第9章伺服系统设计
自动控制原理-第9章 控制系统的非线性问题

9 控制系统的非线性问题9.1概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
图9-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
图9-1 伺服电动机特性9.1.1控制系统中的典型非线性特性的类型常见典型非线性特性有饱和非线性、间隙非线性、死区非线性、继电非线性等。
9.1.1.1饱和非线性控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。
如图9-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。
许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。
有时,工程上还人为引入饱和非线性特性以限制过载。
图9-2 饱和非线性9.1.1.2不灵敏区(死区)非线性控制系统中的测量元件、执行元件等一般都具有死区特性。
例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。
如图9-3所示,其特性是输入信号在∆<<∆-x 区间时,输出信号为零。
超出此区间时,呈线性特性。
这种只有在输入量超过一定值后才有输出的特性称为不灵敏区非线性,其中区域∆<<∆-x 叫做不灵敏区或死区。
第九章 智能控制的应用实例

20
9.1智能控制在电气传应模糊控制
College of Electrical and Information Engineering, Hunan Univ.
21
9.1智能控制在电气传动中的应用
9.1.4基于递归模糊神经网络的感应电机无速度传感器矢量控制
College of Electrical and Information Engineering, Hunan Univ.
19
9.1智能控制在电气传动中的应用
9.1.3无速度传感器感应电机矢量控制系统的自适应模糊控制
College of Electrical and Information Engineering, Hunan Univ.
College of Electrical and Information Engineering, Hunan Univ. 23
9.1智能控制在电气传动中的应用
9.1.4基于递归模糊神经网络的感应电机无速度传感器矢量控制
图9.35 简化的基于RFNN的异步电机矢量控制系统结构
College of Electrical and Information Engineering, Hunan Univ. 24
9.1.2基于小波神经网络定子电阻估计器的模糊直接转矩控制
控制系统 总体结构
College of Electrical and Information Engineering, Hunan Univ.
10
9.1智能控制在电气传动中的应用
9.1.2基于小波神经网络定子电阻估计器的模糊直接转矩控制
图9.21 小波神经网络定子电 阻估计器的MSE曲线
College of Electrical and Information Engineering, Hunan Univ. 29
电力拖动自动控制系统:运动控制系统:第九章
图9-12 双环位置伺服系统结构图
§9.3伺服系统的设计
三.双环位置伺服系统
系统的开环传递函数为
W op (s)
系统的开环放大系数
K p ( i s 1) CT /( jJ ) K ( i s 1) 3 2 is s (Ti s 1) s (Ti s 1)
K
三.双环位置伺服系统
由Routh稳定判据求得系统稳定的条件
i d Ti ( i d ) K ( i d )( i d Ti ( i d )) 1
图9-13 采用PID控制的双环控制伺服系统开环传递函数对数幅频特性
§9.3伺服系统的设计
常用的调节器有比例-微分(PD)调节器、比例-积分(PI)调 节器以及比例-积分-微分(PID)调节器,设计中可根据实际 伺服系统的特征进行选择。
§9.3伺服系统的设计
一.调节器及其传递函数
在系统的前向通道上串联PD调节器校正装置,可以使相位超前, 以抵消惯性环节和积分环节使相位滞后而产生的不良后果。
机械传动机构的状态方程
d m dt j
§9.2伺服系统控制对象的数学模型
一.直流伺服系统控制对象的数学模型
驱动装置的近似等效传递函数
状态方程
Ks Ts s 1
dUd 0 Ks 1 Ud0 uc dt Ts Ts
§9.2伺服系统控制对象的数学模型
一.直流伺服系统控制对象的数学模型
图9-11 双环位置伺服系统
§9.3伺服系统的设计
三.双环位置伺服系统
忽略负载转矩时,带有电流闭环控制对象的传递函数为
Wobj ( s )
伺服系统培训课程设计
伺服系统培训课程设计一、课程目标知识目标:1. 学生能理解伺服系统的基本概念,掌握其工作原理和组成结构。
2. 学生能掌握伺服系统中关键参数的计算方法,如转速、扭矩、精度等。
3. 学生了解不同类型伺服系统的特点及其适用场合。
技能目标:1. 学生能运用所学知识分析和解决实际伺服系统应用中的问题。
2. 学生具备设计简单伺服系统的能力,能根据需求选择合适的组件并进行调试。
3. 学生能熟练使用相关工具和设备进行伺服系统的安装、调试和维护。
情感态度价值观目标:1. 培养学生关注工程技术发展的意识,激发对伺服系统及其应用的兴趣。
2. 培养学生严谨、细致、负责的工作态度,增强团队协作和沟通能力。
3. 培养学生具备安全意识,遵循相关操作规程,确保伺服系统应用的安全可靠。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,以实际应用为导向。
课程目标旨在使学生掌握伺服系统的基础知识,具备实际操作和问题解决能力,同时培养良好的职业素养和安全意识。
通过课程学习,为学生未来在自动化、机器人等相关领域的发展奠定基础。
二、教学内容1. 伺服系统概述:介绍伺服系统的基本概念、发展历程、应用领域及发展趋势。
- 教材章节:第一章 伺服系统概述- 内容列举:伺服系统的定义、分类、工作原理。
2. 伺服系统组成与原理:分析伺服系统的组成结构,讲解各部分功能及相互关系。
- 教材章节:第二章 伺服系统的组成与原理- 内容列举:驱动器、执行器、反馈元件、控制器等组成部分及其工作原理。
3. 伺服系统关键参数计算:学习伺服系统中转速、扭矩、精度等关键参数的计算方法。
- 教材章节:第三章 伺服系统关键参数计算- 内容列举:转速与扭矩的计算、精度分析、系统稳定性分析。
4. 伺服系统类型及特点:介绍不同类型伺服系统的特点、优缺点及适用场合。
- 教材章节:第四章 伺服系统类型及特点- 内容列举:步进伺服系统、交流伺服系统、直流伺服系统等。
5. 伺服系统应用与案例分析:分析伺服系统在实际应用中的案例,提高学生的问题解决能力。
机电一体化系统设计伺服系统设计
二、伺服电机及其控制
2 直流电机的功率驱动 直流电机的调速电路目前以脉冲宽度调制电路应
用最为广泛.
