低频振荡时的汽轮机调速控制方式在线调整策略_竺炜
电网侧扰动引起共振型低频振荡的机制分析_竺炜
第29卷第25期中国电机工程学报 V ol.29 No.25 Sep. 5, 20092009年9月5日 Proceedings of the CSEE ©2009 Chin.Soc.for Elec.Eng. 37 文章编号:0258-8013 (2009) 25-0037-06 中图分类号:TM 71 文献标志码:A 学科分类号:470⋅40电网侧扰动引起共振型低频振荡的机制分析竺炜1,周有庆2,谭喜意1,唐颖杰1(1.长沙理工大学电气与信息工程学院,湖南省长沙市 410114;2.湖南大学电气与信息工程学院,湖南省长沙市 410082)Mechanism Analysis of Resonance-type Low-frequency Oscillation Causedby Networks Side DisturbanceZHU Wei1, ZHOU You-qing2, TAN Xi-yi1, TANG Ying-jie1(1. College of Electrical & Information Engineering, Changsha University of Science & Technology, Changsha 410114, Hunan Province, China; 2. College of Electrical & Information Engineering, Hunan University, Changsha 410082, Hunan Province, China)ABSTRACT: The source and cause of oscillation are studied as the main problem for the resonance-type low-frequency oscillation at present. Through the analysis of power-frequency rotate speed regulation mechanism and damping of turbo- generators, it can be concluded that practical power-frequency control mode makes mechanical power damping decrease when network side power disturbance occurs; “inverse regulating” of mechanical power will happen at the beginning, and initiate oscillation rapidly; when disturbance frequency is close to resonance frequency, mechanical power resonance will be triggered. Simulation research based on the typical parameters model demonstrates the above analysis is correct, and oscillation of some machine initiated by small disturbance may be coupled and amplified between generating units if resonance frequencies of generating units are close to each other. The research is practically significant for promoting the mechanism research of resonance-type low-frequency oscillation, improving practical power-frequency rotate speed control and debugging methods of steam turbines, inhibiting low-frequency oscillation in the power system.KEY WORDS: power-frequency rotate speed regulating; inverse regulating; damping; low-frequency oscillation; resonance mechanism摘要:振荡源和振荡起因问题是目前共振型低频振荡研究的主要问题。
3.3汽轮机的调节方式及调节级变工况

调节级为例
简化假设:
(1)调节级后的压力p2∝G
(2) 设 m 0 ,则 p 1 1p 21 (3)四个调节汽门依次开启,没有重叠度; (4)凡全开调节汽门后的喷嘴组前压力均为
p 不0' 变。
调节阀后即各喷嘴组前的压力p01 、p02是 变动的,其值取决于各调节阀的开度大小,喷 嘴后压力p1各喷嘴都相同。
应用: 滑压运行——承担基本负荷,还可用于调峰; 定压运行——承担基本负荷。
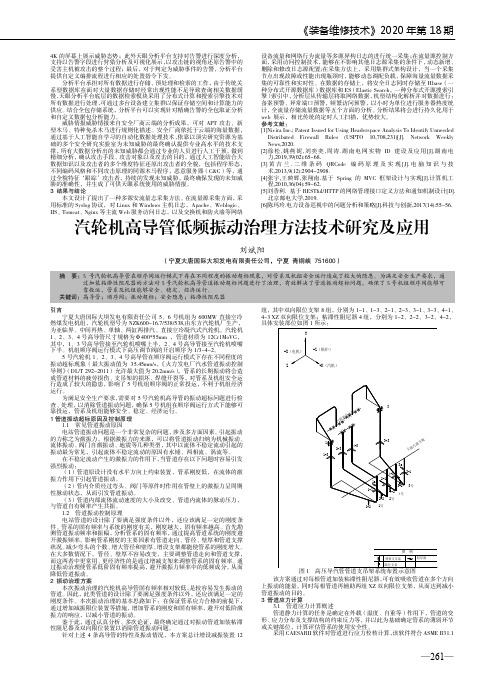
★旁通调节 1、旁通调节有外旁通调节和内旁通调节
外旁通调节
内旁通调节
2、旁通调节的工作原理: (1)当经济功率时,调节阀2全开,旁通 阀3、4关闭。相当于节流调节; (2)当过负荷时,调节阀2全开,旁通阀 部分开启。由于后几级有较大的通流面积,可 以多进汽、多作功;
点n之后, < p 2,流p c量r 为临界。
(4)通过喷嘴组的流量:如ILMN所示。
3ቤተ መጻሕፍቲ ባይዱ第三阀开启过程:
