差分方程的Z变换解
§5-4_差分方程的z变换解法
Q X( z ) =
z
1 z− 4 1 2 z 2 ∴ Y ( z) = 1 1 ( z + )( z − ) 2 4
1 2 X ( z) ∴ Y ( z) = 1 −1 1+ z 2 1 z Y ( z) 2 = 1 1 z ( z + )( z − ) 2 4
= 1 3 z+ 1 2 + 1 6 z− 1 4
求反z变换 求反 变换
2 5 1 1 n n n ∴ y(n) = [− (0.2) + (0.5) + (0.2) + (0.5) n ]u (n) 3 3 5 2
零状态响应 零输入响应
= [−
7 13 (0.2) n + (0.5) n ]u (n) 15 6
自由响应
与拉氏变换解微分方程类似, 变换解差分方程可以一次求 与拉氏变换解微分方程类似,用z变换解差分方程可以一次求 出系统的全解。同样因为带有起始条件,使运算繁杂。 出系统的全解。同样因为带有起始条件,使运算繁杂。
N
设差分方程为: 设差分方程为: 两边同求z变换: 两边同求 变换: 变换
∑a
k =0
N k =0
k
y (n − k ) = ∑ br x(n − r )
r =0
−1 −k
M
∑a z
k
[Y ( z ) +
n= − k
∑ y ( n) z
−n
] = ∑ br z − r X ( z )
r =0
M
《Signals & Systems》 》
1 y (n) + y (n − 1) = 0 2
系统方程求z变换 系统方程求 变换
matlab用z变换求解差分方程
matlab用z变换求解差分方程Z变换是一种非常重要的信号分析工具,在MATLAB中,可以使用Symbolic Math Toolbox进行Z变换的计算和求解差分方程。
Z变换是一种将离散时间信号从时间域转换到复平面域的方法。
它与拉普拉斯变换的关系类似,但适用于离散时间信号的分析。
在MATLAB 中,使用syms函数创建符号变量来表示Z变换的变量,然后使用ztrans函数进行Z变换的计算和求解差分方程。
下面将通过一个简单的例子来说明如何使用MATLAB进行Z变换求解差分方程。
假设有一个差分方程:y[n]-0.5y[n-1]+0.25y[n-2]=x[n]首先,使用syms函数创建符号变量:syms z定义输入信号和初始条件:x=z^2;%输入信号y0=1;%初始条件y[-1]y1=0;%初始条件y[-2]然后,使用ztrans函数进行Z变换计算:Y = ztrans(y[n], n, z);X = ztrans(x, n, z);差分方程中的Y和X分别表示Y(z)和X(z),因此可以写出差分方程的Z变换方程:Y-0.5*z^(-1)*Y+0.25*z^(-2)*Y=X然后,将方程转化为Y(z)的表达式:Y = solve(Y - 0.5*z^(-1)*Y + 0.25*z^(-2)*Y == X, Y);至此,Z变换方程求解完成,可以使用ilaplace函数从Z域转换回时间域,以获得Y[n]的表达式:y = ilaplace(Y, z, n);最后,可以将结果绘制出来:n=-10:10;%时间范围y_n = subs(y, n, n); % 计算y[n]的值stem(n, y_n); % 绘制离散时间信号综上所述,我们可以使用MATLAB的Symbolic Math Toolbox进行差分方程的Z变换求解,这对于信号分析和系统设计非常有用。
差分方程的Z变换解
其中: 其中:
。
14
实验步骤与方法
