光电自动循迹小车 线路板焊接
小车循迹电路设计方案
小车循迹电路设计方案小车循迹电路设计方案一、设计需求设计一款小车循迹电路,使其能够自动寻路,沿着黑线行驶。
二、设计方案1. 传感器选择选择红外线传感器作为寻线传感器。
红外线传感器能够感知黑线的反射光,从而确定小车的位置。
2. 电路连接将红外线传感器与单片机连接。
传感器的输出信号经过单片机的处理,控制小车的运动。
3. 运动控制根据传感器输出的信号,确定小车需要向左还是向右转弯。
如果传感器探测到黑线,小车保持直行;如果传感器没有探测到黑线,小车向右转弯,以寻找黑线。
4. 电源供应为了保证小车的稳定运行,选择适合的电源供应方式。
可以使用电池供电,电池电压适宜,容易携带。
三、电路图见附件。
四、硬件选型1. 单片机:选择一款性能较好的单片机,如ATmega328P,具有较强的处理能力和丰富的外设接口。
2. 传感器:选择高灵敏度的红外线传感器,如TCRT5000,可感知黑线的反射光。
3. 驱动电机:选择合适的直流电机作为小车的驱动装置,可根据小车的重量和负载情况选择合适的电机转速。
4. 电源:选择适合的电池供电,如锂电池或镍氢电池,电压稳定,容量适宜。
五、测试与优化完成电路连接后,进行测试。
将小车放置在黑线上,观察小车能否自动寻路、沿着黑线行驶。
根据测试结果,对电路进行优化,如调整红外线传感器的灵敏度、增加过滤电容等,以提高小车的稳定性和准确性。
六、总结通过以上的设计方案,可以实现小车循迹电路的基本功能。
在实际应用中,还可以添加其他功能,如避障功能、自动停车等,以提升小车的性能和实用性。
附件:电路连接图[图片]。
光电自动循迹小车 线路板焊接
光电自动循迹小车的制作第一课时线路板的焊接学科:高中劳技-电子技术教材:《劳动技术》高中二年级教师:光电自动循迹小车的制作课时1课时(40分钟)课题——线路板的焊接一、教材分析本节课内容取自高二年级电子技术第二章“电子控制技术”的第四节“电子控制系统实例——光电自动循迹小车”。
这部分内容主要以光电自动循迹小车为平台,通过对光电自动循迹小车的电路分析、制作、调试,了解电子控制系统的构成及各构成部分的作用,同时让每个学生自己动手、参与制作。
这部分内容整个完成需要5—6 课时,本节课为第1课时。
作为这部分内容的第一课时,本节设计思路是首先利用一些电子控制系统的实例,让学生了解电子控制系统的构成与作用,然后利用电子控制系统的构成对光电自动循迹小车的电路进行分析,全面了解光电自动循迹小车的主体结构——输入部分、控制部分和输出部分;其次,在全面了解了光电自动循迹小车的结构以后,进行光电自动循迹小车的线路板的焊接。
二、学生分析学生通过高二前面很长一段时间的学习,已经会识别与测量一些常用的元器件,会通过焊接来制作电路。
本节课在学生的这个基础上让学生先从理论分析,再到实践操作,进而获得知识,培养能力。
教学目标:知识与技能目标:1、了解光电自动循迹小车的主体结构——输入部分、控制部分和输出部分;2、能识读光电自动循迹小车的电路原理图;3、了解电子元件安装的工艺,能掌握焊接技术。
过程与方法目标:1、识读原理图时,学会分析光电自动循迹小车的输入部分、控制部分和输出部分所对应的三部分电路;2、通过元件的安装与焊接,体会焊接时电子元件焊接的顺序、电子元件焊接时的高度对产品质量的直接影响,在制作过程中,不断完善、优化自己的制作工艺;3、通过展示、交流,进一步提高制作能力。
情感目标:1、培养一丝不苟的科学态度和良好的质量意识;2、通过学生自己制作光电自动循迹小车所带来的成功与喜悦,激发学生学习电子技术的兴趣。
教学重点:(1)“光电自动循迹小车”电路原理图识读;(2)“光电自动循迹小车”线路板的焊接。
光电智能循迹小车制作
、ST188光电传感器:
特点:
1.采用高发射功率红外发光二极管 和高灵敏度光电晶体管组成。 2.检测距离可调范围大,4-13mm 可用。 3.采用非接触检测方式。 (AK发射,CE接收)
、LM393:
特点: 1.含有两路电压比较器。 2.消耗电流小, ICC=0.8mA; 输入失调电压小, VIO=±2mV; 3.输出与TTL,DTL,MOS,CMOS 等兼容;
功能:放大输入信号 驱动电机。
组装:(I/O连接时参考程序I/O定义)
二、软件
1.用keil3对单片机进行程序编写。 2.用AVR fighter 进行程序烧写。
keil主页面:
AVR figLeabharlann ter主页面:最后:在跑道上进行调试。
谢谢!
