维宏系统安川伺服电机接线定义
伺服电机接线
伺服电机个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
安川伺服电机使用说明

强制风冷
强制风冷
多个驱动器安装示意图
运动随心,控制所欲
7
4.1.3 配线注意事项
伺服电机使用手册
序号
类型
配线类型
规格
备注
确认电缆的线径是否
1 2
电源电缆 电机电缆
线径合适、环境 合适
必须保证与信号电缆间隔 30 厘米以上 配线,禁止两者在同一配线槽
与所要求的电流相匹 配 确认电机相序与驱动 器要求一致
如有损坏,请立即联系产品供应商
3 核查伺服电机和驱动器型号的定义
运动随心,控制所欲
6
伺服电机使用手册
4 安装和配线
4.1.1 电机安装注意事项
安装位置:室内,无水、无粉尘、无腐蚀气体、良好通风; 如何安装:电机可以水平或垂直安装,当水平安装时,请把电缆出口朝下,以免进油进水;垂直安装 时,如果配有机械装置,必须保证机械装置的油、水不能进入电机; 禁止敲打电机后端盖,以免损坏电机的编码器; 请尽量使用弹性联轴器; 尽量避免敲打电机的轴端,以免损坏电机的轴承和后端的编码器; 需注意电机轴端的轴向和径向负载不要过大;
伺服电机使用手册
运动随心,控制所欲
14
3)多段速控制模式下参数: 必须修改参数:控制模式参数 51 设置为 0 需修改参数:电机转动方向参数 5B 0:正向 1:反向
伺服电机使用手册
运动随心,控制所欲
15
4.8
脉冲+方向
脉冲输入方式
脉冲 方向
PP-脉冲正,PG-脉冲负 DP-方向正,DG-方向负
塑料 4 芯插头 圆型航空插头
U 脚号 线色
1
红
2
红
插头的脚号和线色
V
W
安川SGMJV,SGMGV编码器与CDHD接线定义

测试安川电机样机:
1、电机型号:SGMJV-02A3(带20位编码器)。
2、编码器接线:
电机侧自带的连接器,它直接插入驱动器的反馈输入接口。
它是公头,针脚定义如下图截图所示:
电机侧编码器针脚定义如下图所示:“伺服单元侧”即上述公头,
母头的针脚定义及其延长线接线如下图示:
最终接线表:
功能 CDHD C4(26针) 线色 上述母头(6针) Data+ 1 棕 5 Data- 14 黑 6 5 VDC 11 紫 1 0 VDC
24
蓝
2
3、 电机规格:规格书上未提供电感、电阻、极数等信息。
实测电阻约为7.7 Ohm 。
通
过ZERO 1模式,读取极数为6。
2014-10-11补记:安川电机编码器与SERVOTRONIX CDHD 驱动器的连接
SERVOTRONIX CDHD 驱动器 安川电机编码器
信号名 C4接口(26针) 信号名 6针molex 连接器 Data+ 1 PS 5 Data- 14 /PS 6 5 VDC 11 PG 5V 1 0 VDC 24
PG 0V 2 电池正极 无(编码器直接接到电池)
BAT(+)
3
电池负极 无(编码器直接接到电池) BAT(-)
4
屏蔽
26
FG
壳体
20141029
1、安川SGMGV 马达编码器与CDHD 驱动器接线定义
最终接线表:
功能 CDHD C4(26针) 安川SGMGV 马达编码器(10针) Data+ 1 1 Data- 14 2 5 VDC 11 4 0 VDC
24
9
1
2 4 6
3 5
紫 红 棕
黑
黑 蓝。
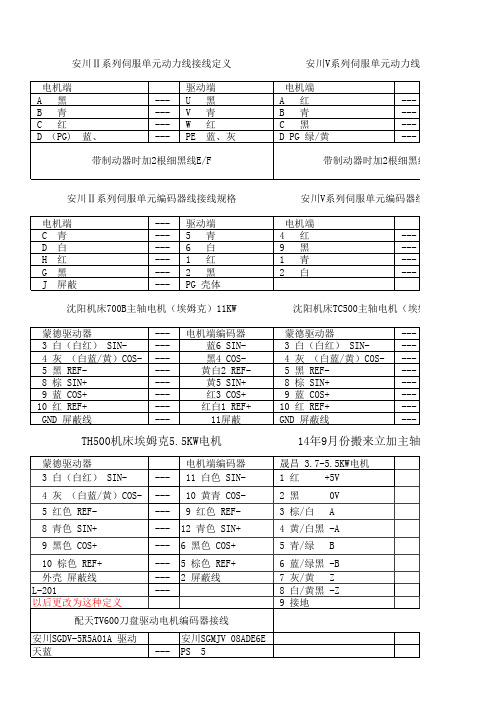
安川伺服单元接线规格
安川SGDV-5R5A01A 驱动
安川SGMJV 08ADE6E
天蓝
--- PS 5
晟昌 3.7-5.5KW电机 1 红 +5V
2黑
0V
3 棕/白 A
4 黄/白黑 -A
5 青/绿 B
6 蓝/绿黑 -B
7 灰/黄 Z 8 白/黄黑 -Z 9 接地
蓝 红 黑 橙 白橙 壳体
--- /PS 5 --- PG5V 1 --- PG0V 2
蒙德驱动2排 红1 黑9 棕2 黄 10 绿3 蓝 11 灰4 白 12
