UPNETARM2410-S相关的说明
图形界面程序Qt安装及其在2410-s上的移植
学习笔记----图形界面程序Qt安装及其在2410-s上的移植学习笔记----图形界面程序Qt安装及其在2410-s上的移植本文主要内容为编译器的安装,安装与建立Qt 桌面运行环境,Qt/E 的交叉编译,建立本机Qtopia 虚拟平台,Qtopia 2.1.1 在2410-S 上的移植.预备:编译器安装编译器: arm-linux-gcc-3.4.1.tar.bz2(软件从网上下载,如果不知道从什么地方下载,google就是了。
)把软件arm-linux-gcc-3.4.1.tar.bz2拷贝到/usr/local下,在终端执行如下命令安装:tar -xjf arm-linux-gcc-3.4.1.tar.bz2生成的编译工具在目录/usr/local/arm/3.4.1/bin下,修改/etc/profile,增加如下一行。
这可以让我们直接运行arm-linux-gcc,而不必将其绝对路径都写出来,不过这得重新启动后才生效:pathmunge /usr/local/arm/3.4.1/bin硬件:UP-NETARM2410S一. 安装与建立Qt 桌面运行环境软件:PC 机操作系统REDHAT LINUX 9.0 +MINICOM +ARM-LINUX 开发环境tmake-1.13.tar.gz qt-embedded-2.3.10-free.tar.gzqt-x11-2.3.2 .tar.gz软件从网上下载,如果不知道从什么地方下载,google就是了。
把本次实验用到的三个文件拷贝到/root/2410sQt目录下,以下的步骤是假设你在/root/2410sQt 下操作的。
Qt/Embedded 平台的搭建需要以下几步:第一步,解压安装包并设置环境变量tar –xzvf tmake-1.13.tar.gztar –xzvf qt-x11-2.3.2.tar.gztar –xzvfqt-embedded-2.3.10-free.tar.gzmv qt-2.3.10 qt-2.3.10-hostexportTMAKEDIR=$PWD/tmake-1.13export QT2DIR=$PWD/qt-2.3.2export QTEDIR=$PWD/qt-2.3.10-host环境变量的设置是非常重要的,它关系到能否正确的安装及编译这些安装包.注意: 在以下安装中,make命令执行前先执行一下make clean命令.第二步,编译Qt/Embedded。
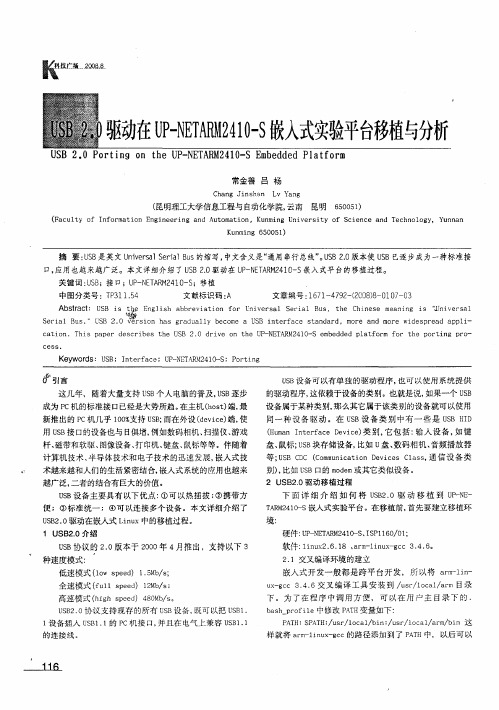
2410-S电路原理图01-Main

2
3
4
5
6
7
8
J101B VDD33 D ADDR0/GPA0 LA0 LA2 LA4 LA6 LA8 LA10 LA12 LA14 LDATA0 LDATA2 LDATA4 LDATA6 LnWBE0 I2SLRCK/GPE0 IISLRCK CDCLK/GPE2 CDCLK I2SSDO/I2SSDI/GPE4 IISSDO LDATA9 LDATA11 LDATA13 J101A 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 GND LA1 LA3 LA5 Local BUS LA7 LA9 LA11 LA13 LA15 EINT13/SPIMISO1/GPG5 LDATA1 EINT14/SPIMOSI1/GPG6 LDATA3 SPICLK0/GPE13 LDATA5 EINT15/SPICLK1/GPG7 LDATA7 LnWBE1 EINT10/nSS0/GPG2 EINT11/nSS1/GPG3 IISSCLK I2SSCLK/GPE1 nGCS2/GPA13 I2SSDI/nSS0/GPE3 IISSDI LDATA8 nGCS4/GPA15 LDATA10 VDD18 LnOE LDATA12 TOUT3/GPB3 TOUT3 LDATA14 TOUT1/GPB1 TOUT1 nXBACK/GPB5 nXBACK nXDACK1/GPB7 nXDACK1 nXDACK0/GPB9 nXDACK0 ADDR16/GPA1 LA16 ADDR18/GPA3 LA18 ADDR20/GPA5 LA20 ADDR22/GPA7 LA22 ADDR24/GPA9 LA24 ADDR26/GPA11 LA26 VLINE:HSYNC:CPV/GPC2 VL-HS VCLK:LCD_HCLK/GPC1 VCLK VD0/GPC8 VD0 VD1/GPC9 VD1 VD2/GPC10 VD2 VD3/GPC11 VD3 VD4/GPC12 VD4 VD5/GPC13 VD5 VD6/GPC14 VD6 VD7/GPC15 VD7 VD8/GPD0 VD8 VD9/GPD1 VD9 VD10/GPD2 VD10 VD11/GPD3 VD11 VD12/GPD4 VD12 VD13/GPD5 VD13 VD14/GPD6 VD14 VD15/GPD7 VD15 VD16/GPD8 VD16 VD17/GPD9 VD17 VD18/GPD10VD18 VD19/GPD11VD19 VD20/GPD12 VD20 VD21/GPD13 VD21 VD22/nSS1/GPD14 VD22 VD23/nSS0/GPD15 VD23 SDCLK/GPE5 SDCLK SDCMD/GPE6 SDCMD SDDAT0/GPE7 SDDATA0 SD BUS SDDAT1/GPE8 SDDATA1 SDDAT2/GPE9 SDDATA2 SDDAT3/GPE10 SDDATA3 CLKOUT1/GPH10 CLKOUT1 CLKOUT0/GPH9 CLKOUT0 TXD0/GPH2 TXD0 nCTS0/GPH0 GPH0 TXD2/nRTS1/GPH6 TXD2 UCLK/GPH8 SDWP EINT4/GPF4 EINT4 EINT6/GPF6 EINT6 ALE/GPA18 FALE FRB nFRE/GPA20 nFRE TXD1/GPH4 TXD1 AIN0 AIN2 AIN4 AIN6 VREF LDATA15 LDATA17 LDATA19 LDATA21 LDATA23 LDATA25 LDATA27 LDATA29 LDATA31 LnWBE3 MISO1 MOSI1 SPICLK0 SPICLK1 nSS0 nSS1 nGCS2 nGCS4 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 SPI 62 63 64 65 66 67 IIC 68 69 70 71 72 73 GCSx 74 75 76 77 78 79 80 81 TIMER 82 83 84 85 86 DMA 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 LCD 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 Uart0 171 172 173 174 175 Uart2 176 177 178 179 INT 180 181 182 183 184 185 186 187 188 189 Uart1 190 191 192 193 194 ADC 195 196 197 198 199 200 LCD BUS SO-DIMM-200 LDATA16 LDATA18 LDATA20 LDATA22 LDATA24 LDATA26 LDATA28 LDATA30 LnWBE2 MISO0 MOSI0 nRESET IICSDA IICSCL nGCS1 nGCS3 nGCS5 LnWE TOUT2 TOUT0 nXBREQ nXDREQ1 nXDREQ0 LA17 LA19 LA21 LA23 LA25 LnWAIT VF-VS VM-VDEN EINT0 EINT1 EINT2 EINT3 EINT8 EINT9 GPG8 GPG9 