富士 伺服接线图与初始化
PLC控制富士变频器多段调速、正反转、连续运行电路图(七按钮)

L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
12 11 Y3 X3 X2 X1
E03=2 E02=1 E01=0 U 30A
高速
X5 X4 X3 X2 X1 COM
Y2 Y1 Y0 COM
C05多段频率1=10Hz C06多段频率2=20Hz C08多段频率4=40Hz
30C
中速
低速 变频器 停止输出 变频器 运行输出
10 11 12 13 14 15 16 17 0 1 2 3 4 5 6 7 20 21 22 23 24 25 26 27
MELSEG
RUN 运行 Y0 停止 STOP Y2
FX2N-48MR
OUT
10 11 12 13 14 15 16Fra bibliotek17Y4
Y6
Y10
Y12
Y14
Y16
Y20
Y22
Y24
Y26
U11 V11 W11 N11
L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
Y3 Y2 Y1 Y0
变频器 停止输出 变频器 运行输出
11 X3 X2 X1 E03=2 E02=1 E01=0 U CM
F07=1s F08=1s C05多段频率1=10Hz C06多段频率2=20Hz C08多段频率4=30Hz
U11 V11 W11 N11
L1 L2 L3 N
S9分励脱扣器
FX2N-48MR
12 11 Y3 X3 X2 X1
E03=2 E02=1 E01=0 U 30A
多段频率3
X5 X4 X3 X2 X1 COM
Y2 Y1 Y0 COM
C05多段频率1=5Hz C06多段频率2=10Hz C07多段频率3=15Hz C08多段频率4=20Hz C09多段频率5=25Hz C10多段频率6=30Hz C11多段频率7=35Hz
富士 伺服接线图与初始化

FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)驱动器侧CN2 电机侧插头P5 1 7 P5M5 2 8 M5+SIG 5 4 +SIG-SIG 6 5 -SIG外壳 3 FG二、动力线的接线驱动器侧电机侧插头U 1 1 UV 2 2 VW 3 3 W地 4 地三、相关参数设置注:设置好参数请重新上电。
四、操作说明线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF1.按MODE/ESC键多次直到面板上显示:PA012.按ENT 键1秒以上,面板显示:P1.013.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
最新富士伺服驱动器参数设定及基本操作。word版本
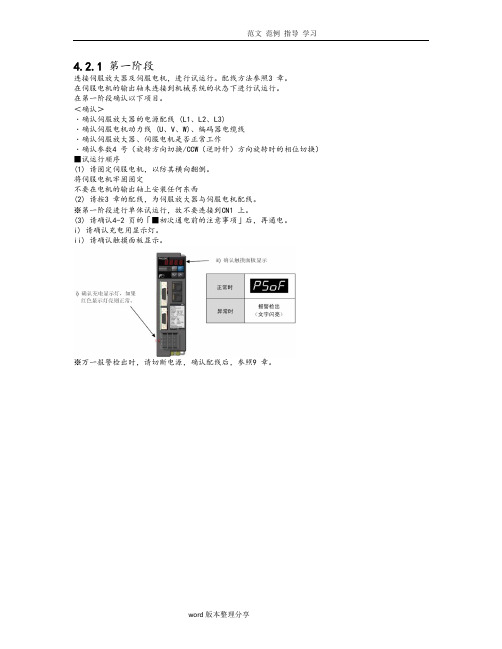
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
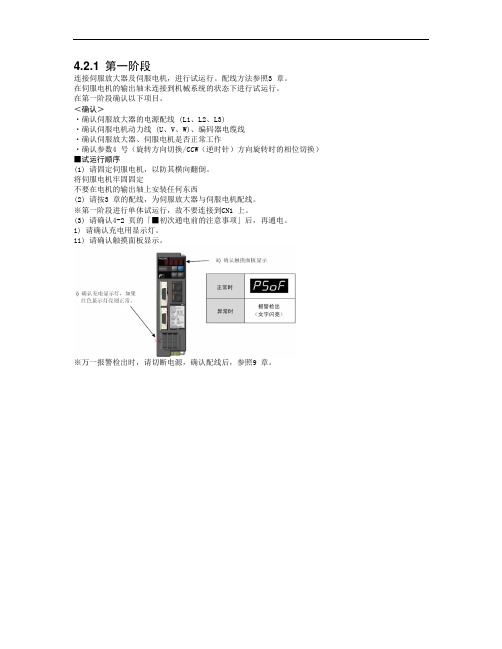
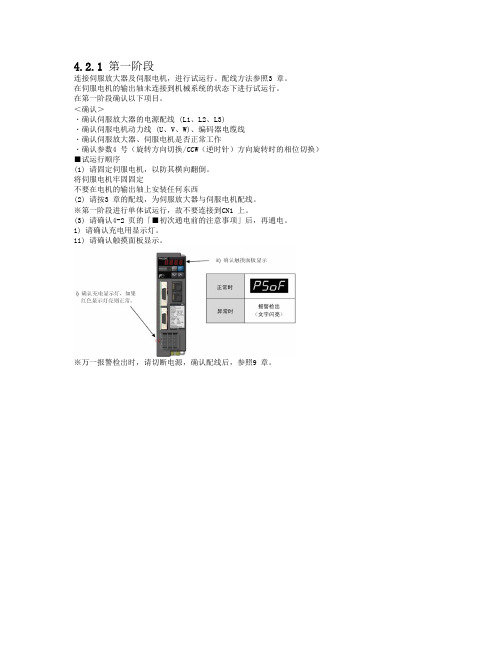
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
数控系统伺服驱动器接线及参数设定

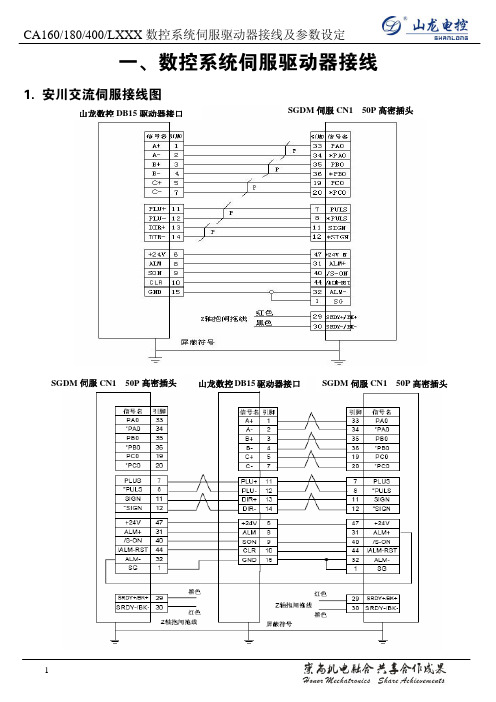
一、数控系统伺服驱动器接线1.安川交流伺服接线图山龙数控DB15驱动器接口SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头SGDM伺服CN1 50P高密插头山龙数控DB15驱动器接口2.松下交流伺服接线图山龙数控DB15驱动器接口松下Minas A4/A5伺服 50P高密插头3.三菱 MR-E型伺服接线图山龙数控DB15驱动器接口三菱MR-E-A (26P高密)4. 台达ASD-A 型伺服接线图山龙数控DB15驱动器接口台达ASDA-A系列伺服器50P高密插头5. 