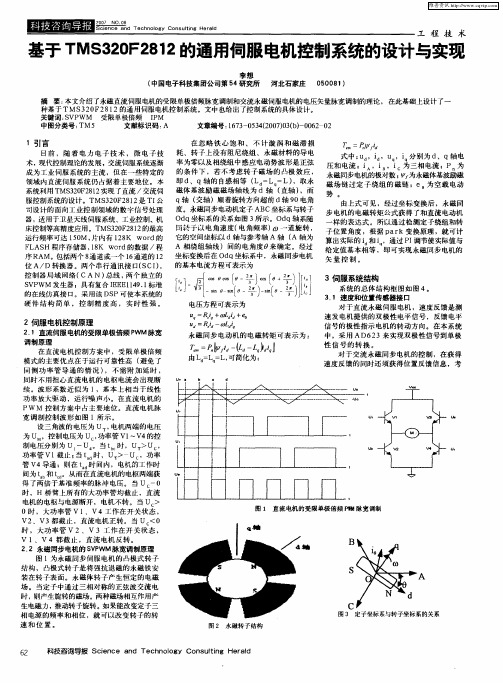
1 直流P WM 调速原理
在现代直流伺服系统中,大部分采用的是脉宽调制
(P WM )技术。
P WM 技术就是利用全控型电力电子开关器
件的开关特性来调制固定电压的直流电源,以一个固定的开关频率来接通和断开功率开关管,通过改变通、断时间的长短来改变直流电机电枢电压的占空比的大小从而改变电枢平均电压的大小,进而控制电机的转速。
图1是H 型可逆
P WM 功率变换电路。
四个功率管可以分为两组,
第一组功
图1 可逆H 型P WM
变换电路
图2 功率管的驱动电压
44 江西电力职业技术学院学报第21卷
率管VT2和VT4的驱动电压V2和V4相同,另一组功率管
VT1和VT3的驱动电压相同,但是两组之间的驱动电压相位
正好相反,如图2所示。
在0<t <t on 时,VT2和VT4同时饱和导通时,VT1和VT3截止,电流经过VT2到达A 点,然后流过直流电机到达B 点,然后流过VT4形成回路,此段时间电机两端的电压U AB 为+U,电动机处于电动状态。
在t on <t
<T 时,VT2和VT4同时截止,V1和V3为正,由于电枢电感
释放储能的作用,电枢电流经过二极管VD1和VD3续流,由于VD1和VD3的正向压降使VT1和VT3的c -e 极承受反压而不能导通,电枢电流流经二极管VD3和VD1形成回路。
此段时间流过电机的电流方向相同(电机在重载情况下),电机两端的电压U AB 却为-U 。
电枢电压和电流见图3。
图3 电枢电压和电枢电流
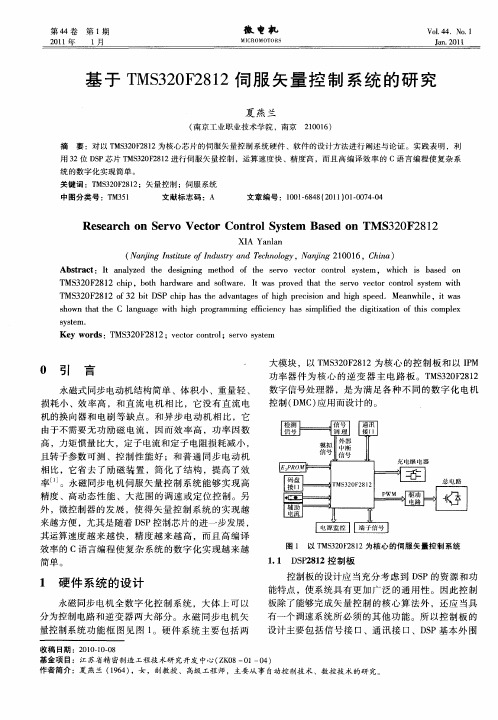
2 T MS320C2812在位置伺服控制中的应用
T MS320C2812的高速运算能力和面向电机的高效控制
能力集于一体,使得实现伺服系统的全数字化控制成为可能。
基于DSP 的全数字直流伺服电机控制系统,充分利用其丰富的周边接口,使系统的结构大为简化,为直流伺服电机驱动控制系统的小型化、集成化奠定了坚实的基础。
T MS320C28X 里的事件管理器(E V )模块是专为电动机控制
而设计的模块,它能够产生可调死区的各种P WM 波,可以通过增量式光电编码器接口测量电动机的转速、转向、角位移,通过捕捉功能测量脉宽。
图4为有刷直流伺服电机控制系统图,系统以增量式光电编码器作为位置检测单元,把检测过来的信号经过逻辑判断和速度计算分成转角和转速两个量分别反馈给位置P I 调节器和速度P I 调节器。
根据给定位置,采用梯形曲线加减速算法进行轨迹更新,中断控制程序定时采样,分析来自增量式光电编码器的反馈信号,判明电机的真实位置和转速,采用数字P I 控制算法进行实时在线控制,然后产生相应的P WM 控制信号。
由隔离驱动电路驱动功率开关管,从而驱动电机,根据指令的要求,快速而精确地进行位置、速度的调节与控制,从而在大范围内实现速度和位置的闭环伺服控制。
在设计的时候可以用串行通行接口连接PC 上位机,用上位机来控制。