用ztrans、iztrans求实验内容1和2。在命令窗口求解 ztrans、iztrans求实验内容 求实验内容1 即可。 即可。 在例3 计算的是前向差分方程。但实验内容3 (a)是 在例3中,计算的是前向差分方程。但实验内容3 (a)是 后向差分方程。所以要仿照例3的程序和Z 后向差分方程。所以要仿照例3的程序和Z变换求解后 向差分方程的原理编写用z 向差分方程的原理编写用z变换计算前向差分方程的零 输入响应,零状态响应,全响应的程序。 输入响应,零状态响应,全响应的程序。 仿照例3的方法,完成实验内容3的编程。 仿照例3的方法,完成实验内容3的编程。上机调试程 序,与理论计算结果比较。 与理论计算结果比较。 由于实验内容4有复数极点, 由于实验内容4有复数极点,用符号运算的方法就不能 计算。这需要用部分分式法和Z 计算。这需要用部分分式法和Z变换解差分方程的原理 来完成实验内容4的编程。(提高实验) 来完成实验内容4的编程。(提高实验) 。(提高实验
4
实验原理与说明
3、差分方程的Z变换解 差分方程的Z 若线性常系数差分方程描述的系统为: 若线性常系数差分方程描述的系统为:
(1)已知零输入初始值 对上式两边取 变换有: 变换有:
和
上式的第一项为零输入响应,第二项为零状态响应。 上式的第一项为零输入响应,第二项为零状态响应。
5
实验原理与说明
(2)已知系统初始值 对原方程式两边取
10
实验内容 1
求下列序列的变
(a) (b)
换,并注明收敛域。 并注明收敛域。
(c) (d)
11
实验内容 2
求下列
信号与系统5-2差分方程的Z变换解课件
电信学院
1
前向差分方程
查公式
考虑二阶系统:
y(k 2) a1y(k 1) a0 y(k) b2 f (k 2) b1 f (k 1) b0 f (k)
初始值:yzi (0), yzi (1)
两边取Z变换有:
(z2 a1z a0 )Y (z) yzi (0)z2 yzi (1)z a1yzi (0)z (b2z2 b1z b0 )F(z)
1
(z
1)( z
2)
z
1
3
z
1
z
1
3
z
2
全响应
yzs (k )
[2 3
(1)k
1 3
(2)k
] (k)
y(k)
yzi
(k)
yzs (k )
[
2 3
6(1)k
2 3
(2)k
]
(k)
电信学院 返回
8
例 5.12 解 法 二
y(k 2) 3y(k 1) 2y(k) f (k 1) 3 f (k) yzi(1)=1, yzi(2)=3
F(z)
Y (z) Yzi (z) Yzs (z) 零输入响应
零状态响应
电信学院
3
系统函数
定义
H
(z)
零状态响应的z变换 激励信号的z变换
Yzs (z) F(z)
二阶系统零状态响应
Yzs (z)
b2z2 b1z b0 z2 a1z a0
F(z)
H (z)F (z)
对n阶LTI系统的系统函数
(b2z2 b1z b0 )F(z) b2 f (0)z2 b2 f (1)z b1 f (0)z
令:M (z) [ y(0) b2 f (0)]z2 [ y(1) a1y(0) b2 f (1) b1 f (0)]z
利用z变换解差分方程

于是
Y(z) =
br z−r ∑ ak z−k ∑
k= 0 M r= 0 N
M
X(z)
令
H(z) =
∑b z
r r= 0 N k= 0
−r
ak z−k ∑
则
Y(z) = X (z)H(z)
−1
此时对应的序列为 y(n) = F [X(z)H(z)]
差分方程为 例:若描述离散系统的 1 1 y(n) + y(n −1) − y(n − 2) = x(n) 2 2 x(n) = 2n u(n) , y( 已知激励 初始状态 −1) =1, y(−2) = 0, 求系统的零输入响应、 零状态响应和全响应。 求系统的零输入响应、 零状态响应和全响应。
