机器人外部自动配置方法
ABB机器人【 配置设定】大全 , 人手一份,建议永久收藏!
ABB机器人【配置设定】大全 , 人手一份,建议永久收藏!功能介绍指南车机器人致力于工业机器人自动化应用服务,专注工业机器人应用工程师(电气设计与调试、机械设计、技术营销、离线仿真、视觉、项目方案、高级编程)等培训,与机友们分享技术干货及行业动态。
本公众号由杭州指南车机器人科技有限公司维护运营!限时下载|ABB、FANUC机器人的全套学习资料1一、如何配置ABB机器人Profinet从站1、机器人需要有888-2或者888-3选项(使用控制器网口),或者840-3选项(使用Anybus网口)2、此处举例888选项3、机器人控制器有如下网口,其中:X2 是服务端口,ip固定192.168.125.1X3连接了示教器X7连接了安全板X9连接了轴计算机 4、Profinet可以连接WAN口或者LAN3口,根据设置连接5、此处举例连接WAN口6、控制面板,配置,主题选择communication7、进入IPSETTING8、点击ProfinetNetwork9、修改ip并选择对应网口 10、重启11、控制面板,配置,主题I/O ,PROFINET InternalDevice12、配置输入输出字节数。
和PLC那边设置一致13、配置界面下,进入Industry Network,PROFINET14、设置station名字,这个名字要和PLC端对机器人的station设置一样15、添加signal,device选择profinetInternal device2二、ABB机器人IO接线与配置1、以DSQC652为例(16进16出)2、上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来3、下部区域为16个输入点,9号针脚的0v需要从XT31引过来4、左侧区域短接片为地址位,默认为10,如下图(剪掉的为1,留下的是0,高电平有效)。
如果要修改板卡地址,在这里修改,机器人里也要做对应配置5、6、控制面板,配置,找到devicenetdevice,添加(如果已经显示添加,则不需要再添加)7、模板选择652,地址根据前面短接片设置,默认为108、确定后,暂时不重启,全部配置完再一起重启9、进入Signal,点击添加10、举例,一个输出设置如下设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。
关于Step7与KUKA库卡机器人外部自动启动配置总结

初始化 检查是否在原点
机器人回原点轨迹
等待PLC程序启动信号
调用1号程序
调用2号程序
调用3号程序
27th August 2014
17
六、PLC程序-机器人控制功能块配置
关键词: • Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
27th August 2014
3
3
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
27th August 2014
24
六、PLC程序-机器人控制功能块配置
机器人自动启动使能条件 机器人报警和线体报警反馈
机器人急停安全回路控制
机器人区域安全 安全回路控制
27th August 2014
25
六、PLC程序-机器人控制功能块配置
通过PLC外部自动启动机器人,上述控制能块介绍的引脚信号都是机器人控制和外部启动的必要条 件,缺一不可,至于输出,这里不做介绍,主要是给PLC内部逻辑编写和状态显示使用。 除了上述PLC对机器人控制块的配置信号外,机器人外部自动启动信号交换还需要其它前提条件
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18
六、PLC程序-机器人控制功能块配置
(完整版)KUKA机器人外部自动配置方法
机器人外部自动启动配置方法•不通过程序号而选定好要运行的程序的外部启动机器人通过下列步骤来外部启动机器人:步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
•通过程序号(不校验奇偶)来选定程序的外部启动机器人。
需要配置的信号:PRNO_FBIT:表示位字节的第一位。
例如,用$IN[11] ---$IN[17]来映射给变量PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时PGNO_LENGTH为7,变量PGNO最大值为127.PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话该值设置为0.PGNO_VAILD:程序号有效,机器人信号输入端的位信号。