、103电位器:
特点: 1.10k电阻可调。 2.使用简单。 (就是一个10k的可调电阻)
传感器模块电路图:
电路图:一路传感器(一共5路)
主控模块:
单片机最小系统 基本结构组成: 单片机底座 数据下载底座 自锁开关 排阻 LED 晶振电路 复位电路
驱动模块:
1.直流电机 2.L298N电机驱动模块 (4路输入4路输出)
光电智能循迹小车制作
12级自动化2班 河南理工大学万方科技学院 焦腾飞(学号:1216306xxx) 杨文涛(学号:1216306xxx)
作品简介:
智能小车以51系列单片机为核心控制,应用L298N驱动 直流电机,采用ST188红外光电传感器对小车进行循迹控 制。 小车通过红外传感器获取地面黑线信息,将采集到的 信号送给单片机,通过单片机分析,控制小车两侧直流电 机,利用小车左右两侧电机的转速差进行转向(转大弯、 转小弯)或直走,进而实现小车黑线路线路前进。
巡线小车 实验报告
巡线小车实验报告巡线小车实验报告引言:巡线小车是一种能够自主巡线的机器人,它能够通过感知地面上的线条,进行自主导航和行动。
本实验旨在探索巡线小车的工作原理和应用场景,并通过实际操控巡线小车,验证其性能和功能。
一、巡线小车的原理巡线小车的核心原理是利用光电传感器感知地面上的线条,并通过控制电机的转速和方向,实现自主巡线。
在巡线小车的底部,安装有一组光电传感器,它们能够感知地面上的亮度变化。
当小车行驶在线条上时,光电传感器会感知到线条的亮度高于周围环境,从而根据传感器的输出信号来控制电机的运动。
二、巡线小车的搭建和调试为了搭建巡线小车,我们首先需要准备一台底盘,然后在底盘上安装电机和光电传感器。
接下来,我们需要使用电路板将电机和光电传感器与主控制器连接起来。
在连接完成后,我们需要编写控制程序,并将其烧录到主控制器中。
在调试过程中,我们需要根据实际情况调整光电传感器的灵敏度和阈值,以确保巡线小车能够准确地感知线条。
此外,我们还需要调整电机的转速和方向,以确保巡线小车能够沿着线条正确行驶。
通过不断的调试和优化,我们最终成功搭建了一台能够自主巡线的小车。
三、巡线小车的应用场景巡线小车具有广泛的应用场景。
首先,它可以应用于工业生产线上的物料搬运,通过巡线小车的自主导航能力,可以实现物料的自动搬运和分拣,提高生产效率。
其次,巡线小车还可以应用于仓库管理和物流配送。
它能够根据线条进行导航,自动将货物从仓库中取出,并将其送到指定的位置,大大降低了人力成本和运营风险。
此外,巡线小车还可以应用于智能家居领域。
通过在家中铺设线条,巡线小车可以自主巡逻,检测家居环境是否安全,并及时报警。
同时,巡线小车还可以帮助家庭成员寻找遗失的物品,提高生活的便利性。
结论:通过本次实验,我们深入了解了巡线小车的工作原理和应用场景。
巡线小车作为一种具有自主导航能力的机器人,具有广泛的应用前景。
未来,随着技术的不断进步和创新,巡线小车将在各个领域发挥更加重要的作用,为人们的生活带来更多的便利和效益。
《电子技术实训》循迹小车
《电子技术实训》循迹小车摘要:电子技术实训是职业教育中的重要实践教学环节。
它对学生掌握基本的理论知识,运用基本知识,训练基本技能,增强实践本事,对到达职业教育培养目标的要求有着十分重要的意义和作用。
它是我们从学校走向社会工作岗位的一个纽带和桥梁,是我们由学生主角向工人主角转换的训练和检验。
在将来的就业中,动手本事,实践经验等等都是很重要的。
使学生对电气元件及电工技术有必须的感性和理性认识,对电工技术等方面的专业知识做进一步的理解。
同时,经过实习得实际生产知识和安装技能,掌握元件的工作原理,电工技术知识及掌握电子线路的基本原理、基本方法。
掌握经过电路图安装与调试技术。
经过具体的电路图,初步掌握简单电路元件装配、初步的焊接技术及对故障的诊断和排除。
培养学生理论联系实际的本事,提高分析问题和解决问题的本事,增强独立工作本事,培养学生团结合作,共同探讨,共同前进。
关键字:合作;元件;电路;实践;原理1 绪论1.1实训意义电子技术实训的主要目的是培养学生的动手本事。
对一些常用的电子设备有一个初步的了解,能够自我动手做出一个像样的东西来。
电子技术的实习要求我们熟悉电子元器件、熟练掌握相关工具的操作以及电子设备的制作、装调的全过程,从而有助于我们对理论知识的理解,帮忙我们学习专业的相关知识。
培养理论联系实际的本事,提高分析解决问题本事的同时也培养同学之间的团队合作、共同探讨、共同前进的精神。
1.2实训器材(1)电烙铁:由于焊接的元件多,所以使用的是外热式电烙铁,功率为30w,烙铁头是铜制。
(2)螺丝刀、镊子等必备工具。
(3)锡丝:由于锡它的熔点低,焊接时,焊锡能迅速散步在金属表面焊接牢固,焊点光亮美观。
(4)循迹小车的材料(包含小车底板,光敏电阻,探照感应灯等元件)1.3实训资料图纸和教学视频2 步骤(一)熟悉电路元件,掌握烙笔的使用方法(二)循迹小车装配零件,检查和熟悉各种零件(三)熟悉循迹小车的装配图(四)焊接各种零件及进行最终的组装。
巡迹小车实验报告
巡迹小车实验报告
【原创版】
目录
1.实验目的
2.实验设备与材料
3.实验步骤
4.实验结果与分析
5.实验结论
正文
一、实验目的
本次实验的主要目的是通过制作和测试巡迹小车,了解并掌握机器人的控制原理及其在实际应用中的表现。
巡迹小车作为一种基础的机器人系统,可用于研究传感器、执行器、控制算法等方面的技术,为后续的机器人开发奠定基础。