(1)阀后(喷嘴组前)压力:
p
0
,如
“4-5-
7”所示;
(2)临界压力为: ’d-e-g’ 线,(整个
级从 ’H’ 点后p,2
>p c
);
(3)喷嘴组后的压力:p 2 > p cr ; (4)亚临界流动。
01 线 , 终 焓 为h 1 , 有 效 焓 降
为 h i1 h 0 ; h 1 为通D过x 旁通阀进入 旁通室的流量,压力为 ,终焓
为 p x,而混合后的h 0 焓值为 。
hx
h x D 1 D h 1 1 D D x x h 0 D 1 (h 0 D h i1 ) D x h 0 h 0 D D 1 h i1
电力系统低频振荡实时监测与控制新方法及工程应用
摘要随着我国电力工业的不断发展,西电东输、南北互供战略的实施,我国大区电网之间的互联已经进入规划和实施阶段。
随着系统规模的扩大,互联以及大型机组快速励磁系统的采用,电力系统的低频振荡问题也随之凸显,特别是通过交流输电线互联的系统,由于送电距离长,而联络线又相对较弱,很容易由此引发低频振荡,如果没有足够的阻尼,低频振荡发生后将长时间不能平息,以至于引起并联运行系统失步甚至解列。
近年来,低频振荡在广东电网中时有发生。
为对低频振荡实施有效的控制,一是需要快速检测出电网是否发生低频振荡;二是在电网发生低频振荡的情况下,需要快速辨识出低频振荡的特征参数以及最先发生功率振荡的时刻、相应的设备或线路,以便锁定振荡源。
目前应对低频振荡问题的技术和方法还不能够满足实际电网运行要求,有必要进一步开展相关研究。
论文围绕复杂大电网低频振荡在线辨识方法、可视化监测方法、扰动源定位方法、控制方法及工程应用等方面进行了系统研究,取得的主要成果如下:(1)提出了基于快速幂法子空间跟踪的低频振荡在线辨识方法。
采用基于PMU信号的归一化峰度和滑动窗技术来实时检测电网是否发生扰动,在有扰动的情况下应用快速幂法子空间跟踪算法对低频振荡进行在线辨识,利用归一化峰度来判定最先发生功率振荡的时间点,将此时间点与相应时间区间内的遥信变位信息相比较,以便锁定低频振荡的扰动源。
仿真测试以及实例分析的结果表明,这种基于扰动时间相关性分析的扰动源定位方法具有原理简单、计算快速、辨识可靠等优点。
(2)提出了基于不完全S变换的低频振荡可视化监测方法。
引入不完全S变换方法处理PMU数据并绘制二维时频图,供调度人员参考。
实例结果表明,该方法能够有效识别低频振荡的振荡模式个数及各模式对应的频率和起振时间,对电网调度人员进行低频振荡的实时监测大有帮助。
并将基于GPU的并行优化算法应用于S 变换中的FFT 及其逆变换的运算,大大提高了计算效率。
(3)提出了基于发电机组分群辨识的低频振荡扰动源定位及调度控制方法。
汽轮机低压加热器运行中异常振动的分析及调整

汽轮机低压加热器运行中异常振动的分析及调整摘要:本文介绍了宁电投银川热电有限公司汽轮机组的基本情况,以及低压加热器汽侧及疏水系统,详细说明了低加在运行中出现的异常振动情况,及相应的分析调整。
关键词:低压加热器振动分析调整低压加热器的作用是利用在汽轮机内做过部分功的蒸气,抽至加热器内加热凝结水,提高水的温度,减少了汽轮机排往凝汽器中的蒸气量,降低了能源损失,提高了热力系统的循环效率。
我厂设计有两台低压加热器,型式是立式U型管表面换热式,换热面积:40平米,水道数:四流程,汽侧最高设计压力0.28MPa,水侧最高允许压力1.5MPa。
1 我厂汽轮机组概况及低压加热器汽侧、疏水系统我厂系热电厂冬季担负着供暖任务,汽轮机型号:C12-4.9/0.981,型式:次高压、单缸、冲动、调整抽汽式汽轮机。
级数:1(高压调节级)+1(低压调节级)+9(压力级)共11级。
额定进汽量87t,最大进汽量115t,额定抽汽量:50t,最大抽汽量:87t。
一段抽汽:第三级后,抽汽压力0.98MPa,抽汽温度300℃,供分汽缸{热网加热器,除氧器};二段抽汽:第五级后,抽汽压力0.23MPa,温度175℃,供#2低加、厂区汽暖;三段抽汽:第八级后,抽汽压力0.052MPa,温度82℃,供#1低加。
#1、2低加疏水运行方式为串联运行,即正常运行时疏水串联门开启,疏水并联门关闭。
空气门正常运行时均在开启状态。
前汽封泄汽至二段抽汽泄气门,正常运行时为防止前汽封刺汽过大导致汽轮机前箱进水,从而使油系统进水,所以正常运行时为开启状态。
如图1所示。
2 低加异常振动及分析进入冬季供暖期以后,#2机#1低加时常出现振动现象,并且#1低加出水温度也有所下降,导致#2低加出水温度随之下降。
#1低加在运行中出现的此种异常现象,对机组的安全运行造成了一定的威胁,并且使机组热效率下降。
运行值班员发现此种异常情况后,及时的做了相关的分析调整。
值班员积极全面地检查系统,分析#1低加异常振动的原因,经全面检查、认真分析得出以下两个原因造成#1低加异常振动及出水温度下降:一#2低加疏水器通流能力下降,在正常运行时,为保证#2低加水位正常,必须开启#2低加疏水器旁路门。
水轮机及其调速系统对电力系统低频振荡的影响分析
Th t yo w- e e yOs i a inso dr —u b n p e nto y tm eS ud fLo Fr qu nc cl to fHy o t r i eS e d Co r lS se l i w e y tm n Po rS se
ZHOU Yih a ZHU e —u , W i
(l tcl n I omai E gnei D p r no C agh n esyoS i c a dTcnl y h nsa 104 C i ) Ee r aa d n r t n n i r g e at tf hnsaU i ri f ce e n ehoo , ag h 4 00, hn ci f o e n me v t n gC a
E iy u - o@f m i D ma:i az u o al m l h h x . c
.
