伺服接线图
西门子1200与三菱MRJ4伺服接线图
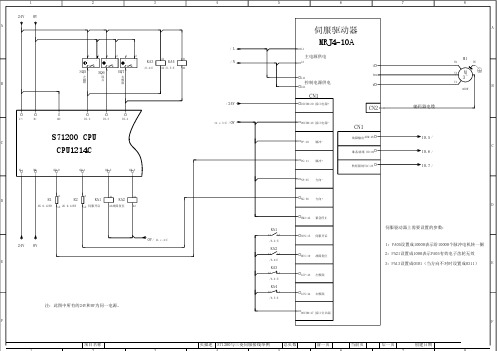
1234567824V0VA121212+-+-+-KA3/L A1A1KA4/N伺服驱动器MRJ4-10AL1主电源供电L3AM1W1PESQ53左极B限SQ63原点SQ73右极限/6.4:EA2/6.5:EA2/24VL11控制电源供电L21CN1DICOM:20接口电源+U V WCN2编码器电缆V1M 3~U1B400WL+:M:1M:I0.2I0.3I0.411.c.3:E /0VDOCOM:46接口电源-CN1S71200CPU CCPU1214CPP:10脉冲-故障输出ALM:48准备就绪RD:49I0.5/CI0.6/3L:3M:Q0.0Q0.1Q0.2Q0.3PG:11脉冲+转矩限制TLC:23I0.7/NP:35方向-x1DR1x1R2KA1A1A1KA2NG:36方向+2K 0.125Wx22K 0.125Wx2伺服开启A2故障复位A2DKA1EM2:42紧急停止伺服驱动器上需要设置的参数:1413SON:15伺服开启24V0V0V /11.c.4:C/6.2:EKA21:PA05设置成10000表示给10000个脉冲电机转一圈1413RES:19故障复位2:PA21设置成1000表示PA05有效电子齿轮无效E/6.4:EKA33:PA13设置成0301(当方向不对时设置成0311)E1211LSP:43左极限/6.4:EKA41211LSN:44右极限注:此图中所有的24V和0V为同一电源。
/6.5:EDOCOM:47接口公共端FF创建日期项目名称页描述S71200与三菱伺服接线举例总页数前一页当前页后一页。
富士 伺服接线图与初始化

FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)驱动器侧CN2 电机侧插头P5 1 7 P5M5 2 8 M5+SIG 5 4 +SIG-SIG 6 5 -SIG外壳 3 FG二、动力线的接线驱动器侧电机侧插头U 1 1 UV 2 2 VW 3 3 W地 4 地三、相关参数设置注:设置好参数请重新上电。
四、操作说明线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF1.按MODE/ESC键多次直到面板上显示:PA012.按ENT 键1秒以上,面板显示:P1.013.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
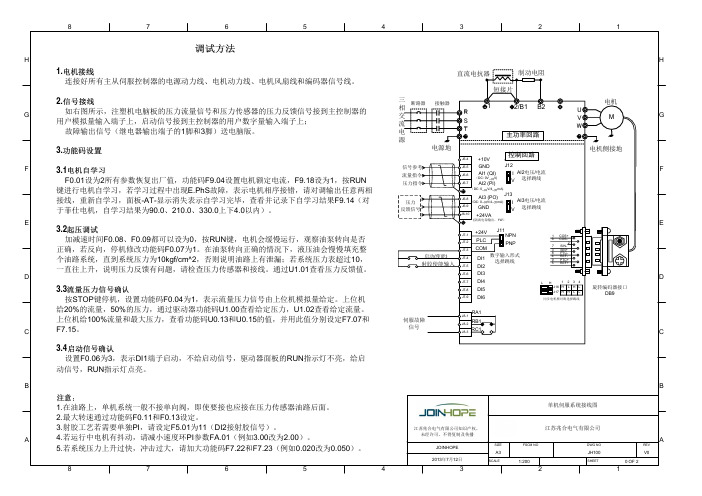
JH100液压伺服系统单机系统信号接线图V1.01
江苏兆合电气有限公司知识产权,
+24VA
+24V 隔离电源输出,连接好所有主从伺服控制器的电源动力线、电机动力线、电机风扇线和编码器信号线。
如右图所示,注塑机电脑板的压力流量信号和压力传感器的压力反馈信号接到主控制器的用户模拟量输入端子上,启动信号接到主控制器的用户数字量输入端子上;脚和3脚)送电脑版。
3.1
F0.01设为键进行电机自学习,若学习过程中出现接线,重新自学习,面板于菲仕电机,自学习结果为3.2
加减速时间F0.08正确,若反向,停机修改功能码个油路系统,直到系统压力为一直往上升,说明压力反馈有问题,请检查压力传感器和接线。
通过按STOP 键停机,设置功能码20%的流量,50%的压力,通过驱动器功能码上位机给100%流量和最大压力,查看功能码F7.15。
设置F0.06为3,表示动信号,RUN 指示灯点亮。
