差分方程的Z变换解共15页
利用z变换解差分方程(精选)共15页文档

6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
Thank you
利用z变换解为 了城墙 而战斗 一样。 ——赫 拉克利 特 17、人类对于不公正的行为加以指责 ,并非 因为他 们愿意 做出这 种行为 ,而是 惟恐自 己会成 为这种 行为的 牺牲者 。—— 柏拉图 18、制定法律法令,就是为了不让强 者做什 么事都 横行霸 道。— —奥维 德 19、法律是社会的习惯和思想的结晶 。—— 托·伍·威尔逊 20、人们嘴上挂着的法律,其真实含 义是财 富。— —爱献 生
Z变换及差分方程的求解
Z变换及差分⽅程的求解第⼆讲离散时间动态经济系统运动分析及稳定性分析2.1离散时间函数与Z变换⽬的要求:通过本节的学习使学⽣掌握离散时间函数及Z变换的概念,会使⽤Z变换的性质解决问题,掌握差分⽅程及离散时间系统的运动分析⽅法。
教学内容:我们经常会遇到利⽤离散时间函数表⽰的差分⽅程或差分⽅程组,这在经济管理中经常遇到。
现介绍离散时间函数,差分⽅程后⾯介绍。
⼀、离散时间函数例1 ⼈⼝离散时间函数设全国⼈⼝普查每年进⾏⼀次。
每年的7⽉1⽇凌晨零点的⼈⼝数代表该年的⼈⼝数。
我们以t=0 代表1990年7⽉1⽇凌晨的这个时刻,那么t=1,2,3,……分别表⽰1991年、1992年、1993年等各年度7⽉1⽇凌晨零点。
各年度普查的实际⼈⼝数如下表所⽰中国实际⼈⼝数据(亿⼈)x(0)=11.4333, x(1)=11.5823, x(2)=11.7171,x(3)=11.8517, x(4)=11.9850, x(5)=12.1121,x(6)=12.2389, x(7)=12.3626,……由于在离散时间离取值,故称之为离散时间函数例2 国民⽣产总值GNP(gross national product)离散时间函数。
则,GNP(t)表⽰第t年的GNP数值。
GNP(O)=33560.5, GNP(1)=46670.0, GNP(2)=57494.9,……例3 企业⽉产量离散时间函数。
表为电视机⼯⼚⽣产⽉报表(万台)则,Y(0)=1.5, Y(1)=2, Y(2)=1.8,……可以看出,经济管理实践中基本上采⽤离散时间函数来表达各种变量的变化,并该函数没有解析表达式,只有图象、列表表达式。
其⾃变量为离散时间。
⼆、Z 变换及其逆变换导⾔:Z 变换是怎么发明出来的?⽜顿、莱布尼兹等发明了微积分,之后发明了常系数微分⽅程及⽅程组。
在求解⽅程时总结经验,简化计算,如⽤符号s 表⽰微分运算s=d/dt,即s 〃f(t)=df(t)/dt 。
3差分方程Z变换解读
第3 章线性离散时间系统的描述及分析3.1差分方程及其时域分析3.1.1差分方程3.1.2差分方程的解A 递推解B 古典解C Z 变换求解3.2Z 变换3.2.1Z 变换的定义3.2.2Z 变换的性质3.2.3Z 反变换A 长除法B 留数法C 部分分式法3.3离散时间系统的Z 域分析3.3.1零输入响应3.3.2零状态响应3.3.3完全响应3.4Z 传递函数及其求法3.4.1Z 传递函数的定义3.4.2离散系统的运算343由G(s)求G(z)――连续时间系统的离散化A对G(s)的讨论B 对离散化方法的评价C 留数法D 直接代换法E系统等效法I ——冲击响应不变法;F系统等效法II——阶跃响应不变法G 部分分式法3.4.4离散化方法小结3.5线性离散时间系统的稳定性分析3.5.1闭环极点与输出特性之间的关系3.5.2稳定判据3.6线性离散时间系统的频率特性分析法3.6.1线性离散时间系统的频率特性3.6.2线性离散时间系统的频率特性分析法第3章线性离散系统的描述及分析3.1差分方程及其时域分析3.1.1差分方程在线性离散时间动态系统中,输入激励序列u(k)与输出响应序列y(k)之间的动态关系在时域中用差分方程来描述,差分方程一般写成升序方式y(k+ n) +a』(k + n-1)+||| + a_i y(k+ 1)+ a n y(k^ (2 1)二b°u(k m) Qu(k m-1) ||| b m_i u(k 1) b m u(k)有始性:k - 0初始条件:y(0) = y。