3 白(白红) SIN-
---
4 灰 (白蓝/黄)COS- ---
5 黑 REF-
---
8 棕 SIN+
---
9 蓝 COS+
---
10 红 REF+
---
GND 屏蔽线
---
电机端编码器 蓝6 SIN黑4 COS黄白2 REF黄5 SIN+ 红3 COS+ 红白1 REF+ 11屏蔽
蒙德驱动器
---
安川V系列伺服单元编码器线接线规格
电机端
--- 驱动端
电机端
C青
--- 5 青
4红---ຫໍສະໝຸດ D白--- 6 白
9黑
---
H红
--- 1 红
1青
---
G黑
--- 2 黑
2白
---
J 屏蔽
--- PG 壳体
沈阳机床700B主轴电机(埃姆克)11KW
沈阳机床TC500主轴电机(埃姆克)5.5KW
蒙德驱动器
---
3 白(白红) SIN-
---
4 灰 (白蓝/黄)COS- ---
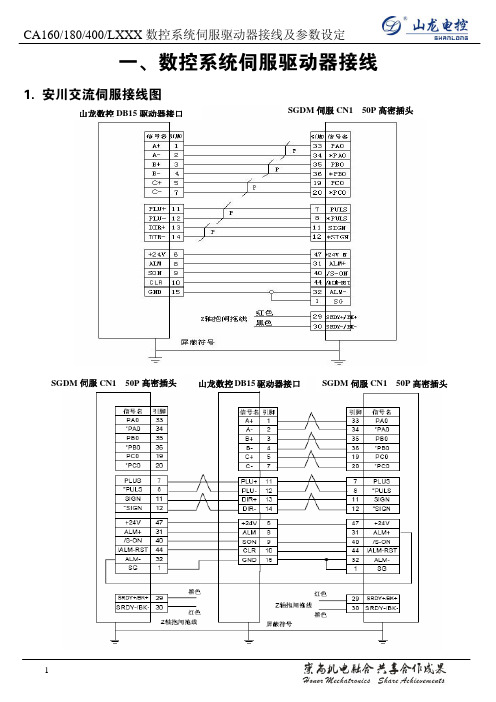
数控系统伺服驱动器接线及参数设定

数控系统伺服驱动器接线及参数设定数控系统是一种实现数控机床运动控制的系统,它通过数控程序控制伺服驱动器驱动电机实现机床各轴的精确定位和运动控制。
正确的接线和参数设定对于数控系统的稳定运行和良好性能至关重要。
一、数控系统伺服驱动器接线1.电源线接线:将电源线的两根火线分别接入伺服驱动器的AC1和AC2端口,将零线接入伺服驱动器的COM端口。
2.电动机线接线:将电动机的三根相线分别接入伺服驱动器的U、V、W端口,注意保持相序正确。
3.编码器线接线:将编码器的信号线分别接入伺服驱动器的A相、B相和Z相端口,注意保持对应关系。
4.I/O信号线接线:将数控系统的输入信号线分别接入伺服驱动器的I/O端口,将数控系统的输出信号线分别接入伺服驱动器的O/I端口。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定包括基本参数设定和运动参数设定。
1.基本参数设定:包括电源参数设定、电机参数设定和编码器参数设定。
-电源参数设定:设置电源电压和频率等基本参数,确保电源供电稳定。
-电机参数设定:设置电机类型、额定电流、极数等参数,确保驱动器与电机匹配。
-编码器参数设定:设置编码器型号、分辨率等参数,确保编码器信号精确反馈。
2.运动参数设定:包括速度参数设定、加速度参数设定和位置参数设定。
-速度参数设定:设置速度环的比例增益、积分增益和速度限制等参数,确保速度控制精度。
-加速度参数设定:设置加速度环的比例增益、积分增益和加速度限制等参数,确保加速度控制平稳。
-位置参数设定:设置位置环的比例增益、积分增益和位置限制等参数,确保位置控制准确。
3.其他参数设定:包括滤波参数设定、限位参数设定和插补参数设定等。
-滤波参数设定:设置滤波器的截止频率和衰减系数等参数,确保驱动器与电机的振动减小。
-限位参数设定:设置限位开关的触发逻辑和触发动作等参数,确保机床在限位时及时停止。
-插补参数设定:设置插补周期、插补梯度和插补速度等参数,确保插补运动的平滑与快速。
伺服电机接线
伺服电机接线问题个人日记 2009-09-12 10:17 阅读2 评论0字号:大中小一、按照驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻), SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。
构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
安川伺服电机说明书
