USB-CAN转换接口设计
USB总线与CAN总线协议转换器设计
第2 9卷
第 3期
东
华
理
工 学
院
学
报
Vo. 9 No 3 12 .
Se o.2 6 0O
20 0 6年 9月
E HNOL OGY J OURNAL OF EA T C NA I S I UT OF T C S HI N T T E
收 稿 日期 :o 51 —8 2 o .ol
① P i ssm c d c r 19 ・ J 1o t da n A 。 1 h i e i n u s 9 9 SA O o s n — 。ec N cn o l p 。 。・ a 1 r・
1 ・
免地 遇到 如何 交换 控 制 现场 与计算 机 ( 务 器 ) 服 之 间信 息 的问题 , 也是本 文要 讨论 的 问题 。 这
Sr l u) 是 由 ItlIM, i ootN C等 公 司 ea B s , i ne,B Mc sf E r ,
共 同开发 的 P C外设接 口标 准 。U B的 主要 特 点 是 S
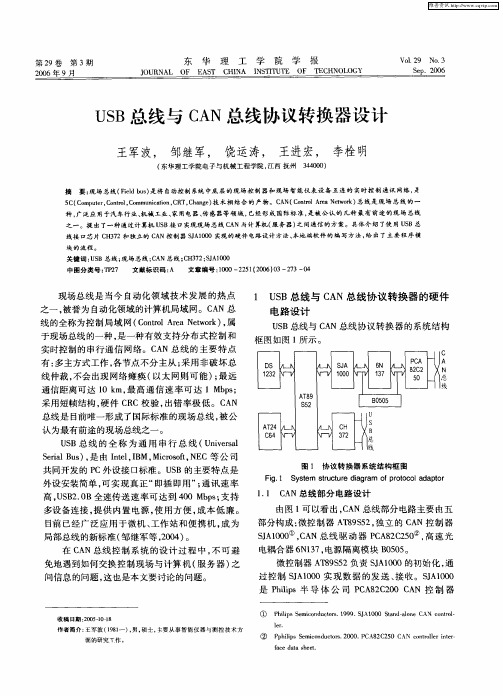
图 1 协 议 转 换 器 系统 结 构 框 图
Fg 1 S se srcu e da a o rt c l d po i. y tm t t r igrm fp oo o a t r u a
1 U B总 线 与 C N总 线 协 议 转 换 器 的 硬 件 S A
电路 设计
U B总线 与 C N总线 协 议转 换 器 的 系统 结 构 S A
框 图 如图 1所示 。
之一 , 被誉为 自动化领域的计算机局域网。C N总 A 线 的全称 为 控 制局 域 网 ( ot l raN tok , C nr e e r ) 属 oA w
CAN—USB转换卡的设计

理速 度和 丰富 的资源 ,可 以大 大减少外 围器件 ,同时该芯 片的 功耗相 对较 低 ,可 以显 著减 小装 置体积 和降
低系 统功耗 .电源 电路 设计 如 图 2所 示 .
图2 电源 电路 设 汁
收 稿 日期 :2 0 — 0 — 1 o8 4 0
作 者 简 介 :张艳 芬 (9 6一) 17 ,女 ,辽 宁 海 城 市 人 ,助 理 研究 员 ,主要 从 事 智 能 控 制 、单 片 机 开 发 研 究
了 5n 的 限 流 电 阻 和 3 F 的 滤 0p
波电 容 .另 外 10 Q 的 电 阻 是 在 2 总线上 的终 端器件 上 接入 的 ,因
图 A 接口电 3C N 路
此 能够改善 系统 的 E MC性能 ,使 系统能稳 定可 靠地工 作 .C N 接 口电路 如图 3所示 , A US B接 口采用 南京沁 恒 电子有 限公 司生产 的芯 片 C 7 V, +3 3V 的工 作 电 压 ,支 持 全速 1 的 H3 5 . 2M
C AN—U B转 换 卡 是 十 分 必 要 的 . S 1 硬 件 设 计
设 计 中 ,U B接 口支 持 US 2 0全 速模 式 ,C N 接 口支 持 C 2 0 ( 全 兼 容 C 2 0 ,操 作模 S B . A N A .B 完 AN .A) 式支持 P l AN模式 .P eC i J C机 把待 发送
为了减 小 体 积、 功耗 及 降低 成 本 ,设 计 U B 线 S总 C N 线 A总 中所 有功能 电路 尽 量 采 用 集 成 芯 片 .系 图 1 系统 奉 阁 统 的总体框 图如 图 1 示 . 所 低功耗 成为 衡 量 产 品 性 能 的一 个 重 要 指标 ,低 电 压 供 电 已经 成 为 趋 势 , 因此 系 统 的 工 作 电压 采 用 3 3V.根据 这一 指标 ,所设 计 的转换 卡选 用 C 0 1 0 0单片 机作 为核 心处 理芯 片 ,该 芯 片具 有较 高 的处 . 85F 4
基于stm32单片机的can-usb转换器设计
第05期刘大鹏:基于S T M32单片机的C A N-U S B转换器设计基于STM32单片机的CAN-USB转换器设计刘大鹏(中国软件评测中心,物联网促进中心,北京,100048)摘 要:随着人们对资源的消耗以及由此带来的环境污染,而引发社会的广泛关注,新能源汽车技术发展也由此受到青睐。
在新能源汽车中,电动车电池性能及电量的准确测量与显示是电池技术的重要一部分。
本系统以STM32微处理器为核心控制器,设计了USB-CAN转换器,可实现电池电量的实时测量与显示。
该系统置于电动汽车电子系统中,可将电池电量等状态信息放至CAN总线上,再通过CAN-USB转换器传入PC上位机,将数据通过人机交互界面显示出来,实现数据信息的交互。
关键词:电量显示;CAN-USB转换器;STM32处理器;CAN总线;信息交互中图分类号:TP212 文献标识码:A 文章编号:2095-8412 (2014)05-589-05工业技术创新 URL: http// DOI: 10.14103/j.issn.2095-8412.2014.05.015引言目前,CAN总线已经普遍应用到中高级车辆中,并且在低级车中的应用也不断扩展,很多汽车电子模块都需要通过CAN总线和其他模块进行通信。
在进行汽车电子相关模块的开发中,需要使用上位机中的数据监测、程序分析,进而对车内CAN 总线中的数据进行解析[1],以便确定各节点模块之间通信数据的准确性和可靠性。
此时就需要一个转换器,将CAN总线的数据转换后提供给上位机以供分析。
实际开发中一般使用普通PC机或笔记本电脑作上位机,PC机或笔记本电脑提供的PCI、RS232及USB接口都可以比较方便地经过转换器和CAN总线相连[2]。
但是,基于USB接口拥有易扩展性、传输的快速性及热插拔性等优点,并考虑到硬件资源、传输速率及现场调试的方便性,故大多数情况下选用USB接口。
电动车电池电量的检测以及在汽车屏幕显示是工业技术创新第01卷第05期2014年12月Industrial Technology Innovation Vol.01 No.05 Dec.2014Design of The CAN-USB Converter Base on STM32 MCUDape ng L iu(C hi na Soft w are Te st i ng C ent er & Int erne t Promot ion Center, B ei jing, 100048, China )Abstract: With the consumption of resources and the resulting pollution, caused widespread concern in society, the development of new energy automotive technology has thus favored. In the new energy vehicles, electric vehicle batteries and power performance measurement and accurate display is the important part of the battery technology. This system has taken the STM32 microprocessor as the core controller, and designed the USB-CAN converter, enabling real-time measurement and display battery charge. It has been arranged in the electric vehicle electronic system, the battery charge state information can be put to the CAN bus, and then through the CAN-USB converter incoming PC host computer, the data is displayed through man-machine interface, and it realizes the data information interaction.Key words:Battery Indicator; CAN-USB Converter; STM32 MCU; CAN-Bus; Information interaction主控芯片使用S T M32f103R B T6,U S B控制器使用P D I U S B D12,C A N控制器使用的是STM32f103RBT6内置的CAN控制器,而CAN收发器则采用TJA1050。
基于STM32单片机的CAN-USB转换器设计