台达ASDA-B 型伺服接线图A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDOA /OA OB /OB 10231211242512345671112131415OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型DB25(两排针孔)山龙数控DB15驱动器接口1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)6. 台达ASDA-B 型伺服接线图(双驱动器接线)DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GND OA /OA OB /OB 10231211242512345671112131415DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST ALM CLR 810SON 917DI1+SON 台达ASDA-B型山龙数控OA /OA OB /OB 102312112425DB25(两排针孔)OZ /OZ 2221PLUSE /PLUSE 2019SIGN /SIGN 413COM+COM-双绞线118D03 ALM DI2 ARST 17DI1+SON台达ASDA-B型1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)1613DO1+COM-Z轴抱闸拖线(红)Z轴抱闸拖线(黑)7. 富士伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V Z-PU+PU-DR-DR+GNDFFA *FFA FFB *FFB 9101112232412345671112131415富士FALDIC-β伺服(26P高密插头)FFZ *FFZ 78CA *CA 2021CB *CB 114P24M24双绞线153OUT1CON2 RST ALM CLR 810SON 92CON1 RUN8.日立伺服接线图山龙数控DB15驱动器接口日立ADA系列伺服驱动器山龙数控DB15驱动器接口三洋PY系列DB50高密插头10. 三洋 R 系列伺服接线图山龙数控DB15驱动器接口三洋R系列DB50高密插头11. 开通 KT270系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND LA LAR LB LBR 7168172526123456789101112131415开通KT270系列伺服驱动器LZ LZR 1512ALM RES 111PP PG 1019NP NG 2023COMO COM12SON双绞线12. 四通(现更名为森创)GS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND A信号差分输出+A信号差分输出-B信号差分输出+B信号差分输出-333435363132123456789101112131415四通GS系列伺服DB44针Z信号差分输出+Z信号差分输出-228故障信号输出+报警清除信号输入1227脉冲指令信号输入+脉冲指令信号输入-1328方向/脉冲指令信号输入+方向/脉冲指令信号输入-76输入公共端COM 故障信号输出-23伺服使能(伺服ON)输入21BRAKE+Z轴抱闸拖线(红)5BRAKE-Z轴抱闸拖线(黑)双绞线13. 东元 TSDA 系列伺服接线图山龙数控DB15驱动器接口东元TSDA系列伺服器50P高密插头山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SON CLRPU+PU-DR-DR+GND PA /PA PB /PB 161718192021123456789101112131415东元ESDA系列伺服DB25插头(双排)PC /PC 14ALM 45PP /PN 67DP /DN 1022+24V N241SON 双绞线CLR 2FG2515. 