桥式(H形)PWM变换器主电路
二、伺服电机及其控制
作用在电机两端的 平均电压为:
UAB(2Tton1)Us
二、伺服电机及其控制 3 直流伺服系统模型
二、伺服电机及其控制
1校正环节:一般速度环调节器为比例环节 G1S =Kp
1 系统等效转动惯量 的计算
系统运动部件动能的总和J d为x
E1 2im 1Mi Vi21 2jn1Jj
2 j
二、伺服系统稳态设计
设等效到执行元件输出轴上的总动能为
Edx
1 2
Jdx
d2
根据动能不变的原则,有 Edx ,E系统等效转动惯量
为
Jdxim 1Mi Vid2jn1Jj dj 2
一、方案设计
4.控制系统方案的选择 控制系统方案的选择包括微型机、步进电动机
控制方式、驱动电路等的选择.常用的微型机有单 片机、单板机、工业控制微型机等,其中单片机由 于在体积、成本、可靠性和控制指令功能等许多 方面的优越性,在伺服系统的控制中得到了广泛的 应用.
二、伺服系统稳态设计
系统方案确定后,应进行方案实施的具体化设 计,即各环节设计,通常称为稳态设计.其内容主要 包括执行元件规格的确定、系统结构的设计、系 统惯量参数的计算以及信号检测、转换、放大等 环节的设计与计算.稳态设计要满足系统输出能力 指标的要求.
可按下面公式计算
360
0பைடு நூலகம்
Zm
式中 为步距角; Z为转子上的齿数;m为
步进电动机运行的拍数.
同一台步进电动机,因通电方式不同,运行时步 距角也是不同的
9.1.2 西门子840D数控伺服系统硬件配置_PLC与步进伺服快速入门与实践_[共14页]
![9.1.2 西门子840D数控伺服系统硬件配置_PLC与步进伺服快速入门与实践_[共14页]](https://img.taocdn.com/s3/m/ebf989d1eff9aef8951e06a0.png)
步进伺服系统综合应用实例263地保证轧辊车削质量。
图9-3 数控轧辊车床基本电气设置图9.1.2 西门子840D 数控伺服系统硬件配置如图9-4所示,西门子840D 伺服系统共分为四个模块:电源和馈电模块、NCU 模块、主轴驱动模块(MSD )以及进给驱动模块(FDD )。
电源和馈电模块主要为840D 系统提供各种类型的电源,并将反馈的电量送给电网,该模块能使车床控制系统使用效率大大提高;NCU 模块是840D 数控系统中央处理单元,主要包括:NC-CPU 、带PLC 功能和通信功能模块、风扇模块(只在NCK 型号为573.2和573.3中附加)、各种接口(与上位机及伺服元件通信)、NCU 盒;主轴驱动模块主要负责对轧辊车床主轴的控制;进给驱动模块主要负责对轧辊车床刀架横向及纵向的控制。
这四部分模块通过设备总线及圆电缆连接。
接下来逐一介绍各主要组成部分的功能部件。
1.数字控制单元(NCU )(1)NCU 规格及引脚定义NCU 是SINUMERIK 840D 数控系统的控制中心和信息处理中心,数控系统的直线插补、圆弧插补等轨迹运算和控制、PLC 系统的算术运算和逻辑运算都是由NCU 完成的。
在SINUMERIK 840D 中,NC-CPU 和PLC-CPU 采用硬件一体化结构,集成在NCU 中。
264图9-4 西门子840D 伺服系统主要组成模块表9-2给出了NCU 的四种型号,已经由最初的NCU572.2发展到了NCU573.4,存储器容量从最大2.5MB 发展到64MB ,处理器频率由233MHz 发展到500MHz 。
由此可见,西门子840D NCU 单元能够满足数控轧辊车床PLC 程序容量大的中高性能控制需求。
表9-2西门子840D 伺服系统NCU 模块规格 模 块说 明 NCU 572.3AMD K6-2,233MHz NCU 572.4NC 存储器:最大2.5MB ,新的PLC314-2C-DP NCU 573.3Pentium Ⅲ,500MHz NCU 573.4 NC 存储器:最大64MB ,新的PLC314-2C-DP如图9-5(a )所示,NCU-1接口主要分为以下七部分。
《数控原理与系统》第9章__典型数控系统

第8章 典型数控系统及应用
பைடு நூலகம்
主印刷電路板(MASTER PCB)
第 7 、 8軸控 制板
第8章 典型数控系统及应用
該系統除了通用的宏程式功能以外, 還增加了定制型用戶宏程式,這樣為用戶 提供了更大的個性化設計的空間。用戶可 以通過編程對顯示幕幕、處理過程控制等 進行編輯,以實現個性化機床的設計。
第8章 典型数控系统及应用
(4)高速高精度的控制 FANUC 0–C數控系統採用了多CPU方式進行 分散處理,實現了高速連續的切削。為了實現在 切削路徑中的高速、高精度,在系統功能中增加 了自動拐角倍率,伺服前饋控制等,大大地減少 了伺服系統的誤差。 對PLC的介面增加了高速M、S、T介面功能, 進一步縮短了執行時間,提高了系統的運行速度。 為了提高系統處理外部數據的速度, FANUC 0–C系統在硬體上增加了遠程緩衝控制, 系統可以實現高速的DNC操作。
第8章 典型数控系统及应用
9.1.2 FANUC 0系列數控系統 1.主要功能特點 FANUC 0系列數控系統分為A型、B型、 C型和D型產品,目前在國內使用較多的是 普及型FANUC 0–D和全功能型FANUC 0–C兩 個子系列,其功能特點如下。