,
i n s o c i e t y ,t h e d e v e l o p me n t o f ne w e n e r g y a u t o mo t i v e t e c h no l o gd I n t h e ne w e ne r g y
中 图 分 类 号 :T P 2 1 2 文 献 标 识 码 :A 文章编号 : 2 0 9 5 . 8 4 1 2( 2 0 1 4 ) 0 5 — 5 8 9 . 0 5 DOI :1 0 . 1 4 1 0 3 5 . i s s n . 2 0 9 5 . 8 4 1 2 . 2 0 1 4 . 0 5 . 0 1 5 工 业 技 术创 新 URL: h t t p / / www. c h i n a . i t i . c o m
c h a r g e . I t h a s be e n a r r a ng e d i n t h e e l e c t r i c v e hi c l e e l e c t r o n i c s ys t e m t he b a t t e r y c ha r g e s t a t e i n f o r ma t i o n
USB及CAN总线转换接口说明书

typedef struct CAN_REG
{
uchar ff;
uchar id0;
uchar id1;
uchat id2;
uchar id3;
uchar buffer[8];
} mCAN_REG
定义一个结构体变量,如 CAN_CONFIG,用于请求/应答模式的应用层结构 typedef struct CAN_CONFIG {
CH375ReadData():读取上传数据块。 函数原型:BOOL WINAPI CH375ReadData(ULONG iIndex, // 指定 USB 设备序号, 下同 PVOID oBuffer, // 指向一个足够大的缓冲区,用于保存读取的数据 PULONG ioLength ); // 指向长度单元,输入时为准备读取的长度,返回后为实际读取的 长度,最大长度为 64 个字节。 返回值:操作状态,成功或失败 CH375WriteData():下传数据块 函数原型:BOOL WINAPI CH371WriteData(ULONG iIndex, PVOID iBuffer, // 指向一个缓冲区,放置准备写出的数据 PULONG ioLength ); // 指向长度单元,输入时为准备写出的长度,返回后为实际写出的 长度,最大长度为 64 个字节。 返回值:操作状态,成功或失败 typedef VOID ( * mPCH375_INT_ROUTINE ) ( // 中断服务程序 PUCHAR iBuffer ); // 指向一个缓冲区,提供当前的中断特征数据 CH375WaitInterrupt();等待中断事件 BOOL WINAPI CH375WaitInterrupt(ULONG iIndex, PVOID oBuffer ); // 指向一个足够大的缓冲区,用于保存中断特征数据,为 NULL 则无 需返回数据 CH375AbortWaitInt();放弃等待中断 BOOL WINAPI CH375AbortWaitInt( ULONG iIndex ); CH371SetIntRoutine();设定中断服务程序 BOOL WINAPI CH375SetIntRoutine( ULONG iIndex, mPCH371_INT_ROUTINE iIntRoutine ); // 指定中断服务程序,为 NULL 则取消中断 服务,否则在中断时调用该程序
USB与CAN总线的接口设计