松下J 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND OA+OA-OB+OB-131415161718123456789101112131415松下J系列伺服驱动器26P高密插头OC+OC-83ALM A-CLR 2021PULS1PULS22223SIGN1SIGN2111COM+COM-2SRV-ON 10BRK-OFFZ轴抱闸拖线双绞线山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 333435361920123456789101112131415东菱EPS-B1系列伺服驱动器50P高密插头PZO /PZO 3145ALM A-CLR 1617PULS+PULS-2324SIGN+SIGN-471,2,32COM+GND 40SRV-ON 25BK+Z轴抱闸拖线(红)26BK-Z轴抱闸拖线(黑)双绞线17. 东菱EPS-TA 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO /PAO PBO /PBO 171815161413123456789101112131415东菱EPS-TA系列伺服驱动器DB-36P插头PZO /PZO 521ALM A-CLR 910PULS+PULS-1112SIGN+SIGN+2225COM+GND 24S-ON 7BRK-OFFZ轴抱闸拖线双绞线18. 信捷DS2-AS 系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND AO+AO-BO+BO-6710589123456789101112131415信捷DS2-AS系列伺服驱动器VGA-15P插头ZO+ZO-138ALM A-CLR 21P+5V P-54D+5V D-1114+24VIN COM 7/S-ON双绞线19. 欧瑞传动SD10系列伺服接线图山龙数控DB15驱动器接口A+A-B+B-Z++24V ALM Z-SONCLR PU+PU-DR-DR+GND PAO+PAO-PBO+PBO-181716153231123456789101112131415欧瑞传动SD10系列伺服器50P高密插头PZO+PZO-209ALM AL-RST 4443P+5V P-4039D+5V D-419,49GP COM 5/SONI双绞线二、伺服驱动器参数设定1.安川Σ-Ⅱ系列伺服参数设定用安川伺服驱动器,设定以下参数后,机床即可工作。
富士伺服驱动器参数设定及基本操作

4.2.1第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>?确认伺服放大器的电源配线(L1、L2、L3)?确认伺服电机动力线(U、V、W)、编码器电缆线?确认伺服放大器、伺服电机是否正常工作?确认参数4号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1)请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2)请按3章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1上。
(3)请确认4-2页的「■初次通电前的注意事项」后,再通电。
i)请确认充电用显示灯。
ii)请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9章。
请预习说明书的第4章和第8章。
5参数5.1参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM(EEPROM)中,因此,即使切断电源也不会丢失。
作为参数一览表的"变更"项目的"电源"的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7段文字显示>灯灭。
)5.1.1利用触摸面板编集的方法5-25.2参数一览表5.3参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19号的设定值,电机轴正转时,输出B相进给90°相位差2路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子[CA]、[*CA]、[CB]、[*CB]的脉冲串的形式。