此外,也可以通过I/O 口用键盘来控制。
驱动芯片可以用L MD18200、t p ic0108B 等
H 桥式专用直流电机集成驱动芯片。
图4 有刷直流电机位置伺服控制图
3 软件流程
直流伺服控制软件流程见图5。
第2期康 杰,宁艳花:T MS320C2812在直流伺服控制中的应用45
图5 直流伺服控制软件流程图
4 结束语
采用T MS320C2812来进行直流电机的位置伺服控制,能实现对直流电机的快速、精确定位,使直流电机的位置伺服控制变得更简单化和实用化,在众多的工业控制场合有广泛地应用。
参考文献:
[1]陈伯时.电力拖动自动控制系统[M].北京:机械
工业出版社,2003.
[2]王晓明,王 玲.电动机的DSP控制[M].北京:
北京航天航空大学出版社,2004.
[责任编辑 杜琴]
(上接第42页)
专门机构,把具有高度责任心和业务熟练的人充实到反窃电队伍中来,提高反窃电人员政治素质和业务素质,人人做到“企业兴衰,人人有责”。
(3)严格考核用电检查人员。
制定严格的考核制度,规范用电检查人员的行为和查处程序,明确下达任务指标(检查户数、到账金额等),实行重奖重罚的奖惩制度。
(4)设立反窃电举报电话。
成立反窃电举报中心,并设立反窃电举报电话,通过电视向全市公布。
利用举报途径获得更多的窃电信息,将反窃电工作纳入群众监督中。
(5)加强跟踪抄表工作,及时发现窃电嫌疑户。
反窃电支队与用电管理所密切配合,认真做好跟踪抄表工作,在抄表过程中认真分析用户的用电量或现场发现用户窃电,对窃电户也是一种有力的监督。
(6)加大执法力度,严厉打击窃电行为。
争取与地方公安联合开展反窃电工作,有力打击窃电行为。
平时,派来的公安人员可同用电检查人员一起工作,白天、黑夜齐上阵,这样就可有效地遏制窃电猖獗的现象,整顿用电秩序,营造良好的用电环境。
(7)始终坚持预防为主、防范与查处相结合的原则。
加强对电力线路的整改工作,对100K VA及以上专变用户套装高压计量箱,对用电量较大的商业和非普通用户安装终端监控表,从技术上使窃电户难以得逞。
(8)正人先正己,认真对待职工及亲属用电。
在对外开展反窃电工作的同时,要规范好职工及亲属用电。
行文明确指出,凡在用电检查过程中发现职工及亲属无表用电,一律按社会窃电论处。
一旦发现中层干部在局外无表用电,则就地免职,一般职工按下岗处理,这对全面推进反窃电工作起了关键性的作用。
4 结束语
不管窃电分子有多猖獗,只要我们不懈努力,正气必将压倒邪气。
经过供电部门多次大规模的稽查和各营业班站用电管理人员的不定期检查,严厉打击了不法窃电分子,有效地遏制了违章、窃电行为,给国家、企业挽回了损失,线损率在不断下降。
但是,反窃电形势依然很严峻、反窃电任务十分艰巨,仍有一些不法分子有恃无恐、顶风作案。
只要我们依照《电力法》这一强有力的法律武器,按照“组织到位、责任到位、工作到位、措施到位、考核到位、合作到位”的原则,必将能创建良好的供用电环境,为构建和谐平安的瓷都贡献一份力量。
[责任编辑 刘春景]。