CAM58C10-BF6XXR-4096-8192编码器
Kuebler 580X 582X增量编码器商品介绍说明书

• Sturdy model to industry standard, ø58 mm housing• Many variations, also customized versions • Short-circuit proof outputs • Reverse connection protection (at U B = 10 ... 30 V DC)• Highly flexible PUR-cable • Resolution up to 36000 ppr • High shaft loadShaft/hollow shaft 5800/5820: Standard5803/5823: High temperature up to 110 °C 5804/5824: Voltage sine wave outputs 5805: High resolution up to 36000 ppr 5826: Stainless steel housingMechanical characteristics:Electrical characteristics RS422/Push-pull:Speed with seal: Shaft version max. 12000 min -1Hollow shaft version 5)max. 000 min -1Speed without seal: Hollow shaft version max. 12000 min -1Rotor moment of inertia: Shaft version approx. 1.8 x 10-6kgm 2Hollow shaft version approx. 6 x 10-6kgm 2Starting torque: Shaft version < 0.01 NmHollow shaft version <0.05 Nm Radial load capacity of shaft*: 80 N Axial load capacity of shaft:*: 40 NWeight: approx. 0.4 kgProtection acc. to EN 60 529: IP 65, IP 66 for type 5826Working temperature: -20 °C ... +85 °C 1)2)3)5803/5823: -20 ... + 105 °C Shaft: stainless steel Shock resistance acc. to DIN-IEC 68-2-27 1000 m/s 2, 6 msVibration resistance acc. to IEC 68-2-6: 100 m/s 2, 10...2000 HzOutput circuit: RS 422 RS 422 Push-pull Push-pull (TTL-compatible) (TTL-compatible)Supply voltage: 5 V (±5%) or 5 ... 30 V DC 10 ... 30 V DC 5 ... 30 V DC 10 ... 30 V DCPower consumption (no load) – – typ. 55 mA / typ. 55 mA /without inverted signal: max. 125 mA max. 125 mA Power consumption (no load) typ. 40 mA / typ. 40 mA / typ. 80 mA/ typ. 80 mA/with inverted signals: max. 90 mA max. 90 mA max.150 mA max.150 mA Permissible load/channel: max. ±20 mA max. ±20 mA max. ±30 mA max. ±30 mA Pulse frequency: max. 300 kHz max. 300 kHz max. 300 kHz max. 300 kHz Signal level high: min. 2.5 V min. 2.5 V min. UB-2.5 V min. UB-1.5 V Signal level low: max. 0.5 V max. 0.5 V max. 2.0 V max. 2.0 V Rise time t r max. 200 ns max. 200 ns max. 1 µs max. 1 µs Fall time t f max. 200 ns max. 200 ns max. 1 µs max. 1 µs Short circuit proof outputs:1): yes 2) yes 2) yes yes Reverse connection protection at U B : 5 V: no, 1 yes yes no 0 ... 30 V: yes UL certified File 224618Conforms to CE requirements acc. to EN 61000-6-2, EN 61000-6-4 and EN 61000-6-3RoHS compliant acc. to EU guideline 2002/95/EG1)If supply voltage correctly applied2)Only one channel allowed to be shorted-out:(If UB=5 V, short-circuit to channel, 0 V, or +UB is permitted)(If UB=5-30 V, short-circuit to channel or 0 V is permitted)1) Constant flexing: -20 ... +70 °C 2)Non-condensing3)Hollow shaft version with seal: -20 ... +80 °C 5) For continuous operation 3000 min -1, ventilatedElectrical characteristics sine wave output:Output circuit: Sine wave Sine wave U = 1 Vpp U = 1 Vpp Supply voltage: 5 V (±5%) 10 ... 30 V DC Current consumption typ. 65 mA / typ. 65 mA / (no load) with inverted signals: max. 110 mA max. 110 mA -3 dB frequency: <180 kHz <180 kHz Signal level channels A/B: 1 Vpp (±20%) 1 Vpp (±20%) Signal level channel 0: 0.1 ... 1.2 V 0.1 ... 1.2 V Short circuit proof outputs:1): yes yes Reverse connection protection at UB: no yes UL certified File 224618Conforms to CE requirements acc. to EN 61000-6-2, EN 61000-6-4 and EN 61000-6-3RoHS compliant acc. to EU guideline 2002/95/EG1) If supply voltage correctly appliedTop view of mating side, male contact base:12 pin plug7 pin plug10 pin plugDimensions shaft version:Clamping flange ø 58Flange Type 1Mounting advice:The flanges and shafts of theencoder and drive should not both be rigidly coupled together at thesame time! We rec-ommend the use of suitable couplings (see Accessories section).I n c r e m e n t a l E n c o d e r sSignal: 0 V 0 V +U B +U B A A B B 0 0 Schirm Sensor 2) Sensor 2)12-pin. Connector, Pin: 10 11 12 2 5 6 8 1 3 4 PH 1)7-pin. Connector, Pin: F –- D E A – B – C - G 10-pin. Connector, Pin: F - D E A G B H C I J Cable colour: 5800, 5803, WH WH . BN BN . GN YE GY PK BU RD 5804, 5805, 5823, 5824, 5825: 0,5 mm 2 0,5 mm 2Cable colour: 5820, 5826: WH GY PK BN BU RD GN YE GY PK BU RDTerminal assignment1) PH = Shield is attached to connector housing2) The sensor cables are connected to the supply voltage internal-ly if long feeder cables are involved they can be used to adjust or control the voltage at the encoder- If sensor cables are not in use, they have to be isolated or 0 V Sensor has to be connected to 0 V and U BSensor has to be connected to U B- Using RS 422 outputs and long cable distances, a wave impedance has to be applied at each cable end.Isolate unused outputs before initial startup.Synchronous flange ø 58Flange Type 2- flexibly installed: 70 mmDimensions shaft version:3 x M3, 5 [0,2] deepOrder code shaft version:8.580X.XXXX.XXXXType00 =Standard03 =High temperature 04 =Sine wave 05 =High resolutionFlange1 = Clamping flange ø 582 = Synchronous flangeø 58Shaft (ø x L)1 = ø 6 mm x 10 mm2 = ø 10 mm x 20 mmType of connection and supply voltage Type 58004 = RS 422 (with inverted signal)5 V supply voltage5 = RS 422 (with inverted signal)10 ... 30 V supply voltage6 = Push-pull (with inverted signal)10 ... 30 V supply voltage7 = Push-pull (without inverted signal)10 ... 30 V supply voltage8 = Push-pull (without inverted signal)5 ... 30 V supply voltage9 = Push-pull (with inverted signal)5 ... 30 V supply voltageY = RS 422 (with inverted signal)5 ... 30 V Supply voltageT = Push-Pull (with inverted signal)5 ... 30 V supply voltagePulse rate25, 50, 60, 100, 125, 200, 250, 256, 300, 360, 500, 512, 600, 720, 800, 1000, 1024, 1200, 1250, 1500, 2000, 2048, 2500, 3000,3600, 4000, 4096, 5000Type 5805: 6000, 7200, 8000, 8192,9000, 10000, 18000, 36000(e.g. 250 pulses => 0250)Other pulse rates available on requestType of connection1 = Cable axial (1 m PUR-Cable)2 = Cable radial (1 m PUR-Cable)3 = axial 12 pin plug withoutmating connector5 = radial 12 pin plug withoutmating connector W 1)= 7 pin plug, "MIL"-specified 2)without mating connector, radial Y = 10pin plug, "MIL"-specified 2)without mating connector, radial1)only with output 72)only for type 5800Accessories:Corresponding mating connector to connection type 3 or 5:Order-No. 8.0000.5012.0000Corresponding mating connector to connection type W:Order-No. 8.0000.5052.0000Corresponding mating connector to connection type Y:Order-No. 8.0000.5062.0000Cables and connectors, also pre-assemb-led, can be found in the chapter Counting TechnologyMounting attachments and couplings can be found in the Chapter AccessoriesP r e f e r r e dt y p e s a r e i n d i c at e d i n b o l dType 5803 and 58054 = RS 422 (with inverted signal)5 V supply voltage5 = RS 422 (with inverted signal)10 ... 30 V supply voltage6 = Push-pull (with inverted signal)10 ... 30 V supply voltage7 = Push-pull (without inverted signal)10 ... 30 V Supply voltageType 58041 = Sine, 1 Vpp (with inverted signal)5 V supply voltage2 = Sine, 1 Vpp (with inverted signal)10 ... 30 V Supply voltageDimensions hollow shaft:Flange Type 3 and 4 with stator couplingCyl. pin acc. to DIN 7 ø 4Mounting advice:1)The flanges and shafts of the encoder and drive should not both be rigidly coupled together at the same time.2)When mounting a hollow shaft encoder,we recommend using a torque stop pin that fits into the torque stop slot or a sta-tor coupling.3)When mounting the encoder ensure the dimension Lmin. is greater than the axial maximum play of the drive. Otherwise there is a danger that the device could mechanically seize up.Note: minimum insertion depth 1.5 x D hollow shaftM3, 5 [0,2] deepI n c r e m e n t a l E n c o d e r sOrder code hollow shaft version:8.582X.XXXX.XXXXType20 =Standard23 =High temperature 24 =Sine wave 25 =High resolution 26 =Stainless steelFlange1 = Flange for through shaft2* = Flange for blind hollow shaft*3* = Flange for through shaft andstator coupling4* = Flange for blind hollow shaft andstator couplinglength of drive shaft £30 mm*not for type 5826Hollow shaft**1 = ø 6 mm without seal2 = ø 6 mm with seal3 = ø 8 mm without seal4 = ø 8 mm with seal5 = ø 10 mm without seal6 = ø 10 mm with seal7 = ø 12 mm without seal8 = ø 12 mm with sealFor type 5826 only versions 6 and 8 are possiblePulse rate25, 50, 60, 100, 125, 200, 250, 256, 300, 360, 500, 512, 600, 720, 800, 1000, 1024, 1200, 1250, 1500, 2000, 2048, 2500, 3000,3600, 4000, 4096, 5000Type 5825: 6000, 7200, 8000, 8192,9000, 10000, 18000, 36000(e.g. 250 pulses => 0250)Other pulse rates available on requestType of connection1 = Cable radial (1 m PVC-cable)21) = radial 12pin plug withoutmating connector1)not for type 5826Type of connection and supply voltage Type 5820 and 58261 = RS 422 (with inverted signal)5 V supply voltage2 = Push-pull (without inverted signal)10 ... 