最大输入频率在差动输入时为1.0[MHz],在集电极开路输入时为200[kHz]。
数控系统伺服驱动器接线及参数设定
7
BRK-OFF
-9-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
2伺服控制器的初始化设置
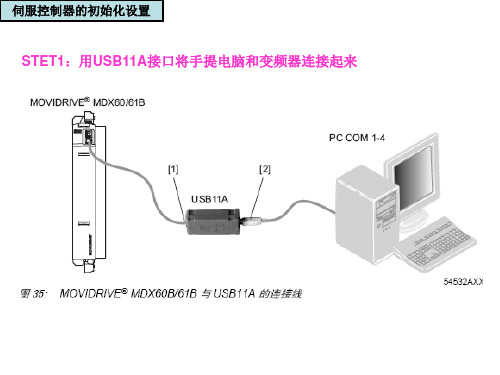
STET1:用USB11A接口将手提电脑和变频器连接起来 : 接口将手提电脑和变频器连接起来
伺服控制器的初始化设置
STET2:打开MOVITOOLS软件,设置相应的通讯参数 :打开 软件, 软件
语言选择英文 接口选择USB 接口选择 选择点对点连接
选择通讯速度 选择变频器型号
STET4:在参数界面中,点击“Startup”按钮,进入初始化界面, :在参数界面中,点击“ 按钮, 按钮 进入初始化界面, 点击“ 点击“Startup-Set1”
“Startup”按钮 按钮
伺服控制器的初始化设置
STET5:选择进行完全的初始化,点击“下一步” :选择进行完全的初始化,点击“下一步”
伺服控制器的初始化设置
STET9:根据实际需要,选择控制模式 :根据实际需要,
伺服控制器的初始化设置
STET10:设置系统的稳定度,负载转动惯量等参数 :设置系统的稳定度,
伺服控制器的初始化设置
STET11:监控设置和限制值设置,可以点击“Apply proposal”按钮使用 :监控设置和限制值设置,可以点击“ 按钮使用 系统推荐值
伺服控制器的初始化设置
STET3:点击”Update”按钮,当显示连接成功后点击”Cancel”按钮 :点击” 按钮, 按钮 当显示连接成功后点击” 按钮
刷新/取消按钮 刷新 取消按钮
当电脑搜索到所连变频器后,点击 按钮, 当电脑搜索到所连变频器后,点击Shell按钮,进入参数界面 按钮
伺服控制器的初始化设置
伺服控制器的初始化设置
STET12:设置PI参数,建议点击“Apply proposal”按钮使用 :设置 参数 建议点击“ 参数, 按钮使用 系统推荐值
富士伺服驱动器全参数设定基本操作。

4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线(L1、L2、L3)・确认伺服电机动力线(U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的"变更" 项目的"电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子[CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
富士伺服驱动器参数设定及基本操作。

4.2.1第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
富士伺服驱动器参数设定与基本操作
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。
利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
上海富士电梯全套接线图
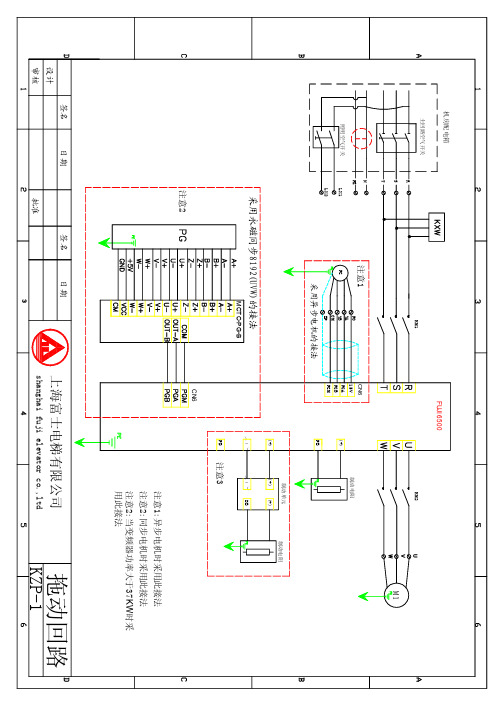
SHANGHAI FUJI ELEVATOR CO.,LTD审核设计批准签名日期签名校对日期KZP-9五方通话蓄电池0112433214轿厢免提话机657呼叫按键工作市电复位+--+867109115接机房警铃电源应急照明红黑白黑红黑红轿顶话机井道话机值班话机机房话机应急照明灯DC12V警铃DC12V R1N1AC220V 电源N-P+LA YP+N-LA YA4.2A4.1A4.3A4.4N-P+LA YS3.10S3.9A2.4A2.3123456 123456检修箱急停F3F4检修箱220V插座501502PE601检修箱36V插座602检修箱36V插座601电源开关602A2检修开关+24V检修上行JSXJXXJSXJXX检修下行602601501PE502110F4JSXJXX