LM3SLib使用定时器
LTE常用定时器解释及配置建议

LTE常用定时器解释及配置建议LTE(Long Term Evolution)是一种移动通信技术,提供更快的数据传输速度和更低的时延。
在LTE系统中,定时器被广泛用于处理各种时序事件,以确保系统正常运行。
本文将解释LTE常用定时器的作用,并提供配置建议。
1.提示定时器(T300):提示定时器用于处理无线资源块(RB)分配的确认消息(PRACHRACH)。
当UE发送资源申请后,网络需要在一定时间内确认资源分配是否成功。
如果确认消息未及时到达,UE将重新发送资源请求。
T300定时器的配置建议是根据网络负载和时延要求来设置合适的超时时间。
通常,T300的取值范围为100毫秒到2000毫秒。
2.连接建立定时器(T310):3.连接失活定时器(T325):连接失活定时器用于处理UE在一些服务小区的连接已断开的情况。
当连接断开后,UE需要等待一定时间来检测该服务小区是否恢复连接。
T325定时器的配置建议是根据网络规划和时延要求。
通常,T325的取值范围为100毫秒到2000毫秒。
4.心跳定时器(T3324):心跳定时器用于处理UE与网络之间的链路保持活跃。
网络会周期性地发送心跳消息给UE,以确保网络与UE之间的连接保持正常。
如果UE 在T3324定时器到期之前未收到心跳消息,UE将认为连接已断开并进行相应的处理。
T3324定时器的配置建议是根据网络规划和链路保持的要求。
通常,T3324的取值范围为10秒到30秒。
5. 支持Paging的空闲定时器(T3413):支持Paging的空闲定时器用于处理UE处于空闲状态时的Paging消息。
当UE处于空闲状态时,网络会周期性地发送Paging消息给UE,以便通知UE有待处理的消息。
如果UE在T3413定时器到期之前未接收到Paging消息,UE将认为当前服务小区无任何待处理的消息。
T3413定时器的配置建议是根据网络规划和Paging消息的要求。
通常,T3413的取值范围为20秒到200秒。
Windows中7种定时器
众所周知,Windows 是基于消息机制的系统,任何事件的执行都是通过发送和接收消息来完成的。
这样就带来了一些问题,如一旦计算机的CPU被某个进程占用,或系统资源紧张时,发送到消息队列中的消息就暂时被挂起,得不到实时处理。
因此,不能简单地通过Windows消息引发一个对定时要求严格的事件。
另外,由于在Windows中已经封装了计算机底层硬件的访问,所以,要想通过直接利用访问硬件来完成精确定时,也比较困难。
所以在实际应用时,应针对具体定时精度的要求,采取相适应的定时方法。
VC中提供了很多关于时间操作的函数,利用它们控制程序能够精确地完成定时和计时操作。
本文详细介绍了VC中基于Windows的精确定时的七种方式,如下图所示:图一图像描述方式一:VC中的WM_TIMER消息映射能进行简单的时间控制。
首先调用函数SetTimer()设置定时间隔,如SetTimer(0,200,NULL)即为设置200ms 的时间间隔。
然后在应用程序中增加定时响应函数OnTimer(),并在该函数中添加响应的处理语句,用来完成到达定时时间的操作。
这种定时方法非常简单,可以实现一定的定时功能,但其定时功能如同Sleep()函数的延时功能一样,精度非常低,最小计时精度仅为30ms,CPU占用低,且定时器消息在多任务操作系统中的优先级很低,不能得到及时响应,往往不能满足实时控制环境下的应用。
只可以用来实现诸如位图的动态显示等对定时精度要求不高的情况。
如示例工程中的Timer1。
方式二:VC中使用sleep()函数实现延时,它的单位是ms,如延时2秒,用sleep(2000)。
精度非常低,最小计时精度仅为30ms,用sleep函数的不利处在于延时期间不能处理其他的消息,如果时间太长,就好象死机一样,CPU占用率非常高,只能用于要求不高的延时程序中。
如示例工程中的Timer2。
方式三:利用COleDateTime类和COleDateTimeSpan类结合WINDOWS的消息处理过程来实现秒级延时。
我的easyarm
本文写给有一定51基础的LM3S入门者搭建编译下载平台搭建平台就不多说了,就是一些软件的安装,keil for arm编译和LuminaryFTDI驱动。
在D:/安装包/ARM编译及驱动安装包里有编译和驱动软件。
里面有说明,这就不说了。
KEIL FOR ARM 新建工程经历了三四天的时间,安装keil、驱动现在终于把arm的平台搭成了。
因为有前面学习STC51的基础所以下面正式开始LM3S1138的学习。
我认为所有的单片机甚至微处理器的使用不过就是用其来控制外设,因为只有一个单片机是什么都干不了的,做成装饰品还得先把管脚磨掉免得伤人。
但是加上外设以后就不一样了,有多么神奇完全超出你的想象。
回归正题学习LM3S1138不过就是学习如何用程序让他来控制外设。
好了,说了这么多就是一个重点,学习单片机重点学习程序。
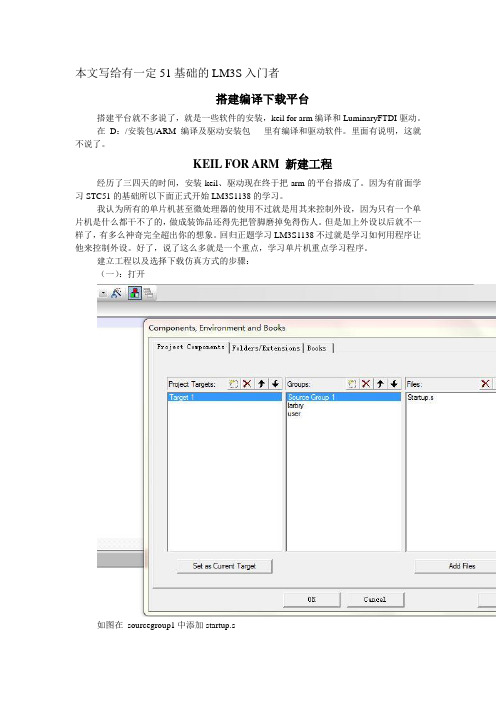
建立工程以及选择下载仿真方式的步骤:(一):打开如图在sourcegroup1中添加startup.s在Larbry中添加driverlib.lib 和(这个文件在位置driverlib/grlib/rvmdk/和driverlib/scr/rvmdk中找).lib的文件就是多个c文件的集合,作用和c文件一样,只不过c文件是可以被别人打开阅读更改的,而lib文件不能被打开编辑。
在User 中添加工程名.c(二)在中设置linker use memory layout fromtarget dialogDebug use luminary eval boardUtilities luminary eval boardKo完成开始解释为什么要这样设置先说startup.s是什么。
首先想到的是打开看看就知道了,结果里面一大坨鸟语和汇编(汇编是写给机器读的低级语言,也不能算人话),算了还是问度娘吧。
这个貌似和A51一样,那作用也是一样的了,就是起一个引导作用,创造一个c语言可以运行的环境。
参见51基础里的A51研究。
5.3 LM3S微控制器通用定时器(GPTM)
#include <hw_types.h>
#include <hw_sysctl.h>
#include <hw_gpio.h>
#include <hw_memmap.h>
#include <hw_ints.h>
#include <hw_nvic.h>
#include <hw_timer.h>
/*********************TimerCfg()使用上面定义的常量**********************************/
void TimerCfg(unsigned long ulBase, unsigned long ulConfig)
{
//使用前先关闭TA和TB
HWREG(ulBase + TIMER_O_CTL) &= ~(TIMER_CTL_TAEN | TIMER_CTL_TBEN);
1.