第8章 典型数控系统及应用
第8章 典型数控系统及应用
2.基本構成 FANUC 0系統由數控單元本體,主軸和進給 伺服單元以及相應的主軸電機和進給電機,CRT 顯示器、系統操作面板、機床操作面板,附加的 輸入/輸出介面板(B2),電池盒,手搖脈衝發 生器等部件組成,下麵對它的主要部件的基本配 置做簡要的說明。
第8章 典型数控系统及应用
液压传动与控制课后题及详解答案
《液压传动与控制》习题集液压传动课程组兰州工专内部使用前言《液压传动与控制》教材由兰州工业高等专科学校、云南工学院、新疆工学院、陕西工学院四所院校编写,于1994年6月由重庆大学出版社出版。
阅历十余年,液压传动的内容发展很快,所以修订后再出版。
为有利于教学,编了该教材的思考题与习题集,仅供参考。
编者2005年月目录绪论 (4)第一章工作介质及液压流体力学基础 (4)第二章液压泵及液压马达 (7)第三章液压缸 (9)第四章控制阀 (10)第五章液压辅件 (13)第六章液压基本回路 (14)第七章典型液压系统分析 (19)第八章液压系统的设计与计算 (20)第九章液压伺服控制系统 (20)第十章液压系统(设备)的安装、调试、使用及维护 (21)第十一章液压系统的故障诊断及排除 (21)绪论0-1 何谓液压传动?其基本工作原理是怎样的?0-2 结合图0-2所示的液压系统图,说明液压系统由哪几部分组成?各起什么作用? 0-3 液压元件在系统图中是怎样表示的?0-4 液压传动与机械传动、电气传动和气压传动相比较,有哪些优缺点?第一章 工作介质及液压流体力学基础1-1什么是液体的粘性?常用的粘度表示方法有哪几种,并分别叙述其粘度单位。
1-2压力的定义是什么?静压力有哪些特性?压力是如何传递的?1-3什么是绝对压力、相对压力、表压力、真空度?它们之间的关系是什么?1-4为什么说液压系统的工作压力决定于外负载?液压缸有效面积一定时,其活塞运动速度由什么来决定?1-5伯努利方程的物理意义是什么?该方程的理论式与实际式有何区别?1-6什么是层流?什么是紊流?液压系统中液体的流动希望保持层流状态,为什么? 1-7管路中的压力损失有哪几种?分别受哪些因素影响?1-8有200cm 3的液压油,在50℃时流过恩氏粘度计的时间t 1=153s ;同体积的蒸馏水在20℃时流过的时间t 2=51s 。
该油的恩氏粘度oE 50、运动粘度v 、动力粘度μ各为多少 ? 油液的新、旧牌号各为什么?解:3511532150==t t E =()cst E E v 12.213/64.830.8/64.80.85050=-⨯=-=()cp v 19109001012.2136=⨯⨯⨯=⋅=-ρμ旧牌号 20 ;新牌号 N321-9某液压油的运动粘度为20cSt ,其密度ρ = 900kg /m 3,求其动力粘度和恩氏粘度各为多少?解:()cp v 1810900102036=⨯⨯⨯=⋅=-ρμ由 t t E E v/64.80.8-= 导出 064.80.8=--t t E v E()1626204264.88420202±=⨯-⨯⨯-±=t E 875.21=t E 375.02-=t E(舍去)1-10如图所示直径为d ,重量为G 的柱塞浸没在液体中,并在F 力作用下处于静止状态。
伺服进给系统的课程设计
伺服进给系统的课程设计一、课程目标知识目标:1. 让学生理解伺服进给系统的基本原理,掌握其关键组成、功能及相互关系;2. 使学生掌握伺服进给系统的数学模型及其在不同工况下的性能特点;3. 帮助学生了解伺服进给系统在实际工程中的应用及发展趋势。
技能目标:1. 培养学生运用所学知识对伺服进给系统进行正确选型、调试及故障排除的能力;2. 提高学生运用数学工具对伺服进给系统进行性能分析及优化的技能;3. 培养学生运用现代设计方法进行伺服进给系统设计的实践能力。
情感态度价值观目标:1. 培养学生对机械工程领域的兴趣和热情,激发学生主动探索新知识的精神;2. 培养学生严谨的科学态度,使其具备良好的团队协作和沟通能力;3. 增强学生的环保意识,使其在设计过程中充分考虑能源、材料等资源的合理利用。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,旨在提高学生对伺服进给系统的综合运用能力。
课程目标具体、可衡量,以便学生和教师在教学过程中能够明确预期成果,为后续教学设计和评估提供依据。
二、教学内容1. 伺服进给系统原理:讲解伺服进给系统的基本概念、分类及工作原理,重点分析伺服电机、驱动器、反馈元件等关键组成部分的功能和特性。
教材章节:第二章“伺服进给系统概述”2. 数学模型及性能分析:介绍伺服进给系统的数学模型,包括传递函数、状态空间方程等,分析系统在不同工况下的性能特点。
教材章节:第三章“伺服进给系统的数学模型与性能分析”3. 系统设计与应用:讲解伺服进给系统的设计方法,包括选型、调试及故障排除,并结合实际工程案例进行分析。
教材章节:第四章“伺服进给系统的设计与应用”4. 性能优化与前沿技术:探讨伺服进给系统性能优化方法,介绍相关前沿技术,如智能控制、模糊控制等在伺服进给系统中的应用。