A2+24V220V闸刀开关F29801PE1112A210JXX275011108502660160254JSX3线号编号+24V1电缆线号A4A3注:将右面检修箱上原器件上接好的线接到左面端子排上,端子排上写上线号,接的时候按照图纸一一对应签名批准校对日期日期签名WW-1轿顶检修箱制作图SHANGHAI FUJI ELEVATOR CO.,LTD A4A3A4A380214PE13802801门机电源PE101502602115601线号端口号501照明箱急停115F6照明箱220V插座501502PE601照明36V插座602照明箱36V插座601电源开关602110照明箱接线端子602601501PE502115F6F6注:将右面照明箱上原器件上接好的线接到左面端子排上,端子排上写上线号,接的时候按照图纸一一对应批准签名日期签名校对日期WW-2井道照明箱制SHANGHAI FUJI ELEVATOR CO.,LTD轿顶对讲机黑红黑红红黑123456C B AD1234562号1号J1-1插座5号:XQJ下强减6号:XQJ下强减4号:XXW下限位3号:XXW下限位1号:SJX上极限2号:SJX上极限J1-1插座SQJ2,XQJ2数字量多段速控制各开关位置表:距离(mm)SJX,XJX SXW,XXW SQJ,XQJ SQJ1,XQJ1SQJ1,XQJ1SQJ,XQJ SXW,XXW单层强慢双层强慢限位30~50900模拟量控制各开关位置表:SJX,XJX距离(mm)极限开关0.63m/s梯速150240030~5030~50120030~5026001800520030~5030~5018003600单层强慢双层强慢限位1501.6m/s1501.0m/s1.75m/s1501802.5m/s1802.0m/s极限开关30~5030~5090014002800140030~50260030~50140038001400280030~500.63m/s梯速1501.0m/s1501.75m/s1.6m/s1501502.0m/s1805400280030~501400 2.5m/s180三层强慢上极限SJX上限位SXW上终端开关2SQJ2上终端开关1SQJ1上终端开关SQJ下终端开关XQJ下终端开关1XQJ1下终端开关2XQJ2下限位XXW下极限XJX5号6号7号8号3号4号1号2号9号10号4号3号5号6号7号9号8号10号1号2号J4-1插座9号J3-1插座8号7号8号7号10号9号:XQJ2下强减10号:XQJ2下强减7号:XQJ1下强减8号:XQJ1下强减J4-1插座9号10号4号:SXW上限位6号:SQJ上强减5号:SQJ上强减3号:SXW上限位1号2号J2-1插座2号:XJX下极限1号:XJX下极限J2-1插座9号:SQJ2上强减210号:SQJ2上强减28号:SQJ1上强减17号:SQJ1上强减1J3-1插座注意1注意2注意1:当电梯速度在2M/S或以上时要求安装此开关注意2、3:当电梯速度在2M/S或以上时要求安装此开关并按要求接线注意3 SHANGHAI FUJI ELEVATOR CO.,LTD审核设计批准签名日期签名校对日期WW-3终端开关制作图4号5号6号3号5号4号6号3号。
富士伺服驱动器参数设定及基本操作。
4.2.1 第一阶段连接伺服放大器及伺服电机,进行试运行。
配线方法参照3 章。
在伺服电机的输出轴未连接到机械系统的状态下进行试运行。
在第一阶段确认以下项目。
<确认>・确认伺服放大器的电源配线 (L1、L2、L3)・确认伺服电机动力线 (U、V、W)、编码器电缆线・确认伺服放大器、伺服电机是否正常工作・确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序(1) 请固定伺服电机,以防其横向翻倒。
将伺服电机牢固固定不要在电机的输出轴上安装任何东西(2) 请按3 章的配线,为伺服放大器与伺服电机配线。
※第一阶段进行单体试运行,故不要连接到CN1 上。
(3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。
i) 请确认充电用显示灯。
ii) 请确认触摸面板显示。
※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。