把位信号编号编写在其后面,如,用$IN[18]来表示此程序号有效的话,当$IN[18]为TRUE的时候,PLC发过来的程序号才有效。
PGNO_VAILD是个脉冲信号(脉宽1秒左右)。
每次改变程序号时,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO的值不会发生改变。
PGNO_REQ:机器人发给PLC的程序号请求信号,位信号。
OTC机器人配置教程 2019-8-13

目录一、接线 (2)1.1电源接线 (2)1.2安全回路接线 (3)1.3通信板卡 (3)1.4碰撞传感器接口短接 (4)二、系统文件 (5)2.1拷贝PLC文件到示教器 (5)2.2 运行拷贝的PLC文件 (6)2.3 机器人与博途的变量对应 (7)三、其他设置 (11)3.1原点位置设置 (11)3.2 示教模式时无法输出变量 (12)3.3再生模式下外部自动需要的信号 (12)3.4 操作权限变更 (13)3.5 通信设置 (13)3.6切换为再生模式 (14)3.7外部自动只运行示教器选中的程序及相关设置 (15)3.8 内部自动运行示教器程序及设置 (16)3.9 示教器监视器的使用 (17)3.10 运行速度问题 (18)一、接线1.1电源接线OTC机器人自带变压器(380V AC-200V AC),故OTC机器人前端的断路器需要用D型。
配电箱到OTC变压器以及变压器到机器人控制柜的电源线缆需要我们自己做。
其他线缆(网线,急停回路线缆等)从控制柜后面开孔进入,没有航插。
1.2安全回路接线TBEX1:为输入端。
将1和2,3和4分别接到安全回路两个继电器的常开触点即可。
其他引脚不用管TBEX2:为输出端。
将1和2,3和4分别串联接入急停按钮的两个回路(注意正负)。
其他引脚不用管1.3通信板卡机器人控制箱内有3个通信板卡插槽,从左往右1-3编号,一般默认将通信板卡插入1号卡槽,PN通讯网线从通信板卡接到交换机中。
1.4碰撞传感器接口短接若示教器手动移动机器人后出现以下报警:解决办法:1.将机器人以下接口用线短接即可。
2.机器人控制箱内有个短接板卡,将短接板卡插到CNMCH插槽即可。
(推荐使用,没短接版时才用第一种方法)二、系统文件注:OTC机器人默认是弧焊版,购买时最好让供应商升级到激光版2.1拷贝PLC文件到示教器将装有PLC系统文件的U盘插入机器人控制柜(若插到示教器可能找不到对应的文件),从U盘将对应的两个文件拷贝到示教器内部存储器---PLC文件夹中。
KUKA机器人外部自动配置
KUKA机器人外部自动配置关键信息项:1、机器人型号:____________________2、外部自动配置功能描述:____________________3、配置所需硬件设备:____________________4、配置软件及版本:____________________5、配置实施时间:____________________6、验收标准:____________________7、维护与支持期限:____________________8、费用及支付方式:____________________1、协议概述11 本协议旨在规范和明确关于 KUKA 机器人外部自动配置的相关事宜,确保配置工作的顺利进行和各方权益的保障。
2、机器人及配置要求21 明确所需配置的 KUKA 机器人型号及相关技术规格。
211 详细说明机器人的工作环境和任务需求。
212 阐述对机器人运动范围、精度、负载能力等方面的要求。
22 外部自动配置功能的详细描述221 包括但不限于自动感知、自动路径规划、自动执行任务等功能。
222 说明各功能的实现方式和预期效果。
3、配置所需硬件设备31 列出所需的传感器、控制器、执行器等硬件设备的品牌、型号和数量。
311 对硬件设备的性能参数和兼容性进行说明。
312 规定硬件设备的安装位置和连接方式。
4、配置软件及版本41 明确使用的配置软件名称、版本及相关授权信息。
411 描述软件的功能模块和操作流程。
412 说明软件与硬件设备的集成方式和接口规范。
5、配置实施51 确定配置工作的开始时间和预计完成时间。
511 制定配置工作的进度计划,包括各个阶段的时间节点和工作内容。
512 规定双方在配置实施过程中的责任和义务。
52 配置过程中的测试与调试521 制定测试方案和测试用例,确保配置后的机器人性能符合要求。
522 对测试过程中发现的问题进行及时调试和解决。