, y(1) = %,…,y(n-1) = y“-i 时间因果律:m岂n 或写成m ny(k n)二為b i u(k m - i) -' a j y(k n - j)i =0 j =1上式表明某一离散时间点上输出值可能与当前时间点上的输入值(当以及此前若干个输入和输出值有关推论开来,当前的输出值是此前”全部激励和内部状态共同作用的积累效应。
对差分方程两边进行Z变换
二.典型序列的收敛域 1.有限长序列:
x( z )
0 n1 n n2 x(n) 其它 0
n
n
x(n) z
n n1
n x ( n ) z (1)
n2
①
n1 0 n2 0
0 n n n1
( 1 )式 x(n) z
1 a n2 1 1. an 1 a n 0 n2 1
n2
a 1 a 1
a n1 a n2 1 a 1 n 2. a 1 a n n1 n2 n1 1 a 1
n2
1 n 3. a a 1 1 a n 0
n
a z
n 0
结论:(1)通常收敛域以极点为边界,且收敛域内无极点 1 z z z (2)根据x(n)是左边、右边、还是双边序列,直接 a z z a z b 1 1 写出收敛域形式 z b
a 1 z
n
a z b z
冲激,抽样 n 0
对上式取拉氏变换
xs (t ) x s (t )e st dt
0
[ x(nT ) (t nT )]e st dt
0 n 0
x( z ) x(n) z n x(0) x(1) z 1 x(2) z 2 x(n) z n
z 1
z 0.5
0.5 z 1
求三种可能收敛域的逆变换 解:1. 三种可能收敛域 2. 收敛域|z|>1时 (1)先求围线内所包含的极点个数x(z)zn-1
x( z ) z
n 1
z2 z n1 n 1 z ( z 1)(z 0.5) ( z 1)(z 0.5)
数字信号处理,第二章 Z变换讲解
二、右边序列
例3:求序列 x(n) u(n)的Z变换及收敛域。
Z[x(n)] u(n)zn zn
n
n0
1 1 1 z z2
1 1 z 1
z z 1
Z[u(n)]的极点为1,零点为0 收敛域为|z|>1
零极相消
例:
Z[u(n) u(n 1)]
Z[u(n)] Z[u(n 1)]
s1in2zz1
1 sin(0 cos0
z 2
)
§2.3 z变换性质1
一、线性:
Z[a1x1(n)+a2x2(n)]=a1Z[x1(n)]+a2Z[x2(n)]
二、时移:
Z[x(n)]=X(z) Z[x(n-m)]=z-m·X(z)
意义:z-1:单位延迟器
z变换性质2
三、时域卷积:
即: x(n)z n M n
一、有限长序列
例1:求序列 x(n) RN (n) 的Z变换及收敛域。
Z[RN (n)]
RN (n)zn
n
N 1
z n
n0
1 zN 1 z1
收敛域为: 0 z ,
例2:求序列 x(n) (n)的Z变换及收敛域。
解:
Z[ (n)] (n)zn z0 1
z z1 z z 1 1
z 1
z 1 z 1
零、极点均为z=1,称为零极点相消。收敛域为整个z平面。
另:
u(n) u(n 1) (n), Z[ (n)] 1
例4:求序列 x(n) anu(n)的Z变换及收敛域。
解: X (z) anu(n)z n a n z n (az 1 )n
例2-4-2:
X
(
z)
信号与系统5-2差分方程的Z变换解课件
电信学院
1
前向差分方程
查公式
考虑二阶系统:
y(k 2) a1y(k 1) a0 y(k) b2 f (k 2) b1 f (k 1) b0 f (k)
初始值:yzi (0), yzi (1)
两边取Z变换有:
(z2 a1z a0 )Y (z) yzi (0)z2 yzi (1)z a1yzi (0)z (b2z2 b1z b0 )F(z)
1
(z
1)( z
2)
z
1
3
z
1
z
1
3
z
2
全响应
yzs (k )
[2 3
(1)k
1 3
(2)k
] (k)
y(k)
yzi
(k)
yzs (k )
[
2 3
6(1)k
2 3
(2)k
]
(k)
