(完整版)动力学建模方法与解法总结
汽车系统动力学第二章 车辆动力学建模方法及基础理论
第二章车辆动力学建模方法及基础理论§2-1 动力学方程的建立方法在车辆动力学研究中,建立系统运动微分方程的传统方法主要有两种:一是利用牛顿矢量力学体系的动量定理及动量矩定理,二是利用拉格朗日的分析力学体系。
本节将对这两种体系作一简单回顾,并介绍几个新的原理。
一牛顿矢量力学体系(1)质点系动量定理质点系动量矢p对时间的导数等于作用于质点系的所有外力F i的矢量和(即主矢),其表达式为:二、分析力学体系分析力学是用分析的方法来讨论力学问题,较适合处理受约束的质点系。
(1)动力学普遍方程动力学普遍方程由拉格朗日(Lagrange)于1760年给出的,方程建立的基本依据是虚位移原理,表示如下:(2-6)(2)拉格朗日方程拉格朗日法的基本思想是将系统的总动能和总势能均以系统变量的形式表示,然后将其代入拉格朗日方程,再对其求偏导数,即可得到系统的运动方程。
拉格朗日方程形式如下:利用此方程推导车辆动力学方程时,因采用广义坐标,从而使描述系统位移的坐标数量大大减少,并可以自动消去无功内力。
但也存在下述问题:①应用拉格朗日方程时,有赖于广义坐标选取得是否得当,而适当地选择广义坐标有时要靠经验;②拉格朗日能量函数对于刚体系统的表达式可能非常复杂,代人拉格朗日方程后要作大量运算。
而对于复杂的车辆系统,写出能量函数的表达式就更加困难。
三、虚功率原理若丹(Jourdain)于1908年推导出另一种形式的动力学普遍方程,其所依据的原理称之为虚功率原理。
虚功率形式的动力学普遍方程为:四、高斯原理1829年,高斯(Gauss)提出动力学普遍方程的又一形式,称为高斯原理,其表达式为:§2-2 非完整系统动力学一、非完整系统动力学简介1894年,德国学者Henz第一次将约束系统分成“完整”和“非完整”两大类,从此开辟了非完整系统动力学(Nonholonomie System)的新领域,如今它已成为分析力学的一个重要分支。
(完整版)传染病动力学模型
课计算出EE的特征值,若根号里<0,则共轭复数根
当 时成立,由阻尼振荡可计算周期
真题:2003年SARS
传病动力学模型
常微分方程
仓室建模法:1.将研究群体分类:感染者,健康者;潜伏者,感染者/免疫者,易感者
2.将不同仓室用箭头加以连接(疾病传染规律)S->E->I->H;可再考虑出生、死亡、迁入
建立转移图
疾病类型:得病后免疫力:终身免疫:单向,不循环/暂时免疫,可循环
由病原体类型划分:病毒/细菌(能否循环)
评估控制策略
估计流行周期,预测爆发
1.估计基本再生数:
解析法
统计方法(简单直接)
下一代矩阵方法:1.将种群分类,广义感染者与广义易感者
2.改写广义感染者X的动力学方程:
3.计算无病平衡点DEF:
R0=
2.控制策略评估:
实施群体免疫:群体免疫覆盖率 ,R0要小一点
3.(1)存在周期解(2)发生环绕地方病平衡点的阻尼振荡
基本概念:
发生率:单位时间多少人被感染(双线性,标准型)
出生、死亡、额外(因病死亡率,输入,输出,隔离率,恢复率)
模型平衡点:无病平衡点DFE、地方病平衡点EE
经典SIR模型:
几个仓室几个变量,由转移图分别列常微分方程
基本再生数R0与阈值定理(现象):
R0<1:存在无病平衡点且局部稳定/全局渐进稳定,疾病最终绝灭
R0>1:DEF不稳定,存在地方病平衡点,全局渐进稳定,疾病最终流行
R0= ,
R0的意义:在全部是易感者群体中引入一个感染者,最终感染人数
降维:变量可选各仓室人数与总的比例
动力学模型建模与分析
KM-SIR模型
S
SI
I
I
R
dS SI,
dt
dI SI I ,
dt
dR I.
dt
这里 为恢复率.记
.
R0
S (0)
研究结果表明,当 R0 1 时,疾病流行;当 R0 1 时,疾病不会流
行. R0 1 是区分疾病流行与否的阈值.Kermack和Mckendrick的建
模思想对流行病模型的动力学研究方法上起了 基本的指导作用.此外
由于在人群中进行流行病的实验是不现实的,因此对流行病进行 理论分析就显得十分重要.流行病学数学模型(mathematical model)又称数学流行病学(mathematical epidemiology)和理论流 行病学(theoretical epidemiology),它使用数学公式明确地和定量 地表达病因、宿主和环境之间构成的疾病流行规律,同时从理论 上探讨不同防制措施的效应.
1760年,D.Bernoulli为了研究天花建立了有史以来第一个流行病模型。
D Bernoulli. Essai d‘une nouvelle analyse de la mortalite causee par la petiteve role et des avantages de l’inoculation pour al prevenir, in Memoires de Mathematiques et de physique. Paris: Academie Royale des Sciences, 1760, 145.
传染病动力学模型建模与分析
传染病动力学模型建模与分析
流行病历来就是危害人类健康的大敌,历史上流行病一次又一次 的流行给人类生存和国计民生带来了巨大的灾难。世界卫生组织 (WTO)发表的世界卫生报告表明,流行病依然是人类的第一杀 手。目前全球60亿人口中约有半数受到各种不同流行病的威胁。 以1995年为例,全世界死亡共5200万人,其中1700万人丧生于 各种流行病.