Ke r s h d o t r i e g v r o ; e a v d mp n o q e lw- e u n yo cl t n p we s s m y wo d : y r - bn ; o en r n g t e a igtr u ;o f q e c s i ai s u i r l o i o r yt n e
h t t a yc u et e o r y tm e o a r v nn g t ed mpn , ihma c t oms f o fe u n y ma a s we s h p s e t b c mewe ko e e ai a i g whc yo cl t f r lw-rq e c o e v r wo o o cl t n n g t ea dr s n n eo cl t n Re u t o tea ay i i efe u n y d ma n med man s lt n s i a o : e ai n o a c s i a o . s l f n l ss t q e c o i a dt o i i ai l i v e li s h h r n n i mu o h v e n v r e . s a c da ay i i p a t a in f a c r u p e s n o lw e u n yo cl t n a e e ei d Ree rh a l s r c c l g i c ef p rs i f o f q e c s i a o b i f n n ss i s in o s o r li
汽轮机组参与电力系统低频振荡的机理与抑制措施
统 低 频 振 荡 的 具 体 措 施 , 包括 优 化 控 制 逻 辑 ,严 格 试 验 测 试 等 ,建 议 要 重 视 网 源 协 调 工 作 .提 高 电 网 安 全 稳
定 运 行 水平
关键 词 : 汽轮 机 ;渊 速 系统 ; 电 力 系 统 ;低 频 振 荡 ;流 量 特 性 :一 次 捌 频
力 系 统 低 频 振 荡 事 件 巾 , 只 有 7次 与 电 刚 刺 阻 尼 、
I f I_ ] = _ = 其 振 频 最 低 . 易 成 乃 超
低 频 振 荡 的 来 源 . 分 析 汽 轮 机 组 对 低 频 振 荡 的 影 I 响, 、 迈 从 频 率 模 态 周 期 电 低 频 振 荡 摸 态 周 期
动 态特 V 2 - 决 定 . 『 5 H 比 受 州 速 系 统 PI D 参 数 影
H 前 采 取 的 辛 受 眦 埘 卅 施 足 铒 机 组 发 装 电 力
系 统 稳 定 ( WP r s v s t e n 1 s t a bi l i z e r' P SS) PS S正 常 投 川
中 图 分类 号 :T M7 l 2 文 献 标 志 码 :A DOI:1 0 . 1 】 9 3 0 / j . j s s n . 1 0 0 4 — 9 6 4 9 . 2 0 1 6 . 1 2 , 0 91 . 0 5
0 引言
电 力 系 统 低 频 振 荡 ( 1 o w f T ( 1 u e m. v( 川a n,
I FO ) 足 电 乃系统 存 受 到 l : 扰 时 发 生 的 一 种 功 角 稳
整 就 以 避 免 或 快 速 息 部 分 电 力 系 统 低 顿 振 荡 .
但 这 些 卅 施 没 自‘ 引 起 足够 n 勺匿
汽轮机高导管低频振动治理方法技术研究及应用
《装备维修技术》2020年第18期—261—4K 的屏幕上展示威胁态势;此外天眼分析平台支持对告警进行深度分析,支持以告警字段进行狩猎分析及可视化展示,以攻击链的视角还原告警中的受害主机被攻击的整个过程;最后,对于判定为威胁事件的告警,分析平台提供自定义编排流程进行相应的处置指令下发。
分析平台承担对所有数据进行存储、预处理和检索的工作,由于传统关系型数据库在面对大量数据存储时经常出现性能不足导致查询相关数据缓慢,天眼分析平台底层的数据检索模块采用了分布式计算和搜索引擎技术对所有数据进行处理,可通过多台设备建立集群以保证存储空间和计算能力的供应。
结合全包存储系统,分析平台可以实现针对精确告警的全包取证分析和自定义数据包分析能力。
威胁情报威胁情报来自安全厂商云端的分析成果,可对APT 攻击、新型木马、特种免杀木马进行规则化描述。
