P4-最优化设计-3
组合优化

0 0 3 4 4 7
0 0 3 4 5 7
0 0 3 4 5 7
启发式算法
• 在实际应用中,可以通过数值模拟的方法 来衡量算法的性能,从而免去了理论证明 的困难和局限,使我们可以充分地利用经 验和技巧,自由地调整算法的步骤和参 数,设计出性能尽可能好的算法。这样的 算法称为启发式算法(heuristic)
k 0 w • 实例 0 0 C 5, n 4 p1 3, p2 4, p3 5, p4 6 1 0 w1 2, w2 3, w3 4, w4 5 2 0 • 最优值为 7,最优 3 0 解为物品1,2 放入 4 0 背包 5 0
1 2 3 4
0 0 3 3 3 3
• 由初始条件和递推关系可逐步求得 I (n, C), 外层循环为 k 0,, n ,内层循环为 w 0,, C • 该动态规划时间复杂性为 Ο(nC) ,背包问题 的实例规模为 Ο(n log2 B), B max{ p j , wj , C} , 因此它是一个伪多项式算法
背包问题的动态规划
中国邮递员问题
• 一位邮递员从邮局选好邮件去投 递,然后返回邮局。他必须经过 由他负责投递的每条街道至少一 次。如何为这位邮递员设计一条 投递线路,使其耗时最少。
中国邮递员问题
• Euler环游(一笔画)
• 经过图中所有边恰好一 次的回路称为Euler 回路 ,含有Euler回路的图称 为Euler 图 • 图是Euler 图的充要条件 是图中没有奇度顶点
P NP 假设下
• NP 类中的问题既不是没有多项式时间算法的问题 ,也不是最难的问题。
P NP 假设下
P 与NP-hard
• P问题
• 图的最短路 • 图的最大流、最小割 • 背包问题 • 划分问题 • 图的独立集、团、顶 点覆盖 P 问题 线性规划 (二维)匹配 指派 Euler圈 中国邮递员 最小生成树 NP-hard问题 整数规划 三维匹配 二次指派 Hamiltion圈 TSP 最小Steiner树
配送线路优化的方法 节约里程法
配送线路优化的方法节约里程法配送线路优化的方法-节约里程法配送线路优化的方法节约里程法学习目标技能目标:具备根据实际情况选择合理的线路优化方法进行线路优化的能力线路优化设计1、线路优化设计的意义配送线路设计就是整合影响配送运输的各种因素,适时适当地利用现有的运输工具和道路状况,及时、安全、方便、经济地将客户所需的商品准确地送达客户手中。
在配送运输线路设计中,需根据不同客户群的特点和要求,选择不同的线路设计方法,最终达到节省时间、运距和降低配送运输成本的目的配送线路优化方法一、直送式配送运输适用方法―最短路径法(标点设计最短线路)适用条件:1、由配送中心向每一位客户开展专门送货。
2、该客户的送货量一般必须满足车辆的满载。
配送效果:1、配送车辆满载运输2、配送运输路线距离最短。
配送线路优化方法二、分送式配送---节约里程法适用方法―节约里程法适用条件:1、由配送中心向多位客户开展拼装送货。
2、每位客户的送货量都不能满足车辆的满载。
配送效果:1、配送车辆满载运输2、配送运输路线距离最短。
节约里程法的意义送货时,由一辆车装载所有客户的货物,沿着设计的最佳路线依次将货物送到各位客户手中,这样既能保证按时按量将用户需要的货物及时送达,又节约车辆,节约了费用,缓解了交通紧张的压力,并减少了运输对环境造成的污染。
1、满足客户的配送需要2、减少配送车辆的使用,节约运营费,减少固定资所产的资金投入3、社会意义节约里程法1、基本原理2、案例分析3、优缺点分析4、改良建议基本原理基本原理就是几何学中三角形的一边之短必定大于另外两边之和节约里程法核心思想就是依次将运输问题中的两个电路分拆为一个电路,每次并使分拆后的总运输距离增加的幅度最小,直至达至一辆车的载满管制时,再展开下一辆车的优化,优化过程分成循序方式和以太网方式两种。
节约里程法假如一家配送中心(dc)向两个用户a、b 运货,配送中心至两用户的最短距离分别就是a和b,a和b间的最短距离为c,a、b的货物的需求量分别就是qa和qb,且qa+qb大于运输装载量q,如图所示,如果配送中心分别取货。
2022年职业考证-软考-系统分析师考试全真模拟易错、难点剖析AB卷(带答案)试题号:73

2022年职业考证-软考-系统分析师考试全真模拟易错、难点剖析AB卷(带答案)一.综合题(共15题)1.单选题由于处理器芯片在不同领域应用时,需要考虑对环境的适应性。
通常,我们把芯片分为民用级、工业级和军用级。
()分别是民用级、工业级和军用级芯片的标准工作温度范围。
问题1选项A.-10℃ ~+70℃ 、-40℃~+80℃ 、-50℃+150℃B.0℃~+70℃、-30℃~+85℃、-60℃~+150℃C.0℃~+70℃、-40℃~+85℃、-55℃~+150℃D.-10℃~+60℃、-40℃~+90℃、 -55℃~+150℃【答案】C2.单选题RISC-V是基于精简指令集计算原理建立的开放指令集架构,以下关于RISC-V的说法中,不正确的是()。