传染病的传播动力学建模与方法研究
传染病的传播动力学建模与方法研究传染病是由病原微生物(如细菌、病毒等)引起的一类疾病,它在人群中的传播十分迅速。
了解传染病的传播动力学是预防和控制传染病的关键。
传染病的传播动力学建模与方法研究通过数学模型和数据分析,帮助我们更好地理解传染病的传播规律和速度,为制定合理的防控策略提供科学依据。
一、传播动力学建模传播动力学建模是研究人群中传染病传播过程的可视化数学模型。
通过建立传播模型,我们可以模拟传染病在人群中的传播速度和传播范围。
常见的传播动力学模型有SI模型、SIR模型以及SEIR模型等。
SI模型中,人群被分为两个状态:易感者(Susceptible)和感染者(Infected)。
这个模型适用于传染病传播速度较慢和没有免疫力的情况。
SIR模型在SI模型的基础上增加了康复者(Recovered)状态,适用于传染病传播速度较快且感染后有免疫力的情况。
而SEIR模型在SIR模型的基础上增加了潜伏者(Exposed)状态,适用于传染病具有潜伏期的情况。
二、方法研究1. 数据收集与处理传播动力学研究的第一步是收集和处理相关数据。
通过收集人群流动和交往数据、病例数据和病原微生物特征等信息,可以获得传染病传播的基础数据。
同时,对这些数据进行统计学分析和建模处理,以便后续的传播动力学建模分析。
2. 参数估计与模型验证在传染病传播动力学建模中,参数估计是一个重要的环节。
通过利用已知的病例数据和实验结果,可以估计模型中的传染率、潜伏期、康复率等参数。
此外,为了验证建立的传播动力学模型是否准确,可以利用模型预测结果与实际数据进行比较,进一步调整和优化模型。
3. 预测与控制基于建立的传播动力学模型和参数估计结果,可以进行传染病的预测和控制策略制定。
通过对人群流动和交往网络的分析,可以预测传染病的传播路径和传播速度。
同时,结合疫苗、药物和健康宣传等措施,制定合理的传染病控制策略,以最大程度地减少传播风险。
结论传染病的传播动力学建模和方法研究为我们深入了解传染病传播规律和传播速度提供了有效的工具和方法。
matlab 动力学建模
MATLAB 动力学建模1. 引言动力学建模是一种描述物体运动和行为的数学建模方法。
在工程学和物理学中,动力学建模被广泛应用于设计、控制和优化系统。
MATLAB是一个强大的数值计算软件,可以用于动力学建模和仿真。
本文将介绍MATLAB在动力学建模中的应用。
2. 动力学建模基础动力学建模的基础是牛顿第二定律,即力等于质量乘以加速度。
根据这个定律,可以建立物体的运动方程。
在MATLAB中,可以使用符号计算工具箱来求解运动方程。
例如,考虑一个简单的弹簧振子系统,其中一个质量m通过一个弹簧与墙壁相连。
弹簧的劲度系数为k,质量m的加速度为a,弹簧的位移为x,墙壁的位置为0。
可以建立如下运动方程:m * a = -k * x在MATLAB中,可以使用符号计算工具箱来求解这个方程,并得到系统的运动方程。
3. 动力学建模方法在动力学建模中,有几种常用的方法可以用于建立系统的数学模型。
以下是一些常见的方法:3.1. 基于物理原理的建模基于物理原理的建模是一种常见的动力学建模方法。
这种方法基于系统的物理特性和力学原理,建立系统的数学模型。
例如,对于一个机械系统,可以根据质量、惯性、摩擦等物理特性,建立系统的动力学方程。
3.2. 系统辨识建模系统辨识建模是一种通过实验数据来建立系统模型的方法。
通过对系统进行实验观测,收集系统的输入和输出数据,然后使用系统辨识算法来估计系统的动力学模型。
MATLAB提供了多种系统辨识工具箱,可以用于建立系统的数学模型。
3.3. 仿真建模仿真建模是一种通过数值仿真来建立系统模型的方法。
通过使用数值计算方法和数学模型,可以模拟系统的运动和行为。
MATLAB提供了强大的仿真工具箱,可以用于建立系统的数学模型,并进行仿真研究。
4. MATLAB 动力学建模工具MATLAB提供了多种工具和函数,用于动力学建模和仿真。
以下是一些常用的工具和函数:4.1. 符号计算工具箱符号计算工具箱可以用于求解符号方程和符号运算。
动力学过程建模和仿真方法
动力学过程建模和仿真方法动力学过程建模和仿真方法是一种模拟和预测系统或过程动态行为的技术。
它涉及将系统的物理规律、过程参数、初始条件等纳入数学模型中,并通过模型求解和仿真来预测系统的状态演变和行为。
为了准确描述和分析系统的动态行为,动力学过程建模和仿真方法使用了多种数学和计算工具。
这些工具包括微分方程、差分方程、概率论、优化算法等。
在动力学过程建模中,首先需要确定系统的动力学行为。
这可以通过物理定律和实验数据来确定。
然后,根据动力学规律建立数学模型,包括参数和状态变量。
常用的模型类型包括连续模型和离散模型。
连续模型基于微分方程,描述系统在连续时间下的演化。
离散模型基于差分方程,描述系统在离散时间点上的演化。
根据具体问题的需要,可以选择合适的模型类型。
建立数学模型后,需要确定模型的参数。
这可以通过实验观测数据进行参数估计,或者根据物理规律和系统特性进行估算。
参数的准确确定对于模型的精度和预测能力至关重要。
在模型建立和参数确定之后,接下来是模型求解和仿真。
模型求解可以使用数值方法或符号计算方法。
数值方法将微分方程或差分方程转化为差分方程,然后通过计算机程序进行求解。
常用的数值方法有欧拉方法、龙格-库塔方法等。
符号计算方法则通过代数运算和符号推导来求解模型。
仿真是指利用数学模型和求解方法模拟系统的动态行为。
仿真可以通过改变模型的输入条件和参数来预测系统的响应。
动力学过程建模和仿真方法在许多领域都有广泛的应用。
在物理学和工程学中,它可以用来研究和设计机械系统、电路和流体系统等。
在经济学和管理学中,它可以用于模拟市场和经济系统的演化和波动。
在生物学和生态学中,它可以用来描述生物群落的竞争和演化过程。
在交通运输领域,它可以用来模拟和优化交通流量和路网设计。
尽管动力学过程建模和仿真方法具有广泛的应用前景,但也存在一些挑战和困难。
其中之一是模型的复杂性和计算量。
随着模型的复杂度增加,模型的求解和仿真会变得非常耗时。
(完整word版)系统动力学(自己总结)

系统动力学1.系统动力学的发展系统动力学(简称SD—system dynamics)的出现于1956年,创始人为美国麻省理工学院的福瑞斯特教授。