ak z−k [Y(z) = ∑br z−r [X(z) + ∑x(m)z−m] ∑
k= 0 r= 0 m=−r N M −1
如果激励x(n)为因果序列, 如果激励x(n)为因果序列,上式可以写成 x(n)为因果序列
ak z−k [Y(z) = ∑br z−r X(z) ∑
k= 0 r= 0 N M
8.5节已经给出利用 节已经给出利用z 在8.5节已经给出利用z变换解差分方程的简 单实例,本节给出一般规律。 单实例,本节给出一般规律。这种方法的原 理是基于z变换的线性和位移性, 理是基于z变换的线性和位移性,把差分方程 转化为代数方程,从而使求解过程简化。 转化为代数方程,从而使求解过程简化。
k= 0 l =−k r= 0 m=−r −1
若激励x(n)=0,即系统处于零输入状态,此时 若激励x(n)=0,即系统处于零输入状态, x(n)=0,即系统处于零输入状态 差分方程( 差分方程(1)成为齐次方程∑a y(n −源自) =0k=0 kN
差分方程及其Z变换法求解
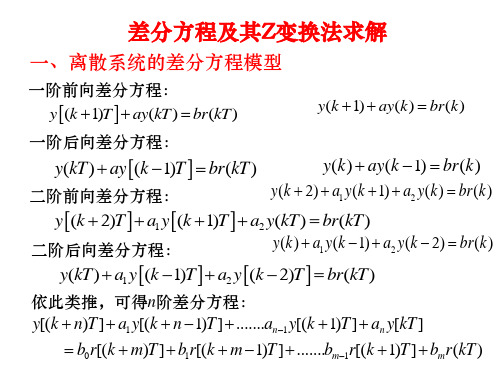
例1:右图所示的一阶系统描述它的微分方程为
y(t ) Ke(t ) K (r (t ) y(t ))
y(t ) Ky(t ) Kr (t )
用一阶前向差分方程近似:
(1)
r( t ) e( t ) -
K
1/s
y( t )
y (k 1)T y (kT ) dy y (t ) lim dt T 0 T
由图:x1 (k 1)T x2 (kT )
zX 1 ( z ) zx1 (0) X 2 ( z )
x2(kT)
z
1
x1(kT)
z 1
x1(0) 1
x1 ( z)
x2(z) y[(k+1)T]
例2:画出例2所示离散系统的模拟图
y[(k 1)T ] -( KT -1) y(kT ) + KTr (kT ) r(kT)
y (k 1)T y (kT ) T
(T 很小)
(2)
式中:T为采样周期,(2)代入(1)得:
y (k 1)T (KT 1) y(kT ) KTr(kT )
y(k 1) ( K 1) y(k ) Kr (k )
(3)
二、离散系统差分方程的模拟图
连续系统采用积分器s-1作为模拟连续系统微分方程的主要器件; 与此相对应,在离散系统中,采用单位延迟器z-1。 单位延迟器:把输入信号延迟一个采样周期T秒或延迟1拍。
再利用初始条件,逐次迭代得到各采样时刻的值。
特点:适用于计算机处理求解。 例3:用迭代法解二阶差分方程 y(k+2) +3y(k+1)+2y(k)=1(k)
利用初始条件 y(0)=0, y(1)=1,则有: y(k+2) =-3y(k+1) -2y(k)+1(k) y(2) =-3y(1) -2y(0)+1(0)= -3*1-2*0+1= -2
3差分方程Z变换解读
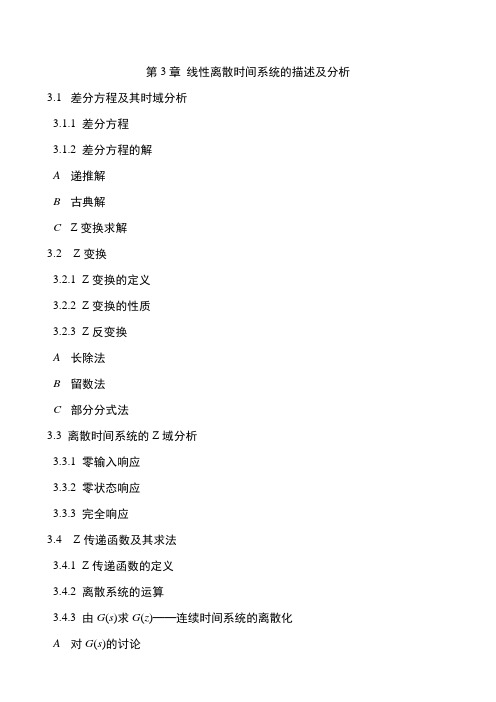
第3章线性离散时间系统的描述及分析3.1 差分方程及其时域分析3.1.1 差分方程3.1.2 差分方程的解A递推解B古典解C Z变换求解3.2 Z变换3.2.1 Z变换的定义3.2.2 Z变换的性质3.2.3 Z反变换A长除法B留数法C部分分式法3.3 离散时间系统的Z域分析3.3.1 零输入响应3.3.2 零状态响应3.3.3 完全响应3.4 Z传递函数及其求法3.4.1 Z传递函数的定义3.4.2 离散系统的运算3.4.3 由G(s)求G(z)——连续时间系统的离散化A对G(s)的讨论B对离散化方法的评价C 留数法D直接代换法E系统等效法Ⅰ——冲击响应不变法;F系统等效法Ⅱ——阶跃响应不变法G部分分式法3.4.4 