GPTMCFG,GPTM配置寄存器,写入的值决定了GPTM是32位还是16位模式。
GPTMTAMR、GPTMTBMR用于进一步配置GPTM。
GPTMCTL寄存器与GPTMCFG和GMTMTnMR寄存器一起使用,对定时器配置进行微小调整,并使能其它诸如定时器停止和输出触发信号等特性,输出触发可以用来触发ADC模块进行转换。
5.
5
5.
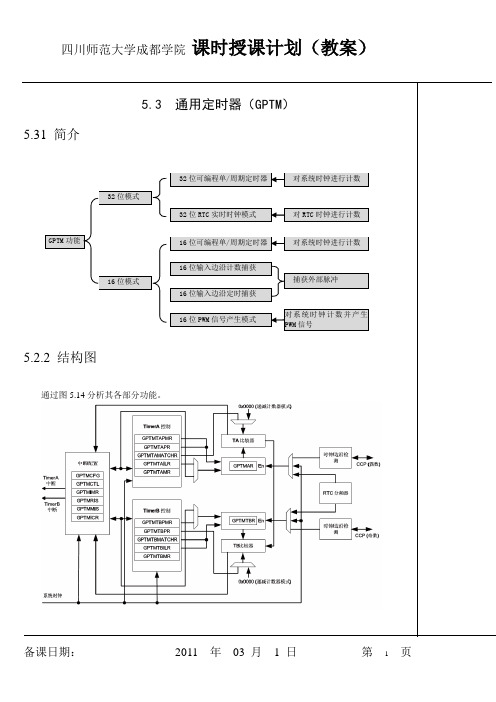
通过图5.14分析其各部分功能。
5.2.3
寄存器映射
定时器名称
地址
TIMER0_BASE
0x40030000
TIMER1_BASE
0x40031000
STM32F103通用定时器PWM应用例程--蜂鸣器演奏乐曲
STM32F103通用定时器PWM应用例程:蜂鸣器演奏乐曲一.说明:本例程是将流明LM3SLib_Timer.pdf文档中的例程9及例程10(PWM应用:蜂鸣器演奏乐曲),移植到STM32F103上。
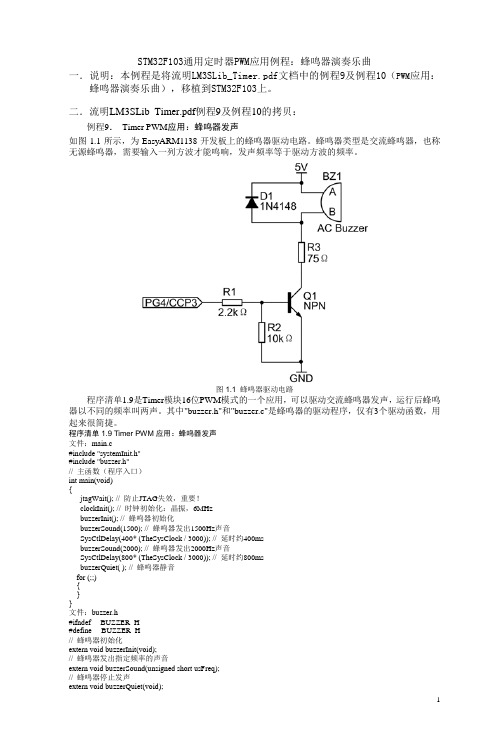
二.流明LM3SLib_Timer.pdf例程9及例程10的拷贝:例程9.Timer PWM应用:蜂鸣器发声如图1.1所示,为EasyARM1138开发板上的蜂鸣器驱动电路。
蜂鸣器类型是交流蜂鸣器,也称无源蜂鸣器,需要输入一列方波才能鸣响,发声频率等于驱动方波的频率。
图1.1 蜂鸣器驱动电路程序清单1.9是Timer模块16位PWM模式的一个应用,可以驱动交流蜂鸣器发声,运行后蜂鸣器以不同的频率叫两声。
其中"buzzer.h"和"buzzer.c"是蜂鸣器的驱动程序,仅有3个驱动函数,用起来很简捷。
程序清单1.9 Timer PWM应用:蜂鸣器发声文件:main.c#include "systemInit.h"#include "buzzer.h"// 主函数(程序入口)int main(void){jtagWait(); // 防止JTAG失效,重要!clockInit(); // 时钟初始化:晶振,6MHzbuzzerInit(); // 蜂鸣器初始化buzzerSound(1500); // 蜂鸣器发出1500Hz声音SysCtlDelay(400* (TheSysClock / 3000)); // 延时约400msbuzzerSound(2000); // 蜂鸣器发出2000Hz声音SysCtlDelay(800* (TheSysClock / 3000)); // 延时约800msbuzzerQuiet( ); // 蜂鸣器静音for (;;){}}文件:buzzer.h#ifndef __BUZZER_H__#define __BUZZER_H__// 蜂鸣器初始化extern void buzzerInit(void);// 蜂鸣器发出指定频率的声音extern void buzzerSound(unsigned short usFreq);// 蜂鸣器停止发声extern void buzzerQuiet(void);#endif // __BUZZER_H__文件:buzzer.c#include "buzzer.h"#include <hw_types.h>#include <hw_memmap.h>#include <sysctl.h>#include <gpio.h>#include <timer.h>#define PART_LM3S1138#include <pin_map.h>#define SysCtlPeriEnable SysCtlPeripheralEnable#define GPIOPinTypeOut GPIOPinTypeGPIOOutput// 声明全局的系统时钟变量extern unsigned long TheSysClock;// 蜂鸣器初始化void buzzerInit(void){SysCtlPeriEnable(SYSCTL_PERIPH_TIMER1); // 使能TIMER1模块SysCtlPeriEnable(CCP3_PERIPH); // 使能CCP3所在的GPIO端口GPIOPinTypeTimer(CCP3_PORT, CCP3_PIN); // 