系统动力学是福瑞斯特教授于1958年为分析生产管理及库存管理等企业问题而提出的系统仿真方法,最初叫工业动态学。
是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题的交叉综合学科。
从系统方法论来说:系统动力学是结构的方法、功能的方法和历史的方法的统一。
它基于系统论,吸收了控制论、信息论的精髓,是一门综合自然科学和社会科学的横向学科。
系统动力学的发展过程大致可分为三个阶段:1)系统动力学的诞生—20世纪50-60年代由于SD这种方法早期研究对象是以企业为中心的工业系统,初名也就叫工业动力学。
这阶段主要是以福雷斯特教授在哈佛商业评论发表的《工业动力学》作为奠基之作,之后他又讲述了系统动力学的方法论和原理,系统产生动态行为的基本原理。
后来,以福雷斯特教授对城市的兴衰问题进行深入的研究,提出了城市模型。
2)系统动力学发展成熟—20世纪70-80这阶段主要的标准性成果是系统动力学世界模型与美国国家模型的研究成功。
这两个模型的研究成功地解决了困扰经济学界长波问题,因此吸引了世界范围内学者的关注,促进它在世界范围内的传播与发展,确立了在社会经济问题研究中的学科地位。
3)系统动力学广泛运用与传播—20世纪90年代-至今在这一阶段,SD在世界范围内得到广泛的传播,其应用范围更广泛,并且获得新的发展.系统动力学正加强与控制理论、系统科学、突变理论、耗散结构与分叉、结构稳定性分析、灵敏度分析、统计分析、参数估计、最优化技术应用、类属结构研究、专家系统等方面的联系。
许多学者纷纷采用系统动力学方法来研究各自的社会经济问题,涉及到经济、能源、交通、环境、生态、生物、医学、工业、城市等广泛的领域。
2.系统动力学的原理系统动力学是一门分析研究信息反馈系统的学科。
它是系统科学中的一个分支,是跨越自然科学和社会科学的横向学科。
机械系统的动力学建模与仿真

机械系统的动力学建模与仿真机械系统的动力学建模与仿真是一项重要的工程技术,它可以帮助我们深入理解机械系统的运动规律和性能特点,优化系统设计,提高工程效率。
本文将探讨机械系统动力学建模与仿真的方法和应用。
一、动力学建模的基本原理机械系统的动力学建模是通过分析系统的几何和物理特性,建立系统的方程来描述系统的运动规律和力学行为。
动力学建模的基本原理包括以下几个步骤:1. 定义系统:首先需要确定机械系统的边界和组成部分,明确主体和附属物之间的关系。
2. 描述物体的运动:通过建立物体的坐标系和选择适当的坐标变量,可以描述物体的位置、速度和加速度。
3. 列写动力学方程:根据牛顿定律和运动学关系,可以得到描述系统的动力学方程。
这些方程可以是线性的,也可以是非线性的。
4. 边界条件:在给定系统边界上的约束条件,对系统加入边界条件。
二、动力学建模的方法机械系统的动力学建模可以采用多种方法,常见的方法有以下几种:1. 深入分析法:通过详细分析机械系统的每个部分,推导出系统的运动学和动力学方程。
这种方法适用于简单的机械系统,但对于复杂的系统来说,分析会相当繁琐。
2. 力学模型法:利用已有的力学模型和理论,将机械系统转化为力学模型,建立系统的运动学和动力学方程。
这种方法适用于已有较为成熟的力学模型的情况。
3. 实验数据法:通过采集机械系统的实验数据,利用数据处理和分析方法建立系统的数学模型。
这种方法可以快速获取系统的运动规律,但对采集的数据质量有一定要求。
4. 计算机辅助法:借助计算机辅助工具,如MATLAB、Simulink等,通过数值仿真的方法建立系统的动力学模型。
这种方法可以快速、灵活地建立系统模型和进行仿真分析。
三、动力学仿真的应用机械系统的动力学仿真可以应用于各个领域,比如航天、汽车、机器人、机械加工等。
以下是动力学仿真的几个应用示例:1. 航天器姿态控制:通过建立航天器的动力学模型,仿真分析不同控制策略对航天器姿态的影响,优化控制算法,提高姿态控制的精度和鲁棒性。
多体系统动力学建模与仿真分析
多体系统动力学建模与仿真分析概述多体系统动力学建模与仿真分析是解决实际工程问题和科学研究中的重要技术手段。
本文将从理论介绍、实际应用和发展前景等几个方面,探讨多体系统动力学建模与仿真分析的相关内容。
一、多体系统动力学建模的理论基础多体系统动力学建模是研究多体系统运动规律的基础工作。
其理论基础主要包括牛顿运动定律、欧拉-拉格朗日动力学原理等。
1. 牛顿运动定律牛顿运动定律是多体系统动力学建模的基础。
根据牛顿第二定律,物体的加速度与作用在物体上的合外力成正比,与物体的质量成反比。
在多体系统中,通过对所有物体的运动状态和相互作用力进行分析,可以建立多体系统的动力学模型。
2. 欧拉-拉格朗日动力学原理欧拉-拉格朗日动力学原理是一种更为普适的多体系统动力学建模方法。
该理论通过定义系统的广义坐标和广义速度,以及系统的势能和拉格朗日函数,通过求解拉格朗日方程,得到系统的运动方程。
相比于牛顿运动定律,欧拉-拉格朗日动力学原理具有更广泛的适用性和更简洁的表达形式。
二、多体系统动力学建模的实际应用多体系统动力学建模在工程和科学领域中有着广泛的应用。
以下以机械系统和生物系统为例,简要介绍多体系统动力学建模的实际应用。
1. 机械系统在机械工程中,多体系统动力学建模是设计和优化机械系统的关键步骤。
以汽车悬挂系统为例,通过建立汽车车体、轮胎、悬挂弹簧和减震器等部件的动力学模型,可以分析车辆在不同工况下的悬挂性能,进而指导悬挂系统的设计和优化。
2. 生物系统在生物医学工程和生物力学研究中,多体系统动力学建模对于理解和模拟生物系统的运动特性具有重要意义。
例如,通过建立人体关节和肌肉的动力学模型,可以分析人体的运动机制,评估关节健康状况,提供康复治疗方案等。
三、多体系统动力学仿真分析的方法与技术多体系统动力学仿真分析是通过计算机模拟多体系统的运动过程,从而得到系统的运动学和动力学特性。
常用的方法与技术包括数值积分方法、刚体碰撞检测与处理、非线性约束求解等。
多刚体动力学建模方法
多刚体动力学建模方法
多刚体动力学建模的方法主要有以下两种:
1. 基于牛顿-欧拉法(Newton-Eulerformulation)的多刚体动力学建模方法:这种方法以递归方式建立模型,效率较高。
首先将多刚体系统的运动分解为分别基于牛顿方程和欧拉方程的平动和转动。
基于牛顿-欧拉方程的多
体动力学建模含有较多的理想约束力,有效消除理想约束力是该建模方法的关键。