30V supply voltage3 = Push-pull (with inverted signal)10 ... 30V supply voltage4 = RS 422 (with inverted signal)10 ... 30 V supply voltage5 = Push-pull (without inverted signal)5 ... 30 V supply voltage6 = Push-pull (with inverted signal)5 ... 30 V supply voltage7 = RS 422 (with inverted signal)5 ... 30 V supply voltageC* =Push-pull (7272 with inverted sig-nal)5 ... 30 V supply voltage * For Type 5826 not availableType 5823 and 58251 = RS 422 (with inverted signal)5 V supply voltage2 = Push-pull (without inverted signal)10 ... 30V supply voltage3 = Push-pull (with inverted signal)10 ... 30V supply voltage4 = RS 422 (with inverted signal)10 ... 30 V supply voltageType 58241 = Sine, 1 Vpp (with inverted signal)5 V supply voltage2 = Sine, 1 Vpp (with inverted signal)10 ... 30 V supply voltageP r e f e r r e dt y p e s a r e i n d i c at e d i n b o l dAccessoriesCorresponding mating connector to Type of connection 2,12 pin: Order No. 8.0000.5012.0000 pin assignment cwVarious mounting variations can be suppliedDelivery includes:1 x parallel pin with thread Order No. 8.0010.4700.00001 x mounting flanges Order No. T.035.009Screw M3x5Order No N.630.3051 x long torque support slot Order No. T.051.672Complete set:Order No. 8.0010.4600.0000Mounting kit for hollow shaft encoder ø 58 mm:Stator coupling two wings– For highly dynamic applications Includes:1x coupling two wings 2x 2 screwsComplete set:Order No. 8.0010.4D00.0000Tether arm shortOrder No. 8.0010.4R00.0000– Cables and connectors, also pre-assemb-led, can be found in the chapter Counting Technology– Mounting attachments and couplings can be found in the Chapter Accessories。
博乐583和563XL音频宏缩放超声8音频摄影机说明书
欧诺克 旋变解码板使用说明书 产品说明书

旋变解码板使用说明书Rotary transformer resolution manual深圳市欧诺克科技有限公司1旋变解析卡型号说明RS 10- 10 07 I 09RS:resolver(解析器)额定电压I:increament (增量式)10:1024线励磁电压10:10KHz解析器型号编码器线额定电压激励频率励磁电压RS10-1003I09102418~90VDC 10KHz 2.4VACrms RS10-1003I18102418~180VDC 10KHz 2.4VACrms RS10-1007I09 102418~90VDC 10KHz 7VACrms RS10-1007I18102418~180VDC10KHz7VACrms旋变解析卡型号汇总编码器线激励频率03:2.4VACrms 07:7VACrms编码器09:18~90VDC 18:18~180VDC旋变解码板1、产品概述本产品由深圳市欧诺克科技有限公司生产的旋变解码板主要用于旋变解码,可以将旋变信号转换为光电编码器的信号格式(A+、A-、B+、B-、Z+、Z-),输出位数12位,对应仿真增量式编码器为1024 线。
2、技术指标(1)外形尺寸:≤80mm×70.8mm×24.5mm (长×宽×高);(2)电源输入:20-90VDC或者20-180VDC;(3)工作温度:-20℃~+85℃;(4)激励频率:10KHz;(5)励磁电压:7VACrms或者2.4VACrms;(6)支持旋变类型:变压比为 0.5 的绕线式旋变和变压比为 0.286 的磁阻式旋变;3、性能特点(1)采用电源隔离技术:内部电源与外部输入电源隔离,满足客户可靠性和抗干扰性能的要求;(2)ESD 安全设计:对解码板旋变激励信号、旋变正余弦信号进行 ESD 保护设计,提供高达2KV 的 ESD 保护功能;(3)增强型激励信号驱动技术:本产品设计的激励信号驱动电流最高可达1.8A,满足绝大部分旋变激励的需要;(4)旋变激励信号输出保护电路设计;解码板输出的旋变激励信号发生异常短路时,不会损坏产品,提高了产品可靠性;4 、接口定义(1)J1 接口定义(编码器接口)解码板端采用 ZH1.5-11AW或XH2.5-7P连接器,本公司会配上这个端子的连接线。
PAMM58C10-BF6XXR-4096-8192编码器

PAMM58C10-BF6XXR-4096/8192编码器简介 应用行业:一. BEN 绝对值编码器的常规外形:38MM,58MM,66MM,80MM.100MM.二. BEN 绝对值编码器分为:单圈,多圈。
三. BEN 绝对值编码器按原理分为:磁绝对值编码器,光电绝对值编码器四. BEN 绝对值编码器出线方式分为:侧出线,后出线五. BEN 绝对值编码器轴分为:6MM,8MM,10MM,12MM,14MM,25MM.六. BEN 绝对值编码器分为:轴,盲孔,通孔。
七.BEN 绝对值编码器防护分为:IP54-68.八. BEN 绝对值编码器安装方式分为:夹紧法兰、同步法兰、夹紧带同步法兰、盲孔(弹簧片,抱紧)、通孔(弹簧片,键销)九. BEN 绝对值编码器精度分为:单圈精度和多圈精度,加起来是总精度,也就是通常的多少位(常规24位,25位,30位,32位。
)。
十. BEN 绝对值编码器通讯协议波特率:4800~115200 bit/s,默认为9600 bit/s。
刷新周期约1.5ms ★精芬机电传感器 * 机床 * 航天航空、 * 造纸印刷、 * 水利闸门、 * 纺织机械 * 灌溉机械 * 军工设备 * 食品机械 * 钢铁冶金设备 * 机器人及机械手臂 * 港口起重运输机械 * 精密测量和数控设备PAMM58C10-BF6XXR-4096/8192编码器 外形尺寸PAMM58C10-BF6XXR-4096/8192编码器技术参数BEN编码器的发展,从增量值编码器以转动时输出脉冲,通过计数设备来计算其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。
这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备计算并记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。
解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。
Motor Driver HAT 用户手册说明书
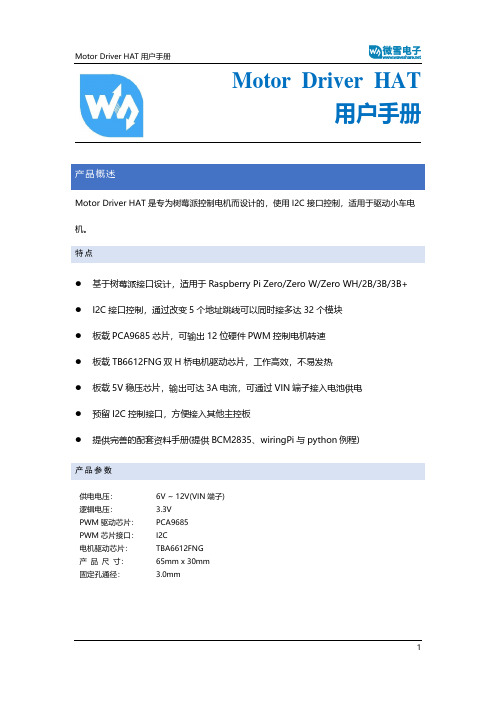
Motor Driver HAT用户手册产品概述Motor Driver HAT是专为树莓派控制电机而设计的,使用I2C接口控制,适用于驱动小车电机。
特点⚫基于树莓派接口设计,适用于Raspberry Pi Zero/Zero W/Zero WH/2B/3B/3B+⚫I2C接口控制,通过改变5个地址跳线可以同时接多达32个模块⚫板载PCA9685芯片,可输出12位硬件PWM控制电机转速⚫板载TB6612FNG双H桥电机驱动芯片,工作高效,不易发热⚫板载5V稳压芯片,输出可达3A电流,可通过VIN端子接入电池供电⚫预留I2C控制接口,方便接入其他主控板⚫提供完善的配套资料手册(提供BCM2835、wiringPi与python例程)产品参数供电电压:6V ~ 12V(VIN端子)逻辑电压: 3.3VPWM驱动芯片:PCA9685PWM芯片接口:I2C电机驱动芯片:TBA6612FNG产品尺寸:65mm x 30mm固定孔通径: 3.0mm接口说明模块实物图如下:硬件资源硬件上实际上由三部分构成:电源、PWM、电机驱动电源输入端采用MP1584稳压芯片,该芯片支持4.5V到28V的宽电压输入,输出电流达3A。
虽然芯片支持最高28V的输入,但是由于给电机的工作电压也由VIN_USER供给,实际上输入电压最好保持在6-12V.MP1584稳压芯片输出5V,这个5V用于给树莓派供电,然后5V再通过RT9193-33转成3.3V电平,该电平给PWM、电机驱动这两部分提供逻辑电压PWM由于树莓派硬件PWM只有一个引脚GPIO.1,而且,虽然wiringPi库与python都有软件PWM,但是会占用部分CPU资源,因此本模块采用PCA9685芯片,该芯片使用I2C控制,可输出16路12位分辨率的PWM,可控制输出频率40HZ-1000HZ。
操作简单,只需要给芯片控制对应寄存器的值,即可一直输出PWM信号。
根据上面的原理图,我们可以看出LED0-LED5为控制电机驱动芯片管脚。
c8051f005

新华龙电子有限公司 Tel: (024)23930366 Fax: (024) 23940230 CYGNAL C8051F005模拟外设12位100KSPS ADC 1LSB INL 无失码可编程转换速率最大100ksps8个外部输入可编程为单端输入或差分输入 可编程放大器增益1684210.5 数据相关窗口中断发生器内置温度传感器3°C 两个12位DAC 电压输出10微秒建立时间 两个比较器16个可编程滞回电压值 可用于产生中断或复位 基准源2.4V 15ppm/°C 外部基准输入VDD 监视器和节电降压检测器 片内JTAG 仿真片内JTAG 仿真电路提供全速非侵入式的电路内仿真支持断点单步观察点 观察/修改存储器和寄存器比使用仿真芯片目标仿真头和仿真插座的仿真系统有更好的性能完全符合IEEE1149.1¥1560仿真套件C8051F005DK8051兼容的微控制器内核流水线指令结构70%的指令的执行时间为一个或两个系统时钟周期速度可达25MIPS 时钟频率为25MHz时 增强的中断系统可有最多22个中断源 存储器2304字节数据存储器32K 字节闪速存储器可以在系统编程扇区大小为512字节 数字外设32个I/O 口线所有口线均容许5V 电压可同时使用的硬件I 2C TM /SMBus TM SPI TM 及UART 串口16位可编程的计数器/定时器阵列带5个捕获/比较模块每一个都可配置为8位PWM 4个通用16位计数器/定时器 专用的看门狗定时器双向复位 时钟源内部可编程振荡器2-16MHz外部振荡器晶体RC C 或外部时钟 可在运行中切换时钟源节电模式时使用 供电电压………………………………2.7V - 3.6V 典型工作电流12mA @ 25MHz 多种节电休眠和停机模式 64脚TQFP 封装温度范围-40°C - +85°CI 2C 是菲力蒲半导体的注册商标SMBus 是英特尔公司的注册商标SPI 是摩托罗拉的注册商标TCK TMS TDI TDO DAC0AIN0AIN1AIN2AIN3AIN4AIN5AIN6AIN7P1.0P1.1P1.2P1.3P1.4P1.5P1.6P1.7P0.0P0.1P0.2P0.3P0.4P0.5P0.6P0.7P3.0P3.1P3.2P3.3P3.4P3.5P3.6P3.7P2.0P2.1P2.2P2.3P2.4P2.5P2.6P2.7DAC1CP0+CP0-CP1+CP1-VREFAV+AV+VDD VDD VDD DGND DGND DGND AGND AGND/RSTXTAL1XTAL2新华龙电子有限公司 Tel: (024)23930366 Fax: (024) 23940230 CYGNAL C8051F005选定的电气技术条件 TA=-40- +85除非另有说明参 数条 件最小值典型值最大值单位总体特性 模拟电源电压 2.7 3.6 V模拟供电电流内部REF ADC DAC 比较器全部处于运行状态0.8 mA 模拟子系统被禁止时的 模拟供电电流 内部REF ADC DAC 比较器全部处于禁止状态5 A 数字电源电压 2.7 3.6 V CPU 运行时的 数字供电电流Clock=25MHz Clock=1MHzClock=32KHz 12 0.520 mA mA ACPU 处于停机模式的 数字供电电流振荡器停止2 A VDD 数据维持电压 RAM 保持有效1.5 V CPU 和数字I/O时钟频率范围DC 25 MHz 端口输出高电压 I OH =-3mA I/O 口上拉VDD - 0.7 V 端口输出低电压I OL =8.5mA 0.6 V 输入高电压 0.8VDDV 输入低电压 0.2VDDV SMBus SCL 频率 SYSCLK=MCU 系统时钟SYSCLK/8 MHz SPI 总线时钟频率 SYSCLK=MCU 系统时钟SYSCLK/2 MHz A/D 转换器分辨率 12 比特积分非线性1 LSB 微分非线性 保证单调1 LSB 转换速率100 ksps 输入电压范围0 VREF V D/A 转换器分辨率 12 比特积分非线性 从数据字014h 到FEBh4 LSB 微分非线性 保证单调1 LSB 偏移误差 数据字=014h3 LSB 输出建立时间 到满度值的 ½ LSB10 S 输出电压摆幅0 VREF-1LSB V 比较器供电电流 每个比较器1.5 A 响应时间4 S 输入电压范围-0.25 (A V+) + 0.25 V 输入偏置电流-5 0.001 +5 nA 输入偏移电压-10 +10 mV。
JZB-8192接触式绝对编码器说明书

★ 该编码器为组网型,一个上位机可带多个编码器。
★ 我公司可以根据用户需求改变以上通讯协议,如波特率、数据格式等。
(2)MODBUS 通讯协议: 采用 MODBUS - RTU(远程终端单元)模式进行通讯
恒远(SUNEST)系列编码器实现 Modbus 通信协议时,均作为从机,遵循 Modbus 通信过程,
增量)
⑨工作电压
光电编码器工作电压:5V、5-12V、12-24V 或根据用户要
JZB-8192 系列接触式多圈绝对编码器
求 三、主要技术指标:
产品型号 JZB-8192
主要尺寸
电源电压
外径Φ64、12~24V
轴径:Φ6、 或 根 据 用
Φ8、Φ10 户要求
说明 说明:本编码器为双级编码器,L0-L6 为低位码盘数据线,H0-H6 为高位码盘数据线,H0 为消除 级间连接误差判定位(详见正天循环码编码规律),NC 为空脚;COM 为公共端。 2、RS485 串行通讯(有正天通讯协议和 Modbus 协议) (1)正天通讯协议:
波特率: 1200 bps、2400bps、4800 bps、9600 bps 可供用户选择(用户不指定时为 2400bps)。 帧格式:1 位起始位 8 位数据位 1 位校验位(偶) 1 位停止位(数据为十六进制) 1、 读数据:
通讯协议(正天协议):用于修改 4mA 及 20 mA 对应值(通过 RS485 接口)
波特率: 1200 bps、2400bps、4800 bps、9600 bps 可供用户选择(用户不指定时为 2400bps)。
帧格式: 1 位起始位 8 位数据位 1 位校验位(偶)1 位停止位(数据为十六进制)
1、 读数据: (地址出厂时已设为 01)
ORICOD编码器

BEN绝对值编码器BE622SM58说明书精芬机电绝对值编码器并行输出信号说明书* 单圈绝对值并行信号输出* 12位4096线分辨率* 宽工作电压范围,10~30Vdc或5Vdc,极性保护,顺、逆方向测量可设。
* 宽工作温度范围,-25~70℃;储存温度:-40~100℃* 并行推挽输出,正、负逻辑可选,绝对值格雷码,可直接连接各种设备* 夹紧法兰或同步法兰,国际标准型外形,其他外形可选* 用于恶劣环境条件下的绝对值编码器(潮湿、灰尘、冲击和振动)在使用编码器前,请完整阅读下面的说明,正确使用!特性参数一、接线说明:12位16芯连接电缆二、外形尺寸:夹紧法兰外形尺寸:同步法兰外形尺寸:三、输出信号Be622 PB的输出为并行推挽式输出信号,与PLC的输入模块(I/O)连接如下图:注意:编码器并行信号线高电平有效,适用于NPN 、PNP等信号类型。
其中NPN为低电平信号有效,PNP为高电平有效四、注意事项:*编码器属精密仪器,请勿敲击或撞击编码器,轻拿轻放,小心使用;*保证编码器电源在10-30Vdc范围内,并做隔离,防止电网内大型起动电气对编码器产生冲击;* 在强电磁干扰的环境下,信号线最好使用专用线,如对绞双屏蔽电缆,可向本公司订购;* 编码器信号线应做到良好接地:2米内近距离,电缆屏蔽网两端均应接地;较远距离,编码器金属外壳接地,编码器自带电缆屏蔽网悬空,信号加长电缆屏蔽网在信号接收端单端接地;若信号电缆较长或在户外使用时,应将信号电缆套上金属铁管,并且将金属管两端接地使用;* 编码器的防护等级为IP65,(附检测报告备索),可防水使用,但编码器转轴处请勿浸水。
* 编码器轴与机械连接应选用专用的柔性联轴器,推荐使用F60022。
附推荐的编码器联轴器:S: M4S: M41.ORICOD其余产品型号:BEN总公司介绍,JFSH旗下编码器,DXS58/1213ECL10PGBR010绝对值多圈编码D XS58/1213ECL10LBR010绝对值编码器D XM58/1213ECL10R4BR010绝对值总线编码器D XM58/1213ECL10DPBR01,DXM58/1212ECS10SGBR010,DXSM58/1212ECS10LBS详谈见上面编码器图片联系方式。
内策尔容栅编码器参数
内策尔(Netzer)容栅编码器是一种用于精确测量旋转轴位置的设备,它通过电容感应原理来实现非接触式的位置检测。
以下是一些关于内策尔容栅编码器的主要参数:
1. 产品型号:内策尔提供多种型号的容栅编码器,如DS25、DS37、DS58、DS70、DS90和DS130等,以满足不同应用场景的需求。
2. 外径尺寸:这些编码器的外径范围从16mm到300mm不等,适用于各种不同的机械尺寸和空间限制。
3. 分辨率:分辨率是指编码器能够区分的最小角度变化,这通常取决于编码器的设计和内部结构。