GPG10 PWREN TCLK0 TCLK1 nTRST TCK TMS TDI TDO GPC5 LEND GPC7 GPC6 GND SPIMISO0/GPE11 SPIMOSI0/GPE12 nRESET IICSDA/GPE15 IICSCL/GPE14 nGCS1/GPA12 nGCS3/GPA14 nGCS5/GPA16 GND TOUT2/GPB2 TOUT0/GPB0 nXBREQ/GPB6 nXDREQ1/GPB8 nXDREQ0/GPB10 ADDR17/GPA2 ADDR19/GPA4 Local BUS ADDR21/GPA6 ADDR23/GPA8 ADDR25/GPA10 VFRAME:VSYNC:STV/GPC3 VM:VDEN:TP/GPC4 EINT0/GPF0 EINT1/GPF1 EINT2/GPF2 INT EINT3/GPF3 EINT8/GPG0 EINT9/GPG1 EINT16/GPG8 GPG8/9/10 for EINT17/GPG9 UDA1341 EINT18/GPG10 EINT12/LCD_PWREN/GPG4 TCLK0/GPB4 TIMER TCLK EINT19/TCLK1/GPG11 JTAG LCDVF0/GPC5 LEND:STH/GPC0 LCDVF2/GPC7 LCDVF1/GPC6 C
2410经典版快速开始手册2.0
博创科技UP-TECH 2410经典平台快速开始手册(LINUX)V 2.0北京博创兴业科技有限公司2008.6博创科技UP-NETARM2410-CL经典LINUX系统快速开始手册v2.01.目的帮助初学者了解 UP-NETARM2410-CL 博创科技嵌入式教学科研平台的硬件资源,学习演示linux操作系统移植的demo程序,恢复出厂状态的方法等等,深入学习请参考三个操作系统的实验指导书及相关资料。
2.对象范围该手册适用于该教学科研平台的初次使用者,既适合于计算机,软件,电子,自动化,机电一体化等开设嵌入式专业课程的教师和学生,又适合于从事PMP、PDA、智能手机研发的硬件和软件工程师。
3.平台介绍UP-NETARM2410-CL是博创科技推出的国内最强配置的嵌入式开发平台,可以满足不同院校的ARM9嵌入式教学要求。
该平台在一定程度上可与博创PXA270核心板兼容。
3.1 UP-NETARM2410-CL核心模块资源* 基于ARM9架构的嵌入式芯片S3C2410,主频202MHz * 64MB SDRAM* 64MB FLASH3.2 UP-NETARM2410-S主板资源* 8寸640*480TFT真彩LCD* 触摸屏* 4个主USB口、1个从USB口* 1个UP-LINK集成调试接口(并口)、20针JTAG口* 一个100M 网卡,预留一个100M网卡* 两个串口、1个RS485串口、* 一个VGA接口* CAN总线接口* 红外通信收发器* 8通道10位AD转换模块* 10位DA转换模块* SD/MMC 接口* IDE硬盘接口* CF卡接口* IC卡接口* 直流电机、带有红外线测速电路* 2个用户自定义LED数码管、1个8x8点阵发光管、3个LED灯* 17键键盘、一个中断按键* PS2鼠标、键盘接口* 高性能立体声音频模块,支持放音、录音* 麦克风接入* 一个168Pin的扩展插座,硬件可无限扩展* 可提供配套的GPRS/GPS、FPGA、CAN单片机、USB2.0等扩展模块3.3 UP-NETARM2410-S 软件资源:*提供完整的Linux、WinCE、μC/OS-II操作系统移植*bootloader:vivi*操作系统:linux 2.4.x*驱动程序:提供所有板级设备的驱动程序3.4 UP-NETARM2410-CL 应用软件:*mplayer 媒体播放器,实现MPEG4、AVI、WMV 等多种媒体解码。
2410-S演示程序操作说明

UP-NETARM2410-S演示程序操作说明一、演示操作常用命令:ls 以默认方式显示当前目录文件列表cd dir切换到当前目录下的dir目录cd / 切换到根目录cd .. 切换到到上一级目录rm -rf dir 删除当前目录下叫dir的整个目录(包括下面的文件或子目录)cp 〈source〉 〈target〉 将文件source复制为target ifconfig eth0 192.168.0.115 设置网卡1的地址192.168.0.115 ping 192.168.0.83 测试与192.168.0.83的连接是否正常 insmod 加载驱动模块rmmod 卸载驱动ctrl+c 终止运行二、演示内容说明: 2410启动后由PC机的键盘控制。
进入[/mnt/yaffs]ls485 da ide lost+found sound wireless Qtopia exp init.sh motor touchscreenad fpga irda mplayer ucosbluetooth gps_gprs kbd_gpm pcmcia-mod videocan iccard lib sdcard web1.da实验:[/mnt/yaffs]cd da/――进入到da目录下[/mnt/yaffs/da]ls――显示da目录下内容da_main exio.o[/mnt/yaffs/da]insmod exio.o――安装da模块驱动Using exio.o[/mnt/yaffs/da]da_main 0 2.2――向0路输出2.2v电压 Current Voltage is 2.200000 v2. IC卡演示:插好IC卡[/mnt/yaffs]cd iccard/――进入到IC卡目录下[/mnt/yaffs/iccard]ls ――显示IC卡目录下内容i2c-tomega8.o iccard-ins.sh iccard-test[/mnt/yaffs/iccard]./iccard-test ――直接运行iccard-test即可,显示ic卡中的内容如下:Write 96 bytes data to /dev/mcu/iccard24c16Read 96 bytes data from /dev/mcu/iccard24c16! " # $ % & '( ) * + , - . 0 1 2 3 4 5 6 7 8 9 : ; < = > ? @ A B C D E F GH I J K L M N O P Q R S T U V W X Y Z [ \ ] ^ _ ` a b c d e fg h i j k l m n o p q r s t u v w x y z { | } ~3.播放视频:[/mnt/yaffs/iccard]cd /mnt/yaffs/mplayer/--带“/”表示绝对路径,但必须从/mnt开始[/mnt/yaffs/mplayer]lsmplayer mplayer2 test.avi[/mnt/yaffs/mplayer]mplayer test.avi――看到原始电影[/mnt/yaffs/mplayer]mplayer2 test.avi ――看到全频电影4.演示摄像头:启动后把摄像头插到2410-S的usb主口[/mnt/yaffs]cd video/[/mnt/yaffs/video]lsinsvideo.sh ov511.o v4lcap-arm videodev.o[/mnt/yaffs/video]./insvideo.sh――执行此脚本安装驱动 Using /mnt/yaffs/video/videodev.oLinux video capture interface: v1.00Using /mnt/yaffs/video/ov511.ousb.c: registered new driver ov511ov511.c: v1.65 : ov511 USB Camera Driver[/mnt/yaffs/video]./v4lcap-arm ―― 启动摄像头5.演示ad:[/mnt/yaffs]cd ad/[/mnt/yaffs/ad]lsad s3c2410-adc.o[/mnt/yaffs/ad]insmod s3c2410-adc.o[/mnt/yaffs/ad]./ad ――调节3路ad即可改变大小Press Enter key exit!a0= 3.2807 a1= 3.2968 a2= 0.8153注意:在ad实验前请用lsmod查看已加载的模块,如果存在ts-uptech,则需要用rmmod卸载。