5 参数5.1 参数构成伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。
由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。
作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。
(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。
)5.1.1 利用触摸面板编集的方法5-25.2 参数一览表5.3 参数说明利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。
输出脉冲数和命令脉冲补偿无关。
根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
※只在位置控制时有效。
可以选择输入脉冲串端子的信号形式。
可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。
最大输入频率在差动输入时为1.0 [MHz],在集电极开路输入时为200 [kHz]。
富士 伺服接线图与初始化
FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)驱动器侧CN2 电机侧插头P5 1 7 P5M5 2 8 M5+SIG 5 4 +SIG-SIG 6 5 -SIG外壳 3 FG二、动力线的接线驱动器侧电机侧插头U 1 1 UV 2 2 VW 3 3 W地 4 地三、相关参数设置注:设置好参数请重新上电。
四、操作说明线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF1.按MODE/ESC键多次直到面板上显示:PA012.按ENT 键1秒以上,面板显示:P1.013.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
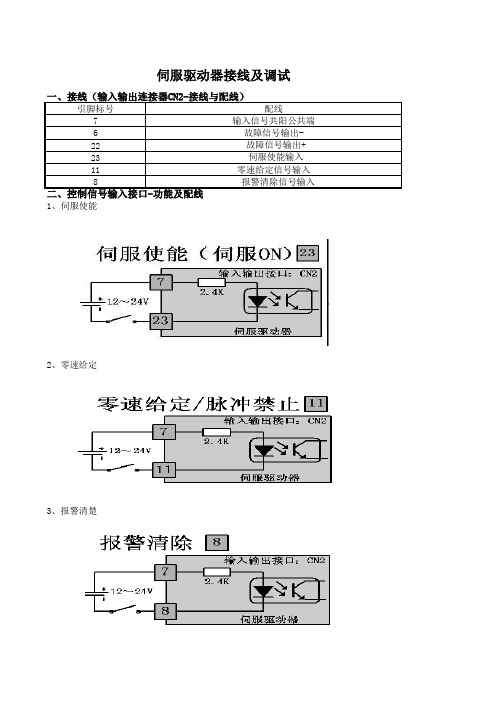
伺服驱动器接线及调试
引脚标号
762223118
伺服驱动器接线及调试
零速给定信号输入 报警清除信号输入
二、控制信号输入接口-功能及配线
1、伺服使能
2、零速给定
3、报警清楚
一、接线(输入输出连接器CN2-接线与配线)
配线
输入信号共阳公共端故障信号输出- 故障信号输出+ 伺服使能输入
三、控制信号输出接口-功能及配线故障输出信号输出:
伺服正常工作时,输出有效。
伺服出现故障时,输出无效。
四、通电试运行检查接线是否有问题
功能码设定值参数说明
F001内部速度运行
模式
F0E0 0驱动器内部默认方向定义
F1F0 0零速给定信号输入使能后,电机零速或零位锁轴,电机绕组处于激磁
状态
F300速度方式下电机从0rpm到1000rpm的加速
时间
F310速度方式下电机从1000rpm到0rpm的减速时
间
F320当F00=1,四段内部速度运行
方式
F33
-90(根据现
场实际情况来
选定方向及速
度,如果方向
相反则改为
正)
内部速度方式
时第一段内部
速度
内部速度1(rpm)
五、参数的设定(试运行检查无误后)
选择控制模式
方向指令取反/零速给定信号
机械制动器释放使能信号输出/
零速信号输出/转矩到达限定值
输出/电机停转时的绕组状态
加速时间(ms)
减速时间(ms)
速度模式运行方式选择
参数定义。
伺服驱动器接线原理图

模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V~+10V。
CN2-13
模拟量输入地
Vingnd
模拟输入的地线。
CN2-1
伺服准备好输出
SRDY
Type2
P,S
伺服准备好输出端子
SRDY ON:控制电源和主电源正常,驱动器没有报警,伺服准备好输出ON
CN2-16
AOUT-
CN2-22
编码器B相信号
BOUT+
Type5
P,S
CN2-10
BOUT-
P,S
CN2-24
编码器Z相信号
ZOUT+
Type5
P,S
CN2-11
ZOUT-
P,S
CN2-2
编码器Z相集电极开路输出