问题1选项A.RISC-V 架构不仅短小精悍,而且其不同的部分还能以模块化的方式组织在一起,从而试图通过一套统一的架构满足各种不同的应用场景B.RISC-V基础指令集中只有40多条指令,加上其他模块化护展指令总共也就几十条指令C.RISC-VISA可以免费使用,允许任何人设计、制造和销售RISC-V芯片和软件D.RISC-V 也是X86架构的一种,它和ARM架构之间存在很大区别【答案】D【解析】本题考查的是RISC相关概念。
RISC-V的特点:1.完全开源对指令集使用,RISC-V基金会不收取高额的授权费。
开源采用宽松的BSD协议,企业完全自由免费使用,同时也容许企业添加自有指令集拓展而不必开放共享以实现差异化发展。
C选项说法正确。
2.架构简单RISC-V架构秉承简单的设计哲学。
体现为:在处理器领域,主流的架构为x86与ARM架构。
x86与ARM架构的发展的过程也伴随了现代处理器架构技术的不断发展成熟,但作为商用的架构,为了能够保持架构的向后兼容性,其不得不保留许多过时的定义,导致其指令数目多,指令冗余严重,文档数量庞大,所以要在这些架构上开发新的操作系统或者直接开发应用门槛很高。
轴承型号--字母含义

轴承型号字母含义1)内部结构A——内部设计与标准不同的轴承。
A——角接触球轴承,接触角为30度。
A5——角接触球轴承,接触角为25度。
B——角接触球轴承,接触角为40度。
C——角接触球轴承,接触角为15度。
C——圆锥滚子轴承,接触角为20度。
D——圆锥滚子轴承,接触角为28度。
C,CA(带黄铜实体保持架),CD(带冲压保持架)——高负载调心滚子轴承。
E——高负载圆柱滚子轴承。
H——高负载推力调心滚子轴承。
J——圆锥滚子轴承的外圈滚道的小端径,角度,外圈宽度与ISO规定一致。
(2)材料g——套圈,滚动体为渗碳钢。
H——套圈,滚动体为不锈钢。
(3)保持架M——铜合金实体保持架。
T——合成树脂保持架。
W——冲压保持架。
V——无保持架。
(4)密封圈,防尘盖Z,ZS——一面带钢板防尘盖。
ZZ,ZZS——两面带钢板防尘盖。
D,DU——一面带接触式橡胶密封圈。
DD,DDU——两面带接触式橡胶密封圈。
V——一面带非接触式橡胶密封圈。
VV——两面带非接触式橡胶密封圈。
(5)套圈形状K——圆锥孔,锥度1:12。
K30——圆锥孔,锥度1:30。
E——套圈上有切口或油孔。
E4——外圈上带油槽,油孔。
N——外圈外径带止动槽。
NR——外圈外径带止动槽,止动环。
(6)配合及衬垫DB——背靠背成对安装。
DF——面对面成对安装。
DT——串联成对安装。
+K——外圈带衬垫。
+L——内圈带衬垫。
+KL——内,外圈带衬垫。
(7)游隙C1——向心轴承径向游隙,比C2游隙小。
C2——向心轴承径向游隙,比标准游隙小。
CN(省略)——向心轴承径向标准游隙。
C3——向心轴承径向游隙,比标准游隙大。
C4——向心轴承径向游隙,比C3游隙大。
C5——向心轴承径向游隙,比C4游隙大。
CC1——圆柱滚子轴承(不可互换)径向游隙,比CC2游隙小。
CC2——圆柱滚子轴承(不可互换)径向游隙,比标准游隙小。
CC——圆柱滚子轴承(不可互换)径向标准游隙。
CC3——圆柱滚子轴承(不可互换)径向游隙,比标准游隙大。
2018年下半年软件设计师真题+答案解析(全国计算机软考)上午选择+下午案例完整版
2018年下半年软件设计师真题+答案解析上午选择2018年11月11日考试1、CPU在执行指令的过程中,会自动修改()的内容,以使其保存的总是将要执行的下一条指令的地址。
A. 指令寄存器B. 程序计数器C. 地址寄存器D. 指令译码器答案:BCPU执行指令的过程中,会自动修改PC的内容,PC是指令计数器,用来存放将要执行的下一条指令。
对于指令寄存器(IR)存放即将执行的指令,指令译码器(ID)对指令中的操作码字段进行分析和解释,地址寄存器(AR),不是我们常用的CPU内部部件,其作用是是用来保存当前CPU所要访问的内存单元或I/O设备的地址。
2、在微机系统中,BIOS(基本输入输出系统)保存在()中。
A. 主板上的ROMB. CPU的寄存器C. 主板上的RAMD. 虚拟存储器答案:ABIOS(Basic Input Output System)(基本输入输出系统)是一组固化到计算机内主板上一个ROM芯片上的程序,它保存着计算机最重要的基本输入输出的程序、开机后自检程序和系统自启动程序,它可从CMOS中读写系统设置的具体信息。
3、采用n位补码(包含一个符号位)表示数据,可以直接表示数值()。
A. 2nB. -2nC. 2n-1D. -2n-1答案:D在计算机中,n位补码(表示数据位),表示范围是-2n-1 ~ -2n-1-1,其中最小值为认为定义,以n=8为例,其中-128的补码是人为定义的1000 0000。
4、某系统由下图所示的部件构成,每个部件的千小时可靠度都为R,该系统的千小时可靠度为()。