在油路上,单机系统一般不接单向阀,即使要接也应接在压力传感器油路后面。
最大转速通过功能码射胶工艺若需要单独若运行中电机有抖动,请减小速度环。
伺服CN1接线图

棕色
I:2。11 报警
白色
I:3。03 定位 INP
黑白
Q100。06 脉冲输出 CW 绿色
Q100。07 脉冲输出 CCW 粉红
Q101。05 偏差计数器复位 紫黑
Q104。04 报警复位
紫色
Q101。07 伺服 ON
黄黑
P24V
黄色、棕黑、绿黑
0V
灰、灰白
棕色
I;2。10 报警
白色
I:3。02 定位 INP
黑白
Q100。04 脉冲输出 CW 绿色
Q100。05 脉冲输出 CCW 粉红
Q101。04 偏差计数器复位 紫黑
Q104。03 报警复位
紫色
Q101。06 伺服 ON
黄黑
P24V
黄色、棕黑、绿黑
0V
灰、灰白
旋转 B 伺服接线
I:1。02 原点输入
I:0。02 原点输入
棕色
I:2。09 报警
白色
I;3。01 定位 INP
黑白
Q100。02 脉冲输出 CW
绿色
Q100。03 脉冲输出 CCW 粉红
Q101。03 偏差计数器复位 紫黑
Q104。04 报警复位
紫色
Q101。01 伺服 ON
黄黑
P24V
黄色、棕黑、绿黑
0V
灰、灰白
Hale Waihona Puke 旋转 A 伺服接线I:1。00 原点输入
直线 A 伺服接线
I:0。00 原点输入
棕色
I:2。08 报警
白色
I:3。00 定位 INP
黑白
Q100。00 脉冲输出 CW
绿色
Q100。01 脉冲输出 CCW 粉红
伺服驱动器接线原理图
Type1
P,S
报警清除输入端子
ALRS ON:清除系统报警
ALRS OFF:保持系统报警
CN2-23
偏差计数器清零
CLE
Type1
P
位置偏差计数器清零输入端子
CLE ON:位置控制时,位置偏差计数器清零
CN2-12
模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V~+10V。
CN2-11
编码器B-输入
B-
与伺服电机光电编码器B-相连接
CN2-22
编码器Z+输入
Z+
Type4
与伺服电机光电编码器Z+相连接
CN2-10
编码器Z-输入
Z-
与伺服电机光电编码器Z-相连接
CN1-21
编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
U-
与伺服电机光电编码器U-相连接
CN2-13
模拟量输入地
Vingnd
模拟输入的地线。
CN2-1
伺服准备好输出
SRDY
Type2
P,S
伺服准备好输出端子
SRDY ON:控制电源和主电源正常,驱动器没有报警,伺服准备好输出ON
SRDY OFF:主电源未合或驱动器有报警,伺服准备好输出OFF
CN2-15
伺服报警输出
ALM
Type2
P,S
CN1-20
编码器V+输入
V+
Type4
与伺服电机光电编码器V+相连接
CN1-8
编码器V-输入
7-1 西门子V90伺服系统接线

1. V90伺服系统的硬件功能图
2. V90伺服系统的主电路的接线
3.伺服驱动器控制电路接线-数字量输入
伺服驱动器漏型输入实例
伺服驱动器源型输入实例
3.伺服驱动器控制电路接线-数字量输入
3.伺服驱动器控制电路接线-数字量输出
伺服驱动器漏型输ቤተ መጻሕፍቲ ባይዱ实例
伺服驱动器源型输出实例
3.伺服驱动器控制电路接线-模拟量输出
模拟量输出的电压信号可以反应伺服驱动器的运行状态,如电动机的旋转速度
3.伺服驱动器控制电路接线-脉冲输入PTI
感谢您的聆听
THANK YOU!