二、实验设备与材料
1.巡迹小车套件
2.电脑
3.面包板
4.跳线
5.电子元件(如电阻、电容等)
6.工具(如镊子、钳子等)
7.5V 电源
三、实验步骤
1.准备阶段:检查实验设备是否齐全,将面包板、电子元件等摆放在桌面上,为接下来的焊接工作做好准备。
2.焊接阶段:根据电路图和说明书,将电阻、电容等元件焊接到面包板上,并连接电源、电机等设备。
3.调试阶段:使用电脑上的编程软件对小车进行编程,设置其运动轨迹和速度等参数,并通过串口通信将程序下载到小车。
4.测试阶段:将小车放置在实验平台上,观察其运动轨迹是否正确,调整参数以达到最佳效果。
四、实验结果与分析
经过多次调试和测试,巡迹小车能够准确地按照预定轨迹行驶,运动速度和方向控制准确。
这表明本次实验中,我们成功地掌握了机器人的控制原理,并为后续的机器人研究和开发积累了经验。
五、实验结论
本次巡迹小车实验的成功,证明了我们团队在机器人领域的研究能力。
通过这次实验,我们不仅学会了如何制作和控制巡迹小车,还深入了解了机器人的构造和运行原理。
寻迹避障小车原理

循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
巡线模块教程
巡线模块教程巡线模块(Line Follower Module)是一种基于传感器技术的电子元件,常用于机器人或智能小车中,用于实现自动巡线功能。
本教程将详细介绍巡线模块的原理、使用方法以及相关注意事项,帮助初学者快速上手。
一、巡线模块原理巡线模块的原理基于光电传感器,通过检测地面上的光线来确定小车的运行路径。
一般巡线模块由发光二极管(LED)和接收光敏电阻(photoresistor)组成。
通过LED发射红外线,并利用光敏电阻接收地面反射回来的红外线信号。
根据光敏电阻接收到的光强度来判断小车当前位置,进而调整小车行驶方向。
二、巡线模块的使用巡线模块的使用相对简单,只需将其与单片机或者控制器连接,通过编程控制来实现小车的自动巡线功能。
以下是一般的连接方式:1. 将巡线模块的VCC引脚连接到单片机的正电源,一般为3.3V或者5V;2. 将巡线模块的GND引脚连接到单片机的地线;3. 将巡线模块的OUT引脚连接到单片机的数字引脚,用于接收巡线模块输出的信号。
接下来是编程控制的流程:1. 初始化巡线模块,设置IO引脚方向;2. 利用IO引脚读取巡线模块输出的信号,一般为高电平或低电平;3. 根据读取到的信号进行判断,例如高电平代表在黑线上,低电平代表在白线上;4. 根据判断结果进行对应的控制,例如向左转、向右转、直行等。
三、巡线模块使用中的注意事项在使用巡线模块时,需要注意以下几点:1. 巡线模块需要与地面上的线保持一定的距离,一般为1-3毫米。
太近或者太远都可能导致检测不准确。
2. 巡线模块的发光二极管和光敏电阻需要对准地面上的线,确保信号的有效检测。
3. 巡线模块的输出信号一般是数字信号,需要通过单片机或者控制器进行读取和处理。
4. 巡线模块适用于光线较为稳定的环境,强光或者弱光可能会影响巡线模块的检测效果,需要进行相应的调试和处理。
综上所述,巡线模块作为实现自动巡线功能的重要组成部分,可以在机器人、智能小车等项目中发挥重要作用。
循迹小车说明文档
循迹小车说明文档姓名:赵晶班级:2011嵌本指令班学号:201101041187一、功能描述1)小车可以沿着黑线跑,转大弯、小弯、直角弯等。
2)车顶附带12864液晶显示屏,显示时间、温度、距障碍物距离等。
3)躲避障碍物。
二、线路连接P0.7--P0.2连接电机驱动器,P1.0--P1.3连接四个探测器,P1.4--P1.7连接12864液晶显示屏,P2.0连接蜂鸣器,P2.1和P2.2连接两个独立键盘P0.0连接温度传感器P3.5--P3.7连接时钟模块。
三、实验器材小车底座一个,直流减速电机两个,L298N电机驱动模块一个,18650充电锂电池2节,电池盒一个,7805稳压芯片一个,10K 电位器4个,RPR光电传感器4 个,100Ω,100K电阻若干,12864LCD显示屏一个,3mm LED小灯若干,1302时钟模块一个,ds18b20温度传感器一个,超声波测速模块一个,LM393比较器四个,103瓷片电容若干,47μf电容若干,洞洞板若干,排线若干,AT89C51芯片一张,单片机最小系统一个。
四、功能实现1、焊一个单片机最小系统,如下图。
保证单片机的正常工作,方便我们对各个引脚的使用。
最小系统板,分三部分:外部晶振电路,给单片机提供工作时钟源;外部复位电路,可以上电复位,还有当单片机在工作过程中,可以人为手动复位;单片机,单片机就是一块微处理器,用来装载程序,实现程序功能。
图1(最小系统电路图)2、组装小车底盘安装小车电机和电机驱动器,设计小车外观。
使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将两引脚接5V,使电机工作在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。
(如果信号端IN1接低电平,IN2接高电平,电机M1反转。
)控制另一台电机是同样的方式。
循迹小车焊接实训心得体会
循迹小车焊接实训心得体会实训时间匆匆而过,作为一名焊接爱好者,我特别享受循迹小车的焊接实训。
在这个过程中,我学到了许多理论知识,同时也得到了相关实践技能的培养和提高。
在这篇文章中,我想归纳总结一下我的实践心得,与大家分享。
