§8.7 用z变换解差分方程.
Z变换和差分方程

经常用于分析计算机系统的稳态误差!!
5、超前定理
n F ( z ) f ( nT ) z 则: 设函数f(t)的 Z变换为 n 0
Z [ f (t kT )] z F ( z ) z
k
k
n 0
n 1
f (nT ) z n
若
f (0) f (T ) f [(k 1)T ] 0 则:
k
求: y ( k )
• 解: • 将方程中除 y(k)以外的各项都移到等号右边, • 得: y(k ) 3 y(k 1) 2 y(k 2) f (k )
• 对于 k 2, 将已知初始值 y(0) 0, y(1) 2代入上式,得:
y(2) 3 y(1) 2 y(0) f (2) 2
第三节
差分方程
差分方程是包含关于变量 k 的序列y(k) 及其各阶差分的方程式。 是具有递推关系的代数方程,若已知初始 条件和激励,利用迭代法可求差分方程的数值 解。
差分方程的定义:
对于单输入单输出线性定常系统,在某一采样时 刻的输出值 y(k) 不仅与这一时刻的输入值 r(k)有 关,而且与过去时刻的输入值r(k-1)、 r(k-2)…有 关,还与过去的输出值y(k-1)、 y(k-2)…有关。可 以把这种关系描述如下:
i 1
n
i 1 n
函数线性组合的Z变换,等于各函数Z变换的线性组合。
2、滞后定理
设在t<0时连续函数f(t)的值为零,其Z变换为F(Z)则:
Z[ f (t kT )] z k F ( z)
原函数在时域中延迟几个采样周期,相当于在象函数上乘以z-k, 算子z-k的含义可表示时域中时滞环节,把脉冲延迟k个周期。
z变换求解差分方程步骤
z变换求解差分方程步骤嘿,咱今儿就来讲讲这用 z 变换求解差分方程的步骤哈。
这可就像是解开一道神秘的谜题呢!你想想,差分方程就像是一个调皮的小精灵,藏着好多秘密等我们去发现。
而 z 变换呢,就是那把神奇的钥匙啦。
首先呢,得把差分方程给它表示清楚咯,可不能模模糊糊的。
就像你要找东西,总得先知道要找啥样的不是?然后对这个差分方程进行 z 变换,这就好比给它施了个魔法,一下子就变得不一样啦。
在这个过程中啊,你得细心点儿,可别弄错啦。
这就跟走迷宫似的,一步错步步错呀。
接着呢,就会得到一个关于 z 的表达式,这可就是我们前进的线索呢。
然后呢,咱得把这个表达式给它化简化简,把那些复杂的东西都去掉,就像给苹果削皮一样,让它露出最精华的部分。
这时候可就考验咱的本事啦,得有耐心,还得有那么点儿小技巧。
再接下来呀,就得求解啦!这就像是终于找到了宝藏的位置,要把它挖出来一样。
把 z 的值求出来,这可不容易呢,但咱不能怕呀,要勇往直前!等求出了 z 的值,可别以为就大功告成咯。
还得把它变回原来的世界,也就是反变换回去。
这就像是把变了形的东西再变回来,可神奇啦。
哎呀,你说这过程是不是挺有意思的?就好像是一场冒险,每一步都充满了挑战和惊喜。
你要是能熟练掌握这 z 变换求解差分方程的步骤,那可就厉害咯,就像是拥有了超能力一样!你想想,以后遇到那些复杂的差分方程,别人都抓耳挠腮不知道咋办的时候,你就能轻松搞定,那多牛呀!这就好比别人还在走路,你都开上小汽车啦,一下子就把他们甩在后面啦。
所以呀,可得好好学这 z 变换求解差分方程的步骤哦,别偷懒,多练练,肯定能掌握得牢牢的。
到时候,不管啥样的难题都难不倒你啦!这多棒呀,是不是?。
差分方程的求解
计算机控制技术课程讲义
17
4.6 方框图及其分析
脉冲传递函数也可用方块图表示,增加一个部件 —— 采样开关
4.6.1 采样开关位置与脉冲传递函数的关系
1、连续输入,连续输出 2、连续输入,离散输出 3、离散输入,离散输出 4、离散输入,连续输出
例:方框图分析
例1、例2、
计算机控制技术课程讲义 18
计算机控制技术课程讲义 2
做Z反变换,由于 Y ( z) 1 1 1 2 z z 3z 2 z 1 z 2 z z 则Y ( z ) z 1 z 2 查Z变换表可得 y (k T) Z 1[Y ( z )] (1) k (2) k , k 0,1,2,...