设置相关管脚为Timer功能TimerConfigure(TIMER1_BASE, TIMER_CFG_16_BIT_PAIR | // 配置TimerB为16位PWM TIMER_CFG_B_PWM);}// 蜂鸣器发出指定频率的声音// usFreq是发声频率,取值(系统时钟/65536)+1 ~20000,单位:Hzvoid buzzerSound(unsigned short usFreq){unsigned long ulVal;if ((usFreq <= TheSysClock / 65536UL) || (usFreq > 20000)){buzzerQuiet( );}else{GPIOPinTypeTimer(CCP3_PORT, CCP3_PIN); // 设置相关管脚为Timer功能ulVal = TheSysClock / usFreq;TimerLoadSet(TIMER1_BASE, TIMER_B, ulVal); // 设置TimerB初值TimerMatchSet(TIMER1_BASE, TIMER_B, ulVal / 2); // 设置TimerB匹配值TimerEnable(TIMER1_BASE, TIMER_B); // 使能TimerB计数}}// 蜂鸣器停止发声void buzzerQuiet(void){TimerDisable(TIMER1_BASE, TIMER_B); // 禁止TimerB计数GPIOPinTypeOut(CCP3_PORT, CCP3_PIN); // 配置CCP3管脚为GPIO输出GPIOPinWrite(CCP3_PORT, CCP3_PIN, 0x00); // 使CCP3管脚输出低电平}例程10.Timer PWM应用:蜂鸣器演奏乐曲程序清单1.10是Timer模块16位PWM模式的一个应用,能驱动交流蜂鸣器演奏一首动听的乐曲《化蝶》(乐谱参见图1.2)。
《嵌入式技术》课程标准

《嵌入式技术》课程标准一、课程说明二、课程定位本课程是应用电子技术专业无人机应用技术方向的核心课程、专业必修课程。
先修课程是电子技术基础、单片机原理及应用等课程,后续课程无人机飞行训练、无人机操控。
本课程通过项目式任务驱动方式,采取一体化教学方法,培养学生从事嵌入式技术生产、调试、维护的能力、具备上岗的基本综合专业能力以及可持续发展的社会能力。
三、设计思路本课程是应用电子技术专业无人机应用技术方向的核心课程,是一门实践性强的理论结合实践的课程,要求学生学习本课程之前掌握电子技术、单片机理论知识,且有一定的动手能力即理论联系实践解决实际问题的能力。
本课程的学习按照工学结合的学习模式,以任务为载体,贯彻“做、学、教”的一体化项目教学模式的指导思想,运用项目教学法编制教学项目,使学生“一教就懂,一学就会,一做就成”,符合高职学生的知识水平、能力水平以及职业岗位的需求,充分运用互联网+教育信息化,在网络中开设网络课程及MOOC,为学习后续课程及从事无人机行业打下良好基础。
四、课程培养目标1.专业能力(1)掌握嵌入式系统中硬件层、硬件抽象层、系统软件、应用软件层;312(2)掌握嵌入式开发流程、开发模式;(3)了解嵌入式系统的特点、发展趋势;(4)掌握嵌入式系统的学习方法,了解软件的下载、安装、编程、调试的能力,具备基本项目一定开发的能力。
2.方法能力(1)通过该门课程的学习,掌握嵌入式技术发展的技术,关注嵌入式技术的应用,思考实际应用,解决实际问题的能力,培养终生学习的能力;(2)具备参阅其它电子书籍的能力,具备较强的信息搜索能力;(3)良好的工作协调能力;(4)提高学习兴趣,掌握举一反三的学习方法。
3.社会能力(1)通过课程学习培养学生的信息意识和能力,提高专业实践能力;培养学生的信息意识和信息素养;(2)具有较强的事业心和责任感,具有良好的心理素质和身体素质。
具有理论联系实际的良好学风,具有发现问题、分析问题和解决问题的能力,以及理论联系实际的能力;(3)通过学习养成积极思考问题、自主学习和解决问题的习惯和能力;具备团队协作能力,吃苦耐劳、诚实守信的优秀品质;(4)通过学习学会收集、分析、整理参考资料的技能,培养对新技术信息的掌握能力;(5)爱岗敬业的职业态度与职业责任心。
定时器专题-华为..