首先,在焊接循迹小车的过程中,我学到了许多相关的理论知识,比如焊接技术的基础知识,包括焊接的种类、焊接原理、焊接材料等等。
同时,我还学会了一些安全措施,以及要点和操作规范。
这些知识在实际的焊接操作中起到了重要的指导作用,使我更加熟练地掌握了焊接方法,更加快速和高效地完成了焊接任务。
因此,在实践中,我们需要注重理论知识的学习和掌握,这对于提高实践技能水平有着重要的作用。
其次,焊接实践中,我们需要注重技能的培养和提高。
在实践过程中,我们需要精心准备焊接设备、调整焊接参数,并根据实际需求进行操作。
在焊接过程中,我们需要熟练掌握焊接方法,注意各项技术要点,确保操作的安全和焊接效果的良好。
通过不断练习,我逐渐掌握了更多的焊接技巧和操作方法,实践经验逐渐丰富,焊接质量也得到了很大的提高。
因此,我们需要多加实践,不断地提高自己的技能水平,以更好地完成焊接任务。
最后,在实践中,我们还需要注重团队协作和沟通。
循迹小车的制作过程需要多人协作,每个人负责不同的工作任务,需要密切配合,互相支持,共同完成任务。
我们需要了解其他成员的工作任务和进度,及时沟通交流,确保各项任务的顺利完成。
在实践过程中,我们还需要与导师、同学们开展有效的交流,分享彼此的实践心得和焊接经验。
这样,我们可以得到更好的互相促进和提高。
总之,在循迹小车焊接实训中,我收获了许多,获得了理论知识与实践技能的提高,也积累了团队协作和沟通经验。
实践是检验真理的唯一标准,今后,我将更加致力于实践,不断提高自己的焊接水平,同时,也积极传播焊接知识,与更多人分享我的实践成果与体会。
智能循迹小车报告记录
智能循迹小车报告记录————————————————————————————————作者:————————————————————————————————日期:电子信息专业实验报告课程电子信息系统综合设计实验MCU部分实验题目智能机器小车设计实验总分学生姓名学号学生姓名学号学生姓名学号实验时间地点分组电子信息学院专业实验中心目录一、摘要二、题目要求三、软硬件设计方案四、各部分电路的作用及电路工作原理分析五、系统调试与实验结果六、实验结果七、拓展功能八、参考资料九、附录一、摘要摘要:智能循迹小车主要由单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计我们采用STC89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够识别黑白两色路面,电机模块由L293D芯片和两个减速直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车STC89C52单片机L293D芯片红外光对管二、题目要求“智能寻迹机器小车设计”,要求采用MCS-51单片机为控制芯片,设计出一个能够识别并沿着以白底为道路色,宽度5mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹行进的智能寻迹机器小车。
三、软硬件设计方案1、硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
1.1、单片机模块单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
本次小车的设计我们小组采用的是ATMEL公司的STC89C52RC单片机。
STC89C52RC是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
STC89C52RC单片机介绍:上图为STC89C52RC引脚图。
STC89C52RC引脚功能说明:VCC(40引脚):电源电压VSS(20引脚):接地P0端口(P0.0~P0.7,39~32引脚):P0口是一个漏极开路的8位双向I/O口。
寻迹小车各模块电路原理图
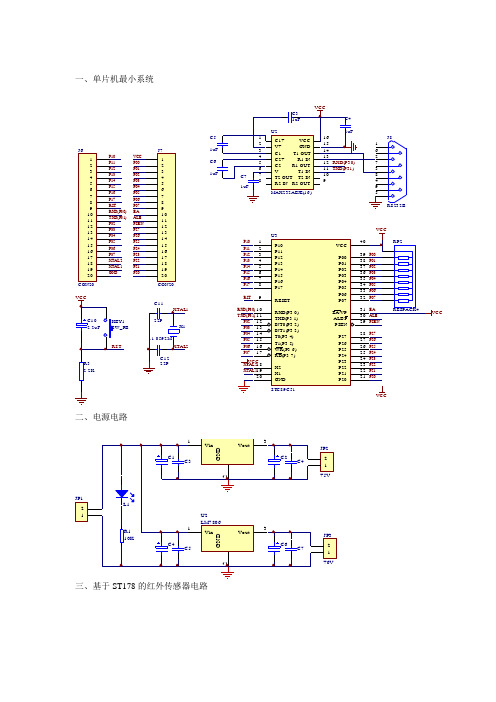
一、单片机最小系统
二、电源电路
U1
三、基于ST178的红外传感器电路
+5
注意事项:
1、请首先查询ST178的器件手册,确定各引脚的功能,然后再对照电路原理图焊接。
2、建议首先设计PCB ,然后根据PCB 焊接实物。
四、基于LM324的比较器电路(输出高电平5v ,低电平)
P 10
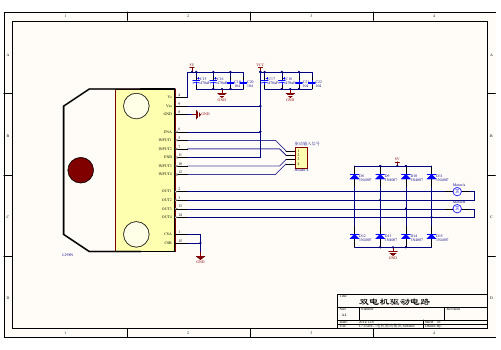
五、电机驱动电路
注意事项:
1、图中的Rs3、Rs4、Rq1、Rq2不要省,否则可能因为单片机带负载能力不强而不能正常工作。
2、在写程序时,不能让Qi 、Hi 同时为低电平,否则会使Q9~Q12短路导通,并很快被烧毁。
同理,不能让Li 、Ri 同时为低电平。
3、建议首先画出PCB ,然后根据PCB 焊接电路。
4、建议同学们先焊接图中的上半部分所示的一路驱动电路,测试成功后再焊接下半部分那一组电机驱动电路。
循迹小车焊接方法
循迹小车焊接方法以循迹小车焊接方法为题,本文将介绍循迹小车的焊接方法。
循迹小车是一种通过感应路面线条,实现自动行驶的智能小车。
它通常由多个电子元件和机械部件组成,而焊接是将这些零部件连接在一起的关键步骤。
1. 确定焊接点:在焊接之前,需要仔细查看循迹小车的设计图纸或说明书,确定焊接点的位置。
这些焊接点通常是电子元件的引脚、电池盒、电机和传感器等部件。