为了消去完整约束系统动力学计算过程中的约束力,Schehlen等人
利用D’Alembert原理进行求解,而利用Jourdain原理能消去非完整多
刚体系统约束力。
2. 基于拉格朗日公式(Lagrange formulation)研究机械多体系统动力学
的建模方法:这种方法概念简单且系统,需要同时列写在基于拉格朗日列的多体系统运动方程和约束方程。
这种基于笛卡尔广义坐标的动力学方法得到系统的微分-代数方程,一般方程属于刚性的。
且对于该种建模原理,微分-代数方程的数值求解应用更广,如Chace等人应用Gear积分器编写了多体动力学计算软件Adams。
以上信息仅供参考,如需了解更多信息,建议查阅相关书籍或咨询专业人士。
(完整版)动力学建模方法与解法总结

目录1 刚体系统 (1)2 弹性系统动力学 (6)3 高速旋转体动力学 (10)1 刚体系统一般力学研究的对象,是由两个或两个以上刚体通过铰链等约束联系在一起的力学系统,为一般力学研究对象。
自行车、万向支架陀螺仪通常可看成多刚体系统。
人体在某种意义上也可简化为一个多刚体系统。
现代航天器、机器人、人体和仿生学中关于动物运动规律的研究都提出了多刚体系统的一系列理论模型作为研究对象。
多刚体系统按其内部联系的拓扑结构,分为树型和非树型(包含有闭链);按其同外界的联系情况,则有有根和无根之别。
利用图论的工具可以一般地分析多刚体系统的构造,建立系统的数学模型和动力学方程组。
也可从分析力学中的高斯原理出发,用求极值的优化算法直接求解系统的运动和铰链反力。
依照多刚体系统动力学的理论和方法,广泛采用电子计算机对这些模型进行研究,对于精确地掌握这些对象的运动规律是很有价值的。
1.1 自由物体的变分运动方程任意一个刚体构件i ,质量为i m ,对质心的极转动惯量为i J ',设作用于刚体的所有外力向质心简化后得到外力矢量i F 和力矩i n ,若定义刚体连体坐标系y o x '''的原点o '位于刚体质心,则可根据牛顿定理导出该刚体带质心坐标的变分运动方程:0][][=-'+-ii i i i i i T i n J F r m r φδφδ&&&& (1-1) 其中,i r 为固定于刚体质心的连体坐标系原点o '的代数矢量,i φ为连体坐标系相对于全局坐标系的转角,i r δ与i δφ分别为i r 与i φ的变分。
定义广义坐标:T i T i i r q ],[φ= (1-2)广义:T i T i i n F Q ],[= (1-3)及质量矩阵:),,(i i i i J m m diag M '= (1-4)体坐标系原点固定于刚体质心时用广义力表示的刚体变分运动方程:0)(=-i i i T i Q q M q &&δ (1-5)1.2 束多体系统的运动方程考虑由nb 个构件组成的机械系统,对每个构件运用式(1-5),组合后可得到系统的变分运动方程为:0][1=-∑=i i i nb i T i Q q M q&&δ (1-6)若组合所有构件的广义坐标矢量、质量矩阵及广义力矢量,构造系统的广义坐标矢量、质量矩阵及广义力矢量为:T T nb T T q q q q ],...,,[21= (1-7)),...,,(21nb M M M diag M = (1-8)T T nb T T Q Q Q Q ],...,,[21= (1-9)系统的变分运动方程则可紧凑地写为:0][=-Q q M q T &&δ (1-10)对于单个构件,运动方程中的广义力同时包含作用力和约束力,但在一个系统中,若只考虑理想运动副约束,根据牛顿第三定律,可知作用在系统所有构件上的约束力总虚功为零,若将作用于系统的广义外力表示为:T TA nb T A T A A Q Q Q Q ],...,,[21= (1-11) 其中:T A TA i A i n F Q ],[=,nb i ,...,2,1= (1-12) 则理想约束情况下的系统变分运动方程为:0][=-A T Q q M q &&δ (1-13)式中虚位移q δ与作用在系统上的约束是一致的。
动力学问题解题方法

动力学问题解题方法一. 正交分解法将矢量分解到直角坐标系的两个轴上,再进行合成,运用牛顿第二定律解答。
我们常见的是力的正交分解,但有些特殊情况下分解加速度更便于解题。
例1. 如图1—1所示,质量m kg =1的小球穿在斜杆上,斜杆与水平方向成θ=30°角,球与杆间的动摩擦因数为123,小球受到竖直向上的拉力F N =20,则小球沿杆上滑的加速度为多少?(g m s =102/)图1—1解析:小球受四个力的作用(如图1—2所示),沿杆的方向和垂直于杆的方向分别为x 、y 轴(如图1—2所示),将各力分解到x 、y 轴上。
图1—2x 方向:F mg F ma N sin sin θθμ--= y 方向:F mg F N cos cos θθ--=0解得a F mg mm s =--=()(sin cos )./θμθ252注意:正交分解时,直角坐标系选择哪两个方向,因题而异,但一般应选加速度a 所在的直线为一坐标轴方向。
例2. 如图2所示,倾斜索道与水平面夹角为37°,当载人车厢沿钢索匀加速向上运动时,车厢中的人对厢底的压力为其体重的1916倍(车厢底始终保持水平),则车厢对人的摩擦力是人体重的(sin .cos .37063708°;°==):( ) A.14倍; B.13倍; C. 54倍; D.43倍图2解析:将车厢的加速度a 沿水平方向和竖直方向分解,如图2—1所示,分析人受力如图2—2所示,重力mg 竖直向下,支持力F N 竖直向上,静摩擦力F f 水平向右,由牛顿第二定律得:F mg ma F ma F mg a a F mg A N y f xN x y f -=====()()()cot ()()()()()1219163374123414·°由联立解得:,答案正确。
二. 整体法和隔离法当我们所研究的问题是涉及多个物体组成的系统,系统中各物体的加速度相同时,可以把系统中的所有物体看成一个整体,用牛顿第二定律求加速度,这种思维方法叫整体法;为了研究问题方便,常把某个物体从系统中“隔离”出来,作为研究对象,分析受力情况,应用牛顿第二定律列出方程求出答案,这种思维方法叫做隔离法,整体法和隔离法在解决问题中是相辅相成的。
动力学题解题技巧

动力学题解题技巧动力学题是物理学中常见的一类题型,“动力学”指的是研究物体运动的规律和原因。