4. 工作温度:编码器能够在一定的温度范围内正常工作,这个范围定义了其适用的环境条件。
5. 输出接口:编码器可能提供多种输出接口,如模拟信号、数字信号、SSI或SPI等,以便于与不同的控制系统连接。
6. 电源电压:编码器工作时所需的电源电压范围。
7. 最大转速:编码器能够承受的最大旋转速度,超过此速度可能会影响其性能或损坏设备。
8. 防护等级:编码器的防尘防水等级,如IP65或IP67,表示其对环境条件的适应能力。
16路高清解码器_产品技术参数
菜单中对于相同设置可进行快捷复制粘贴操作。
开发支持
提供对解码器操作的SDK开发包;提供演示软件,及开发说明。
被动接收
在转发模式下,解码器准确接收由网络服务器转发的任意数据流,实现解码输出。
输出
画面分割
NVS1604DH所有屏支持1/4画面分割。
显示轮巡
NVS1604DH设备同时具备16个VGA接口、16个HDMI接口。
报警
外部报警
具备多路继电器开关量报警输出,便捷实现报警联动外部报警设备(如:现场的灯光)控制,手动控制,联动画面输出。
实时流解码
对编码器本地编码数据实时获取并解码输出。
历史流解码
对编码器本地已经存储的历史数据,获取并解码输出。
信息反馈
各应用端可准确获知当前解码状态。
用户管理
帐号管理
添加、删除、修改用户或者用户组,修改用户密码。
权限管理
对不同的用户,支持设置不同的权限。
安全管理
密码登录;密码出错5次,帐号锁定。
其他
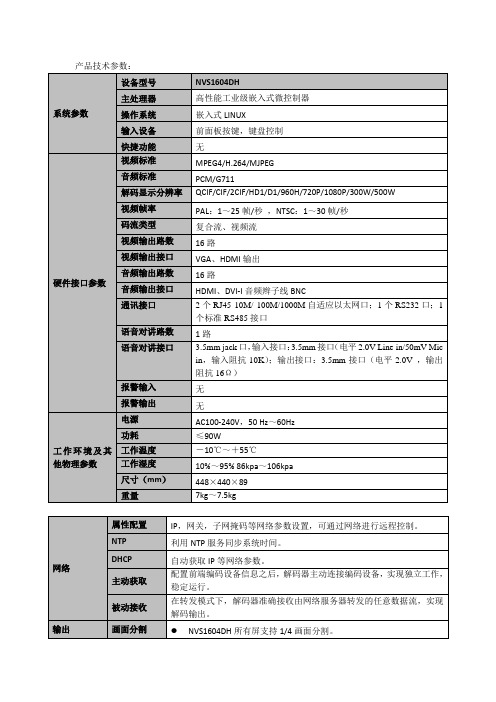
版本信息产品技术参数: Nhomakorabea系统参数
设备型号
NVS1604DH
主处理器
高性能工业级嵌入式微控制器
操作系统
嵌入式LINUX
输入设备
前面板按键,键盘控制
快捷功能
rcm58雷恩编码器precilec工作原理
rcm58雷恩编码器precilec工作原理
RCM58雷恩编码器是一种高精度的角度测量装置,能够精确地测量旋转角度和角速度。
它采用了Precilec的技术和构造,具有高速、高分辨率和高抗干扰性等优点,广泛应用于机床、汽车、航空、卫星、医疗等领域。
RCM58雷恩编码器的工作原理基于编码盘与光电传感器之间的作用。
编码盘是一种由
光透明材料制成的圆形盘,表面上分成了等分的小块,每个小块称为编码位。
在编码盘上
的编码位是不以任何方式提供定位或位置反馈信号的,但可以根据它们的排列模式确定精
确定位的位置。
RCM58雷恩编码器使用一个或多个光电传感器来感知编码器盘上的反射光线,并将其
转换为数字信号,然后通过解码器将其转换为真实的测量角度值。
光电传感器通常是由一
个发光二极管和一个光电二极管组成,放置在编码盘的两侧以便测量旋转角度。
当编码盘
旋转时,某一编码位上的反射光线会穿过光电传感器,产生一个电信号,这个电信号会被
放大并转换成数字信号被编码器解码器解读成真实的角度值。
每次旋转时,编码器输出一
个新的数字信号,以确定经过的角度。
在高精度应用中,编码盘与光电传感器之间的误差
是必须考虑的,以确保测量结果的精确性。
RCM58雷恩编码器常常具有高速、高精度和高抗干扰性。
高速指的是编码器能够在很
短的时间内输出精确的测量数据,通常在数十万转/秒的范围内。
高精度指的是编码器能
够提供非常精确的角度测量结果,通常在弧度和角度分辨率方面高达0.001度。
高抗干扰
性指的是编码器能够在各种恶劣环境下工作,如高温、低温、振动、尘埃和湿度等。
SUNX 神视传感器目录(二位编码读取器)

ਗ਼ᆇ؋უփፁ ቕൣဢᅂ
采用光线引导 红色LED 后便可安装,并可简单设定。
2 束引导光线可大力协助现场的设置。在红色 LED 光的引导 下,可立即发现最佳设置点。
ᄽহ ߲
强化了专用工具软件“PDTOOL”的功能,可简单设定其他 更高级的功能。可从本公司网页中免费下载。
LP-400
卓越的耐油结构(IP67G※2)。
可简单设定其他功能的专用工具软件“PDTOOL”。
LP-V/W
ANUP5204
UJ20
GD
GP-A
GP-X
LA-300
HL-T1
以双信号来读取。 即使在运转中也可通过目测法确认是否 读取OK…绿色光+蜂鸣音 读取NG…橙色光
ยۨ ኧ
ӝ܁ൽᄓتࡗײዐಆฝڦၟत܁ൽ ࡕԍ٪ሞۉసዐă
ۙবఇ๕
ӝཚࡗPDTOOLԍ٪ڦฝᆖၟฉدPD60Lj ႴཚࡗܾྼஓڦฝၟՍᅜူሜڦၟຕ ڦยۨ܁ൽཉॲă
ĐPDTOOLđٗࢫ௬ྪᄻዐ௨ူݯሜăwww.naislj/vision/
耐油结构(IP67G※2),即使附有油垢也不必担心。
十分重视用户的使用环境,即使工作手套上附有机油及清洗剂也能放心使用实现同行业中绝无仅有的耐油结构(IP67G※2)。
PD60 PD65
金属双层重叠检测
USBথഗ USBথഗ
便于维修的结构。
为便于今后商品中发生故障时也能更换控制器,应以带耐油 结构的连接器连接电缆部分。可避免卷缠接线的繁琐作业, 且拥有立即恢复现场原状的合理性结构。
Kenwood TK-941 Conversion 33-centimeter Programmin
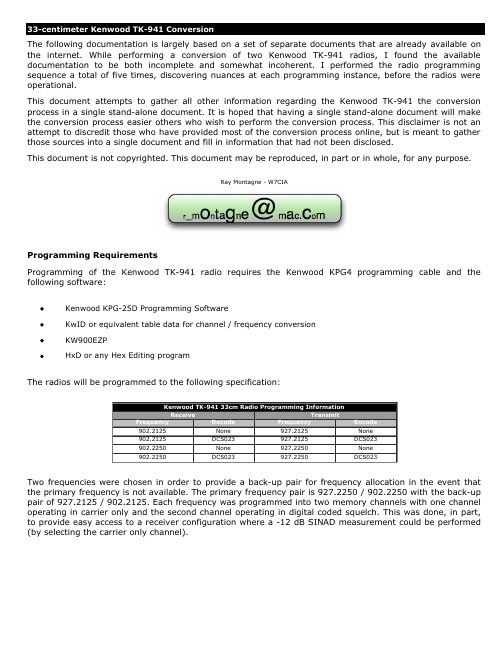
Ray Montagne - W7CIAThe frequency must be converted to a Kenwood Channel Number prior to programming. The following table, obtained from the KW900EZP program documentation by K2MCI, is used to obtain the channel number for the target frequencies:927 902919907920908921909926903 801602403200.00001811612413210.0125 2821622423220.0250 3831632433230.0375 4841642443240.0500 5851652453250.0625 6861662463260.0750 7871672473270.0875 8881682483280.1000 9891692493290.1125 10901702503300.1250 11911712513310.1375 12921722523320.1500 13931732533330.1625 14941742543340.1750 15951752553350.1875 16961762563360.2000 17971772573370.2125 18981782583380.2250 19991792593390.2375 201001802603400.2500 211011812613410.2625 221021822623420.2750 231031832633430.2875 241041842643440.3000 251051852653450.3125 261061862563460.3250 271071872573470.3375 281081882583480.3500 291091892593490.3625 301101902603500.3750 311111912613510.3875 321121922623520.4000 331131932633530.4125 341141942643540.4250 351151952653550.4375 361161962663560.4500 371171972673570.4625 381181982683580.4750 391191992693590.4875 401202002703600.5000 411212012713610.5125 421222022723620.5250 431232032733630.5375 441242042743640.5500 451252052753650.5625 461262062763660.5750 471272072773670.5875 481282082783680.6000 491292092793690.6125927 902919907920908921909926903501302102803700.6250511312112813710.6375521322122823720.6500531332132833730.6625541342142843740.6750551352152853750.6875561362162863760.7000571372172873770.7125581382182883780.7250591392192893790.7375601402202903800.7500611412212913810.7625621422222923820.7750631432232933830.7875641442242943840.8000651452252953850.8125661462262963860.8250671472272973870.8375681482282983880.8500691492292993890.8675701502303003900.8750711512313013910.8875721522323023920.9000731532333033930.9125741542343043940.9250751552353053050.9375761562363063960.9500771572373073970.9625781582383083980.9750791592393093990.9875The target frequency pairs of 927.2125 / 902.2125 and 927.2250 / 902.2250 use FCC channels 17 and 18 respectively.Programming ProcedureI. Launch KPG-25D.exe and start with an empty template by selecting New from the File menu.II. Set the Model to TK-941.III. Select Feature Option from the Edit menu.IV. Set the T.O.T. (Dispatch) parameter to 600. This is the transmission time limit, in dispatch mode, expressed in 15 seconds per step with a range of from 15 seconds to 600 seconds. The default is 60 seconds. These are set to 10 minutes (600 seconds) so that the timers in the repeater controller can be used.V. Set the T.O.T. (Tel)parameter to 600. This is the transmission time limit, in telephone mode, expressed in 15 seconds per step with a range of from 15 seconds to 600 seconds. The default is 180 seconds. These are set to 10 minutes (600 seconds) so that the timers in the repeater controller can be used.VI. Set the Drop out delay time parameter to 1. This sets the time between carrier detect drop out and the resumption of scanning. This parameter can be set from 0 to 254 seconds at 1 second per count. The default is 3 seconds.VII. Set the dwell time parameter to 1. This sets the time between the end of transmission and the resumption of scanning. This parameter can be set from 0 to 254 seconds at 1 second per count. The default is 15 seconds.VIII. Set the Transpond delay time parameter to 3. This sets the delay from the decode of a transpond enabled ID to the beginning of a transpond transmission. This parameter can be set from 0 to 254 seconds at 1 second per count. The default is 3 seconds. If this parameter is set to a value greater than the Drop out delay time then the Drop out delay time will be used as the Transpond delay time.IX. Set the TX inhibit time parameter to 5.0. This parameter sets the period of time that the transmitter is inhibited after an inhibited ID is detected. The value can be set from 0.5 seconds to 8.0 seconds in 0.5 second steps.X. Set the Aux switch parameter to N/A. This parameter toggles the following functions off:A. N/A: No functionB. Option Sig: Option signaling board reset switch.C. Manual Relay: Auxiliary output signal ON/OFF.D. Horn Alert: Horn Alert ON/OFFE. Telephone Search: Automatically searches for a vacant telephone channel (trunked system).F. ALP/Sys.Grp.: Toggle display between alphanumeric or the system & group number.G. Fixed Call: Reset radio to a pre-programmed system & group.H. Del/Add: Provides the user system Delete / Add button.XI. Set the Scan switch parameter to List scan. This parameter sets the scan type selection as follows:A. N/A:Disables the scan switch function and sounds an alert tone (if programmed) when the scan key ispressed.B. List Scan: Automatic roaming scan.C. Fix System Scan: Operator selectable system scan.XII. Set the Revert sys type parameter to Last Use. This parameter sets the programmable transmit destination system & group during scanning. Options include:A. Last Used: Last transmitted system & group.B. Last Called: Last received system & group.XIII. Set the Free System ring back parameter to No. This feature is only active during telephone use (trunked system). The radio will beep when the telephone interconnect line is not busy.XIV. Set the Clear to talk beep parameter to Yes. Upon successful access of a trunked system, this beep tone sounds to alert the user they can begin speaking.XV. Set the System search parameter to None. While a selected system is busy (the radio sounds an intercept tone) then release the PTT key, the radio will start to search for an available system automatically or manually. Options include:A. None: Disable system search.B. Auto: During the intercept tone, keep the PTT key held down and press the SCAN key. Upon release of theSCAN key, system search begins.C. Manual: During the intercept tone, releasing the PTT will initiate auto system search.XVI. Set the Display Character parameter to Grp Name. This parameter selects the display character Group name (Alphanumeric) or System & Group number. If you select the AUX switch as the display character, this selection will be just as default. Options include:A. Sys Grp: Set the display character as System & Group number.B. Grp Name: Set the display character as alphanumeric (pre-programing necessary).XVII. Set the Minimum volume parameter to 0. The minimum volume is the level which will be set automatically every time you turn on the radio. If the volume