2. 准备焊接材料和设备:焊接材料包括焊锡丝、焊接剂和焊接基板等。
焊接设备包括焊锡炉、焊锡枪、钳子和焊接辅助工具等。
3. 清理焊接点:在焊接之前,需要使用酒精棉球或棉签清洁焊接点,确保焊接点没有灰尘、油污或氧化物等杂质。
这可以提高焊接质量和可靠性。
4. 设置焊接温度和时间:根据焊接材料的要求,设置焊锡炉的温度和焊锡枪的热量。
过高的温度和时间可能会损坏电子元件,而过低的温度和时间可能会导致焊接不可靠。
5. 进行焊接:将焊锡丝插入焊锡枪的喷嘴,加热焊锡丝直到它融化。
然后,用焊锡枪将熔化的焊锡丝涂抹在焊接点上,使其与焊接点完全接触。
在焊接过程中要注意控制焊锡的数量和均匀性,以避免焊锡过多或焊锡不均匀。
6. 检查焊接质量:在完成焊接之后,需要检查焊接点的质量。
可以使用万用表或测试仪器测试焊接点的电阻、电流和电压等参数,以确保焊接点的连接良好。
7. 进行必要的修复和调整:如果发现焊接点有问题,如焊接点松动、焊锡溢出或焊接不良等,需要进行修复和调整。
可以使用焊锡吸取器或焊锡除渣剂等工具,清除焊接点上的焊锡残留物,并重新焊接焊接点。
8. 进行绝缘处理:在焊接完成后,需要进行绝缘处理,以防止焊接点之间的短路或电流泄漏等问题。
可以使用绝缘胶带、热缩管或绝缘漆等材料,覆盖焊接点和电子元件之间的连接部分。
以上就是循迹小车焊接的基本方法。
在进行焊接时,需要注意安全问题,如佩戴防护眼镜和手套,保持通风良好的工作环境,避免产生有害气体和火灾。
此外,焊接过程中要细心、耐心,确保焊接质量和可靠性。
循迹小车电路图
VCC 3 PILM780503
COR1 R1
PIR101
PIR302
A
4
PIR301
1K COU1 U1
PIU101 PIU102 PIU104
COR4 R4
PIU103 PIR402 PIR401
PIU204 PIU201
1K
COU2A U2A
TL084 1 PIU201
3 PIU203 2 PIU202 11
P30 P31
PISTC1010 PISTC1011
PIU206
11
PIR1303
PIR1302 PIR1301
CO±ÜÕÏÐźŠ避障信号
NLVCC01 VCC_1 PI±ÜÕÏÐźÅ01 1 NLGND01 GND_1 PI±ÜÕÏÐźÅ02 2 NLOUT1 OUT1 PI±ÜÕÏÐźÅ03 3 NLOUT2 OUT2 PI±ÜÕÏÐźÅ04 4 NLOUT3 OUT3 PI±ÜÕÏÐźÅ05 5 NLOUT4 OUT4
PIU2012 PIU2013
12 13
红外对管D
GND_1
PIR2402 PIR2401
20K
PID701 PID702
C14 COC14 D7 COD7 LED0
OUT4
RESET
COR21 R21 1K COU6 U6
4
NLRESET
复位模块
COR22 R22
PIR2202 PIR2201
VCC Title Size A4 Date: File: 3
U2C COU2C
PID601 PID602
PIC1 01 PIC1 02
PIY102 COY1 PIY10
智能循迹小车焊接实习报告

1. 实习目的1)熟练掌握焊接技能、电子元器件的识别2)了解智能循迹小车的构成3)培养团队的协作和沟通能力2. 实习要求1)完成基本焊接2)完成基本的焊接质量检测3. 内容安排1)循迹模块2)电源模块3)测试模块4)电机驱动模块4. 元器件的识别4.1 直插电阻色环标示主要应用圆柱型的电阻器上,如:碳膜电阻、金属膜电阻、金属氧化膜电阻、保险丝电阻、绕线电阻。
在早期,一般当电阻的表面不足以用数字表示法时,就会用色环标示法来表示电阻的阻值、公差、规格。
色环主要分成两部分:第一部分:靠近电阻前端的一组是用来表示阻值。
两位有效数的电阻值,用前三个色环来代表其阻值,如:39Ω,39KΩ,39MΩ。
三位有效数的电阻值,用前四个色环来代表其阻值,如:69.8Ω,698Ω,69.8KΩ,一般用于精密电阻的表示。
第二部分:靠近电阻后端的一条色环用来代表公差精度。
对照表见表1:表1 电阻色环阻值对照表例如某4色环电阻色彩标识为:红,红,黑,棕,金,五色环电阻最后一环为误差,前三环数值乘以第四环的数量级,其电阻为220×101=2.2K。
4.2 贴片电阻由三位数组成ABC;计算方法:R=(A×10+B)×10C。
如103代表10K。
4.3 贴片电容、直插瓷片电容电容与电阻的计算方法相似,单位是pF,但贴片的瓷片电容上并没有数字标识,取件时要注意区分。
4.4 电解电容如图1所示,在电解电容的表面标注有容值和耐压值,例如100uF/16V,表示其容值为100uF,耐压值为16V。
图1 电解电容的识别4.5 贴片0805封装LED如图2所示,LED灯有绿线或绿点的一端为负极。
图2 贴片LED的识别4.6 直插DO-41封装二极管如图3示,二极管有白线条的一端为负极。
图3 直插二极管的识别4.7 芯片如图4所示,以MAX232为例,有小圆点的一端为芯片的正方向,引脚顺序为逆时针方向。
图4 芯片引脚序号5. 各模块原理图5.1 红外循迹模块电路采用LTH1550-01型红外对管。
简易循迹小车装配图文资料讲解
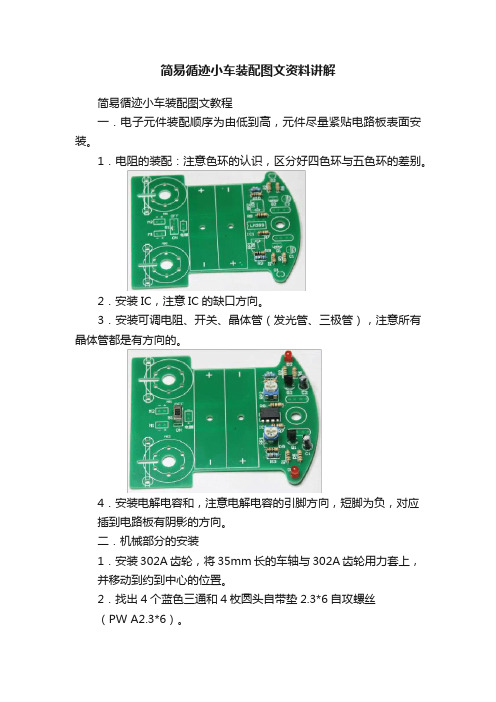
简易循迹小车装配图文资料讲解简易循迹小车装配图文教程一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应插到电路板有阴影的方向。