教材章节:第五章“伺服进给系统的性能优化与前沿技术”教学内容按照教学大纲进行安排和进度规划,确保科学性和系统性。
通过以上四个方面的教学,使学生全面掌握伺服进给系统的相关知识,为后续实践环节打下坚实基础。
机电传动控制教案

机电传动控制教案第一章:机电传动控制概述1.1 机电传动控制的概念解释机电传动控制的定义强调机电传动控制在现代工业中的重要性1.2 机电传动系统的组成介绍机电传动系统的常见组成部分,如电动机、传动装置、负载等解释各个部分在系统中的作用和相互关系1.3 机电传动控制系统的分类介绍机电传动控制系统的不同类型,如开环控制、闭环控制等比较各种控制系统的特点和应用场景第二章:电动机及其控制2.1 电动机的分类和特性介绍不同类型的电动机,如交流异步电动机、直流电动机等分析各种电动机的启动、制动和调速特性2.2 电动机的控制方法介绍电动机的常见控制方法,如开关控制、变频调速等分析各种控制方法的工作原理和应用场景2.3 电动机的选择和安装讲解电动机的选择依据,如负载类型、功率需求等介绍电动机的安装要求和注意事项第三章:传动装置及其控制3.1 传动装置的分类和特性介绍常见的传动装置,如齿轮传动、带传动等分析各种传动装置的传动比、传动效率等特性3.2 传动装置的控制方法介绍传动装置的常见控制方法,如机械调速、电子调速等分析各种控制方法的工作原理和应用场景3.3 传动装置的选择和安装讲解传动装置的选择依据,如负载类型、传动比需求等介绍传动装置的安装要求和注意事项第四章:机电传动控制系统的应用4.1 机电传动控制系统在工业自动化中的应用介绍机电传动控制系统在工业自动化中的典型应用案例,如、生产线等分析机电传动控制系统在提高生产效率和产品质量方面的作用4.2 机电传动控制系统在交通运输领域的应用介绍机电传动控制系统在交通运输领域的典型应用案例,如电动汽车、轨道交通等分析机电传动控制系统在提高运输效率和减少能源消耗方面的作用4.3 机电传动控制系统在其他领域的应用介绍机电传动控制系统在其他领域的典型应用案例,如医疗设备、建筑自动化等分析机电传动控制系统在提高生活质量和工作效率方面的作用第五章:机电传动控制系统的维护与故障诊断5.1 机电传动控制系统的维护介绍机电传动控制系统的日常维护内容和注意事项强调定期维护对于系统稳定运行的重要性5.2 机电传动控制系统的故障诊断方法介绍常见的故障诊断方法,如观察法、参数测量法等分析各种故障诊断方法的优缺点和适用场景5.3 机电传动控制系统的故障处理和预防措施讲解故障处理的一般流程和方法介绍预防措施,如使用高质量的元件、避免过载等第六章:传感器与信号处理6.1 传感器的类型与作用介绍各种常用传感器,如温度传感器、压力传感器等分析传感器在机电传动控制系统中的作用和重要性6.2 传感器的选用与安装讲解传感器的选用依据,如测量范围、精度要求等介绍传感器的安装方法和注意事项6.3 信号处理与分析解释信号处理的基本概念和方法分析信号处理在机电传动控制系统中的应用,如滤波、放大等第七章:PLC控制系统7.1 PLC的基本原理与组成介绍PLC的概念、工作原理和组成结构强调PLC在机电传动控制系统中的应用优势7.2 PLC编程与控制讲解PLC编程的基本语言和方法,如梯形图、指令表等分析PLC控制在机电传动系统中的应用案例7.3 PLC系统的维护与故障诊断介绍PLC系统的日常维护内容和注意事项讲解故障诊断的方法和技巧第八章:变频器与电机调速8.1 变频器的基本原理与类型介绍变频器的工作原理和类型,如电压型、电流型等强调变频器在电机调速中的应用优势8.2 变频器控制与应用讲解变频器的控制原理和方法,如矢量控制、直接转矩控制等分析变频器在电机调速中的应用案例8.3 变频器的选用与安装介绍变频器的选用依据,如电机功率、调速范围等讲解变频器的安装方法和注意事项第九章:伺服控制系统9.1 伺服控制系统的基本原理与组成介绍伺服控制系统的工作原理和组成,如伺服电动机、伺服驱动器等强调伺服控制系统在精确控制中的应用优势9.2 伺服控制系统的选用与调试讲解伺服控制系统的选用依据,如控制精度、响应速度等介绍伺服控制系统的调试方法和注意事项9.3 伺服控制系统的应用案例分析伺服控制系统在典型应用场景中的应用案例,如数控机床、等第十章:机电传动控制系统的节能与环保10.1 节能技术的应用介绍节能技术在机电传动控制系统中的应用,如电机变频调速、高效传动装置等分析节能技术在降低能耗和提高经济效益方面的作用10.2 环保技术的应用介绍环保技术在机电传动控制系统中的应用,如废弃物回收、低噪音传动装置等强调环保技术在实现可持续发展和社会责任方面的意义10.3 节能与环保的法规和标准讲解与节能和环保相关的法规和标准,如节能产品认证、环保法规等强调企业和个人在遵循法规和标准方面的责任第十一章:机电传动控制系统的安全与保护11.1 安全防护措施的重要性强调在机电传动控制系统中实施安全防护措施的必要性讨论因缺乏安全防护导致的潜在风险和事故11.2 安全防护技术与设备介绍常见的安全防护技术,如紧急停止按钮、安全门等分析安全防护设备在保障人员和设备安全方面的作用11.3 安全标准与合规性讲解与机电传动控制系统安全相关的国家和行业标准强调遵守安全标准和合规性的重要性第十二章:案例分析与实践12.1 