在解答动力学题时,我们需要根据题目提供的条件和要求,运用合适的公式和方法来求解。
本文将介绍一些常用的动力学题解题技巧,帮助读者更好地应对这类问题。
1. 划定系统边界在解答动力学问题时,首先要明确问题的范围和所涉及的物体。
通过划定系统边界,我们可以将需要分析的物体与外界区分开来,便于我们在计算时考虑到外力和内力之间的相互作用。
例如,当我们解答关于炮弹抛射问题时,可以将炮弹及其发射装置作为我们的系统,而空气阻力可以视为外力的一部分。
2. 将动力学问题转化为力学问题动力学问题多涉及物体的加速度、速度和位移等概念,而力学问题则更加关注物体之间的相互作用力。
在解答动力学问题时,我们可以将其转化为力学问题,通过分解和分析物体之间的相互作用力来求解。
例如,对于一个垂直下落的物体,我们可以将其转化为力学问题,将物体受到的重力和空气阻力进行分析,并运用牛顿第二定律来计算物体的加速度和速度。
3. 运用合适的公式和方程在解答动力学问题时,掌握常用的公式和方程是非常重要的。
例如,牛顿第二定律F=ma,可以用于计算物体的加速度;位移公式s=vt+1/2at^2,可以用于计算物体的位移等。
在选择公式和方程时,我们要根据题目中提供的信息,选择适用的公式进行计算。
同时,要注意单位的一致性和量纲的匹配,以确保计算结果的准确性。
4. 考虑限制条件和特殊情况在解答动力学问题时,我们要注意考虑限制条件和特殊情况对问题的影响。
限制条件如摩擦力、绳的拉力等,都会对物体的运动产生一定的影响,需在计算时予以考虑。
特殊情况如物体的运动轨迹变化、运动过程中的能量转化等,都需要我们观察并分析,运用相应的原理和定律来解释。
5. 多练习和思考解答动力学问题需要一定的经验和思考。
通过多做习题和实践,我们可以熟悉不同类型的动力学问题和解题思路,提高解题的效率和准确性。
物理学中的动力学方程解法

物理学中的动力学方程解法动力学方程是物理学研究中的重要内容,涉及到物质运动的规律与变化。
求解动力学方程是研究物理现象的关键,有多种解法,本文将从不同角度介绍动力学方程的求解方法。
拉格朗日方程法拉格朗日方程法是一种基于能量原理的方法,解决动力学方程问题时不涉及具体物理系统的结构和特征,只考虑给定系统的动力学特征。
一般来说,如果已知系统的拉格朗日函数,则可以通过拉格朗日方程求得系统的运动方程。
拉格朗日方程可以表示为:$$ \frac{d}{dt}\frac{\partial L}{\partial \dot x_i}-\frac{\partialL}{\partial x_i}=Q_i $$其中$L$是拉格朗日函数,$\dot x_i$是$x_i$的变化率,$Q_i$是广义力。
这个方程可以求解出系统的运动方程并且可以与多个粒子或者车体单元相关。
欧拉-拉格朗日方程法欧拉-拉格朗日方程法是一种基于欧拉方程的泛函分析方法,可以用于求解高阶动力学方程。
此方法将欧拉方程与拉格朗日方程相结合,将其转换为更一般和更简单的表达形式。
对于欧拉-拉格朗日方程,可以表示为:$$ \frac{\partial L}{\partial t}-\sum\frac{\partial}{\partialx_i}\frac{\partial L}{\partial (\partial x_i)}=\sum F_i^{\prime}\frac{\partial L}{\partial (\partial x_i)} $$其中,$L$是拉格朗日量,$t$表示时间,$x_i$是广义坐标,$\frac{\partial L}{\partial(\partial x_i)}$是拉格朗日函数中广义坐标的变化率,$F_i$是广义力。
哈密顿方程法哈密顿方程法是一种基于哈密顿函数的动力学方程求解方法,通过求解哈密顿函数的偏导数,可以得到物理系统的微分方程。
动力学建模——精选推荐

4.4 动力学建模动力学建模是一种新兴的修改类建模方式,它在建筑表现、角色塑造等方面都有着广泛的应用,现在,就让我们一同来感受一下她的独特魅力吧!4.4.1 自由的布料——衬布图4.41打开\场景模型\动力学建模\衬布场景.max:图4.42在顶视图中创建一平面物体,分段数要比较多,这样一来才能产生比较细腻的布纹:图4.43给这一平面物体添加一“Reactor Cloth”修改器,并勾选“避免自身交叉”选项,这样一来在布料运算时就不会有自身穿插的现象发生。
图4.44在没有失去对平面物体的选择情况下面,点击动力学工具面板中的,这样一来,平面物体就被添加进了布料集合当中了,也就是说,平面物体就具有了布料的一些特性。
布料集合的图标可以随便移动到一个不影响操作的地方。
在布料集合的修改命令面板中我们可以看到平面物体已经被添加进来了:图4.45接着再选择除平面物体之外的其他两样物体:墙体、画框和茶壶。
再点击动力学面板中的,把这三样物体添加进钢体集合:图4.46选择墙体和画框物体,再点击动力学面板中的,把墙体物体的动力学属性由“Mesh Convex Hull”改为“Concave Mesh”,也就是由凸面体改为凹面体(知识点DVD):图4.47进入“工具”面板,点击Reactor,并点击在窗口中预览,打开了动力学预览:图4.48按“P”键,开始进行动力学运算,在运算时可以通过按住右键拖动的方式拖动布料,左键可以旋转观察,当得到一个比较满意的结果之后,再按下“P”键结束运算:图4.49把模型更新到MAX:图4.50关闭动力学窗口,就得到了一个动力学的布料物体,注意,这时候平面物体依然没有厚度,要想得到有厚度的布料,可以给平面物体添加一“壳”修改器,外部量尽可能小点:图4.514.4.2 局部固定——毛巾图4.52在前视图中创建一如下图的平面物体,注意分段数,尽可能地使平面的分段成正四方形:图4.53添加一“细化”修改器,设置跌代次数为2,使得平面有更加多的细节:图4.54添加一“Reactor Cloth”修改器,并勾选“避免自身交叉”选项。
动力学方程求解解析或数值方法求解动力学方程
动力学方程求解解析或数值方法求解动力学方程动力学方程是描述物体在运动过程中受到的力和力的作用所引起的变化的方程。
在物理学和工程学等领域中,解析方法和数值方法被广泛应用于求解动力学方程。
本文将探讨这两种方法的原理和应用。
一、解析方法解析方法是通过对动力学方程进行变量分离、积分和代换等数学运算,最终求得解析解的方法。