定时器专题研究报告(一)——GSM常用定时器华为技术有限公司版权所有侵权必究修订记录目录1概述 (1)2Um接口定时器 (2)2.1CC层 (2)2.1.1MSC侧 (2)2.1.2MS侧 (6)2.2MM层 (8)2.2.1MSC侧定时器 (8)2.2.2MS侧定时器 (9)2.3RR层 (12)2.3.1MSC侧 (12)2.3.2BSC侧 (15)2.3.3MS侧 (22)2.4LAPDm层 (24)2.4.1BTS侧 (24)2.4.2MS侧 (25)3Abis接口定时器 (26)3.1BTSM层 (26)3.1.1BSC侧 (26)3.1.2BTS侧 (28)3.2LAPD层 (29)3.2.1BSC侧 (29)3.2.2BTS侧 (30)4A接口定时器 (32)4.1BSSMAP层 (32)4.1.1MSC侧 (32)4.1.2BSC侧 (34)5Ater接口定时器 (37)5.1BTAP层 (37)5.1.1BSC侧 (37)5.1.2TC侧 (39)附录一:主要流程中的定时器 (40)附录二:GSM系统CC层定义的原因值 (81)关键词:定时器、Um、Abis、Ater、A、CC、MM、RR、BSSMAP、BTAP、BTSM、LAPD、LAPDm 摘要:本文是对GSM BSS系统各接口中主要定时器的研究报告。
文中对各个定时器的作用以及使用条件和策略进行了阐述。
通过对这些定时器的作用及使用方式的阐述和研究,使我们更清楚地了解了各定时器的特性,为今后我们进行网络优化时使用这些定时器来改善网络性能提供了有效的借鉴信息。
缩略语清单:参考资料清单:1、Ericsson:“User Description, Circuit Switched Traffic Timers”2、GSM 03.94、04.08、08.08、08.58等相关协议3、《各种定时器--新疆伊犁网络拥塞问题分析》中研文档4、《GSM原理及其网络优化》韩斌杰编著机械工业出版社定时器专题研究报告(一)概述1 概述GSM系统内设计了大量的定时器和计数器用来对系统的信令或操作流程进行监控,通过这些定时器和计数器的配合和应用,可以使GSM系统的各个接口的同一消息层或不同消息层的信令或操作流程有效地运作起来。
DSP(TMS320C6713)入门之旅二定时器的理解和使用

接着我们上一章(LED灯的点亮)的旅行!上一章我们使用了DSP的GPIO去点亮我们的LED 灯,我们为了让人眼能够直接的感受LED的闪烁我们用到了一个延迟函数。
但是这样的延迟是让CPU空转,while内部的。
当然这样我们不好精确的计算出延迟了多长时间,幸好DSP 内部用一个32bit的定时计数器(其实最简单的单片机里面都会有集成的8bit或者16bit 定时计数器),我们可以使用它来精确的定时。
一般定时计数器有两个功能,一是定时:时钟源一般来源于DSP内部,当然也可以选择来自于外部。
二是计数:我们可以利用它的功能来计算外部脉冲在一段时间内到来的次数,所以叫做计数器(记录外部脉冲的次数)。
因为内部有一个计数的count,如果用作定时就是先输入一个数字,然后在来了一个时钟之后count自动减一。
如果用成计数就是在一个脉冲到来之后count自动加一!DSP6713内部有两个32bit的定时计数器(timer0和timer1),两个基本上是一样的。
我们先来看看定时器的内部构造:大家通过这样的原理框图就可以看出哪些bit影响哪些功能,比如CLKSRC bit就是选择时钟源,为“0”选择TINP脚的和INVINP的异或信号作为时钟源,“1”选择的是CPU内部时钟源,为CPU主频的1/4.我们的DSP主频可以达到450MHz,那么我们的定时器使用的时钟就是112.5MHz。
GO bit就是使能定时器,让定时器开始计数,也就是定时开始信号。
HLD bit 就是暂停和继续计数器控制位。
我们来看看Timer Control Register (CTL)寄存器的的实际用法我们这儿使用的是定时功能,所以我们就把红色标记的几个bit置成“1”,我们先分析一下这几个bit的意义。
一、设置CLKSRC bit位为“1”,这样就使用CPU内部的时钟源,CPU的主频的4分频。
二、设置CP bit位为“1”,这样我时钟源的占空比就为50%了。
DSP(TMS320C6713)入门之旅二定时器的理解和使用

接着我们上一章(LED灯的点亮)的旅行!上一章我们使用了DSP的GPIO去点亮我们的LED 灯,我们为了让人眼能够直接的感受LED的闪烁我们用到了一个延迟函数。
但是这样的延迟是让CPU空转,while内部的。
当然这样我们不好精确的计算出延迟了多长时间,幸好DSP 内部用一个32bit的定时计数器(其实最简单的单片机里面都会有集成的8bit或者16bit 定时计数器),我们可以使用它来精确的定时。
一般定时计数器有两个功能,一是定时:时钟源一般来源于DSP内部,当然也可以选择来自于外部。
二是计数:我们可以利用它的功能来计算外部脉冲在一段时间内到来的次数,所以叫做计数器(记录外部脉冲的次数)。
因为内部有一个计数的count,如果用作定时就是先输入一个数字,然后在来了一个时钟之后count 自动减一。
如果用成计数就是在一个脉冲到来之后count自动加一!