6、验收标准61 明确验收的依据和标准,包括功能指标、性能指标、稳定性指标等。
安川机器人外部IO启动
安川外部IO启动正文:一、安川外部IO启动1.1 引言安川是一种高性能的自动化设备,具有广泛的应用领域。
为了实现的正常运行,需要对外部IO进行启动配置。
本文档将详细介绍安川外部IO的启动步骤和配置要求。
1.2 目的本文档的目的是为操作人员提供安川外部IO启动的参考指导,确保能够正确地连接和实现IO功能。
1.3 适用范围本文档适用于使用安川的用户和维护人员,包括但不限于以下具体应用:工业生产线、装配线、焊接应用等。
二、外部IO启动步骤2.1 硬件准备在启动安川的外部IO之前,需要进行以下硬件准备工作:1) 确保的电源正常连接并接通;2) 将与外部IO设备通过适当的接口进行连接;3) 验证连接线路的稳定性和连接端口的正确性。
2.2 IO配置界面安川提供了用户界面来进行IO的配置。
在控制器上,打开IO 配置界面,并确保界面显示正常。
2.3 IO配置参数设置根据具体应用需求,设置外部IO的参数。
包括输入信号的类型和数量、输出信号的类型和数量、信号的电平范围等。
2.4 检查和测试在完成IO配置参数设置后,进行IO的检查和测试,确保IO信号的正常传输和响应。
可以通过观察的状态、检查IO指示灯或使用示波器等方式进行测试。
2.5 调试和优化根据检查和测试的结果,对于存在的问题进行调试和优化。
可以修改参数设置、调整连接线路、更换IO设备等方式来解决问题。
三、附件本文档附有以下附件供参考:1) 安川外部IO启动配置图表;2) 安川外部IO连接线路图;3) 其他相关配置文件或工具。
四、法律名词及注释1、外部IO:指连接到控制器的输入输出设备,用于与进行信号交互。
2、接口:用于外部IO设备与控制器之间的物理连接和信号传输。
3、参数设置:指根据应用需求和设备规格,对外部IO的各项参数进行配置和调整。
4、检查和测试:用于验证外部IO设备和信号传输的正确性和可靠性。
5、调试和优化:通过修改参数设置、调整连接线路等方式,解决IO信号传输中的问题,达到优化IO的目的。
KUKA机器人外部自动配置方法
KUKA外部自动配置方法[正文]章节一、引言本文档旨在介绍KUKA的外部自动配置方法。
通过该方法,用户可以自动设置和调整的各种参数,以满足特定的应用需求。
本文将详细介绍配置方法的步骤和注意事项。
章节二、配置准备在开始配置之前,需要准备以下工作:1、KUKA软件包2、与连接的计算机3、控制器的IP地质和用户名密码章节三、连接和计算机配置步骤如下:1、将和计算机通过以太网线连接。
2、在计算机上打开网络设置,配置IP地质和子网掩码,确保与处于同一局域网内。
3、确保控制器已开启,并保证用户名密码正确。
章节四、启动KUKA软件1、在计算机上安装KUKA软件包。
2、打开软件,并选择自动配置功能。
章节五、执行自动配置1、在自动配置功能中,选择连接的控制器。
2、开始自动配置按钮,系统将自动识别的型号和参数。
3、根据需要,设置的工作区域、速度、加速度等参数。
4、确认配置无误后,保存设置并退出自动配置功能。
章节六、验证配置结果1、重新启动控制器,确认配置的参数已成功生效。
2、运行简单的程序,观察的动作情况。
3、如有需要,可以通过手动调整参数进行微调。
章节七、安全注意事项在进行外部自动配置过程中,需要注意以下安全事项:1、在配置过程中,确保周围没有人员和障碍物。
2、了解的工作范围和安全边界,避免潜在的危险。
3、遵循KUKA官方的安全操作规范和指导文件。
[附件]本文档附带以下附件:1、KUKA外部自动配置软件包。
2、配置过程中可能用到的示例程序和文件。
[法律名词及注释]1、:指KUKA公司生产的工业,具有自主操作和控制能力。
2、自动配置:指通过计算机软件自动设置和调整的参数和配置。
3、IP地质:指网络中用来标识计算机或网络设备的数字地质。
4、用户名密码:指用来验证用户身份和控制权限的登录信息。
5、软件包:指一组相关软件程序的打包和发布形式。
[结束语]本文档提供了详细的KUKA外部自动配置方法,希望能够帮助用户快速、准确地完成的配置工作。
KUKA机器人外部自动配置
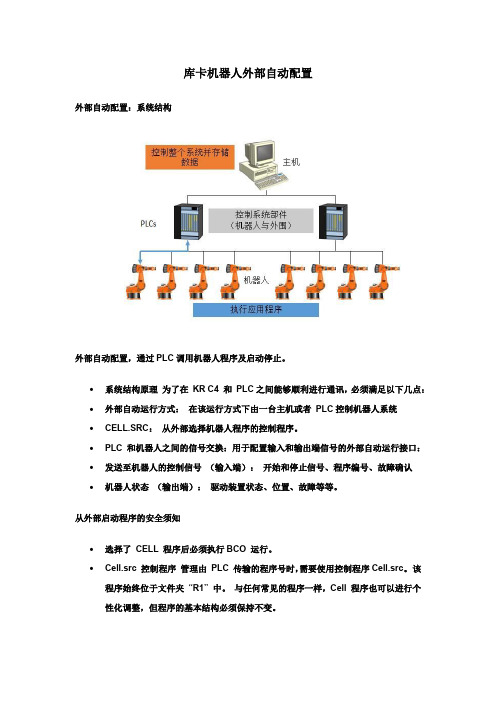
库卡机器人外部自动配置外部自动配置:系统结构外部自动配置,通过PLC调用机器人程序及启动停止。
∙系统结构原理为了在KR C4 和PLC之间能够顺利进行通讯,必须满足以下几点:∙外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统∙CELL.SRC:从外部选择机器人程序的控制程序。