2410-S快速开始手册
博创科技UP-NETARM2410-SLINUX系统快速开始手册v2.01.目的帮助初学者了解博创科技嵌入式教学科研平台UP-NETARM2410-S 的硬件资源,学习演示linux操作系统移植的demo程序,恢复出厂状态的方法等等,深入学习请参考三个操作系统的实验指导书及相关资料。
2.对象范围该手册适用于该教学科研平台的初次使用者,既适合于计算机,软件,电子,自动化,机电一体化等开设嵌入式专业课程的教师和学生,又适合于从事PMP、PDA、智能手机研发的硬件和软件工程师。
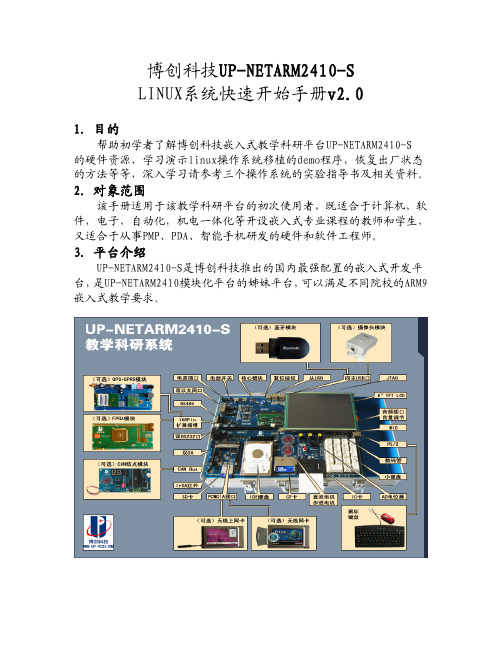
3.平台介绍UP-NETARM2410-S是博创科技推出的国内最强配置的嵌入式开发平台,是UP-NETARM2410模块化平台的姊妹平台,可以满足不同院校的ARM9嵌入式教学要求。
3.1 UP-NETARM2410-S核心模块资源* 基于ARM9架构的嵌入式芯片S3C2410,主频202MHz * 64MB SDRAM* 64MB FLASH3.2 UP-NETARM2410-S主板资源* 8寸640*480TFT真彩LCD* 触摸屏* 4个主USB口、1个从USB口* 2个JTAG接口* 一个100M 网卡,预留一个100M网卡* 两个串口、一个485接口* CAN总线接口* 红外通信收发器* 8通道10位AD转换模块* 2通道10位DA转换模块* PCMCIA接口* SD/MMC 接口* IDE硬盘接口* 笔记本硬盘接口* CF卡接口* IC卡接口* 直流电机、步进电机* 8个用户自定义LED数码管* 17键键盘* PS2鼠标、键盘接口* 高性能立体声音频模块,支持放音、录音* 麦克风接入* 一个168Pin的扩展插座,硬件可无限扩展3.3 UP-NETARM2410-S 软件资源:*提供完整的Linux、WinCE、μC/OS-II操作系统移植*bootloader:vivi*操作系统:linux 2.4.x*驱动程序:提供所有板级设备的驱动程序3.4 UP-NETARM2410-S 应用软件:*mplayer 媒体播放器,实现MPEG4、AVI、WMV 等多种媒体解码。
ARM2410-S

2 UP-NETARM2410-S平台硬件环境介绍
2.3 显示装置
LCD:8寸16bitTFT,640*480分辨率,型号是 LQ080V3DG01.S3C2410处理器内含LCD控制器, 这使得LCD部分的电路非常简单,LCD控制器 的信号线经过驱动电路后即可连接LCD模块;
触摸屏:采用2410 CPU AD单元的接口方案。
s3c2410内部总线-AMBA总线
AMBA(Advanced Microcontroller Bus Architecture)总线规范是ARM公司设计的一种用 于高性能嵌入式系统的总线标准 AMBA总线规范是一个开放标准,可免费从ARM获得 在基于ARM处理器内核的设计中,已经成为事实上 的工业标准 AMBA总线是一个多总线系统。规范定义了三种可以 组合使用的不同类型的总线:
s3c2410处理器核心-ARM920T
s3c2410处理器核心-ARM920T
ARM公司的16/32位RISC结构处理器 ARMV4指令集 数据、指令分离的哈佛体系结构 16KB指令缓存、16KB数据缓存 支持MMU,可运行WinCE、Linux等操作系统 外部总线采用AMBA总线 集成基于JTAG协议的片内调试(ICE)单元
CPU: ARM920T结构芯片,工作频率202MHz, SAMSUNG公司的S3c2410X
F:64MB SDRAM, HY57V561620CT-H
200管脚精密插座
s3c2410处理器
韩国三星公司推出的基于ARM920T内核和AMBA(Advanced Microcontroller Bus Architecture )总线的一款微处 理器; 使用0.18um CMOS工艺; 集成LCD、UART、IIC、SPI、IIS、USB、SD控制器等片内 外围接口; 支持ROM和NAND Flash引导; 适合面向功耗较低、成本敏感、应用环境较好的消费类电 子产品.
UP-NETARM2410-S入门

嵌入式linux的开发流程
建立应用程序的flash磁盘分区
一般使用JFFS2或YAFFS文件系统,这需要在内核中提供 JFFS2或YAFFS文件系统的驱动; 有的系统使用一个线性flash(NOR型)512K-32M,有的 系统使用非线性flash(NAND型)8-512M,有的两个同时 使用,需要根据应用来规划flash的分区方案。
Makefile文件举例:
all: $(EXEC) --all: $(EXEC): $(OBJS) $(CC) $(LDFLAGS) -o $@ $(OBJS) 编译主入口
clean: --clean: 清除编译结果 -rm -f $(EXEC) *.elf *.gdb *.o 注意:“$(CC) $(LDFLAGS) -o $@ $(OBJS)”和“-rm -f $(EXEC) *.elf *.gdb *.o”前空白由一个Tab制表符生成, 不能单纯由空格来代替。
硬件环境介绍
2410-S平台上通过一片ATMEGA8单片机作为 控制器,驱动PS2接口、IC卡接口和板载 KEYPAD。 ATMEGA8单片机通过IIC总线和 ARM处理器连接; LED:四个共阴极LED ,由通过IIC总线扩 展连接的ZLG7290控制; AD :3个电位器控制输入,8个通道经过跳 线设置可全部作为外部模拟电压输入,由 S3C2410芯片管脚引出 ;
硬件环境介绍
DC/STEP电机:直流电机信号来自PWM输出, 步进电机信号来自EXIO扩展, EXIO扩展电 路由74HC573构成,分配专用地址段,和 IDE接口在同一BANK; IDE/CF卡插座:类似于计算机主板上一个 IDE接口上的主从两个IDE设备一样,IDE接 口直接出自扩展总线,由软件完成驱动控 制; ;
内核移植到UPNETARM-2410-S平台
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊嵌入式Linux内核移植4.1 内核的配置及编译概述4.1.1 内核配置选项Linux内核源代码支持二十多种体系结构的处理器,还有各种各样的驱动程序等选项。
因此,在编译之前必须根据特定平台配置内核源代码。
Linux内核有上千个配置选项,配置相当复杂。
所以,Linux内核源代码组织了一个配置系统。
Linux内核配置系统可以生成内核配置菜单,方便内核配置。
配置系统主要包含Makefile、Kconfig和配置工具,可以生成配置界面。
配置界面是通过工具来生成的,工具通过Makefile编译执行,选项则通过各级目录的Kconfig文件定义。
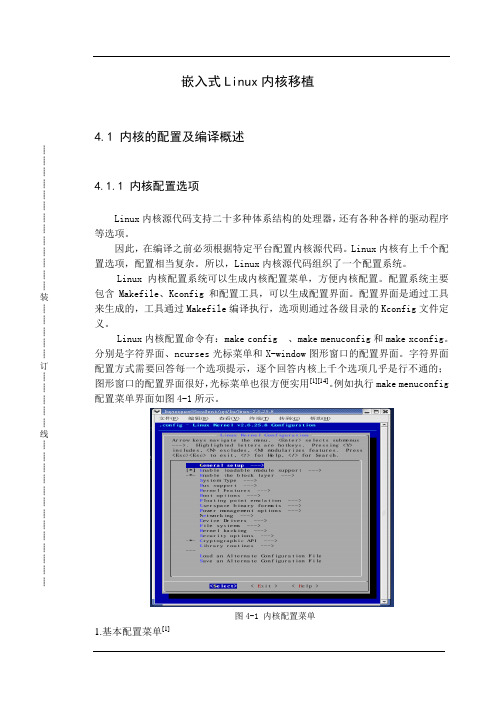
Linux内核配置命令有:make config 、make menuconfig和make xconfig。
分别是字符界面、ncurses光标菜单和X-window图形窗口的配置界面。
字符界面配置方式需要回答每一个选项提示,逐个回答内核上千个选项几乎是行不通的;图形窗口的配置界面很好,光标菜单也很方便实用[1][14]。
例如执行make menuconfig 配置菜单界面如图4-1所示。
图4-1 内核配置菜单1.基本配置菜单[1]┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊(1)Code maturity level options - 包含配置控制代码成熟度的一些选项CONFIG_EXPERIMENTAL选项可以包含一些处于开发状态或者不成熟的代码或者驱动程序。