机电传动控制案例分析分析具体的机电传动控制案例,如自动化装配线、升降机等讨论案例中的关键技术、挑战和解决方案12.2 实践操作与技能培训强调实际操作在理解机电传动控制系统中的重要性介绍常见的实践操作活动和技能培训方法12.3 项目设计与实施讲解机电传动控制系统项目设计的基本步骤和方法讨论项目实施过程中的管理、协调和风险控制第十三章:发展趋势与创新13.1 机电传动控制技术的发展趋势探讨机电传动控制技术的发展方向,如智能化、网络化等分析新兴技术如物联网、大数据在机电传动控制系统中的应用潜力13.2 创新设计与研发强调创新在推动机电传动控制系统发展中的重要性介绍创新设计的方法和研发流程13.3 知识产权保护与技术转移讲解知识产权在技术创新中的作用和保护方法讨论技术转移和产业化的途径和挑战第十四章:经济效益与投资分析14.1 经济效益评估介绍经济效益评估的方法和指标分析机电传动控制系统投资的经济效益14.2 投资决策与风险分析讲解投资决策的基本原则和方法分析机电传动控制系统投资的风险因素和应对策略14.3 财务分析与投资回报介绍财务分析的方法,如现金流量分析、净现值分析等讨论投资回报的计算和评估方法第十五章:综合测试与评价15.1 测试方法与设备介绍机电传动控制系统综合测试的方法和设备强调测试在确保系统性能和可靠性中的重要性15.2 性能评价与优化讲解机电传动控制系统的性能评价指标和方法讨论系统性能优化的策略和技术15.3 持续改进与寿命周期管理强调持续改进在提高机电传动控制系统性能和寿命中的作用介绍寿命周期管理的方法和实践重点和难点解析本文主要介绍了机电传动控制的相关概念、系统组成、控制方法、应用领域、维护与故障诊断等方面的内容。
《伺服控制技术》课程教学大纲
《伺服控制技术》课程教学大纲课程编码:S3072114英文名称:Servo Control Technology一、课程说明1. 课程类别专业课模块2. 适用专业及课程性质选修:电气工程及其自动化专业3. 课程目的(1)使学生了解伺服系统在数控系统中的地位和作用。
(2)为学生今后从事伺服系统的开发、调试、维护工作打下一定的基础。
4. 学分与学时学分为1.5,学时为305. 建议先修课程电路分析,模拟电子电路,数字电子技术,工程电磁场,电机学,自动控制原理。
6. 推荐教材或参考书目推荐教材:(1)《运动控制系统》. 李宁编著. 机械工业出版社.2004年参考书目:(1)《伺服系统》. 钱平主编.机械工业出版社.2005年7. 教学方法与手段以传统讲授手段为主,采用板书与多媒体课件结合的方式进行课堂教学。
8. 考核及成绩评定考核方式:考查成绩评定:(1)平时成绩占30 % ,形式有:出勤,课堂表现,平时测验(2)考试成绩占70 %,形式有:开卷考试,节课论文9. 课外自学要求(1)要求学生通过网络及图书馆查询相关信息。
(2)课外习题不应少于20题。
二、课程教学基本内容及要求(选学内容用※标注)第一章概述基本内容:(1)伺服系统的作用及组成(2)伺服系统的基本要求和特点基本要求:(1)了解伺服系统组成。
(2)了解伺服系统的基本要求。
教学重点及难点:(1)伺服系统的组成。
第二章电力电子器件基本内容:(1)电力电子器件的特征(2)电力电子器件的分类(3)电力电子器件的选择基本要求:(1)了解电力电子器件的特征、分类和选择。
教学重点及难点:(1)电力电子器件的选择。
第三章步进电动机控制基本内容:(1)步进电动机的工作原理(2)步进电动机的开闭环控制(3)步进电动机的点-位控制(4)步进电动机控制的程序设计基本要求:(1)理解步进电动机的工作原理。
(2)掌握步进电动机的开闭环控制。
(3)掌握步进电动机的点-位控制。
液压传动第九章
8
9.2
9.2.1
液压伺服系统
液压伺服阀
(1) 液压伺服阀的分类 电液伺服阀将微弱的电气控制信号转化为几千瓦至几十千瓦的、可控 的液压动力。 电液伺服阀是液压控制系统的核心元件。
电液伺服阀的种类较多,分为:
单级、两级及三级 流量控制型、压力控制型、压力流量控制型
动圈式、动铁式
滑阀式、喷嘴-挡板式、射流管式 恒压源式、恒流源式等等。
中国地质大学远程教学
9
(2) 液压伺服阀的工作原理
a、滑阀式电液伺服阀
中国地质大学远程教学
10
(2) 液压伺服阀的工作原理(续)
b、喷嘴-挡板式二级四通电液伺服阀
S S
N
N
1—信号线; 2—永磁体; 3—线圈; 4—衔铁; 5—弹簧管; 6—喷嘴; 7—挡板; 8—反馈弹簧杆; 9—阀芯; 10—固定阻尼孔; 11—过滤器; 12—阀体
中国地质大学远程教学
11
9.2.1
典型液压伺服系统分析
(1)、机械手伸缩运动伺服系统
中国地质大学远程教学
12
9.2.1
典型液压伺服系统分析(续1)
(1)、机械手伸缩运动伺服系统
中国地质大学远程教学
13
ห้องสมุดไป่ตู้
9.2.1
典型液压伺服系统分析(续2)
(2)、钢带张力控制系统
中国地质大学远程教学
14
9.2.1
中国地质大学远程教学
7
9.1.5
液压伺服系统的优缺点