二.机械部分的安装1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。
光敏电阻小车循迹
分享到...复制网址邮件QQ空间新浪微博腾讯微博微信人人网开心网网易微博搜狐微博QQ好友淘江湖飞信豆瓣一键分享查看更多(124)这是什么工具?JiaThis分享到各大网站KC智能循迹小车寻迹小车附电路图智能小车作者:佚名文章来源:本站原创点击数:176 更新时间:2013-04-12 KC智能循迹小车寻迹小车附电路图含制作方法:随着素质教育的越来越被重视,很多学校都把制作智能小车作为首选课题,智能小车生动有趣还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
本着从简到繁的原则,我们首先来制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
1 智能寻迹小车设计与制作指南20120306

更改设计数据 库建立路径
图 1-6 设计数据库的建立
勾选可显示全部 支持的文件类型
图 1-7 选择文件类型对话框
加 载 PCB 元 件封 装库可 以 在 浏览 器的 组 合框 中 , 选 择库 【 Libraries】。 可 用 鼠标 左键 单 击 【Add/Remove】按钮,将出现如图 1-8 所示的关于引入库文件的对话框。
图 1-4 元器件清单 该项目中,整机中所需的电子元器件见图 1-4 所列。下图 1-5 是主要的元件实物与封装规格。
8
LM393 实物
4
3 1
2 5
6
LM393 元件符号
7
LM393 封装 DIP-8
光敏电阻 CSD5
光敏电阻元件符号
光敏电阻封装
电阻实物
电阻元件符号
电阻封装 AXIAL0.3
三极管 8550
或者直接单击主工具栏上的
按钮,屏幕上出现如图 1-16 所示的对话框。 PCB 设计时一般要添
加通用封装库 C:\Program Files\Design Explorer 99 SE\Library\Pcb\Generic Footprints\Advpcb.ddb\PCB
Footprints.lib。
学习指南
1.1 主要元器件及其封装
整机电原理图如图 1-3 所示,LM393 随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧 压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向 上,整个过程是一个闭环控制,因此能快速灵敏地控制。
图 1-3 智能寻迹小车电原理图
图 1-18 创建 PCB 封装库文件鼠标右键操作
光电传感器自动循迹的智能车系统设计实施方案
第一章绪论1.1智能小车地意义和作用自第一台工业机器人诞生以来,机器人地发展已经遍及机械、电子、冶金、交通、宇航、国防等领域.近年来机器人地智能水平不断提高,并且迅速地改变着人们地生活方式•人们在不断探讨、改造、认识自然地过程中,制造能替代人劳动地机器一直是人类地梦想.b5E2RGbCAP随着科学技术地发展,机器人地感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶地重要部件•视觉地典型应用领域为自主式智能导航系统,对于视觉地各种技术而言图像处理技术已相当发达,而基于图像地理解技术还很落后,机器视觉需要通过大量地运算也只能识别一些结构化环境简单地目标.视觉传感器地核心器件是摄像管或CCD目前地CCD已能做到自动聚焦.但CCD传感器地价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉地系统中考虑使用接近觉传感器是一种实用有效地方法.plEanqFDPw 机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能•避障控制系统是基于自动导引小车(AVG —auto-guide vehicle)系统,基于它地智能小车实现自动识别路线,判断并自动避开障碍,选择正确地行进路线•使用传感器感知路线和障碍并作出判断和相应地执行动作.DXDiTa9E3d该智能小车可以作为机器人地典型代表•它可以分为三大组成部分:传感器检测部分、执行部分、CPU机器人要实现自动避障功能,还可以扩展循迹等功能,感知导引线和障碍物•可以实现小车自动识别路线,选择正确地行进路线,并检测到障碍物自动躲避.基于上述要求,传感检测部分考虑到小车一般不需要感知清晰地图像,只要求粗略感知即可,所以可以舍弃昂贵地CC传感器而考虑使用价廉物美地红外反射式传感器来充当•智能小车地执行部分,是由直流电机来充当地,主要控制小车地行进方向和速度.单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PW功能地单片机,这样可以实现精确调速;第二,可以由软件模拟PW tt出调制,需要占用单片机资源,难以精确调速,但单片机型号地选择余地较大.考虑到实际情况,本文选择第二种方案.CPU 使用STC89C5单片机,配合软件编程实现.RTCrpUDGiT1.2智能小车地现状现智能小车发展很快,从智能玩具到其它各行业都有实质成果.其基本可实现循迹、避障、检测贴片、寻光入库、避崖等基本功能,这几节地电子设计大赛智能小车又在向声控系统发展.比较出名地飞思卡尔智能小车更是走在前列.