电信学院 返回
8
例 5.12 解 法 二
y(k 2) 3y(k 1) 2y(k) f (k 1) 3 f (k) yzi(1)=1, yzi(2)=3
F(z)
Y (z) Yzi (z) Yzs (z) 零输入响应
零状态响应
电信学院
3
系统函数
定义
H
(z)
零状态响应的z变换 激励信号的z变换
Yzs (z) F(z)
二阶系统零状态响应
Yzs (z)
b2z2 b1z b0 z2 a1z a0
F(z)
H (z)F (z)
对n阶LTI系统的系统函数
(b2z2 b1z b0 )F(z) b2 f (0)z2 b2 f (1)z b1 f (0)z
令:M (z) [ y(0) b2 f (0)]z2 [ y(1) a1y(0) b2 f (1) b1 f (0)]z
第七章 差分方程与z变换

u (n)
( n k ), ( n ) u ( n ) u ( n 1), R
k 0
(n) u (n) u (n N )
• 4.斜变信号
x (n ) nu (n )
与连续信号f(t)=t相似、 其它如t^2,t^3
• 5.指数信号
x (n ) a u (n )
n0
1 n-1
)
1
(1 z
既:
)
nz
n0
-n +1
1 (1 z
1
)
2
两边乘以z
,得 :
nz
n0
-n
z ( z 1)
1 2 1
收 敛 域 为 z 1。 如 果 再 对 z 求 导 , 并 同 乘 以 z 可 得 :
n0
n z
2
-n
( z + 1 ) 3 -n z ( z +4z+1) z . n z 3 4 ( z 1) n 0 ( z 1)
i arg [ x ( n )]
第二节 差分方程
• 1. 差分方程概念 • 含有未知序列y(n)及其位移序列y(n-1), y(n-2),……, y(n-N)的关系式称为差分 方程。(向后差分) • 含有未知序列y(n)及其位移序列y(n+1), y(n+2),……, y(n+N)的关系式称为差分 方程。(向前差分)
fourier变换laplace变换连续信号离散系统17世纪经典数值分析技术20世纪40年代得到重大发展60年代随着计算机的发展离散时间系统的理论与实践研究得到了进一步发展
利用z变换解差分方程

于是
Y(z) =
br z−r ∑ ak z−k ∑
k= 0 M r= 0 N
M
X(z)
令
H(z) =
∑b z
r r= 0 N k= 0
−r
ak z−k ∑
则
Y(z) = X (z)H(z)
−1
此时对应的序列为 y(n) = F [X(z)H(z)]
差分方程为 例:若描述离散系统的 1 1 y(n) + y(n −1) − y(n − 2) = x(n) 2 2 x(n) = 2n u(n) , y( 已知激励 初始状态 −1) =1, y(−2) = 0, 求系统的零输入响应、 零状态响应和全响应。 求系统的零输入响应、 零状态响应和全响应。
ak z−k [Y(z) = ∑br z−r [X(z) + ∑x(m)z−m] ∑
k= 0 r= 0 m=−r N M −1
如果激励x(n)为因果序列, 如果激励x(n)为因果序列,上式可以写成 x(n)为因果序列
ak z−k [Y(z) = ∑br z−r X(z) ∑
k= 0 r= 0 N M
8.5节已经给出利用 节已经给出利用z 在8.5节已经给出利用z变换解差分方程的简 单实例,本节给出一般规律。 单实例,本节给出一般规律。这种方法的原 理是基于z变换的线性和位移性, 理是基于z变换的线性和位移性,把差分方程 转化为代数方程,从而使求解过程简化。 转化为代数方程,从而使求解过程简化。
k= 0 l =−k r= 0 m=−r −1
若激励x(n)=0,即系统处于零输入状态,此时 若激励x(n)=0,即系统处于零输入状态, x(n)=0,即系统处于零输入状态 差分方程( 差分方程(1)成为齐次方程∑a y(n −源自) =0k=0 kN
差分方程及其Z变换法求解
例1:右图所示的一阶系统描述它的微分方程为
y(t ) Ke(t ) K (r (t ) y(t ))
y(t ) Ky(t ) Kr (t )