DSP6713内部有两个32bit的定时计数器(timer0和timer1),两个基本上是一样的。
我们先来看看定时器的内部构造
:
大家通过这样的原理框图就可以看出哪些bit影响哪些功能,比如CLKSRC bit就是选择时钟源,为“0”选择TINP脚的和INVINP的异或信号作为时钟源,“1”选择的是CPU内部时钟源,为CPU主频的1/4.我们的DSP主频可以达到450MHz,那么我们的定时器使用的时钟就是112.5MHz。
GO bit就是使能定时器,让定时器开始计数,也就是定时开始信号。
HLD bit就是暂停和继续计数器控制位。
我们来看看Timer Control Register (CTL)寄存器的的实际用法。
arduino定时函数

arduino定时函数Arduino是一种开源的硬件和软件平台,用于制作互动的物理原型。
在Arduino中,定时函数可以用来在指定的时间间隔内执行特定的代码。
下面将详细介绍定时函数的原理和使用方法。
定时函数是用来在设定的时间间隔内执行指定代码的函数。
在Arduino中,使用定时函数可以实现很多功能,如定时采集传感器数据、控制LED灯的闪烁、控制电机的旋转等。
在Arduino中,常用的定时函数有delay(函数和millis(函数。
1. delay(函数:delay(函数用来延迟程序执行的时间。
它的参数是以毫秒为单位的延迟时间。
例如,delay(1000)表示延迟1秒。
在延迟期间,Arduino的处理器将停止执行任何其他代码。
这个函数非常简单易用,但有一个缺点是无法同时进行其他操作。
示例代码:void setu//设置引脚为输出模式pinMode(LED_BUILTIN, OUTPUT);void loo//灯亮1秒digitalWrite(LED_BUILTIN, HIGH);delay(1000);//灯灭1秒digitalWrite(LED_BUILTIN, LOW);delay(1000);上述代码中,通过delay函数使LED灯每隔1秒亮灭一次。
2. millis(函数:millis(函数用来获取自Arduino开启运行到当前时间的毫秒数。
它可以在延迟期间进行其他操作,例如读取传感器数据、执行其他代码等。
示例代码:unsigned long previousMillis = 0;const long interval = 1000;void setu//设置引脚为输出模式pinMode(LED_BUILTIN, OUTPUT);void loounsigned long currentMillis = millis(;//判断是否达到了设定的时间间隔if (currentMillis - previousMillis >= interval)//保存当前时间previousMillis = currentMillis;//执行代码digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));}上述代码中,通过使用millis函数来判断是否达到了设定的时间间隔,并执行相应的代码。
setitimer原理

setitimer原理
setitimer是一个系统调用,用于设置定时器。
它允许用户空
间程序在指定的时间间隔内接收一个信号。
其原理是通过内核定时
器来实现,内核会在指定的时间间隔后向进程发送一个指定的信号。
在Linux系统中,setitimer函数通过向内核注册一个定时器,当
定时器到期时,内核会发送一个SIGALRM信号给进程。
setitimer函数通常用于实现定时任务、超时处理、定时轮询
等功能。
它的原理是基于系统时钟的计时器,当调用setitimer函
数设置定时器后,内核会根据指定的时间间隔进行计时,当时间到
达时,内核会向进程发送一个信号,进程可以捕获该信号并执行相
应的处理逻辑。
在使用setitimer函数时,需要指定定时器类型(实际定时器
或虚拟定时器)、初始计时时间和重复计时时间。
这些参数会影响
定时器的行为,例如定时器是一次性的还是周期性的,以及定时器
的精度和准确性等。
总的来说,setitimer的原理是通过内核提供的定时器机制,
实现对指定时间间隔的计时,并在时间到达时向进程发送信号,从
而实现定时任务和超时处理等功能。
这样可以使程序能够在特定的时间间隔内执行特定的操作,提高了程序的灵活性和可靠性。
3200说明书
定时器操作.................................................................................... 20
第 2 步: 接线 ...................................................................................8
3116 端子排布图........................................................................................ 8 3216 端子排布图........................................................................................ 8 3208 和 3204 端子排布图 .......................................................................... 8 导线尺寸 .................................................................................................... 9 传感器输入 (测量输入)............................................................................... 9 输入/输出 1 和输出 2 ................................................................................. 9 输出 3 ...................................................................................................... 10 输出 4 (AA 继电器) .................................................................................. 10 数字输入 A & B........................................................................................ 10
HAL库的学习——定时器的使用

HAL库的学习——定时器的使用HAL库是一种在嵌入式系统中使用的开发库,它可以为开发者提供很多方便的功能和接口来简化开发过程。
其中,定时器是HAL库中非常重要的一部分,它可以用来实现定时任务、计时、PWM控制等功能。
在HAL库中,定时器的使用需要以下几个步骤:1.初始化定时器:在使用定时器之前,我们需要使用HAL_TIM_Base_Init函数来对定时器进行初始化配置。
首先,我们需要选择要使用的定时器,这可以通过在函数参数中指定TIM_TypeDef类型的变量来实现。
然后,我们需要指定一些配置项,如时钟预分频因子、计数模式、自动重装载寄存器值等。
最后,我们可以调用HAL_TIM_Base_Init函数来进行初始化。
2.配置定时器的中断:如果我们需要通过中断的方式来处理定时器,我们可以使用HAL_TIM_Base_Start_IT函数来使能定时器中断,并在中断回调函数中处理相应的逻辑。
中断回调函数的实现方法可以通过在我们的代码中实现一个名为TIMx_IRQHandler的函数来实现,其中x代表我们选择使用的定时器的编号,如TIM2_IRQHandler。