两个环节中间无采样开关时
a z (1 e aT ) G ( z ) Z [G1 ( s )G2 ( s )] Z s ( s a ) ( z 1)( z e aT )
G1 ( z )G2 ( z ) G1G2 ( z )
计算机控制技术课程讲义 13
T
Y (s)
D( z ) G1 ( z ) R( z ) Y ( z ) G2 ( z ) D( z ) G1 ( z )G2 ( z ) R( z )
Y ( z) G( z) G1 ( z )G2 ( z ) R( z )
计算机控制技术课程讲义
脉冲传递函数等于两个环 节的脉冲传递函数之积。
但是,对离散系统而言,串联环节的脉冲传递函数不 一定如此,这由各环节之间有无同步采样开关来确定
计算机控制技术课程讲义
10
二、离散系统串联环节 1、串联各环节之间有采样器的情况
G( z)
G1 ( z ) G2 ( z )
差分方程的Z变换解
其中: 其中:
。
14
实验步骤与方法
用ztrans、iztrans求实验内容1和2。在命令窗口求解 ztrans、iztrans求实验内容 求实验内容1 即可。 即可。 在例3 计算的是前向差分方程。但实验内容3 (a)是 在例3中,计算的是前向差分方程。但实验内容3 (a)是 后向差分方程。所以要仿照例3的程序和Z 后向差分方程。所以要仿照例3的程序和Z变换求解后 向差分方程的原理编写用z 向差分方程的原理编写用z变换计算前向差分方程的零 输入响应,零状态响应,全响应的程序。 输入响应,零状态响应,全响应的程序。 仿照例3的方法,完成实验内容3的编程。 仿照例3的方法,完成实验内容3的编程。上机调试程 序,与理论计算结果比较。 与理论计算结果比较。 由于实验内容4有复数极点, 由于实验内容4有复数极点,用符号运算的方法就不能 计算。这需要用部分分式法和Z 计算。这需要用部分分式法和Z变换解差分方程的原理 来完成实验内容4的编程。(提高实验) 来完成实验内容4的编程。(提高实验) 。(提高实验
4
实验原理与说明
3、差分方程的Z变换解 差分方程的Z 若线性常系数差分方程描述的系统为: 若线性常系数差分方程描述的系统为:
(1)已知零输入初始值 对上式两边取 变换有: 变换有:
和
上式的第一项为零输入响应,第二项为零状态响应。 上式的第一项为零输入响应,第二项为零状态响应。
5
实验原理与说明
(2)已知系统初始值 对原方程式两边取
10
实验内容 1
求下列序列的变
(a) (b)
换,并注明收敛域。 并注明收敛域。
(c) (d)
11
实验内容 2
求下列
Z域变换分析方法
1 2 1
第8章 Z变换
(2 z 2.6)z 代入初始条件,整理得 : Y ( z ) 2 z 0.7 z 0.1 Y ( z) (2 z 2.6) 12 10 z ( z 0.2)(z 0.5) ( z 0.5) ( z 0.2)
例8-10: 已知某离散LTI系统的单位阶跃响应为:
s[n] (2 3 5 10)u[n]
n n
(1)求系统单位抽样响应 (2)求此二阶差分方程
解: ( 1)
h[n] s[n] s[n 1] 1 n 12 n ( 2 5 )u[n] 11.1 [n] 2 5稳定系统全部极点就一定是位于单位圆内的呢?