数字量输出1~3支持 NPN一种接线方式。数字量输出4~6支持 PNP 和 NPN 两种接线方式示。
3.伺服驱动器控制电路接线-数字量输出
支持 PNP 和 NPN 接 线方式
示
支持 NPN接 线方式
3.伺服驱动器控制电路接线-模拟量输入
模拟量输入的主要功能进行速度调节和转矩调节或速度限制和转矩限制
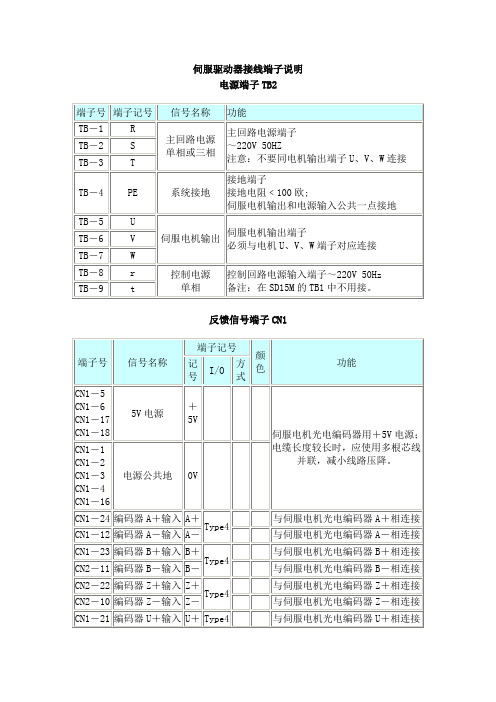
伺服驱动器接线原理图

伺服驱动器接线原理图伺服驱动器接线端子说明电源端子TB2端子号端子记号信号名称功能TB-1 R主回路电源单相或三相主回路电源端子~220V 50HZ注意:不要同电机输出端子U、V、W连接TB-2 S TB-3 TTB-4 PE 系统接地接地端子接地电阻﹤100欧;伺服电机输出和电源输入公共一点接地TB-5 U伺服电机输出伺服电机输出端子必须与电机U、V、W端子对应连接TB-6 V TB-7 WTB-8 r 控制电源单相控制回路电源输入端子~220V 50Hz 备注:在SD15M的TB1中不用接。
TB-9 t反馈信号端子CN1端子号信号名称端子记号颜色功能记号I/O方式CN1-5CN1-6 CN1-17 CN1-18 5V电源+5V伺服电机光电编码器用+5V电源;电缆长度较长时,应使用多根芯线并联,减小线路压降。
CN1-1CN1-2CN1-3CN1-4CN1-16电源公共地0VCN1-24 编码器A+输入A+Type4 与伺服电机光电编码器A+相连接CN1-12 编码器A-输入A-与伺服电机光电编码器A-相连接CN1-23 编码器B+输入B+Type4 与伺服电机光电编码器B+相连接CN2-11 编码器B-输入B-与伺服电机光电编码器B-相连接CN2-22 编码器Z+输入Z+Type4 与伺服电机光电编码器Z+相连接CN2-10 编码器Z-输入Z-与伺服电机光电编码器Z-相连接CN1-21 编码器U+输入U+T ype4 与伺服电机光电编码器U+相连接CN1-9 编码器U -输入 U - 与伺服电机光电编码器U -相连接 CN1-20 编码器V +输入 V + Type4 与伺服电机光电编码器V +相连接 CN1-8 编码器V -输入 V - 与伺服电机光电编码器V -相连接 CN1-19 编码器W +输入 W + T ype4 与伺服电机光电编码器W +相连接 CN1-7 编码器W -输入 W - T ype4 与伺服电机光电编码器W -相连接控制信号输入/输出端子CN2控制方式简称:P 代表位置控制方式 S 代表模拟量速度控制方式 端子号 信号名称 记号 I/O 方式 功能CN2-8 输入端子的电源正极 COM + Type1 输入端子的电源正极用来驱动输入端子的光电耦合器DC12~24V ,电流≥100m ACN2-20 指令脉冲禁止 INH Type1 P 位置指令脉冲禁止输入端子 INH ON :指令脉冲输入禁止INH OFF :指令脉冲输入有效CN2-21 伺服使能 SON Type1 P,S 伺服使能输入端子SON ON :允许驱动器工作SON OFF :驱动器关闭,停止工作电机处于自由状态注1:当从SON OFF 打到SON ON 前,电机必须是静止的注2:打到SON ON 后,至少等待5ms 再输入命令注3:如果用PA27打开内部使能,则SON信号不检测。