3.启动定时器:在完成定时器的初始化和中断配置之后,我们可以使用HAL_TIM_Base_Start函数来启动定时器。
4.更新定时器的自动重装载寄存器值:在使用定时器时,我们一般会将定时器的自动重装载寄存器值更新为我们所期望的值,以控制定时器的计数周期。
我们可以使用HAL_TIM_Base_SetAutoreload函数来更新定时器的自动重装载寄存器值。
5.停止定时器:在不需要使用定时器时,我们可以使用HAL_TIM_Base_Stop函数来停止定时器。
除了上述基本操作之外,HAL库还提供了一些其他功能来帮助我们更加灵活地使用定时器。
例如,HAL库提供了HAL_TIM_PeriodElapsedCallback函数来配置一个周期性的回调函数,该回调函数会在每次定时器的自动重装载寄存器值更新时执行。
内部定时器的使用和编程方法
内部定时器是一种在计算机程序中用于控制时间间隔的机制。
在许多编程语言中,内部定时器都可以被用来实现定时任务、延时操作、定时触发事件等功能。
下面我将详细介绍内部定时器的使用和编程方法。
一、内部定时器的使用内部定时器通常是在程序运行过程中,通过设定一个特定的时间间隔,在达到这个时间间隔后自动触发一次事件或执行一段代码。
在许多编程语言中,内部定时器的使用方式都大同小异,下面以Python语言为例介绍内部定时器的使用。
Python中的time模块在Python中,我们可以使用time模块中的sleep()函数和time()函数来实现内部定时器的功能。
首先,我们需要导入time模块:pythonimport time使用sleep()函数实现延时sleep()函数用于使程序暂停指定的秒数。
例如,下面的代码会使程序暂停5秒钟:pythonimport timeprint("开始延时")time.sleep(5) # 暂停5秒钟print("延时结束")使用time()函数获取当前时间戳time()函数返回当前时间的浮点数表示(从1970年1月1日00:00:00开始计算的秒数)。
例如,下面的代码会输出当前时间的浮点数:pythonimport timecurrent_time = time.time()print("当前时间戳:", current_time)二、内部定时器的编程方法内部定时器的编程方法通常包括以下几个步骤:设定时间间隔首先,我们需要设定一个时间间隔,这个时间间隔可以是固定的,也可以是根据程序运行情况动态调整的。
例如,我们可以设定一个固定的时间间隔为5秒钟:pythoninterval = 5 # 时间间隔为5秒钟启动定时器接下来,我们需要启动一个循环,不断地检查当前时间是否达到了设定的时间间隔。
例如,下面的代码使用一个无限循环来实现定时器:pythonimport timeinterval = 5 # 时间间隔为5秒钟while True:# 检查当前时间是否达到了设定的时间间隔if time.time() - current_time >= interval:# 执行定时任务或触发事件等操作print("定时任务执行")current_time = time.time() # 更新当前时间戳else:# 如果未达到设定的时间间隔,则等待一段时间后再次检查time.sleep(0.1) # 等待0.1秒钟后再次检查时间间隔是否达到在上面的代码中,我们使用了一个无限循环来不断检查当前时间是否达到了设定的时间间隔。
boost steady_timer用法

boost steady_timer用法标题: boost库中steady_timer的用法引言:C++的boost库提供了丰富的工具和组件,其中包括了一个用于定时操作的组件steady_timer。
在本文中,我们将一步一步地介绍steady_timer的用法,帮助读者理解并使用这个功能强大的定时器。
一、steady_timer简介steady_timer是boost库中timer模块的一部分,它提供了一种基于时间的触发器,用于在指定的时间点执行代码。
相比于其他的定时器,steady_timer采用了稳定的时间点进行触发,不受系统时间的影响,因此适用于对时间精度要求较高的应用场景。
二、安装boost库使用steady_timer之前,我们需要首先安装boost库。
可以从boost官方网站(三、包含头文件安装完boost库后,我们需要在代码中包含steady_timer的头文件,以便能够使用steady_timer组件。
通常,我们可以使用以下语句来包含头文件:cpp#include <boost/asio.hpp>这个头文件包含了所有boost库中的asio模块,而steady_timer就位于asio 模块中。
四、创建IO服务对象在使用steady_timer之前,我们需要先创建一个IO服务对象(boost::asio::io_service),它用于执行异步操作。
可以使用以下语句来创建IO 服务对象:cppboost::asio::io_service io_service;五、创建steady_timer对象一旦我们创建了IO服务对象,就可以使用它来创建steady_timer对象了。
使用以下语句可以创建一个steady_timer对象:cppboost::asio::steady_timer timer(io_service);这个对象将用于定时触发事件。
六、设置定时器的时间点接下来,我们需要设置定时器的时间点。
setitimer函数

setitimer函数setitimer函数是一个用于设置定时器的系统调用。
它可以用来启动一个定时器,以便在指定的时间间隔内触发信号。
setitimer函数的原型如下:int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value);其中,which参数指定了要设置的定时器类型。
它可以取以下三个值之一:1. ITIMER_REAL:用于设置真实时间定时器,即在指定时间后触发SIGALRM信号。
2. ITIMER_VIRTUAL:用于设置虚拟时间定时器,即在进程进行用户态操作时触发SIGVTALRM信号。
3. ITIMER_PROF:用于设置CPU时间定时器,即在进程占用处理器时间时触发SIGPROF信号。
new_value参数是一个指向itimerval结构体的指针,用于指定新的定时器值。
它包含了定时器的启动时间和间隔时间,以及定时器到期时向进程发送的信号。
old_value参数是一个指向itimerval结构体的指针,用于保存旧的定时器值。
如果不需要保存旧的定时器值,可以将其设置为NULL。
setitimer函数执行成功时返回0,否则返回-1并设置errno变量。
常见的错误代码包括EINVAL(which参数无效)、EFAULT(new_value或old_value参数指向无效的内存地址)和EPERM(进程没有足够的权限设置定时器)等。
在使用setitimer函数时需要注意以下几点:1. 如果同时使用多个定时器,需要分别调用setitimer函数设置不同的which参数。
2. 定时器到期时会向进程发送信号,在信号处理函数中可以编写相应的处理逻辑。
3. 如果在定时器到期前又调用了setitimer函数,之前已经设置的定时器将被取消,新的定时器将取代旧的定时器。
定时器一、精确计时BCB的定时器控件Timer计时精度为55ms,且定时b...b
定时器一、精确计时BCB的定时器控件Timer计时精度为55ms,且定时器的消息在多任务操作系统中的优先级很低,不能得到及时响应,往往不能满足实时控制环境下的应用。
不过微软公司在 Win32 API函数库中已经为用户提供了一组用于高精度计时的底层函数,如果用户使用得当,计时精度可到1ms。
这个计时精度,对于一般的实时系统控制完全可以满足要求。
现将由BCB提供的重新封装后的一组与时间相关的主要接口函数(函数名、参数、功能与Win32 API基本相同)说明如下: 1.DWORD timeGetTime(void)返回从Windows启动开始经过的毫秒数。
最大值为2的32次方,约49.71天。