离散化方法小结3.5 线性离散时间系统的稳定性分析3.5.1 闭环极点与输出特性之间的关系3.5.2 稳定判据3.6 线性离散时间系统的频率特性分析法3.6.1 线性离散时间系统的频率特性3.6.2 线性离散时间系统的频率特性分析法第3章 线性离散系统的描述及分析3.1 差分方程及其时域分析3.1.1 差分方程在线性离散时间动态系统中,输入激励序列u (k )与输出响应序列y (k )之间的动态关系在时域中用差分方程来描述,差分方程一般写成升序方式1101101-1()(1)(1)()()(1)(1)()0(0),(1),...,(-1)n n m m n y k n a y k n a y k a y k b u k m b u k m b u k b u k k y y y y y n y m n--+++-++++==+++-++++≥===≤有始性:初始条件:时间因果律: (2.1)或写成∑∑==-+--+=+m i nj j i j n k y a i m k u b n k y 01)()()(上式表明某一离散时间点上输出值可能与当前时间点上的输入值(当00,b m n ≠=)以及此前若干个输入和输出值有关。
6.5 用Z变换解差分方程
上述结论可由s平面与z平面的关系以及H(s)极点 分布与h(t)形状的关系直接得来
(五)由H(z)判定离散系统的稳定性
稳定系统: H z 的全部极点落在单位圆之内。
临界稳定系统:单位圆上有一阶极点,其余极点均位 于单位圆内。
不稳定系统:单位圆外有极点或单位圆上有高阶极点。
第六章 z变换、 离散系统的z域分析 小结
解:
零状态响应,初值为0
(1) Y z 3z 1Y z 2z 2Y z X z 1 z 1
Y z 1 z 1 z ( 2) H z 1 2 X z 1 3z 2z z2
综合
例:书:87页,例8-19
§6.5
用 z 变 换 解 差 分 方 程
§6利用Z变换解差分方程的一般规律; 方法的原理: 基于Z变换的线性和位移性 将差分方程转化为代数方程 使求解过程简化
线性时不变离散系统的差分方程一般形式:
a
k 0
N
k
y( n k ) br x ( n r )
N N A z n 1 k hn ZT Ak zk un k 0 z zk k 0
H z 的极点 zk ,可以是不同的实数或共轭复数, 决定了 hn 的特性。
zk在单位圆内,h(n)为衰减序列
zk在单位圆外, h(n)为发散序列 zk在单位圆上且为一阶: h(n)不衰减也不发散 zk在单位圆上且为高阶: h(n)为发散序列
2) A1 2 ,B1 2,
3) Y z 2
B2 2
z z z 2 2 2 z 1 z2 z 2
n n n
4) yn 2 1 2 2 2n 2 un
利用z变换解差分方程 ppt课件

利用z变换解差分方程
6
于是 令 则
M
br z r
Y(z)
r=0 N
X (z)
ak zk
k=0
M
br z r
H (z)
r=0 N
ak zk
k=0
Y(z)X(z)H (z)
此时对应的序列为 F y(n) 1[X(z)H (z)]
利用z变换解差分方程
7
例: 已知系统的差分方达程式表为
y(n)0.9y(n1) 0.05u(n) 若边界条y件(1) 1,求系统的完全响应。
5
若系统的起始状态y(l)=0(-N≤l≤-1),即系统处于 零起始状态,此时式(2)变成
N
M
1
a kz k[Y (z)b rz r[X (z) x (m )z m ]
k = 0
r= 0
m r
如果激励x(n)为因X(z)
k= 0
r= 0
利用z变换解差分方程
3
线性常系数差分一方般程形的式为
N
M
ak y(nk) brx(nr)