台达B伺服接线图
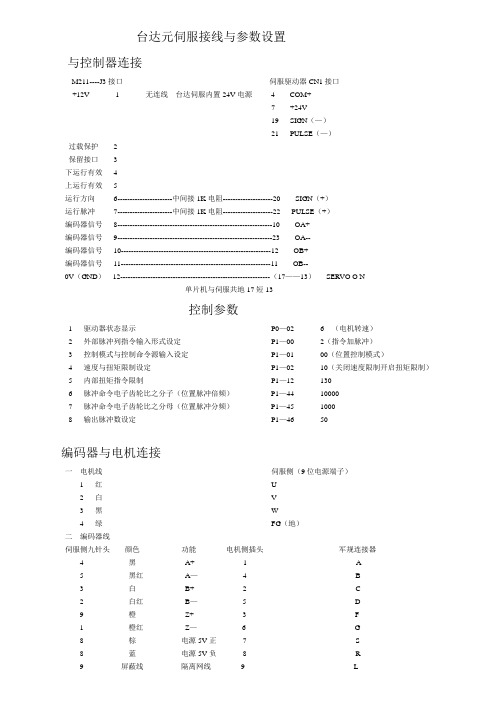
台达元伺服接线与参数设置与控制器连接M211----J3接口伺服驱动器CN1接口+12V 1 无连线台达伺服内置24V电源 4 COM+7 +24V19 SIGN(—)21 PULSE(—)过载保护 2保留接口 3下运行有效 4上运行有效 5运行方向6----------------------中间接1K电阻--------------------20 SIGN(+)运行脉冲7----------------------中间接1K电阻--------------------22 PULSE(+)编码器信号8--------------------------------------------------------------10 OA+编码器信号9--------------------------------------------------------------23 OA--编码器信号10------------------------------------------------------------12 OB+编码器信号11------------------------------------------------------------11 OB--0V(GND)12------------------------------------------------------------(17——13)SERVO O N单片机与伺服共地17短13控制参数1 驱动器状态显示P0—02 6 (电机转速)2 外部脉冲列指令输入形式设定P1—00 2(指令加脉冲)3 控制模式与控制命令源输入设定P1—01 00(位置控制模式)4 速度与扭矩限制设定P1—02 10(关闭速度限制开启扭矩限制)5 内部扭矩指令限制P1—12 1306 脉冲命令电子齿轮比之分子(位置脉冲倍频)P1—44 100007 脉冲命令电子齿轮比之分母(位置脉冲分频)P1—45 10008 输出脉冲数设定P1—46 50编码器与电机连接一电机线伺服侧(9位电源端子)1 红U2 白V3 黑W4 绿FG(地)二编码器线伺服侧九针头颜色功能电机侧插头军规连接器4 黑A+ 1 A5 黑红A— 4 B3 白B+ 2 C2 白红B— 5 D9 橙Z+ 3 F1 橙红Z— 6 G8 棕电源5V正7 S8 蓝电源5V负8 R9 屏蔽线隔离网线9 L。
台达各系列伺服脉冲接线图

各系列伺服脉冲接线图
<1>NPN 接线方式(24V 输入型) :适用 A,A+,AB,A2 伺服。
<2>NPN 接线方式(5V 输入型) :适用 A,A+入型) :适用 A,A+,AB,A2 伺服。
<9>PNP 接线方式(5V 输入型) :适用 B2 伺服。
<10>差动接线方式:适用 B2 伺服。
注:上图唯有<1>为详细画法,其余均为省略画法,由此可参考<1>.