第8章 Z变换
三、由极点分布决定系统稳定性 系统稳定的充要条件是单位样值响应绝对可和。即:
n
h( n )
因果稳定系统的充要条件为 :h(n)是单边的而且是有 界的。即: 因果
稳定
h(n) h(n)u (n) 非因果也 可以稳定 h( n) a<1 n
一、系统函数的求取 定义一:系统单位样值响应h[n]的Z变换
激励与单位样值响应的卷积为系统零状态响应
y[n] x[n] h[n]
由卷积定理
Y ( z) X ( z)H ( z)
Y ( z) H ( z) X ( z)
H ( z ) h[n]z
n 0
n
第8章 Z变换
定义二:系统零状态响应的Z变换与输入的Z变换之比 若x(n)是因果序列, 则在系统零状态下:
利用z变换解差分方程

于是
Y(z) =
br z−r ∑ ak z−k ∑
k= 0 M r= 0 N
M
X(z)
令
H(z) =
∑b z
r r= 0 N k= 0
−r
ak z−k ∑
则
Y(z) = X (z)H(z)
−1
此时对应的序列为 y(n) = F [X(z)H(z)]
差分方程为 例:若描述离散系统的 1 1 y(n) + y(n −1) − y(n − 2) = x(n) 2 2 x(n) = 2n u(n) , y( 已知激励 初始状态 −1) =1, y(−2) = 0, 求系统的零输入响应、 零状态响应和全响应。 求系统的零输入响应、 零状态响应和全响应。
ak z−k [Y(z) = ∑br z−r [X(z) + ∑x(m)z−m] ∑
k= 0 r= 0 m=−r N M −1
如果激励x(n)为因果序列, 如果激励x(n)为因果序列,上式可以写成 x(n)为因果序列
ak z−k [Y(z) = ∑br z−r X(z) ∑
k= 0 r= 0 N M
8.5节已经给出利用 节已经给出利用z 在8.5节已经给出利用z变换解差分方程的简 单实例,本节给出一般规律。 单实例,本节给出一般规律。这种方法的原 理是基于z变换的线性和位移性, 理是基于z变换的线性和位移性,把差分方程 转化为代数方程,从而使求解过程简化。 转化为代数方程,从而使求解过程简化。
k= 0 l =−k r= 0 m=−r −1
若激励x(n)=0,即系统处于零输入状态,此时 若激励x(n)=0,即系统处于零输入状态, x(n)=0,即系统处于零输入状态 差分方程( 差分方程(1)成为齐次方程∑a y(n −源自) =0k=0 kN
差分方程及其Z变换法求解
例1:右图所示的一阶系统描述它的微分方程为
y(t ) Ke(t ) K (r (t ) y(t ))
y(t ) Ky(t ) Kr (t )
用一阶前向差分方程近似:
(1)
r( t ) e( t ) -
K
1/s
y( t )
y (k 1)T y (kT ) dy y (t ) lim dt T 0 T
由图:x1 (k 1)T x2 (kT )
zX 1 ( z ) zx1 (0) X 2 ( z )
x2(kT)
z
1
x1(kT)
z 1
x1(0) 1
x1 ( z)
x2(z) y[(k+1)T]
例2:画出例2所示离散系统的模拟图
y[(k 1)T ] -( KT -1) y(kT ) + KTr (kT ) r(kT)
y (k 1)T y (kT ) T
(T 很小)
(2)
式中:T为采样周期,(2)代入(1)得:
y (k 1)T (KT 1) y(kT ) KTr(kT )
y(k 1) ( K 1) y(k ) Kr (k )
(3)
二、离散系统差分方程的模拟图
连续系统采用积分器s-1作为模拟连续系统微分方程的主要器件; 与此相对应,在离散系统中,采用单位延迟器z-1。 单位延迟器:把输入信号延迟一个采样周期T秒或延迟1拍。
再利用初始条件,逐次迭代得到各采样时刻的值。
特点:适用于计算机处理求解。 例3:用迭代法解二阶差分方程 y(k+2) +3y(k+1)+2y(k)=1(k)
利用初始条件 y(0)=0, y(1)=1,则有: y(k+2) =-3y(k+1) -2y(k)+1(k) y(2) =-3y(1) -2y(0)+1(0)= -3*1-2*0+1= -2
信号与系统第八章_离散时间系统的z域分析2(青大)
z =1
∫
X (e jω )e jnω d ω
1 π x(n) = IDTFT[ X (e )] = X (e jω )e jnωdω 2π ∫−π