k0
r0
(1)
将 等 式 两 边 取 换单 ,边 利z用变z 变性换得位 移 特
N
1
M
1
akzk[Y(z) y(l)zl] brzr[X(z) x(m)zm] (2)
k=0
lk
r=0
mr
利用z变换解差分方程
§7.7 利用z变换解差分方程
• 主要内容
•z变换解差分方程的一般步骤 •举例说明
• 重点:利用z变换解差分方程的一般步骤
利用z变换解差分方程
1
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
用单边Z变换解差分方程
n
h( n)
15
可以稳定
x ( n)
h( n)
k
y(n) x(n) * h(n)
h(k ) x(n k )
x(n) M
y ( n)
k
h ( k ) x ( n k ) M h( k )
k
k x ( k ) z
1 m k k z x ( k ) z x ( k ) z k m k 0 1 m k z X ( z ) x(k ) z k m
4
(4)对于因果序列x(n)
k m k x ( k ) z 0 1
1 2 2
10 z Y ( z ) 0.1z [Y ( z ) zy (1)] 0.02 z [Y ( z ) z y (2) zy (1)] z 1 10 z (1 0.1z 1 0.02 z 2 )Y ( z ) 0.08 z 1 0.28 z 1
2 1
yss (n) B sin[n 2 ( )]
28
Y (e ) H (e ) j X (e )
j
j
H (e ) H (e ) e B H (e ) A
j
j
j
j ( )
B j[ 2 ( ) 1 ( )] e A
( ) 2 ( ) 1 ( )
§8.7 用单边Z变换解差分方程
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
1
(一)复习Z变换的位移特性
若x(n)分别是双边序列、双边左移序列、 双边右移序列时,它们的双边和单边Z变 换是不同的: (1)双边序列的双边Z变换(p79-p83)
差分方程Z变换
第3章线性离散时间系统的描述及分析差分方程及其时域分析3.1.1 差分方程3.1.2 差分方程的解A递推解B古典解C Z变换求解Z变换3.2.1 Z变换的定义3.2.2 Z变换的性质3.2.3 Z反变换A长除法B留数法C部分分式法离散时间系统的Z域分析3.3.1 零输入响应3.3.2 零状态响应3.3.3 完全响应Z传递函数及其求法3.4.1 Z传递函数的定义3.4.2 离散系统的运算3.4.3 由G(s)求G(z)——连续时间系统的离散化A对G(s)的讨论B对离散化方法的评价C 留数法D直接代换法E系统等效法Ⅰ——冲击响应不变法;F系统等效法Ⅱ——阶跃响应不变法G部分分式法3.4.4 离散化方法小结线性离散时间系统的稳定性分析3.5.1 闭环极点与输出特性之间的关系3.5.2 稳定判据线性离散时间系统的频率特性分析法3.6.1 线性离散时间系统的频率特性3.6.2 线性离散时间系统的频率特性分析法第3章 线性离散系统的描述及分析3.1 差分方程及其时域分析3.1.1 差分方程在线性离散时间动态系统中,输入激励序列u (k )与输出响应序列y (k )之间的动态关系在时域中用差分方程来描述,差分方程一般写成升序方式1101101-1()(1)(1)()()(1)(1)()0(0),(1),...,(-1)n n m m n y k n a y k n a y k a y k b u k m b u k m b u k b u k k y y y y y n y m n--+++-++++==+++-++++≥===≤K K 有始性:初始条件:时间因果律:或写成∑∑==-+--+=+m i nj j i j n k y a i m k u b n k y 01)()()(上式表明某一离散时间点上输出值可能与当前时间点上的输入值(当00,b m n ≠=)以及此前若干个输入和输出值有关。