S A 0 n o p e e t e s n n n e e v n f CAN r me J 1 0 a d c m lt h e di g a d r c i i g o 0 f a .Th e AD u f S A 0 0 c n e t d wih t e I0 f b s o J 1 0 o n ce t h / o
关键 词 :US B;CA N;总线 接 口;CY C6 0 3 7 8 1 A;S A10 ; 固件 程序 J 00 中图 分类 号 :T 3 32 P0. 文献 标识 码 :A
I t ra eDe i n o B a d CAN n e f c sg fUS n
NI D e qi U — ng
摘要 :US 总线 与 CA 总线 的接 口设 计 ,由 于 C C 8 1 A单 片机 支持 US . 议 ,采用 其 固件程 序处 理上 B N Y7 6 0 3 B20协 位机 驱动 程序 的请 求 ,完 成与 上位 机 的 US 通讯 ,并控 制 S A10 ,完成 C B J 00 AN报 文 帧 的收发 。S A1 0 J 0 0的地 址 、 数 据 总线 与 C C6 0 3 Y7 8 1 A的 IO 口相连 ,利用软 件 通过 IO 口模 拟 S A1 0 / / J 0 0的通 讯 时序 。
1 硬 件设 计
硬 件 采 用 带 US B的单 片 机 加 CAN控 制 器 构成 ,
如图 1 。单 片 机选 用 Cy rs 公 司 C C6 0 3 pe s Y7 8 1 A,支
的数据 、地址总线 、控制信号线相连 ,利用 软件通 过 I O 口模 拟 S A1 0 / J 0 0的通 讯 时序 。C C6 0 3 Y7 8 1 A 的 IO 口较 多 ,系统 加 入 2路 C / AN。为提 高抗 干 扰 能 力 ,C AN 通 道 加 入 数 字信 号 隔 离 电路 。
USB转CAN原理图

D
PDF 文件使用 "pdfFactory Pro" 试用版本创建
1
2
3
4
3V3 A U3 C30 100nF 2 1 C32 100nF TXD232 RXD232 TXD_DBG RXD_DBG B 6 C33 100nF MAX3232 VGND 15 3 11 12 10 9 16 5 C31 100nF 4 JP6 14 13 7 8 1 2 3 Header 3 JP7 1 2 3 Header 3 B C29 100nF VCC C2C2+ T1out R1in T2out R2in A
1
2
3 R10 2K
4
DDP DDM
DS4 ERASE NRST JTAGSEL TDO TCK TMS TDI 3V3 C2 100nF
3V3 C1 100nF 10uF
3V3
A C17 VDDOUT1V8 7 C18 C5 C6 100nF 100nF 3V3 C8 C9 C10 100nF 100nF 100nF C11 100nF 100nF Tan Cap 10uF C4 VDDOUT1V8 15 37 100nF 62 100nF 87 C7 17 33 48 61 84 C3
V+ C1+ C1T1in R1out T2in R2out
+5V C34 100nF MAX488CSA U6 VCC RXD422 2
R
+5V
RX+
U4 1 VIN1 VOUT1 JP5 1 2 3 4 Header 4
TX+ RX-
C
+5V 1 8 7 6 5
RX+ RXTXTX+
USB—CAN—RS232总线转换电路设计及实现

『IM¥ 2 C 0 0C U a dIs ut nSt eee c 5T 3 0 6 0 P n t c o e R frne nr i
业 出 版 社 .0 4 20 .
G i [1 ea nt me t.0 0 ud Z. x s s e T I r n 20 . u s
2 各 种 总 线 的特 点
21 AN ( nr l rAraN t r ) . C Co to e e ewo k l
U B 即“ 用 串行 总 线 ” 是一 种 应 用 在 P S 通 , C中 的表型 总线 ,由 ItlMirsf N C等公 司共 同提 ne、 coo 、 E t
维普资讯
U B C N R 2 2总 线 转 换 电路 设 计 及 实现 S — A — S3 ●应 用 与 设 计
一 1 3一
US — A RS 3 B C N— 2 2总线 转换 电路设计 及实 现
吴志伟 ,丁 铂
( 西安 科 技 大 学 机械 工程 学 院 ,陕 西 西安 7 0 5 ) 1 0 4
t n a d srn n fn t nT e MAX2 2,J 0 0 a d US i n t g i u ci .h o o o 3 S A1 0 n BN9 0 rd c d c re p n igyb x 6 3 po u e ors o dn l y Ma -
a a td t cu la p ia in i gv n d p e o a t a p l t s ie . c o
Ke r s b s sn l— hp mirc mp tr MA 3 ; S A1 0 ; US 9 0 ywo d : u ; ige— i co o ue; c X2 2 J 0 0 BN 6 3
usb转can芯片