YSKAWA安川∑Ⅱ数字交流伺服 安装调试说明书 (2004.7版本) 目 录 1. 安川连接示意图 2. 通电前的检查 3. 通电时的检查 4. 安川伺服驱动器的参数设定 5. 安川伺服驱动器的伺服增益调整 1. 安川连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在安川的保修范围!) 2. 通电前的检查 1) 确认安川伺服驱动器和电机插头的连接,相序是否正确: A.SGMGH电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D B.SGMGH电机 0.5KW-4.4KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 E 刹车电源 F 刹车电源为: DC90V (无极性) C. SGMGH电机5.5KW-15KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 电机制动器插头 刹车电源 A 刹车电源 B 刹车电源为: DC90V (无极性) 注: 1.相序错误,通电时会发生电机抖动现象。
2.相线与“接地”短路,会发生过载报警。
2)确认安川伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.安川伺服驱动器的参数设定 安川伺服驱动器参数,操作方法如下:(1)参数密码设定; (2)用户参数和功能参数的设定; 1)参数密码设定 为防止任意修改参数,将“Fn010”辅助功能参数,设定: ・ “0000” 允许改写 PnXXX 的用户参数,及部分辅助功能“FnXXX”参数。
数控系统伺服驱动器接线及参数设定
7
BRK-OFF
-9-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
伺服电机基础接线操作示意

伺服电机基础接线操作示意
在工业控制领域中,伺服电机是一种控制精度高、响应速度快的电动执行器,被广泛应用于自动化设备中。
伺服电机的接线操作对于整个设备的正常运行至关重要。
下面将介绍伺服电机的基础接线操作示意。
1. 准备工作
在进行伺服电机接线操作前,首先需要明确每个电缆的颜色及其对应的功能。
通常伺服电机的电缆包含编码器反馈线、电源线、控制器通讯线等。
2. 接线步骤
步骤一:电源线接线
将伺服电机的电源线连接到电源输入端子。
确保电源的极性正确,否则会影响电机的正常工作。
步骤二:编码器反馈线接线
将伺服电机的编码器反馈线连接到相应的编码器接口。
编码器反馈线的连接有助于控制系统实时监测电机位置和速度。
步骤三:控制器通讯线接线
根据控制器的要求,将伺服电机的通讯线接入到控制器的通讯接口。
通讯线的连接能够让控制系统实现对电机的精准控制。
步骤四:接地线接线
为了确保设备安全,伺服电机的接地线也需要正确连接到设备的接地端子上。
步骤五:接线固定
在接线结束后,务必检查每根电缆的连接是否牢固,并使用绝缘胶带或绑带将电缆固定在适当位置,防止碰撞或拉扯导致断线。
3. 调试验证
接线完成后,需进行合适的调试和验证工作。
可通过控制系统操作电机,观察其运动是否正常,以确保接线没有问题。
通过以上步骤,我们可以完成伺服电机的基础接线操作示意。
正确的接线操作不仅可以确保设备的正常运行,还能提高设备的稳定性和可靠性。
希望以上内容能对您有所帮助。
伺服驱动器外部接线与详细说明
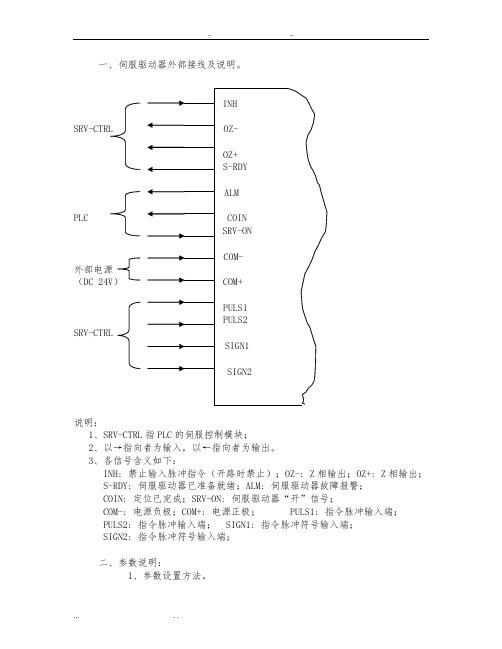
一、伺服驱动器外部接线及说明。
SRV-CTRLPLC外部电源(DC 24V)SRV-CTRL说明:1、SRV-CTRL指PLC的伺服控制模块;2、以→指向者为输入,以←指向者为输出。
3、各信号含义如下:INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出;S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警;COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号;COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲输入端;PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端;SIGN2: 指令脉冲符号输入端;二、参数说明:1、参数设置方法。