A. (3R+2R)/2B. R/3+R/2C. (1-(1-R)3)(1-(1-R)2)D. (1-(1-R)3-(1-R)2)答案:C对于可靠度计算,串联系统可靠度为R1*R2,并联系统R1=1-(1-R)*(1-R)*(1-R),并联系统R2=1-(1-R)*(1-R),因此答案为(1-(1-R)3)(1-(1-R)2)。
网络优化-路测和分析
1、标有站点位置和路测路线的簇地图 2、覆盖整个簇优化路线的用颜色标明的信号电平和质量 3、掉话率、接入失败、呼叫完成和切换失败等数据 4、所有接收到的数据 说明:本阶段簇中所有基站必须通过单站优化之后
系统优化
目的: 使系统作为一个整体来提供可能的最
好的覆盖和运行质量 设计院提交:
1、包含所有基站位置、路测路线和问题地区的地图 2、绘制覆盖整个路线的以颜色标明的信号电平和质量图 3、呼叫完成,接入失败等的统计 4、簇优化之后做出的修改的文件 5、所有接收到的数据
2、制定路测路线:
路线由设计院和中国联通共同制定,标准如下
选择路线标准
1、检测覆盖问题为目的地测试路线
a 路线要包括话务量大的地区 b 路线要区分好每一个基站和扇区的区域 c 路线可能包括服务区域外的地区
2、以运行评估和验收测试为目的地测试路线
a 路线应仅包括服务区域 b 路线应包括占整个服务区的30%的切换区
分析工具
Opas32专对: 安捷伦E74XX:路测时用record Pcubed专对: CAIT数据结果(二进制格式) Actix Analyzer支持: E74XX路测时用log to file CAIT
接入失败分析
一次接入是由移动台向基站发送接入尝试消 息发起的。
在CDMA系统中,呼叫发起由两种情况组成: (1)移动用户发起; (2)由固定网呼叫转移到移动用户。 接入失败有多种原因。
具体进程
以上三个过程,都将经过下面五个步骤:
P1-计划:簇的划分,工作人员和设备规划 P2-规划运行目标:建立基本的运行目标,如接通率,掉话率等 P3-进行路测、数据分析和提出改进建议:进行实际的路测,分析 路测数据,提出可行的建议来改善运行质量,提高覆盖,减少干扰 P4-改进建议的实施和再路测:实施建议的改进方案并进行路测来 测量实施后的运行情况 P5-进一步的建议和实施:提供额外的建议和实施,及实施后的确 认
CAMCAD考试题

机械CAD/CAM习题第一章CAD/CAM技术概述选择题1.下述CAD/CAM过程的操作中,属于CAD范畴的为( A )。
CAD范畴几何造型工程分析仿真模拟图形处理A.模拟仿真B.CAPPC.数控加工D.GT2.下述CAD/CAM过程的操作中,属于CAD的范畴的是( D )。
A.CAPP B.CIMSC.FMS D.几何造型3.以下不属于CAD/CAM系统的基本功能的是( D )。
人机交互图形显示存储输入输出A.图形显示功能B. 输入输出功能C. 交互功能D. 网络功能4. 以下不属于输出设备的是( A )A. 操纵杆B. 打印机输入设备:操纵杆光笔数字化仪鼠标键盘C. 绘图机D. 显示器输出设备:绘图仪图形终端打印机硬盘机磁带机5. 以下软件中,( C )是操作系统。
A. Word2000B. Autocad 几何建模工具SOLIDworks/dge pro/e ug-iiC. Windows95D. Pro-E 操纵系统Windows98 Windows2000 WindowsNTPCDOS6. 计算机辅助制造进行的内容有( C )(工程绘图几何建模计算分析优化设计有限元分析计算机辅助工艺设计数控编程动态仿真计算机辅助测试技术工程数据管理)A. 进行过程控制及数控加工B. CADC. 工程分析D. 机床调整7.应用软件是在操作系统、( C )基础上针对某一专门的应用领域而研制的软件.A. CAD 软件B. CAM软件C. 支撑软件D. 编译系统8.( D )是CAD/CAM系统的核心。
A. 系统软件B. 支撑软件C. 应用软件D. 数据库9.机械CAD/CAM系统中,CAE是指(C)。
A.计算机辅助设计B.计算机辅助制造C.计算机辅助工程分析D.计算机辅助工艺过程设计10.把CAD和CAM的信息连接起来,实现CAD/CAM一体化的关键性中间环节是( C )A. CADB. CAMC. CAPPD. CAE填空题:1.CAD/CAM系统是由: 人、硬件和软件组成。
英飞凌第四代IGBT模块特性
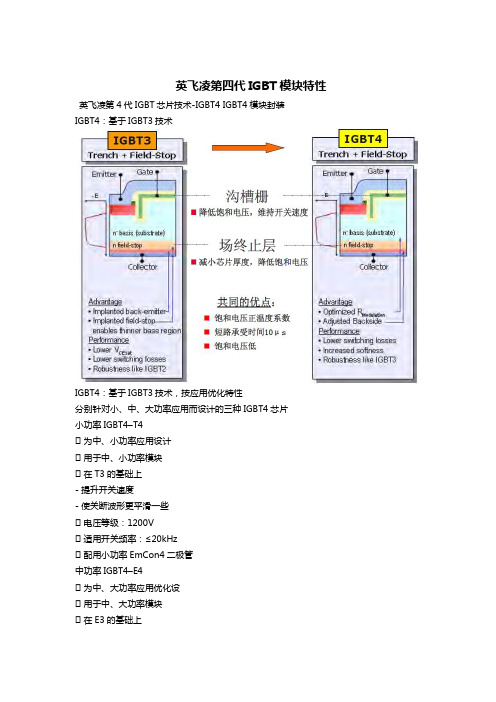
英飞凌第四代IGBT模块特性英飞凌第4代IGBT芯片技术-IGBT4 IGBT4模块封装IGBT4:基于IGBT3技术IGBT4:基于IGBT3技术,按应用优化特性分别针对小、中、大功率应用而设计的三种IGBT4芯片小功率IGBT4–T4为中、小功率应用设计用于中、小功率模块在T3的基础上- 提升开关速度- 使关断波形更平滑一些电压等级:1200V适用开关频率:≤20kHz配用小功率EmCon4二极管中功率IGBT4–E4为中、大功率应用优化设用于中、大功率模块在E3的基础上- 提升开关速度- 使关断波形更平滑一些电压等级:1200V,1700V适用开关频率:≤8kHz配用中功率EmCon4二极管大功率IGBT4–P4为大功率应用优化设计用于大功率模块在E3的基础上- 