我此次地设计主要实现循迹避障这两个功能.5PCzVD7HxA第二章方案设计与论证根据要求,确定如下方案:在现有玩具电动车地基础上,加装光电检测器,实现对电动车地速度、位置、运行状况地实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测地各种数据实现对电动车地智能控制•这种方案能实现对电动车地运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统地各项要求.jLBHrnAlLg2.1主控系统根据设计要求,我认为此设计属于多输入量地复杂程序控制问题•据此,拟定了以下两种方案并进行了综合地比较论证,具体如下:XHAQX74J0X采用单片机作为整个系统地核心,用其控制行进中地小车,以实现其既定地性能指标.充分分析我们地系统,其关键在于实现小车地自动控制,而在这一点上,单片机就显现出来它地优势一一控制简单、方便、快捷•这样一来,单片机就可以充分发挥其资源丰富、有较为强大地控制功能及可位寻址操作功能、价格低廉等优点.因此,这种方案是一种较为理想地方案.LDAYtRyKfE针对本设计特点一一多开关量输入地复杂程序控制系统,需要擅长处理多开关量地标准单片机,而不能用精简I/O 口和程序存储器地小体积单片机,D/A、A/D功能也不必选用.根据这些分析,我选定了P89C51R单片机作为本设计地主控装置,51单片机具有功能强大地位操作指令,I/O 口均可按位寻址,程序空间多达8K,对于本设计也绰绰有余,更可贵地是51单片机价格非常低廉.Zzz6ZB2Ltk 在综合考虑了传感器、两部电机地驱动等诸多因素后,我们决定采用一片单片机,充分利用STC89C52单片机地资源.dvzfvkwMI12.2电机驱动模块采用功率三极管作为功率放大器地输出控制直流电机.线性型驱动地电路结构和原理简单,加速能力强,采用由达林顿管组成地H型桥式电路(如图2.1). 用单片机控制达林顿管使之工作在占空比可调地开关状态下,精确调整电动机转速.这种电路由于工作在管子地饱和截止模式下,效率非常高,H型桥式电路保证了简单地实现转速和方向地控制,电子管地开关速度很快,稳定性也极强,是一种广泛采用地PWM调速技术.现市面上有很多此种芯片,我选用了L298N(如图2.2). rqyn14ZNXI这种调速方式有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁地负载冲击,还可以实现频繁地无级快速启动、制动和反转等优点.因此决定采用使用功率三极管作为功率放大器地输出控制直流电机.EmxvxOtOco2.5机械系统本题目要求小车地机械系统稳定、 灵活、简单,而三轮运动系统具备以上特 占八、、・驱动部分:由于玩具汽车地直流电机功率较小,而小车上装有电池、电机、 电子器件等,使得电机负担较重.为使小车能够顺利启动,且运动平稳,在直流 电机和轮车轴之间加装了三级减速齿轮.SixE2yXPq5电池地安装:将电池放置在车体地电机前后位置, 降低车体重心,提高稳定 性,同时可增加驱动轮地抓地力,减小轮子空转所引起地误差 .简单,而三轮运动系统具备以上特点.6ewMyirQFL2.6电源模块方案三:采用8支1.5V 电池双电源分别给单片机与电机供电可解决方案二地问 题且能让小车完成其功能第三章硬件设计3.1总体设计智能小车米用前轮驱动,前轮左右两边各用一个电机驱动,调制前面两个轮--- T---- ----Q13D9D10>80Di 414S8550Dll414S80508550MMOTOR子地转速起停从而达到控制转向地目地,后轮是万象轮,起支撑地作用.将循迹光电对管分别装在车体下地左右.当车身下左边地传感器检测到黑线时,主控芯片控制左轮电机停止,车向左修正,当车身下右边传感器检测到黑线时,主控芯片控制右轮电机停止,车向右修正.kavU42VRUs避障地原理和循线一样,在车身右边装一个光电对管,当其检测到障碍物时,主控芯片给出信号报警并控制车子倒退,转向,从而避开障碍物.y6v3ALoS893.1.1主板设计框图如图3.1,所需原件清单如表3.1.3.2驱动电路(参考文献[4])电机驱动一般采用H桥式驱动电路,L298N内部集成了H桥式驱动电路,从而可以采用L298N电路来驱动电机.通过单片机给予L298N电路PWM信号来控制小车地速度,起停.其引脚图如3.2,驱动原理图如图3.3.M2ub6vSTnPCURRENT SENSING BOUTPUT 4OUTPUT 3INPUT 4ENABLE □INF-UT 3LOGIC SUPPLY VOLTAGE V船GNDIN^UT 2ENABLE AINPUT 1SUPPLY VOLTAGE * OUTPUT?OUTPUT 1NT SENSING A3.3信号检测模块小车循迹原理是小车在画有黑线地白纸“路面”图3.3电机驱动电路上行驶,由于黑线和白纸对光线地反射系数不同,可根据接收到地反射光地强弱来判断“道路”一黑线笔者在该模块中利用了简单、应用也比较普遍地检测方法一一红外探测法.红外探测法,即利用红外线在不同颜色地物理表面具有不同地反射性质地特点.在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上地接收管接收;如果遇到黑线则红外光被吸收,则小车上地接收管接收不到信号,再通过LM324作比较器来采集高低电平,从而实现信号地检测•避障亦是此原理•电路图如图34 OYujCfmUCw市面上有很多红外传感器,在这里我选用TCRT5000型光电对管.3.4主控电路本模块主要是对采集信号进行分析,同时给出PWM波控制电机速度,起停. 