操作面板上共有5个按键,意义如下:MODE:模式转换键,按此键可在4个模式间切换,这4个模式是:DP-××××: 选择监视项目(共有7个, 在按 MODE键显示DP-××××后先按SET,再按↑或↓选择)⑴、DP-EPS: 位置偏差;⑵、DP-SPD: 转速;⑶、DP-TRQ: 转矩;⑷、DP-CNT: 控制方式;⑸、DP-IO: 输入输出信号状态;⑹、DP-ERR: 错误信息;⑺、DP_NO: PR-××××: 设定参数。
EE-××××: 写入参数。
AT-××××: 自动增益调整。
SET:为设定及确认键。
↑:数值增加或移动到下一个选项;↓:数值减少或移动到上一个选项;←:数位间移动;具体设置步骤详见有关Driver的补充信息说明:1、参数后加“#“者为需要更改的,如02号参数实际应用中应设为0;2、控制方式含义T:转矩控制S:速度控制P:位置控制3、出厂设定为”*”者为出厂时未设置,需根据实际自行设置;4、其余参数可使用出厂设置;5、最后一栏为新Driver与之对应的参数(有些没有);6、更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对应的参数;7、以下表格为Driver实际参数设置表。
安川5系列耐环境型伺服接线及基本参数设置说明

一、 安川5系列伺服调试如下:(1)接线说明: 1、电源线连接 单相200V 电源接线三相200V 电源接线电源端 驱动器端 电源端 驱动器端L L1 R L1N L2 S L2L3 T L3FG 外壳接地 FG 外壳接地 L L1C R L1CN L2C注意:1、SGMJV 、SGMA V 系列伺服供电电源为单相AC200V 时,电源接线时L3端子上不需接线,只需将驱动器Pn00B 参数默认0000改成0101即可;2、SGMGV 、SGMSV 系列伺服供电电源为三相AC200V 供电;3、控制电源L1C 与L2C 接AC200V 电源;4、供电电源允许偏差±10%;T L2C2、电机与驱动器连接接线图:(此部分连接线与标准型号不同) SGMJV 系列伺服接线图 (单位mm )动力线相与相、相与地之间不允许短路,如因短路造成伺服损坏,后果自负!电机侧插头端子1 U2 V3 W4 FG5 +24 接刹车6 0V编码器线(可用4×0.2带屏蔽线)电机端驱动器端1 +5V 12 0V 2 5 PS 5 6 /PS 6 外壳 FG 外壳注意:1、编码器线需带屏蔽双绞电缆线,外屏蔽与两端端子外壳需连接可靠;2、动力线电机侧4号端子,请切记连接驱动器外壳接地;3、动力线相与相、相与地线之间不允许短路,如由于用户接线错误或短路引起伺服损坏,后果自负;(2)参数设置: 1、增益参数调整设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn100 速度环增益0.1Hz 400 1000 加大数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动Pn101 速度环积分时间参数0.01ms 2000 1500 减小数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动 Pn102 位置环增益0.1/s 400 1000 加大数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动Pn103 转动惯量比% 100 150 先使用安川调试软件进行自动整定,再进行手动微调Pn401 扭矩指令滤波器时间参数0.01ms10030 