用一阶前向差分方程近似:
(1)
r( t ) e( t ) -
K
1/s
y( t )
y (k 1)T y (kT ) dy y (t ) lim dt T 0 T
由图:x1 (k 1)T x2 (kT )
zX 1 ( z ) zx1 (0) X 2 ( z )
x2(kT)
z
1
x1(kT)
z 1
x1(0) 1
x1 ( z)
x2(z) y[(k+1)T]
例2:画出例2所示离散系统的模拟图
y[(k 1)T ] -( KT -1) y(kT ) + KTr (kT ) r(kT)
y (k 1)T y (kT ) T
(T 很小)
(2)
式中:T为采样周期,(2)代入(1)得:
y (k 1)T (KT 1) y(kT ) KTr(kT )
y(k 1) ( K 1) y(k ) Kr (k )
(3)
二、离散系统差分方程的模拟图
连续系统采用积分器s-1作为模拟连续系统微分方程的主要器件; 与此相对应,在离散系统中,采用单位延迟器z-1。 单位延迟器:把输入信号延迟一个采样周期T秒或延迟1拍。
再利用初始条件,逐次迭代得到各采样时刻的值。
特点:适用于计算机处理求解。 例3:用迭代法解二阶差分方程 y(k+2) +3y(k+1)+2y(k)=1(k)
利用初始条件 y(0)=0, y(1)=1,则有: y(k+2) =-3y(k+1) -2y(k)+1(k) y(2) =-3y(1) -2y(0)+1(0)= -3*1-2*0+1= -2
差分方程的z变换解法ppt课件
例如:有一因果系统方程为:y(n) 1 y(n 1) 1 x(n)
2
2
⑴ 若y(-1)=2,求系统的零输入响应;
⑵ 若x(n)=(1/4)nu(n),求系统的零状态响应;
解:⑴ 求零输入响应,系统方程为齐次方程。
y(n) 1 y(n 1) 0 2
系统方程求z变换
Y (z) 1 z1[Y (z) y(1)z] 0 2
y(n) 0.7 y(n 1) 0.1y(n 2) x(n) x(n 1) x(n) u(n) , y(1) 2, y(2) 7
解:对方程两边同求z变换
Y (z) 0.7z1[Y (z) y(1)z] 0.1z2[Y (z) y(2)z2 y(1)z] X (z)(1 z1)
§5-4 LTI系统Z变换分析法
利用Z变换求解线性常系数差分方程方法如下: ⒈对差分方程两边求单边z变换。注意:方程左边应用非因果的移
位性,方程右边应用因果序列的移位性。
⒉解代数方程,求输出序列的z变换Y(z)。
⒊求反z变换,得到输出的时间序列y(n)。
N
M
设差分方程为: ak y(n k)
X(z)
z z1
4
1 z2 Y(z) 2
(z 1)(z 1) 24
1z 1z
Y (z)
3 z
1
6 z
1
2
4
1
Y(z) 2 X (z) 1 1 z1 2
Y (z) z
(z
1z 2 1)(z
1)
24
11
z
3 1
对差分方程两边进行Z变换
② n1 0 n2 0
x( z ) x( z ) z n n都取负值,变成z的正幂,只要 z
n n1 n2
z 包括z=0 有限和收敛
③ n1 0 n2 0
x( z ) x( z ) z n z的负幂,只要 z 0 有限和收敛
冲激,抽样 n 0
对上式取拉氏变换
xs (t ) x s (t )e st dt
0
[ x(nT ) (t nT )]e st dt
0 n 0
x( z ) x(n) z n x(0) x(1) z 1 x(2) z 2 x(n) z n
0
x(n) z n
n 0
n2
其中 x(n) z n 只要z 有限项和肯定 (a)式要求z
n n1
x(n) z
n n 0 n 0
n2
n2
x(n) 只要z 有限项和肯定 (b)式要求z 0 zn
1 z z 1 n n ( z ) (1 z 1 ) 2 ( z 1) 2 n 0
n 0
a n u(n) z n
z za
a 1 即 z a z
§7.3
Z变换的收敛域
收敛域:只有当级数收敛时,Z变换才有意义对于任意
给定的有界序列x(n),使Z变换定义式 x(n) z n n
z 1 1
z 1
z 1
3.