推论开来,当前的输出值是“此前”全部激励和内部状态共同作用的“积累”效应。
z变换到差分方程
z变换到差分方程z变换(Z-transform)是一种在数字信号处理中广泛应用的数学工具,用于将离散时间域中的信号转换为连续时间域中的信号,从而更方便地对信号进行分析与处理。
通常情况下,我们可以将差分方程(difference equation)通过Z变换来求解,从而得到其对应的Z变换函数(Z-transform function)。
具体地说,对于给定的差分方程:y(n) + a1*y(n-1) + a2*y(n-2) + ... + ak*y(n-k) = b0*x(n) + b1*x(n-1) + b2*x(n-2) + ... + bm*x(n-m)其中,y(n)和x(n)分别表示输出和输入信号在时间点n的取值,a1、a2、…、ak和b0、b1、…、bm为常数系数,k和m为差分方程的阶数。
我们可以通过将差分方程中的所有项进行变换,得到其对应的Z变换函数:Y(z) + a1*Y(z)*z^{-1} + a2*Y(z)*z^{-2} + ... + ak*Y(z)*z^{-k} =b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... + bm*X(z)*z^{-m}其中,Y(z)和X(z)分别表示输出和输入信号的Z变换函数,z^{-n}表示Z域中的时间延迟,也可以将其视为离散时间域中的退化因子,它对应的函数形式为z^{-n} = e^{-jwn},其中w为频率。
通过对上述等式进行变换和整理,我们可以将Y(z)和X(z)表示为如下形式:Y(z) = [b0*X(z) + b1*X(z)*z^{-1} + b2*X(z)*z^{-2} + ... +bm*X(z)*z^{-m}] / [1 + a1*z^{-1} + a2*z^{-2} + ... + ak*z^{-k}]X(z) = [X(z) + X(z)*z^{-1} + X(z)*z^{-2} + ... + X(z)*z^{-m}] / [m0 + b1*z^{-1} + b2*z^{-2} + ... + bm*z^{-m}]其中,Y(z)表示差分方程的输出信号的Z变换函数,X(z)表示差分方程的输入信号的Z变换函数。
差分方程_z_变换___概述说明以及解释

差分方程z 变换概述说明以及解释1. 引言1.1 概述差分方程是描述离散时间系统行为的重要数学工具。
在现实生活中,许多系统的变化是按照离散时间步骤进行的,例如数字信号处理、数字滤波、通信系统等。
而差分方程则可以描述这些系统在每个时间步骤上的状态和演变。
与此同时,z变换是一种重要的数学工具,用于分析离散信号和离散系统。
它将差分方程从时域(自变量是时间)转换到z域(自变量是复平面上的复数z),并且能够提供更加简洁和便于分析的表达形式。
本文将概述差分方程z变换的基本概念以及其在离散系统分析和设计中的应用。
我们将解释差分方程z变换过程,并讨论其优势和局限性。
最后,我们将总结主要观点和结论,并对未来发展提出展望和建议。
1.2 文章结构本文共分为五个部分:引言、差分方程z变换概述、解释差分方程z变换过程、差分方程z变换的优势与局限性以及结论和总结。
1.3 目的本文的目的是介绍差分方程z变换的基本概念和原理,并探讨其在离散系统分析和设计中的应用。