使关断过程“软”- 降低关断速度电压等级:1200V,1700V适用开关频率:≤3kHz配用大功率EmCon4二极管IGBT4(1200V):特征参数的调整:饱和电压T4-小功率IGBT4:开关能耗低于T3 (提高了开关速度)E4-中功率IGBT4:开关能耗低于E3 (提高了开关速度)P4-大功率IGBT4:开关能耗高于E3 (降低了关断速度,使关断“柔软”)关断过程对比:T4的波形比T3的平滑一些测试条件:Ls=200nH(极大),Ic=150A(Ic,nom=300A),Vdc=400V/450V/500V,Tj=25°CIGBT4(1200V):中功率E4关断过程对比:E4的波形比E3平滑一些测试条件:Ic=Ic,nom=450A,Vdc=800V/900V(仅供测试),Tj=25°CIGBT4(1200V):大功率P4关断过程对比:P4(及EmCon4)呈现明显的“软”特性IGBT4(1700V):大功率P4关断过程:对比IGBT3(E3),P4呈现明显的“软”特性关断过程:对比IGBT2(KF6C),P4呈现较“软”特性,且关断能耗较小IGBT4模块:Tvjop,max = 150°C!概念:在开关工作条件下,IGBT4模块的最高允许结温规格为 150°C,比IGBT3/IGBT2模块(1200V和1700V)的规格提高了25°C!出发点:适应芯片小型化(Rthjc,ΔTjc[=PLoss×Rthjc])实现:IGBT4模块内部焊线工艺的改进可靠性因素:焊线工艺决定了模块的可靠性指标之一-功率循环(PC)次数。
YZY800D压桩机起重转台计算及优化
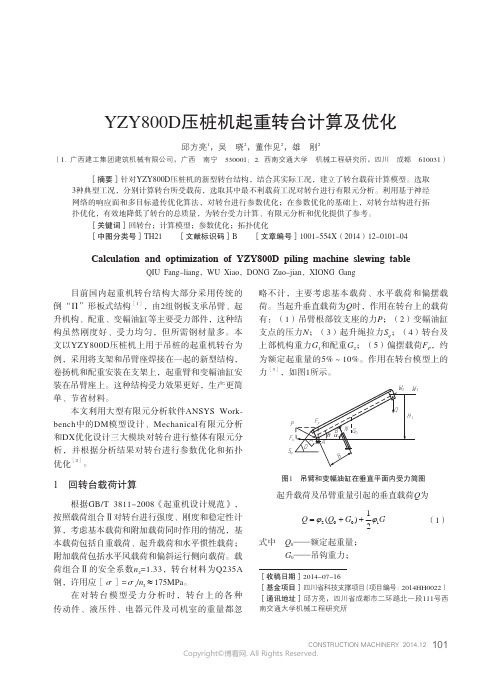
略不计,主要考虑基本载荷、水平载荷和偏摆载 荷。当起升垂直载荷为Q时,作用在转台上的载荷 有:(1)吊臂根部铰支座的力P;(2)变幅油缸 支点的压力N;(3)起升绳拉力Sq;(4)转台及 上部机构重力G1和配重G2;(5)偏摆载荷FP,约 为额定起重量的5%~10%。作用在转台模型上的 力[3],如图1所示。
分Sqr析º»¼ [通5]过,表求1出可转知台,受转到台的在载工荷况如三表下1受所力示状。况最恶 劣,此时起重机处于最小幅度、最大载荷的情况, 因此选择工况三对转台进行有限元分析和优化。
N
1 H
ª«¬(Q
1 2
G0 )L cos u
(W1
W2 )H1
º Sqr »¼
(3)
2 转台模型有限元分析
表1 3种典型工况计算结果
台参数化仿真模型。在划分网格时,主要受力部 分网格划分得较密,如变幅油缸轴套、吊臂轴套 和卷扬机轴套等;对受力较小部分如底板、前封 板、加强肋等网格划分得较疏,共计单元214789 个,节点394965个。底板与回转支承之间用1圈螺 栓连接,故将转台视为无位移的约束处理[6]。在 Mechanical模块中对转台模型进行有限元分析,应 力云图和变形分别见图2和图3。
W2 W 1
P
Fy
G0 A
B
Q H1
图1 吊臂和变幅油缸在垂直平面内受力简图
起升载荷及吊臂重量引起的垂直载荷Q为
Q
M2
(Q0
G0 )
1 2
M1G
(1)
式中 QG00———S—q 额吊M定钩2 起(重Qm重0力K量;G;0 )
薪酬管理体系4P模式
薪酬管理体系4P模式P1:以战略定位—-Price【根据企业战略,制定薪酬价位】P2:以岗位定级—-Position【根据岗位要求,制定级别】P3:以能力定薪--Person【根据个人能力,确定薪酬】P4:以绩效定奖—-Performance【根据个人绩效,发放奖金】一、经营环境巨变背景下人力资源管理与薪酬管理1、薪酬设计中的难与易2、“4P”薪酬设计的理念和模式二、“4P”薪酬管理体系设计之P1:——为职位(Position)付薪3、职位分析与梳理4、如何通过职位评估(重点介绍点因素评估系统)正确反映职位的价值5、德翰职位评估软件演示三、“4P”薪酬管理体系设计之P2:—-为市场(Price)付薪6、09年主要行业薪酬状况及热点演示7、如何进行薪酬调查并正确使用获得数据8、如何设计有竞争力薪酬方案9、如何通过对不同职类职位薪酬的合理定位优化薪酬总额方案10、薪酬结构的选择与结构参数的确定11、宽带结构12、薪酬定位与结构设计实战案例展示13、如何将员工能力与薪酬挂钩14、如何设计薪酬以吸引和激励知识型员工五、“4P”薪酬管理体系设计之P4:—-为绩效(Performance)付薪15、基于绩效的奖励模式的选择16、如何通过薪酬加强销售力六、管理人员的薪酬激励17、管理人员的薪酬战略18、管理人员的短期和长期激励计划19、聘用协议与绩效评估七、福利与非现金奖励八、企业文化与薪酬管理20、整合薪酬、行为、文化和战略21、如何将绩效与年度调薪挂钩薪酬运作模式薪酬的运作模式有高弹模式、高稳定模式和折中模式。
在企业的成长期要采用高弹薪酬运作模式,降低刚性薪酬的比例而增加弹性薪酬。
高比例的奖金与津贴会极大地刺激员工的工作积极性,挖掘他们的潜能,这也非常符合企业在此阶段迅速提高生产力,迅速发展的需要。