安全厂商依托于云端的海量数据,通过基于人工智能自学习的自动化数据处理技术,依靠以顶尖研究资源为基础的多个安全研究实验室为未知威胁的最终确认提供专业高水平的技术支撑,所有大数据分析出的未知威胁都会通过专业的人员进行人工干预,做到精细分析,确认攻击手段、攻击对象以及攻击的目的,通过人工智能结合大数据知识以及攻击者的多个维度特征还原出攻击者的全貌,包括程序形态,不同编码风格和不同攻击原理的同源木马程序,恶意服务器(C&C)等,通过全貌特征‘跟踪’攻击者,持续的发现未知威胁,最终确保发现的未知威胁的准确性,并生成了可供天眼系统使用的威胁情报。
3 结果与结论本文设计了提出了一种多源安流量志采集方法。
在流量源采集方面,采用标准的Syslog 协议,对Linux 和Windows 主机日志,Apache、Weblogic、IIS、Tomcat、Nginx 等主流Web 服务访问日志,以及交换机和防火墙等网络设备流量和网络行为流量等多源异构日志的进行统一采集;在流量源控制方面,采用访问控制技术,能够在不影响其他日志源采集的条件下,动态新增、删除和修改日志源配置;在采集方法上,采用集群式架构设计,当一个采集节点出现故障或性能出现瓶颈时,能够动态调配负载,保障海量流量数据采集的可靠性和实时性。
分析电力系统低频振荡的汽轮机控制系统模型
分析电力系统低频振荡的汽轮机控制系统模型张毅超;徐衍会【摘要】汽轮机控制系统引发了多起电网低频振荡事件,需要在分析低频振荡时考虑汽轮机控制系统模型.在对单元机组及其负荷控制系统的组成进行分析的基础上,给出了协调控制系统、汽轮机数字电液控制系统的数学模型;在对阀门结构、控制方式和流量特性进行分析的基础上,给出了考虑阀门流量特性的汽轮机模型.【期刊名称】《广东电力》【年(卷),期】2013(026)012【总页数】5页(P9-12,52)【关键词】低频振荡;协调控制系统;数字电液控制;阀门流量特性【作者】张毅超;徐衍会【作者单位】广东电网公司电力科学研究院,广东广州510080;华北电力大学电气与电子工程学院,北京102206【正文语种】中文【中图分类】TM712电力系统低频振荡是指频率在0.2~2.5 Hz范围内的功率振荡现象。
重负荷、高放大倍数快速励磁系统往往是导致系统发生低频振荡的原因,电力系统稳定器(power system stabilizer,PSS)的广泛采用使这类低频振荡现象得到了有效抑制。
然而,电力系统中多次出现汽轮机控制系统引发的低频振荡。
如2008年4月21日云南电网某电厂汽轮发电机组在单阀切顺阀过程中发生了功率波动[1],虽然已投入PSS,但是电网仍发生低频功率振荡[2]。
2011年9月24日广东电网某电厂由于机组协调控制系统参数设置不合理,导致电网出现低频功率振荡。
可见,在分析电力系统低频振荡时,除了考虑发电机及其励磁调节器的影响外,还应该计及汽轮机及其控制系统的作用。
在以往的低频振荡研究中,一般忽略原动机功率变化,这对于采用老式调速系统的汽轮机机组而言是可以的。
随着数字电液控制系统(digital electro-hydraulic control system,DEH)的广泛应用,调速系统的响应速度越来越快,已经能够对低频振荡做出响应。
因此,在分析低频振荡时需要考虑原动机调速系统的影响。
汽轮机组参与电力系统低频振荡的机理与抑制措施
0 引言电力系统低频振荡(low frequencyoscillation,LFO)是电力系统在受到干扰的情况下发生的一种功角稳定性问题,通常表现为有功功率的等幅或衰减振荡,功角也同频率振荡,如振荡幅值不断增加,将会导致电力系统的崩溃。
1964年,美国西北电网与西南电网联合试运行时,在其联络线上发生了频率为0.1Hz的持续功率振荡;1984年,我国广东电网与香港电网联合运行时也出现了低频振荡[1]。
随着电力系统网架结构的不断演化,大规模远距离输电、高增益快速励磁等新技术得到广泛应用,我国电力系统低频振荡事件已多次发生,目前采取的主要应对措施是给每台机组安装电力系统稳定器(power systemstabilizer, PSS)。
然而,近年来国内多台机组在PSS正常投用的情况下,仍然发生了低频振荡事故。
据南方电网的初步统计[2],2008年到2012年间发生的15次电力系统低频振荡事件中,只有7次与电网弱阻尼、PSS或励磁系统故障有关,而原动机自身缺陷导致的低频振荡却占了8次,其中多台大型汽轮发电机组的缺陷诱发了这些低频振荡现象。
之前的一般观点认为,与电力系统相比,汽轮机及其调速系统反应较慢,难以诱发电力系统的低频振荡,但对数起低频振荡现象分析结果表明,汽轮机组参与甚至主导了这些低频振荡现象,这与汽轮机数字电液控制系统(DEH)调节速度增快密切相关[3]。
实践表明,通过对机组运行状态或控制参数的调整就可以避免或快速平息部分电力系统低频振荡,但这些措施没有引起足够的重视。
本文结合当前研究成果,从机理与抑制等方面阐述汽轮机组对低频振荡的影响,为从发电厂侧抑制电力系统低频振荡提供参考。