is adjusted below this level prior to turning the radio off, the volume will be set to this level the next time the radio is turned on. In order to ensure that the speaker is quiet at the repeater site, this value is set to zero. The default value is 8.XVIII. Set the Off hook scan parameter to Disable. The radio is able to scan, even with the mic off hook. Options include:A. Enable: Scan start & stop is independent of the mic hook switch.B. Disable: Mic must be on hook for scanning to start.XIX. Set the Off hook horn alt parameter to Disable. Horn alert is auto disabled when the microphone goes off hook Options include:A. Enable: Off hook auto disable.B. Disable: Manual disable only.XX. Set the Off hook decode parameter to Enable. The radio is still tone squelched, even though the mic is in the off hook condition (valid for QT, DQT and Option Signaling board decode). Options include:A. Enable: Decode signaling active even in the off hook condition.B. Disable: Decode signaling is disabled during off hook.Setting this parameter to Enable allows the radio to operate in decode without having to wire the off-hook signal to the on-hook position.XXI. Set the Access logic sig parameter to Sngl. Pulse. This logic signal is useful for external radio control unit (i.e. Mobile Data Terminal, Computer Aided Dispatch or Over The Air Re-Programming etc) that require a signal at the time of successful trunked repeater access. Options include:A. Continuous: Logic Level high during length of access.B. Sng. Pulse: Logic level high pulse at the time of a successful handshake.XXII. Set the Horn alt logic sig parameter to Pulse. The Horn Alert logic can be used to drive a vehicle horn relay, light or other device. The logic level signal can be set for a continuous (EX: light) or momentary pulse output (EX: vehicle horn relay). Options include:A. Continuous: Continuous logic level low output until reset.B. Pulse: Momentary logic level low output.XXIII.The options should now appear as:XXIV. Layout all of the repeater input frequencies in the first group. Setup each repeater output frequency in a separate system. Using the Kenwood3.exe program, the hexadecimal representation of each frequency can be determined (as seen in the table below).Group & System ConfigurationGroup 1Group 2Group 3Group 4Group 5Group 6Group 7Group 81KC7MCCTX A927.2125CarrierCH. 170xD197KC7MCCTX A927.2125EncodeCH. 170xD197KC7MCCRX A902.2125CarrierCH. 170x0190KC7MCCRX A902.2125EncodeCH. 170x0190KC7MCCTX B927.2250CarrierCH. 180xD297KC7MCCTX B927.2250EncodeCH. 180xD297KC7MCCRX B902.2250CarrierCH. 180x0290KC7MCCRX B902.2250EncodeCH. 180x0290The carrier access groups are not intended for active use but support test configurations, such as performing a -12 dB SINAD measurement on a receiver.XXV. Set the system configuration to Conventional.XXVI. Hit Enter to edit the system configuration.XXVII. Program each group as follows:A. Set the FCC field to 200.B. Set the transmit Encode field as appropriate.C. Set the receive Decode field as appropriate.D. Set the Grp-Name field as appropriate. Use unique text that will help you identify the group name whenusing the HxD program at a later step.E. Set the TlkArnd field to Yes.F. Leave all other fields at their default values.XXVIII. Save the KPG25D configuration file.XXIX. Exit the KPG25D.exe program.XXX. The KPG25D.exe program will have inserted a value of 0x089B, corresponding to channel 200 or 937.5000 MHz, into each of the frequency slots. The channel numbers are stored as a 16-bit word in little endian format. Endian swapping the default channel value results in a value of 0x9B08, which converts to a decimal value of 39688. The decimal channel value can be determined by subtracting the target frequency from 937.5000 MHz and then dividing by the channel frequency step size of 0.0125 MHz. The resulting value is then subtracted from a value of 38923, converted back to hexadecimal and then endian swapped into little endian format before storing the frequency. This is apparently what the Kenwood3.exe program does (except that the conversion to decimal and endian swapping is not required in programming since little endian is the native format for x86 processors).XXXI. Launch the HxD.exe program.XXXII. Open the KPG25D data file with the HxD program.XXXIII. Locate each frequency entry with a value of 0x089B and edit the value to the appropriate value obtained from the Kenwood3.exe program. The Grp-Name field data will be visible in the window and will help to locate the 0x089B value associated with a specific group name..XXXIV. Save the file and exit the Kenwood3.exe program.XXXV. Launch the KPG25D.exe program.XXXVI. Load the KPG25D data file.XXXVII. A view of the Feature option window will show the new channel data.XXXVIII. Program the radio.Filter InstallationTwo TK-941 radios are used to implement the full-duplex link back-bone, with one radio acting as the transmitter and the other radio acting as the receiver. The front-end filter on the receive radio must be swapped out with a filter that has the bandpass frequency having the receive frequency fall within the bandpass.A hot air SMD station was used to remove the pair of filters from the TK-941 receive radio front-end. 915 MHz filters were then installed using a standard soldering station. Note that the filter terminals did not align with the solder pads on the printed circuit board. The terminals had to be bent in to contact the pads prior to soldering. A check was made, using an Ohm meter, to verify that the terminals did not short to the ground traces surrounding the filter terminal pads.Upon completion of the filter installation, the VCO was adjusted to obtain VCO lock.Repeater Controller Interface - Receive RadioThe repeater controller interface requires access to the COS signal and de-emphasized audio. The signal driving the BASE of Q20 presents an Active LOW COS. Further, the COS signal carries only the COS when programmed for COS access or the logical NAND of COS and Tone Decode when programmed for tone or DCS access. The observed logic level on the COS signal shows 3.6 volts when HIGH.Squelch gated de-emphasized audio is available at the junction of C75 and IC6-13. The signal level of the audio, using a 1KHz tone with 3KHz deviation (as used for a -12 dB SINAD measurement), was observed to be 1.2 Vpp.The following annotated PCB view shows where to connect the COS and Gated Audio signals to interface to the repeater controller.The following image shows the repeater controller interface wires attached to the receive radio. The COS wire is blue. The squelch gated de-emphasized audio is orange. A black ground connection is made at emitter of Q20. A Dremel tool was used to grind a small slot to route the cable out of the RF shielded area where the interface signals are available. A Hot Glue gun was used to fasten down the wires, providing strain relief for the PCB pad connections.The power cable chassis strain relief can be lifted, exposing a small but removable plug. Removing this plug allows for routing of the repeater controller interface wires out of the radio chassis.Repeater Controller Interface - Transmit RadioThe transmit radio requires access to the PTT and Microphone input signals. The front panel was removed in preparation to route wires from under the power cable and on to through the chassis to the front panel PCB.The attachment points on the back of the front panel PCB are well marked as follows:1. PTT: Push-to-talk (Green Wire)2. ME: Microphone Return (audio-signal-ground - Black Wire)3. MI: Microphone Input (Red Wire)。
倍加福编码器

ø48 30˚
ø42 60˚
电气连接
信号 GND Ub A B A B 0 0 Ub Sens 报 警 屏 蔽 NC GND Sens
电 缆 Ø7.8 mm, 12芯 连接器 9416, 12针
白
£ 25 gcm²
£ 25 gcm²
£ 25 gcm²
£ 1.5 Ncm
£ 1.5 Ncm
£ 1.5 Ncm
40/10 N 在最大速度. 6000 min-1/ 最大 . 12000 min-1
60/20 N 在最大速度. 6000 min-1/ 最 大速度. 12000 min-1
40/10 N 在最大速度. 6000 min-1/ 最大 . 12000 min-1
25 % ± 10 %
0 0
附件
型号
附 件
命名/规定特性
订货代码
D1: Ø10 mm, D2: Ø10 mm
9401
连轴器
D1: Ø10 mm, D2: Ø10 mm D1: Ø10 mm, D2: Ø10 mm
9404 9409
D1: Ø10 mm, D2: Ø10 mm
KW
3 x 120˚
增量型旋转编码器 RVI 58
3 x 120˚
RVI 58
外形尺寸
(76)
22
ø48
0.05 A
20 10
46
-0.01 -0.02
ø58
A
ø10
ø36f8
54
0.2 A
夹紧法兰
0.05 A
10 4 3 3
(66) (52) 46
ST汽车SPC58x系列微控制器CAN配置说明说明书