在企业成熟阶段要采用高稳定薪酬运作模式,此时企业要维持现有的经营水平。
在本阶段加大投入促进生产效率提高的潜力是很低的,企业更加希望稳定现有的人力资源,利用其高比例的产品市场份额获得高利润。
最优化之基本概念

最优化之基本概念第一章1.最优化问题的数学模型包含有三个要素:即变量(又称设计变量)、目标函数、约束条件。
(变量、目标函数、约束条件 (4)2.(最优化问题的三种表达形式……P5中)3.称为集约束,通常不作考虑,可认为目标函数的定义域。
一般有。
可行点(容许点):满足所有约束的点称为可行点或容许点。
可行域(容许集):全体可行点构成的集合称为可行域,也叫容许集,记为D。
(P5)4.最优点:在可行域内找到的点,使得目标函数值取得最优值。
最优值:目标函数值最优解:,但习惯上把本身称为最优解。
(P5底)5.处理最优化问题的3种方法:解析法、图解法、迭代法6.迭代算法:选取一个初始可行点,然后根据现有的信息确定本次迭代的一个搜索方向和适当的步长,从而得到一个新点。
搜索方向迭代步长下降算法:求有上升算法:求有(P9)7.收敛速度:衡量算好好坏的一个标准。
(P9底)具有超线性收敛或者二阶收敛的算法是较快速的算法。
(P10)8.计算终止的计算终止准则:无约束优化问题的三种计算终止准则:点距准则、函数下降量准则、梯度准则。
(P11)约束优化问题有各自的终止准则。
优化算法的基本迭代过程:(P11底)9.图解法:(P6)运用求解二位优化问题可行域:即约束集合(P6)等高线:在三维空间中,不同的c值得到不同的投影曲线。
没一条投影曲线对应一个c 值,称投影曲线为目标函数的等值线或者等高线。
(P7)10.组合优化问题举例:背包问题即0-1问题:P13 例1.9 需要设为二进制变量,表示装第i个物品。
旅行商问题(TSP):(P14)组合爆炸P15聚类问题:(P14)组合爆炸P1511.算法复杂性:算法对时间的复杂性T(n)和对空间的复杂性S(n)。
算法的时间复杂性:算法执行基本操作的次数算法的空间复杂性:算法执行期间占用的存储单位(P15)12.组合优化问题分类:根据算法的复杂性,可分为P类、 NP类、NP完全类。
P类问题:具有多项式实践求解算法NP类问题:未找到球最优解的多项式实践算法NP完全类问题:任何一个问题至今未发现有多项式算法;只要其中一个问题找到了多项式算法,那么其他所有问题均有多项式算法。
第1章 最优化方法的一般概念
第1章最优化方法的一般概念最优化问题就是依据各种不同的研究对象以及人们预期要达到的目的,寻找一个最优控制规律或设计出一个最优控制方案或最优1控制系统。
针对最优化问题,如何选取满足要求的方案和具体措施,使所得结果最佳的方法称为最优化方法。
1.1 目标函数、约束条件和求解方法根据所提出的最优化问题,建立最优化问题的数学模型,确定变量,给出约束条件和目标函数最优化方法解决实际工程问题的步骤:2(或性能指标);对所建立的模型进行具体分析和研究,选择合适的最优化求解方法;根据最优化方法的算法,列出程序框图并编写程序,用计算机求出最优解,并对算法的收敛性、通用性、简便性、计算效率及误差等做出评价。
目标函数、约束条件和求解方法是最优化问题的三个基本要素。
1.目标函数:就是用数学方法描述处理问题所能够达到结果的函数。
该函数的自变量是表示可供选择的方案及具体措施的一些参数或函数,最佳结果就表现为目标函数取极值。
32.约束条件:在处理实际问题时,通常会受到经济效率、物理条件、政策界限等许多方面的限制,这些限制的数学描述称为最优化问题的约束条件。
3.求解方法:是获得最佳结果的必要手段。
该方法使目标函数取得极值,所得结果称为最优解。
4解:①目标函数:122max (cos )sin S x x x ②约束条件:a x x 21212(0,0)x x (非线性)(线性)说明:5这是一个非线性带等式约束的静态最优化问题。
这类问题有时可以方便地将等式约束条件带入到目标函数中,从而将有约束条件的最优化问题转换为无约束条件的最优化问题,以便求解。
例如:将例1-1转换为无约束条件的最优化问题,目标函数变为:sin )cos 2(max 222x x x a S例1-2(P2)(※)仓库里存有20m 长的钢管,现场施工需要100根6m 长和80根8m 长的钢管,问最少需要领取多少根20m 长的钢管?解:用一根20m 长的钢管,截出8m 管和6m 管的方6法只有三种:设x 1为一根20m 管截成两根8m 管的根数;x 2为一根20m 管截成一根8m 管和两根6m 管的根数;x 3为一根20m 管截成三根6m 管的根数。
ANSYS WORKBENCH优化设计详细教程
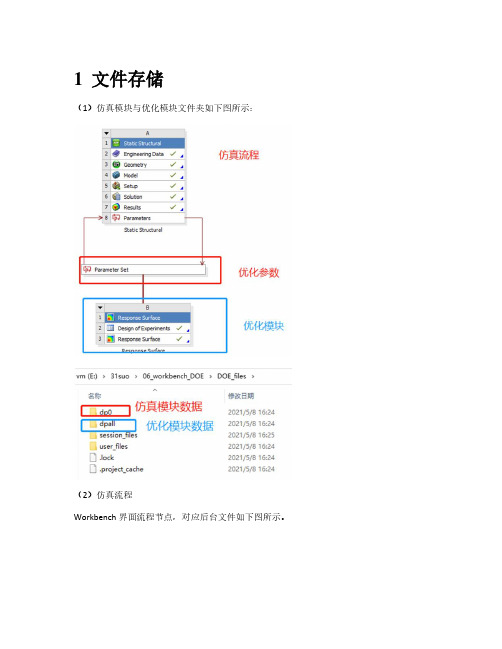
1文件存储(1)仿真模块与优化模块文件夹如下图所示:(2)仿真流程Workbench界面流程节点,对应后台文件如下图所示。
1.材料文件;2.几何文件;3.设置及网格、结果文件2优化参数设置左侧为输入输出参数界面,右侧为工况列表。
目标:提取结果最小值3ANSYS WORKBENCH优化设计3.1目标驱动优化(Driven optimization)和多学科项目类似。