1、液压伺服控制的优点 (1)液压元件的功率—重量比和力矩-惯量比大 可以组成结构紧凑、体 积小、重量轻、加速性好的伺服系统。 (2)液压动力元件快速性好,系统响应快。 (3)液压伺服系统抗负载的刚度大,即输出位移受负载变化的影响小, 定位准确,控制精度高。 2、液压伺服控制的缺点 (1) 液压元件,特别是精密的液压控制元件(如电液伺服阀)抗污染能力 差,对工作油液的清洁度要求高。 (2) 油温变化时对系统的性能有很大的影响。 (3) 当液压元件的密封设计、制造相使用维护不当时.容易引起外漏, 造成环境污染。 (4) 液压元件制造精度要求高,成本高。 (5) 液压能源的获得和远距离传输都不如电气系统方便。
三洋PY系列伺服控制器中文手册第九章2
12.70
P50B03003D
170.00
PY2A015
P50D04006D
43.90
P50B04010D
27.00
P50B05005D
59.20
P50B05010D
23.00
P50B05020D
7.98
P50B07020D
13.00
P50B07030D
7.27
P10B10030H
4.29
P10B10075H
α 159.18 117.73 49.27 210.53 63.32 40.15 86.16 39.20 39.68 22.20 30.48 24.25
β 0.39×10-7 0.26×10-7 7.63×10-7 7.50×10-7 5.55×10-7 3.42×10-7 0.16×10-7 5.45×10-7 5.45×10-7 1.67×10-7 2.57×10-7 10.9×10-7
9. 技术说明
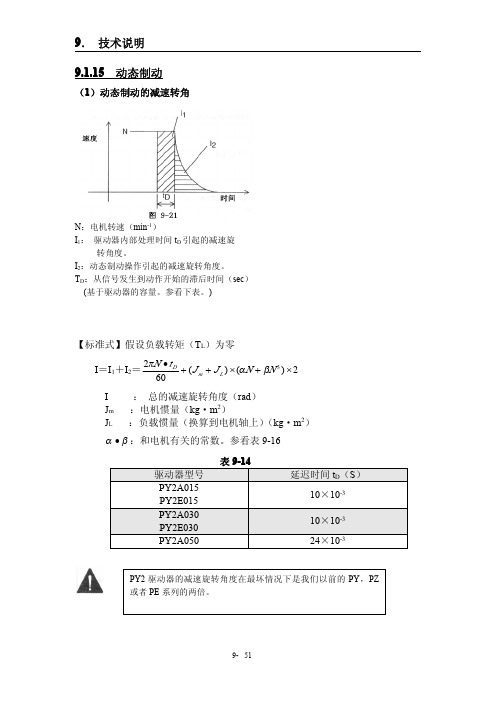
9.1.15 动态制动
(1)动态制动的减速转角
N:电机转速(min-1) I1: 驱动器内部处理时间 tD 引起的减速旋
转角度。 I2:动态制动操作引起的减速旋转角度。 TD:从信号发生到动作开始的滞后时间(sec)
(基于驱动器的容量。参看下表。)
【标准式】假设负载转矩(TL)为零
I=I1+I2= 2πN • tD 60
1.28
P50B08075D
4.61
P50B08100D
2.99
P60B13100H
1.57
P60B13150H
1.08
P80B18120H
1.63
β
60.5×10-7 37.3×10-7 12.2×10-7 17.2×10-7 9.20×10-7 8.00×10-7 5.01×10-7 22.8×10-7 9.29×10-7 3.86×10-7 6.14×10-7 4.41×10-7 3.08×10-7 0.75×10-7 1.65×10-7 2.41×10-7 1.06×10-7 3.59×10-7 6.80×10-7 3.68×10-7 2.08×10-7 2.95×10-7 1.44×10-7 0.88×10-7 0.62×10-7 4.74×10-7 3.39×10-7 0.46×10-7 0.27×10-7 0.61×10-7 0.48×10-7 1.81×10-7 1.05×10-7 1.59×10-7 0.93×10-7 0.49×10-7 0.30×10-7 1.19×10-7 0.60×10-7 2.06×10-7
前言(运动控制系统 陈伯时)
主要章节
第1章 绪论 第一篇 直流调速系统
第2章 转速反馈控制的直流调速系统 第3章 转速、电流反馈控制的直流调速系统 第4章 可逆控制和弱磁控制的直流调速系统 第二篇 交流调速系统 第5章 基于稳态模型的异步电动机调速系统 第6章 基于动态模型的异步电动机调速系统 第7章 绕线转子异步电动机双馈调速系统 第8章 同步电动机变压变频调速系统 第三篇 伺服系统 第9章 伺服系统
特点:前序课程多,涵盖内容广,实用性强。 要求:掌握闭环调速系统结构、原理及设计。
2.课程主要内容及章节安排
可控电源-电动机系统的特殊问题及机械特性; 调速系统的性能指标; 交、直流调速系统和伺服系统的原理和结构; 反馈控制的基本特点,反馈控制系统的静态和动
态性能指标及分析方法; 调节器结构及参数的设计方法; 反馈控制系统的实现; 计算机仿真在控制系统中的应用;
3.课时安排
课程总学时48学时,课堂学时40学时, 实验课时8学时;
课程着重讲解第1篇直流调速系统, 以第2、3、4章为重点,第2篇内容在 后续课程《交流调速》中讲解。第3 篇内容介绍几个系统
阮毅 陈伯时 主编
机械工业出版社
前言
课程性质、特点及要求; 课程内容及章节安排; 课时安排;
1.课程性质、特点及要求
性质:高等院校电气工程及其自动化、自动 化专业本科必修课程。可作为电力电子与电 力传动、工业自动化等相关学科硕士研究生 用书,还可供从事电力拖动控制系统的工程 技术人员参考。
第一篇直流调速系统第2章转速反馈控制的直流调速系统第3章转速电流反馈控制的直流调速系统第4章可逆控制和弱磁控制的直流调速系统第二篇交流调速系统第5章基于稳态模型的异步电动机调速系统第6章基于动态模型的异步电动机调速系统第7章绕线转子异步电动机双馈调速系统第8章同步电动机变压变频调速系统第三篇伺服系统第9章伺服系统课程总学时48学时课堂学时40学时实验课时8学时
电工技术(第二版)常晓玲章 (9)