CZ
Type6
P,S
1.编码器Z相信号由集电极开路输出,编码器Z相信号出现时,输出ON(输出导通),否则输出OFF(输出截止);
端子记号
颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
电缆长度较长时,应使用多根芯线并联,减小线路压降。
CN1-1
CN1-2
CN1-3
CN1-4
CN1-16
电源公共地
0V
CN1-24
编码器A+输入
A+
Type4
与伺服电机光电编码器A+相连接
CN1-12
编码器A-输入
A-
与伺服电机光电编码器A-相连接
富士变频器接线图FRENIC-MEGA 系列
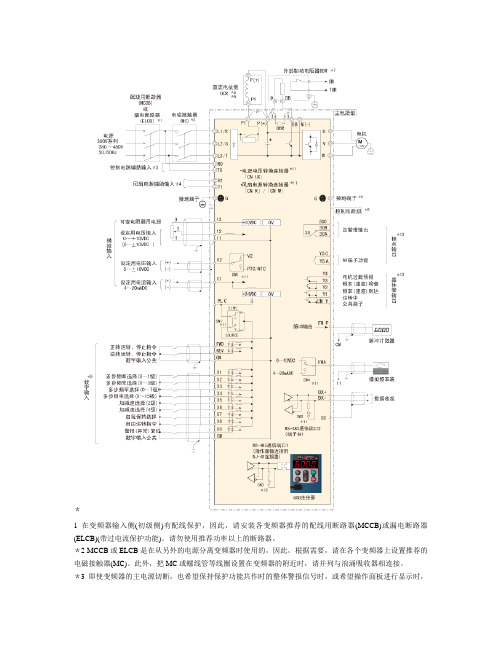
*1 在变频器输入侧(初级侧)有配线保护,因此,请安装各变频器推荐的配线用断路器(MCCB)或漏电断路器(ELCB)(带过电流保护功能)。
请勿使用推荐功率以上的断路器。
*2 MCCB或ELCB是在从另外的电源分离变频器时使用的,因此,根据需要,请在各个变频器上设置推荐的电磁接触器(MC)。
此外,把MC或螺线管等线圈设置在变频器的附近时,请并列与浪涌吸收器相连接。
*3 即使变频器的主电源切断,也希望保持保护功能共作时的整体警报信号时,或希望操作面板进行显示时,请把本端子连接到电源上。
即使不向该端子提供电源输入,变频器也可以运转。
*4 通常不需要连接。
高功率因子电源感应PWM转换器: 与RHC系列(以下称为PWM转换器)组合时使用。
*5 连接直流电抗器(DCR)选配件时,请拆下端子P1-P(+)间的短路棒后再进行连接。
*6 适用电机的输出功率为75kW以上时,请务必连接直流电抗器(DCR)选配件。
并且,电源变压器的功率为500kV A以上,且是变频器额定功率的10倍以上时,及在同一电源系统“有半导体负荷时”,请连接直流电抗器(DCR)*7 在7.5kW以下的变频器上的端子P(+)-DB之间,连接有内置制动电阻器。
在连接了外部制动电阻器(选配件)时,请务必拆除内置制动电阻器的连接。
*8 是电机的接地用的端子。
请根据需要连接。
*9 在控制信号线中,请使用双绞线或屏蔽线。
屏蔽线请接地。
为了防止噪音导致的误动作,请尽量与主电路配线分隔开,切勿放入同一个电缆槽内。
(建议距离10cm以上。
)出现交叉时,请与主电路配线尽可能垂直相交。
*10 在端子FWD、REV以及X1~X9(数字输入),端子Y1~Y4(晶体管输出),端子Y5A/C,30A/B/C(接点输出)中记载的各种功能,显示的是出厂时所赋予的功能。
*11 是主电路的切换连接器。
详情请参考使用说明书。
*12 是控制印刷电路板上的各种切换开关,可设定变频器的动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)
驱动器侧CN2 电机侧插头
P5 1 7 P5
M5 2 8 M5
+SIG 5 4 +SIG
-SIG 6 5 -SIG
外壳 3 FG
二、动力线的接线
驱动器侧电机侧插头
U 1 1 U
V 2 2 V
W 3 3 W
地 4 地
三、相关参数设置
注:设置好参数请重新上电。
四、操作说明
线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF
1.按MODE/ESC键多次直到面板上显示:PA01
2.按ENT 键1秒以上,面板显示:P1.01
3.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想
移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,
闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参
数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化
按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
【下载本文档,可以自由复制内容或自由编辑修改内容,更多精彩文章,期待你的好评和关注,我将一如既往为您服务】。