算例:Direct_optimization.wbpj3.1.1确定输入输出参数输入输出参数如下图所示:3.1.2设置优化目标设置一个或者多个优化目标,如将质量最小化作为目标,并设置质量范围,如下图所示。
3.1.3输入参数范围设置两个输入参数范围如下图所示:3.1.4优化方法(1)是否保留工况点求解数据(2)目标驱动的优化方法•Screening•MOGA•NLPQL•MISQP•Adaptive Single-Objective•Adaptive Multiple-Objective(3)设置工况数量,最小6个(4)设置残差结果残差设置:1e-6(5)设置候选工况数残差达不到要求,增加候选节点继续优化计算。
3.1.5求解开始求解显示当前求解工况仿真各个节点状态显示计算候选工况3.1.6优化完毕3.1.6.1 输入参数变化曲线显示两个输入参数变化曲线3.1.6.2 工况数据列表3.1.6.3收敛判断描述优化目标,优化算法,是否收敛,最优工况等,类似于设置总结3.1.6.4 结果设置参考点,计算工况残差,优化目标结果满足1e-6标准,即可认为收敛。
工况DP7为参考点,DP11残差为0,则最优点为DP7。
工况结果分布散点图3.1.6.5 输入输出分布算例:parameter_correlation.wbpj3.2.1参数设置(1)是否保留工况点数据DX计算完成后是否保留相关数据(2)失败工况管理(failed design points management)尝试计算次数(Number of retries):失败后重新尝试计算的次数计算延迟时间(Retry delay):两次重新计算之间要经过多少时间。
p4编程语言实例

p4编程语言实例引言:P4(Programming Protocol-Independent Packet Processors)是一种高级编程语言,用于定义网络数据包处理器。
与传统的网络数据包处理方式相比,P4允许网络管理员根据网络需求灵活设计和定义自定义协议,使得网络设备可以更好地适应不同应用场景和需求。
1. P4编程语言概述P4编程语言是一种面向数据包处理的领域特定语言(DSL),它允许网络管理员定义网络设备上的数据包处理逻辑。
通过使用P4语言,管理员可以编写灵活的处理代码,以指示网络设备如何处理收到的数据包,包括解析报文头部、执行匹配操作、执行特定的操作和生成新的报文等。
2. P4语言的重要特性2.1 协议无关性:P4语言与实际的底层硬件和协议无关,它可以用于定义任何类型的协议和数据包处理逻辑。
2.2 灵活性:P4语言允许管理员根据不同的网络需求设计和定制自己的协议和数据包处理器,使得网络设备可以适应不同的网络环境和应用场景。
2.3 可编程性:P4语言可以根据需要进行编程和修改,使得网络管理员可以灵活地对网络设备进行升级和更新,以应对新的网络安全风险和需求变化。
2.4 性能优化:P4语言允许管理员设计高效的数据包处理逻辑,以提高网络设备的吞吐量和性能。
3. P4语言的应用领域3.1 数据中心网络:P4语言在数据中心网络中广泛应用,可以用于定义灵活的数据包路由和负载均衡策略,优化网络性能和资源利用率。
3.2 5G网络:P4语言可以用于定义5G网络中的数据包处理逻辑,支持网络切片和差异化服务,提升5G网络的性能和用户体验。
3.3 物联网:P4语言可以用于定义物联网设备上的数据包处理逻辑,支持智能家居、智能交通等应用的网络通信和数据处理过程。
3.4 SDN(软件定义网络):P4语言被广泛应用于SDN网络中,可以定义数据包转发规则、QoS(服务质量)策略等,实现网络管理的灵活性和可编程性。
4. P4编程语言实例案例4.1 数据包解析和匹配:使用P4语言可以定义如何解析数据包的报文头部,并对报文内容进行匹配操作,以确定进一步的处理方式。
优化设计运输路线-作业题6个
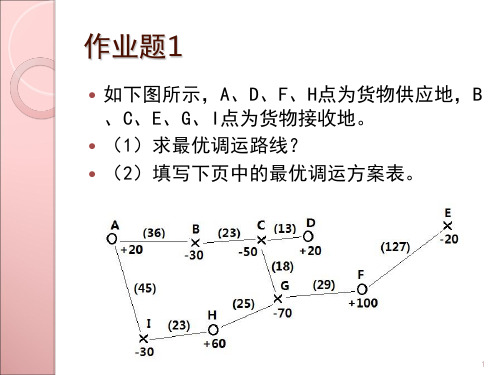
如下图所示,A、D、F、H点为货物供应地,B 、C、E、G、I点为货物接收地。
(1)求最优调运路线? (2)填写下页中的最优调运方案表。
1
收点 发点
B
A
20
D
F
H
收量/t
30
20
C
E
G
20
20
80
30
50
20
70
10
20
I
发量/t
20
20
100
30
60
30
200
40
20
80 30
30
13(0)
10(7)
P5
1.6
14
22(0)
18(0)
22(0)
19(7)
9(10)
P6
1.8
19
27(0)
23(0)
27(0)
30(1)
20(4)
11(22)
P7
13
(3)节约里程数排序
序号 1 2 3 4 5 6
路线
P6P7 P3P4 P5P6 P2P3 P1P3 P4P6
节约里程 22 13 10 8 7 7
较优化后的方案比单独向各客户分送可节约多少 时间?
3
解题步骤
1. 最短距离矩阵表 2. 里程节约表 3. 里程节约量排序 4. 调运方案陈述 5. 计算可节约多少
时间?