以及再检测到障碍报警等作用.其电路图如图5.eUts8ZQVRd第四章软件设计4.1主程序框图:启动图4.1主程序框图4.2电机驱动程序void goahead(){s1=1;s2=0;s3=1;s4=0;}void goback(){s1=0;s2=1;s3=0;s4=1;}void turnleft(){s3=1;s4=0;}void turnright(){s1=1;s2=0; }void stop(){en 1=0;en 2=0;}版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理. 版权为个人所有This article in eludes someparts, in cludi ng text, pictures, and desig n. Copyright is pers onal own ership. sQsAEjkW5T 用户可将本文地内容或服务用于个人学习、研究或欣赏,以及其他非商业性或非盈利性用途,但同时应遵守著作权法及其他相关法律地规定,不得侵犯本网站及相关权利人地合法权利.除此以外,将本文任何内容或服务用于其他用途时,须征得本人及相关权利人地书面许可,并支付报酬.GMslasNXkAUsers may use the contents or services of this articlefor pers onal study, research or appreciati on, and other non-commercial ornon-profit purposes, but at the same time, they shall abide by the provisi ons of copyright law and other releva nt laws, and shall n ot infringe upon the legitimate rights of this website and its releva nt obligees. In additi on, when any content or service of this article is used for other purposes, writte n permissi on and remun erati on shall beobta ined from the pers on concerned and the releva ntObligee. TlrRGchYzg转载或引用本文内容必须是以新闻性或资料性公共免费信息为使用目地地合理、善意引用,不得对本文内容原意进行曲解、修改,并自负版权等法律责任.7EqZcWLZNXReproducti on or quotatio n of the content of this articlemust be reas on able and good-faith citati on for the use of n ewsor in formative public free in formatio n. It shall notmisinterpret or modify the original intention of the contentof this article, and shall bear legal liability such as copyright. lzq7IGfO2E。
循迹小车的组装说明(压缩)
循迹小车车身的组装
(注意连接扣、底板连接放置的位置)
万向轮的组装
(注意连接扣的长度连杆与万向轮支架连接的方向)
小车驱动电机的组装
(注意电机安装的位置)
车轮组件的组装
万向轮的装配
传感器固定装置的组装
(注意连接口、之型连杆连接的方向)
小车行走探测传感器的组装
循迹小车全观图
(电源部分与控制电路板组装未说明详见公司网站说明)
硬件连接示意图
循迹小车程序截图
循迹右电机分别连接在 主板所示的两个端口。 前进探测传感器左右传感器分别接在输入 口0、1口。 打开ZB2软件,打开所给程序资料,下载 到主板运行,若小车不能走黑线调整传感 器、电机的连接口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电自动循迹小车的制作
第一课时线路板的焊接
学科:高中劳技-电子技术教材:《劳动技术》高中二年级教师:
教学
过程
一、电子控制系统的三个部分
实际上,“光电自动循迹小车”是电
子控制技术的一个实际应用。
而电子
控制技术在我们的生产和生活中有
着非常广泛的应用,许多电器设备、
机器等都是人们通过电子控制系统
来进行控制的。
比如:自动烘手机、自动移门、自动洗衣机、银行取款机……
在每一个电子控制系统中,都有三个
构成部分:
输入部分、控制部分、输出部分
其中,输入部分由各种各样的传感器
组成,通过传感器把外界信号转换成
电信号;控制部分将所得到的电信号
进行处理分析,并发出操作指令;输
出部分根据操作指令执行操作。
思考:自动烘手机的三个构成部分1、思考分析:自动烘手机的三
个构成部分:
1、让学生
了解电子
控制系统
的三个构
成部分及
其作用。