TN1346Technical note SPC58x configuring CAN and CAN-FD bit timing parametersIntroductionThis technical note details how to configure the bit timing and baud-rate for the CAN peripheral available on all ST automotive SPC58x microcontrollers.The document provides a practical description of the configuration registers and some examples that aim to speed up the peripheral setup. The configuration steps are shared among the SPC58 microcontroller family excepting for minor changes especially related to the CAN protocol clock initialization. The differences found for the protocol clock configuration are mainly due to different clock tree; these are detailed inside each microcontroller’s reference manual (see Section 5 Reference documents).This document and related examples will focus on the CAN bit timing and baud-rate configuration of SPC584Cx/SPC58ECx32-bit MCU.CAN overview 1CAN overviewSPC584Cx/SPC58ECx has eight CAN instances embedded in two different subsystems as documented in thedevice reference manual. All the CAN controllers into the same subsystem will share resources like RAM memory,clock, etc.Each CAN subsystem consists of the following major blocks:•Modular CAN cores: The registers of the CAN module can be accessed using the generic slave interface (GSI). The peripheral GSI module enables acts as a request from each master.•CAN-RAM arbiter: it is an additional logic for arbitration between the requests for the RAM access by the various CAN controllers.•SRAM: the CAN subsystem interfaces with an external RAM using this interface, it is the SRAM.•ECC controller: it contains the logic to compute and validate the correction code on the SRAM memory.1.1Peripheral clocksAs described in the device’s reference manual, each CAN instance inside a CAN subsystem needs two differentclocks:•Host clock•Protocol clockNote:refer to the device’s reference manual for this clock routing and details (see Section 5 Reference documents) Note:to achieve a stable function of the peripheral, the host clock must always be faster or equal to the CAN protocol clock.1.2Protocol clock selectionThis paragraph details the protocol clock. It`s the clock used by the CAN controller to define the time quantaperiod and define the bit timing (Baudrate).In this microcontroller family it is possible to choose the protocol clock source between:•XOSC•PLL0The desired configuration is made through the clock generation module (CGM) registers.In this example, the registers for CAN subsystem 1 and 2 are respectively CGM_AC8 and CGM_AC11.See the following figure.Protocol clock selectionCAN clock schemaFigure 1.register and setup the XOSC as CAN protocol clock in CGM_AC8_SC register as below:Supposing to choose the 40 MHz oscillator XOSC this register must be programmed:// Select XOSC as Source clockMC_CGM.AC8_SC.B.SELCTL = 0x01; // 1 it is the default value// enable the dividerMC_CGM.AC8_DC0.B.DE = 0x01// divide input clock by 2MC_CGM.AC8_DC0.B.DIV = 0x01; // the divider is intended one plus the value wrote in register Using the above setup, the protocol clock provided to CAN will have a frequency of 20 MHz that is the XOSC frequency (40 MHz) divided by 2.2Baud rate configurationThis chapter describes how to configure bit timing parameters according to the baud rate value. It aims to provideconfiguration examples for both CAN Standard and CAN-FD.On the base of the protocol clock configuration, in this example the clock is considered running at 20 MHz.It is mandatory to know that the CAN controller divides each bit in an integer number of time-quanta (Tq). Thetime-quanta time is the period of protocol clock:Tq = 1/protocol clockActing on baud-bate pre-scaler (NBRP field of NBTP register) it is possible to define the number of Tq per bit.For example, if it is needed a 1M baud-rate, the bit-time will be 1 µs. If the CAN controller has a Protocol clockof 20 MHz, defining a baud rate pre-scaler equals to “1”, then the Tq will be 50 ns. Dividing the bit time by the Tqtime (protocol clock period) the result is 20 time-quanta per bit.Using a baud-rate pre-scaler equals to “2”, the frequency of protocol clock will be divided by 2 and 10 MHz asprotocol clock will be obtained. So, following the same previous formula, the number of Tq per bit will be 10instead of 20.Note:all the pre-scalers are acceptable for a selected baud-rate. In the previous example, using a pre-scaler value of 3, the protocol clock will be 6.666 MHz (20 MHz / 3 ) and the Tq period will be about 152 ns. Dividing the bittime (1 µs at 1 Mbit/s) for the Tq period the result isn`t an integer number. Since CAN protocol the number ofTq inside a bit must be integer, then the pre-scaler 3 cannot be used for 1 M baud-rate having a protocol clock(coming from CGM clock generation module) of 20 MHz.3Bit timing configurationConfiguring the bit timing registers, it is possible to define the position of the sample point for all the bits that thecontroller gets on the bus and the baud-rate as well.For each bit, three sections are available, as shown in the following figure.Figure 2. Bit timingEach section is composed by a configurable number of time-quanta, except for SYNC_SEG that is alwayscomposed by 1 time-quanta.The sum of SYNC_SEG, TSEG1 AND TSEG2 is equal to the total number of time-quanta that compose the bit.The sample point is where the controller samples the bit and is placed at the end of TSEG1 (or beginning ofTSEG2).Configuring the length of segments TSEG1 and TSEG2 (both expressed in number of time-quanta (Tq)) it isdefined the positioning of the sample point. It must be programmed in the registers NBTP (for arbitration part ofthe message) and DBTP for the data. In CAN-FD mode both registers must be programmed, while in standardCAN mode it is needed to only configure the NBTP register.3.1Standard CAN exampleSupposing it is needed to configure the CAN controller with a 1Mbit/ baud-rate and a sample point of 75% theNBTP register will be programmed as shown below.Figure 3. NBTP registerThe NSJW field is used for the Resynchronization and generally it should <= NTSEG2 value.Supposing to have 20 MHz as protocol clock, and no other pre-scaler must be applied on this frequency, so theNBRP field will be set to 0. In this case the time-quanta will be 1/20000000 = 50 ns. The bit time (the length of abit) at 1 Mbit/s is 1 µs.Dividing the bit time period by the time-quanta period it is seen that one bit contain exactly 20 time-quanta. Note:if the division result is not an integer value user has to try another pre-scaler and so, the sum of segments length NTSEG1 + NTSEG2 = 19 (this because SYNC_SEG is always 1 Tq).Supposing to sample each bit at 75%, then the sum SYNC_SEG + NTSEG1 should be the 75% of total TQnumber per bit that in our case (20 total Tq per bit) is 15 time-quanta.Considering one time-quanta of SYNC_SEG, then the NTSEG1 must be 14 Tq and the remaining 5 Tq are thelength of NTSEG2.At the end, NBTP field values are:•NSJW = 4 (NTSEG2 value)•NBRP to 0•NTSEG1 to 13•NTSEG2 to 4Note:from device’s reference manual: the actual interpretation by the hardware of this value is such that one more than the value programmed here is used (see Section 5 Reference documents)Considering one time-quanta of SYNC_SEG, then the DTSEG1 must be 5 Tq and the remaining 4 Tq are thelength of DTSEG2.The DBTP register fields are:•TDC to 1 (because baud-rate > 1M)•DSJW to 3 (DTSEG2 value)•DBRP to 0•DTSEG1 to 4•DTSEG2 to 3Note:From device’s reference manual: the actual interpretation by the hardware of this value is such that one more than the value programmed here is used. (see Section 5 Reference documents)3.2CAN-FD exampleThis paragraph shows how to configure the bit timing and the baud-rate in case of CAN-FD. The software mustconfigure two registers: NBTP and DBTP, former is for the arbitration part of a message and the latter one forthe data part of the message. The NBTP register programming does not change from the previous example.So below it is showed how to configure the baud-rate for the data part of a message. It is also detailed theconfiguration of transceiver delay compensation for CAN-FD mode (not available on standard CAN).Figure 4. DBTP registerThis register has an extra bit: Transceiver delay compensation (TDC). It enables the use of transceiver delaycompensation and must be set for baud-rate greater than 1 M. Using the TDC, the Software application can alsoconfigure a secondary sample point.The first sample point is to define the segments length in the bit timing configuration (DTSEG1 and DTSEG2),while the second sample point depends on transceiver delay compensation value.Supposing to configure the baud-rate of the message data part at 2 M and the two sample points at 60% and80% of the bit length. Below it will be showed how to program the registers:•TDC to 1 (because baud-rate > 1 M)•DSJW to this is used for the resynchronization