4
里程表
需要量
P0
1.5
8
P1
1.7
8
12
P2
0.9
6
13
4
P3
1.4
7
15
9
指令格式的优化设计
指令格式的优化设计指令格式的优化设计的目的是用最短的二进制位数表示指令的操作信息和位置信息,使指令的平均字长最短。
指令格式的优化设计,首先根据指令集各指令的使用频度的分布{P}对操作码进行优化设计,然后对位置i码和寻址方式的表示采取优化措施,使指令格式达到优化。
经过优化设计的指令集减少了程序的总位数,减少了程序运行的时空开销,从而提高了系统的性能。
我们首先讨论操作码的优化编码方法,然后讨论寻址技术,最后,在操作码和位置码优化表示的基础上,说明指令格式的优化设计。
一、操作码的优化设计1、操作码优化编码的方法操作码优化编码的方法有三种:定长编码、哈夫曼编码和扩展编码。
定长编码:是指所有指令的操作码长度都是相等的。
如果有n个需要编码的操作码,定长操作码的位数最少需要logn位。
2哈夫曼编码:用哈夫曼方法构造哈夫曼树进行编码。
构造哈夫曼树的方法是:每次从指令集中选出两个使用频度最小的指令,将其频度相加,形成一个节点,称为父节点,将新生成的父节点放到结点集中,从新的节点集中再选两个使用频度最少的节点生成一个新的父节点,直至节点集成为空集,就生成了一棵哈夫曼树。
每个节点的两个分支节点,称为节点,用0和1标识,上面的节点称根节点,下面的节点称为叶节点。
从最上面的根节点到一个叶节点的路径(由0和1组成的序列)就是这个叶节点的哈夫曼编码。
由于哈夫曼编码的码长种类较多。
既不利于硬件对操作码的译码,也很难与位置码配合形成长度规整的指令格式。
因此,实用的操作码编码一般不采用哈夫曼编码而采用扩展编码的方法。
扩展编码:限定使用少数几种长度码长,使用频度高的码点用短码表2 / 22示,使用频度低的码点用长码表示。
特别需要指出的是,不是所有的短码都可以作为长码的前缀,即不是任何短码都可以是任何长码的若干位。
否则,编码将会不唯一。
所以,要留下若干个短码作为长码的扩展标志,以便长码在扩展编码时使用。
这是扩展编码“扩展”一词的含义。
基于DX永磁同步电机优化设计
基于DX永磁同步电机优化设计王步来;刘祥盛;吉修涛;任攀元;张海刚【摘要】根据技术要求设计了一款额定功率为22 kW的内置式永磁同步电机.首先,根据电机设计原则确定了其主要尺寸,采用探索设计(DX)工具,对内置式永磁同步电机关键参数进行了优化设计,得到电机的主要结构参数和基本性能数据;然后,基于有限元法对该电机做了进一步的仿真研究,得到反电势曲线、转矩曲线以及电机转矩—速度—效率图,验证了电磁设计方案的可靠性;最后,试制了样机并进行相关试验.结果表明,优化设计方案是切实可行的,电机性能符合设计要求.【期刊名称】《电气传动》【年(卷),期】2018(048)009【总页数】5页(P77-81)【关键词】永磁同步电机;探索设计;优化设计;有限元法【作者】王步来;刘祥盛;吉修涛;任攀元;张海刚【作者单位】上海应用技术大学电气与电子工程学院,上海 201418;上海应用技术大学电气与电子工程学院,上海 201418;上海应用技术大学电气与电子工程学院,上海 201418;上海应用技术大学电气与电子工程学院,上海 201418;上海应用技术大学电气与电子工程学院,上海 201418【正文语种】中文【中图分类】TM341目前我国电机的用电量约占全国总用电量的60%,其中风机、泵类、压缩机和空调制冷机的用电量分别占10.4%,20.9%,9.4%和6%。
因此要降低能耗,未来电机的发展趋势必须是高效节能。
永磁电机以其高功率密度、高效率以及良好的动态响应能力,越来越多地受到工业应用、电动汽车等相关领域专家学者的关注。
1 内置式永磁同步电机主要设计原则为加速推进节能减排工程,提高产品使用的能源效率,某生产厂商对其制冷机专用永磁同步电机提出了要求:1)额定功率22 kW,额定转速3 000 r/min;2)效率符合GB 30253—2013《永磁同步电动机的能效限定值及能效等级》中的Ⅰ级能效标准(22 kW,3 000 r/min的变频驱动永磁同步电动机Ⅰ级能效等级效率为95.9%),并在80%~120%额定负载范围内均可保持较高的效率和功率因数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 机械最优化设计 5.3.1 一维优化方法
5.3 无约束优化方法
一维优化方法是最简单、最基本的优化方法,可以实现: 解决一维目标函数的求最优问题; 多维优化问题在既定方向上寻求最优步长的一维搜索。
在多维优化的迭代计算过程中, 在某设计点 X (k ) 确定搜索方向
f1
f3
f2
f2
f3
f2 f3
f1 f1 f
f2
2
f1
f1
3
1 2
2
1
3
3 2 1
1 2 2 1
5 机械最优化设计 5.3.1 一维优化方法
2. 黄金分割法
5.3 无约束优化方法
黄金分割法的算法思想:通过比较单峰区间内两点函数 值,不断舍弃单峰区间的左端或右端一部分,使区间按照 固定区间缩短率(缩小后的新区间和原区间长度之比)逐
5 机械最优化设计 5.3.1 一维优化方法
2. 黄金分割法
黄金分割法的运算步骤
5.3 无约束优化方法
(1)给定初始搜索区间[a , b]和收敛精度 ;
(2)在区间[a , b] 内取两个内分点并计算其函数值:
1 a 0.382 (b a ), f 1 f ( 1 ) 2 a 0.618 (b a ), f 2 f ( 2 )
大多数机械设计问题是约束优化问题;
约束优化问题的求解——转化为一系列无约束
优化问题实现。因此,无约束优化问题的解法
是优化设计方法的基本组成部分,也是优化方
法的基础。
无约束优化问题:一维优化与多维优化。
5 机械最优化设计
5.3 无约束优化方法
5.3.1 一维优化方法
5.3.2 需要梯度信息的多维优化方法
黄金分割法 二次插值法
解决一维目标函数的求最优问题;
多维问题在既定方向上寻最优步长的一维搜索。
f ( X ( k ) d ( k ) ) f ( )
5 机械最优化设计
5.3 无约束优化方法
5.3.1 一维优化方法
5.3.2 需要梯度信息的多维优化方法
5.3.3 不需要梯度信息的多维优化方法
d (k ) 后,还要确定步长因子
以得到新设计点:
f ( X ( k ) d ( k ) ) f ( )
X ( k 1) X ( k ) d ( k )
是函数在方向 d (k ) 使得 X(k 1) 上的极小点。
5 机械最优化设计 5.3.1 一维优化方法
一维搜索的计算步骤