X (e jω ) = X (e jω ) e jϕ(ω)
X (e jω ) ——序列 x(n)的幅度频谱 序列
以 2π为周期 的周期函数
ϕ(ω) ——序列 x(n)的相位频谱 序列
⇒ h(n) 等幅,系统临界稳定; 等幅,系统临界稳定;
(3)有极点在单位圆外,或单位圆上有二阶或二阶以上极点 有极点在单位圆外,
⇒ h(n) 增长,系统不稳定。 增长,系统不稳定。
例:判断系统的因果性和稳定性。 系统的因果性和稳定性。
z , z > 0.5 (1) H ( z ) = z − 0.5
例1:求 x(n) = u (n) − u (n − 5) 的DTFT,并画出幅度频谱。 ,并画出幅度频谱。 解:X (e ) = DTFT[x(n)] = ∑e
jω n=0 4 − jnω
− j 5ω
1− e = e− j 2ω = ω 1− e− jω sin( )
5
sin(
5ω ) 2 2
5ω sin( ) jω 2 X (e ) = ω sin( ) 2
ω
1 ( ) 4
xs (t)
T =1
0
x(n)
4
−4
t
1
F [ xs (t )] = DTFT[x(n)]
1 4
⋯
4
−2π
−π − ω c
ωc
π
2π
⋯ω
−4
0
n
(三)DTFT的基本性质 的基本性质
(1)线性 (2)时移 (3)频移
Z变换和差分方程

• 引入变量: 引入变量:
z=e
Ts
sT s
或者写成: s = 1 ln z 或者写成:
S: 拉普拉斯变换的算子; Ts:采样周期; 拉普拉斯变换的算子; Ts:采样周期 采样周期; 一个复变量, 平面上, 变换算子, Z:一个复变量,定义在 Z 平面上,称为 Z 变换算子, 记为:采样信号的Z变换: 记为:采样信号的Z变换:Z[f*(t)] = F(z) 变换, F (z)是采样脉冲序列的 Z变换, 它只考虑了采样时刻的信号值。 它只考虑了采样时刻的信号值。
y ( 0 ) = 0 , y (1) = 2 , 激励 f ( k )= 2 k ε ( k ),
求: y (k )
• 解: • 将方程中除 y(k)以外的各项都移到等号右边, 以外的各项都移到等号右边, • 得: y (k ) = −3 y (k − 1) − 2 y (k − 2) + f (k ) • 对于 k = 2, 将已知初始值y (0) = 0, y (1) = 2代入上式,得:
s z 1 z R2 = lim ( s + jω ) = sT s → − jω ( s − jω )( s + jω ) z − e 2 z − e − jωT
例8—6 求
解:
f ( t ) = t 的Z变换
两阶重极点!! 两阶重极点!!
1 F (s) = 2 s
d z d z Tz 2 1 R = lim (s − 0) 2 = lim = sT sT 2 s →0 ds s →0 ds z − e s z −e ( z − 1)
c ( k ) = (1 − T ) k c ( 0 ) + T
∑
利用z变换解差分方程 ppt课件

利用z变换解差分方程
6
于是 令 则
M
br z r
Y(z)
r=0 N
X (z)
ak zk
k=0
M
br z r
H (z)
r=0 N
ak zk
k=0
Y(z)X(z)H (z)
此时对应的序列为 F y(n) 1[X(z)H (z)]
利用z变换解差分方程
7
例: 已知系统的差分方达程式表为
y(n)0.9y(n1) 0.05u(n) 若边界条y件(1) 1,求系统的完全响应。
5
若系统的起始状态y(l)=0(-N≤l≤-1),即系统处于 零起始状态,此时式(2)变成
N
M
1
a kz k[Y (z)b rz r[X (z) x (m )z m ]
k = 0
r= 0
m r
如果激励x(n)为因X(z)
k= 0
r= 0
利用z变换解差分方程
3
线性常系数差分一方般程形的式为
N
M
ak y(nk) brx(nr)
k0
r0
(1)
将 等 式 两 边 取 换单 ,边 利z用变z 变性换得位 移 特
N
1
M
1
akzk[Y(z) y(l)zl] brzr[X(z) x(m)zm] (2)
k=0
lk
r=0
mr
利用z变换解差分方程
§7.7 利用z变换解差分方程
• 主要内容
•z变换解差分方程的一般步骤 •举例说明
• 重点:利用z变换解差分方程的一般步骤
利用z变换解差分方程
1