这种方法的优点在于可以得到精确的解析解,对于简单的动力学方程尤其适用。
以简谐振动为例,其动力学方程可以表示为:m(d^2x/dt^2) + kx = 0其中,m为质量,k为弹性系数,x为位移。
通过假设解为x = Asin(ωt + φ),将其代入方程中,可以得到解析解为x = A sin(ωt + φ),其中A为振幅,ω为角频率,φ为初相位。
解析方法的局限性在于,复杂的动力学方程往往难以通过变量分离和代换得到解析解。
此外,即使能够得到解析解,解析解在某些情况下可能无法给出具体数值,或者需要进行复杂的数学运算。
这时就需要借助数值方法来求解动力学方程。
二、数值方法数值方法通过将动力学方程转化为一组离散的代数方程,并利用数值计算的方法来逼近解析解。
数值方法的优点在于适用于各种复杂的动力学方程,并能够给出数值上的近似解。
最常用的数值方法之一是欧拉方法。
该方法通过将时间t划分为一系列小时间步Δt,用近似导数来代替原方程中的导数,得到递推式:x(t+Δt) ≈ x(t) + Δt * (dx/dt)其中,Δt表示时间步长,dx/dt表示在t时刻的速度。
欧拉方法的缺点在于其逼近精度较低,误差随着时间步长Δt的增加而增大。
为了提高精度,可以采用更高阶的数值方法,如改进欧拉法、龙格-库塔法等。
此外,还有一些基于插值或拟合的数值方法,如有限元法、有限差分法和谱方法等。
这些方法根据具体问题的特点选择合适的数值格式和离散方法,能够更准确地求解动力学方程。
总结:动力学方程求解可以通过解析方法和数值方法来实现。
解析方法适用于简单的动力学方程,可以得到精确的解析解;而数值方法适用于各种复杂的动力学方程,通过逼近解析解来求得数值解。
机械运动学与动力学建模方法研究

机械运动学与动力学建模方法研究机械运动学与动力学建模是研究机械系统运动规律和力学性质的重要领域。
它在工程设计、机器人控制、运动仿真等方面有着广泛应用。
本文将探讨机械运动学与动力学建模的基本原理和方法,并着重介绍几种常见的建模方法。
一、机械运动学建模机械运动学建模是研究机械系统运动规律的过程。
它主要关注机器结构的几何特性以及运动副的约束关系。
通过运动副的分析和建模,可以得到机械系统的位置、速度和加速度等运动参数。
1.1 动力学约束分析在进行机械运动学建模之前,首先需要对系统的动力学约束进行分析。
动力学约束包括构型约束和运动约束两类。
构型约束是由机器结构的几何特性所确定的,例如连接杆件的长度、机械臂的关节角度等。
运动约束则是由运动副的特性所决定的,例如滚动接触、刚性约束等。
1.2 坐标系和运动变量选择建立机械系统的坐标系是进行运动学分析的基础。
根据机械系统的结构和需要分析的问题,选择合适的坐标系是非常重要的。
通常可以选择全局坐标系和局部坐标系两种。
全局坐标系是机械系统的绝对坐标系,而局部坐标系是相对于某个机构件的坐标系。
运动变量是描述机械系统运动状态的参数,常用的运动变量包括位置、速度和加速度。
可以根据系统的运动约束和需要分析的问题选择适当的运动变量进行建模。
1.3 运动链与运动副模型运动链是由多个连续的机构件组成的一条机械链,它们通过运动副连接在一起。
建立运动链模型可以描述机械系统的结构和运动特性。
通常使用约束方程来描述运动链的运动关系。
运动副是实现机械件之间相对运动的装置。
常见的运动副包括旋转副、平动副、滚动副等。
根据运动副的类型和特性,可以建立相应的运动副模型。
例如,对于旋转副,可使用角度变量来描述其运动状态;对于平动副,则使用位移变量。
二、机械动力学建模机械动力学建模是研究机械系统力学性质的过程。
它主要关注机械系统的力学特性,包括质量、力、力矩等。
通过建立动力学模型,可以研究系统的平衡、稳定性以及运动过程中的力学行为。
多体动力学的理论模型与数值求解

多体动力学的理论模型与数值求解多体动力学是研究多个物体之间相互作用和运动规律的学科。
它在物理学、力学、天体物理学等领域中有着广泛的应用。
为了描述和预测多体系统的行为,科学家们发展了各种理论模型和数值求解方法。
在多体动力学中,最常用的理论模型之一是牛顿力学。
根据牛顿第二定律,物体的运动状态由其所受的合外力决定。
在多体系统中,每个物体都受到其他物体的引力或斥力作用。
通过求解牛顿的运动方程,可以得到物体在时间上的演化规律。
然而,对于复杂的多体系统,牛顿力学的求解并不容易。
当物体数量较大时,运动方程的求解变得复杂且耗时。
为了克服这个问题,科学家们提出了各种数值求解方法。
一种常用的数值求解方法是基于离散化的方法,如欧拉法和龙格-库塔法。
这些方法将时间和空间分割成小的离散单元,通过迭代计算来逼近物体的运动轨迹。
虽然这些方法相对简单,但对于某些问题可能会出现数值不稳定性和精度不够的情况。
为了提高数值求解的精度和效率,科学家们还开发了一些更高级的方法,如基于粒子的方法和基于网格的方法。
基于粒子的方法将物体看作离散的质点,通过求解质点之间的相互作用来模拟多体系统的运动。
而基于网格的方法则将空间分割成网格,通过求解网格上的方程来模拟物体的运动。
这些方法在模拟复杂多体系统时具有较高的精度和效率。
除了数值求解方法,科学家们还在多体动力学中引入了一些其他的理论模型。
例如,分子动力学模型用于研究原子和分子之间的相互作用和运动规律。
这个模型基于牛顿力学和统计力学的原理,通过求解粒子之间的相互作用来模拟物质的宏观行为。
分子动力学模型在化学、材料科学等领域中有着广泛的应用。
另一个重要的理论模型是天体动力学模型。
天体动力学研究天体之间的引力相互作用和运动规律。
根据牛顿的引力定律,科学家们可以预测行星、恒星和星系等天体的运动轨迹。
天体动力学模型在天文学中有着重要的地位,帮助科学家们理解宇宙的起源和演化。
总之,多体动力学的理论模型和数值求解方法在科学研究和工程应用中起着重要的作用。
(完整版)动力学建模方法与解法总结
目录1 刚体系统 (1)2 弹性系统动力学 (6)3 高速旋转体动力学 (10)1 刚体系统一般力学研究的对象,是由两个或两个以上刚体通过铰链等约束联系在一起的力学系统,为一般力学研究对象。
自行车、万向支架陀螺仪通常可看成多刚体系统。
人体在某种意义上也可简化为一个多刚体系统。
现代航天器、机器人、人体和仿生学中关于动物运动规律的研究都提出了多刚体系统的一系列理论模型作为研究对象。