usb转can芯片USB转CAN芯片是一种集成电路芯片,用于USB接口和CAN总线之间的数据转换和通信。
它可广泛应用于汽车电子、工业自动化、航空航天等领域,实现USB与CAN总线之间的数据交互。
USB转CAN芯片的具体设计和工作原理如下:一、设计要点:1. 功耗控制:为了确保芯片在工作过程中的稳定性和可靠性,需要对芯片的功耗进行合理控制,以免过载或过热。
2. 性能优化:芯片应尽可能地提高通信速率和数据传输的可靠性,以满足实际应用需求。
3. 兼容性:芯片应支持USB和CAN总线的各种版本和规范,以便与不同设备和系统进行通信。
二、工作原理:1. USB接口部分:芯片通过USB接口将外部设备(如计算机或控制器)连接到CAN总线。
它将USB的数据传输格式和CAN总线的物理层进行转换。
2. CAN总线部分:芯片通过CAN总线与其他设备进行通信。
它接收来自USB接口的数据,并将其转换为CAN总线上的数据格式。
同时,它还能监听CAN总线上的数据,并将其转换为USB接口可以理解的格式。
这样,芯片就能实现USB与CAN总线之间的双向数据通信。
三、主要特点:1. 低功耗:芯片设计合理,功耗较低,适合长时间稳定工作。
2. 高效性能:芯片具备高速数据传输和可靠性,可满足实时数据传输的需求。
3. 多样接口:芯片可支持多种不同类型的USB和CAN总线接口,以适应不同应用场景。
4. 兼容性:芯片能够兼容各种USB和CAN总线的版本和规范,与其他设备和系统兼容性良好。
5. 稳定可靠:芯片的设计和制造精良,具有稳定的性能和可靠性,能够满足各种工作环境的需求。
四、应用领域:1. 汽车电子:用于汽车中的CAN总线与计算机之间的通信,实现汽车的诊断、控制和调试功能。
2. 工业自动化:用于工业控制系统中的数据传输和通信,实现设备之间的联网和数据交互。
3. 航空航天:用于飞机、宇航器等飞行器中的控制和通信系统,实现数据的采集、传输和处理。
基于ARM9的USB与多通道CAN转换器的设计
的 特 点 相 结 合 , 上 位 机 能 够 通 过 U B接 口 同 时 监 视 多 个 C N 通 道 ( 多 8个 ) 完 成 U B 总 线 与 使 S A 最 , S
I
Comd I Ap l t s c on
基于 A M9的 U B与多通道 C N转换器 的设计 R S A
杨 晔 , 曲 波
( 州 大 学 电 子 信 息 学 院 ,江 苏 苏 州 2 5 2 ) 苏 10 1
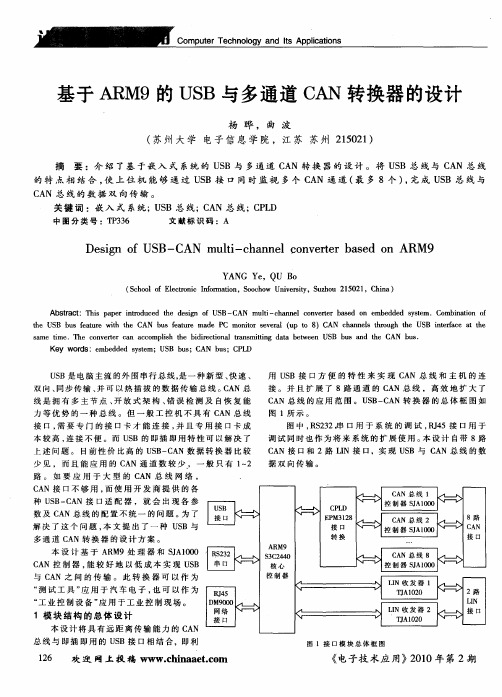
图 1所 示 。
力 等 优 势 的 一 种 总 线 。 但 一 般 工 控 机 不 具 有 C N 总 线 A
接 口 , 要 专 门 的 接 口 卡 才 能 连 接 , 且 专 用 接 口卡 成 需 并 本 较 高 , 接 不 便 。而 US 的 即 插 即 用 特 性 可 以 解 决 了 连 B
上 述 问 题 。 目前 性 价 比 高 的 U B— A S C N数 据 转 换 器 比较 少 见 ,而 且 能 应 用 的 C N 通 道 数 较 少 ,一 般 只 有 1 2 A ~ 路 。如 要 应 用 于 大 型 的 C N 总 线 网 络 , A 、
图 中 , S 3 串 口 用 于 系 统 的 调 试 , J 5 接 口 用 于 R 2 2. R4
te U B b sfa r i h A u etr maeP nt eea u o 8 A hn e hog e U B i e aea h h S u et ewt teC N b sf ue d C moirsvrl(p t )C N c an l t u h t S n r c tte u h a o s r h tf
usb转can模块“一颗强劲的芯”
usb转can模块“一颗强劲的芯”
CAN 总线解析
一、典型应用
CAN-bus 网络诊断与测试
汽车电子应用
电力通讯网络
工业控制设备
高速、大数据量通讯
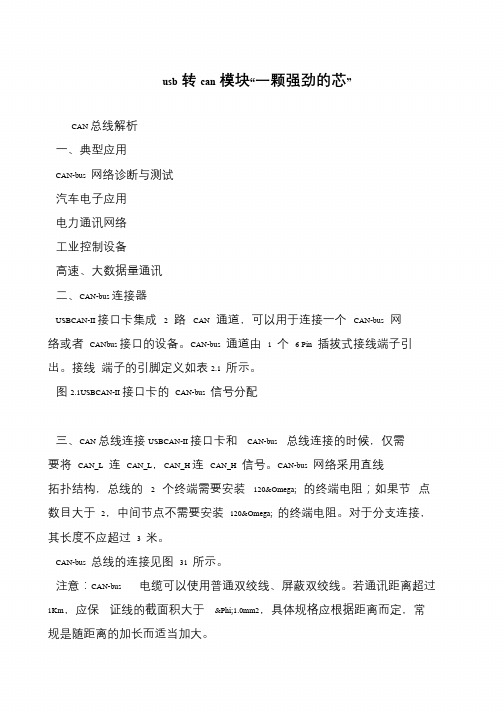
二、CAN-bus 连接器
USBCAN-II 接口卡集成 2 路CAN 通道,可以用于连接一个CAN-bus 网络或者CANbus 接口的设备。
CAN-bus 通道由 1 个 6 Pin 插拔式接线端子引出。
接线端子的引脚定义如表2.1 所示。
图2.1USBCAN-II 接口卡的CAN-bus 信号分配
三、CAN 总线连接USBCAN-II 接口卡和CAN-bus 总线连接的时候,仅需要将CAN_L 连CAN_L,CAN_H 连CAN_H 信号。
CAN-bus 网络采用直线拓扑结构,总线的 2 个终端需要安装120Ω 的终端电阻;如果节点数目大于2,中间节点不需要安装120Ω 的终端电阻。
对于分支连接,其长度不应超过3 米。
CAN-bus 总线的连接见图31 所示。
注意:CAN-bus 电缆可以使用普通双绞线、屏蔽双绞线。
若通讯距离超过1Km,应保证线的截面积大于Φ1.0mm2,具体规格应根据距离而定,常规是随距离的加长而适当加大。
基于USB接口的CAN总线适配器设计