减小数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动1、将Pn170第0位设置为0,使免调整功能无效;2、使用安川调试软件进行转动惯量及增益自整定;3、手动进行在线增益微调2、位置控制模式参数设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn000功能选择 ——00000010位置控制(脉冲序列指令),正转指令时正转Pn170免调整类开关 ——14012201使免调整功能有效,根据负载大小进行参数调整Pn200位置控制指令形态选择开关 ——00000001默认是符号+脉冲,正逻辑;例上位机提供指令形态为CW+CCW,正逻辑的设置Pn20E电子齿轮比(分子) 148192设定值以13位编码器为例,即为电机编码器分辨率Pn210电子齿轮比(分母)115000设定电机转一圈所需的脉冲数Pn212编码器分频脉冲数 1P/Rev20481250设定编码器每圈脉冲数经伺服驱动器倍频反馈给上位机Pn50A输入信号选择1——21008100内部参数设置允许正转侧驱动Pn50B输入信号选择2——65436548内部参数设置允许反转侧驱动3、速度控制模式参数设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn000功能选择 ——00000000速度控制(模拟量指令)正转指令时正转Pn170免调整类开关 ——14012101使免调整功能有效,根据负载大小进行参数调整Pn212编码器分频脉冲数 1P/Rev20481250设定编码器每圈脉冲数经伺服驱动器倍频反馈给上位机Pn300速度指令输入增益 0.01v/额定转速6001000例:以指令为DC10V时,电机以额定转速运行Pn50A输入信号选择1——21008100内部参数设置允许正转侧驱动Pn50B输入信号选择2——65436548内部参数设置允许反转侧驱动4、带刹车伺服需要设置的参数:参数No.名称 设定单位 出厂值 设定值 设定说明 Pn50E输出信号选择1——32110000设置为所对应的输出信号无效Pn50F输出信号选择2——00000100例:从CN1-25、26输出端子输出制动器信号(/BK)二、 输入输出信号的连接:1、位置控制的连接示例:2、速度控制的连接示例:三、部分参数一览:。
伺服电机接线图与原理
伺服电机接线图与原理
伺服电机是一种具有高精度、高稳定性的电机,广泛应用于自动控制系统中。
在伺服电机的应用中,正确的接线和了解其工作原理是非常重要的。
一、伺服电机的原理
伺服电机的工作原理基于电机在受控制的情况下通过电子反馈系统实现位置、
速度或角度的精确控制。
它通常由三个主要部分组成:电机本身、传感器和控制器。
1.电机:伺服电机通常是直流电机或交流电机,具有较高的转速和响应
速度。
它的转子位置由控制器通过电流控制。
2.传感器:传感器用于检测电机的位置、速度或角度,并将反馈信号发
送给控制器,以便调节电机的工作状态。
3.控制器:控制器是伺服系统的大脑,根据传感器返回的信息对电机的
工作状态进行调节和控制,以实现精确的位置、速度或角度控制。
二、伺服电机的接线图
在接线伺服电机时,通常会有几根线需要连接到不同的位置,下面是一个简单
的伺服电机接线图示例:
- 红色线:连接到电机的正极
- 黑色线:连接到电机的负极
- 白色线:连接到传感器的信号线
在实际接线时,需要根据具体的伺服电机型号以及控制系统的要求来连接不同
的线路。
在接线时一定要确保极性正确,避免短路或损坏电机。
同时,传感器的信号线也需要正确连接以确保传感器能够正常工作并将反馈信号传送给控制器。
三、总结
理解伺服电机的原理以及正确的接线方式对于确保伺服系统稳定运行至关重要。
通过合理的接线和正确的操作,可以实现精确的位置控制和高效的自动化生产。
希望本文对你有所帮助,感谢阅读!。
维宏系统安川伺服电机接线定义
安川SGSM伺服驱动器与6B-EX1端子板连线图及其参数表
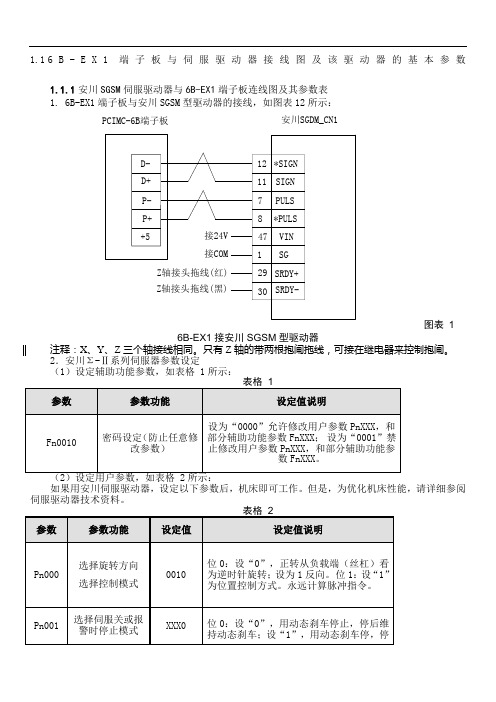