1 低频振荡的分类根据振荡的周期不同,电力系统低频振荡可分为低频振荡和超低频振荡,前者频率一般在0.2~2.5Hz之间,超低频振荡频率一般在0.1Hz以下,由原动机调速系统在调节过程中向电网引入的超低频振荡也被称为频率模态[4],它由调速系统自身动态特性决定,其阻尼比受调速系统PID参数影响较大。
汽轮机调速系统低频振荡特性与抑制策略研究

汽轮机调速系统低频振荡特性与抑制策略研究
刘宗强
【期刊名称】《中国新技术新产品》
【年(卷),期】2024()7
【摘要】本文研究汽轮机调速系统低频振荡特性与抑制策略,保证汽轮机调速系统的稳定性。
分析汽轮机调速系统低频振荡的共振原理,探究其低频振荡特性;汽轮机调速系统控制模型,对低频振荡进行控制;基于改进蚁狮算法的GPSS参数优化流程,找出最优GPSS配置参数,便于从汽轮机调速侧快速抑制振荡。
试验表明,该方法能够增强汽轮机调速系统阻尼特性,快速抑制转子角速度偏差幅度,提高汽轮机调速系统稳定性。
【总页数】4页(P49-52)
【作者】刘宗强
【作者单位】兰州新区化工热电有限公司
【正文语种】中文
【中图分类】TM712
【相关文献】
1.汽轮机调速系统对电网低频振荡的影响
2.汽轮机调速系统中影响电力系统低频振荡的关键因素
3.汽轮机调速系统引起电力系统共振机理低频振荡扰动分析
4.汽轮机调速系统抑制低频功率振荡的仿真研究
5.汽轮机侧机网耦合系统低频振荡特性与抑制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。
汽轮机阀门控制方式切换引发低频振荡的实例及其机理分析
汽轮机阀门控制方式切换引发低频振荡的实例及其机理分析摘要:汽轮机阀流量特性是重要的因素,影响电力系统的稳定性,汽轮机及其调速系统通过建立电网发电机的数学模型,励磁系统,研究汽轮机调节阀流量特性对电网安全稳定的影响机制。
数学分析和仿真结果表明,当涡轮阀的流动特性不佳时,原动力的主动功率波动较大。
针对这一现象,提出了涡轮调节系统的调整控制策略,该策略可以抑制比例的功率控制方式、积分型、微分控制器的过度调节,有效地增加了系统的阻尼,抑制了原动机的功率波动。
关键词:汽轮机;阀门控制;低频振荡;机理分析1前言在汽轮机驱动的动力装置中,汽轮机的性能和状态是保证机组安全、经济运行的关键。
近年来,对多家火电厂的调查发现,涡轮阀的故障已经发生,严重影响了发电机的安全性和经济性。
故障的主要表现是:在涡轮转动后,阀门不受操作者指令的控制。
阀门被卡在一个不能移动的地方;电磁阀芯或金属丝包燃烧。
由于汽轮机阀故障经常发生在单位和发电过程中,故障因素,寻找困难的故障点,故障处理需要更长的时间,不仅浪费燃料,也导致延迟的并网发电和功率降低,故障严重时可能访问单位由于阀门失控,汽轮机转速的重大事故。
因此,开发一个系统来自动诊断汽轮机阀门的隐患是势在必行的。
2诊断系统的实现基于DCS系统的数据收集和分析的历史数据,诊断策略设计、编程和配置,实现功能的诊断汽轮机阀状态,分析和判断汽轮机阀门,报告故障点,提高汽轮机阀的可靠性和可维护性。
诊断系统的故障诊断为主,辅以测试和智能等功能维护,状态监测,数据分析,电磁阀测试,止回阀,国家历史回忆各种方式如声、光报警,故障点,故障判断,为早期发现和准确诊断故障隐患点,引导错误的地方。
2.1故障诊断系统的核心部分是故障诊断功能,数据源分为实时数据和历史数据。
实时数据分析是基于DCS系统的数据采集功能,在线收集电气阀门状态信息(包括开阀指令、阀位反馈、蒸汽压力、蒸汽流量、当前负载和其他重要参数),通过DCS系统逻辑编程,可以初步诊断当前阀门的性能和操作状态是正常的,诊断结果显示,如果不正常,程序,立即发出相应的声光点故障报告给警察。
发电厂汽轮机低频振动的原因及解决办法 朱青海
发电厂汽轮机低频振动的原因及解决办法朱青海发表时间:2018-01-31T10:26:24.393Z 来源:《基层建设》2017年第32期作者:朱青海[导读] 摘要:通过在线监测系统,该机组高中压转子都存在低频振动的现象,而且有越来越严重甚至有超过运行规程规定值的趋势,已经到了不得不停机检修的状态,通过这次检修,有必要对机组低频振动的现象、产生的原因以及机理进行深入的探索总结,这将对今后的工作产生积极的影响。
苏州热工研究院有限公司广东深圳 518124摘要:通过在线监测系统,该机组高中压转子都存在低频振动的现象,而且有越来越严重甚至有超过运行规程规定值的趋势,已经到了不得不停机检修的状态,通过这次检修,有必要对机组低频振动的现象、产生的原因以及机理进行深入的探索总结,这将对今后的工作产生积极的影响。