and generally it could be equal to DTSEG2 value (maximum synch width).Supposing to have 20 MHz as protocol clock, and no other pre-scaler must be applied on this frequency, so theDBRP field will be set to 0. The time-quanta period will be 1/20000000 = 50 ns. The bit time (the length of a bit) at2 Mbit/s is 500 ns.Dividing the bit time period by the time-quanta period, it can be noticed that one bit contains exactly 10 time-quanta.Note:if the division result is not an integer value user has to try another pre-scaler and so DTSEG1 + DTSEG2 = 9 (this because SYNC_SEG is always 1 Tq).Supposing that it is needed a primary sample point at 60% of bit length then User can easily calculate that is 6 Tqon a bit length of 10 Tq.Considering one time-quanta of SYNC_SEG, then the DTSEG1 must be 5 Tq and the remaining 4 Tq are thelength of DTSEG2.The DBTP register fields are:•TDC to 1 (because baud-rate > 1 M)•DSJW to3 (DTSEG2 value)•DBRP to 0•DTSEG1 to 4•DTSEG2 to 3Note:from device’s reference manual: the actual interpretation by the hardware of this value is such that one more than the value programmed here is used (see Section 5 Reference documents)4Transceiver delay compensationAfter configuring the baud-rate and the primary sample points, the transceiver delay compensation needs to be calculated. The transceiver delay compensation has been added to CAN-FD protocol to compensate CAN transceiver’s loop delay at baud-rate greater than 1M, thereby enabling transmission with higher bit rates during the CAN FD data phase independent of the delay of a specific CAN transceiver. There is a relationship between TDCO (transceiver delay compensation offset) and secondary sample point:Note:this value is declared inside the transceiver specification and often called: loop delay.Secondary sample point position% = TDCO * (protocol_clock_period (ns) * (bitrate(Mbits) / 1000))So: TDCO = secondary sample point position% / (protocol_clock_period (ns) * (bitrate(Mbits) /1000))In this example:TDCO = 0.80 / (50 * 0.002) = 8Figure 5. Transceiver delay timing shows how the transceiver delay compensation works. In a glance, thecontroller calculates the delay between transmit and receive signals and tries to compensate that by using TDCO value. This is to sample, at the correct secondary sample point, where the controller checks the transmission errorsFigure 5.Transceiver delay timingTransceiver delay compensationReference documents 5Reference documents•RM0407, SPC584Cx/SPC58ECx 32-bit MCU family built on the Power Architecture for automotive body electronics applications reference manual•SPC58EHx, SPC58NHx datasheetAcronyms and abbreviations 6Acronyms and abbreviationsTable 1. AcronymsRevision historyTable 2. Document revision historyContentsContents1CAN overview (2)1.1Peripheral clocks (2)1.2Protocol clock selection (2)2Baud rate configuration (4)3Bit timing configuration (5)3.1Standard CAN example (5)3.2CAN-FD example (6)4Transceiver delay compensation (8)5Reference documents (9)6Acronyms and abbreviations (10)Revision history (11)Contents (12)IMPORTANT NOTICE – PLEASE READ CAREFULLYSTMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgement.Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of Purchasers’ products.No license, express or implied, to any intellectual property right is granted by ST herein.Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.ST and the ST logo are trademarks of ST. For additional information about ST trademarks, please refer to /trademarks. All other product or service names are the property of their respective owners.Information in this document supersedes and replaces information previously supplied in any prior versions of this document.© 2020 STMicroelectronics – All rights reserved。
R129编码器H.265 4K HDMI编码器规格书(XE9A60)

Baselineprofile/Mainprofile/Highprofile可选
编码帧率
5-60可调
典型分辨率
(高帧率)
4KDCI
4096x2160@60
4K
3840x2160@60
2K
2560x1440@144
关键帧间隔(帧)
5-300可调
比特率(kbit)
32-100000可调
色彩深度
码流控制
CBR/VBR可选
流
支持RTMP/RTSP/HTTPTS/HTTPFLV/HLS/UDP组播/RTP组播
音频编码
编码采样率
44100/48000可选
编码方法
AAC/AAC+/AAC++/MP3/MP2/AC3可选
编码比特率
AAC:48000-320000可调/AAC+:24000-48000可调/
AAC++:12000-32000可调/MP3:64000-320000可调/
MP2: 64000-320000可调/ AC3:40000-640000可调
左右声道
L+R/L/R可调
数字音量
-50~50可调
PTE流使用G711A编码
禁用/启用可选
ONVIF音频
RTSP流使用G711A编码
禁用/启用/启用且重采样为8K
HDR1010bit
色域
BT601/BT709/BT2020可选
编码后分辨率
4096x2160/3840x2160/1920x1080/1680x1056/1280x720/1024x576/850x480/720x576/720x540/720x480/720x404/704x576/640x480/640x360/608x448/544x480/480x480/480x384/480x360/480x320/480x272/480x270/400x320/400x224/352x480/352x228/320x256/320x240/320x180/240x180/176x144与输入分
VECOAX ULTRA BT系列编码器调制器用户手册说明书
VECOAX ULTRA BT SERIES MANUALVECOAX ULTRA BT encoder modulator is the new generation of intelligent headend processing equipment. This 1-U case comes with 6 independent module slots. Each module can be configured individually based on the applications including encoding, decoding, trans-coding, multiplexing, descrambling and modulating processing and the combination of all these functions. It supports multiple input and output interfaces and signal formats. With its powerful performance and low cost, VECOAX ULTRA BT is especially adequate for the new generation CATV system.Support flexible combination of different type of modulesSupport up to 6 modulesSupport 1 ASI output (Copy as MPTS2 through front panel GE2)Support 2 GE output, 512 SPTS (UDP, RTSP/RTP) output from GE1,8 MPTS (UDP, RTP) output from GE2, Unicast/Multicast, RJ45/SFP interface Support Web management, Updates via webRedundancy Power Supply (Optional)Base Unit Parameters Dimension (W×L×H): 482mm×410mm×44mm Environment: 0~45°C (work); -20~80°C (Storage)Power requirement: AC 110V± 10%, 50/60Hz, AC 220 ± 10%, 50/60HzMODULE SPECIFICATIONS:ASI inputs/outputs: 4 ASI bi-direction, BNC 75ΩIP inputs/outputs: 2 Ethernet Port (100/1000M)Stream connector inputRe-multiplexing: PID remapping, PCR correction, generate PSI/ SI table automaticallyStream In: maximum 4 ASI input, 256×2 IP inputStream Out: maximum 4 ASI output, 4 IP outputMODULE SPECIFICATIONS:ASI inputs/outputs: 5 ASI bi-direction, BNC 75ΩStream connector inputStream in: maximum 5 ASI input Re-multiplexing: PID remapping, PCR correction, generate PSI/ SI table automatically Stream out: maximum 5 ASI outputMODULE SPECIFICATIONS:Input: 4 CVBS video, 4 Stereo Audio (DB9 to RCA)VIDEO ENCODING:Video format: MPEG-2, MPEG4 AVC/H.264Image format: PAL, NTSC SD signalRESOLUTION:PAL:720*576/352*288/320*240/320*180/176*144/160*120/160*90@50Hz NTSC:720*480/352*288/320*240/320*180/176*144/160*120/160*********** Rate Control: CBR/VBRGOP structure: IBBPBVideo bitrate: 0.5~5MbpsAUDIO ENCODING:Audio format: MPEG1 Audio Layer 2, LC-AAC, HE-AAC V2Sampling rate: 48 KHzResolution: 24-bitBit-rate: 48-384Kbps each channelSupport Logo, Caption, and QR Code insertionMODULE SPECIFICATIONS:Input: 8 CVBS video, 8 Stereo Audio (DB15 to RCA) VIDEO ENCODING:Video format: MPEG4 AVC/H.264Image format: PAL, NTSC SD signalResolution: 720×576i, 720×480iRate Control: CBR/VBRGOP structure: IPPVideo bitrate: 1~7Mbps each channelAUDIO ENCODING:Audio format: MPEG-1 Layer 2Sampling rate: 48 KHzResolution: 24-bitBit-rate: 64/128/192/224/256/320/384Kbps each channel Support Logo, Caption, and QR Code insertionMODULE SPECIFICATIONS:Input: 2*HDMI, 2*BNC for CC (Closed Caption) input and stream connector VIDEO ENCODING:Video format: MPEG2 & MPEG4 AVC/H.264Input resolution:1920*1080_60P, 1920*1080_50P, 1920*1080_60i, 1920*1080_50i,1280*720_60p, 1280*720_50P, 720*480_60i, 720*576_50iRate control mode: CBR/VBRAspect ratio: 16:9, 4:3Video bitrate: 0.8~19Mbps for MPEG-2 /H.264 encodingSupport CC (closed caption)AUDIO ENCODING:Audio format: MPEG1 Layer II, MPEG2-AAC, MPEG4-AAC,Dolby Digital AC3 (2.0) encoding (Optional); AC3 (2.0/5.1) pass-through Sampling rate: 48 KHzAudio bitrate: 64Kbps-320kbps each channelVIDEO TRANSCODING:2*MPEG2 HD → 2*MPEG2/H.264 HD; 2*MPEG2 HD → 2*MPEG2/H.264 SD; 2* H.264 HD → 2*MPEG2/H.264 HD; 2* H.264 HD → 2*MPEG2/H.264 SD;4 *MPEG2 SD → 4 *MPEG2/H.264 SD; 4* H.264 SD → 4 *MPEG2/H.264 SD AUDIO TRANSCODING:MPEG-1 Layer 2, AAC and AC3MODULE SPECIFICATIONS:Input: 2*HD-SDI and stream connectorVIDEO ENCODING:Video format: MPEG2 & MPEG4 AVC/H.264Input resolution:1920*1080_60P, 1920*1080_50P, 1920*1080_60i, 1920*1080_50i,1280*720_60p, 1280*720_50P, 720*480_60i, 720*576_50iRate control mode: CBR/VBRAspect ratio: 16:9, 4:3Video bitrate: 0.8~19Mbps for MPEG-2 /H.264 encoding;Support CC (closed caption)AUDIO ENCODING:Audio format:MPEG1 Layer II, MPEG2-AAC, MPEG4-AAC,Dolby Digital AC3 (2.0) encoding (Optional), AC3 (2.0/5.1) pass-through Sampling rate: 48 KHzAudio bitrate: 64Kbps-320kbps each channelVIDEO TRANSCODING:2*MPEG2 HD → 2*MPEG2/H.264 HD; 2*MPEG2 HD → 2*MPEG2/H.264 SD; 2* H.264 HD → 2*MPEG2/H.264 HD; 2* H.264 HD → 2*MPEG2/H.264 SD;4 *MPEG2 SD → 4 *MPEG2/H.264 SD; 4* H.264 SD → 4 *MPEG2/H.264 SD AUDIO TRANSCODING:MPEG-1 Layer 2, AAC and AC3MODULE SPECIFICATIONS:Input: 4*HDMIVIDEO ENCODING:Video format: MPEG-4 AVC/H.264Input resolution:1920×1080_60P, 1920×1080_50P, 1920×1080_60i, 1920×1080_50i,1280×720_60P, 1280×720_50P, 720×576_50i, 720×480_60iGOP structure: IBBPVideo bitrate: 0.8Mbps~19Mbps each channelRate Control: CBR/VBRAUDIO ENCODING:Audio format: MPEG1 Layer II, (MPEG-2 AAC, MPEG-4 AAC Optional), AC3 pass-throughSampling rate: 48 KHzResolution: 24-bitAudio bitrate: 64Kbps~320Kbps each channelAudio Gain Control: 0-400MODULE SPECIFICATIONS:Input: 4*HDMI/4*SDIVIDEO ENCODING:Video format: MPEG-4 AVC/H.264Input resolution: 1920×1080_60P, 1920×1080_60i, 1920×1080_50P,1920×1080_50i,1280×720_60P, 1280×720_50P, 720×576_50i, 720×480_60i,Output resolution: 1920×1080_30P, 1920×1080_25P, 1280×720_30P, 1280×720_25P, 720×576_25P,720×480_30P,GOP structure: IP…P (P Frame adjustment, without B Frame)Video Bit-rate: 1Mbps~13Mbps each channelRate Control: CBR/VBRAUDIO ENCODING:Audio format: MPEG1 Layer II, support audio gain adjustmentSampling rate: 48 KHzResolution: 24-bitAudio Bit-rate: 64kbps,128Kbps,192kbps,224kbps,256kbps,320kbps,384kbps Support Logo, Caption, and QR Code insertionMODULE SPECIFICATIONS:Input: Stream connectorResolution: 480i, 576i, 720P@50, 720P@60, 1080i@50, 1080i@60, 1080P@50, 1080P@60VIDEO TRANSCODING:2*MPEG-2/ H.264/ AVS/AVS+ HD/SD → 2* H.264 HD/SDVideo Bit-rate: 1~19.5Mbps each channelRate Mode: CBR/VBRGOP Strut: IBBP, IPPP, IBPAUDIO TRANSCODING:MPEG-1 Layer II, LC/HE-AAC, AC3, DRA→ MPEG-1 Layer II, LC/HE-AACAudio bitrate: 64/96/128/192/256/320/384KbpsAudio Gain Control: 0-100MODULE SPECIFICATIONS:Data input: 512×2 IP input over UDP/RTP, 2 GE Ports (RJ45/SFP), and Stream connectorData output: 16 or 32 IP output over UDP/RTP/RTSP, unicast/multicast, 2 GE Ports (RJ45/SFP)Trans Rate: Max 840Mbps/GE PortRF output (F type): 16/32 channels of multiplexing, scrambling and modulation.MULTIPLEXING:Maximum PID Remapping: 180 output pids per channel for DX316, 256 output pids per channel for DX332Function: PID remapping (automatically or manually), Accurate PCR adjusting, generate PSI/SI table automaticallySCRAMBLING:Maximum simul-crypt CA: 4Standard: ETR289, ETSI 101 197, ETSI 103 197Connection: Local/remote connectionMODULATION:Standard: EN300 429/ITU-T J.83A/B (DVB-C)MER: ≥40dBRF frequency: 50~960MHz, 1 KHz stepRF output level: -20~+10dBm (87~117 dBµV), 0.1dB step for all carriers Symbol Rate: 5.0Msps~7.0Msps, 1ksps steppingConstellation: 16/32/64/128/256QAMDX316 Output: 16 non-adjacent carrier outputs within 192M bandwidth DX332 Output: 32 non-adjacent carrier outputs within 384M bandwidthMODULE SPECIFICATIONS:Data input: Stream connector256 IP input over UDP/RTP, 2GE Ports (RJ45/SFP) ——256 IP input over UDP/RTP, 2GE Ports (RJ45/SFP) ——Data output: 8 IP output over UDP/RTP/RTSP, unicast/multicast, 2 GE Ports (RJ45/SFP)Trans Rate: Max 840Mbps/GE PortRF Output (F type): 8 non-adjacent carrier outputs within 192M bandwidth MULTIPLEXING:Channel Number: 8 multiplexing channelsMaximum PID Remapping: 180 output PIDS per channelFunction: PID remapping (automatically or manually), Accurate PCR adjusting, generate PSI/ SI table automaticallyMODULATION: (8*DVB-T)Standard: ETSI EN300 744 MER: ≥40dBRF Frequency: 50~960MHz, 1 KHz stepConstellation: QPSK/16QAM/64QAM Bandwidth: 6/7/8 MHzTrans mode: 2K/4K/8K FEC: 1/2, 2/3, 3/4, 5/6, 7/8RF Output Level: -20~+10dBm (for all carriers), 0.5dB stepMODULE SPECIFICATIONS:Data input: 32×6 IP input over UDP/RTP, 2 GE Ports (RJ45/SFP) and stream connectorData output: 6 IP output over UDP/RTP/RTSP, unicast/multicast, 2 GE Ports (RJ45/SFP)Trans Rate: Max 840Mbps/GE PortRF output (F type): 6 channels of multiplexing and modualtion.MULTIPLEXING:Maximum PID Remapping: 180 output pids per channelFunction: PID remapping (automatically or manually), Accurate PCR adjusting, generate PSI/ SI table automaticallyMODULATION:Standard: ARIB STD-B31Bandwidth: 6M Constellation: QPSK, 16QAM, 64QAM Guard Interval: 1/32, 1/16, 1/8, 1/4 Transmission Mode: 2K, 4K, and 8K Code rate: 1/2, 2/3, 3/4, 5/6, 7/8 MER: ≥40dBRF frequency: 50~960MHz, 1 KHz stepRF output level: -20dBm~+10dBm (87~117dBµV), 0.1dB steppingMODULE SPECIFICATIONS:Stream in: 4 Tuner input, F TypeStandard: DX904: DVB-S/S2; DX914: DVB-C; DX944: DVB-T/T2DVB-S DVB-S2Input Frequency: 950-2150MHz 950-2150MHzSymbol Rate: QPSK 1~45 Msps QPSK/8PSK 1~45 Msps,16APSK 1~45 Msps,32APSK1~32 Msps(16APSK&32APSK are optional as required)FEC Demodulation:1/2, 2/3,3/4,5/6,7/8 1/2, 2/3,3/4,5/6,7/8,4/5,5/6,8/9, 9/10Signal Strength: -65 ~ -25dBmDVB-C Standard: J.83A (DVB-C), J.83B, J.83CInput Frequency: 30-1000MHzConstellation: 16/32/64/128/256 QAMDVB-T/T2: Standard: DVB-T/T2Input Frequency: 30 MHz~1000 MHzBandwidth: 6M, 7M, 8MPLP Index:0,1,2,3(for DVB-T2)MULTIPLEXING:Maximum PID Remapping: 256 inputFunction: PID remapping (automatically/ manually), Accurate PCR adjustMODULE SPECIFICATIONS:ASI input/output: 2 ASI bi-direction, BNC 75Ω Stream Connector input Decoding:Video/Audio Out: 2 HD/SD SDI output Video Format: MPEG-2, MPEG-4 AVC/H.264Resolution: 480i,480p,576i,576p,720p@50/59.94/60,1080i@50/59.94/60 Chroma: 4:2:0Audio Format: MPEG1 Layer2, LC-AAC, HE-AAC, AC3 (2.0/5.1), AC3 Pass-through, Support Dual Audio Out Support CC/Subtitle1ASI/Mux out2Hard factory reset switch3Indicators4 DATA Port (NET1 and NET2 for IP stream output, Net 3 for web-based management)5Port for module card firmware installationThis section is to explain the cautions the users must know in some case that possible injure may bring to users when it’s used or installed. For this reason, please read all details here and make in mind before installing or using the product.• Must be operated and maintained free of dust or dirty.• The cover should be securely fastened, do not open the cover of the products when the power is on.• After use, securely stow away all loose cables, external antenna, and others.• When you connect the power source, make sure if it may cause overload. • Avoid operating on a wet floor in the open. Make sure the extension cable is in good condition• Make sure the power switch is off before you start to install the deviceConnecting Grouding Wire and Power CordAcquisition Check Installing DeviceSetting Parameter Running DeviceConnecting Signal cable•All function modules’ good grounding is the basis of reliability and stability of devices. Also, they are the most important guarantee of lightning arresting and interference rejection. Therefore, the system must follow this rule. •Grounding conductor must adopt copper conductor in order to reduce high frequency impedance, and the grounding wire must be as thick and short as possible.•Users should make sure the 2 ends of grounding wire well electric conducted and be anti-rust.•It is prohibited to use any other device as part of grounding electric circuit •The area of the conduction between grounding wire and device’s frame should be no less than 25 mm2.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedThe default IP address of this device is 192.168.0.136. Connect the PC (Personal Computer) and the device with a net cable, and follow the PVI connection guide to connect to the unit. Set your Local IP to a static IP of 192.168.0.100.Refer below on how to do so.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedOn Windows open your control panelCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedOnce on control panel, open Network and Sharing (Network and Internet for Windows8 and above)Once you have Network and Sharing Center open, click on “Change adapter settings.”Right Click on your Local Ethernet connection and click on “properties.”4(TCP/IPv4),” and click on, “Properties.”Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedIn the Properties change your IP address from auto to Static and Change the IP address to the required setting to connect to your unit which will be listed in the manual of your Product. Click ok once you are done and close everything. You are now ready to connect to the Web interface of your Unit.EXAMPLEEXAMPLEEXAMPLECopyright 2017 ProVideoInstruments USA – All Rights Are ReservedUse web browser to connect the device with PC by inputting the Encoder & Modulator’s IP address in the browser’s address bar and press Enter.It will display the Login interface as Figure-1. Input the Username and Password (Both the default Username and Password are “admin”.) and then click “LOGIN” to start the device setting.