Z [nu(n)] nu(n) z
n 0
nz n
n 0
n z n 0
1 1 z 1
Z变换和差分方程

• 引入变量: 引入变量:
z=e
Ts
sT s
或者写成: s = 1 ln z 或者写成:
S: 拉普拉斯变换的算子; Ts:采样周期; 拉普拉斯变换的算子; Ts:采样周期 采样周期; 一个复变量, 平面上, 变换算子, Z:一个复变量,定义在 Z 平面上,称为 Z 变换算子, 记为:采样信号的Z变换: 记为:采样信号的Z变换:Z[f*(t)] = F(z) 变换, F (z)是采样脉冲序列的 Z变换, 它只考虑了采样时刻的信号值。 它只考虑了采样时刻的信号值。
y ( 0 ) = 0 , y (1) = 2 , 激励 f ( k )= 2 k ε ( k ),
求: y (k )
• 解: • 将方程中除 y(k)以外的各项都移到等号右边, 以外的各项都移到等号右边, • 得: y (k ) = −3 y (k − 1) − 2 y (k − 2) + f (k ) • 对于 k = 2, 将已知初始值y (0) = 0, y (1) = 2代入上式,得:
s z 1 z R2 = lim ( s + jω ) = sT s → − jω ( s − jω )( s + jω ) z − e 2 z − e − jωT
例8—6 求
解:
f ( t ) = t 的Z变换
两阶重极点!! 两阶重极点!!
1 F (s) = 2 s
d z d z Tz 2 1 R = lim (s − 0) 2 = lim = sT sT 2 s →0 ds s →0 ds z − e s z −e ( z − 1)
c ( k ) = (1 − T ) k c ( 0 ) + T
∑
6.5 用Z变换解差分方程
上述结论可由s平面与z平面的关系以及H(s)极点 分布与h(t)形状的关系直接得来
(五)由H(z)判定离散系统的稳定性
稳定系统: H z 的全部极点落在单位圆之内。
临界稳定系统:单位圆上有一阶极点,其余极点均位 于单位圆内。
不稳定系统:单位圆外有极点或单位圆上有高阶极点。
第六章 z变换、 离散系统的z域分析 小结
解:
零状态响应,初值为0
(1) Y z 3z 1Y z 2z 2Y z X z 1 z 1
Y z 1 z 1 z ( 2) H z 1 2 X z 1 3z 2z z2
综合
例:书:87页,例8-19
§6.5
用 z 变 换 解 差 分 方 程
§6利用Z变换解差分方程的一般规律; 方法的原理: 基于Z变换的线性和位移性 将差分方程转化为代数方程 使求解过程简化
线性时不变离散系统的差分方程一般形式:
a
k 0
N
k
y( n k ) br x ( n r )
N N A z n 1 k hn ZT Ak zk un k 0 z zk k 0
H z 的极点 zk ,可以是不同的实数或共轭复数, 决定了 hn 的特性。
zk在单位圆内,h(n)为衰减序列
zk在单位圆外, h(n)为发散序列 zk在单位圆上且为一阶: h(n)不衰减也不发散 zk在单位圆上且为高阶: h(n)为发散序列
2) A1 2 ,B1 2,
3) Y z 2
B2 2
z z z 2 2 2 z 1 z2 z 2
n n n
4) yn 2 1 2 2 2n 2 un
利用z变换解差分方程 ppt课件

利用z变换解差分方程
6
于是 令 则
M
br z r
Y(z)
r=0 N
X (z)
ak zk
k=0
M
br z r
H (z)
r=0 N
ak zk
k=0
Y(z)X(z)H (z)
此时对应的序列为 F y(n) 1[X(z)H (z)]