∙PLC 和机器人之间的信号交换:用于配置输入和输出端信号的外部自动运行接口:∙发送至机器人的控制信号(输入端):开始和停止信号、程序编号、故障确认∙机器人状态(输出端):驱动装置状态、位置、故障等等。
从外部启动程序的安全须知∙选择了CELL 程序后必须执行BCO 运行。
∙Cell.src 控制程序管理由PLC 传输的程序号时,需要使用控制程序Cell.src。
该程序始终位于文件夹“R1” 中。
与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:1、初始化和Home 位置∙初始化基坐标参数∙根据“Home” 位置检查机器人位置∙初始化外部自动运行接口2、无限循环:∙通过模块“P00” 询问程序号∙进入已经确定程序号的选择循环。
3 、程序号的选择循环∙根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
∙记录在分支中的机器人程序即被运行。
∙无效的程序号会导致程序跳转至“ 默认的” 分支中。
∙运行成功结束后会自动重复这一循环。
更改CELL•操作步骤:1. 切换到“ 专家” 用户组2.打开CELL.SRC。
3.在“CASE” 段中将名称“EXAMPLE” 用•应从相应的程序编号调出的程序的•名称替换。
删除名称前的分号。
4. 关闭程序并保存更改更改外部自动接口,根据标准填写输入接口信号。
输出信号变量说明∙PERI_RDY 通过设定这个输出,机器人控制器与主计算机通讯驱动器接通的细节ALARM_STOP 在急停情况下复位该输出。
正常一直为1,急停为0 ∙USER_SAF如果安全栅栏监控开关被打开(在AUTO方式下)或使能开关被释放(在TEST方式下)复位该输出。
KUKA机器人外部自动配置方法
KUKA外部自动配置方法KUKA外部自动配置方法1.简介1.1 概述在KUKA应用中,需要进行外部自动配置来实现精确的环境控制和操作。
本文档详细介绍了KUKA的外部自动配置方法,包括安装和配置软件、硬件以及相关设置。
1.2 目的本文档的目的是提供给用户一个完整的指南,以便他们能够正确地进行KUKA的外部自动配置。
通过遵循本文档中的步骤和指导,用户可以准确地配置系统,提高生产效率。
2.硬件准备2.1 系统要求在进行外部自动配置之前,确保系统满足以下要求: - 硬件完好无损- 控制器和连接正常- 所需的传感器和设备已连接到控制器2.2 传感器和设备准备- 确保所有需要使用的传感器和设备已经准备就绪- 检查设备的连接线是否正常,插头是否插紧- 确保设备的电源正常工作3.软件安装与配置3.1 安装KUKA软件- 最新版本的KUKA软件,并按照安装向导进行安装- 确保安装过程中选择了所有需要的组件和插件3.2 配置控制器- 打开KUKA软件,并连接到相应的控制器- 进入控制器设置界面,根据需要配置网络连接、传感器接口和设备驱动4.外部自动配置过程4.1 配置环境参数- 根据实际应用需求,设置操作的环境参数,包括工作空间尺寸、安全区域等4.2 校准传感器- 对于使用的传感器,根据需要进行校准操作,以确保测量精度和准确性4.3 准备操作- 根据实际应用需求,编写操作程序,并进行相关设置4.4 测试与调试- 进行初步测试,验证是否正确执行所需的操作- 如果发现问题,进行适当的调试和错误修复5.附件本文档所涉及的附件包括:- KUKA软件安装包- 控制器设置文档- 外部自动配置操作手册6.法律名词及注释- 外部自动配置:指在应用中通过安装和配置软件、硬件来实现精确的环境控制和操作的过程。
- 传感器:用于测量和检测环境变量的装置或设备,例如距离传感器、力传感器等。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
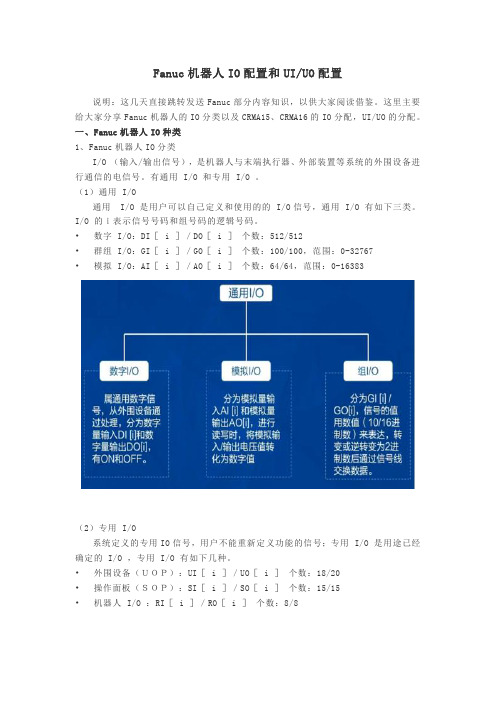
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
松下机器人外部启动连接与设定
松下机器人外部启动连接与设定一、机器人连线1.机器人输入:⑴ 状态输入:将外部启动盒的停止按钮的一端并联至机器人状态输入端口组的 8 号端口(已内部指定停止端口)将机器人状态输入端口组的 7 号端口(内部指定再启动端口)跳线短接至通用输出端口组的 8 号端口(一般指定此端口为选通端口)⑵ 通用输入:将外部启动盒的启动按钮的一端连接至机器人通用输入端口组(八个端口),按启动盒的工位,1 号工位的启动连接至通用输入端口组的 1 号端口,2 号工位联结至 2 号端口,以此类推;将所有外部启动盒的重启动按钮的一端并联至通用输入端口组的 8 号端口(一般接至此端口)。