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
8.07 用z变换解差分方程
x n
1 E
3
1 E 1 E
y n
2
yn xn xn 1 3 yn 1 2 yn 2
(2)用z变换求解需要 y 1 , y 2 , 用 y 1 , y 0 由方 程迭代出 1 5 y 1 , y 2 2 4
§8.7 用z 变换解差分方程
序言
描述离散时间系统的数学模型为差分方程。求解 差分方程是我们分析离散时间系统的一个重要途径。 求解线性时不变离散系统的差分方程有两种方法: •时域方法——第七章中介绍,烦琐 •z变换方法 •差分方程经z变换→代数方程; •可以将时域卷积→频域(z域)乘积; •部分分式分解后将求解过程变为查表; •求解过程自动包含了初始状态(相当于0-的 条件)。
yn 3 yn 1 2 yn 2 xn xn 1
(3)差分方程两端取z变换,利用右移位性质
Y z 3 z 1Y z y 1 2 z 2Y z z 1 y 1 y 2 z z 1 x 1 0 1 z z2 z2
z z Y z 0.5 0.45 z 1 z 0.9
A1 A2 Y z z z 1 z 0.9
yn 0.5 0.45 0.9
n
n 0
例8-7-2
已知系统框图
列出系统的差分方程。 2n n 0 , y 0 y 1 0, x n 0 n0 求系统的响应 y(n)。 解: (1) 列差分方程,从加法器入手
Yzi z 1 3z 1 2z 2 2z 1 y 1 3 y 1 2 y 2
z z 1 3z 2z Yzi z z 2z 1 z 2 z 1 零输入响应为
用单边Z变换解差分方程
n
h( n)
15
可以稳定
x ( n)
h( n)
k
y(n) x(n) * h(n)
h(k ) x(n k )
x(n) M
y ( n)
k
h ( k ) x ( n k ) M h( k )
k
k x ( k ) z
1 m k k z x ( k ) z x ( k ) z k m k 0 1 m k z X ( z ) x(k ) z k m
4
(4)对于因果序列x(n)
k m k x ( k ) z 0 1
1 2 2
10 z Y ( z ) 0.1z [Y ( z ) zy (1)] 0.02 z [Y ( z ) z y (2) zy (1)] z 1 10 z (1 0.1z 1 0.02 z 2 )Y ( z ) 0.08 z 1 0.28 z 1
2 1
yss (n) B sin[n 2 ( )]
28
Y (e ) H (e ) j X (e )
j
j
H (e ) H (e ) e B H (e ) A
j
j
j
j ( )
B j[ 2 ( ) 1 ( )] e A
( ) 2 ( ) 1 ( )
§8.7 用单边Z变换解差分方程
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
1
(一)复习Z变换的位移特性
若x(n)分别是双边序列、双边左移序列、 双边右移序列时,它们的双边和单边Z变 换是不同的: (1)双边序列的双边Z变换(p79-p83)
z变换 积分 差分
z变换积分差分全文共四篇示例,供读者参考第一篇示例:【z变换积分差分】是信号与系统分析中常用的三种重要方法,它们在数字信号处理和控制系统中起到关键作用。
本文将介绍和比较这三种方法的原理、特点和应用。
1. z变换z变换是一种离散时间信号的分析方法,它类似于拉普拉斯变换用于连续时间信号的分析。
z变换将离散信号变换为z域中的函数,其中z是一个复数变量。
通过z变换可以将差分方程表示为代数方程,从而方便进行信号的频域分析和系统设计。
在z变换中,信号x(n)的z变换定义为:X(z) = Σ(x(n) * z^(-n)), n = 0, 1, 2, ...其中X(z)是信号x(n)的z变换,n是离散时间序列。
z变换的性质包括线性性、时移性、频率移位性、共轭性等。
通过这些性质,可以方便地对信号和系统进行分析。
z变换在数字信号处理中应用广泛,例如数字滤波、频域分析、数字控制系统等都离不开z变换的支持。
2. 积分在信号与系统中,积分是一种对信号进行求和的操作,可以将连续信号或离散信号进行积分得到一个新的信号。
积分在信号处理和系统控制中有着重要的作用,能够实现信号的平滑、去噪和特征提取等功能。