利用z变换解差分方程
7
例: 已知系统的差分方达程式表为
y(n)0.9y(n1) 0.05u(n) 若边界条y件(1) 1,求系统的完全响应。
5
若系统的起始状态y(l)=0(-N≤l≤-1),即系统处于 零起始状态,此时式(2)变成
N
M
1
a kz k[Y (z)b rz r[X (z) x (m )z m ]
k = 0
r= 0
m r
如果激励x(n)为因X(z)
k= 0
r= 0
利用z变换解差分方程
3
线性常系数差分一方般程形的式为
N
M
ak y(nk) brx(nr)
k0
r0
(1)
将 等 式 两 边 取 换单 ,边 利z用变z 变性换得位 移 特
N
1
M
1
akzk[Y(z) y(l)zl] brzr[X(z) x(m)zm] (2)
k=0
lk
r=0
mr
利用z变换解差分方程
§7.7 利用z变换解差分方程
• 主要内容
•z变换解差分方程的一般步骤 •举例说明
• 重点:利用z变换解差分方程的一般步骤
利用z变换解差分方程
1
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
Z变换详细讲解
极点为: z 1 z 1 . 5 z 2i
圆z 2
例:
1 (2) x(n) u (n 1) 3
1 n n m
n
左边序列
m
1 1 z m 1 3 1 z m j Im[ z ] 1 (3z ) 1 1 1 1 3 z m 0 z Rx2 3 n Re[ z ] n lim (3z ) 1
1 z ZT[a u (n)] a z 1 1 az za n 0
n n n
( z a)
z 由此可以看出Z 变换的基本形式: z-zm
正弦序列的 Z 变换:
z ZT [e ] j 0 z e z j 0 n ZT [e ] j0 z e j 0 n j 0 n ZT [sin 0 n] ZT [(e e ) / 2 j]
n
an1 an
1, 级数收敛。 1, 级数发散。 1, 不能肯定。
如果序列x(n)在每个有限的间隔内是有限的 且当n 时是指数阶的,则它的Z变换存在 于 z R之范围,这里R是收敛半径。
指数阶函数和指数阶序列之间存在着对应关系,
定义:如有一序列x(n)当n 时存在正数A, a和N 使所有的n N时都有 x(n) Aa 称x(n)为指数阶函 1 8 ( z ) 1 z ( 1 1 3 3) X ( z) z 1 7 1 1 3 1 z z ( z n 0 3 3)
z ( ) e
8 1 8 3
j 2 k
收敛域为除了 0 和
的整个
x ( n) z
n 0
用单边Z变换解差分方程
n
h( n)
15
可以稳定
x ( n)
h( n)
k
y(n) x(n) * h(n)
h(k ) x(n k )
x(n) M
y ( n)
k
h ( k ) x ( n k ) M h( k )
k
k x ( k ) z
1 m k k z x ( k ) z x ( k ) z k m k 0 1 m k z X ( z ) x(k ) z k m
4
(4)对于因果序列x(n)
k m k x ( k ) z 0 1
1 2 2
10 z Y ( z ) 0.1z [Y ( z ) zy (1)] 0.02 z [Y ( z ) z y (2) zy (1)] z 1 10 z (1 0.1z 1 0.02 z 2 )Y ( z ) 0.08 z 1 0.28 z 1
2 1
yss (n) B sin[n 2 ( )]
28
Y (e ) H (e ) j X (e )
j
j
H (e ) H (e ) e B H (e ) A