2.MMRESULT timeSetEvent(UINT uDelay,UINTuResolution,LPTIMECALLBACK lpTimeProc,DWORD dwUser,UINTfuEvent)该函数设置一个定时回调事件,此事件可以是一个一次性事件或周期性事件。
事件一旦被激活,便调用指定的回调函数,成功后返回事件的标识代码,否则返回NULL.参数说明如下:uDelay:以毫秒制定事件的周期。
UResolution:以毫秒指定延时的精度,数值越小定时器事件分辩率越高。
缺省值为1ms.LpTimeProc:指向一个回调函数。
DwUser:存放用户提供的回调数据。
FuEvent:指定定时器事件类型:TIME_ONESHOT:uDelay毫秒后只产生一次事件。
TIME_PERIODIC:每隔uDelay毫秒周期性地产生事件。
3.MMRESULT timeKillEvent(UINT uTimerID)该函数取消一个指定的定时器回调事件。
uTimerID标识要取消的事件(由timeSetEvent函数返回的标识符)。
如果定时器时间不存在则返回MMSYSERR_INVALPARAM。
void CALLBACK TimeProc(UINT uID,UINT uMsg,DWORD dwUser,DWORDdw1,DWORD dw2);该函数是一个应用程序定义的回调函数,出现定时器事件时该函数被调用。
arduino timeinfo 用法

arduino timeinfo 用法millis():该函数返回从Arduino开机启动到当前时刻的毫秒数。
它通常用于计时和延时。
delay():该函数用于暂停程序执行一段时间,参数为毫秒数。
例如,delay(1000)会暂停程序1秒。
delayMicroseconds():该函数用于微秒级的延时,参数为微秒数。
它比delay()函数更加精确,但计时的范围较小。
time():该函数返回当前时间,返回值的范围是1970年1月1日以来的秒数(即Unix 时间戳)。
hour(), minute(), second():这些函数用于获取当前时间的时、分、秒部分。
它们可以与time()函数结合使用,以获取特定时间点的时间信息。
DS1302:Arduino可以通过DS1302实时时钟模块获取精确的时间信息。
该模块内含有一个实时时钟/日历和静态RAM,可以通过简单的串行接口与Arduino进行通信。
DS1302提供了秒、分、时、日、周、月、年的信息,并且每月的天数和闰年的天数可以自动调整。
下面是一个简单的示例,展示如何使用millis()函数和delay()函数实现LED的闪烁:cppint ledPin = 13; // 定义LED连接的引脚为13unsigned long startTime = 0; // 定义起始时间变量void setup() {pinMode(ledPin, OUTPUT); // 设置LED引脚为输出模式}void loop() {unsigned long timeNow = millis(); // 获取当前时间if (startTime == 0) { // 如果未设置起始时间,则设置为当前时间startTime = timeNow;}unsigned long elapsedTime = timeNow - startTime; // 计算经过的时间if (elapsedTime >= 1000) { // 如果经过的时间超过1秒digitalWrite(ledPin, HIGH); // 点亮LEDdelay(500); // 等待半秒digitalWrite(ledPin, LOW); // 熄灭LEDstartTime = timeNow; // 更新起始时间为当前时间}}这个示例中,LED会以1秒的间隔闪烁,每次闪烁的持续时间为半秒。
定时器写延时1ms函数
定时器写延时1ms函数在嵌入式系统中,经常需要进行时间控制。
定时器是一种硬件设备,它可以生成一个周期性的中断信号,我们可以利用这个中断信号来实现定时器功能。
在嵌入式系统中,经常需要进行短时间的延时操作。
为了方便使用,我们可以将常用的延时操作封装成函数。
本篇文章将介绍如何利用定时器编写一个延时1ms的函数。
1. 硬件选型在笔者的开发环境中,采用了STM32F103系列微控制器,选用了其内部的TIM2定时器。
TIM2定时器是一个16位的定时器,它可以配置为不同的工作模式,比如定时器模式、输入捕获模式、PWM输出模式等等。
对于我们要编写的延时函数,采用定时器模式就可以实现。
2. 配置定时器工作模式在使用定时器之前,需要进行一些初始化配置。
我们要配置TIM2定时器为定时器模式,采用内部时钟源这种工作模式,周期为1ms。
初始化代码如下所示:```void Delay_Init(void){// 使能定时器时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);// 定时器配置TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 7200 - 1; // 分频系数=7200,即1us为一个计数单位TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式TIM_TimeBaseInitStruct.TIM_Period = 1000; // 计数周期=1msTIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);// 开始计时TIM_Cmd(TIM2, ENABLE);}```上述代码中,我们首先使能TIM2的时钟,并配置了定时器的工作模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第1章通用定时器(Timer) (1)1.1 Timer总体特性 (1)1.2 Timer功能概述 (2)1.3 Timer库函数 (3)1.4 Timer例程 (11)第1章通用定时器(Timer)表1.1 Timer函数索引函 数 原 型页码void TimerConfigure(unsigned long ulBase, unsigned long ulConfig) 4 void TimerControlStall(unsigned long ulBase, unsigned long ulTimer, tBoolean bStall) 5 void TimerControlTrigger(unsigned long ulBase, unsigned long ulTimer, tBoolean bEnable) 6 void TimerControlEvent(unsigned long ulBase, unsigned long ulTimer, unsigned long ulEvent) 6 void TimerControlLevel(unsigned long ulBase, unsigned long ulTimer, tBoolean bInvert) 6 void TimerLoadSet(unsigned long ulBase, unsigned long ulTimer, unsigned long ulValue) 7 unsigned long TimerLoadGet(unsigned long ulBase, unsigned long ulTimer) 7 unsigned long TimerValueGet(unsigned long ulBase, unsigned long ulTimer) 7 void TimerEnable(unsigned long ulBase, unsigned long ulTimer) 7 void TimerDisable(unsigned long ulBase, unsigned long ulTimer) 8 void TimerRTCEnable(unsigned long ulBase) 8 