多刚体系统按其内部联系的拓扑结构,分为树型和非树型(包含有闭链);按其同外界的联系情况,则有有根和无根之别。
利用图论的工具可以一般地分析多刚体系统的构造,建立系统的数学模型和动力学方程组。
也可从分析力学中的高斯原理出发,用求极值的优化算法直接求解系统的运动和铰链反力。
依照多刚体系统动力学的理论和方法,广泛采用电子计算机对这些模型进行研究,对于精确地掌握这些对象的运动规律是很有价值的。
1.1 自由物体的变分运动方程任意一个刚体构件i ,质量为i m ,对质心的极转动惯量为i J ',设作用于刚体的所有外力向质心简化后得到外力矢量i F 和力矩i n ,若定义刚体连体坐标系y o x '''的原点o '位于刚体质心,则可根据牛顿定理导出该刚体带质心坐标的变分运动方程:0][][=-'+-ii i i i i i T i n J F r m r φδφδ&&&& (1-1) 其中,i r 为固定于刚体质心的连体坐标系原点o '的代数矢量,i φ为连体坐标系相对于全局坐标系的转角,i r δ与i δφ分别为i r 与i φ的变分。
定义广义坐标:T i T i i r q ],[φ= (1-2)广义:T i T i i n F Q ],[= (1-3)及质量矩阵:),,(i i i i J m m diag M '= (1-4)体坐标系原点固定于刚体质心时用广义力表示的刚体变分运动方程:0)(=-i i i T i Q q M q &&δ (1-5)1.2 束多体系统的运动方程考虑由nb 个构件组成的机械系统,对每个构件运用式(1-5),组合后可得到系统的变分运动方程为:0][1=-∑=i i i nb i T i Q q M q&&δ (1-6)若组合所有构件的广义坐标矢量、质量矩阵及广义力矢量,构造系统的广义坐标矢量、质量矩阵及广义力矢量为:T T nb T T q q q q ],...,,[21= (1-7)),...,,(21nb M M M diag M = (1-8)T T nb T T Q Q Q Q ],...,,[21= (1-9)系统的变分运动方程则可紧凑地写为:0][=-Q q M q T &&δ (1-10)对于单个构件,运动方程中的广义力同时包含作用力和约束力,但在一个系统中,若只考虑理想运动副约束,根据牛顿第三定律,可知作用在系统所有构件上的约束力总虚功为零,若将作用于系统的广义外力表示为:T TA nb T A T A A Q Q Q Q ],...,,[21= (1-11) 其中:T A TA i A i n F Q ],[=,nb i ,...,2,1= (1-12) 则理想约束情况下的系统变分运动方程为:0][=-A T Q q M q &&δ (1-13)式中虚位移q δ与作用在系统上的约束是一致的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1 刚体系统 (1)2 弹性系统动力学 (6)3 高速旋转体动力学 (10)1 刚体系统一般力学研究的对象,是由两个或两个以上刚体通过铰链等约束联系在一起的力学系统,为一般力学研究对象。
自行车、万向支架陀螺仪通常可看成多刚体系统。
人体在某种意义上也可简化为一个多刚体系统。
现代航天器、机器人、人体和仿生学中关于动物运动规律的研究都提出了多刚体系统的一系列理论模型作为研究对象。
多刚体系统按其内部联系的拓扑结构,分为树型和非树型(包含有闭链);按其同外界的联系情况,则有有根和无根之别。
利用图论的工具可以一般地分析多刚体系统的构造,建立系统的数学模型和动力学方程组。
也可从分析力学中的高斯原理出发,用求极值的优化算法直接求解系统的运动和铰链反力。
依照多刚体系统动力学的理论和方法,广泛采用电子计算机对这些模型进行研究,对于精确地掌握这些对象的运动规律是很有价值的。
1.1 自由物体的变分运动方程任意一个刚体构件i ,质量为i m ,对质心的极转动惯量为i J ',设作用于刚体的所有外力向质心简化后得到外力矢量i F 和力矩i n ,若定义刚体连体坐标系y o x '''的原点o '位于刚体质心,则可根据牛顿定理导出该刚体带质心坐标的变分运动方程:0][][=-'+-ii i i i i i T i n J F r m r φδφδ&&&& (1-1) 其中,i r 为固定于刚体质心的连体坐标系原点o '的代数矢量,i φ为连体坐标系相对于全局坐标系的转角,i r δ与i δφ分别为i r 与i φ的变分。
定义广义坐标:T i T i i r q ],[φ= (1-2)广义:T i T i i n F Q ],[= (1-3)及质量矩阵:),,(i i i i J m m diag M '= (1-4)体坐标系原点固定于刚体质心时用广义力表示的刚体变分运动方程:0)(=-i i i T i Q q M q &&δ (1-5)1.2 束多体系统的运动方程考虑由nb 个构件组成的机械系统,对每个构件运用式(1-5),组合后可得到系统的变分运动方程为:0][1=-∑=i i i nb i T i Q q M q&&δ (1-6)若组合所有构件的广义坐标矢量、质量矩阵及广义力矢量,构造系统的广义坐标矢量、质量矩阵及广义力矢量为:T T nb T T q q q q ],...,,[21= (1-7)),...,,(21nb M M M diag M = (1-8)T T nb T T Q Q Q Q ],...,,[21= (1-9)系统的变分运动方程则可紧凑地写为:0][=-Q q M q T &&δ (1-10)对于单个构件,运动方程中的广义力同时包含作用力和约束力,但在一个系统中,若只考虑理想运动副约束,根据牛顿第三定律,可知作用在系统所有构件上的约束力总虚功为零,若将作用于系统的广义外力表示为:T TA nb T A T A A Q Q Q Q ],...,,[21= (1-11) 其中:T A TA i A i n F Q ],[=,nb i ,...,2,1= (1-12) 则理想约束情况下的系统变分运动方程为:0][=-A T Q q M q &&δ (1-13)式中虚位移q δ与作用在系统上的约束是一致的。
系统运动学约束和驱动约束的组合如式(1-10),为:0),(=Φt q (1-14)对其微分得到其变分形式为:0=Φq q δ (1-15)式(1-13)和(1-15)组成受约束的机械系统的变分运动方程。