1.6B-EX1端子板与安川SGSM型驱动器的接线,如图表12所示:
图表16B-EX1接安川SGSM型驱动器
注释:X、Y、Z三个轴接线相同。只有Z轴的带两根抱闸拖线,可接在继电器来控)设定辅助功能参数,如表格1所示:
表格1
参数
参数功能
设定值说明
Fn0010
密码设定(防止任意修改参数)
设为“0000”允许修改用户参数PnXXX,和部分辅助功能参数FnXXX;
设为“0001”禁止修改用户参数PnXXX,和部分辅助功能参数FnXXX。
(2)设定用户参数,如表格2所示:
选择伺服关或报警时停止模式
XXX0
位0:设“0”,用动态刹车停止,停后维持动态刹车;设“1”,用动态刹车停,停后可自由转动;
Pn200
选择脉冲指令方式
XXX5
位0:设为“5”,选择输入指令方式为脉冲加方向、负逻辑;
Pn50A
选择功能
8170
位1:设“0”,启用/S-ON信号,从40脚输入;设为“7”伺服器永远为ON。位3:设“8”,不使用正转禁止输入信号P-OT。
Pn50B
选择功能
6548
位0:设“8”不使用反转禁止输入信号N-OT。
Pn50F
选择功能
0300
伺服电机带制动器时设置;
位2:设为“3”,从CNI-29、30输出刹车互锁信号/BK,控制刹车用的24V继电器。
Pn50E
选择功能
0000
伺服电机带刹车时设置;
四位数中不能有“3”,防止CN1-29、CN1-30脚复用为其它功能,以致刹车失效。
安川伺服
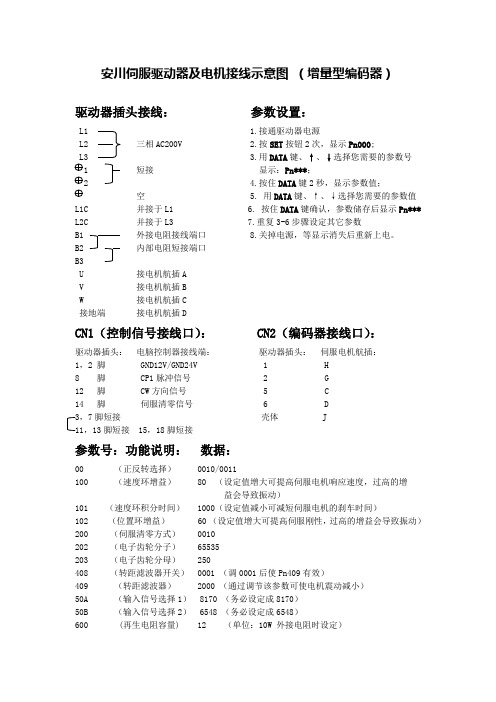
安川伺服驱动器及电机接线示意图(增量型编码器)驱动器插头接线:参数设置:L1 1.接通驱动器电源L2 三相AC200V 2.按SET按钮2次,显示Pn000;L3 3.用DATA键、↑、↓选择您需要的参数号1 短接显示:Pn***;2 4.按住DATA键2秒,显示参数值;空 5. 用DATA键、↑、↓选择您需要的参数值L1C 并接于L1 6. 按住DATA键确认,参数储存后显示Pn*** L2C 并接于L3 7.重复3-6步骤设定其它参数B1 外接电阻接线端口 8.关掉电源,等显示消失后重新上电。
B2 内部电阻短接端口B3U 接电机航插AV 接电机航插BW 接电机航插C接地端接电机航插DCN1(控制信号接线口): CN2(编码器接线口):驱动器插头:电脑控制器接线端:驱动器插头:伺服电机航插:1,2 脚 GND12V/GND24V 1 H8 脚 CP1脉冲信号 2 G12 脚 CW方向信号 5 C14 脚伺服清零信号 6 D,7脚短接壳体 J,13脚短接 15,18脚短接参数号:功能说明:数据:00(正反转选择) 0010/0011100(速度环增益) 80 (设定值增大可提高伺服电机响应速度,过高的增益会导致振动)101(速度环积分时间) 1000(设定值减小可减短伺服电机的刹车时间)102 (位置环增益) 60 (设定值增大可提高伺服刚性,过高的增益会导致振动)200 (伺服清零方式) 0010202 (电子齿轮分子) 65535203 (电子齿轮分母) 250408(转距滤波器开关) 0001 (调0001后使Pn409有效)409 (转距滤波器) 2000 (通过调节该参数可使电机震动减小)50A (输入信号选择1) 8170 (务必设定成8170)50B (输入信号选择2) 6548 (务必设定成6548)600 (再生电阻容量) 12 (单位:10W 外接电阻时设定)。
数控系统伺服驱动器接线及参数设定

数控系统伺服驱动器接线及参数设定数控系统是一种将数字信号转化为机电信号控制机床动作的系统,其中伺服驱动器是数控系统的重要组成部分。
接下来将详细介绍数控系统伺服驱动器接线及参数设定的相关内容。
一、数控系统伺服驱动器接线1.电源接线:伺服驱动器需要接入适配的电源,以提供稳定的电源电压。
通常有三种常用的电源接线方式:单相220V接线、三相380V接线、单相220V与三相380V混合接线。