(2)General setup - 包含通用的一些配置选项CONFIG_LOCALVERSION可以定义附加的内核版本号。
CONFIG_SW AP可以支持内存页交换的功能。
CONFIG_EMBEDDED支持嵌入式Linux标准内核配置。
CONFIG_KALLSYMS支持加载调试信息或符号解析功能。
嵌入式系统实验报告书

嵌入式系统实验报告书20 13– 20 14第1学期院系:电子通信工程系姓名:蒋瑾专业:通信工程学号:101307313指导老师:赵成实验一 认识嵌入式开发平台一、实验目的认识UP-NETARM2410-S 嵌入式开发平台,了解使用的ARM9 S3C2410嵌入式微处理器芯片,了解相应外围电路及接口的硬件电路设计,从而了解嵌入式系统的作用及其实现的功能。
二、实验内容观察嵌入式开发平台,认识板载的核心微处理器、存储芯片、电源电路部分、显示屏、键盘、网络接口、RS232接口、RS485接口、ADC 部分、DAC 部分、IrDA 部分、SD 卡接口、PCMCIA 卡接口、笔记本电脑硬盘接口部分、CF 卡接口、IC 卡接口、PS/2键盘鼠标接口、音频接口、USB 接口以及JTAG 调试接口等内容,了解相应电路及接口的电路原理。
三、预备知识了解常用的接口芯片及计算机外围设备;熟悉模拟及数字电路设计。
四、实验设备 1. 硬件环境配置计算机:Intel(R) Pentium(R) 及以上 内存:1GB 及以上实验设备:UP-NETARM2410-S 嵌入式开发平台 2. 软件环境配置操作系统:Microsoft Windows XP Professional Service Pack 2 虚拟机:VMware WorkStation 7Linux 系统:Red Hat Enterprise Linux AS 4 (2.6.9-5.EL)五、实验步骤六、遇到的问题及解决方法S3C2410核心资源LCD 驱动音频电路PS/2鼠标键盘接口小键盘IC 卡插口CF 卡插口IDE 硬盘接口PCMCIA 、SD 卡插口168Pin 扩展槽电源部分RS232/485接口USBJTAG 网络接口ADC/DAC IrDA 红外实验二安装VMWARE7.0虚拟机环境一、实验目的熟悉嵌入式系统开发环境的建立,学会Windows系统环境与Linux系统环境共享资源的基本方法。
2410用户操作说明

2410手持终端用户操作手册目录一.系统配置和安装 (3)二.下载扫描程序 (4)三.扫描程序的使用 (7)四. 上传扫描数据 (8)一.系统配置和安装1.系统配置1.1硬件该系统由 (Intermec 2410)、通讯基座、通讯电缆及电源组成。
1.2软件及运行环境在PC上安装接收程序,安装环境可为WIN98或WIN2000。
软件分两部分:1、2410上运行的数据采集软件 Chd2410.bin。
2、在PC上运行数据上传软件M90Comm.exe。
2.系统安装1.运行光盘根目录下M90&2410\CommWin2K(或CommWin98)下的setup.exe,逐步安装.2.将光盘根目录下M90&2410下FILECOPY目录复制到硬盘上(例如C盘目录下)3.联接2410通信机座与PC,操作如图所示:二.下载扫描程序Chd2410.bin到2410手持终端1、执行Filecopy目录下的t24fcopy.exe,将会出现如下画面,各对话框具体设置亦请参照如下画面:1.1 File Copy 对话框1.2 COM Port Setup 对话框1.3 Serial Setup对话框以上三画面均设置正确后,回到File Copy 对话框,同时进入手持终端的接受下载画面,操作如下:①系统热启动:长时间按住开机按钮✓”下的绿灯亮后松放,再按此键便可热启动。
画面如下:②选择“1”③回到File Copy 对话框,按“Download”下载程序注:上①,②步操作在手持终端上。
③在PC机上。
下载完成后,须进入手持终端的系统菜单(MAIN MENU)并运行此程序,操作如下:①开机:按②进入System Menu->File Manager->OK->CHD2410.BIN->ENTER即可进入用户使用菜单2.如果CHD2410.BIN已存在,需对其进行更新,请先删除此文件,操作如下::①进入System Menu->File Manager->OK->CHD2410.BIN->F7②按(1.1~1.3)进行下载操作。
S3C2410 NANDFLASH的配置实验

实验2 S3C2410 NANDFLASH的配置实验一、实验目的掌握UP-NETARM2410实验箱上电后如何从Nand Flash启动以及如何借助JLNK2向Nand Flash写入启动程序的方法,以及MDK存储器的配置方法。
二、实验预备知识熟悉UP-NETARM2410实验箱的结构,S3C2410的外设接口电路,熟悉MDK编程软件的使用方法,熟悉C语言程序设计的一般方法。
三、实验内容编写程序编译并下载到UP-NETARM2410实验箱S3C2410的Nand型Flash芯片K9F1208中,使得实验箱上的数码管能够稳定的显示29两个数字,并且掉电后重起依然可以稳定的显示29两个数字。
四、实验步骤(1)在工程文件主界面上,点击菜单“Project | Options for Target' Target 1'”,选择“Target”页签,设置该页如图1所示图1(2)点击图1上的Debug页签,去掉配置初始化文件。
然后点击图1上的Utilities 页签,设置如图2所示。
图2(3)点击图2上的“Settings”,弹出如图3所示的“Flash Download Setup”对话框,配置内容如图3所示图3(4)图3中,点击“Add”按钮,在弹出的对话框中选择K9F1208,如图4所示图4五、实验结果在Flash编程完成后,UP-NETARM2410实验箱上的两个七段数码管将显示“29”字样。
此时,可以关闭UP-NETARM2410实验箱电源,取下ULINK2仿真器,然后打开实验箱电源,七段数码管将会显示“29”,说明程序是从K9F1208启动的六、参考程序1 #define Seg7_1_addr (*(volatile unsigned char*)0x08000110)2 #define Seg7_2_addr (*(volatile unsigned char*)0x08000112)34 #define uchar unsigned char6 uchar seg7table[16] =7 {8 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E9 // 0 1 2 3 4 5 6 7 8 9 A B C D E F10 };1112 int main()13 {14 Seg7_1_addr = seg7table[2];15 Seg7_2_addr = seg7table[9];16 while(1)17 {1819 }20 }七、实验心得体会。
《ARM2410开发板》课件

ARM2410开发板的未来发展
展望ARM2410开发板的未来发展趋势和应用场景,为学习者提供持续学习的 动力。
总结与展望
总结本课程学习的关键知识点,并展望进一步深入学习ARM架构和开发板应用的可能性。
《ARM2410开发板》PPT 课件
ARM2410开发板是一款功能强大的嵌入式开发工具,本课程将介绍其硬件结 构、处理器概述、软件移植等关键方面,帮助您深入理解和应用ARM架构。
ARM架构简介
探索ARM架构的核心概念,了解其优势、体系结构以及不同版本之间的差异。
ARM2410处理器ห้องสมุดไป่ตู้述
深入研究ARM2410处理器的功能和特点,包括性能指标、指令集和数据处理能力。
探索ARM2410处理器的时钟结构,了解时钟频率对系统性能和功耗的影响。
ARM2410系统的启动过程
深入了解ARM2410系统的启动过程,包括复位向量、引导加载、初始化等关 键步骤。
Linux操作系统移植
了解在ARM2410开发板上进行Linux操作系统移植的方法和步骤,为实现更多 功能和应用打下基础。
网络协议栈介绍