第9章 控制电机
(6) 单相串励电动机。 单相串励电动机是交直流两用的, 多数情况下使用交流电 源。 由于它具有较大的启动转矩和软的机械特性, 广泛应用 在电动工具中, 如手电钻就采用这种电动机。 (7) 电磁调速电动机。 电磁调速电动机是采用电磁转差离合器调速的异步电动机。 这种电动机可以在较大的范围内进行无级平滑调速, 是交流无 级调速设备中最实用简单的一种。
第9章 控制电机
第9章 控 制 电 机
9.1 控制电机概述 9.2 步进电动机 9.3 伺服电动机 9.4 微型同步电动机 9.5 测速发电机与光电编码器 本章小结
第9章 控制电机 9.1
9.1.1 图9-1为两种伺服系统的示意方框图。 其中图9-1(a)
为经济型数控机床常用的步进电动机开环伺服系统, 计算机 数控装置给出位移指令脉冲,驱动电路将脉冲放大, 去驱动 步进电动机按命令脉冲转动, 并带动工作台按要求进行位移。
第9章 控制电机 图9-2 三相单三拍运行时反应式步进电A相绕组通电, 且B相、 C相绕组都不通电时, 由于磁 通具有力图走磁阻最小路径的特点。 所以转子齿1和齿3的轴线 与定子A极轴线对齐(负载转矩为零时), 如图9-2(a) 所示。 当A相断电, B相通电时, 转子便逆时针方向转过 30°, 使转子齿2和齿4的轴线与定子B极轴线对齐, 如图 9-2(b)所示。 当B相断电, C相通电时, 转子再转过30°, 使转子齿1和齿3的轴线与定子C极轴线对齐, 如图9-2(c)所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A=[0 1
0;0
0 1;-160
-56
-14];
B=[0;0;160]; C=[1 0 D=[0]; 0];
% ***** Enter step command and plot command *****
t=0:0.01:5; y=step(A,B,C,D,1,t); plot(t,y) grid title(‘Unit-Step Response’) xlabel(‘t Sec’)
显然, x1 () y () r 。在阶跃响应中没有稳态误差。 注意,由于
u () Kx() k1 r () Kx() k1 r
所以
x1 () u () [160 54 11] x 2 () 160r x 3 ( ) r [160 54 11] 0 160r 0 160r 160r 0 即在稳态时,控制输入 u 为零。
5.7 伺服系统设计
在经典控制理论中,我们通常按前馈传递函数中的积分 器数目来划分系统的类型,如 0 型系统、I 型系统等。I 型 系统在前馈通道中有一个积分器,且此系统的阶跃响应不存 在稳态误差。本节将讨论 I 型伺服系统的极点配置方法,此 时, 将假定系统只有一个纯量控制输入 u 和一个纯量输出 y, 即仅考虑单输入单输出线性定常系统。 所谓伺服系统是用来控制被控对象的某种状态,使其能 自动地、连续地、精确地复现输入信号地变化规律,通常是 闭环控制系统。 下面首先讨论针对 I 型被控对象(被控对象含积分器)的 I 型闭环伺服系统的设计问题,然后讨论针对 0 型被控对象 (被控对象不含积分器)的 I 型闭环伺服系统的设计问题。
因此
* * a1* 14, a 2 56, a3 160
为了利用极点配置方法来确定矩阵 K,采用式(5.13) , 将其重写为
* * K [ a3 a3 a 2 a 2 a1* a1 ]P 1
(5.102)
由于式(5.96)已是能控标准形,所以 P = I。因此
Ax Bu ( A BK ) x Bk r x 1
(5.92)
设计 I 型闭环伺服系统,使得闭环极点配置在期望的位 置。这里设计的将是一个渐近稳定系统,y( )趋于常值 r(r 为阶跃输入),u( )趋于零。 在稳态时,
() ( A BK ) x() Bk1 r () x
u ( k 2 x 2 k 3 x3 ) k1 ( r x1 ) Kx k1 r 式中 K [k1 k2 k3 ] (5.98)
此时,就可用极点配置方法确定状态反馈增益矩阵 K。 现检验系统的能控性矩性。由于
0 1 0 Q [ B AB A 2 B ] 0 1 3 1 3 7 的秩为 3。因此,该系统是状态完全能控的,并且可任意配
从式(5.99)减去式(5.100) ,可得
(5.100)
(t ) x () ( A BK )[ x(t ) x()] x
定义
x(t ) x() e(t )
那么
(t ) ( A BK )e(t ) e
(5.101)
式(5.101)确定了误差的动态特性。给定被控系统的特征 方程为
x1 x k kn ] 2 k (r x ) 3 1 1 xn
(5.91)
Kx k r 1
式中
K [k k kn ] 1 2
假设在 t = 0 时施加参考输入(阶跃函数) 。因此 t > 0 时,该系统的动态特性由式(5.89)和(5.91)描述,即
K。 x(t)和 u(t)的稳态值求法如下:在稳态( t )时,由
式(5.92)可得
() 0 ( A BK ) x() Bk1 r x
由于 A-BK 的期望特征值均在 s 的左半平面,所以矩阵