为导出约束机械系统变分运动方程易于应用的形式,运用拉格朗日乘子定理对式(1-13)和(1-15)进行处理。
拉格朗日乘子定理:设矢量n R b ∈,矢量n R x ∈,矩阵n m R A ⨯∈为常数矩阵,如果有:0=x b T (1-16)对于所有满足式(1-84)的x 条件都成立。
0=Ax (1-17)则存在满足式(1-85)的拉格朗日乘子矢量m R ∈λ。
0=+Ax x b T T λ (1-18)其中x 为任意的。
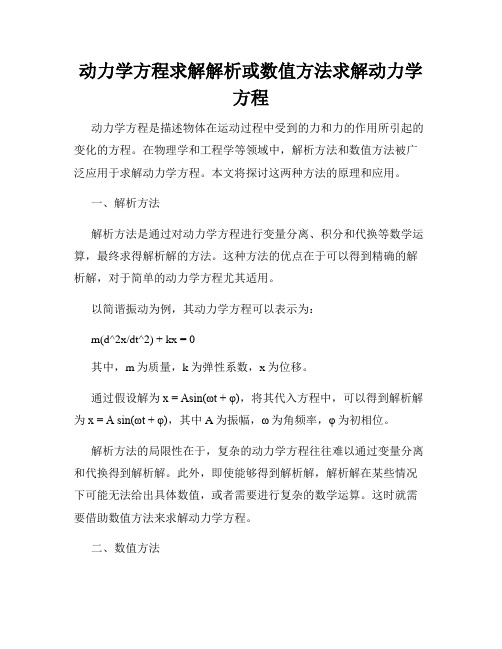
在式(1-13)和(1-15)中,n R q ∈,n n R M ⨯∈,n A R Q ∈,n m q R ⨯∈Φ,运用拉格朗日乘子定理于式(1-13)和(1-15),则存在拉格朗日乘子矢量m R ∈λ,对于任意的q δ应满足:0][][=-Φ+=Φ+-q Q q M q q Q q M T A Tq q T T A δλδλδ&&&& (1-19)由此得到运动方程的拉格朗日乘子形式:A T qQ q M =Φ+λ&& (1-20) 式(1-20)还必须满足式(1-10)、(1-12)和(1-14)表示的位置约束方程、速度约束方程及加速度约束方程,如下:0),(=Φt q (1-21)0),(),,(=-Φ=Φυq t q t q q q &&&,),(t q t Φ-=υ (1-22)0),,(),(),,,(=-Φ=Φt q q q t q t q q q q &&&&&&&&η,tt qt q q q q qΦ-Φ-Φ-=&&&2)(η (1-23) 以上三式其维数同式(1-14)。
式(1-20)、(1-21)、(1-22)和(1-23)组成约束机械系统的完整的运动方程。
将式(1-20)与(1-23)联立表示为矩阵形式:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡ΦΦηλA q T q Q q M &&0 (1-24) 式(1-24)即为多体系统动力学中最重要的动力学运动方程,式(1-24)还必须满足式(1-22)和(1-23)。
它是一个微分——代数方程组,不同于单纯的常微分方程组问题,其求解关键在于避免积分过程中的违约现象,此外,还要注意DAE 问题的刚性问题。
如果系统质量矩阵是正定的,并且约束独立,那么运动方程就有唯一解。
实际中的系统质量矩阵通常是正定的,只要保证约束是独立的,运动方程就会有解。
在实际数值迭代求解过程中,需要给定初始条件,包括位置初始条件)(0t q 和速度初始条件)(0t q &。
此时,如果要使运动方程有解,还需要满足初值相容条件,也就是要使位置初始条件满足位置约束方程,速度初始条件满足速度约束方程。
对于由式(1-24)及(1-21)、(1-22)确定的系统动力学方程,初值相容条件为:0)),((00=Φt t q (1-25)0)),(()()),(()),(),((00000000=-Φ=Φt t q t q t t q t t q t q q υ&&& (1-26)1.3 正向动力学分析、逆向动力学分析与静平衡分析对于一个确定的约束多体系统,其动力学分析不同于运动学分析,并不需要系统约束方程的维数m 等于系统广义坐标的维数n ,n m <。
在给定外力的作用下,从初始的位置和速度,求解满足位置约束式(1-22)及速度约束式(1-23)的运动方程式(1-24),就可得到系统的加速度和相应的速度、位置响应,以及代表约束反力的拉格朗日乘子,这种已知外力求运动及约束反力的动力学分析,称为正向动力学分析。
如果约束多体系统约束方程的维数m 与系统广义坐标的维数n 相等,n m =,也就是对系统施加与系统自由度相等的驱动约束,那么该系统在运动学上就被完全确定,由2.2.3节的约束方程、速度方程和加速度方程可求解系统运动。
在此情况下,雅可比矩阵是非奇异方阵,即:0),(≠Φt q q (1-27)展开式(1-24)的运动方程,为:A T qQ q M =Φ+λ&& (1-28) η=Φq q && (1-29)由式(1-29)可解得q &&,再由式(1-28)可求得λ,拉格朗日乘子λ就唯一地确定了作用在系统上的约束力和力矩(主要存在于运动副中)。
这种由确定的运动求系统约束反力的动力学分析就是逆向动力学分析。
如果一个系统在外力作用下保持静止状态,也就是说,如果:0==qq &&& (1-30) 那么,就说该系统处于平衡状态。
将式(1-30)代入运动方程式(1-20),得到平衡方程:A Tq Q =Φλ (1-31)由平衡方程式(1-21)及约束方程式(1-13)可求出状态q 和拉格朗日乘子λ。
这种求系统的平衡状态及在平衡状态下的约束反力的动力学分析称为(静)平衡分析。
1.4 约束反力对于约束机械系统中的构件i ,设其与系统中某构件j 存在运动学约束或驱动约束,约束编号为k 。
除连体坐标系y o x '''外,再在构件i 上以某点P 为原点建立一个新的固定于构件上的坐标系y P x '''',称为运动副坐标系,设从坐标系y P x ''''到坐标系y o x '''的变换矩阵为i C ,从坐标系y o x '''到坐标系xoy 的变换矩阵为i A ,则可导出由约束k 产生的反作用力和力矩分别为:k Tkr T i T i k i i A C F λΦ-='' (1-32) k T k T k r T i T P i k i i i B s T λφ)(Φ-Φ'='' (1-33) 以上两式中,k λ为约束k 对应的拉格朗日乘子,反作用力k i F ''和力矩ki T ''均为运动副坐标系y P x ''''中的量。
2 弹性系统动力学由于工业机器人、机械手、弹性联动装置、带柔性附件人造卫星、直升飞机的旋翼等工程结构发展的需求, 使运动中的弹性结构的动力学分析得到了很大的进展。
运动弹性体的动力学分析属于多体系统动力学的范畴。
而导出其有限元格式的动力学方程并研究其数值解法则是计算多体系统动力学的任务。
由于弹性变形与刚体运动的耦合导致了运动弹性体的动力学方程为时变的或非线性的,因此运动中的弹性体会出现诸多非线性效应。
运动中弹性体的动力分析问题可分为两类, 其一是具有给定刚体运动的弹性体的动力分析,这类问题仅讨论弹性体的刚体运动对其弹性变形的影响,比如机械手的弹性终端杆的振动分析一般可归于此类。