探索网络协议栈在ARM2410系统中的实现和应用,了解网络通信的关键技术和协议。
TCP/IP协议栈移植
深入了解TCP/IP协议栈在ARM2410系统中的移植方法和步骤,实现网络通信功 能。
文件系统介绍
了解不同类型的文件系统在ARM2410系统中的应用,包括FAT、EXT等,为文件存储和管理提供解决方案。
数据存储与数据传输
掌握ARM2410开发板上的数据存储和传输方法,包括文件读写、网络传输等,为数据处理提供支持。
I/O设备驱动程序
学习如何编写和调试ARM2410开发板的I/O设备驱动程序,扩展系统功能和支 持外围设备。
USB2.0驱动在UP—NETARM2410-S嵌入式实验平台移植与分析
K y r s: U B; I t r a e U - E A ̄ 2 1 . e wo d S n e f c : P N T J 4 0 S:P r i g M - ot n
引 言
UB设备可以有 单独的驱动程序 , S 也可 以使用系统 提供
这几年, 随着 大量 支持 UB S 个人 电脑的普 及,S 逐步 UB
等 :S D (om n c to e ie l s , 信 设备 类 U B C C Cm u ia i n D v c s C a s 通 别) 比如 UB口的 m dm或其它类似设备 , S oe
2 U B . 动 移 植过 程 S 20驱
新推 出的 P c机几乎 1 0 支持 UB 而在外设 (e ie 端 , 0% S; dv c ) 使 用 UB接 口的设备也与 日俱增, S 例如数码相机 、 扫描 仪、 游戏 杆、 磁带和软驱、 图像设 备、 印机、 打 键盘 、 鼠标 等等 。伴随着
c ti a on. T S ap de ri es hi p er sc b th U 2. dr ve n e SB 0 i o th U -N A 241 -S mb d p at r fo t por in pr - e P ET RM O e ed ed l fo m r he t g o
下 面 详 细 介 绍 如 何 将 UB . S 2 0驱 动 移 植 到 u _ E P N—
T R 2 1- 嵌入式实验平 台。在移植前 , A M 4 S O 首先要建立移植环
UB . 驱动在嵌入式 Lnx S20 iu 中的移植过程。
1 US 2பைடு நூலகம்介 绍 B.
境:
硬 件 :P N T R 2 1- 、S 16 / 1 U- E A M 4 0 S IP 10 0 ;
基于ARM2410平台步进电机的控制
一、步进电机概述步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
二、步进电机的工作原理下面先以三相反应式步进电机为例,简单了解一下步进电机的工作原理。
1.结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图1)图12.旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。
甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
第06讲-2410-S硬件说明

博创科技 嵌入互动
2410-S电路介绍
2410-S平台为了兼容性,支持装配两款不同 型号的LCD模块: 5英寸大小,分辨率320×240,8bit,STN 8英寸大小,分辨率640×480,16bit,TFT 平台主板在硬件设计上保持全部接插件和装 配件的良好兼容。 实际产品可能采用8英寸的TFT真彩屏。
博创科技 嵌入互动
2410-S电路介绍
其他设备包括: AD输入,板载3个电位器。8个通道经过跳线 设置可全部作为外部模拟电压输入。 CAN总线电路由控制器MCP2510和驱动器 TJA1050构成,通过SPI总线与处理器接口。 DA电路由两片MAX504组成,提供两路10bit 数模转换输出,也是SPI总线接口。
博创科技 嵌入互动
2410-S电路介绍
触摸屏电路采用ADS7843完成AD转换,通过 SPI总线和处理器接口。 同样为了兼容性,平台上设计了多个触摸屏 接插位置,并保留了依靠2410 CPU AD单元 的另一套触摸屏接口方案。 因此,触摸屏电路部分有多个跳线需要设置 实际产品可能只采用一种接口和AD转换方案。
博创科技 嵌入互动
2410-S电路介绍
2410-S平台上通过一片ATMEGA8单片机作 为控制器,驱动PS2接口、IC卡接口和板载 KEYPAD。单片机通过IIC总线和ARM处理器 连接。 通过IIC总线扩展的资源还有LED数码管显示 芯片ZLG7290。 然后就是电源电路和复位电路,JTAG调试接 口等。由74HC21构成一个复位逻辑。
RESET
SDRAM CPU S3C2410 FLASH ROM 核心板
最小系统的构成
博创科技
嵌入互动
2410 CPU最小系统
S3C2410 32BIT RISC 微处理器 #应用于手持设备或者嵌入式系统 #32位RISC架构ARM920T CPU核 #MMU支持WinCE和Linux操作系统 #可以从NAND Flash引导 #具有丰富的内部外设
2410-S硬件说明书

简要目录
一、2410-S开发平台硬件资源第2页
二、2410-S开发平台的外部连接方式概况第3页
三、S3C2410 ARM MPU体系结构框图第5页
四、UP-NETARM 2410-S开发平台硬件架构第6页
五、部分电路原理说明第7页
六、资源占用情况第15页
10.双网卡NIC-2和NIC-1都在BANK2上,但NIC-2的基地址是0x400,逻辑地址是0x10000400;而NIC-1的则是基地址0x200,逻辑地址0x10000200。另外,NIC-2的中断是INT3,而NIC-1的则是INT2。
11.USB HUB,将2410的USB HOST扩展为4口,芯片为AT43301。电源管理的总电流限制为500mA,采用总线供电模式,芯片为MIC2525-2。过流后MIC2525会改变电平告知AT43301,然后AT43301发出信号使MIC2525关断,同时会向处理器发送信息,可参考AT43301 USB HUB文档。
两相四线步进电机

两相四线励磁式步进电机工作道理本章将介绍在嵌入式平台UP-NETARM2410-S中步进电机的实现.步进电机在各个范畴诸如机械人.智能掌握.工业掌握等方面都有着普遍的运用空间,本章侧重介绍步进电机的工作道理及编程实现步进电机驱动的办法,主要内容如下:l 步进电机的概述l 步进电机的工作道理l 和微处理器的总线衔接方法l 驱动程序的编程l Linux 下用软件的办法实现步进电机的脉冲分派,用软件的办法代替硬件的脉冲分派器1.步进电机概述步进电机是一种可以或许将电脉冲旌旗灯号转换成角位移或线位移的机电元件,它现实上是一种单相或多雷同步电念头.单相步进电念头有单路电脉冲驱动,输出功率一般很小,其用处为渺小功率驱动.多相步进电念头有多相方波脉冲驱动,用处很广.运用多相步进电念头时,单路电脉冲旌旗灯号可先经由过程脉冲分派器转换为多相脉冲旌旗灯号,在经功率放大后分离送入步进电念头各相绕组.每输入一个脉冲到脉冲分派器,电念头各相的通电状况就产生变更,转子会转过必定的角度(称为步距角).正常情形下,步进电机转过的总角度和输入的脉冲数成正比;持续输入一定频率的脉冲时,电念头的转速与输入脉冲的频率保持严厉的对应关系,不受电压摇动和负载变更的影响.因为步进电念头能直接吸收数字量的输入,所以特殊合适于微机掌握.步进电机迁移转变运用的是脉冲旌旗灯号,而脉冲是数字旌旗灯号,这恰是盘算机所擅长处理的数据类型.从20世纪80年月开端开辟出了专用的IC驱动电路,今天,在打印机.磁盘器等的OA装配的地位掌握中,步进电机都是不成缺乏的构成部分之一.总体上说,步进电机有如下长处:1.不须要反馈,掌握简略.2.与微机的衔接.速度掌握(启动.停滞和反转)及驱动电路的设计比较简略.3.没有角累积误差.4.停滞时也可保持转距.5.没有转向器等机械部分,不须要保养,故造价较低.6.即使没有传感器,也能准肯定位.7.