5 机械最优化设计 5.3.1 一维优化方法
1. 搜索区间的确定
5.3 无约束优化方法
估计极小点所在的大致位置,直接给出搜索区间; 进退试算法确定搜索区间。
进退试算法的算法思想:按照一定的规律给出若干试算点,依次
比较各试算点的函数值的大小,直到找到相邻三点的函数值按“高低-高”变化的区间为止。
5 机械最优化设计
5.3 无约束优化方法
5.3.2 需要梯度信息的多维优化方法
1. 梯度法 n元函数的梯度
f ( X ) f ( X ) f ( X ) f ( X ) , ,, x1 x2 xn
若 f1 f 2 ,去掉区间 [a, 1 ] 和 [ 2 , b] ,取新区间 [ 1 , 2 ] ,令:
a 1 , b 2 ;
5 机械最优化设计 5.3.1 一维优化方法
2. 黄金分割法
黄金分割法的运算步骤
5.3 无约束优化方法
(4)判断迭代终止条件
ba
(3)比较函数值 f1 和 f 2 的大小,缩短搜索区间:
5 机械最优化设计 5.3.1 一维优化方法
2. 黄金分割法
5.3 无约束优化方法
黄金分割法的运算步骤
(3)比较试算点函数值,确定搜索方向和区间。 (三种情况)
若 f1 f 2 ,消右区间 [ 2 , b] ,取新区间 [a, 2 ] ,令:
5.3 无约束优化方法
第一步:在给定方向上确定一个包含函数极小点的初始 区间,即:确定函数的搜索区间; 第二步:采用缩小区间或插值逼近的方法得到最优步长, 即:求出该搜索区间的最优步长和一维极小点。 一维搜索的计算方法 利用无约束目标函数的一阶导数为零求解 黄金分割法(0.618法) 二次插值法(近似抛物线法)
步缩短,直到极小点所在的区间缩短到给定的误差范围内,
而得到近似最优解。
序列消去原理
5 机械最优化设计 5.3.1 一维优化方法
黄金分割法的序列消去
5.3 无约束优化方法
f1 f 2
f1 f 2
f1 f 2
f1
f2
f1
f2
f1
f2
a 1 2 b a b
a 1 a
2 b b
a 1 a
《现代设计理论及方法》课程
课堂讲授主要内容
绪论
设计方法学
有限单元法 机械优化设计 机械可靠性设计
机械工程学院 机械装备与控制工程系
第五章 机械最优化设计
5.1 最优化设计的基本概念 5.2 优化方法的数学基础 5.3 无约束优化方法
5.4 约束优化方法
5 机械最优化设计
5.3 无约束优化方法
5.3 无约束优化方法
(1)给定初始搜索区间和计算精度; (2)计算二次插值结点及其函数值; (3)构造二次插值函数,计算其极小值及对应的目标函数值;
(4)缩短单谷搜索区间(分四种情况讨论); (5)判断迭代终止条件。
5 机械最优化设计 5.3.1 一维优化方法
5.3 无约束优化方法
搜索区间的确定
பைடு நூலகம்
1 a 0.382 (b a ) 4.292 2 a 0.618 (b a ) 5.708
f1 f (1 ) 1.623 f 2 f ( 2 ) 2.625
(3)比较内分点函数值,缩短搜索区间
f1 f 2 消去右区间[5.708,8] 构造新区间[a,b]=[2,5.708]
(4)缩短单谷搜索区间(分四种情况讨论);
5 机械最优化设计 5.3.1 一维优化方法
f1
2 4 f2 f4
5.3 无约束优化方法
二次插值法的区间缩短
f3 f3
f1 f2 f2
f3
f3
2 4 f2 f4
f1
f4
f1 f2
f2 f4
1 1
2 2
4 3
1
3
f3
2 1 4.292
f 2 f1 1.623
f1 f 2
1 a 0.382 (b a ) 3.416 f1 f (1 ) 2.243 黄金分割法 程序实现
5 机械最优化设计 5.3.1 一维优化方法
M= 2.0000 2.0000 2.0000 2.8755 2.8755 3.2099 3.4165 3.4165 3.4165 3.4653 3.4653 3.4839 3.4954 3.4954 3.4954 8.0000 5.7080 4.2920 4.2920 3.7509 3.7509 3.7509 3.6232 3.5443 3.5443 3.5141 3.5141 3.5141 3.5070 3.5026 4.2920 3.4165 2.8755 3.4165 3.2099 3.4165 3.5443 3.4954 3.4653 3.4954 3.4839 3.4954 3.5026 3.4998 3.4981 5.7080 -1.6227
设单谷区间 [ 1 , 3 ],该区间内的一点 1 2 3 , 则有 f (1 ) f ( 2 ), f ( 2 ) f ( 3 )
5 机械最优化设计 5.3.1 一维优化方法
1. 搜索区间的确定
进退试算法的运算步骤:
5.3 无约束优化方法
(1)给定初始点和初始步长;
(5)输出一维优化的最优解
ab x , 2
f f (x )
5 机械最优化设计 5.3.1 一维优化方法
2. 黄金分割法
算例: f ( ) 2 7 10 (1)已知初始区间和计算精度
5.3 无约束优化方法
[a, b] [2,8]; 0.25
(2)在给定初始区间内取两个内分点并计算其函数值
(2)确定试算点及相应的函数值;
(3)比较试算点函数值,确定搜索方向和区间。
5 机械最优化设计 5.3.1 一维优化方法
5.3 无约束优化方法
1. 搜索区间的确定 (3)比较试算点函数值,确定搜索方向和区间。 若 f (1 ) f ( 2 ) ,说明极小点在试算点的右侧,前进试算;
f 2 f3 f 2 f3
5.3 无约束优化方法
2.6253
6.0000 3.7080 2.2920 1.4165 0.8754 0.5410 0.3345 0.2067 0.1278 0.0790 0.0488 0.0302 0.0187 0.0115 0.0072
4.2920 -2.2430 -1.6227 3.4165 -1.8601 -2.2430 3.7509 -2.2430 -2.1870 3.4165 -2.1659 -2.2430 3.5443 -2.2430 -2.2480 3.6232 -2.2480 -2.2348 3.5443 -2.2500 -2.2480 3.4954 -2.2488 -2.2500 3.5141 -2.2500 -2.2498 3.4954 -2.2497 -2.2500 3.5026 -2.2500 -2.2500 3.5070 -2.2500 -2.2500 3.5026 -2.2500 -2.2500 3.4998 -2.2500 -2.2500