2.机器人输出:⑴ 状态输出:无连接。
⑵ 通用输出:将机器人状态输入端口组的 7 号端口跳线短接至通用输出端口组的 8 号端口(一般指定此端口为选通端口)3.启动盒连线:将外部启动盒所有按钮(除急停按钮)的一端作为COM 端串联,并将各启动盒COM 端并联接在机器人COM 端的任意端口(4 个端口)。
二、机器人设定(1)接好线后,打开电源。
示教盒处于示教状态;(2)打开机器人菜单栏的“设定”选项,选择控制柜,启动方式;(3)选择“自动方式”,“编号方式”,“信号方式”;(4)选择“配置输入”,确认“1”设定为 1 号端口,“2”设定为 2 号端口,“4”设定为 3 号端口(这里的 1,2,4 是指端口 1,2,3 所对应的程序“Prog0001”,“P rog0002”,“Prog0004”的简写);(5)选择“配置输出”,确认“选通”设定为 8 号端口(通用输出端口组);(6)回到“设定”,选择“I/O”,最后一项“状态输入输出”,在小窗口中找到“外部在启动”,选择并设定为“有效”及8 号端口(通用输入端口组),完成设定。
注:可以编写一些处于工位上的简单动作程序,并肩其通过对应工位的调用程序的“CALL”命令调用,来确认启动盒的连线与设定是否正确。
KUKA机器人外部自动配置
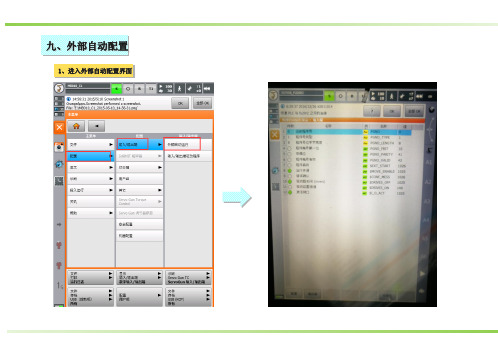
九、外部自动配置
4、输出信号-程序状态配置
程序激活 程序号请求 应用程序正在运行
九、外部自动配置
5、输出信号-机器人位置配置
机器人HO配置
机器人T1 机器人T2 机器人AUT 机器人外部自动
九、外部自动配置
九、外部自动配置
1、进入外部自动配置界面
九、外部自动配置
2、输入信号配置
程序号采用8421码 程序号镜像 程序号位数
程序号起始位 不启用奇偶位校验
程序号有效 程序号有效
运行开通 错误确认 电机下电 电机上电
九、外部自动配置
3、输出信号-启动条件配置
紧急关断环路关闭 操作人员防护装置开着
驱动装置待机状态
6、初始配置信号更改配置
1
2 3
将系统默认的伺服包 内的与外部自动配置 冲突的信号更改掉,
然后编译后导入
发那科机器人外部信号启动

发那科外部信号启动发那科外部信号启动1.引言在使用发那科进行自动化操作时,有时需要通过外部信号来启动的动作。
本文档将详细介绍如何通过外部信号启动发那科,并提供相关的操作步骤和注意事项。
2.硬件配置在开始操作前,确保以下硬件已正确配置和连接:- 发那科:确保已正确安装并接通电源。
- 控制器:确保控制器已正确连接到,并与电源和外部信号源相连。
- 外部信号源:准备一个外部信号源,例如开关、传感器或PLC。
3.软件设置在控制器上进行以下软件设置:1) 打开控制器的用户界面。
2) 进入信号配置界面。
3) 配置外部信号输入端口:指定一个可用的输入端口来接收外部信号。
4) 配置信号触发条件:指定何时触发动作,例如上升沿、下降沿或稳定状态。
5) 配置动作:指定要执行的动作,例如运动到指定位置、抓取物体或释放物体。
4.外部信号启动动作操作步骤以下是通过外部信号启动发那科动作的操作步骤:1) 确保外部信号源已正确连接到控制器的外部信号输入端口。
2) 启动控制器,并进入外部信号配置界面。
3) 检查外部信号源是否正常工作,确保信号源可以触发控制器接收到信号。
4) 配置信号触发条件,确保将在正确的信号触发条件下执行动作。
5) 配置动作,指定将执行的具体动作。
6) 测试外部信号启动动作:手动触发外部信号源,观察是否正确执行配置的动作。
5.注意事项在使用外部信号启动动作时,需要注意以下事项:- 确保外部信号源与控制器的输入端口连接正确且稳定。
- 仔细配置信号触发条件,确保将在正确的信号触发条件下执行动作。
- 在测试过程中,确保周围环境安全,以防意外动作引发伤害。
附件:- 基于发那科的外部信号启动操作手册法律名词及注释:1.外部信号源:指与控制器相连的外部设备,用于触发动作的信号源,例如开关、传感器或PLC。
2.信号触发条件:指在接收到外部信号时,将执行动作的条件,如上升沿、下降沿或稳定状态。
3.动作:指根据接收到的外部信号执行的具体动作,如运动到指定位置、抓取物体或释放物体。
KUKA机器人外部启动配置信号

KUKA机器人配置外部启动忍不住吐槽一下,库卡的技术文档做的真的不咋地,看的人真心累,对于初学者尤其如此,而且网上的资料大多重复,很多问题找不到答案。
下面进入正题吧。