r .
r
判断U B S 数据 判断cA A 2 Nl N
命令标志 一 数据命令标志 . 1 ● 解析命令数据码
解析命令数{ 码 I ; i
(S ' ̄ usl Au ' l :
磺 CANI 。
●
接收P S 数据 C[
C N2 A 数据 命令
(主程序流程图 a )
流程 图
图 2 主程 序 流 程 图
I序 蓄捌发送
l
N P Ad
●
(s巾 返l UB 断 a 1 ]
程领域 , 尤其在系统优化诊断和维护方面。 C AN通信控制 电路主要包括S A10 J 00
独立控制器 、 C 2 2 0 P A8 C 5总线收发器和6 N 17 3 高速隔离光耦等器 件。 c 2 2 O P A8 c 5 可以 提供对总线的差动发送和接收 , 从而提高了
能控 制 器 和 收 发器 符 合通 用 串 行 总 线规 范
( 开 ) 始
初始化U B S
●
韧始化
s A10 J 00
L
2 0 实验测试表 明 : .版。 微控制器F 4 的U 30 S B 口与 计 算 机之 间 的 通 信 速 度 最 快 可 以 接
达 到 5 0 b ts s 0 K y e/ 。
●
一 .
22 C L 电路 的 设计 . PD
CL P D电路主要完成对C 控制器S A AN J 10 内部寄存器和S 00 RAM的地址分配, 以及 对相关外设间接 口的数字逻辑 电路的集成 。 通过 C L 编程 可 以灵 活地 实 现 单 片机 Ms PD RAM的访 问和对两路C AN总线控制器 的
基于PIC18F258和PDIUSBD12的USB—CAN转换接口设计

20 焦 06
仪 表 技 术 与 传 感 器
I s u n T c nq e a S n o n t me t e h iu M r e sr
2o o6 N0. 0 1
第 1 期 0
基 于 P C 8 2 8和 P I S D 2的 U B—C N转 换 接 口设 计 I 1F 5 DU B 1 S A
U B驱动程序设计 , S 这种设计方法快捷 、 方便 , 为上位机 驱动程序的设计提供 了一种 新的解决思路 。系统 已经成功应 用在
虚 拟 车辆 模 拟 测 试 系统 中 。
关 键 词 : S ;A 总 线 ;aWi o sV S 微 控 制 器 编 程 UBC N L b n w ; IA; d
制器 。
在系统中 P IS D 2与 PC 8 28的硬 件连接 采用 了单地 DU B 1 I 1F5
址/ 数据总线配置 方案。主控 C U的 P R C连接 D 2的双 向数 P OT 1 据 1, 3 通过对 R 读选通 , DN( 低有 效) WR N 写选通 , 和 —( 低有 效 )
控制 实现对 P I S D 2的读 写 P IS D 2的地 址位 A 连 接 DU B 1 DU B 1 0 主控 制器 的 R 0 A 0时选择命令 , 0 时选择 数据。ITN A , 0= A =1 N _ 是 U B中断请求脚 , S 发出 U B中断请求 ; LN是 @ D K指 S G— UN 示灯 , 在调试过程 中非 常有 用 , 在通 信时会 不停 闪烁 , 如果一 直
主控 制器通过 固件 程序与 计算 机进 行数 据交换 。固件 设
计的 目的是 : P IS D 2在 U B上 达到最 大的传输 速率 ; 使 DU B 1 S 增
基于ARM7处理器LPC2119的USB-CAN转换器设计

基于ARM7处理器LPC2119的USB-CAN 转换器设计作者:高敏来源:《现代电子技术》2010年第22期摘要:叙述一种使用ARM7处理器实现USB接口与CAN总线的方案,通过其可以在PC实现对CAN总线上设备的监控。
系统的主控制器为NXP公司的ARM处理器LPC2119,内部集成两路独立的CAN控制器。
USB接口采用沁恒电子的CH375。
描述了USB-CAN通信接口工作的基本原理及CAN总线与USB之间的硬件接口电路。
同时,分析了固件编程及使用通用I/O模拟并口读写时序方法。
关键词:CAN总线; USB; LPC2119; CH375中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2010)22-0142-03Design of USB-CAN Converter Based on LPC2119 of ARM7 ProcessorGAO Min(Department of Applied Electronics, Jiangsu Nantong Commercial Vocational College, Nantong 226007, China)Abstract: A scheme of using ARM7 processor to realize the USB interface and CAN bus is introduced, which can monitor the devices of CAN bus on PC. The system's main controller is ARM processor LPC2119 produced by NXP, which integrated two independent CAN controllers. USB interface circuit adopts QinHeng Electronics CH375. The basic principles about the USB-CAN communication interface and the hardware interface circuit between CAN and USB are described. At the same time, the method of the firmware programming and the use of general-purpose I/O port to simulate parallel read /write timing are analyzed.Keywords: CAN Bus; USB; LPC2119; CH3750 引言控制器局域网(controller area network,CAN)是世纪年代德国BOSCH公司为现代汽车应用而推出的一种多主机局部网,由于CAN总线具有可靠性高、功能完善、成本合理、实时性等优点,CAN总线早已不再局限于汽车行业,而被广泛应用于各个自动化控制系统中,例如汽车电子、工业控制、智能大厦、安防监控、环境控制等。
USB转CAN接口设计