通过阐述z变换与时域之间的关系,传递函数和频率响应描述以及求解差分方程的步骤与方法,读者将能够理解并运用这一重要数学工具。
同时,我们还将提供对差分方程z变换优势与局限性的考察,以及对未来发展的展望和建议。
2. 差分方程z 变换概述:2.1 差分方程基础知识:差分方程是离散时间系统建模和分析中的重要工具,它可以描述离散时间的动态过程。
差分方程以递推关系式的形式表示系统的行为,其中当前时刻输出值与过去一段时间内输入值和输出值之间存在着数学上的关系。
2.2 z 变换介绍:z 变换是一种用于将差分方程从时域转换到复平面上的方法。
在信号处理领域中,z 变换常被用于对离散系统进行频域分析和设计数字滤波器。
z 变换将离散时间信号表示成复变量z 的函数,使得我们可以通过对复平面上的频率响应进行分析来理解系统的特性。
2.3 z 变换的应用领域:z 变换在许多领域都有广泛的应用。
在控制系统工程领域,z 变换可用于建立数字控制器模型、设计数字滤波器以及实现各种控制算法。
用单边Z变换解差分方程
35
全通
p1
r r
p2
H (e j )
1
r z1
e j
1
r z2
e j
0
2
T
靠近单位圆周的 H(e j ) 极点附近有尖峰
2
36 T
例:(8-34)
y(n)
x(n)
z 1
z 1
z 1
cos
(
2 N
)
2
cos
(
2 N
)
1
(1)h(n) ? (2)H (z) ? (3) pk ? zr ? (4)H (e j ) ?
n 22
序列的傅立叶反变换
x(n) 1 X (z)zn1dz
2 j z 1
序列 的傅立叶 逆变换
1 X (e j )e jn e j d (e j )
2j z 1
x(n) 1 X (e j )e jn d
2
23
连续信号和离散序列的傅立叶变换的 比较
• 连续
• 离散
X ( j)) x(t)e jtdt
(一)复习Z变换的位移特性
若x(n)分别是双边序列、双边左移序列、 双边右移序列时,它们的双边和单边Z变 换是不同的:
(1)双边序列的双边Z变换(p79-p83)
ZT [x(n)] X (z) x(n)zn n
ZT [x(n m)] zm X (z)
ZT [x(n m)] zm X (z)
1
(2)双边左移序列的单边Z变换 X (z) x(n)u(n)zn n0 ZT[x(n m)u(n)] x(n m)zn n0
zm x(n m)z(nm) zm x(k)zk
n0
k m
matlab中z变换例题

matlab中z变换例题在MATLAB中,我们可以使用z变换来表示离散时间信号。
z变换是傅里叶变换在离散时间信号上的推广,它将离散时间信号表示为一个复平面上的函数。
通过z变换,我们可以对离散时间系统进行分析和设计。
下面介绍两个使用z变换进行分析的例题。
例题1:计算差分方程的z变换考虑一个差分方程:y[n] = 0.5y[n-1] + x[n] + x[n-1],其中x[n]是离散时间输入信号,y[n]是输出信号。
我们可以使用z变换将这个差分方程转换为z域的函数。
首先,将差分方程中的y[n]项和x[n]项分别取z变换。
对于y[n],将y[n-1]替换为z^-1Y(z),其中Y(z)是y[n]的z变换。
对于x[n],将x[n]替换为X(z),其中X(z)是x[n]的z变换。
使用这些变换,将差分方程转换为z域的方程:Y(z) = 0.5z^-1Y(z) + X(z) + z^-1X(z)然后,我们可以通过移项,将Y(z)表示为X(z)的函数:Y(z) = X(z) / (1 - 0.5z^-1)这个方程表示了差分方程在z域的表达式。