关键词:发电厂;汽轮机;低频振动;原因;分析1导言长期生产实际证明,长时间的低频振动会对汽轮机本体产生难以估计的损坏,较大的振幅甚至会对汽轮机轴瓦造成严重损坏,因此,对于汽轮机专业技术人员,研究掌握振动出现的原因并且深入研究其控制方法是有积极意义的,可以防患于未然,避免发生汽轮机损坏的严重事故。
2汽轮机概述公元1世纪,亚历山大的希罗记述的利用蒸汽反作用力而旋转的汽转球,又称为风神轮,是最早的反动式汽轮机的雏形。
1629年,意大利的Gde布兰卡提出由一股蒸汽冲击叶片而旋转的转轮。
1882年,瑞典的C.G.Pde拉瓦尔制成第一台5马力(3.67千瓦)的单级冲动式汽轮机。
19世纪末,瑞典拉瓦尔和英国帕森斯分别创制了实用的汽轮机。
拉瓦尔于1882年制成了第一台5马力(3.67千瓦)的单级冲动式汽轮机,并解决了有关的喷嘴设计和强度设计问题。
单级冲动式汽轮机功率很小,已很少采用。
20世纪初,法国拉托和瑞士佐莱分别制造了多级冲动式汽轮机。
多级结构为增大汽轮机功率开拓了道路,已被广泛采用,机组功率不断增大。
帕森斯在1884年取得英国专利,制成了第一台10马力的多级反动式汽轮机,这台汽轮机的功率和效率在当时都占领先地位。
汽轮机调速系统对电网低频震荡的影响
汽轮机调速系统对电网低频震荡的影响摘要:之前,普遍的观点是,与电力系统相比,汽轮机及其调速系统响应缓慢,难以引起电力系统的低频振荡,但一些低频振荡现象的分析结果表明,汽轮机组参与甚至主导低频振荡现象,与汽轮机数字电液控制系统(DEH)密切相关的快速调整。
针对这一现象,本文深入分析了调速系统对电力系统动态稳定性的影响。
关键词:汽轮机;调速系统;电网低频震荡;影响1、前言根据振荡的周期不同,电力系统低频振荡可分为低频振荡和超低频振荡,前者频率一般在0.2~2.5Hz,超低频振荡频率一般在0.1Hz以下,由原动机调速系统在调节过程中向电网引入的超低频振荡也被称为频率模态,它由调速系统自身动态特性决定,其阻尼比受调速系统PID参数影响较大。
理论计算分析表明,火电厂动力系统与电力系统低频振荡存在一定的相关性,其中汽轮机跟随控制方式由于其共振频率最低,易成为超低频振荡的来源,分析汽轮机组对低频振荡的影响应当从频率模态周期和电网低频振荡模态周期两个时间尺度上进行。
2、汽轮机调速系统对低频振荡的影响包含汽轮机调速系统的单机无限大系统框图如图2所示。
表1 系统特征值计算结果由表1可知,当KP取0时电力系统振荡频率为0.95Hz,等于自然振荡频率。
当KP增大时,电力系统振荡频率逐渐升高,在低于分界频率的范围内调速系统提供正阻尼,且阻尼有所改善。
当KP为5.0时,电力系统振荡频率为1.138Hz,已经超过分界频率,此时调速系统开始提供负阻尼,系统总阻尼开始下降。
KP增大到使总阻尼为0的值称为临界增益,当调速系统增益超过临界增益时,扰动下发生增幅振荡。
需指出的是电力系统的低频振荡频率主要取决于由所研究的电力系统的参数决定的同步转矩系数Ks,汽轮机调节系统只能在较小的范围内改变系统的振荡频率,而非起决定性作用。
电网中某些参数的变化,也会导致系统振荡频率的改变,从而引起汽轮机调节系统阻尼特性的变化。
3、从汽轮机侧抑制电力系统低频振荡从目前已发生的多起低频振荡事件看,汽轮机配汽方式切换、汽轮机汽门活动性试验、一次调频回路投入、阀门开度晃动以及外界干扰等操作或异常都有可能诱发电力系统低频振荡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
低频振荡时的汽轮机调速控制方式在线调整策略竺 炜1,2,谭 平1,周孝信2(1.长沙理工大学电气与信息工程学院,湖南省长沙市410114;2.中国电力科学研究院,北京市100192)摘要:现场运行证明,若汽轮发电机组发生低频振荡,则可尝试改变调速系统控制方式以抑制振荡。
已有研究表明,若电网侧的低频电功率振荡扰动引起机械功率共振,会使转子角振幅大幅增加。
因此,分析了汽轮发电机组调速系统在串级比例—积分(PI)和2种单级PI控制方式下的阻尼特性和频率特性,提出了控制方式的调整策略,以避开共振频率点。
仿真表明,发生共振时,通过调整调速系统的控制方式,能有效地降低转子振幅。
该方法依托调速系统的现有功能进行低频振荡抑制,便捷有效且能在线调整,对系统的稳定运行具有现实意义。
关键词:低频振荡;共振频率;数字电液控制;阻尼;频率特性收稿日期:2010-12-29;修回日期:2011-04-15。
国家自然科学基金资助项目(61040049);湖南省科技计划项目(2010FJ4095)。
0 引言随着电力系统互联规模的增大,低频振荡的问题越来越突出。
电力系统低频振荡主要是机电模式的振荡。