CAN总线与USB的转接技术USB(Universal Serial Bus)是一种通用串行总线。
随着计算机技术的发展和广泛应用,人们对串行总线提出了更高的要求。
因此,开发一种兼容低速和高速的技术,从而为广大用户提供一种可共享、可扩充、使用方便的串行总线已成为众多厂商的共同目标。
USB总线就是一种新型、快速、双向、同步传输、并可以热插拔的数据传输总线,它满足了人们对总线易用性、扩展能力强和低成本的要求,因此,USB在PC外设领域的传输速率从1.5Mbps的低速和12 Mbps 的全速提高到如今的480 Mbps的高速数据传输。
目前,USB总线已经逐渐成为计算机领域中应用最广泛的外设总线连接规范。
与此同时CAN(Controller Area Network)总线技术也日趋成熟,其传输距离远,传输速率高,抗干扰能力强,易于组网,而且节约成本,已被公认为是最有前途的现场总线之一,并在国内外控制领域获得了普遍重视。
目前,德国现代汽车公司和欧洲其他几个主要汽车公司的车内控制系统全部采用CAN总线,国内的很多工业控制系统,(如车载控制系统、医疗控制系统和很多智能小区中的智能控制系统)都采用了CAN 总线技术。
随着更加完善的CAN2.0B协议的提出,国外已有专家提出预言,CAN总线的应用寿命至少还有二十年。
虽然上述两种总线的特点都比较突出,但二者在控制领域的应用仍有其自身局限性。
USB的传输距离通常不超过几十米,经常达不到工业应用的要求;而CAN适配器与主机在传统接口上的连接十分繁琐和复杂,不利于CAN的应用扩展。
所以,本设计考虑将传输距离较远的CAN总线技术与即插即用的USB接口技术相结合,即利用USB接口方便的实现CAN总线和主机的连接,从而有力的扩展了CAN总线的监控和管理功能,扩大CAN总线的应用范围。
1 接口模块的总体设计本文所介绍的USB-CAN转接技术总体框图如图1所示,该设计分两大部分:一是与主机USB接口相连的USB控制部分;二是与CAN总线相连的CAN控制器部分。
基于USB的CAN总线转接器设计

( c o l f c a i l n l t ncC nr l n i eig e igJ o o gUn es y B in O O 4 S h o h nc d E e r i o t gn r ,B in i tn i r i , e ig1 O 4 ) o Me aa co oE e n j a v t j
P US D1 . DI B CAN u traec i J 0 0a dteitraacrut t 2 B s nefc hpSA1 0 n efc i i wi AVR, n emeh dt a igehpc m— i h n c h a dt to h t n lc i o h s
Ab ta t sr c :Th e in o ed sg faCAN u o b sc mm u a o a eo S wa u o wa d Th a e any ds u s d t e u eo t t rb s n U B sp tf r r . e p p rm il ic s e h s f
we ee pan d i eal. Thi e i nc nma ep o o o y is l a d h v h bl yo mo tzn aa r x lie d tis n sd sg a k r t c lb ef n a et ea it f t i a riig d t.Th e u tid— er s l i n c t st a h e i ni e sb e a e h tt ed sg Sfa il. Ke wo d :CAN u ; S y rs b s U B;sn lc i AVR i e hp; g
维普资讯
与 开 发
第 7 月 2 0 年] 0
2 卷 第] 5 期
can接口线路方案

CAN模块的连接方案一、介绍DB9\CAN485、CAN232、USB-CAN卡的各个接口DB9RS485端子接RS485串口Vin连接电源正(7-24V)OV连接电源地(0V)CFG连接配置引脚GND连接电源地A+连接RS485 信号正端B- 连接RS485 信号负端Res+、Res-:连接CAN网络终端匹配电阻CANL、CANH:连接CAN通信线的信号线引脚1标示“Vin”接外部+7V~+40V直流电源,引脚2标示“0V”是接外部电源地。
引脚3标示“CFG”是转换器的配置引脚。
该脚悬空时上电后转换器进入正常转换模式;若该引脚和引脚4标示“GND”相连后,转换器上电即进入配置模式。
引脚7标示“Res-”和引脚8标示“Res+”如果被用导线短接,则CAN网络的终端电阻120欧姆被接入(卡内置)。
当CAN232MB/CAN485MB转换器作为CAN-bus网络终端时,两引脚间需要短接(即使用内部的120欧);否则让其悬空(不使用内部的120欧)。
RS232端子接RS232串口Res+、Res-:连接CAN网络终端匹配电阻CANL、CANH:连接CAN通信线的信号线Res+、Res-:连接CAN网络终端匹配电阻CANL、CANH:连接CAN通信线的信号线USB连接在PC机上二、整个通讯线路的连接1)将CAN232MB的CAN-H、CAN-L分别与连接器上的CAN-H、CAN-L相连,Vin 通12V电压,GND、OV接电源地2)将CAN485MB的CAN-H、CAN-L分别与连接器上的CAN-H、CAN-L相连,A+、B-接RS485信号正负端,Vin通12V电压,GND、OV接电源地3)USB-CAN的CAN-H、CAN-L分别与连接器上的CAN-H、CAN-L上。
USB端接PC机。
三、需求清单1)已购买:一个CAN232MB模块,两个CAN485模块,一个USB-CAN卡2)未购买:5米双绞线,10cm的铜片2片,一个长15cm宽8cm 的塑料板一块,固定螺栓6个,锡丝1米。
基于STM32的USB—CAN转换接口设计

先发送一次读请求,并收到 READY 响应后,完成对数据的读 取。至此,完成基于 STM32 的 USB—CAN 转换接口设计。 2 实例分析 2.1 实验准备
本次实例分析,采用硬件设施为型号为 TYR3583589 的上 位机,实验环境包括 :虚拟主机资源数量为 500 ;物理主机地 理距离为 30 ;主机更新常量为 0.1 ;网络权重系数为 0.2。本次 实例分析中设置的实验测试指标为 USB—CAN 转换接口的转 换速率,转换速率越高证明 USB—CAN 转换接口的性能越好。
2020年第24期
2020 No.24
电力系统
Electric System
电力系统装备
Electric Power System Equipment
基于STM32的USB—CAN转换接口设计
杨 柳,张永明,高凯旻,李颖卓 (云南电网有限责任公司昆明供电局,云南昆明 650000)
[摘 要]为解决传统 USB—CAN 转换接口转换速率低的问题,基于 STM32 设计 USB—CAN 转换接口,STM32 处理高速 集成数据,设计 USB—CAN 转换接口连接方式,初始化 USB—CAN 转换接口寄存器,通过 USB—CAN 转换接口与上位机通 信转换,完成基于 STM32 的 USB—CAN 转换接口设计。设计实例分析,结果表明,设计的 USB—CAN 转换接口转换速率明 显高于对照组,能够解决传统 USB—CAN 转换接口转换速率低的问题。
广成科技---USBCANmodul1 can转usb接口说明