主要看一下外部启动相关的信号释义用PLC作为主站,KUKA机器人作为从站,PLC控制机器人启动的重要信号一览:信号具体含义如下:输入端(从机器人控制器的角度)➢PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号* 采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
一般情况下设该值为1,符合大多数读写习惯➢PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。
值域:1 …16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
程序号变量所占用得地址宽度,例如设为8,则PGNO变量占一个BYTE➢PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
这个没看太明白,但是不能胡乱设置,会影响程序号的传递。
目前设成0没发现问题➢PGNO_VALID - 程序号有效上级控制系统传送读取程序号指令的输入端。
这个信号别看太多了,只要知道是占用1bit的开关量信号就行了,在机器人启动并给定程序号后,发送该信号给机器人,相当于确认信号。
(忍不住也吐槽一下,就一个位信号,他这表格里说的正值,负值和0是指哪个,不明白唉)➢$EXT_START - 外部启动这个就简单直白了,启动信号,上升沿有效,可以给出去一段时间后撤销。
➢$MOVE_ENABLE - 允许运行由PLC给机器人的,配置Profinet后,该信号是机器人运动的必要前提条件,不管是EXT 模式还是T1模式,该信号必须给定并保持。
➢$CONF_MESS - 确认信息提示上升沿有效,相当于故障复位信号。
KUKA外部自动配置
操作步骤: 1、权限切换到“专家”用户组; 2、打开 程序CELL.SRC; 3. 在“CASE”段中将名称“EXAMPLE” 用相应的子程序名称进行替换 ,删除名称前 的分号; 4、关闭程序并保存更改; 5、若修改存在错误,则在保存后CELL程序 上会出现一个“×”标识,点击CELL,显 示出错误位置,对错误进行修改。
注:错误存在的原因为: 1、调用的子程序不存在; 2、修改时格式错误;
外 部 输 入 接 口
输入接口说明
• PGNO_TYPE 程序号类型;数值为1时,PLC以二进制的形式传递程序号;数值为2时,PLC以BCD码的形式 传递程序号;
• PGNO_LENGTH 程序号宽度;它的值决定通过PLC发送程序号的位数,PGNO_LENGTH=1...16; • PGNO_FBIT 程序号首位;即程序号的起始位, PGNO_FBIT=1...4096(PGNO_LENGTH) ; • REFLECT_PROG_NR 程序号镜像;1表示激活,0表示失效; • PGNO_PARITY 程序号奇偶校验;负值表示奇校验 ,0 则无法赋值, 正值表示偶校验 ; • PGNO_VALID 程序号有效;读取PLC传送的程序号命令; • EXT_START 程序启动;若I/O接口激活,此输入可以设置为开始或继续程序; • MOVE_ENABLE 运行开通;通过PLC反馈的输入来检查机器人驱动; • CONF_MESS 错误确认;设置该输入使PLC自动地删除(确认)错误信息; • DRIVES_ON 驱动接通;接通机器人的驱动; • DRIVES_OFF 驱动关闭;关闭机器人的驱动。
可以互相讨论下,但要小声点
机器人启动时序
川崎机器人配置外部自动

川崎机器人配置外部自动
一、板卡介绍
川崎机器人板卡有PNP及NPN两种规格,打开控制柜的上盖,IO板卡侧面有标签!
以下为川崎机器人NPN的板卡接线图,对PNP输入输出请查询!
二、接线注意事项
1、需要外供24V电源!
2、输入信号18针脚为外供24V,1-16为外供输入0V,19针脚为外供24V,20-35针脚为外供0V(18为1-16的公共端,19为20-35的公共端)
3、同样输出信号按照接线图接输出信号即可!
4、多次确认无误再开机,进行IO测试!
三、川崎机器人最高权限为R9894
最高权限可以打开部分隐藏的功能。
四、选择辅助—输入/输出—专用输入信号
1、对外部马达电源ON、外部故障复位、外部循环启动、外部停止(EXT_IT)分别定
义信号;
2、定义信号后,A+左右按键,使其专用打钩确认;
3、外部停止(EXT_IT)为常闭信号,相当于暂停旋钮,当无此信号机器人处于暂停状
态;
五、运行程序
1、程序选择主程序,光标选中主程序第一行;
2、示教器及控制柜的钥匙打成自动;
3、确定好外部自动的速度,选择步骤连续,周期连续!