根椐给定的脉冲周期,可以或许以随意率性速度转__________动.但是,这种电机也有自身的缺陷.8.难以获得较大的转矩9.不宜用作高速迁移转变10.在体积重量方面没有优势,能源运用率低.11.超出负载时会损坏同步,速工作时会发出振动和噪声.1.2 步进电机的种类今朝经常运用的步进电机有三类:1.反响式步进电念头(VR).采取高导磁材料构成齿状转子和定子,其构造简略,临盆成本低,步距角可以做的相当小,但动态机能相对较差.2.永磁式步进电念头(PM).转子采取多磁极的圆筒形的永磁铁,在其外侧设置装备摆设齿状定子.用转子和定子之间的吸引和排挤力产生迁移转变,迁移转变步的角度一般是7.50.它的出力大,动态性能好;但步距角一般比较大.3.混杂步进电念头(HB).这是PM 和VR的复合产品,其转子采取齿状的稀土永磁材料,定子则为齿状的崛起构造.此类电机分解了反响式和永磁式两者的长处,步距角小,出力大,动态机能好,是机能较好的一类步进电念头,在盘算机相干的装备中多用此类电机.2.步进电机的工作道理现以反响式三相步进电机为例解释其工作道理.三相步进电机的定子铁心上有六个外形雷同的大齿,相邻两个大齿之间的夹角为60 度.每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组.各个大齿的内概况上又有若干个平均散布的小齿.转子是一个圆柱形铁心,外概况上圆周偏向平均的布满了小齿.转子小齿的齿距是和定子雷同的.设计时应使转子齿数能被二整除.但某一相绕组通电,而转子可自由扭转时,该相两个大齿下的各个小齿将吸引邻近的转子小齿,使电念头迁移转变到转子小齿与该相定子小齿对齐的地位,而其它两相的各个大齿下的小齿肯定和转子的小齿分离错开正负1/3 的齿距,形成“齿错位”,从而形成电磁引力使电念头持续的____苔K_迁移转变下去.和反响式步进电念头不合,永磁式步进电念头的绕组电流请求正,反向流动,故驱动电路一般要做成双极性驱动.混杂式步进电念头的绕组电流也请求正,反向流淌,故驱动电路平日也要做成双极性.2.1.步进电机的励磁方法步进电机有2相.4相和5相电机.在4相电机中有4组线圈,若电流按次序经由过程线圈则使电机产生迁移转变.2相电机中有2 组线圈.从图9.3可以发明,在各线圈中引出中央端子,是以若以中央端子为基准即可实现4相,称这4为A.B.C.D 的励磁相.本试验运用的就是这种方法的4相电机,而励磁方法中有1 相(单向)励磁.2 相(双向)励磁和1-2 相(单-双向)励磁方法.此外,假如迁移转变的偏向不准确,可以瓜代1.2端子或3.4号端子(1). 1相励磁方法按ABCD的次序老是仅有一个励磁相有电流畅过,是以,对应1个脉冲信号电机只会迁移转变一步,这使电机只能产生很小的转矩并会产生振动,故很少使用.A B C DT1 1 0 0 0T2 0 1 0 0T3 0 0 1 0T4 0 0 0 1图2.T1-T4暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有(2). 2相励磁方法按AB.BC.CD.DA的方法老是只有2相励磁,经由过程的电流是1相励磁时经由过程电流的2倍,转矩也是1相励磁的2 倍.此时电机的振动较小且应答频率升高,今朝仍普遍运用此种方法.A B C DT1 1 1 0 0T2 0 1 1 0T3 0 0 1 1T4 1 0 0 1图3.T1-T4暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有脉冲(3). 1-2相励磁方法即试验中所有的励磁方法,它按A.AB.B.BC.C.CD.D.DA的次序瓜代进行线圈的励磁.与前述的2个线圈励磁方法比拟,电机的转速是原来的1/2,应答频率规模变成本来的2倍.转子以滑动的方法迁移转变.A B C DT1 1 0 0 0T2 1 1 0 0T3 0 1 0 0T4 0 1 1 0T5 0 0 1 0T6 0 0 1 1T7 0 0 0 1T8 1 0 0 1图4.T1-T8暗示脉冲周期;ABCD暗示电机的各相,1暗示此时有一个脉冲,0暗示没有脉冲3.与微处理器的衔接方法步进电机其实不是直接与CPU相连的.因为开辟板上外部装备许多,各功效模块与微处理器的衔接方法有专用线路,局部总线与扩大总线.3.1 局部总线与扩大总线局部总线与微处理器直接相连,扩大总线经由过程一个总线掌握器74LVCH6245与局部总线相连.从CPU 出来的数据.地址.读写掌握等旌旗灯号构成局部总线.NAND FLASH.SDRAM和网卡芯片AX88796 直接挂在局部总线上的.局部总线经过四片74LVCH16245 驱动后作为扩大总线引到其他外设以及168Pin 扩大槽.因为数据线是双向的,所以16245芯片必须有偏向掌握旌旗灯号,这里采取经过隔离后的写掌握旌旗灯号OE 作为数据线地点16245 芯片的偏向掌握线.当OE有用时16245 芯片把扩大总线上的数据传输到局部总线上;当OE无效时反之.别的,必须留意,当体系对局部总线上的芯片读数据时OE 一样会起作用,如许就必须对局部总线和扩大总线进行总线仲裁,这里是外设所具有的四个片选旌旗灯号nGCS1.3.4.5 用74HC21 相与后作为数据线地点的16245芯片的输出使能掌握线,只有当体系对扩大总线读操纵,也就是上述四个片选之一有用时,16245 才干对局部总线输出数据,不然无论OE 若何都呈现高阻态.如下图:注:LDATA暗示局部总线的数据线;DATA暗示扩大总线的数据线.74LVCH16425芯片共有四块,限于篇幅仅举一片为例,其它三片芯片,一片用于数据线的低位衔接,两片用于地址线的衔接.注:因为片选线运用的负逻辑电平有用,所有此处用的是与门扩大总线衔接在芯片74HC573上,扩大总线的DATA0-DATA7分离接在74HC573的八个数据输入端上.74HC573芯片是由8个三态门构成的寄存器,它起到临时保管信息和隔离总线的感化.芯片的输出I\O0—I\O3用于D\A数模转换,I\O4—I\O7用于步进电机的掌握.描写:这个芯片采取的是八进位的D触发器,它可以驱动电容式或电阻式的负载.是以它特殊合适运用于缓冲存放器.IO端口.双向的总线掌握器.和操纵存放器.当存放器的使能端(LE)为高电日常平凡,Q输出端和________D输入端一一对应;当LE为低电日常平凡,输出端管脚Q输出的是存放器中已被设定的值.当一个能开启缓冲功效的负逻辑管脚(OE)为0时,无论是在正常逻辑状况照样在高阻抗状态下,都能放置八位的输出数据.在高阻抗状况下.输出并没有负载或者进行掌握总线.高阻态和改良的总线驱动可以在不拉起元件的情形下掌握总线传输.OE端其实不影响存放器内部的操纵.当输出端呈高阻状况时旧的数据可以被保管或者新的数据进行输入.74HC573芯片的输出I\O4—I\O7用于用来驱动步进电机的迁移转变.数据线要起首接在步进电机模块的一个接口上.接口对旌旗灯号进行放大,使之可以或许驱动步进电机.放大后的旌旗灯号就可以直接的来使步进电路进行工作了.3.4.开辟板中的步进电机本开辟板中运用的步进电机为四相步进电机.转子小齿数为64.体系中采取四路I/O 进行并行掌握,ARM 掌握器直接发出多相脉冲旌旗灯号,在经由过程功率放大后,进入步进电机的各相绕组.如许就不再须要脉冲分派器.脉冲分派器的功效可以由纯软件的办法实现如上图所示.四相步距电机的掌握办法有四相单四拍,四相单.双八拍和四相双四拍三种掌握方法.步距角的盘算公式为:θb=3600/mCk个中:m 为相数,掌握办法是四相单四拍和四相双四拍时C 为1,掌握办法是四相单.双八拍时C 为2,Zk为转子小齿数.本体系中采取的是四相单.双八拍掌握办法,所以步距角为360°/512.但步进电机经由一个1/8 的减速器引出,现实的步距角应为360°/512/8.开辟平台中运用EXI/O 的高四位掌握四相步进电机的四个相.按照四相单.双八拍掌握办法,电机正转时的掌握次序为A→AB→B→BC→C→CD→D→DA.EXI/O 的高四位的值拜见下表:十六进制二进制通电状况1H 0001 A3H 0011 AB2H 0010 B6H 0110 BC4H 0100 CCH 1100 CD8H 1000 D9H 1001 DA表5. 