USBCANmodul1can转usb接口说明USB-CANmodul1型CAN转USB接口是一款小尺寸又非常高性价比的CAN总线接口方案,可通过USB把CAN总线连接到PC。
CAN报文清晰可见地被传输。
该CAN转USB接口模块支持所有种类的基于CAN的高层协议,例如CANopen、SDS、DeviceNet或J1939。
另外,它的低功率32位CPU核,带有集成报文缓存确保可靠通讯,即使在高总线负荷的情况下。
每个接收的报文都有一个精确的时间戳,由接口模块的硬件定时器给出。
所提供的PC驱动可轻松即插即用安装,并且支持在一台PC上同时使用高达64个USB-CANmodul 型USB CAN接口。
特别有吸引力的性价比和紧凑型结构使该款CAN USB适配器特别适用于基于CAN总线的设备,服务和维护任务,也应用于大量生产的产品上。
参数可用CAN通道:1路PC连接:USB V2.0全速传输类型:bulk,12MbpsCAN接口:1路CAN接口,高速CAN符合ISO11898-2,光电隔离CAN收发器:高速CAN:82C251CAN规范:2.0A(11位标识符)2.0B(29位标识符)CAN连接器:SUB-D9CAN比特率:10kbps至1MbpsCAN总线功能:远程帧只听模式为收到的报文加时间戳接收传输的回声包含时间戳由模块自动传输周期性报文软件支持Windows操作系统:USB-CANmodul Control-该配置工具可管理多个USB-CANmodul型USB CAN模块PCAN View-一款简单的CAN监视器,可接收和传输CAN报文程序员支持的Windows操作系统:全面的程序员API包括演示源,适用于Microsoft VisualC++,LabView,Visual CANopen API –基于SYS TEC CANopen协议栈并可轻松执行CANopen应用程序程序员支持的Linux操作系统:SocketCAN based API(Linux Kernel version2.6.32)设备驱动:Windows,Linux,WinCE5.0,WinCE6.0LED指示灯:LED指示灯用于电源、CAN状态、CAN通讯电源:USB供电电流消耗:常规150mA操作温度:-15℃至+85℃外壳:台式重量:大约40g尺寸:78x45x18(LxWxH,in mm)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
USB-CAN 转换接口设计
摘要:提出一种使用USB
接口实现CAN 总线网络与计算机连接的方案,可以应用在使用上位机监控和CAN 总线的场合。
文中介绍主控制器PIC18F258的CAN 通讯模块特点,USB-CAN 通讯接口工作的基本原理,讨论了CAN 总线与USB 之间的硬件接口电路。
同时,分析了固件编程方法及主控制器程序的架构。
介绍的基于Labwindow/CVI 7.0和VISA 的USB 驱动程序设计,这种设计方法快捷、方便,为上位机驱动程序的设计提供了一种新的解决思路。
系统已经成功应用在虚拟车辆模拟测试系统中。
1 硬件系统设计
系统硬件由3部分组成:USB 通讯器件,主控制器,CAN 电平转换器件。
USB 通讯硬件采用Philips 公司的符合USB1.1规范的器件PDIUSBD12,主控制器使用的是Macmchip 公司的PIC18F258,CAN 电平转换器件使用的是PCA82C250。
系统硬件结构如图1和图2所示:
主控CPU-PIC18F258支持在线仿真的调试方式,内部集成了一个CAN 通讯控制器,可以简化系统的硬件结构,提高系统的可靠性。
此CAN 模块支持CAN2.0A和CAN2.0B协议,可编程的位速率可达1Mbps,支持标准数据帧、扩展数据帧、远程帧、出错帧、过载帧、空闲帧等类型。
CAN模块使用RB3/CANRX和RB2/CANTX/IN32 引脚与CAN 总线驱动器芯片PCA82C250接口。
接口电平电路如图2所示。
PDIUSBD12是Philips公司推出一款性价比很好的USB接口器件,该器件使用并行接口的方式与微控制器进行通讯,使用起来灵活方便,它同时还支持DMA的传输方式。
图1中D+引脚信号电平通过器件SoftConnect命令内部上拉,从而向主机表示为一个全速设备。
SUSPEND是双向引脚,用以向微控制器指示器件是否挂起。
当有USB总线事件发生时,INT引脚向微控制器发出中断信号。
PDIUSBD12支持总线复用和非复用2种并行接口模式,以方便连接不同类型的微控制器。
在系统中PDIUSBD12与PIC18F258的硬件连接采用了单地址/数据总线配置方案。
主控CPU的PORTC连接D12的双向数据13,通过对RD_N(读选通,低有效)和WR_N(写选通,低有效)控制实现对PDIUSBD12的读写PDIUSBD12的地址位
A0连接主控制器的RA0,A0=0时选择命令,A0=1时选择数据。
INT_N是USB中断请求脚,发出USB中断请求;GL_N是GOODLINK指示灯,在调试过程中非常有用,在通信时会不停闪烁,如果一直亮或者一直暗,表示USB接口有问题,如果
D12挂起,则LED关闭。
CLKOUT是D12的时钟输出,可以通过固件编程改变其频
率,在调试固件时,可作为参考。
RESET_N复位引脚接主控CPU的RA1口,可以通过此对其进行复位,工作时需将其置高。
CS_N片选,低有效。
D+、D-为USB的输出数据引脚,是和上位PC机的通讯线。
硬件系统的工作电源由PC机通过USB提供。
2 软件设计
软件设计包括微控制器的编程开发和计算机端USB驱动程序开发两部分。
2.1 微控制器编程开发
主控制器通过固件程序与计算机进行数据交换。
固件设计的目的是:使PDIUSBD12在USB上达到最大的传输速率;增加系统的可扩展性和硬件无关性。