void TimerRTCDisable(unsigned long ulBase) 8 void TimerQuiesce(unsigned long ulBase) 8 void TimerMatchSet(unsigned long ulBase, unsigned long ulTimer, unsigned long ulValue) 8 unsigned long TimerMatchGet(unsigned long ulBase, unsigned long ulTimer) 9 void TimerPrescaleSet(unsigned long ulBase, unsigned long ulTimer, unsigned long ulValue) 9 unsigned long TimerPrescaleGet(unsigned long ulBase, unsigned long ulTimer) 9 void TimerIntEnable(unsigned long ulBase, unsigned long ulIntFlags) 9 void TimerIntDisable(unsigned long ulBase, unsigned long ulIntFlags) 10 void TimerIntClear(unsigned long ulBase, unsigned long ulIntFlags) 10 unsigned long TimerIntStatus(unsigned long ulBase, tBoolean bMasked) 10 void TimerIntRegister(unsigned long ulBase, unsigned long ulTimer, void (*pfnHandler)(void)) 10 void TimerIntUnregister(unsigned long ulBase, unsigned long ulTimer) 111.1 Timer总体特性在Stellaris系列ARM内部通常集成有2~4个通用定时器模块(General-Purpose Timer Module,GPTM),分别称为Timer0、Timer1、Timer2和Timer3。
它们的用法是相同的:每个Timer模块都可以配置为一个32位定时器或一个32位RTC定时器;也可以拆分为两个16位的定时/计数器TimerA和TimerB,它们可以被配置为独立运行的定时器、事件计数器或PWM。
Timer模块具有非常丰富的功能:z32位定时器模式:可编程单次触发(one-shot)定时器可编程周期(periodic)定时器实时时钟RTC(Real Time Clock)软件可控的事件暂停(用于单步调试时暂停计数,RTC模式除外)z16位定时器模式:带8位预分频器的通用定时器功能可编程单次触发(one-shot)定时器可编程周期(periodic)定时器软件可控的事件暂停z16位输入捕获模式:输入边沿计数捕获输入边沿定时捕获z16位PWM模式:用法简单的PWM(Pulse-Width Modulation,脉宽调制)模式可通过软件实现PWM信号周期、占空比、输出反相等的控制1.2 Timer功能概述Timer模块的功能在总体上可以分成32位模式和16位模式两大类。
在32位模式下,TimerA和TimerB被连在一起形成一个完整的32位计数器,对Timer的各项操作,如装载初值、运行控制、中断控制等,都用对TimerA的操作作为总体上的32位控制,而对TimerB 的操作无任何效果。
在16位模式下,对TimerA的操作仅对TimerA有效,对TimerB的操作仅对TimerB有效,即对两者的操控是完全独立进行的。
每一个Timer模块对应两个CCP管脚。
CCP是“Capture Compare PWM”的缩写,意为“捕获/比较/脉宽调制”。
在32位单次触发和周期定时模式下,CCP功能无效(与之复用的GPIO管脚功能仍然正常)。
在32位RTC模式下,偶数CCP管脚(CCP0、CCP2、CCP4等)作为RTC时钟源的输入,而奇数CCP管脚(CCP1、CCP3、CCP5等)无效。
在16位模式下,计数捕获、定时捕获、PWM功能都会用到CCP管脚,对应关系是:Timer0A对应CCP0、Timer0B对应CCP1,Timer1A对应CCP2、Timer1B对应CCP3,依此类推。
1.32位单次触发/周期定时器在这两种模式中,Timer都被配置成一个32位的递减计数器,用法类似,只是单次触发模式只能定时一次,如果需要再次定时则必须重新配置,而周期模式则可以周而复始地定时,除非被关闭。
在计数到0x00000000时,可以在软件的控制下触发中断或输出一个内部的单时钟周期脉冲信号,该信号可以用来触发ADC采样。
2.32位RTC定时器在该模式中,Timer被配置成一个32位的递增计数器。
RTC功能的时钟源来自偶数CCP管脚的输入。
在LM3S101/102里,RTC时钟信号从专门的“32KHz”管脚输入。
输入的时钟频率应当为精准的32.768KHz,在芯片内部有一个RTC专用的预分频器,固定为32768分频。
因此最终输入到RTC计数器的时钟频率正好是1Hz,即每过1秒钟RTC计数器增1。
RTC计数器从0x00000000开始计满需要232秒,这是个极长的时间,有136年!因此RTC真正的用法是:初始化后不需要更改配置(调整时间或日期时例外),只需要修改匹配寄存器的值,而且要保证匹配值总是超前于当前计数值。
每次匹配时可产生中断(如果中断已被使能),据此可以计算出当前的年月日、时分秒以及星期。
在中断服务函数里应当重新设置匹配值,并且匹配值仍要超前于当前的计数值。
注意:在实际应用当中一般不会真正采用Timer模块的RTC功能来实现一个低功耗万年历系统,因为芯片一旦出现复位或断电的情况就会清除RTC计数值。
取而代之的是冬眠模块(Hibernation Module)的RTC功能,由于采用了后备电池,因此不怕复位和VDD断电,并且功耗很低。
3.16位单次触发/周期定时器一个32位的Timer可以被拆分为两个单独运行的16位定时/计数器,每一个都可以被配置成带8位预分频(可选功能)的16位递减计数器。
如果使用8位预分频功能,则相当于24位定时器。
具体用法跟32位单次触发/周期定时模式类似,不同的是对TimerA和TimerB 的操作是分别独立进行的。
4.16位输入边沿计数捕获在该模式中,TimerA或TimerB被配置为能够捕获外部输入脉冲边沿事件的递减计数器。
共有3种边沿事件类型:正边沿、负边沿、双边沿。
该模式的工作过程是:设置装载值,并预设一个匹配值(应当小于装载值);计数使能后,在特定的CCP管脚每输入1个脉冲(正边沿、负边沿或双边沿有效),计数值就减1;当计数值与匹配值相等时停止运行并触发中断(如果中断已被使能)。
如果需要再次捕获外部脉冲,则要重新进行配置。
5.16位输入边沿定时捕获在该模式中,TimerA或TimerB被配置为自由运行的16位递减计数器,允许在输入信号的上升沿或下降沿捕获事件。
该模式的工作过程是:设置装载值(默认为0xFFFF)、捕获边沿类型;计数器被使能后开始自由运行,从装载值开始递减计数,计数到0时重装初值,继续计数;如果从CCP管脚上出现有效的输入脉冲边沿事件,则当前计数值被自动复制到一个特定的寄存器里,该值会一直保存不变,直至遇到下一个有效输入边沿时被刷新。
为了能够及时读取捕获到的计数值,应当使能边沿事件捕获中断,并在中断服务函数里读取。
6.16位PWMTimer模块还可以用来产生简单的PWM信号。
在Stellaris系列ARM众多型号当中,对于片内未集成专用PWM模块的,可以利用Timer模块的16位PWM功能来产生PWM信号,只不过功能较为简单。
对于片内已集成专用PWM模块的,但仍然不够用时,则可以从Timer模块借用。
在PWM模式中,TimerA或TimerB被配置为16位的递减计数器,通过设置适当的装载值(决定PWM周期)和匹配值(决定PWM占空比)来自动地产生PWM方波信号从相应的CCP管脚输出。