4、先给外部马达电源ON(脉冲)
5、外部故障复位(脉冲)
6、外部循环启动(脉冲)
7、机器人即运动起来!。
KUKA简单操作技巧使用说明
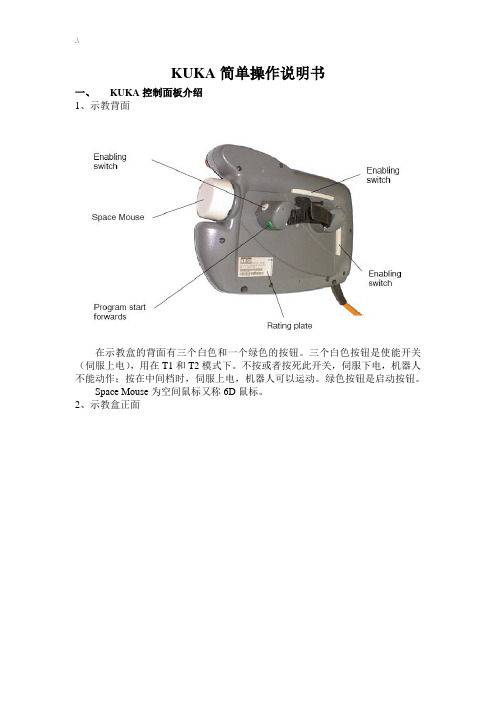
KUKA简单操作说明书一、KUKA控制面板介绍1、示教背面在示教盒的背面有三个白色和一个绿色的按钮。
三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。
绿色按钮是启动按钮。
Space Mouse为空间鼠标又称6D鼠标。
2、示教盒正面急停按钮:这个按钮用于紧急情况时停止机器人。
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。
需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。
伺服上电:这个按钮给机器人伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。
伺服下电:这个按钮给机器人伺服上电。
模式选择开关:T1模式:手动运行机器人或机器人程序。
在手动运行机器人或机器人程序时,最大速度都为250mm/s。
T2模式:手动运行机器人或机器人程序。
在手动运行机器人时,最大速度为250mm/s。
在手动运行机器人程序时,最大速度为程序中设定的速度。
本地自动:通过示教盒上的启动按钮可以使程序自动运行。
外部自动:必须通过外部给启动信号才能自动执行程序。
退出键:可以退出状态窗口、菜单等。
窗口转换键:可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。
当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。
暂停键:暂停正在运行的程序。
按“向前运行”或“向后运行”重新启动程序。
向前运行键:向前运行程序。
在T1和T2模式,抬起此键程序停止运行,机器人停止。
向后运行键:向后运行程序。
仅在T1和T2模式时有用。
回车键:确认输入或确认指令示教完成。
箭头键:移动光标。
菜单键:用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。
用退出键退出打开的菜单。
FANUC机器人与S7-1200 PLC PROFINET通讯及外部启动配置
FANUC机器人与S7-1200 PLC PROFINET通讯及外部启动配置前段时间项目接触到需用西门子1200PLC与发那科机器人进行Profinet通讯.由于发那科工业机器人这方面资料比较难找,下面我将该项目的配置步骤分享给大家,欢迎留言探讨。
FANUC机器人与S7-1200PLCPROFINET通讯步骤一、PLC组态(一)新建项目(二)点击设备与网络,添加新设备(三)选择CPU 类型(注意:PLC型号及版本号要更硬件一致)(四)双击PLC网络端口,建立以太网地址(五)添加新子网(一般情况位PN/IE1)(六)设定IP地址(注意:PLC的IP地址要跟机器人的IP地址应在同一网段类)(七)进入设备和网络,添加机器人(需要提前安装好机器人的GSD文件)(八)在右侧选择硬件目录→其它现场设备→PROFINET IO→I/O→FANUC→R-30ib EF2→A05B-2600-R834:FANUC Robot Controller(1.0)(九)双击硬件进行组态(十)进行组网。
双击机器人硬件端口,添加子网、添加机器人IP地址、PROFINET设备名称(机器人IP地址应与机器人本体设置的IP地址一致、设备名称与机器人本体设置的名称一致)(十一)根据项目需求添加通讯I/O字节数。
此项目添加16字节的输入输出模块(十二)返回设备和网络,进行控制器分配(十三)分配后,PLC与机器人之间会链接在一起(十四)设置机器人IO地址(此处地址是与机器人通讯的首地址)(此处的I 对应机器人的DO、此处的Q对应机器人的DI )(十五)组态完成后,进行编译(十六)编译完成后,下载进PLC中(十七)下载、点击装载(十八)下载完成。
二、机器人设置(一)设置机器人PROFINET地址:按下示教器上 MEUN 键→ 5I/O → 选中 I/O 页面→PROFINET(M) → ENTER →选中 2 频道(备注:2 频道是机器人做从站)→按下 DISP 键 →定址模式选择DCP→选中 IP 地址→按下 F4 键(编辑)→编辑完成后→按下 F1 键→(适用)→完成 IP 地址编辑。
工厂自动化机器人的配置与调试手册
工厂自动化机器人的配置与调试手册1. 概述本手册旨在提供关于工厂自动化机器人的详细配置与调试指导,以帮助用户正确、高效地使用和维护机器人。
本文档适用于具有基本机器人操作知识的用户。
2. 准备工作在开始配置与调试机器人之前,请确保以下准备工作已完成:1. 确保机器人安装在稳固的平台上,且电源线、信号线等连接正常。
2. 连接至控制系统(如PLC、工控机等)。
3. 安装并配置好机器人所需的软件。
4. 准备相应的工具和设备,如扳手、螺丝刀等。
3. 配置步骤3.1 基本参数设置1. 进入机器人控制系统,选择参数设置界面。
2. 根据实际应用需求,设置机器人基本参数,如关节角度、末端执行器坐标等。
3. 保存设置并退出。
3.2 运动学参数配置1. 进入运动学参数设置界面。
2. 根据机器人本体结构,配置各关节的运动范围、限制等。
3. 设置各关节的加速度、减速度等参数。
4. 保存设置并退出。
3.3 传感器配置1. 进入传感器配置界面。