对于连续信号,积分的定义为:∫f(t)dt积分算子常用于信号的平滑和去噪处理,可以消除信号中的高频组分和噪声,提取信号的低频特征。
在控制系统中,积分常用于实现系统的稳定性、误差消除和跟踪功能,是PID控制器中的一个重要组成部分。
3. 差分f(n+1) - f(n)差分算子常用于信号的导数计算、特征提取和系统建模等领域,可以实现信号的变化率和变化趋势的分析。
在数字信号处理中,差分算子也被广泛应用于信号去噪、特征提取、运动检测等领域,是数字图像处理和视频处理中的重要工具。
z变换、积分和差分是信号与系统分析中常用的三种方法,它们在数字信号处理和控制系统中有着重要作用。
通过对这三种方法的深入理解和灵活运用,可以实现信号处理和系统设计的高效和精确。
z变换到差分方程
z变换到差分方程z变换(Z-transform)是一种在数字信号处理中广泛应用的数学工具,用于将离散时间域中的信号转换为连续时间域中的信号,从而更方便地对信号进行分析与处理。
通常情况下,我们可以将差分方程(difference equation)通过Z变换来求解,从而得到其对应的Z变换函数(Z-transform function)。
具体地说,对于给定的差分方程:y(n) + a1*y(n-1) + a2*y(n-2) + ... + ak*y(n-k) = b0*x(n) + b1*x(n-1) + b2*x(n-2) + ... + bm*x(n-m)其中,y(n)和x(n)分别表示输出和输入信号在时间点n的取值,a1、a2、…、ak和b0、b1、…、bm为常数系数,k和m为差分方程的阶数。
我们可以通过将差分方程中的所有项进行变换,得到其对应的Z变换函数:Y(z) + a1*Y(z)*z^{-1} + a2*Y(z)*z^{-2} + ... + ak*Y(z)*z^{-k} =b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... + bm*X(z)*z^{-m}其中,Y(z)和X(z)分别表示输出和输入信号的Z变换函数,z^{-n}表示Z域中的时间延迟,也可以将其视为离散时间域中的退化因子,它对应的函数形式为z^{-n} = e^{-jwn},其中w为频率。
通过对上述等式进行变换和整理,我们可以将Y(z)和X(z)表示为如下形式:Y(z) = [b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... +bm*X(z)*z^{-m}] / [1 + a1*z^{-1} + a2*z^{-2} + ... + ak*z^{-k}]X(z) = [X(z) + X(z)*z^{-1} + X(z)*z^{-2} + ... + X(z)*z^{-m}] / [m0 + b1*z^{-1} + b2*z^{-2} + ... + bm*z^{-m}]其中,Y(z)表示差分方程的输出信号的Z变换函数,X(z)表示差分方程的输入信号的Z变换函数。
Z变换详细讲解2
f (t)
j
F
(s)e
st
ds
由于z esT , dz Te sT
Tz
j
ds
f (t) f (nT ) f (n)
F (s) f (n)z n F (z) n
e sT e snT z n
ds 1 dz dz Tz z
j
j
c
10
f (n) 1 F (z)z n1dz 令z re j
n0
zm x(n m)z(nm) zm x(k)zk
n0
k m
zm
x(k ) z k
m1
x(k ) z k
k 0
k 0
zm
X
(z)
m1
x(k ) z k
k 0
15
(3)双边右移序列旳单边Z变换
X (z) x(n)u(n)zn n0
ZT[x(n m)u(n)] x(n m)zn
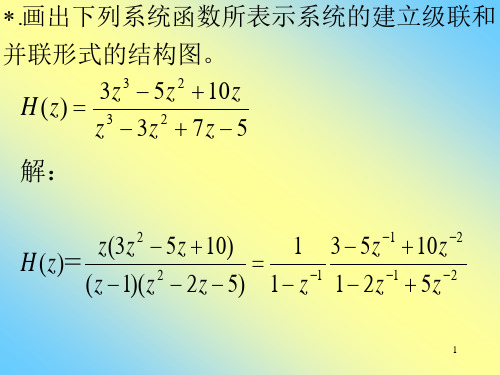
.画出下列系统函数所表示系统的建立级联和 并联形式的结构图。
H (z) 3z3 5z 2 10z z3 3z2 7z 5
解:
H
(
z
)=
(
z z
(3z 2 1)(
z2
5z 10) 2z 5)
1 1 z 1
3 5z 1 1 2z 1
10z 2 5z2
1
H (z)
1 1 z1
br z r
r 0
N
ak zk
k 0
请注意这里 与解差分有 何不同?
因果!
22
(2)定义二:系统单位样值响应h(n) 旳Z变换
• 鼓励与单位样值响应旳卷积为系统零状
态响应
y(n) x(n)*h(n)