通过求解这个方程,我们可以得到Y(z)关于X(z)的解析表达式。
例题2:通过z变换分析LTI系统考虑一个线性时不变(LTI)系统,它的差分方程为y[n] - 0.5y[n-1] = x[n],其中x[n]是输入信号,y[n]是输出信号。
我们可以使用z变换对这个系统进行分析。
首先,将差分方程中的y[n]和x[n]分别进行z变换。
对于y[n],将y[n-1]替换为z^-1Y(z),其中Y(z)是y[n]的z变换。
对于x[n],将x[n]替换为X(z),其中X(z)是x[n]的z变换。
使用这些变换,将差分方程转换为z域的方程:Y(z) - 0.5z^-1Y(z) = X(z)然后,我们可以将Y(z)表示为X(z)的函数:Y(z) = X(z) / (1 - 0.5z^-1)这个方程表示了LTI系统在z域的传递函数。
对差分方程两边进行Z变换
二.典型序列的收敛域 1.有限长序列:
x( z )
0 n1 n n2 x(n) 其它 0
n
n
x(n) z
n n1
n x ( n ) z (1)
n2
①
n1 0 n2 0
0 n n n1
( 1 )式 x(n) z
1 a n2 1 1. an 1 a n 0 n2 1
n2
a 1 a 1
a n1 a n2 1 a 1 n 2. a 1 a n n1 n2 n1 1 a 1
n2
1 n 3. a a 1 1 a n 0
n
a z
n 0
结论:(1)通常收敛域以极点为边界,且收敛域内无极点 1 z z z (2)根据x(n)是左边、右边、还是双边序列,直接 a z z a z b 1 1 写出收敛域形式 z b
a 1 z
n
a z b z
冲激,抽样 n 0
对上式取拉氏变换
xs (t ) x s (t )e st dt
0
[ x(nT ) (t nT )]e st dt
0 n 0
x( z ) x(n) z n x(0) x(1) z 1 x(2) z 2 x(n) z n
z 1
z 0.5
0.5 z 1
求三种可能收敛域的逆变换 解:1. 三种可能收敛域 2. 收敛域|z|>1时 (1)先求围线内所包含的极点个数x(z)zn-1
x( z ) z
n 1
z2 z n1 n 1 z ( z 1)(z 0.5) ( z 1)(z 0.5)
K2.11-差分方程的z变换解
y(2)
1
z2 3z , F(z) z
(z 1)(z 1)(z 2)
z 1
1 z 1 z 11 z , | z | 2 6 (z 1) 2 (z 1) 3 (z 2)
y(k) 1 1k 1 (1)k 11(2)k , k 0
62
i0
k 0
j0
n
n
i 1
m
[ ani z i ]Y (z) ani [ y(k i)z k ] ( bm j z j )F (z)
i0
i0
k 0
j0
2
差分方程的z变换解
Y (z)
M (z) A( z )
B(z) A( z )
F(z)
Yzi (z)
Yzs (z)
系统函数 H (z) Yzs (z) B(z) F (z) A(z)
5
差分方程的z变换解
y(k) 3y(k 1) 2 y(k 2) f (k 2)
对差分方程两边取单边z变换,得
0
1
Y (z) 3[z1Y (z) y(k 1)zk ] 2[z2Y (z) y(k 2)zk ] z2F (z)
k 0
k 0
Y
(z)
(3
2z1) y(1) 2 1 3z 1 2z 2
yzs (1) yzs (2) 0, f (k) (k)
由右移性质,对方程两边取单边z变换,得
Yzs ( z)
3z 1 yzs ( z)
2
z
Y 2 zs
(
z
)
z2F (z)
Yzs
(z)
(1
z 2 3z1
2 z 2
)
F(z)
(z