电机正转时,EXIO的高四位的值反转时,只要将掌握旌旗灯号按相反的次序给出即可.可以经由过程宏SETEXIOBITMASK(bit,mask)(EXIO.h)来设置扩大I/O 口,个中mask 参数为0xf0.本试验使作的是1-2相励磁方法,还可以运用1相励磁方法和2相励磁方法.*1相励磁方法的次序是ABCD,是以只要设置数组char stepdata[]={0x10,0x20,0x40,0x80} 即可*2相励磁方法的次序是AB,BC,CD,DA,是以只要设置数组char stepdata[]={0x30,0x60,0xc0,0x90} 即可*要实现电机的反转,只需将上面数组的值按相反的次序分列即可4.驱动程序的编程驱动程序采取C说话进行编程,下面是驱动程序中几个重要的函数. static intdo_stepmotor_run(char phase) //经由过程挪用这个函数使步进电机转起来{unsigned intbak; //变量bak用于存放从存放器中读出的值bak = readw(s3c2410_exio_base); //挪用内核函数将基地址为s3c2410_exio_base存放//器的值读出并放在bak中DPRINTK_STEP("s3c2410_exio_base content is %x\n", bak); //调试输出语句tiny_delay(5); //延时函数,有延时功效bitops_mask_bit(phase, 0xf0, &bak);//消除4-8位然后再设置phase传进来的位(也是4-8位)DPRINTK_STEP("s3c2410_exio_base content is%x\n", bak); //调试输出语句tiny_delay(5);writew(bak, s3c2410_exio_base); //挪用内核函数将bak的值写入响应的存放器中bak = readw(s3c2410_exio_base); //再次将存放器的值读出DPRINTK_STEP("s3c2410_exio_base content is %x\n", bak); //运用调试语句再次将修正后的存放器中的值输出,以验证其准确性tiny_delay(5);DPRINTK_STEP("\n");return 0;}驱动程序重要经由过程上面这个函数来使步进电机迁移转变.掌握电机的是一个存放器(地址是s3c2410_exio_base=0x08000100),只要给它恰当的值电机就可以活动起来.这个函数经由过程传递变量phase从运用程序获得数据.然后运用函数readw()把存放器的值就读出并送给bak;经由过程函数bitops_mask_bit()修正bak的值;最后由writew()写回到存放器中.5.运用程序的编程1.步进电机模块步进电机模块和DA 模块是运用Bank1 地址空间扩大出来的IO 口.配合运用驱动s3c2410-exio.o.在驱动程序中,与步进电机相干的重要在函数s3c2410_exio_ioctl:2.对应的运用源程序#include <stdio.h>#include <fcntl.h>#include <string.h>#include <sys/ioctl.h>#define STEPMOTOR_IOCTRL_PHASE 0x13staticintstep_fd = -1;char *STEP_DEV="/dev/exio/0raw"; //界说一个指针指向步进电机的驱动程序/********* A, AB, B, BC, C CD, D, DA ***/charstepdata[]={0x10,0x30,0x20,0x60,0x40,0xc0,0x80,0x90};//各个相位对应的值void Delay(int t) //延时函数{int i;for(;t>0;t--)for(i=0;i<400;i++);}/****************************************************************/int main(intargc, char **argv){int i = 0;if((step_fd=open(STEP_DEV, O_WRONLY))<0){printf("Error opening /dev/exio/0raw device\n");return 1;}/*打开装备的驱动程序,因为LINUX把所有的装备都模仿成文件. step_fd=open(STEP_DEV,0_WRONLY)现实挪用的函数为:staticint s3c2410_exio_open(structinode *inode, struct file *filp)//驱动程序中的装备打开程序*/for (;;) {for (i=0; i<sizeof(stepdata)/sizeof(stepdata[0]); i++) { ioctl(step_fd, STEPMOTOR_IOCTRL_PHASE,stepdata[i]);}/*程序进入一个逝世轮回,如许可以使电机在没有工资停滞的状况下,一向的迁移转变下去.*第二层for语句轮回一次即电机迁移转变一周.函数ioctl()对应函数*s3c2410_exio_ioctl()*而这个函数最终将挪用函数do_stepmotor_run((char)arg);使步进电机迁移转变起来.*/printf("Delay(100)\n");Delay(100);}close(step_fd); //程序停滞时封闭装备printf("Step motor start running!\n");return 0; }__。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
linux 内核移植移植环境配置 mplayer demos 详解 UP-NetARM2410-S的硬件配置2008-09-11 16:08配置名称型号说明CPUARM920T 结构芯片三星S3c2410X工作频率203MHzFLASHSAMSUNG K9F120864M NANDSDRAMHY57V561620AT-H32M×2=64MEtherNet 网卡AX8879610/100M 自适应LCDLQ080V3DG018 寸16bit TFT触摸屏SX-080-W4R-FBFM7843 驱动US B 接口4 个HOST /1 个DEVICE由AT43301 构成USB HUBUART/IrDA2 个RS232,1 个RS485,1 个IrDA从处理器的UART2 引出AD由S3C2410 芯片引出3 个电位器控制输入AUDIOIIS 总线,UDA1341 芯片44.1KHz 音频扩展卡插槽168Pin EXPORT总线直接扩展GPS_GPRS 扩展板SIMCOM 的SIM100-E 模块支持双道语音通信IDE/CF 卡插座笔记本硬盘,CF 卡PCMCIA 和SD 卡插座PCMCIA 型号为DWL-650PS2PC 键盘和鼠标由ATMEGA8 单片机控制IC 卡座AT24CXX 系列由ATMEGA8 单片机控制DC/STEP 电机DC 由PWM 控制,STEP 由74HC573 控制CAN BUS由 MCP2510 和TJA1050 构成Double DAMAX504一个10 位DAC 端口调试接口JTAG14 针、20 针表UP-NetARM2410-S的硬件配置S3c2410X 芯片集成了大量的功能单元,包括:1. 内部1 .8V,存储器3.3V,外部IO3.3V,16KB 数据CACH,16KB 指令CACH,MMU;2. 内置外部存储器控制器(SDRAM 控制和芯片选择逻辑);3. LCD 控制器(最高4K 色 STN和256K 彩色TFT),一个LCD 专用DMA;4. 4 路带外部请求线的DMA;5. 三个通用异步串行端口(IrDA1.0, 16-Byte Tx FIFO, and 16-Byte Rx FIFO),2 通道SPI;6. 一个多主IIC 总线,一个IIS 总线控制器;7. SD 主接口版本1.0 和多媒体卡协议版本2.11 兼容;8. 2 个USB HOS T ,一个USB DEVICE(VER1.1);9. 