-单相220V接线:适用于功率较小的伺服驱动器。
通常需要连接L、N和G三根导线,L为火线,N为零线,G为地线。
-三相380V接线:适用于功率较大的伺服驱动器。
通常需要连接主线和辅助线。
主线有三根导线:R、S、T分别为三相电的火线,辅助线为PE 线,用于连接设备的接地线。
-单相220V与三相380V混合接线:适用于一些特殊场合,需根据具体情况进行接线。
2.控制信号接线:伺服驱动器需要接收数控系统发出的控制信号,以控制机床的动作。
通常有以下几个常用的控制信号接线方式:-脉冲信号接线:通常需要连接PUL+、PUL-、DIR+和DIR-四个接口。
PUL+为脉冲信号正极,PUL-为脉冲信号负极,DIR+为方向信号正极,DIR-为方向信号负极。
-使能信号接线:通常需要连接ENA+和ENA-两个接口。
ENA+为使能信号正极,ENA-为使能信号负极,当ENA+处于高电平时,伺服驱动器处于使能状态。
-报警信号接线:通常需要连接ALM+和ALM-两个接口。
当伺服驱动器发生故障或异常情况时,会产生报警信号,通过连接报警信号接口,可以及时响应故障并采取相应的措施。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定是为了使其能够更好地适应具体的机床加工需求,提高加工精度和效率。
1.速度参数设定:包括加速时间、减速时间、最大速度等参数的设定。
通过合理设定速度参数,可以控制机床的加工速度,以满足不同工件加工的需求。
2.位置参数设定:包括回零速度、回零位置、绝对位置、相对位置等参数的设定。
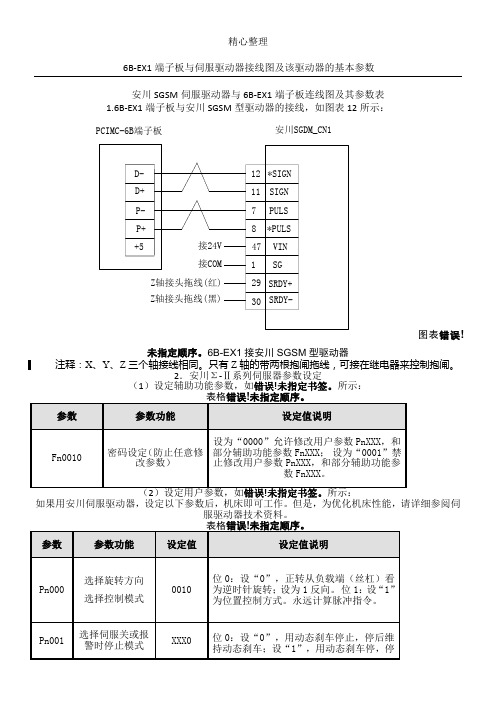
维宏系统安川伺服电机接线定义
1.1 6B -E X 1端子板与伺服驱动器接线图及该驱动器的基本参数
1.1.1 安川SGSM 伺服驱动器与6B-EX1端子板连线图及其参数表 1. 6B-EX1端子板与安川SGSM 型驱动器的接线,如图表12所示:
SRDY-
Z轴接头拖线(黑)
Z轴接头拖线(红)接COM
接24V 30SRDY+29SG
1
VIN 47*PULS 8PULS
7SIGN 11*SIGN 12+5
P+P-D+D-PCIMC-6B端子板
安川SGDM_CN1
图表 1
6B-EX1接安川SGSM 型驱动器
注释:X 、Y 、Z 三个轴接线相同。
只有Z 轴的带两根抱闸拖线,可接在继电器来控制抱闸。
2.安川Σ-Ⅱ系列伺服器参数设定
(1)设定辅助功能参数,如表格 1所示:
如果用安川伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
伺服电机接线方式

富士伺服电机富士伺服电机电子齿轮比计算:伺服电机旋转1周时的机械系统移动量131072脉冲/转例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲N α(分母) N 131072 β(分子) 2500α(分母) 131072 32768 β(分子) 2500 625I/O 信号接线P241 24V 电源19 24V cont12 激磁 *CA8 脉冲 *CB21 方向 M2414 0V OUT117 报警 16 到位结束编码器接线方式(smart 系统、w 系列、A5)驱动器电机端 P51 7 P5 M52 8 M5 SIG+5 5 SIG+ SIG-6 4 SIG- BAT+3 1 BAT+ BAT-4 2 BAT- GND 外壳 3 地线旧版富士驱动器参数设置 新版富士驱动器参数设置 1# 16384(分子) 1# 02# 125(分母) 3# 0(脉冲+方向控制模式) 3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8#15# 14(刚性)× = = =松下伺服电机松下A5 I/O接线说明:1、2、7 24V36、41 0V4 脉冲6 方向29 使能ON37 报警松下A5编码器接线说明:驱动器马达1 42 55 26 3外壳 6(GND)松下A5驱动器参数设置Pr0.