j
j
j
j ( )
B j[ 2 ( ) 1 ( )] e A
( ) 2 ( ) 1 ( )
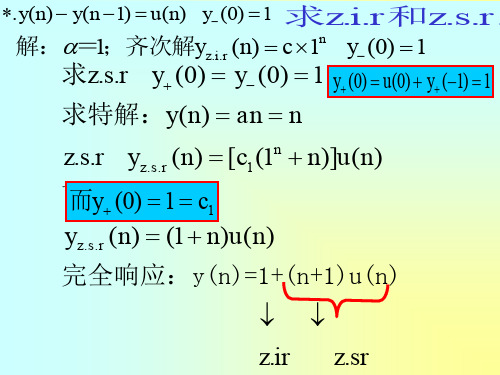
§8.7 用单边Z变换解差分方程
解差分方程的方法: (1)时域经典法 (2)卷积和解法 (3)Z变换解法
1
(一)复习Z变换的位移特性
若x(n)分别是双边序列、双边左移序列、 双边右移序列时,它们的双边和单边Z变 换是不同的: (1)双边序列的双边Z变换(p79-p83)
Z变换和差分方程

04
离散系统稳定性分析与判断
离散系统稳定性概念及意义
稳定性定义
离散系统的稳定性是指系统在受到外部 扰动后,能够恢复到原平衡状态的能力 。
VS
稳定性意义
稳定性是离散系统正常工作的前提,不稳 定的系统可能导致输出失控、性能恶化甚 至损坏。
基于差分方程稳定性分析方法
差分方程
描述离散系统动态行为的数学模型, 通过求解差分方程可得到系统输出。
若$x[n]$的Z变换为$X(z)$ ,则$x[n]e^{jomega n}$ 的Z变换为 $X(ze^{ jomega})$。证明 过程基于复指数函数的性质 和Z变换的定义。
若$x_1[n]$和$x_2[n]$的Z 变换分别为$X_1(z)$和 $X_2(z)$,则它们的卷积 $x_1[n]*x_2[n]$的Z变换为 $X_1(z)X_2(z)$。证明过程 利用卷积的定义和Z变换的 性质进行推导。
系统函数与稳定性分析
系统函数是描述系统频率响应特性的 重要工具,可通过Z变换求得。同时 ,利用系统函数可进行系统稳定性分 析,如判断系统是否稳定等。
Z变换和差分方程在其他领域应用前景探讨
数字信号处理
Z变换和差分方程在数字信号处理领域具有广泛应用,如滤波器设计 、信号压缩与重构等。
控制系统分析
在控制系统中,Z变换和差分方程可用于分析系统稳定性、设计控制 器等。
收敛域
Z变换的收敛域是指使得级数 $sum_{n=-infty}^{infty} |x[n]z^{n}|$收敛的所有$z$的集合。收敛域对 于Z变换的分析和性质至关重要。
常见函数Z变换表
单位样值信号
$delta[n]$的Z变换为$1$,收敛 域为整个复平面。
单位阶跃信号
用单边Z变换解差分方程
35
全通
p1
r r
p2
H (e j )
1
r z1
e j
1
r z2
e j
0
2
T
靠近单位圆周的 H(e j ) 极点附近有尖峰
2
36 T
例:(8-34)
y(n)
x(n)
z 1
z 1
z 1
cos
(
2 N
)
2
cos
(
2 N
)
1
(1)h(n) ? (2)H (z) ? (3) pk ? zr ? (4)H (e j ) ?
n 22
序列的傅立叶反变换
x(n) 1 X (z)zn1dz
2 j z 1
序列 的傅立叶 逆变换
1 X (e j )e jn e j d (e j )
2j z 1
x(n) 1 X (e j )e jn d
2
23
连续信号和离散序列的傅立叶变换的 比较
• 连续
• 离散
X ( j)) x(t)e jtdt
(一)复习Z变换的位移特性
若x(n)分别是双边序列、双边左移序列、 双边右移序列时,它们的双边和单边Z变 换是不同的:
(1)双边序列的双边Z变换(p79-p83)
ZT [x(n)] X (z) x(n)zn n
ZT [x(n m)] zm X (z)
ZT [x(n m)] zm X (z)
1
(2)双边左移序列的单边Z变换 X (z) x(n)u(n)zn n0 ZT[x(n m)u(n)] x(n m)zn n0
zm x(n m)z(nm) zm x(k)zk
n0
k m