文献[1]发现励磁系统有可能削弱机组的阻尼转矩,甚至导致阻尼转矩为负。
因此,负阻尼机理广泛应用于低频振荡分析和抑制方法研究[2-7]。
但是,在系统实际运行中还存在负阻尼机制无法解释的低频振荡现象,如文献[8]所述中国河北南网安保线上多次发生的等幅低频振荡。
由此,文献[8-9]提出了低频振荡的共振机理。
文献[10-11]分析认为,原动机侧的外界振荡扰动与系统固有频率接近或相同时会引起共振。
文献[12]发现,当电网侧出现扰动时,由于汽轮机组功率—频率调节采用机端有功信号,因此,实际控制方式由反馈变为前馈方式[13],使机械功率阻尼降低并出现共振频率点。
当电网侧振荡扰动接近共振频率时,会引起汽轮机组机械功率大幅振荡,进而引起低频振荡。
在发电机稳定控制方面,虽然各种新理论的研究很多,但实际应用并不理想。
在励磁侧配有电力系统稳定器(power system stabilizer,PSS)后,若仍然发生低频振荡,现场可采用降出力的办法。
但该办法抑制振荡耗费时间长,且会改变系统运行方式,容易导致系统解列。
此外,现场运行经验表明,改变控制方式、系统结构和参数可能使振荡平息。
文献[14]阐述了某厂在发生低频振荡时,通过改变调速系统控制方式,将闭环控制改为开环控制,使振荡平息的过程。
为保证发电机的稳定性,一些发电厂甚至在正常运行时,也将调速控制系统的反馈回路断开,不将一次调频功能投入[15]。
其实,每种控制方式都有其控制目的。
功率反馈、频率反馈和压力级反馈对保证一次调频和二次调频精度、线性度和及时性都有作用。
只有通过对每种控制方式的阻尼特性和频率特性进行分析,才能在改变系统控制方式以抑制低频振荡时,做到有的放矢。
因此,本文对汽轮机组调速系统的3种控制方式进行了阻尼特性和频率特性分析,提出了控制方式在线调整策略,以便有效地抑制低频振荡。
1 数字电液调速系统的控制方式一次调频要求汽轮机具有快速功率响应特性和较好的功率—频率线性调节特性。
故现代大型机组调速系统普遍采用数字电液(DEH)调速控制系统。
近代高参数大容量机组普遍采用单元制中间再热,调速控制系统增加了调节级压力反馈控制回路和功率反馈控制回路,并结合前馈比例—积分(PI)校正[16-18],以使汽轮机输出功率能准确、快速地跟随给定值。
但由于现实中汽轮机机械功率Pm测量困难,一般采用发电机出口有功功率Pe代替[17-18]。
控制系统原理如图1所示[16]。
图中,ωr为转速设定值,ωm为转速实际输出值。
图1中,汽轮机转速为主被调量,调速级压力为副被调量。
频差放大器、发电机有功调节器和PI1控制器构成主控制回路,调速级压力调节器和PI2控制器构成副控制回路。
实际运行中,系统的虚拟开关由软件实现,开关K1和K2的指向可提供不同的运行方式,即K1与—78—第35卷 第14期2011年7月25日Vol.35 No.14July 25,2010图1 汽轮机数字电液调速系统结构Fig.1 Structure of turbine digital electro-hydraulic control systemK2全部闭合,为串级PI控制方式;K1闭合而K2断开,为单级PI1控制方式;K1断开而K2闭合,为单级PI2控制方式。
2 避开共振频率点的控制思路以上控制方式从热工控制的角度出发,主要控制目标是使汽轮机输出功率和转子频率跟随给定值。
为与负荷平衡,考虑了有差调节。
但是,从电力系统稳定运行的角度,则要求汽轮机输出机械功率能及时跟随电网侧负荷的变化。
当系统负荷变化时,先造成发电机有功功率的变化,然后因机械功率和电功率不平衡才引起转速变化。
所以,此时调速系统中的Pe成为前馈输入信号而不是反馈信号,Pm随其变化而变化[12,14]。
若电网侧某扰动源引起的低频振荡传递到机端,使机端Pe低频振荡,由于控制方向改变,ΔPe有可能通过调速系统激起汽轮机ΔPm共振(ΔPm是ΔPe的几倍振幅),使转子的不平衡力振荡力矩迅速增大,转子大幅振荡[12]。
造成这种情况的原因是Pe→Pm控制方向的共振频率与扰动频率接近或相同。
在抑制上述机理的低频振荡时存在2个问题:为满足二次调频功能以及一次调频静态调节特性,不宜改变调速系统原有的结构;另外,为保持正常的一次调频静态调节特性和抗高频干扰,电功率测量回路设计成低通信道,即无法阻止低频振荡信号进入前馈通道。
为此,本文的思路是:通过改变DEH调速系统的控制方式,来改变Pe→Pm控制方向的系统机构和特征值,从而改变共振频率点,避免ΔPm和ΔPe共振。
由于调速级压力和机端ΔPe都是副被调量,故可通过开关K1和K2的闭合改变辅助控制方式,从而改变Pe→Pm的特征值及固有频率。
同时保留了原有的闭环“调速”功能。