**0# 方向1# 控制模式 07#指令脉冲形式 38#电机旋转一圈指令脉冲数台达伺服电机台达电子齿轮比计算公式:马达转一圈脉冲数(F)=1.280.000÷分子(N)/分母(M)台达编码器接线说明:驱动器接头端马达端5 14 414、16 713、16 8屏蔽线 9台达伺服电机I/O控制说明:9 使能ON28 报警30 停止37 方向41 脉冲35、1 24V27、4、45、49 0V5 定位结束台达驱动器参数设定:P1-00 2(脉冲+方向)P1-44 分子(1280000)P1-45 分母(1000)P2-31 刚性P2-32 增益调整方向P2-19 105P1-54 256(如马达转一圈1000脉冲设为256,表示偏差10个脉冲)。
伺服电机接线方式
伺服电机接线⽅式⼯控⾃动化领域,伺服电机是绕不开的⼀个产品。
在这个⾏业,要求每⼀个⼯程师必须了解伺服的基本使⽤⽅法。
今天我们就来聊聊伺服电机如何接线?先来认识⼀下什么是伺服电机:伺服这个词语来⾃于Servus(英语为Slave:奴⾪),所谓的伺服电机系统,其实就是⼀个可以被实时控制的电机:你让它⾛1mm,它就⾛1mm;让它⾛到什么位置就什么位置,让它先快后慢,就先快后慢。
伺服电机应⽤中的三种类型:(这个有助于不少⼈提前理解伺服电机)1、速度模式,例如需要快速的加减速。
这种应⽤最典型的⼀种就是,舞台上⾯吊起来的灯光球,就是快速的加减速。
2、⼒矩模式(也被称为转矩模式),这就是恒定的输出⼒,⼒矩不变,例如:线切割机,⾦刚⽯切割机。
机床上⾯的主轴,进给轴都是伺服电机,主要也是这个功能。
(当然还搭配其他的两个功能)3、位置模式。
也就是可以精确的控制位置,所谓的控制位置,其实就是控制伺服电机转动的⾓度。
⼀个电机转动多少度,是依靠的编码器来计数的。
编码器两种类型编码器这三种模式在使⽤中,并不是独⽴分开的,但经常的状态是以⼀种主要的功能突出出来。
伺服电机的基本结构:伺服驱动器(也被称为伺服放⼤器)+电机(Motor,也被称为马达)。
伺服驱动器,伺服电机(1)伺服驱动器,也叫做伺服放⼤器。
从上位机,PLC,或者是运动控制器发过来的位置指令,给到了驱动器,驱动器会将数值信号,或者是模拟量信号,转化为速度,然后转化为电流的⼤⼩,控制电机的转动。
毕竟电机只能识别电流,其他啥信号也识别不了。
驱动器⼯作原理(2)伺服电机:伺服电机其实就是⼀个普通的电机+编码器+电磁抱闸(有不带抱闸的电机)。
所谓的伺服的抱闸,其实就是⼀个电磁开关,断电后,抱闸⾃动吸住定⼦,让定⼦转动不了。
这种应⽤在起重机上⾯,那都是必备的存在。
包括冲压机,各类机床上⾯,都⼀定是要抱闸的。
也就是断电必须能够停下来。
(这也就是急停状态下,快速的保护功能)介绍完这些功能,不少⼈应该有⼀些理解伺服电机的应⽤以及整体结构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1 6B-EX1端子板与伺服驱动器接线图及该驱动器的基本参数
1.1.1 安川SGSM 伺服驱动器与6B-EX1端子板连线图及其参数表 1. 6B-EX1端子板与安川SGSM 型驱动器的接线,如图表12所示:
SRDY-
Z轴接头拖线(黑)
Z轴接头拖线(红)接COM
接24V 30SRDY+29SG
1
VIN 47*PULS 8PULS
7SIGN 11*SIGN 12+5
P+P-D+D-PCIMC-6B端子板
安川SGDM_CN1
图表 1
6B-EX1接安川SGSM 型驱动器
注释:X 、Y 、Z 三个轴接线相同。
只有Z 轴的带两根抱闸拖线,可接在继电器来控制抱闸。
2.安川Σ-Ⅱ系列伺服器参数设定
(1)设定辅助功能参数,如表格 1所示:
(2)设定用户参数,如表格 2所示:
如果用安川伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。