固件要实现的内容:一是对集成的CAN控制器初始化,接收CAN总线送来的数据,收集CAN 网络状态信息,并将主机的数据下发到CAN 网络;二是对PD1USBD12初始化,完成USB总线连接过程,并组织CAN网络和主机之间的数据传送。
设计中采用MPLAB集成开发环境,使用c语言和汇编语言混合编程来完成程序。
2.1.1 PDIUSBDI2 端点设置
D12的端点采用模式0(非同步模式),由于端点0即主端点被固定用于控制输入输出,不能用作通用的输出传输端点,端点
1的最大信息包为16Bytes,采用了端点2作为主数据端点,它的最大信息包为64Bytes.
2.1.2 CAN通讯协议设定
为了使设计具有更好的兼容及可升级性,采用了CAN2.0B扩展帧模式。
在CAN模块的3个接收和发送缓冲器中只使用了发送缓存器0和接收缓冲器0。
通讯波特率为250 Kbit.使用RB3/CANRX和RB2/CANTX/INT2引脚与CAN总线接口。
要配置CANRX和CABTX为CAN接口,需要将主控制器的I/O口分别设置成输入和输出模式。
在CAN配置模式下设置发送缓冲器0为扩展标志符模式,初始化接收过滤器和接收屏蔽器为接收所有CAN数据包。
完成所有配置后,转入正常操作模式。
2.1.3 主程序开发
为了提高固件的运行效率,主程序对系统进行初始化后开放中断,在中断服务程序中对事件进行分析和必要的处理,并设置相应的变量标志和数据缓冲区。
主程序则循环查询变量标志,调用相应的子程序进行处理。
这种程序结构使得主程序能够在前台处理各种数据传送任务,同时又可以通过中断在后台及时处理总线事件。
当主控CPU处理前台任务时USB的传输可在后台进行。
这就确保了最佳的传输速率和更好的软件结构,同时简化了编程和调试。
后台中断服务程序ISR和前台主程序循环之间的数据交换通过事件标志和数据缓冲区来实现。
主程序完成所有I/O配置及CAN初始化配置服务子程序,并等待USB与PC机建立连接。
程序在建立好与上位PC机通讯后即等待数据交换;如果发生CAN接收事件,则将CAN数据包连同标识符一同通过端点2发送到Pc机;如果发生USB接收事件,则将包数据分解为标识符和数据两部分,通过CAN发送服务子程序发送到总线。
主循环流程如图3所示。
整个模块在硬件和软件的设计过程中贯彻了简洁、易维护、易升级的思想,在保证可靠性的前提下,尽量简化设计,为了保证传输的实时性,只负责完成数据的转发工作,复杂的数据处理工作将通过上位机软件LabWindows处理。
2.2 上位机驱动程序的设计
系统的上位机软件的开发使用的是LabWindows/CVI 7.0版本软件。
LabWindows/CVI是National Instruments(美国国家仪器公司,简称NI公司)推出的32位的面向计算机测控领域的虚拟仪器软件开发平台,可以在多操作系统下运行。
LabWindows/CVI是一个基于标准c开放的开发环境,以工程文件为主体框架把c语言源代码文件、头文件、库文件、目标模块、用户界面文件、动态链接库和仪器驱动程序集成在一起,提供内置式函数库用于完成数据采集、分析和显示任务,它还提供简单的拖放式用户界面编辑器以及自动代码生成工具。
利用这些功能,您可以在将代码加入到某项目之前,先对其进行互动式的测试,用LabWindows/CVI定义和建立用户界面,生成或运行ActiveX组件及开发多线程应用。
所使用的USB设备没有现成的驱动程序,而编写驱动程序是一件很困难的事情。
NI公司开发的Labwindows/CVI 7.0版本新增VISA的USB大大方便了USB驱动程序的开发。
NI VISA3.0包含有VISA驱动程序生成向导可以为USB设备创建INF 文件。
另外,它内含丰富的数据采集、数据信号分析以及控制等子程序,用户利用创建和调用子程序的方法编写程序,使创建的程序模块化,易于调试、理解和维护,而且程序编程简单、直观。
在系统中安装完NI_VISA后,从开始菜单中打开程序>>National Instrument>> VISA >> VISA Driver Developer Wizard.可以使用这个向导为PXI/PCI或USB设备创建INF文件,使用的USB设备只要在向导的第一个对话框中选中USB即可,以后按照向导的提示填入一些所使用的USB设备的信息,最终将会在所选择的路径下生成相应的INF文件。
把此文件复制到
c:WINDOWSINF文件夹中并安装,然后就可以安装USB设备了。
USB设备启动后,在应用程序中添加VISA的相关I/O接口软件,就可以实现USB通讯了。
主要函数介绍如下:函数ViOpenDefaultRM得到ⅥsA资源管理器句柄;函数ViOpen打开USB设备句柄;函数ViSetAttribute设置发送和接收端点属性;函数ViGetAttribute查看结果;函数ViRead和Viwrite进行读写数据;函数ViClose释放仪器和资源管理器句柄。
在帮助文件中和LabWindows教材中可以查到上面这些函数的使用方法。
上位机程序中,调用上面给出的这几个函数就能编写实现上位机与USB器件的通讯。
为了实现USB通讯,在传输数据时,读/写数据格式都要与USB协议相兼容。
3 结束语
基于PICI8F258和PDIUSBDI2的USB-CAN转换接口已经成功的应用在虚拟车辆模拟测试系统中,使用方便,运行可靠。
基于Labwindows/CVI 7.0和VISA的USB驱动程程开发难度低,使用灵活方便,大大加快了系统的开发效率。
参考文献:
[1] 宋宇峰.Lab Windows/CVI逐步深入与开发实例.北京:机械工业出版社,2003.
[2] 周立功公司PDIUSBD12相关开发资料.
[3] 刘和平,刘林,余红欣,等.PIC18Fxxx单片机原理及接口程序设计.北京:北京航空航天大学出版社,2004.。