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedWhen we login into unit, it displays the status interface as shown below.Each module will have its own menu system. Use the navigation on the left to go to each installed module to customize your settings.Every module will export to STREAM CONNECT.This is referred as the central hub where all the modules report too.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedIn this example above MODULE 1 and MODULE 2 are exporting their information to STREAM CONNECT.We then go to Stream Connect to tell the unit to export the information out to connector 3 which is module 3 in the Navigation panel.So Module 1 could be an HDMI card and Module 2 could be an ASI cardWe export the signal information from those modules to Stream connect and then want to export it to Connector 3 which will be an RF modulator Card.This example takes two separate inputs and Outputs it in the final format as RF frequency’sCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedNET 1NET 2Here we can adjust the Network settings for the device for each of the ports on the front panel of the unit.NMS – Data Net #3 port IP addressDATA-GEN1 – Net #1 port IP address - This will be the SPTP or Single Port Transport Stream port – Used for streaming your individual channels with different IP’sDATA-GEN2 - Net #2 port IP address – Used for MPTS or Multiport transport stream to stream all your channels on one IP address.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedWe can change the Default password of the unit to a new one of your choice. Please make sure you type it correctly and set it to something you remember oryou will be locked out of the unitCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedHere we can save our configuration for the unit, Restore the last save configuration in case you make a mistake, factory reset the unit back to default, backup your configuration to your desktop as a file, or load a configuration file you saved on your PC.It’s recommenced to save oftenCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedWe can set the system date and time here.You can grab it automatic from your PC or use a NTP server to grab the info automatically. This Time will be used across the board as well as on Broadcasting for TV’s and Streams ifyou wish.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedThe unit is equipped with two network ports. Net 1# and Net #2.Net #1 is used for SPTS- Single Port Transport Streams or One channel per set IPNet #2 is the MPTS-GEN2 – Multiport Transport Stream – All channels output on one IP address as a multicast stream.We can control the MPTS-GEN2 port here under IP StreamChoose which Module to export all its information or channels as a Single Multicast Stream on the Output IP you have set here. Remember this IP address is a Multicast IP that streams under the IP address set in the Network Settings of the unit. Ex: IP set as 192.168.2.136 Mod 1 Exports under the multicast IP as 224.2.2.2:2001. If you don’t understand Multicast IP’s please refer to your IT tech or read up on some information available online.We can choose the Output Protocol as well. UDP/RTP/RTSPIf you wish to do SPTS - Single Port Transport Stream - please refer to Stream Connectfor this function.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedEach Module exports its data or information such as video from a HDMI card to Stream connect. From here we then tell where we would like the information to go too. This goes in the form of Connector 1-6 which is another name for Modules 1-6So we can take the exported video from Module 1 which would be a HDMI card and export it to GEN1- SPTS – which would be Data 1 port on the front for IP Streaming.Example below of moving from the input side – LEFT – to the Output side – RIGHT-When the output program is selected we can click on the name to modify its properties for IP Multicast address if using IP out, VCT, Program information, etcCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedCopyright 2017 ProVideoInstruments USA – All Rights Are ReservedWe can adjust the Encoding or Transcoding settings for this module here. Eachmodule has a separate tab for each input and will vary depending on module.Please read carefully all this manual as it covers ALL and EVERY aspect to set this product as per your needs, using pictures and examples.Should you need any additional support please go to and open a quick ticketIf you require assistance in a remote location please open a ticket and request a scheduled time that both you the user and the support staff can work together to support you.The proper engineer will address your questions very quickly right after you post the ticketTickets works faster and better than phone calls as the tickets are responded directly from the proper engineers to give you a prompt and best solution.We strongly suggest to open a ticket first, so we can better support you.The free tech support is active MON-FRI 10 AM – 4 PM US EST TIME Tickets posted out from this time window or on Saturdays Sundays and US/FL holidays days are responded ASAP the next following business dayIf you need to check your configuration, you will be asked to provide a TEAMVIEWER ID and PASS so our engineers will connect shortly and help you to trouble shoot and set your system together with you. Help on settings is not possible over the phone nor in other ways but the TeamViewer. You can download and install a copy of TEAMVIEWER Version 11 from or we can provide you a temporarily access link by opening a Ticket and requesting support.Copyright 2017 ProVideoInstruments USA – All Rights Are ReservedPro Video InstrumentsENDCopyright 2017 ProVideoInstruments USA – All Rights Are Reserved。
ACCU-CODER编码器应用方式
ACCU-CODER编码器应用方式ACCU-CODER编码器应用:- 机械工具- 机器人技术- 望远镜和天线系统- 可旋转X-Y型定位台- 医疗扫描仪最高转速:6000 转/分孔径:0.250英寸,0.375英寸,6 mm,8 mm,10 mmHS孔公差:-0.0000英寸/ + 0.0006英寸用户转轴径向跳动:0.007英寸用户转轴轴向跳动:±0.030英寸起动扭矩:全通孔:0.3盎司英寸半通孔:0.14盎司英寸最大加速度:1×105 弧度/ 秒2电缆:编织屏蔽电缆外壳:铝制防腐金属外壳安装:沟槽簧片安装和单臂簧片安装选择重量:7盎司Accu-Coder绝对式编码器Accu-Coder,美国Accu-Coder,Accu-Coder编码器,供应Accu-Coder,Accu-Coder编码器。
Accu-Coder的应用:机械工具,机器人技术, 望远镜和天线系统,可旋转X-Y型定位台,医疗扫描仪ACCU-CODER编码器设计特点:- 外形小巧,厚度仅1.55英寸- 全通孔或半通孔选择- 工业规格重载型外壳- 先进的Opto-ASIC设计ACCU-CODER编码器应用:- 机械工具- 机器人技术- 望远镜和天线系统- 可旋转X-Y型定位台- 医疗扫描仪最高转速:6000 转/分孔径:0.250英寸,0.375英寸,6 mm,8 mm,10 mmHS孔公差:-0.0000英寸/ + 0.0006英寸ACCU-CODER编码器应用方式美国960型Accu-Coder编码器是单圈绝对式编码器,在广泛的工业领域中,对有绝对式定位信息应用能提供独有的解决方案。
由于具有外形小巧,厚度仅1.55英寸,多种全通孔和半通孔尺寸选择和简单易用的安装系统,960型的性能是普通绝对式编码器所不能及的。
960型能直接安装在马达转轴上,根本不需要其它绝对式编码器所需要的固定装置、联接和附加设备。
采用先进的Opto-ASIC设计,这种编码器能有效的消除噪音和振动,非常可靠,使用寿命长。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAM58C10-BF6XXR-4096/8192编码器简介 应用行业:
一. BEN 绝对值编码器的常规外形:38MM,58MM,66MM,80MM.100MM.
二. BEN 绝对值编码器分为:单圈,多圈。
三. BEN 绝对值编码器按原理分为:磁绝对值编码器,光电绝对值编
码器
四. BEN 绝对值编码器出线方式分为:侧出线,后出线
五. BEN 绝对值编码器轴分为:6MM,8MM,10MM,12MM,14MM,25MM.
六. BEN
绝对值编码器分为:轴,盲孔,通孔。
七. BEN 绝对值编码器防护分为:IP54-68.
八. BEN 绝对值编码器安装方式分为:夹紧法兰、同步法兰、夹紧带
同步法兰、盲孔(弹簧片,抱紧)、通孔(弹簧片,键销)
九. BEN 绝对值编码器精度分为:单圈精度和多圈精度,加起来是总
精度,也就是通常的多少位(常规24位,25位,30位,32位。
)。
十. BEN 绝对值编码器通讯协议波特率:4800~115200 bit/s,默认为
9600 bit/s。
刷新周期约1.5ms ★精芬机电传感器 * 机床 * 航天航空、 * 造纸印刷、 * 水利闸门、 * 纺织机械 * 灌溉机械 * 军工设备 * 食品机械 * 钢铁冶金设备 * 机器人及机械手臂 * 港口起重运输机械 * 精密测量和数控设备
CAM58C10-BF6XXR-4096/8192编码器 外形尺寸
BEN 编码器的发展,从增量值编码器以转动时输出脉冲,通过计数设备来计算其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。
这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备计算并记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。
解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。
在参考点以前,是不能保证位置的准确性的。
为此,在工控中就有每次操作先找参考点,开机找零等方法。
这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。
BESM58系列绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线。
编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n 位绝对编码器。
这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
BEN 绝对编码器由机械位
置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。
这样,编码器的抗干扰特性、数据的可靠性大大提高了。
详细了解编码器可随时致电021上海39536219精芬机电 ,编码器专家。
BEN编码器从单圈绝对值编码器到多圈绝对值编码器BESM58旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码,只能用于旋转范围360度以内的测量,称为单圈绝对值编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。
BEN编码器上海精芬机电生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多, 这样在安装时不必要费劲找零点, 将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。
多圈式绝对编码器在长度定位方面的优势明显,已经越来越多地应用于工控定位中。
CAM58C10-BF6XXR-4096/8192编码器技术参数。