4 个PWM 定时器和一个内部定时器;10. 看门狗定时器;11. 117 个通用IO;12. 24 个外部中断;13. 电源控制模式:标准、慢速、休眠、掉电;14. 8 通道10 位ADC 和触摸屏接口;15. 带日历功能的实时时钟;16. 芯片内置PLL;17. 设计用于手持设备和通用嵌入式系统;18. 16/32 位RISC 体系结构,使用ARM920T CPU 核的强大指令集;19. ARM 带MMU 的先进的体系结构支持WINCE、EPOC32、LINUX;20. 指令缓存(cache)、数据缓存、写缓冲和物理地址TAG RAM,减小了对主存储器带宽和性能的影响;21. ARM920T CPU 核支持 ARM 调试的体系结构;22. 内部先进的位控制器总线(AMBA2.0, AHB/APB) .系统管理:1. 小端/大端支持;2. 地址空间:每个BANK128MB(全部1G 字节);3. 每个BANK 可编程为8/16/32 位数据总线;4. bank 0 到bank 6 为固定起始地址;5. bank 7 可编程BANK 起始地址和大小;6. 一共8 个存储器BANK;7. 6 个存储器BANK 用于ROM, SRAM 和其他;8. 2 个存储器BANK 用于ROM, SRAM 和同步DRAM;9. 每个存储器BANK 可编程存取周期;10. 支持等待信号用以扩展总线周期;11. 支持SDRAM 掉电模式下的自刷新;12.支持不同类型的ROM 用于启动NOR/NAND Flash, EEPROM 和其他。
建立开发环境。
操作系统一般使用REDHAT-LINUX,也可以用其它发行版本。
选择定制安装或全部安装,通过网络下载相应的GCC 交叉编译器进行安装(比如arm-linux-gcc、arm-uclibc-gcc),或者安装产品厂家提供的交叉编译器。
配置开发主机。
配置MINICOM,一般参数为波特率115200,数据位8 位,停止位1,无奇偶校验,软硬件控制流设为无。
在WINDOWS 下的超级终端的配置也是这样。
MINICOM 软件的作用是作为调试嵌入式开发板信息输出的监视器和键盘输入的工具;配置网络,主要是配置NFS 网络文件系统,需要关闭防火墙,简化嵌入式网络调试环境设置过程。
建立引导装载程序BOOTLOADER,从网络上下载一些公开源代码的BOOTLOADER,如U-BOOT、BLOB、VIVI、LILO、ARM-BOOT、RED-BOOT 等,根据自己具体芯片进行移植修改。
有些芯片没有内置引导装载程序,比如三星的ARM7、ARM9 系列芯片,这样就需要编写烧写开发板上flash 的烧写程序,网络上有免费下载的WINDOWS 下通过JTAG 并口简易仿真器烧写ARM 外围flash 芯片的程序。
也有LINUX 下公开源代码的J-FLASH 程序。
如果不能烧写自己的开发板,就需要根据自己的具体电路进行源代码修改。
这是让系统可以正常运行的第一步。
如果你购买了厂家的仿真器当然比较容易烧写flash 了,但是其中的核心技术是无法了解的。
这对于需要迅速开发应用的人来说可以极大地提高开发速度。
下载别人已经移植好的LINUX 操作系统,如UCLINUX、ARM-LINUX、PPC-LINUX 等,如果有专门针对你所使用的CPU 移植好的LINUX 操作系统那是再好不过,下载后再添加自己的特定硬件的驱动程序,进行调试修改,对于带MMU 的CPU 可以使用模块方式调试驱动,对于UCLINUX 这样的系统好像只能编译进内核进行调试。
建立根文件系统,从下载使用BUSYBOX 软件进行功能裁减,产生一个最基本的根文件系统,再根据自己的应用需要添加其他的程序。
默认的启动脚本一般都不会符合应用的需要,所以就要修改根文件系统中的启动脚本,它的存放位置位于/etc目录下,包括:/etc/init.d/rc.S、/etc/profile、/etc/.profile 等,自动挂装文件系统的配置文件/etc/fstab,具体情况会随系统不同而不同。
根文件系统在嵌入式系统中一般设为只读,需要使用mkcramfs 、genromfs等工具产生烧写映象文件。
建立应用程序的flash 磁盘分区,一般使用JFFS2 或YAFFS 文件系统,这需要在内核中提供这些文件系统的驱动,有的系统使用一个线性flash(NOR 型)512K -32M,有的系统使用非线性flash(NAND 型)8-512M,有的两个同时使用,需要根据应用规划flash 的分区方案。
开发应用程序,可以下载到根文件系统中,也可以放入YAFFS、JFFS2 文件系统中,有的应用程序不使用根文件系统,而是直接将应用程序和内核设计在一起,这有点类似于UCOS-II 的方式。
烧写内核、根文件系统、应用程序。
发布产品。
配置MINICOM:1.在linux 操作系统 Xwindow 界面下建立终端(在桌面上点击右键——>新建终端),在终端的命令行提示符后输入 minicom,回车,你就会看到minicom 的启动画面(见图1)。
若没有启动 Xwindow 则在命令行提示符后直接输入minicom 即可。
2.minicom 启动后,先按Ctrl+A 键,再按Z 键(注意不是连续按,Ctrl+A 松开后才按Z),进入主配置界面(见图1)。
图1 minicom 启动画面图2 主配置界面按“O”进入配置界面,如图3 配置界面图3 配置界面按上下键选择Serial port setup,进入端口设置界面,这里有几个重要选项改为如下值:(在Change which setting 后按哪个字母就进入哪项的配置,如按A 进行端口号配置。
) A————Serial Device :/dev/ttyS0 (端口号使用串口1) E————BPS/par/bits :/115200 8N1 (波特率) F,E 硬件流,软件流都改为NO,若要使用PC 机的串口2 来接板子的串口1 做监控,改为:/dev/ttyS1 即可。
3.选好后按ESC 键退出到图3 所示画面,选择Save setup as df1 保存退出,以后只要启动minicom 就是该配置,无需再做改动。
4.配置完成后,用串口线连接好pc 机和2410-S,启动2410-S,即可在minicom 上看到启动信息,并可以执行操作控制。
Linux 开发软件的安装目录结构表格2 均以/arm2410s 目录为起点:表2/arm2410s 下的文件说明目录名说明busybox-1.00-pre10Busybox-1.00 源代码root2410-S平台根文件系统kernel-2410s2410-S平台linux 内核源代码imgvivi系统引导程序zImageARMLINUX-2.4 内核压缩映象文件root.cramfs根文件系统映象文件yaffs.tar.bz2demos 演示程序的压缩文件编译器安装路径说明如表3 所示:表4 编译器安装路径说明编译器安装目录说明arm-linux-gcc/armtools/bin/主编译器上述诸多程序的源代码都在光盘中提供。
在安装完成LINUX 后,就是对LINUX 的网络环境的配置,最主要是配置NFS 服务器硬件连接:连接电源,将5V电源线的连到UP-NETARM2410-S的电源接口;连接串口线,一端连接PC的串口,另一端连接到UP-NETARM2410-S的串口(上面的);连接网线,将随机附带的交叉网线把UP-NETARM2410-S靠近于电源接口的网口和PC机的网口连接好。
建立超级终端:运行Windows系统下(以WindowsXP为例)开始→所有程序→附件→通讯→超级终端(HyperTerminal)。
请大家注意:在windows xp操作系统下,当初次建立超级终端的时候,会出现如下对话框,请在□中打上√,并选择否。
1 新建一个通信终端。
如果要求输入区号、电话号码等信息请随意输入,出现如图1所示对话框时,为所建超级终端取名为arm,可以为其选一个图标。
单击确定按钮。
图1 创建超级终端2 在接下来的对话框中选择ARM开发平台实际连接的PC机串口(如COM1),按确定后出现如图2所示的属性对话框,设置通信的格式和协议。