2. 根据实际应用需求,配置传感器的类型、数量、接口等。
3. 设置传感器的检测范围、分辨率等参数。
4. 保存设置并退出。
3.4 程序与任务设置1. 进入程序设置界面。
2. 根据实际应用需求,编写或修改机器人控制程序。
3. 设置任务优先级、任务间的关系等。
4. 保存设置并退出。
4. 调试步骤4.1 硬件检查1. 检查机器人各部件是否安装正确,连接是否牢固。
2. 检查传感器、执行器等设备是否正常工作。
4.2 软件与硬件联调1. 启动控制系统,进入机器人程序界面。
2. 发送测试指令,检查机器人是否按照预期执行任务。
3. 若出现异常,检查程序、参数设置等是否正确,并逐步排查问题。
4.3 功能测试1. 进行单一功能测试,如关节运动、末端执行器操作等。
2. 逐步增加测试复杂度,进行全面功能测试。
3. 观察机器人执行任务过程中是否出现异常,如振动、卡顿等。
4.4 性能优化1. 根据测试结果,调整机器人运动参数,如速度、加速度等。
新时达机器人外部跟踪坐标系使用说明书-A
III
SPD-12-09-A
表 1.1 目标群体以及需要技能
目标群体 操作者 编程人员 维护人员 集成人员
需要技能 参加过机器人培训且获得合格证书,熟悉机器人操作。
有机器人编程基础,熟悉机器人功能。 熟悉机器人功能和机器人电气图。 熟悉机器人功能和机器人应用。
1.3 其他相关文档
1.4 注意事项
此手册主要向用户介绍机器人的外部跟踪坐标系,对于机器人各个模块细节 知识请参考相应文档。
第二章 安全 ..................................................................................................................................... 2
2.1 机器人安全防护装置 ................................................................................................................ 2 2.1.1 安全防护装置预览............................................................................................................. 2 2.1.2 紧急关断按键..................................................................................................................... 2 2.1.3 运行方式选择开关............................................................................................................. 2 2.1.4 点动运行 ............................................................................................................................ 3 2.1.5 机械终端限位..................................................................................................................... 3 2.1.6 软件限位开关..................................................................................................................... 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人外部自动启动配置方法
1、通过PLC信号来外部启动机器人
外部启动机器人:
步骤1、选定好要运行的程序,把机器人的运行模式切换到EXT_AUTO.
步骤2、PLC一上电就要给机器人发出$move_enable(要一直给)信号。
步骤3、PLC给机器人$move_enable信号。
步骤4、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤5、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤6、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
外部停止机器人和停止后启动机器人:
PLC把$drivers_ff断掉就可以停止机器人,这种停止是断掉机器人伺服。
停止后继续启动机器人,重复步骤4、5,6就可以启动机器人。
2、机器人故障复位方法:
当机器人有“确认信号”(故障)时,PLC发给机器人$conf_mess(脉冲信号)就可以复位。
3、机器人输出常用信号
1、$alarm_stop(机器人急停信号) 正常时该信号逻辑为1,当机器人急停被按下时逻
辑为0.
2、$rc_rdy1(控制柜就绪) 正常时该信号逻辑为1,当机器人有“确认信息”时逻辑为
0,“确认信息”被确认后,逻辑为1.
3、$pro_act 机器人在运行程序时输出为1.
4、$in_home机器人在home点时输出为1.。