<4>PNP 接线方式(5V 输入型) :适用 A,A+,AB,A2 伺服。
<5>差动接线方式:适用 A,A+,AB,A2 伺服。
<6>NPN 接线方式(24V 输入型) :适用 B2 伺服。
<7>NPN 接线方式(5V 输入型) :适用 B2 伺服。
<8>PNP 接线方式(24V 输入型) :适用 B2 伺服。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
=FJ+ZS-W8
/6.8
B线过渡皮带动力电源 1.7 / N5
伺服01 / L5
SCHNEIDER. 伺服电机电源线 (4×2.5mm²) 1m 4x0.25 300 V
YE
GN
RD
SCHNEIDER 伺服电机信号线 1m 1x0.5 5V BK
BK/3.5Fra bibliotekUV
W
PE
CN2
=FJ+ZS-MS1
33
32
31
30
7,5,3,1,28
6
4
2
HOME /
26
ORGP /
P1 / 5.9
CTRG /
TPOS /
POS0 /
POS1 /
27
COM
SON
POS0
POS1
CTRG
ORGP
STOP
JOGU
JOGO
24V
TQL
ALARM
TPOS
HOME
备用
R
S
T
L1
L2
PE
U
V
W
PE'
CN2
编码器
CN3
=FJ+ZS-W7
7
8
9
ALARM / 5.a.6
伺服电机接线,线标打印箭头所示, 如TQL/5.b.6,打印TQL 总数10根(使用8根,备件2根) 长度1.5M
SON / 5.a.3
TQL / 5.a.6
COM / 6.0
P1 / 6.0
JOGU /
JOGD /
SPD0 /
SPD1 /
8根
-DRV2
/4.2 4.5KW 链板机 伺服驱动器
11
9
10
34
8
33
32
31
30
7,5,3,1,28
6
4
2
26
27
COM
SON
SPD0
SPD1
CTRG
ORGP
STOP
JOGU
JOGD
24V
TQL
ALARM
TPOS
HOME
备用
R
S
T
L1
L2
PE
U
V
W
PE'
CN2
编码器
CN3
=FJ+ZS-W3
/4.5
=FJ+ZS-W4
/4.6
B线主伺服动力电源 / -R2
B线主伺服动力电源 / -S2
B线主伺服动力电源 / -T2
SCHNEIDER. 伺服电机电源线 (4×2.5mm²) 1m 4x0.25 300 V
YE
GN
RD
SCHNEIDER 伺服电机信号线 1m 1x0.5 5V BK
BK
=FJ+ZS-MS2
/4.5 伺服电机 外部安装 U V W PE CN2
伺服电机 外部安装
M
伺服电机
5 设计 CHY 日期 2013/12/6 审核 批准 宜宾烟草物流中心分拣系统
5.b
天海欧康科技信息(厦门)有限公司 宜宾烟草物流中心 YB_FJ_20131206 通道机02柜_驱动原理图003 YB_FJ =FJ +ZS 页数 页数 5.a 1300
0
1
2
3
4
5
6
0
1
2
3
4
5
6
7
8
9
伺服电机接线,线标打印箭头所示字母, 如TQL/5.b.6,打印TQL 总数318根(使用308根,备件10根) 长度1.6M
316根
ALARM / 5.b.6
SON / 5.b.3
TQL / 5.b.6
COM / 5.9
-DRV1
/3.2 0.7KW 伺服驱动器
11
9
10
34
8
M
伺服电机
5.a 设计 CHY 日期 2013/12/6 审核 批准 宜宾烟草物流中心分拣系统
6
天海欧康科技信息(厦门)有限公司 宜宾烟草物流中心 YB_FJ_20131206 主伺服柜_驱动原理图002 YB_FJ =FJ +ZS 页数 页数 5.b 1300