下面,分别依托简化模型和典型模型,对串级PI、单级PI1和单级PI2这3种控制方式的阻尼特性和频率特性进行分析,研究共振频率的分布特点,以便振荡时采取合适的控制方式。
3 简化模型的阻尼和频率特性分析3.1 串级PI控制系统的阻尼和频率特性分析根据图1,汽轮机DEH控制系统的简化系统如图2所示。
图2 串级控制系统结构Fig.2 Cascade control system图中:Gc1(s)=Kp1和Gc2(s)=Kp2分别为主、辅控制器,为降低回路阶数,只使用比例环节;Gv(s)=Kv,为伺服系统;GCH(s)=1/(1+TCHs),为高压容积;GRH(s)=1/(1+TRHs),为再热与低压容积;Gσ(s)=1/(Tσs),为转子模型;ΔPe为电功率扰动;ΔPm为机械功率输出。
令GO=Gc2GvGCH1+Gc2GvGCH(1) 以扰动ΔPe为输入,ΔPm为输出。
则有-[(ΔPm-ΔPe)Gσ+ΔPe]Gc1GOGRH=ΔPm(2) 为了直接推导出系统的主要振荡模式,须先进行系统降阶。
因TCH相比于TRH和Tσ较小,可将此环节降阶,即TCH=0。
则将各元件模型代入式(2),得到串级PI控制的简化系统模型为:ΔPm(s)ΔPe(s)=Kp1Km(1-Tσs)TσTRHs2+Tσs+Kp1Km(3)式中:Km=Kp2Kv1+Kp2Kv(4) 可得串级PI控制的系统无阻尼自然频率ωc和阻尼比ζc分别为:ωc=Kp1KmTσT槡RH(5)ζc=12TσKp1KmT槡RH(6)若ζc<槡2/2,则ΔPe和ΔPm的共振频率ωx为:ωx=ωc1-2ζ槡2c=Kp1KmTσTRH-12T2槡RH(7)—88—2011,35(14) 由图2可得:(ΔPm-ΔPe)1Tσs=Δω(8)将式(3)代入式(8),可得ΔωΔPe=-TRHs-(Kp1Km+1)TσTRHs2+Tσs+Kp1Km(9) 由式(3)和式(9)可见,Δω与ΔPm具有相同的自然频率、阻尼比和共振频率。
以上分析表明,若ζc<槡2/2,则存在共振频率ωx。
在该频率的ΔPe扰动下,汽轮机机械功率ΔPm会因共振而增大,进而引起转速振荡Δω增大。
3.2 单级PI1控制系统的阻尼和频率特性分析图1中,当只有PI1控制器起作用时,得到图3所示单级PI1控制系统,其他环节与串级PI控制系统相同。
图3 单级PI1控制系统结构Fig.3 Structure of single loop PI1control system以扰动ΔPe为输入,ΔPm为输出。
则有-[(ΔPm-ΔPe)Gσ+ΔPe]Gc1GvGRHGCH=ΔPm(10) 近似令TCH=0,将各元件模型代入式(10),得到单级PI1控制的简化系统模型为:Pm(s)Pe(s)=Kp1Kv(1-Tσs)TσTRHs2+Tσs+Kp1Kv(11) 由式(11)可知,单级PI1控制的系统无阻尼自然频率ωc1和阻尼比ζc1分别为:ωc1=Kp1KvTσT槡RH(12)ζc1=12TσKp1KvT槡RH(13)若ζc1<槡2/2,则ΔPe和ΔPm的共振频率ωx1为:ωx1=ωc11-2ζ2c槡1=Kp1KvTσTRH-12T2槡RH(14) 同理,可证明该控制方式下Δω与ΔPm具有相同的自然频率、阻尼比和共振频率。
3.3 单级PI2控制系统的阻尼和频率特性分析图1中,当只有PI2控制器起作用时,得到图4所示单级PI2控制系统,其他环节与串级控制系统相同。
图4 单级PI2控制系统结构Fig.4 Structure of single loop PI2control system 以扰动ΔPe为输入,ΔPm为输出。
则有-(ΔPm-ΔPe)GσGOGRH=ΔPm(15)则以扰动Pe为输入,Pm为输出的闭环传递函数为:ΔPm(s)ΔPe(s)=KmTσTRHs2+Tσs+Km(16) 故单级PI2控制的系统无阻尼自然频率ωc2和阻尼比ζc2分别为:ωc2=KmTσT槡RH(17)ζc2=12TσKmT槡RH(18)若ζc2<槡2/2,则ΔPe和ΔPm的共振频率ωx2为:ωx2=ωc21-2ζ2c槡1=KmTσTRH-12T2槡RH(19) 同理,可证明该控制方式下Δω与ΔPm具有相同的自然频率、阻尼比和共振频率。
3.4 3种控制方式的阻尼和频率特性比较分析现比较分析3种控制方式的阻尼比。
由式(7)、式(13)和式(18)可得:ζc2>ζc>ζc1(20)由线性单自由度系统的强迫阻尼振荡理论可知,阻尼比必须小于槡2/2才有共振频率,且振幅放大倍数随阻尼比变小而增大。
因此,从阻尼角度,单级PI1控制最容易出现共振,且振幅比最大,单级PI2控制最不容易出现共振,且振幅比最小,串级PI控制居中。