A-BK 的逆存在。从而,x( )可确定为
x() ( A BK ) 1 Bk1 r
( A BK )e e
式(5.95)描述了误差动态特征。
(5.95)
因此,I 型闭环伺服系统的设计转化为:对于给定的任意 初始条件 e(0),设计一个渐近稳定的调节器系统,使得 e(t) 趋于零。如果由式(5.89)确定的系统是状态完全能控的, 则对矩阵 A-BK,通过指定的期望特征值μ1,μ2,…,μn, 可由 5.2 节介绍过的极点配置方法来确定线性反馈增益矩阵
(5.93)
注意,r(t)是阶跃输入。对 t > 0,有 r( )=r(t)=r(常 值)。用式(5.92)减去(5.93) ,可得
(t ) x () ( A BK )[ x(t ) x()] x
定义
(5.94)
x(t ) x() e(t )
因此,式(5.94)成为
Y ( s) 1 U ( s) s ( s 1)( s 2) 试设计一个 I 型闭环伺服系统,使得闭环极点为
2 j 2 3和 - 10 。假设该系统的结构与图 5.9 所示相同,参
考输入 r 是阶跃函数。 [解] 定义状态变量 x1,x2 和 x3 为
1 , x3 x 2 x1 y , x2 x
所以期望的特征方程为
( s 1 )( s 2 )( s 3 ) ( s 2 j 2 3 )( s 2 j 2 3 )( s 10) s 3 14s 2 56 s 160
* * s 3 a1* s 2 a 2 s a3 0
-----------------------------------------------------------------------------
5.7.2 被控系统中不含积分器时的 I 型闭环伺服系统的设计 如果被控系统中没有积分器(0 型被控系统) ,则设计 I 型闭环伺服系统的基本原则是在误差比较器和系统间的前 馈通道中插入一个积分器, 如图 5.11 所示 (当不含积分器时, 图 5.11 所示方块图是 I 型闭环伺服系统的基本形式) 。
( A BK ) x() Bk1 r
MATLAB Program 5.9
% ------ Unit-step response ------
% ***** Enter the state matrix A,control matrix B, output matrix C, % and direct transmission matrix D *****
ylabel(‘Output y’)
图 5.10
例 5.7 设计的系统之 y(t)对 t 的单位阶跃响应曲线
由于
0 ( A BK ) 1 0 160
所以
1 0
0 1 56 14
1
2 1 7 20 80 160 1 0 0 0 1 0
(5.103)
(5.104)
当 r 为单位阶跃函数时,求解式(5.103)和(5.104) , 即可得到 y(t) 对 t 的单位阶跃响应曲线。利用 MATLAB Program 5.9,将可轻松地求出单位阶跃响应。相应的单位阶 跃响应曲线如图 5.10 所示。
() 0 ,因此由式(5.100) 注意到 x ,可得
0 0 1 56 14 1
由式(5.99) ,可得此闭环反馈系统的状态方程为
1 0 x x 2 0 3 160 x
输出方程为
0 x1 0 0 1 x 2 0 r 56 14 160 x3 1 x1 y [1 0 0] x 2 x3
5.7.1 被控系统具有积分器的 I 型闭环伺服系统 考虑由下式定义的线性定常系统 Ax Bu x y Cx (5.89) (5.90)
式中, x R n , u R1, y R1, A R nn , B R n1, C R1n 。 如前所述,假设控制输入 u 和系统输出 y 均为纯量。选择 一组适当的状态变量,例如可以选择输出量等于其中的一个
由图中可得 Ax Bu x y Cx (5.105) (5.106) (5.107) (5.108)
u Kx k I
r y r Cx 式中,
x R n , u R 1 , y R 1 , R 1 , r R 1 , A R nn , B R n1 , C R 1n 。
则该被控系统的状态空间表达式为 Ax Bu x y Cx 式中 (5.96) (5.97)
1 0 0 0 , B 0, C [1 0 0] A 0 0 1 2 3 0 1 参见图 5.9 并注意到 n = 3,则控制输入 u 为
s sI A 0 0 s 3 3s 2 2 s
1 s 2
0 1 s3
s 3 a1 s 2 a2 s 0
因此 a1 3, a 2 2, a3 0 由于 A-BK 的期望特征值为
1 1 j 2 3, 2 2 j 2 3, 3 10
置极点。 将式(5.98)代入式(5.96) ,可得
Ax B ( Kx k1 r ) ( A BK ) x Bk1 r x
(5.99)
式中的 r 为阶跃函数。因此,当 t 趋于无穷时,x(t)趋于定 常向量 x( )。在稳态时,
() ( A BK ) x() Bk1 r x
* * K [ a3 a3 a 2 a 2 a1* a1 ]P 1
[160 056 214 3 ]I [160 54 11]